_Zhu.png)

Force–Position Coordinated Compliance Control in the Adhesion/Detachment Process of Space Climbing Robot


Abstract
1. Introduction
2. Robot Modeling
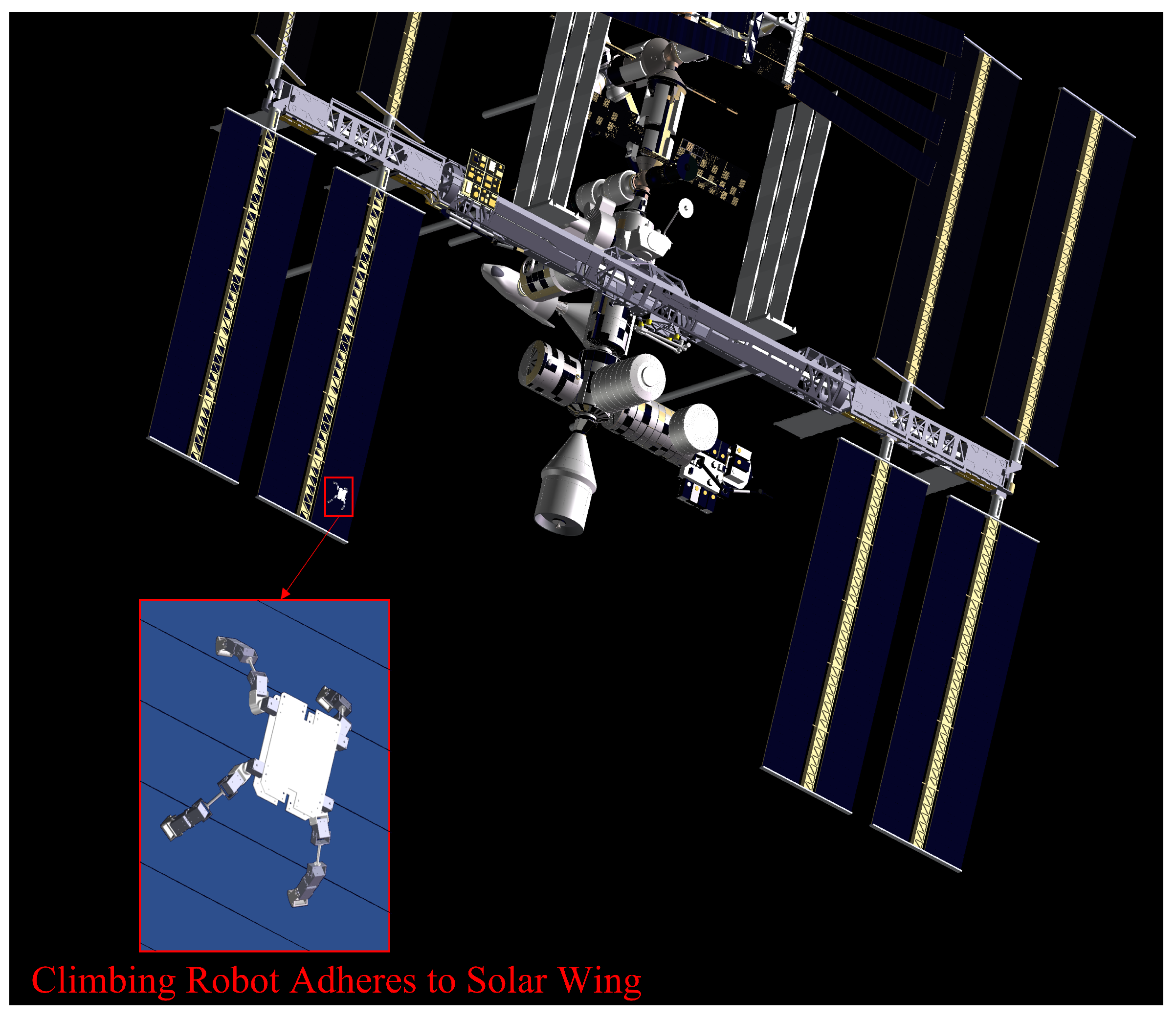
2.1. Task Scenario Description
2.2. Kinematic Modeling
- Each leg of the robot is configured with a yaw–pitch–pitch–pitch joint arrangement. The first three degrees of freedom of the leg allow the controller to control the adhesive foot in Cartesian space, ensuring free movement within the workspace and enabling floating-base torso posture adjustment.
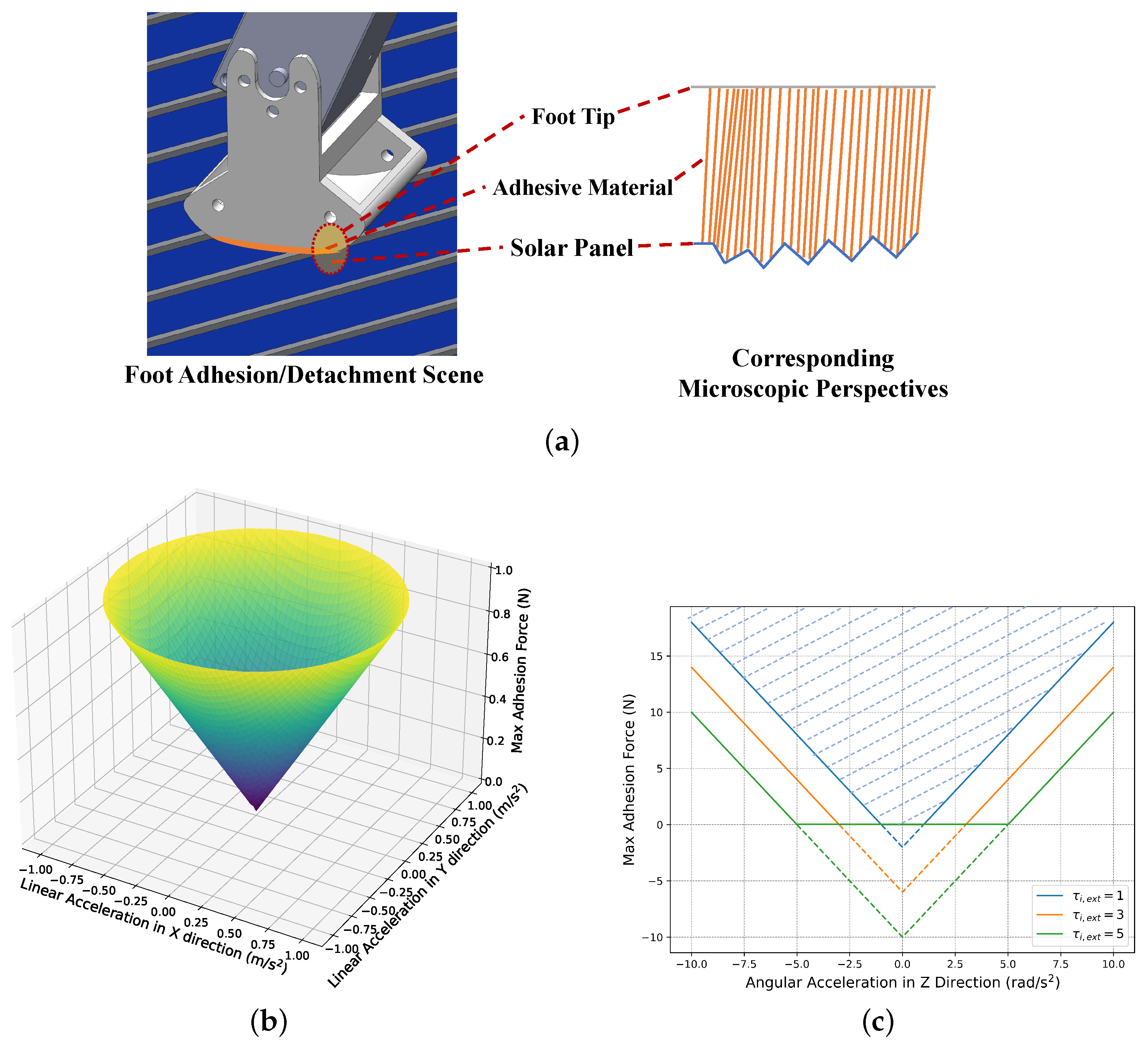
