_Zhu.png)
Rapid SLAM Method for Star Surface Rover in Unstructured Space Environments


Abstract
1. Introduction
- (1)
- Building upon previous outstanding SLAM research, we propose a robust LVI-SAM system that leverages deep learning, further expanding upon the foundation laid by LVI-SAM. This system maintains excellent robustness and localization accuracy in the complex environments encountered on the lunar and Martian surfaces.
- (2)
- We introduce an enhanced SuperPoint feature extraction network model for detecting feature points and matching descriptors. This model dynamically adjusts the feature extraction threshold to achieve a balanced number of feature points, ensuring robust and reliable feature correspondences. This approach guarantees the accuracy of the optimization process at the backend of the SLAM system.
- (3)
- Changes in the architecture of the SuperPoint coding layer model are implemented to reduce redundant information, ensuring high efficiency and low power consumption during localization for the SLAM system.
2. System Overview
2.1. Analysis of Factors Influencing SLAM in Extraterrestrial Environments
- (1)
- The difficulty of feature extraction in unstructured and poorly lit space scenes results in low SLAM localization accuracy.
- (2)
- In unstructured and poorly lit space scenes, low feature matching accuracy results in diminished robustness of SLAM localization.
- (3)
- In harsh space environments, efficient and energy-saving SLAM algorithms are crucial for effective navigation.
2.2. Algorithm Introduction
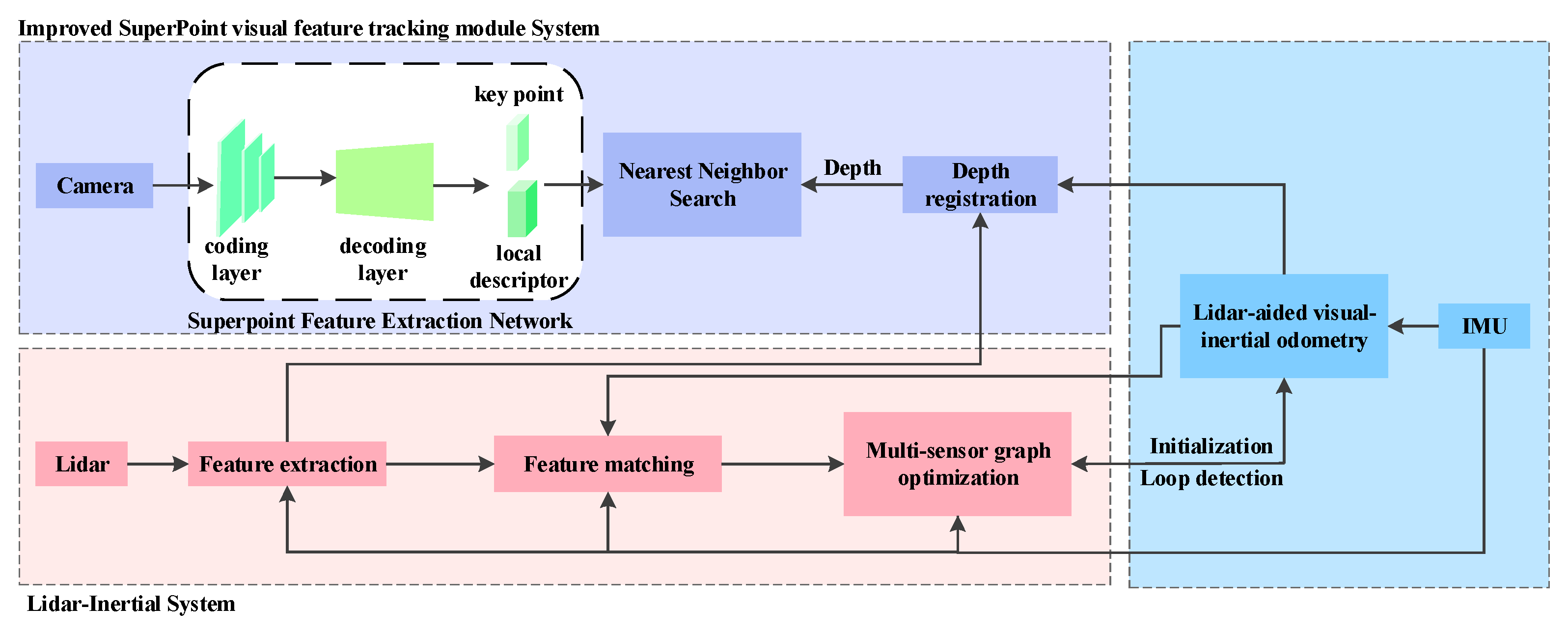
2.2.1. The Improved LVI-SAM Overall Framework
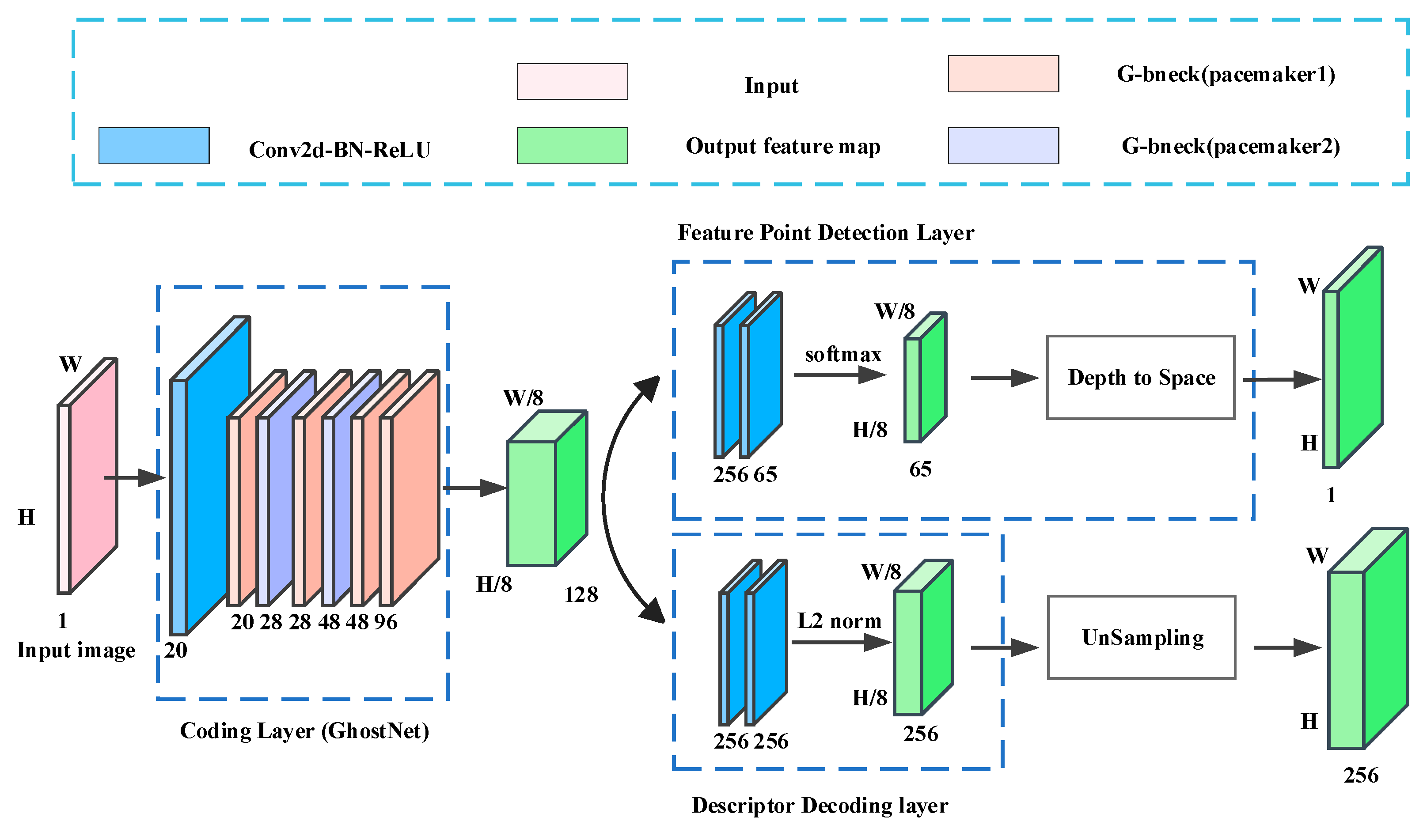
2.2.2. Improved SuperPoint Visual Feature Tracking Module
- Coding Layer;
- 2.
- Feature Point Detection Layer;
- 3.
- Descriptor Decoding Layer.
2.2.3. Construct the Loss Function
- Feature Detector Loss
- 2.
- Sparse Descriptor Loss
2.2.4. Pre-Training
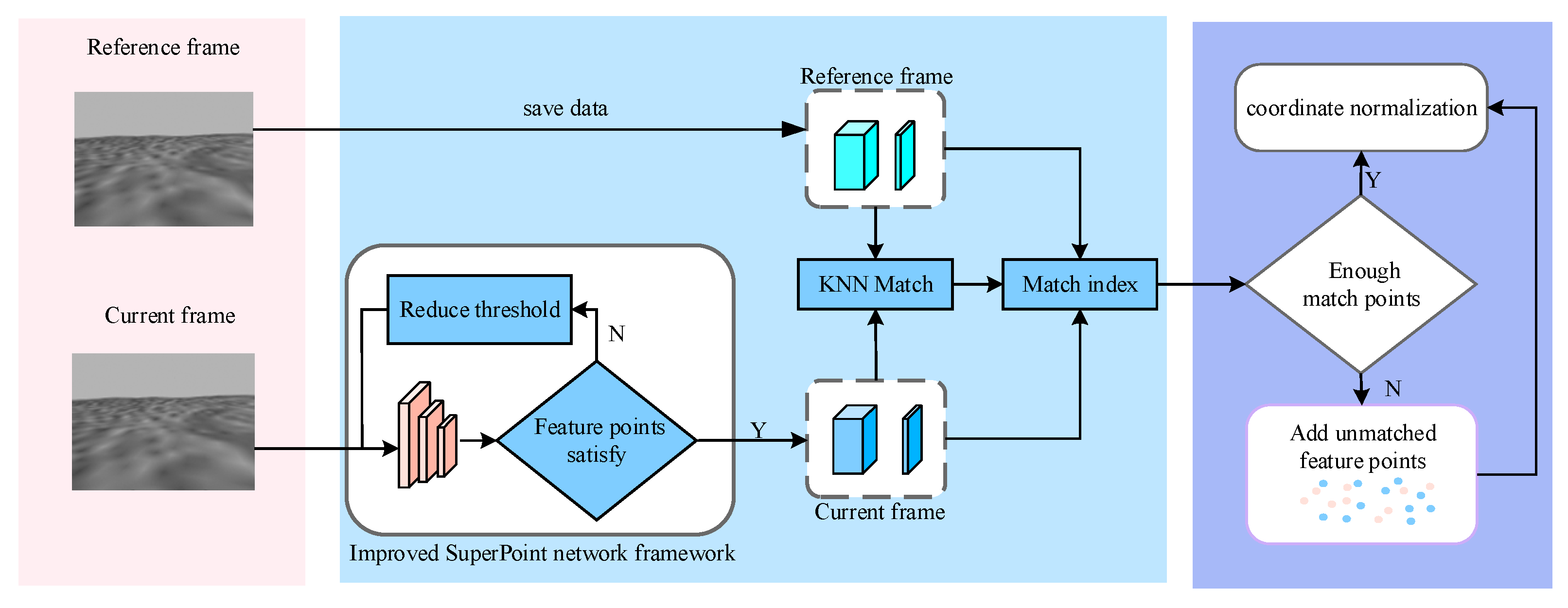
2.3. Fusion of Improved SuperPoint Network and LVI-SAM Visual–Inertial System
3. Results
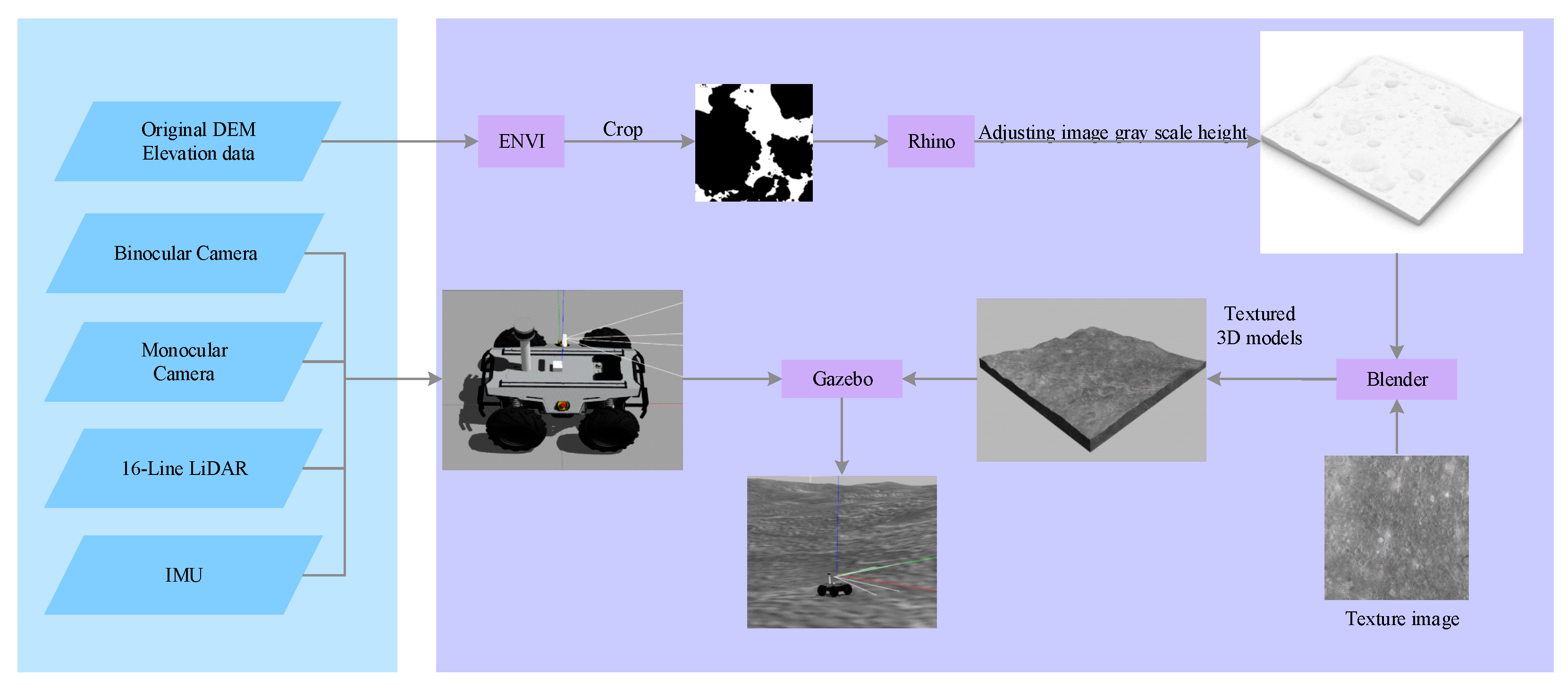
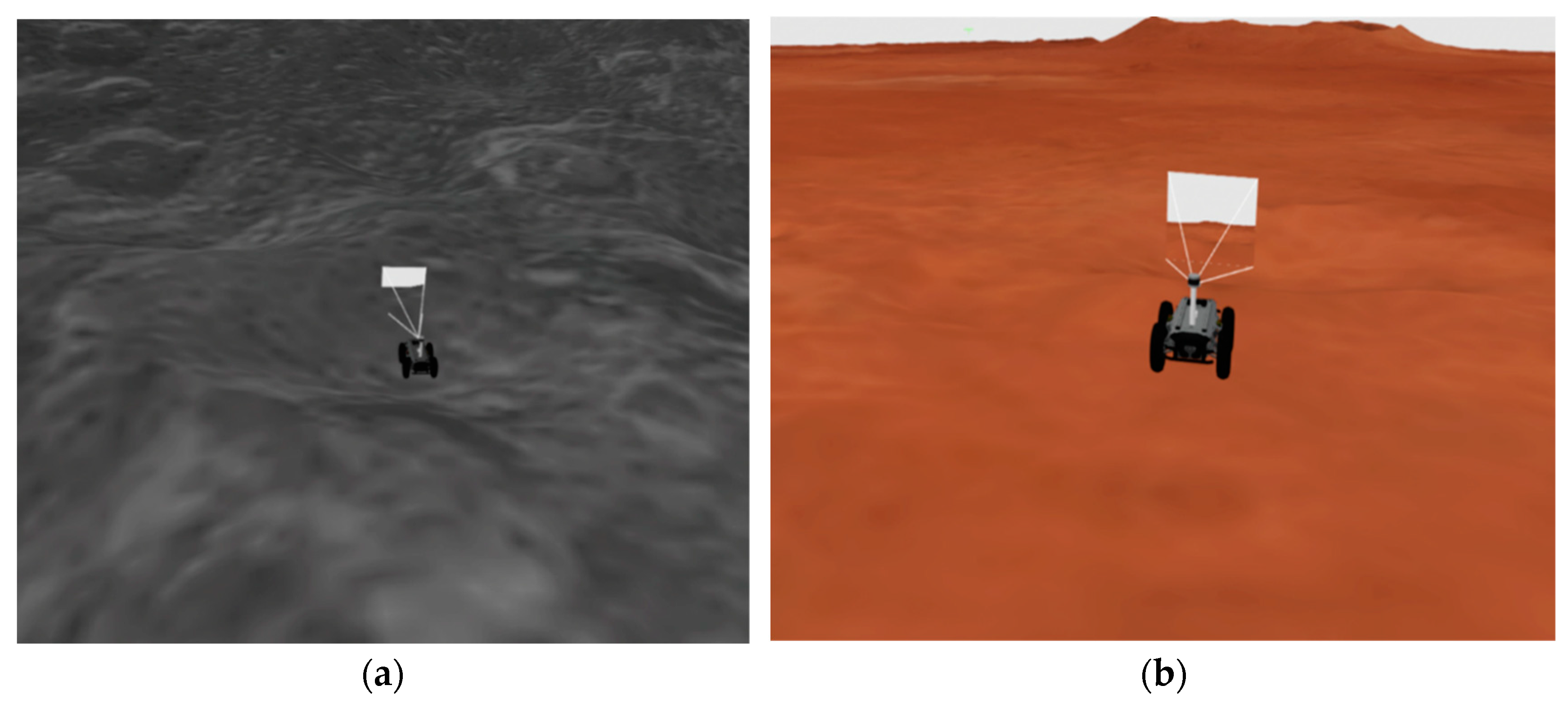
3.1. Simulation Environment Setup
- (1)
- Initially, the elevation data should be imported into ENVI software for cropping. Crop the elevation map to 2500 × 2500 pixels to prevent complications associated with loading massive elevation datasets.
- (2)
