3.1. System Model
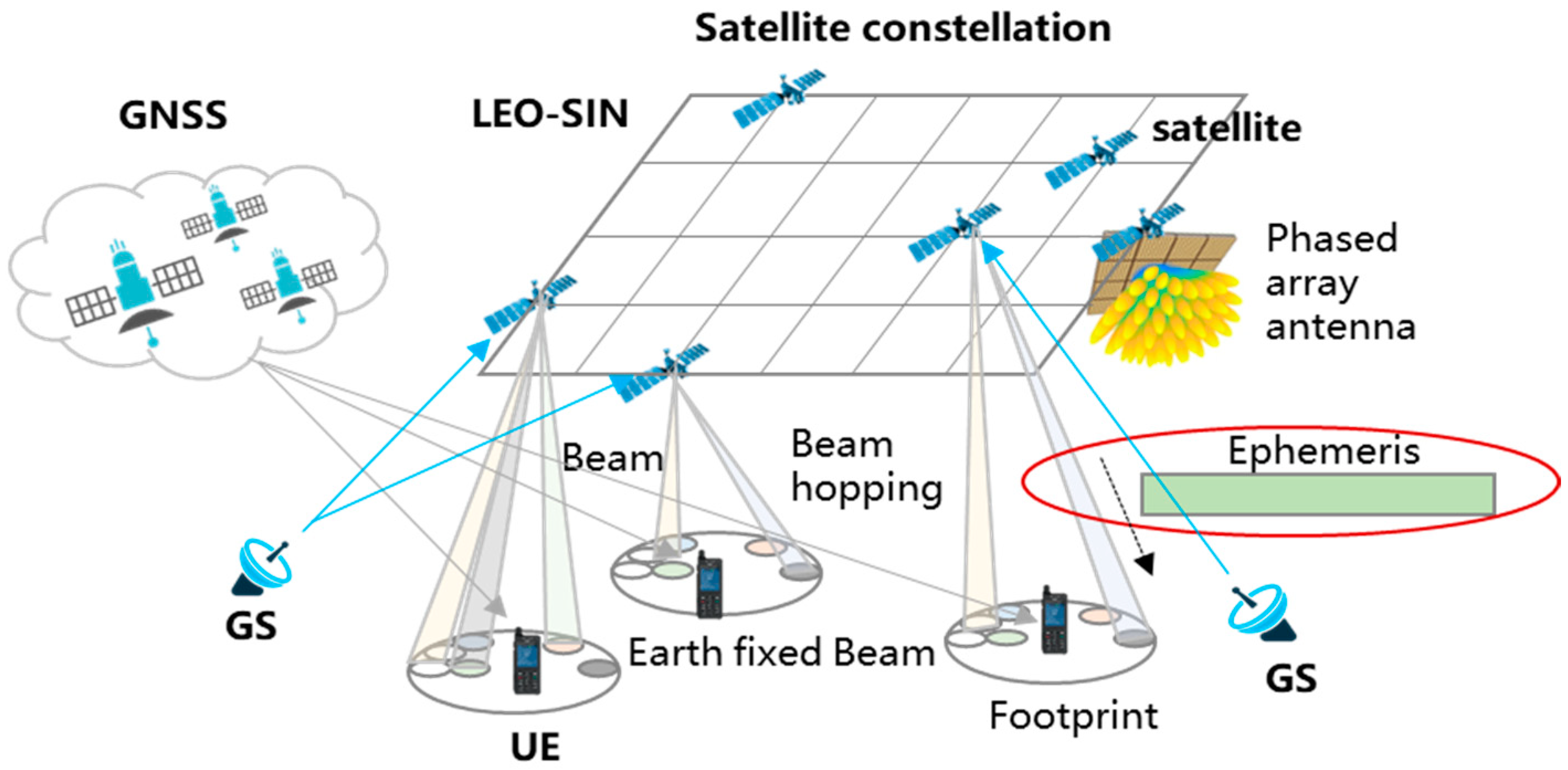
In the LEO-SIN, UEs receive ephemeris information not only from the current serving satellite at an observed time, but also from all visible satellites within the UE’s line-of-sight (LOS) coverage at that moment and some previous moments, as shown in
Figure 2. The following information can support orbit extrapolation performance enhancement: the ephemeris for the same satellite at different times, the ephemeris for adjacent satellites at the same time, and the correlation between the broadcast ephemeris and relatively accurate ephemeris for the same satellite. The analysis and use of this information is expected to further improve the ephemeris extrapolation errors.