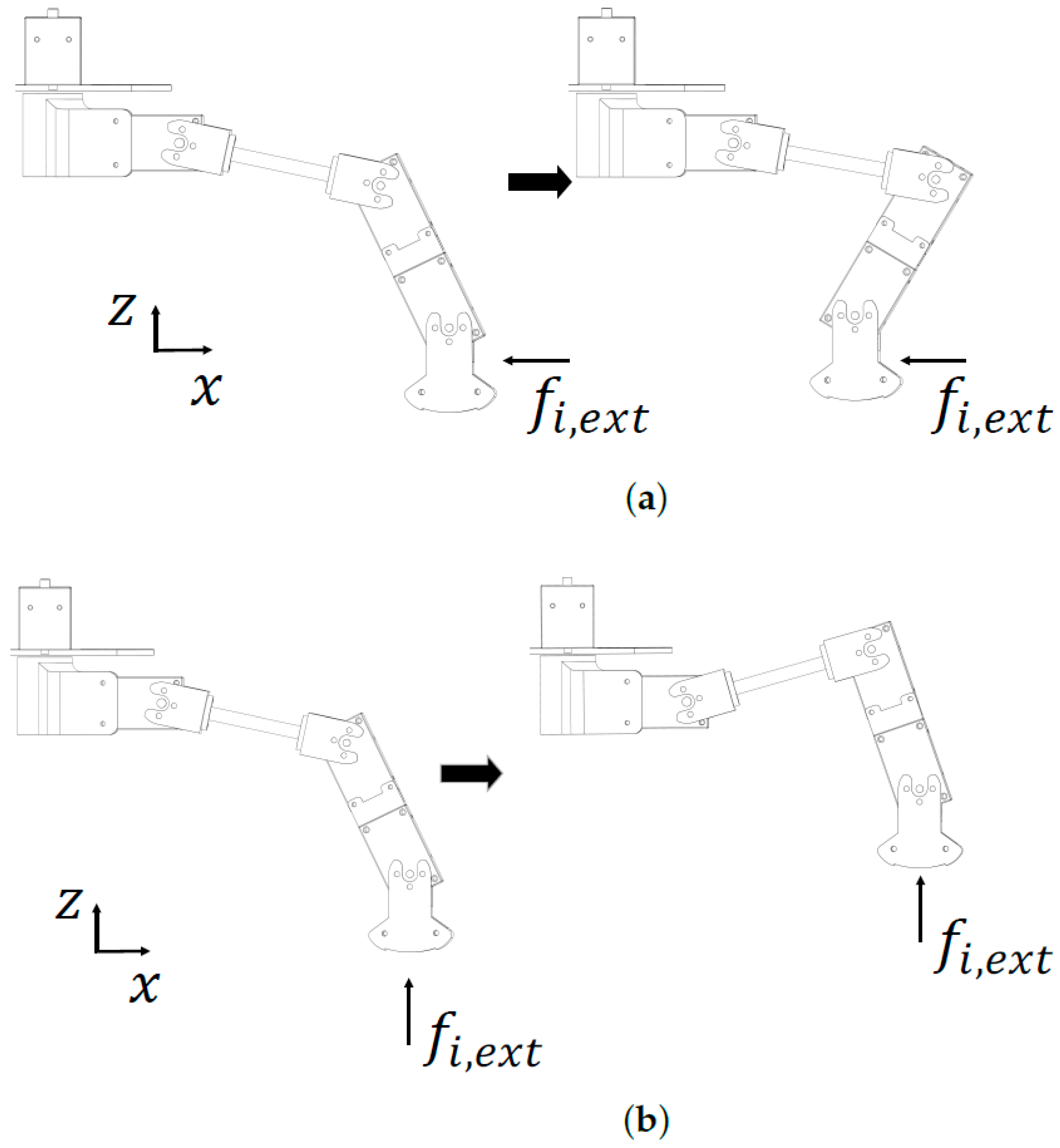
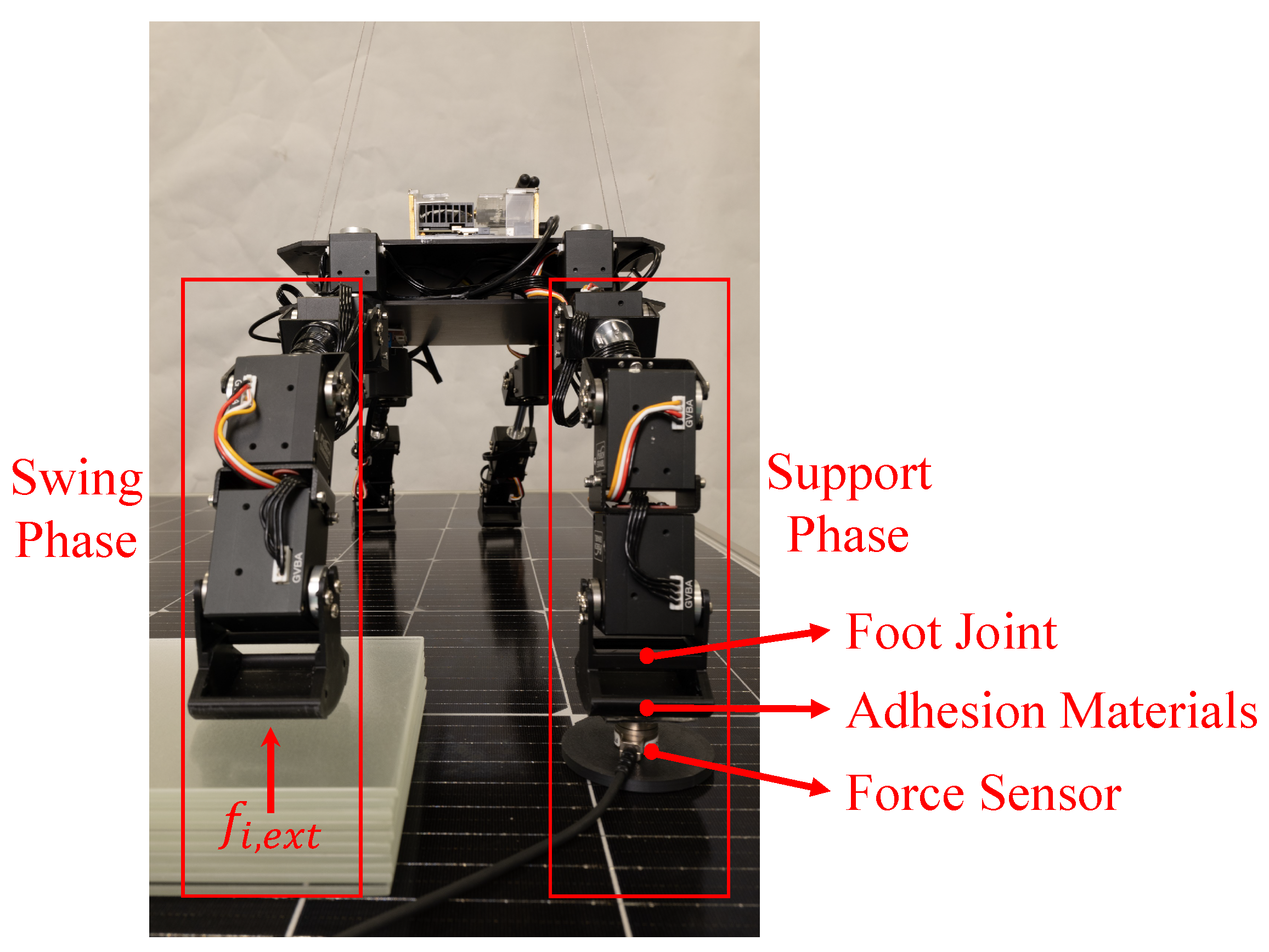
- Unlike traditional spherical point-contact foot models, the robot’s foot is equipped with adhesive material featuring bio-inspired micro-nano structures that create surface contact with the environment. The inclusion of redundant degrees of freedom allows the motors to rotate the foot, controlling its inclination angle. This ensures that during the adhesion process, the adhesive material applies force precisely along the normal direction of the contact surface, while also allowing controlled rotational detachment.