- Import the cropped elevation data into Rhino software to adjust the grayscale height of the image and export it to the DAE format for the three-dimensional model. Rhino software converts the grayscale values from the original elevation map into height values in the three-dimensional model.
- (3)
- Import the DAE 3D model into Blender software, apply texture maps, and export the textured DAE 3D model. This step facilitates the more effective simulation of texture information on the surface of extraterrestrial bodies.
- (4)
- A URDF (Unified Robot Description Format) model was constructed, comprising wheels, chassis, transmission system, control module, monocular camera, binocular camera, 16-line LiDAR (Light Detection and Ranging), and Inertial Measurement Unit (IMU).
- (1)
- scout_gazebo: This package contains the Unified Robot Description Format (URDF) file, world files, and configurations for the simulated rover. The URDF file is used to describe the rover’s physical structure, including links, joints, etc.
- (2)
- xacro: This is a ROS package for handling XML macros (XACRO). It allows you to write reusable rover descriptions, making URDF files more concise and modular.
- (3)
- gazebo_ros: This is an interface software package between the Gazebo simulation environment and ROS. It allows you to load and run ROS simulated rovers in Gazebo.
- (4)
- spawn_model: This is a node in the gazebo_ros package used to load simulated rover models into the Gazebo simulation environment. It retrieves the rover’s URDF description from the robot_description parameter on the parameter server and loads it into Gazebo.
- (5)
- joint_state_publisher and robot_state_publisher: These two nodes are used to publish the robot’s joint states and the complete rover state for visualization in tools such as RViz.
- (6)
- rviz: This is the executable file for RViz, used to visualize data from ROS topics.
- (7)
- libgazebo_ros_camera.so: A plugin for simulating camera sensors.
- (8)
- libgazebo_ros_depth_camera.so: A plugin for simulating depth camera sensors.
- (9)
- libgazebo_ros_imu.so: A plugin for simulating IMU sensors.
- (10)
- libgazebo_ros_laser.so: A plugin for simulating laser sensors.
- (11)
- libgazebo_ros_multicamera.so: A plugin for simulating multicamera sensors.
- (12)
- libgazebo_ros_control.so: A plugin that provides control capabilities for interacting with the Gazebo simulation environment.
- (13)
- libgazebo_ros_diff_drive.so: A plugin for simulating differential drive robots.