We assume a three-parameter set
to define a Walker constellation, where
is the total number of satellites in the constellation,
is the number of orbital planes, and
is the phase factor, which is an integer ranging from 0 to
. The phase difference
between satellites with the same number in different orbital planes is determined by the phase factor
and can be expressed as
The phase difference between satellites with the same number in the
and 0th orbital planes is given by
For a given orbital altitude, the orbital inclination, the initial position of the seed satellite, and the three-parameter set uniquely determines a Walker constellation.
In this work, a series of related satellites within the UE’s LOS coverage will be analyzed. These satellites form a group of satellites, which consists of satellites with the same orbit or adjacent orbits within the same constellation. Each satellite periodically broadcasts its ephemeris in TLE format to the UEs, while the GSs periodically send measured and calculated accurate ephemeris data to the satellites.
Figure 3 illustrates the scenario of satellite monitoring, ephemeris calculation, and broadcasting.
We assume that a UE is considered in the satellite footprint, which can simultaneously receive ephemeris information from multiple different satellites. Orbit extrapolation with different satellites’ ephemerides exhibits different levels of accuracy. At a given time , the corresponding ephemeris can be denoted as , where denotes the UE LOS area, which is typically the region covered by the satellite signals. Here, , where is the number of beam footprints of the serving satellite and represents the beam footprint. is the set of times at which TLE data are received in region , defined as . is the set of correlated satellites, which is defined as .
The set of ephemeris data
received by the UE at position
at time
is given by
where
K is the number of correlated satellites and
represents the ephemeris data of satellite
K received by the UE in this service area at the time
.
The proposed method, aimed at multi-satellite ephemeris extrapolation, can effectively improve the extrapolation accuracy.
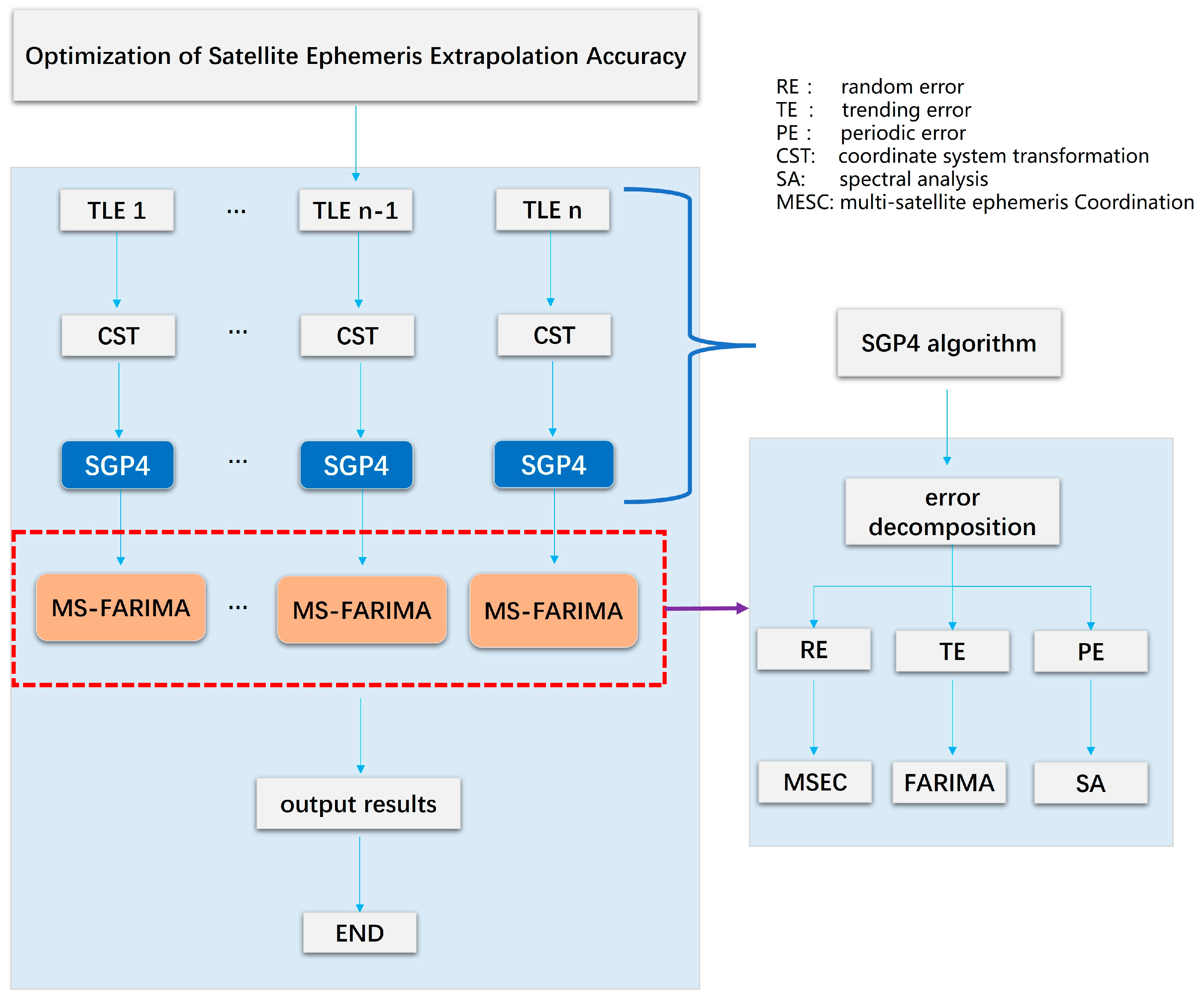
Figure 3 shows the flowchart of the proposed method.
The left side of the flowchart represents the overall process of optimizing the satellite’s ephemeris extrapolation accuracy. The right side provides a detailed description of the proposed MS-FARIMA algorithm, including error decomposition and the specific methods used to eliminate each type of error.
3.2. Problem Formulation
3.2.1. TLE Data
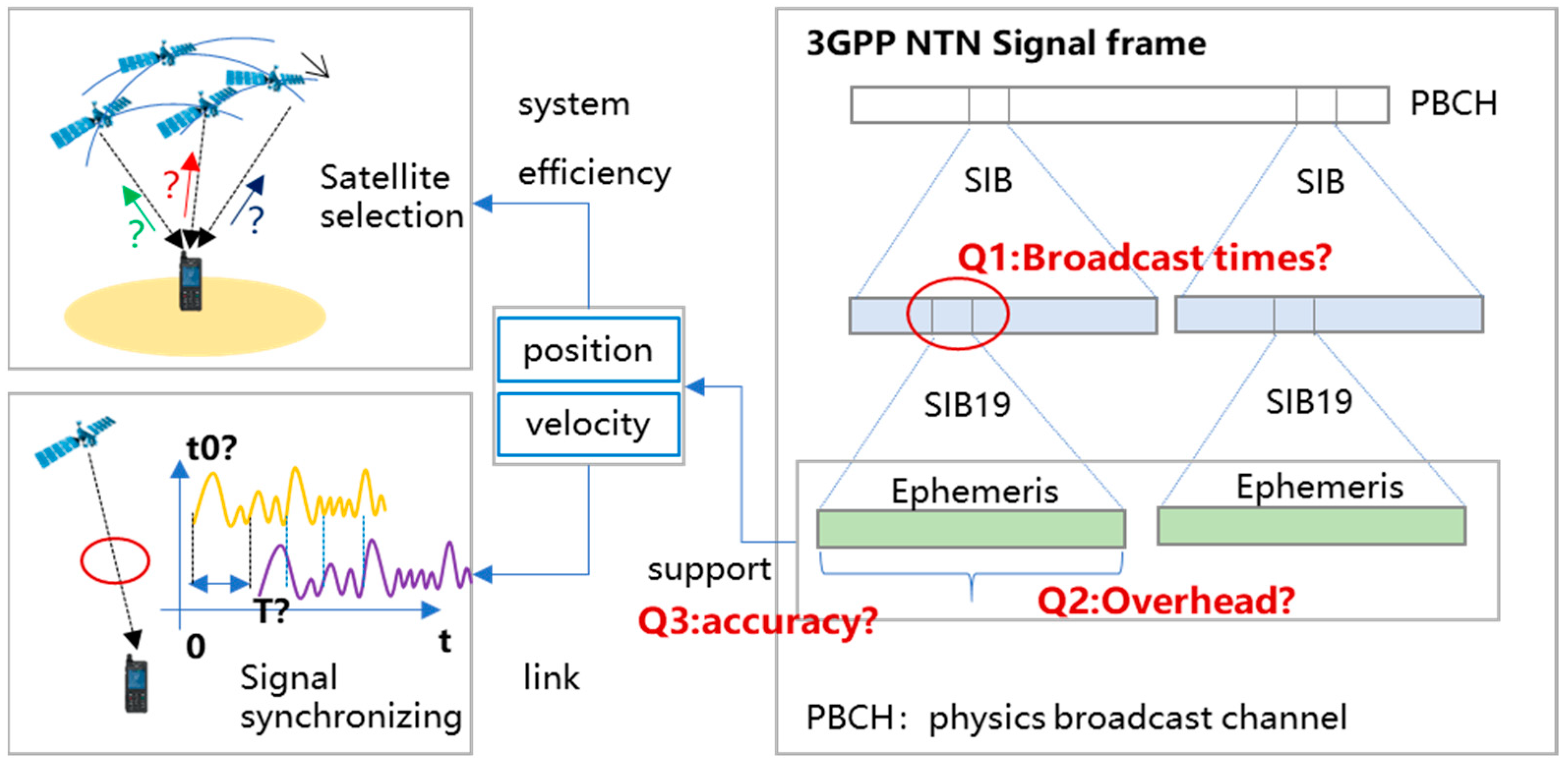
According to the recommendations of the third generation Partnership Project Non-Terrestrial Network (3GPP NTN), the two types of satellite ephemeris consist of SKOE data and data on the position and velocity. SKOE data are more widely exploited, particularly in the TLE format in system information block 19 (SIB19) [
21,