2.3. Dynamic Analysis
3. Control Method Design
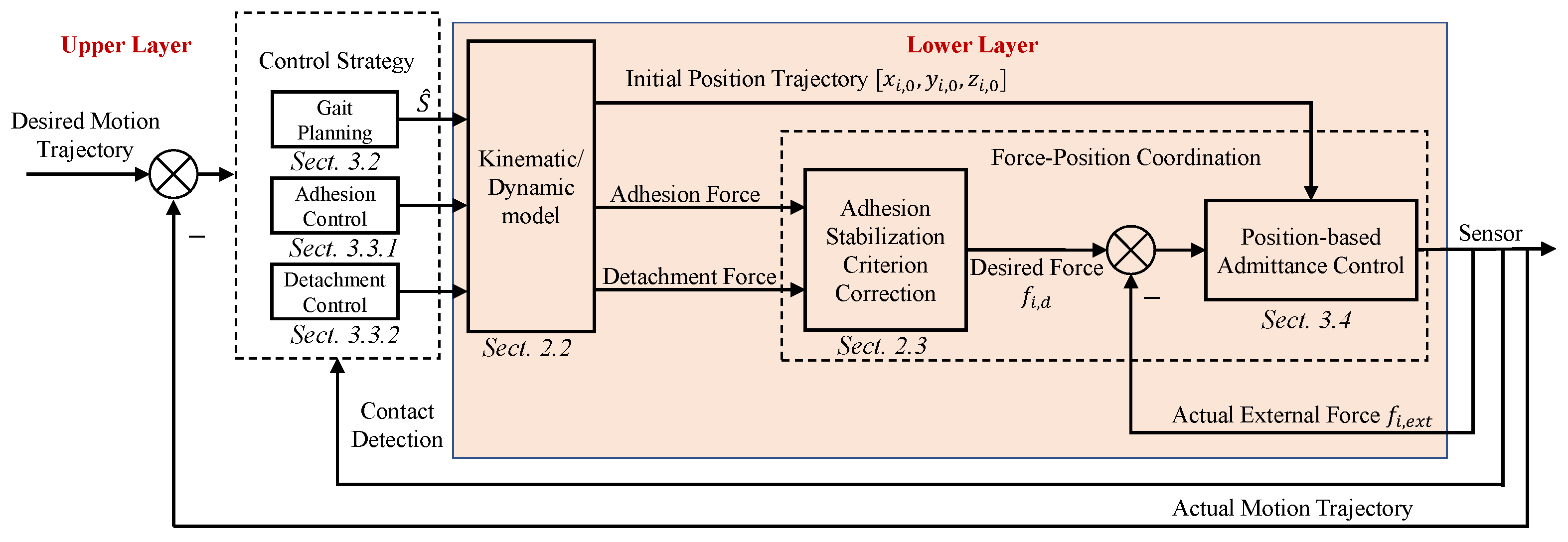
3.1. Hierarchical Modular Control Architecture
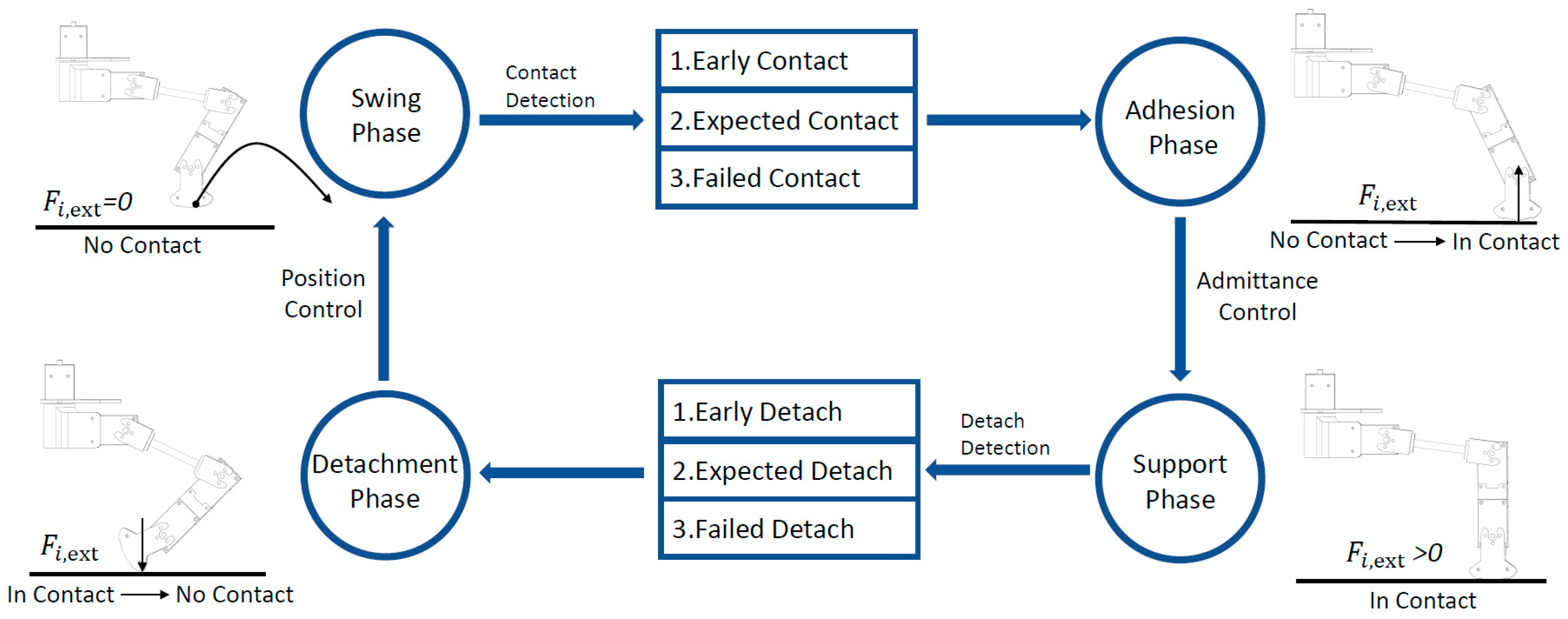
3.2. Four-Phase Gait Planning
3.3. Force-Based Outer-Loop Controller Design
3.3.1. Perception-Based Adhesion Control
3.3.2. Rotational Detachment Control
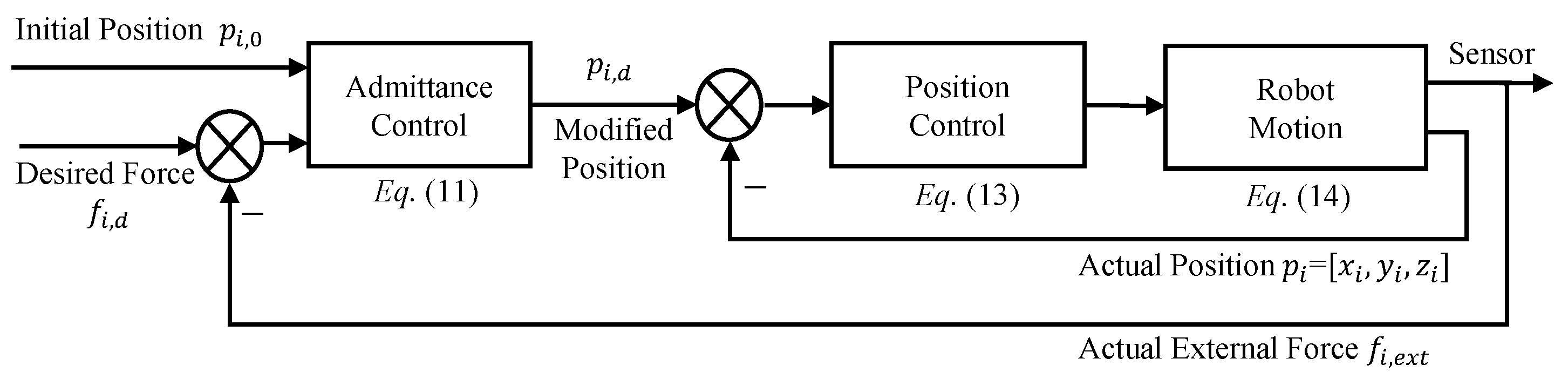
3.4. Position-Based Inner-Loop Admittance Controller Design
4. Simulation Experiments
4.1. Experimental Setup
4.2. Control Simulation
4.3. Summary
5. Climbing Robot Experiments
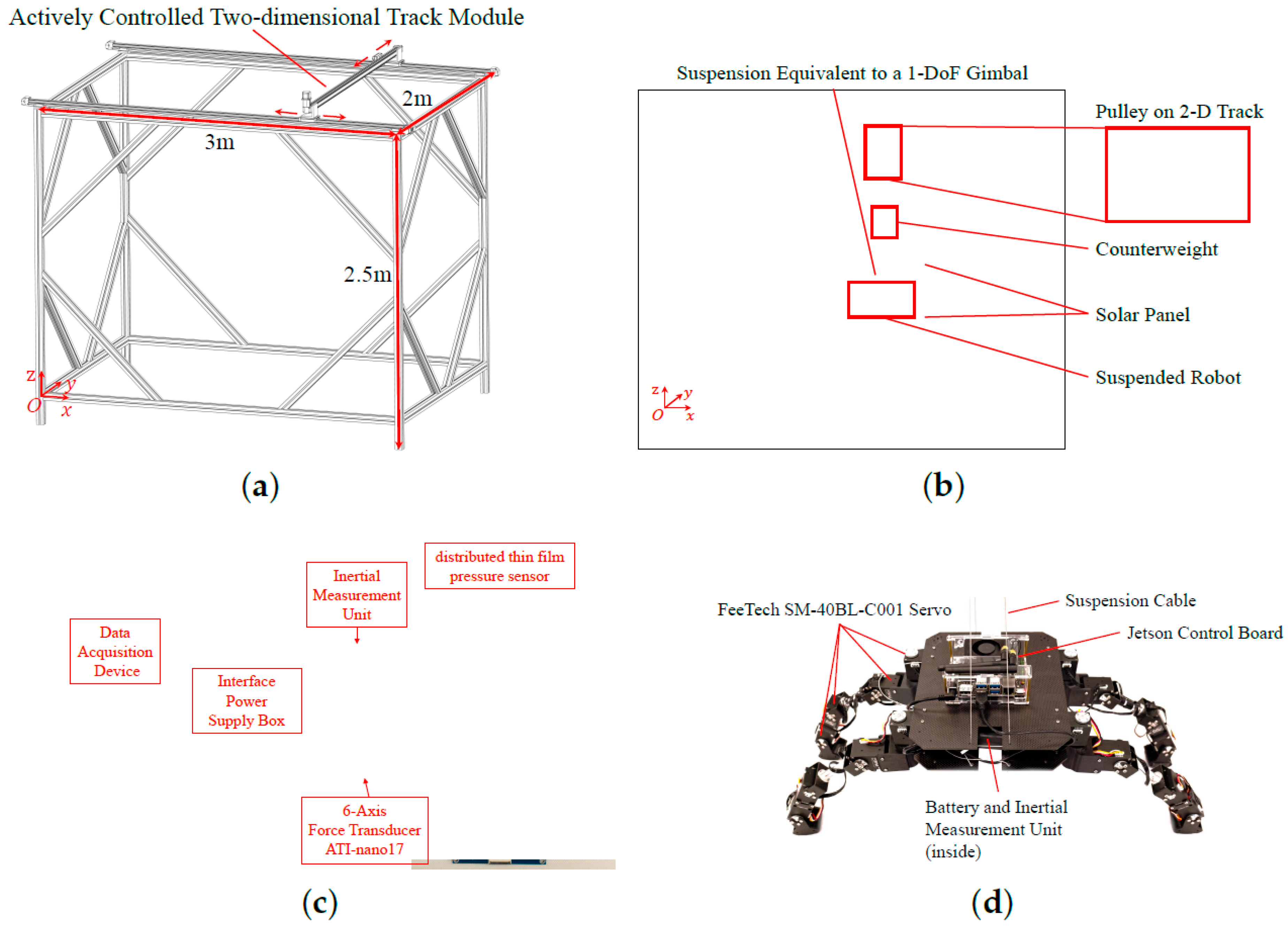
5.1. Experimental Setup
5.2. Experiment for Examining Controller Function
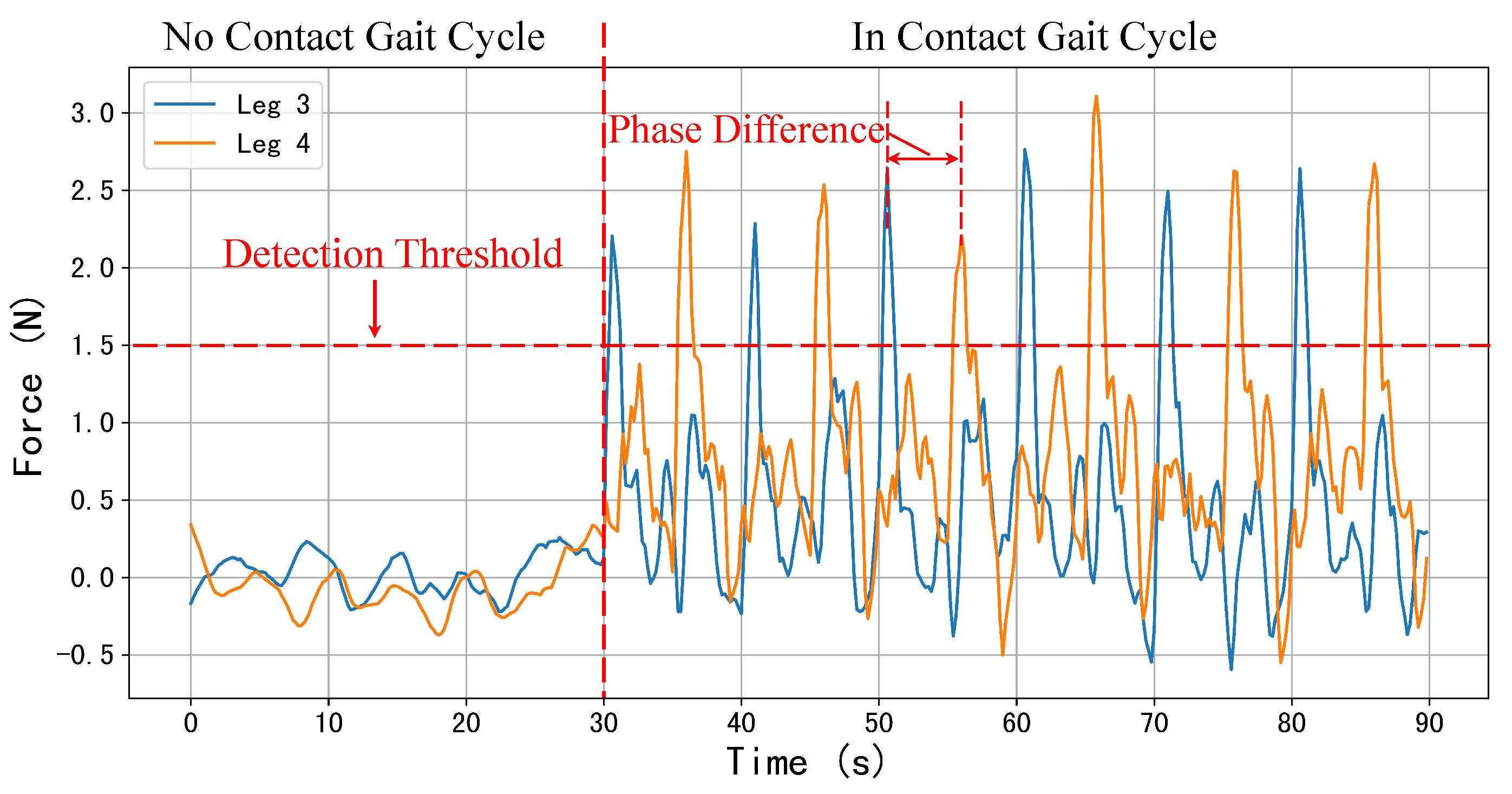
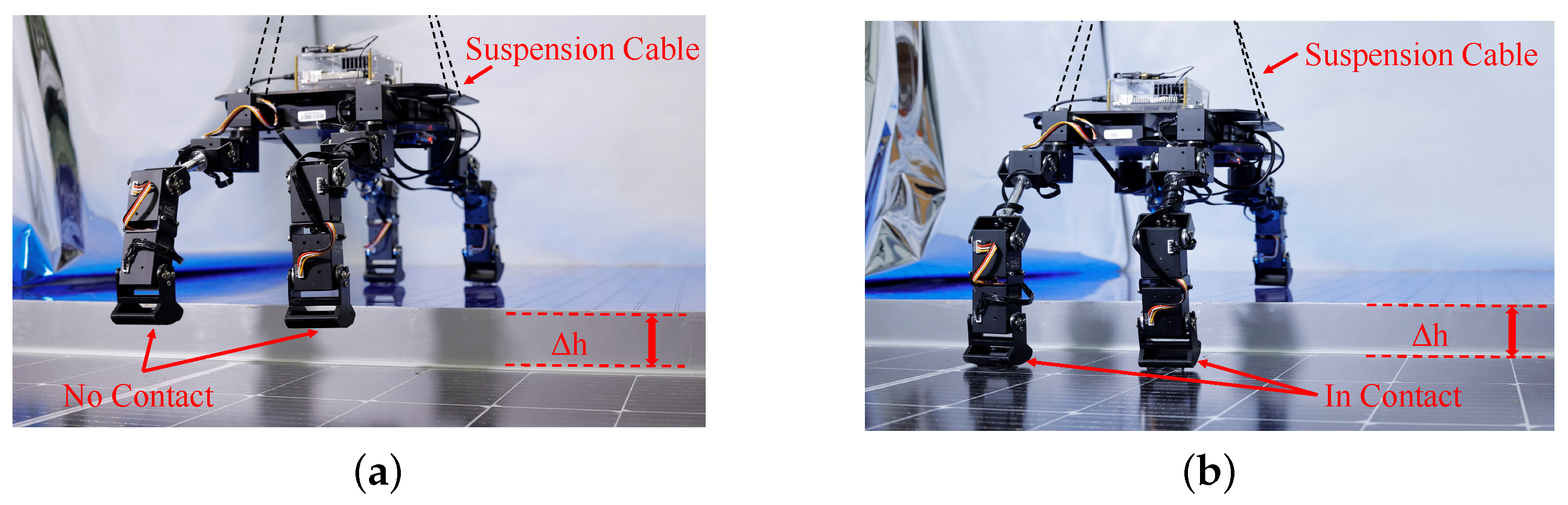
5.2.1. Contact Detection Test at the Foot
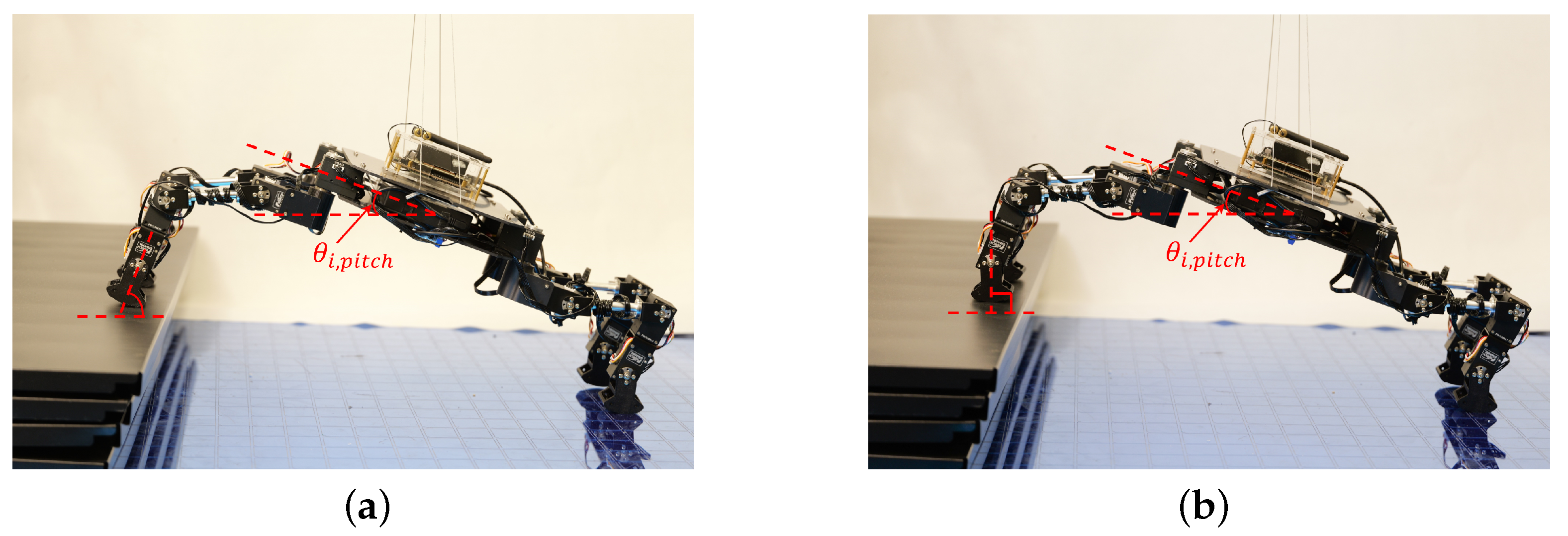
5.2.2. Terrain Detection and Adaptation
5.2.3. Single-Leg Rotational Detachment Control Test
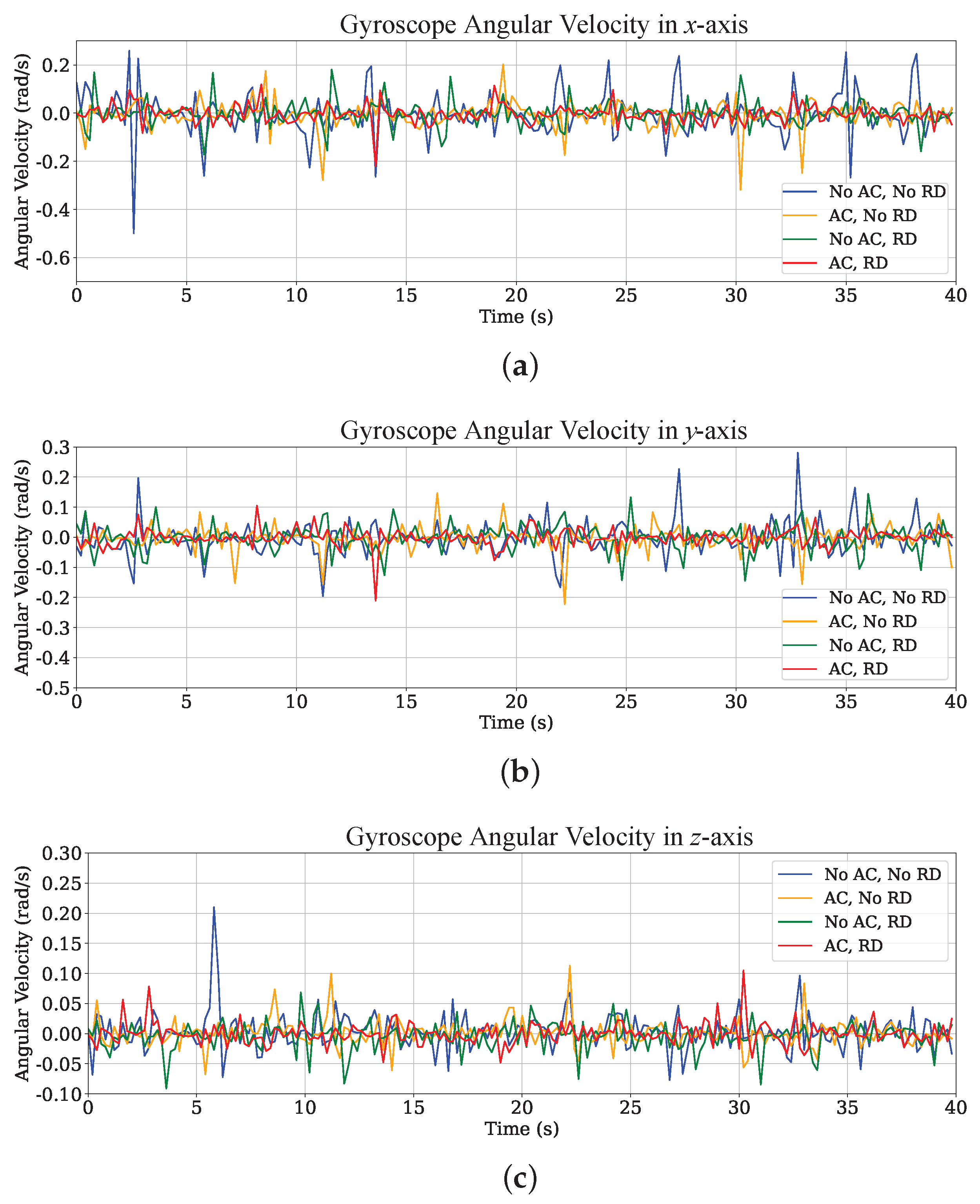
5.2.4. Impact of Compliance Controller on Supporting Leg Loadings
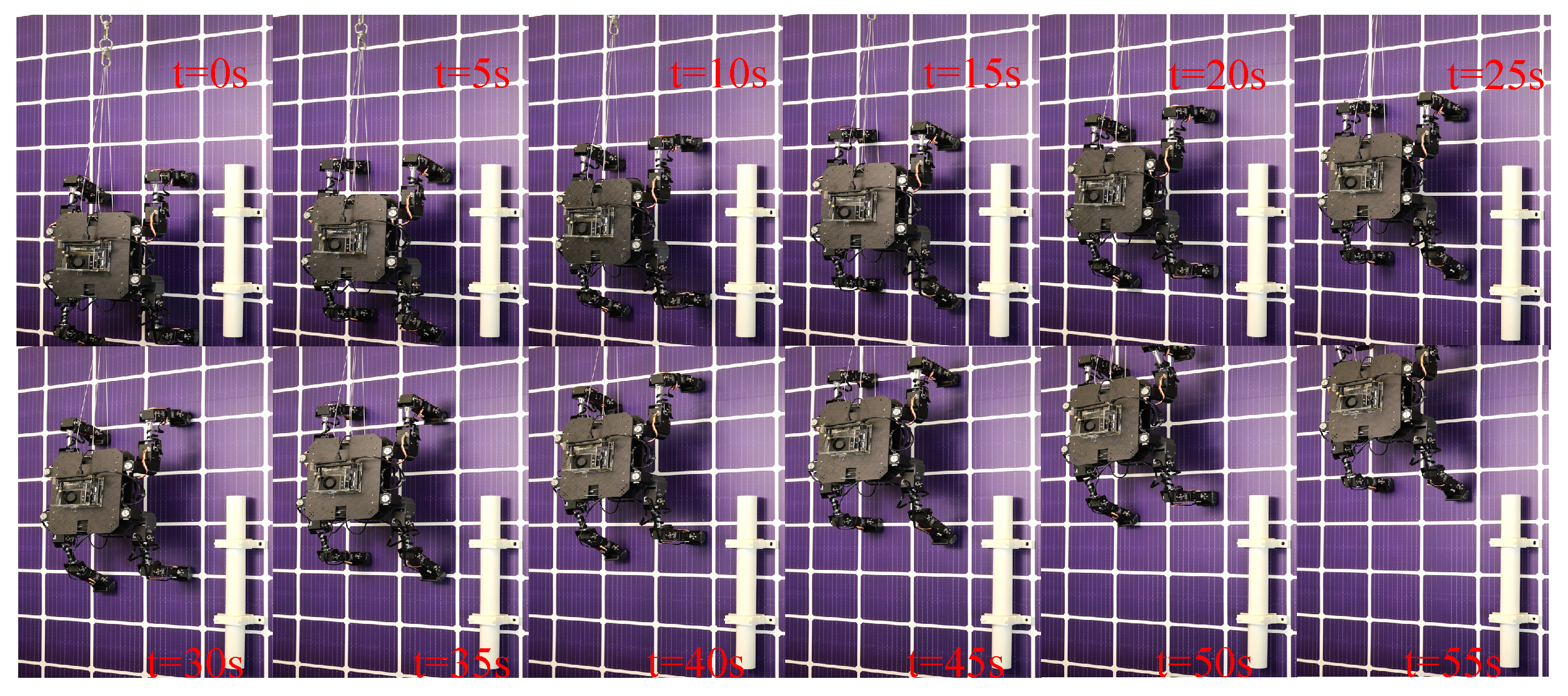
5.3. Comprehensive Climbing Tests on the Vertical Surface
5.4. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| IMU | Inertial measurement unit |
| AC | Admittance control |
| RD | Rotational detachment |
| DoF | Degree of freedom |
| CG | Center of gravity |
| Notation | Definition |
| Coordinate frame of the space station environment | |
| Coordinate frame of the robot body | |
| Mass of the robot | |
| Linear acceleration of the robot’s center of mass | |
| Inertia tensor of the robot relative to its center of mass | |
| P | Linear momentum of the robot |
| L | Angular momentum of the robot |
| A | Centroidal angular momentum matrix of the robot |
| Roll, pitch, and yaw angles of the robot body attitude | |
| i | Index of the i-th leg |
| j | Index of the j-th joint |
| Rotation matrix from the body coordinate system to the environment | |
| coordinate system | |