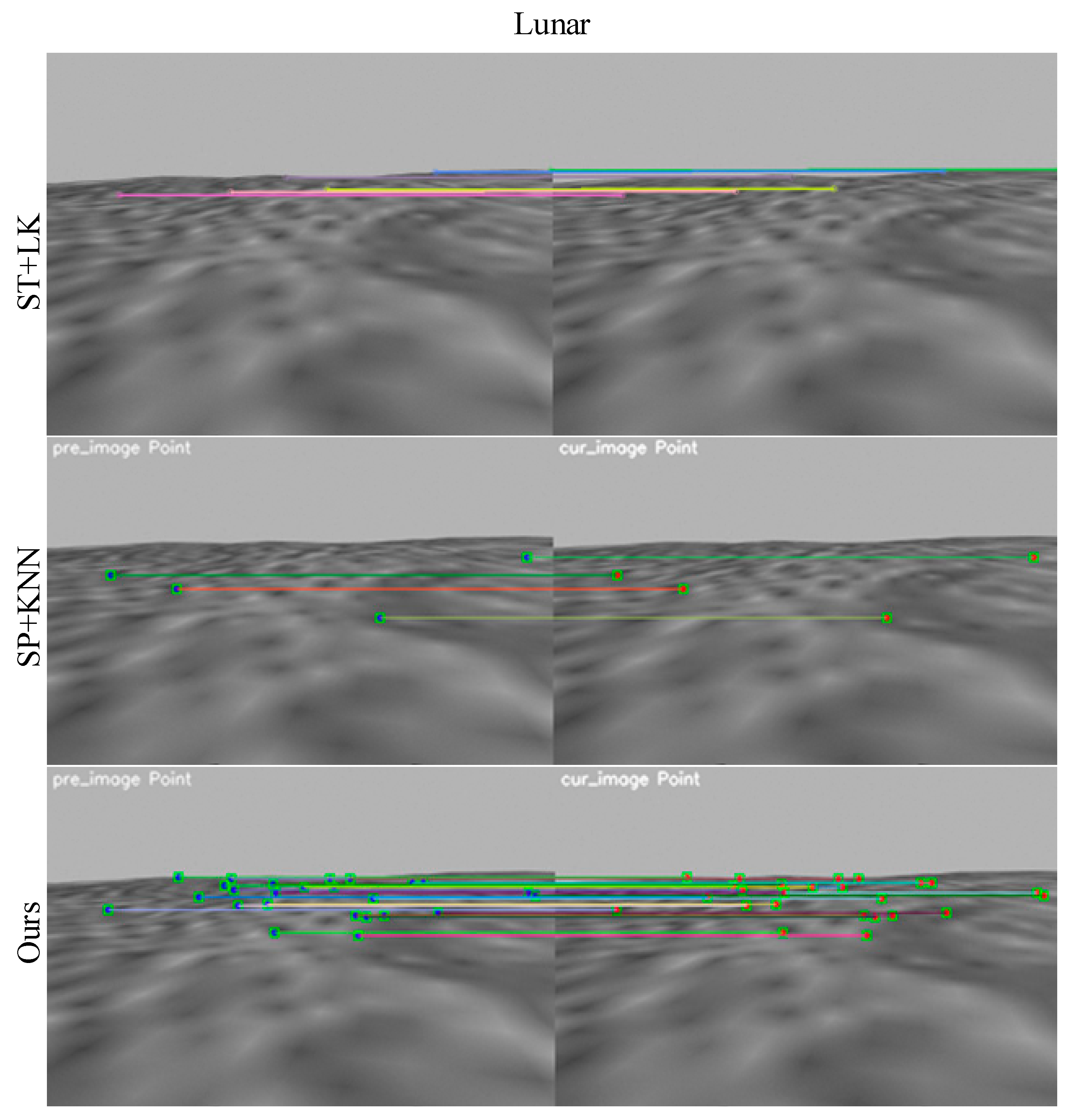
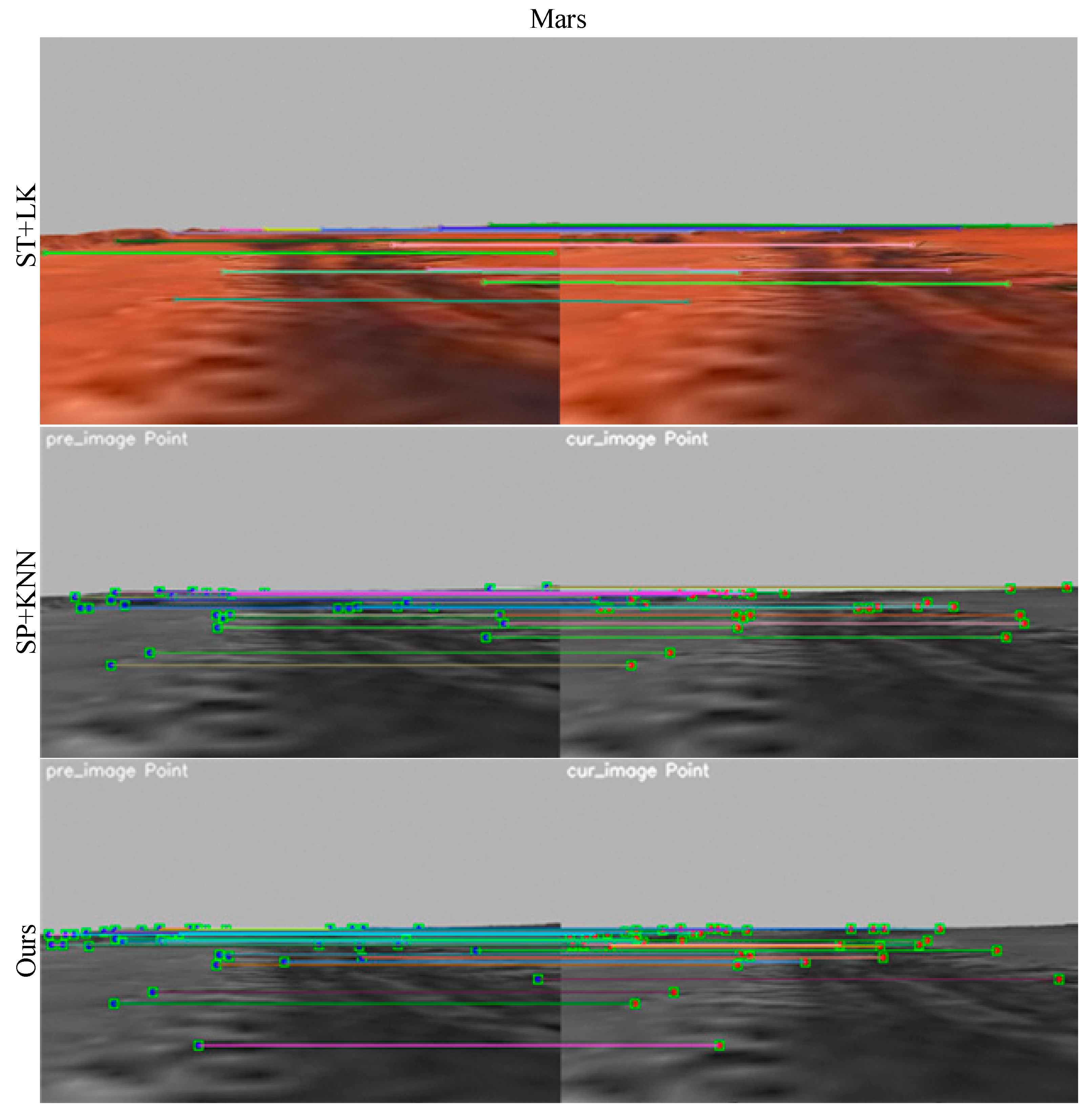
3.2. Visual Feature Extraction and Matching Comparative Experiment
3.2.1. Experimental Data and Algorithms
- (1)
- ST + LK represents Shi-Tomasi + LK, the visual tracking method initially employed by the LVI-SAM system.