22]. SKOE data include the mean motion
, mean inclination
, mean eccentricity
, mean anomaly
, argument of periapsis
, and the mean longitude of the ascending node
.
The TLE of the SKOEs describes the characteristics of the satellite’s ephemeris in the form of two lines with 70 columns each. The first line records basic information such as the satellite’s name and launch time. The second line records the parameters of the satellite’s operational orbit, which play the main role in orbit extrapolation. The details of the second line of the TLE table are shown in
Table 1.
As
Table 1 shows, the TLE data reflect the mean orbital parameters using the true equator and mean equinox (TEME) expression, filtering out short-term perturbations.
Figure 4 illustrates the parameters of the TLE data. The SGP4 algorithm uses the TLE data to calculate the SKOEs to the position
r and velocity
of the satellite in the TEME coordinate system [
23,
24]. Here, the TLE ephemeris in the TEME coordinate system should convert the Earth-centered Earth-fixed (ECEF) coordinate system into X, Y, and Z coordinates as a function of time. The conversion formulas are as follows:
where
is the rotation matrix used to convert the position vector from the TEME coordinate system to the ECEF coordinate system.
denotes the rotation matrix around the z-axis,
denotes the Earth’s rotation angle due to the change in time, and
represents the cosine of the angle between the equatorial plane and the ecliptic plane.