| Homogeneous transformation matrix from the coordinate system of the -th | |
| joint to the coordinate system of the j-th joint in the kinematics of the i-th leg | |
| Joint angle, link offset, link length, and link twist angle for the i-th leg in DH | |
| parameter representation | |
| Attitude compensation angle obtained by the attitude sensor to maintain the foot | |
| in the normal direction to the contact surface | |
| Position of the robot’s center of mass | |
| Position of the i-th leg’s contact point | |
| v | Posture velocity of the robot |
| Contact-force vector generated at the foot of the i-th leg | |
| Contact-torque vector generated at the foot of the i-th leg |
| Torque at each joint of the i-th leg | |
| Maximum adhesion force of the foot’s adhesive material | |
| Maximum adhesion torque of the foot’s adhesive material | |
| Jacobian matrix of the foot of the i-th leg | |
| Control force expected from the position controller | |
| Proportional, integral, and derivative gains of the position controller | |
| Inertial, damping, and stiffness coefficients of the desired admittance model for | |
| the i-th leg | |
| Current position, velocity, and acceleration of the foot of the i-th leg in the | |
| specified direction of motion | |
| Initial position, velocity, and acceleration of the foot of the i-th leg in the | |
| specified direction of motion | |
| Desired position, velocity, and acceleration of the foot of the i-th leg in the | |
| specified direction of motion | |
| Sum of the (i,2) and (i,3) joint angles at the neutral point | |
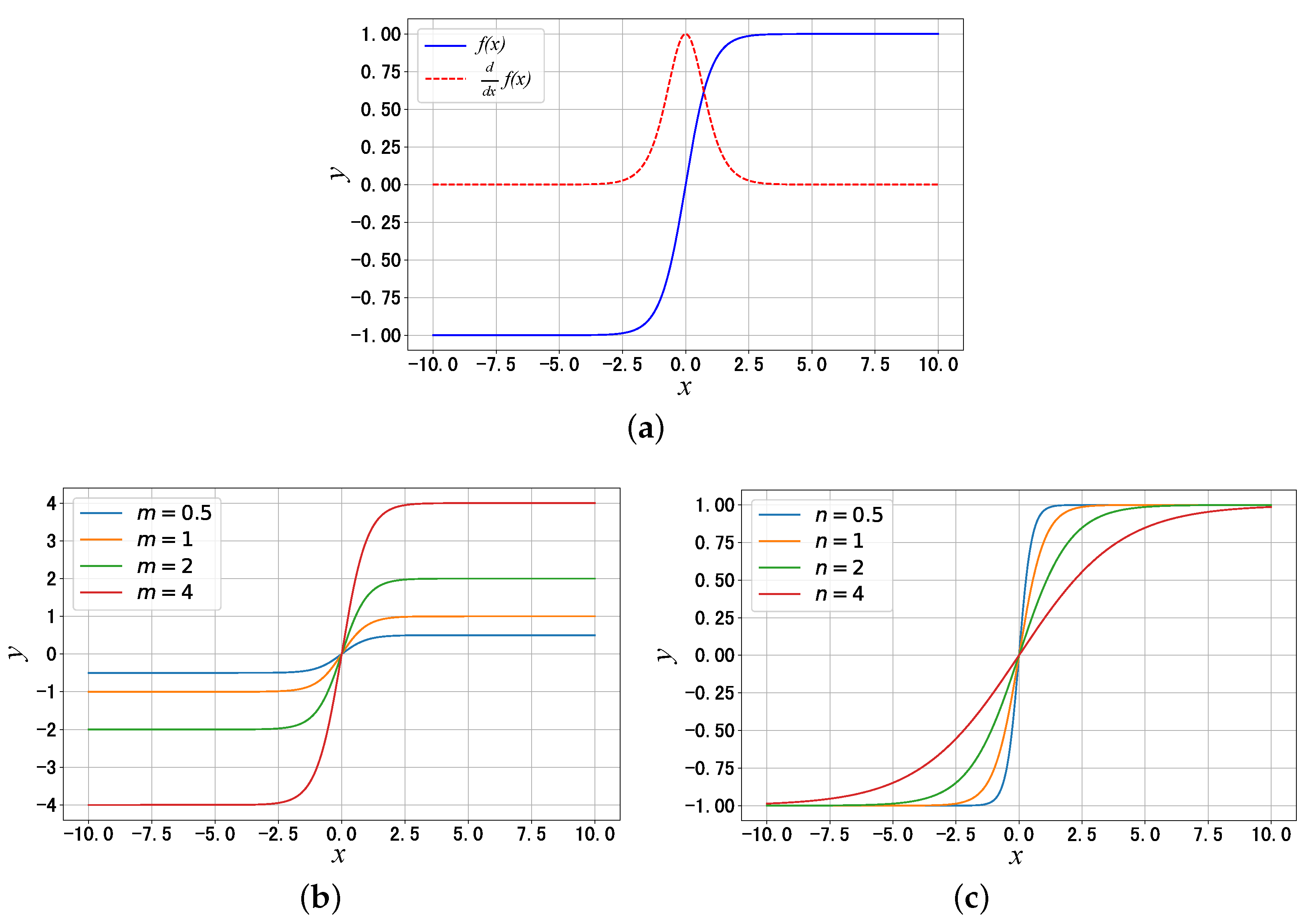
| Hyperparameters of the tanh activation function | |
| Gait cycle of the robot | |
| Support phase, swing phase, adhesion phase, detachment phase |
References
- Ding, X.; Wang, Y.; Wang, Y.; Xu, K. A review of structures, verification, and calibration technologies of space robotic systems for on-orbit servicing. Sci. China Technol. Sci. 2020, 64, 462–480. [Google Scholar] [CrossRef]