- (2)
- SP + KNN represents the deep learning method SuperPoint combined with K-Nearest Neighbor.
- (3)
- Our method represents an improved version of SuperPoint based on the GhostNet encoding layer combined with K-Nearest Neighbor.
3.2.2. Experimental Analysis
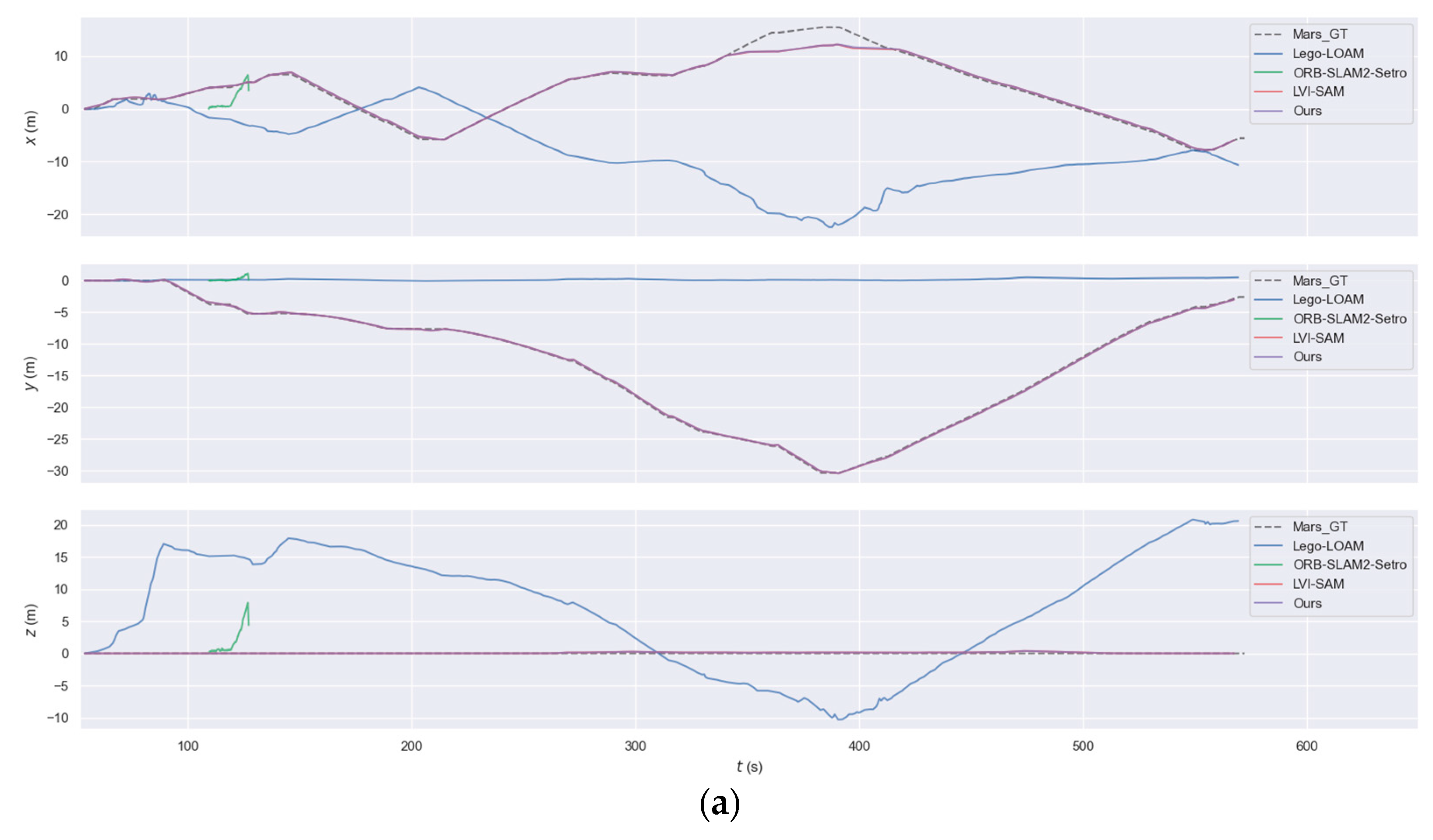
3.3. Simulation-Based SLAM Comparative Experiment
3.3.1. Experimental Data and Algorithms
3.3.2. Experiment Analysis
4. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Qin, T.; Peiliang, L.; Shaojie, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Li, Q.; Queralta, J.P.; Gia, T.N.; Zou, Z.; Westerlund, T. Multi-Sensor Fusion for Navigation and Mapping in Autonomous Vehicles: Accurate Localization in Urban Environments. Unmanned Syst. 2020, 8, 229–237. [Google Scholar] [CrossRef]
- Shamwell, E.J.; Leung, S.; Nothwang, W.D. Vision-aided absolute trajectory estimation using an unsupervised deep network with online error correction. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Shan, T.; Englot, B. LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Kang, H.; An, J.; Lee, J. IMU-Vision based Localization Algorithm for Lunar Rover. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019. [Google Scholar]
- Hou, Y.; Wang, G.C. Research on Mars Surface Image Visual Feature Extraction Algorithm. In Proceedings of the 2013 3rd International Conference on Advanced Materials and Engineering Materials 2013 (ICAMEM 2013), Singapore, 14–15 December 2013. [Google Scholar]
- Cao, F.; Wang, R. Study on Stereo Matching Algorithm for Lunar Rover Based on Multi-feature. In Proceedings of the 2010 International Conference on Innovative Computing and Communication and 2010 Asia-Pacific Conference on Information Technology and Ocean Engineering, Macau, China, 30–31 January 2010. [Google Scholar]
- Lin, J.; Zheng, C.; Xu, W.; Zhang, F. R2 LIVE: A Robust, Real-time, LiDAR-Inertial-Visual tightly-coupled state Estimator and mapping. IEEE Robot. Autom. Lett. 2021, 6, 7469–7476. [Google Scholar] [CrossRef]
- Zuo, X.; Yang, Y.; Geneva, P.; Lv, J.; Liu, Y.; Huang, G.; Pollefeys, M. LIC-Fusion 2.0: LiDAR-Inertial-Camera Odometry with Sliding-Window Plane-Feature Tracking. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021. [Google Scholar]
- Guan, W.; Wang, K. Autonomous Collision Avoidance of Unmanned Surface Vehicles Based on Improved A-Star and Dynamic Window Approach Algorithms. IEEE Intell. Transp. Syst. Mag. 2023, 15, 36–50. [Google Scholar] [CrossRef]
- Alamri, S.; Alamri, H.; Alshehri, W.; Alshehri, S.; Alaklabi, A.; Alhmiedat, T. An Autonomous Maze-Solving Robotic System Based on an Enhanced Wall-Follower Approach. Machines 2023, 11, 249. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. Visual-lidar odometry and mapping: Low-drift, robust, and fast. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Wang, Z.; Zhang, J.; Chen, S.; Yuan, C.; Zhang, J.; Zhang, J. Robust High Accuracy Visual-Inertial-Laser SLAM System. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Shan, T.; Englot, B.; Ratti, C.; Rus, D. LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Gao, X.; Zhang, T. Unsupervised learning to detect loops using deep neural networks for visual SLAM system. Auton. Robot. 2017, 41, 1–18. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, W.; An, P. A Survey of Simultaneous Localization and Mapping on Unstructured Lunar Complex Environment. J. Zhengzhou Univ. (Eng. Sci.) 2018, 39, 45–50. [Google Scholar]