3.2.2. Error Analysis of Orbit Extrapolation Based on Ephemeris
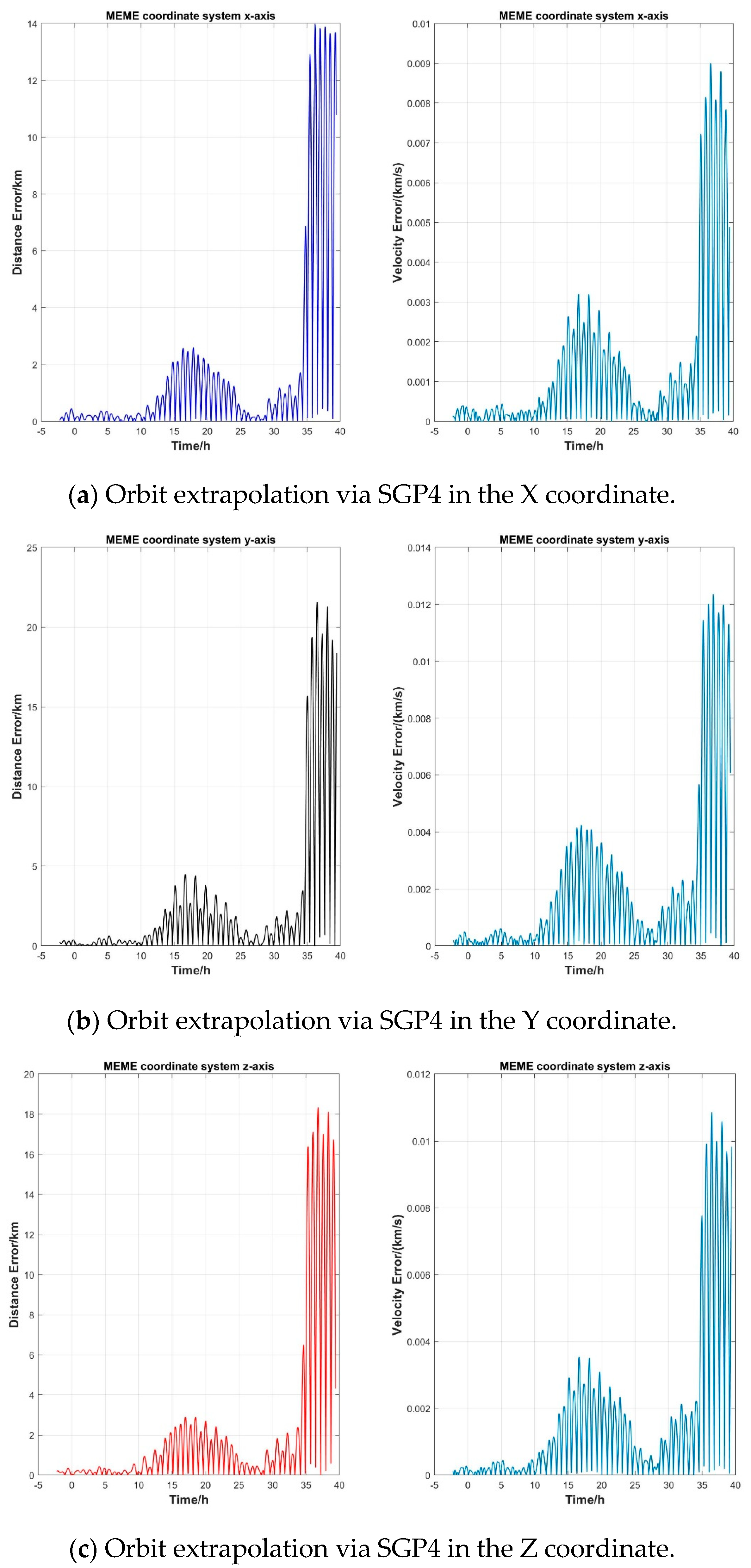
In the MPDTSC system, satellites’ ephemeris data are periodically broadcast to the UE in TLE format. The expected SGP4 model extrapolates the orbit to calculate the satellite’s location and velocity, with certain errors being caused by the Earth’s gravitational effects, the gravitational effects of other celestial bodies, satellite attitude deviations, and ephemeris transmission errors [
25]. This error can be decomposed into three directional components in the spatial Cartesian coordinate system.