- Li, W.J.; Cheng, D.Y.; Liu, X.G.; Wang, Y.B.; Shi, W.H.; Tang, Z.X.; Gao, F.; Zeng, F.M.; Chai, H.Y.; Luo, W.B.; et al. On-orbit service (OOS) of spacecraft: A review of engineering developments. Prog. Aerosp. Sci. 2019, 108, 32–120. [Google Scholar] [CrossRef]
- Gibbs, G.; Sachdev, S. Canada and the International Space Station program: Overview and status. Acta Astronaut. 2002, 51, 591–600. [Google Scholar] [CrossRef] [PubMed]
- Gao, X.; Jin, M.; Xie, Z.; Jiang, L.; Ni, F.; Shi, S.; Wei, R.; Zhu, Y.; Cai, H.; Liu, H.; et al. Development of the Chinese Intelligent Space Robotic System. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 994–1001. [Google Scholar] [CrossRef]
- Barnhart, D.; Sullivan, B.; Hunter, R.; Bruhn, J.; Fowler, E.; Hoag, L.M.; Chappie, S.; Henshaw, G.; Kelm, B.E.; Kennedy, T.; et al. Phoenix Program Status—2013. In Proceedings of the AIAA SPACE 2013 Conference and Exposition, San Diego, CA, USA, 10–12 September 2013. [Google Scholar] [CrossRef]
- Rudin, N.; Kolvenbach, H.; Tsounis, V.; Hutter, M. Cat-Like Jumping and Landing of Legged Robots in Low Gravity Using Deep Reinforcement Learning. IEEE Trans. Robot. 2022, 38, 317–328. [Google Scholar] [CrossRef]
- Harms, S.; Bizcocho, C.G.; Wakizono, H.; Murasaki, K.; Kawagoe, H.; Nagaoka, K. Tetherbot: Experimental Demonstration and Path Planning of Cable-Driven Climbing in Microgravity. Robotics 2024, 13, 130. [Google Scholar] [CrossRef]
- Scherzinger, S.; Weinland, J.; Wilbrandt, R.; Becker, P.; Roennau, A.; Dillmann, R. A walking space robot for on-orbit satellite servicing: The ReCoBot. In Proceedings of the 2022 IEEE 18th International Conference on Automation Science and Engineering (CASE), Mexico City, Mexico, 20–24 August 2022; pp. 2231–2237. [Google Scholar] [CrossRef]
- Nanjangud, A.; Blacker, P.C.; Bandyopadhyay, S.; Gao, Y. Robotics and AI-Enabled On-Orbit Operations with Future Generation of Small Satellites. Proc. IEEE 2018, 106, 429–439. [Google Scholar] [CrossRef]