- Li, R.; Wang, S.; Gu, D. DeepSLAM: A Robust Monocular SLAM System with Unsupervised Deep Learning. IEEE Trans. Ind. Electron. 2020, 68, 3577–3587. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, C. Semantic slam for mobile robots in dynamic environments based on visual camera sensors. Meas. Sci. Technol. 2023, 34, 085202. [Google Scholar] [CrossRef]
- Wang, J.; Shim, V.A.; Yan, R.; Tang, H.; Sun, F. Automatic Object Searching and Behavior Learning for Mobile Robots in Unstructured Environment by Deep Belief Networks. IEEE Trans. Cogn. Dev. Syst. 2018, 11, 395–404. [Google Scholar] [CrossRef]
- Baheti, B.; Innani, S.; Gajre, S.; Talbar, S. Eff-UNet: A Novel Architecture for Semantic Segmentation in Unstructured Environment. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Clark, R.; Wang, S.; Wen, H.; Markham, A.; Trigoni, N. Vinet: Visual-inertial odometry as a sequence-to-sequence learning problem. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence (AAAI-17), San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Han, L.; Lin, Y.; Du, G.; Lian, S. Deepvio: Self-supervised deep learning of monocular visual inertial odometry using 3D geometric constraints. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Alqobali, R.; Alshmrani, M.; Alnasser, R.; Rashidi, A.; Alhmiedat, T.; Alia, O.M. A Survey on Robot Semantic Navigation Systems for Indoor Environments. Appl. Sci. 2023, 14, 89. [Google Scholar] [CrossRef]
- Rublee ERabaud VKonolige, K.; Bradski, G.R. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011. [Google Scholar]
- Shi, J.; Tomasi, C. Good Features to Track. In Proceedings of the IEEE Conference on Computer Vision & Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; Volume 600. [Google Scholar]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999. [Google Scholar]
- Tang, J.; Folkesson, J.; Jensfelt, P. Geometric correspondence network for camera motion estimation. IEEE Robot. Autom. Lett. 2018, 3, 1010–1017. [Google Scholar] [CrossRef]
- Tang, J.; Ericson, L.; Folkesson, J.; Jensfelt, P. Gcnv2: Efficient correspondence prediction for real-time slam. IEEE Robot. Autom. Lett. 2019, 4, 3505–3512. [Google Scholar] [CrossRef]
- DeTone, D.; Malisiewicz, T.; Rabinovich, A. SuperPoint: Self-Supervised Interest Point Detection and Description. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Heiken, G.; Vaniman, D.; French, B.M. (Eds.) Lunar Sourcebook—A User’s Guide to the Moon; Cambridge University Press: Cambridge, UK, 1991. [Google Scholar]
- Murchie, S.; Arvidson, R.; Bedini, P.; Beisser, K.; Bibring, J.; Bishop, J.; Boldt, J.; Cavender, P.; Choo, T.; Clancy, R.T.; et al. Compact Reconnaissance Imaging Spectrometer for Mars (CRISM) on Mars Reconnaissance Orbiter (MRO). J. Geophys. Res. Atmos. 2007, 112, E05S03. [Google Scholar] [CrossRef]
- Gonzalez, M.; Marchand, E.; Kacete, A.; Royan, J. S3LAM: Structured Scene SLAM. arXiv 2021, arXiv:2109.07339. [Google Scholar]
- Shao, W.; Vijayarangan, S.; Li, C.; Kantor, G. Stereo Visual Inertial LiDAR Simultaneous Localization and Mapping. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Han, K.; Wang, Y.; Tian, Q.; Guo, J.; Xu, C.; Xu, C. GhostNet: More Features from Cheap Operations. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Jau, Y.Y.; Zhu, R.; Su, H.; Chandraker, M. Deep keypoint-based camera pose estimation with geometric constraints. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021. [Google Scholar]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P. Microsoft COCO: Common Objects in Context. In Computer Vision—ECCV 2014. (ECCV 2014). Lecture Notes in Computer Science; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer: Cham, Switzerland, 2014; Volume 8693. [Google Scholar]