Radial component R: the direction along the line connecting the satellite and the Earth’s center;
Along-track component A: the tangential component within the orbital plane, perpendicular to the radial direction and pointing in the direction of the satellite’s motion;
Cross-track component C: the component perpendicular to the orbital plane.
The broadcast ephemeris information received by the UE is denoted as
, and is in the form of TLE orbital elements:
Based on the referenced time
and the orbital elements in the TLE ephemeris data, the SGP4 algorithm is used to extrapolate the following three-dimensional coordinate components of the position vector
r:
where
,
,
are the spatial position calculation functions of the satellite, which are the three-dimensional coordinate components of the position
r calculated using the SGP4 algorithm.
denotes the position at time
t. The satellite’s broadcast ephemeris can be expressed as the sum of the real position and real velocity of the ephemeris
and the ephemeris error
:
Unlike previous works that treat the orbit extrapolation error as a single error, we assume that there are multiple types of orbit extrapolation errors with different influencing factors.
where
denotes a set of orbit extrapolation errors with different influencing factors and
represents the
n-th influencing factor.
3.2.3. Extrapolation Error of Single-Satellite Ephemeris
To analyze the lower bound of the orbit extrapolation error based on single-satellite ephemeris information, the observed function
is defined. It denotes the operation of a time-series data process, consisting of the computation of a self-correlation with sliding window
for any interval [0,
] sequentially. The results are a set of data
, which is
where
represents the
n-th group of data in the interval [0,
]. We separate the broadcast ephemeris extrapolation errors into three types: the RE, TE, and PE.
The RE consists of unpredictable noise in the ephemeris data due to various external and internal factors, such as satellite hardware limitations, signal interference, and environmental conditions. These errors do not follow a specific pattern and vary randomly over time. The TE arises due to the accumulation of systematic biases in the ephemeris data over time. These errors are usually caused by deficiencies in the satellite dynamics model, including gravitational influences and orbital perturbations, and they accumulate gradually as the satellite’s orbit continues. The PE is caused by the periodic nature of the satellite’s motion around the Earth. These errors are usually caused by the gravitational effects of celestial bodies, the oblateness of the Earth, and other periodic factors.
If the following conditions are met within
this set of data time series can be considered to contain an RE
. Here,
in Equation (10) represents a threshold value.
affects all ephemeris orbit extrapolation errors received by the UE at the current moment.
If the following conditions are met within
this set of data time series can be considered to contain a TE
.
is caused by the characteristics of the SGP4 algorithm, in which ephemeris orbit extrapolation error is inevitable.
If the following conditions are met within
this set of time-series data can be considered to exhibit a PE
.
is caused by the elliptical motion of the satellite around the Earth, where some errors periodically change with the movement of the satellite.
Then, we further separate these errors by defining three types of separation operators
. By orthogonally decomposing the extrapolation error component
with the three operators, the different orbit extrapolation errors can be separated:
In Equation (13), and denote non-zero values.
3.2.4. Extrapolation Error Reduction in Single-Satellite Ephemeris
We simplify the orbit extrapolation error data as
. Based on the previous analysis, since the ephemeris data exhibit certain long-term correlation characteristics, short-term correlation characteristics, and random characteristics, they can be decomposed into the RE component
, PE component
, and the TE component
:
For PE
, due to its periodic characteristics, spectral analysis can be used to extract the PE from the ephemeris error
. First, the fast Fourier transform (FFT) algorithm is used to convert the ephemeris extrapolation error from the time domain to the frequency domain, with the Fourier series expression of
:
where
is the mean value of the extrapolation error over the observation period,
and
are the amplitudes of different PEs of the extrapolation error, and
is the frequency of the corresponding PE. By utilizing the orthogonality of different PEs, it can be derived that
where
represents the sampling period.