- Yoshida, K.; Wilcox, B. Space Robots and Systems. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1031–1063. [Google Scholar] [CrossRef]
- Kim, S.; Spenko, M.; Trujillo, S.; Heyneman, B.; Santos, D.; Cutkosky, M.R. Smooth vertical surface climbing with directional adhesion. IEEE Trans. Robot. 2008, 24, 65–74. [Google Scholar]
- Parness, A.; Frost, M.; Thatte, N.; King, J.P.; Witkoe, K.; Nevarez, M.; Garrett, M.; Aghazarian, H.; Kennedy, B. Gravity-independent rock-climbing robot and a sample acquisition tool with microspine grippers. J. Field Robot. 2013, 30, 897–915. [Google Scholar] [CrossRef]
- Parness, A.; Abcouwer, N.; Fuller, C.; Wiltsie, N.; Nash, J.; Kennedy, B. LEMUR 3: A limbed climbing robot for extreme terrain mobility in space. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5467–5473. [Google Scholar] [CrossRef]
- Miyake, T.; Ishihara, H.; Yoshimura, M. Basic studies on wet adhesion system for wall climbing robots. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1920–1925. [Google Scholar]
- Hua, W.; Zhang, W.; Zhang, Z.; Liu, X.; Huang, M.; Igathinathane, C.; Vougioukas, S.; Saha, C.K.; Mustafa, N.; Salama, D.S.; et al. Vacuum suction end-effector development for robotic harvesters of fresh market apples. Biosyst. Eng. 2025, 249, 28–40. [Google Scholar] [CrossRef]
- Bandyopadhyay, T.; Steindl, R.; Talbot, F.; Kottege, N.; Dungavell, R.; Wood, B.; Barker, J.; Hoehn, K.; Elfes, A. Magneto: A versatile multi-limbed inspection robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2253–2260. [Google Scholar]
- Autumn, K.; Liang, Y.A.; Hsieh, S.T.; Zesch, W.; Chan, W.P.; Kenny, T.W.; Fearing, R.; Full, R.J. Adhesive force of a single gecko foot-hair. Nature 2000, 405, 681–685. [Google Scholar] [CrossRef] [PubMed]
- Barabanov, V.; Gulimova, V.; Berdiev, R.; Saveliev, S. Object play in thick-toed geckos during a space experiment. J. Ethol. 2015, 33, 109–115. [Google Scholar] [CrossRef]