- Ma, X.; Chen, M.; Hu, T.; Kang, Z.; Xiao, M. Study on the Degradation Pattern of Impact Crater Populations in Yutu-2’s Rovering Area. Remote Sens. 2024, 16, 2356. [Google Scholar] [CrossRef]
- Chekakta, Z.; Zenati, A.; Aouf, N.; Dubois-Matra, O. Robust deep learning LiDAR-based pose estimation for autonomous space landers. Acta Astronaut. 2022, 201, 59–74. [Google Scholar] [CrossRef]
- Catanoso, D.; Chakrabarty, A.; Fugate, J.; Naal, U.; Welsh, T.M.; Edwards, L.J. OceanWATERS Lander Robotic Arm Operation. In Proceedings of the 2021 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2021. [Google Scholar]
- Ji, J.; Huang, X. Tianwen-1 releasing first colored global map of Mars. Chin. Sci. Phys. Mech. Astron. 2023, 66, 289533. [Google Scholar] [CrossRef]
- Keetha, N.; Karhade, J.; Jatavallabhula, K.M.; Yang, G.; Scherer, S.; Ramanan, D.; Luiten, J. SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 17–21 June 2024. [Google Scholar]
- Yugay, V.; Li, Y.; Gevers, T.; Oswald, M.R. Gaussian-SLAM: Photo-realistic Dense SLAM with Gaussian Splatting. arXiv 2023, arXiv:2312.10070. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plant | Evaluation Indicators | ST + LK | SP + KNN | Ours |
|---|---|---|---|---|
| Lunar | Extract feature numbers | 7 | 4 | 25 |
| Correct matching numbers | 6 | 4 | 25 | |
| Correct matching rate (%) | 85.7% | 100% | 100% | |
| Mismatch numbers | 1 | 0 | 0 | |
| Mismatching rate (%) | 14.3% | 0% | 0% | |
| runtime(s) | 0.022 | 0.362 | 0.292 | |
| Mars | Extract feature numbers | 14 | 30 | 38 |
| Correct matching numbers | 8 | 30 | 38 | |
| Correct matching rate (%) | 57.1% | 100% | 100% | |
| Mismatch numbers | 6 | 0 | 0 | |
| Mismatching rate (%) | 42.9% | 0% | 0% | |
| runtime(s) | 0.027 | 18.978 | 0.296 |
| Plant | Evaluation Indicators | Lego-LOAM | ORB-SLAM2 | LVI-SAM | Ours |
|---|---|---|---|---|---|
| Lunar | Rmse (m) | 18.892 | 3.381 | 3.883 | 3.164 |
| Mean (m) | 17.281 | 2.953 | 3.617 | 2.894 | |
| Accuracy Improvement Value (m) | / | / | / | 0.723 | |
| Percentage increase in accuracy (%) | / | / | / | 20% | |
| Mars | rmse (m) | 5.274 | 2.426 | 1.003 | 0.965 |
| mean (m) | 4.178 | 2.030 | 0.770 | 0.716 | |
| Accuracy Improvement Value (m) | / | / | / | 0.054 | |
| Percentage increase in accuracy (%) | / | / | / | 7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Cheng, Y.; Bu, L.; Ye, J. Rapid SLAM Method for Star Surface Rover in Unstructured Space Environments. Aerospace 2024, 11, 768. https://doi.org/10.3390/aerospace11090768
Zhang Z, Cheng Y, Bu L, Ye J. Rapid SLAM Method for Star Surface Rover in Unstructured Space Environments. Aerospace. 2024; 11(9):768. https://doi.org/10.3390/aerospace11090768
Chicago/Turabian StyleZhang, Zhengpeng, Yan Cheng, Lijing Bu, and Jiayan Ye. 2024. "Rapid SLAM Method for Star Surface Rover in Unstructured Space Environments" Aerospace 11, no. 9: 768. https://doi.org/10.3390/aerospace11090768
APA StyleZhang, Z., Cheng, Y., Bu, L., & Ye, J. (2024). Rapid SLAM Method for Star Surface Rover in Unstructured Space Environments. Aerospace, 11(9), 768. https://doi.org/10.3390/aerospace11090768