- Li, Y.; Krahn, J.; Menon, C. Bioinspired dry adhesive materials and their application in robotics: A review. J. Bionic Eng. 2016, 13, 181–199. [Google Scholar] [CrossRef]
- Tao, D.; Gao, X.; Lu, H.; Liu, Z.; Li, Y.; Tong, H.; Pesika, N.; Meng, Y.; Tian, Y. Controllable anisotropic dry adhesion in vacuum: Gecko inspired wedged surface fabricated with ultraprecision diamond cutting. Adv. Funct. Mater. 2017, 27, 1606576. [Google Scholar] [CrossRef]
- Liu, Y.; Seo, T. AnyClimb-II: Dry-adhesive linkage-type climbing robot for uneven vertical surfaces. Mech. Mach. Theory 2018, 124, 197–210. [Google Scholar] [CrossRef]
- Ribeiro, W.F.R.; Uno, K.; Yoshida, K. Low-Reaction Trajectory Generation for a Legged Robot in Microgravity. In Proceedings of the 2022 IEEE/SICE International Symposium on System Integration (SII), Narvik, Norway, 9–12 January 2022; pp. 505–510. [Google Scholar] [CrossRef]
- Ribeiro, W.F.R.; Uno, K.; Imai, M.; Murase, K.; Yoshida, K. RAMP: Reaction-Aware Motion Planning of Multi-Legged Robots for Locomotion in Microgravity. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29–2 June 2023; pp. 11845–11851. [Google Scholar] [CrossRef]
- Corke, P.I. A simple and systematic approach to assigning Denavit–Hartenberg parameters. IEEE Trans. Robot. 2007, 23, 590–594. [Google Scholar] [CrossRef]
- Dai, H.; Valenzuela, A.; Tedrake, R. Whole-body motion planning with centroidal dynamics and full kinematics. In Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 295–302. [Google Scholar] [CrossRef]
- Orin, D.E.; Goswami, A.; Lee, S.H. Centroidal dynamics of a humanoid robot. Auton. Robot. 2013, 35, 161–176. [Google Scholar] [CrossRef]
- Hogan, N. Impedance Control: An Approach to Manipulation: Part II—Implementation. J. Dyn. Syst. Meas. Control 1985, 107, 8–16. [Google Scholar] [CrossRef]
- Ott, C.; Mukherjee, R.; Nakamura, Y. Unified Impedance and Admittance Control. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 554–561. [Google Scholar] [CrossRef]
- Arakelian, V. Gravity compensation in robotics. Adv. Robot. 2016, 30, 79–96. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | ||||
|---|---|---|---|---|
| j = 1 | 0 | |||
| j = 2 | 0 | 0 | ||
| j = 3 | 0 | 0 | ||
| j = 4 | 0 | 0 |
| Method | Peak Value (rad/s) | Min Value (rad/s) | Standard Deviation |
|---|---|---|---|
| Baseline | 0.259 | −0.499 | 0.089 |
| AC | 0.202 | −0.318 | 0.056 |
| RD | 0.181 | −0.173 | 0.052 |
| AC & RD | 0.120 | −0.221 | 0.037 |
| Method | Peak Value (rad/s) | Min Value (rad/s) | Standard Deviation |
|---|---|---|---|
| Baseline | 0.281 | −0.196 | 0.055 |
| AC | 0.146 | −0.223 | 0.040 |
| RD | 0.145 | −0.145 | 0.044 |
| AC & RD | 0.104 | −0.210 | 0.029 |
| Method | Peak Value (rad/s) | Min Value (rad/s) | Standard Deviation |
|---|---|---|---|
| Baseline | 0.210 | −0.077 | 0.030 |
| AC | 0.113 | −0.068 | 0.022 |
| RD | 0.068 | −0.091 | 0.023 |
| AC & RD | 0.105 | −0.048 | 0.018 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, C.; Zheng, P.; Jing, Z.; Guo, C.; Chen, C. Force–Position Coordinated Compliance Control in the Adhesion/Detachment Process of Space Climbing Robot. Aerospace 2025, 12, 20. https://doi.org/10.3390/aerospace12010020
Wen C, Zheng P, Jing Z, Guo C, Chen C. Force–Position Coordinated Compliance Control in the Adhesion/Detachment Process of Space Climbing Robot. Aerospace. 2025; 12(1):20. https://doi.org/10.3390/aerospace12010020
Chicago/Turabian StyleWen, Changtai, Pengfei Zheng, Zhenhao Jing, Chongbin Guo, and Chao Chen. 2025. "Force–Position Coordinated Compliance Control in the Adhesion/Detachment Process of Space Climbing Robot" Aerospace 12, no. 1: 20. https://doi.org/10.3390/aerospace12010020
APA StyleWen, C., Zheng, P., Jing, Z., Guo, C., & Chen, C. (2025). Force–Position Coordinated Compliance Control in the Adhesion/Detachment Process of Space Climbing Robot. Aerospace, 12(1), 20. https://doi.org/10.3390/aerospace12010020