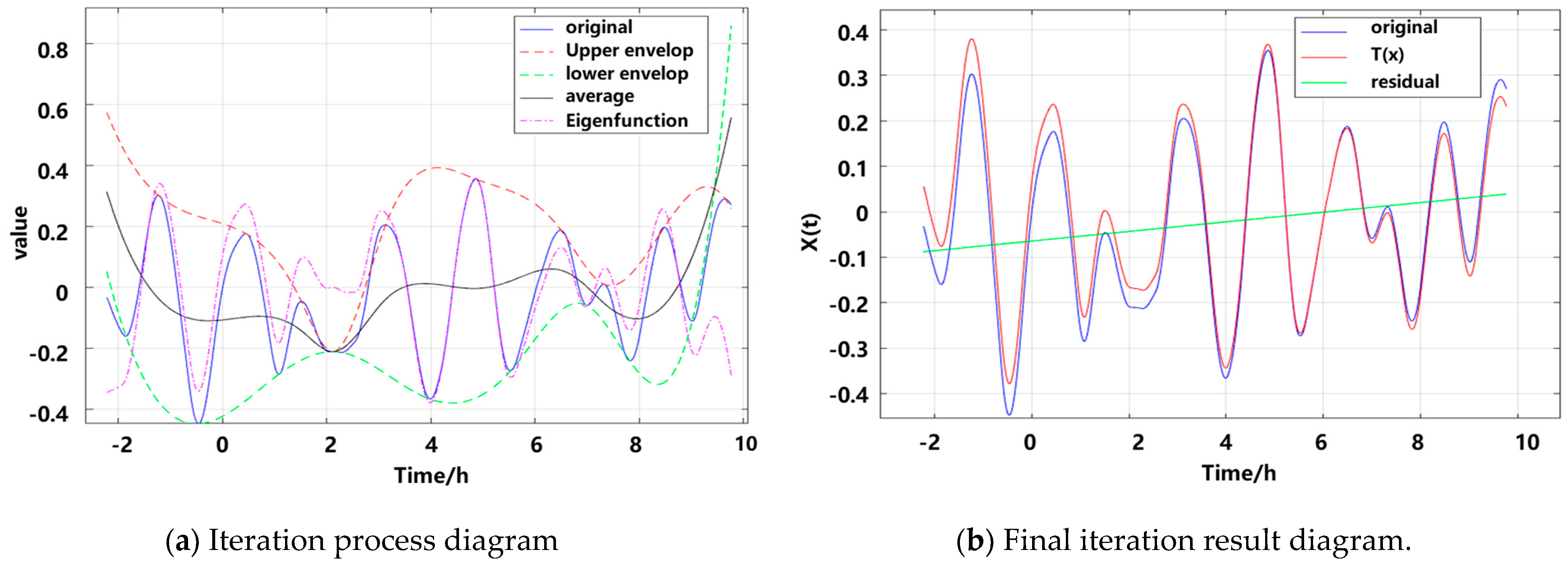
TE is caused by the characteristics of the SGP4 algorithm, which will gradually increase as the extrapolation time increases. Therefore, a TSF algorithm is exploited to learn the characteristics of the part of the data with small errors and predict subsequent data based on these characteristics.
We fit the upper and lower envelopes
and
of
based on all extrema of
and calculate their mean
. Then, we solve the trend characteristic function
. Depending on whether
is an intrinsic function, we iterate on
to obtain the intrinsic function
. Next, we calculate the residual sequence
. We repeat the above steps until
no longer meets the iterative conditions, forming the extracted trend component of
:
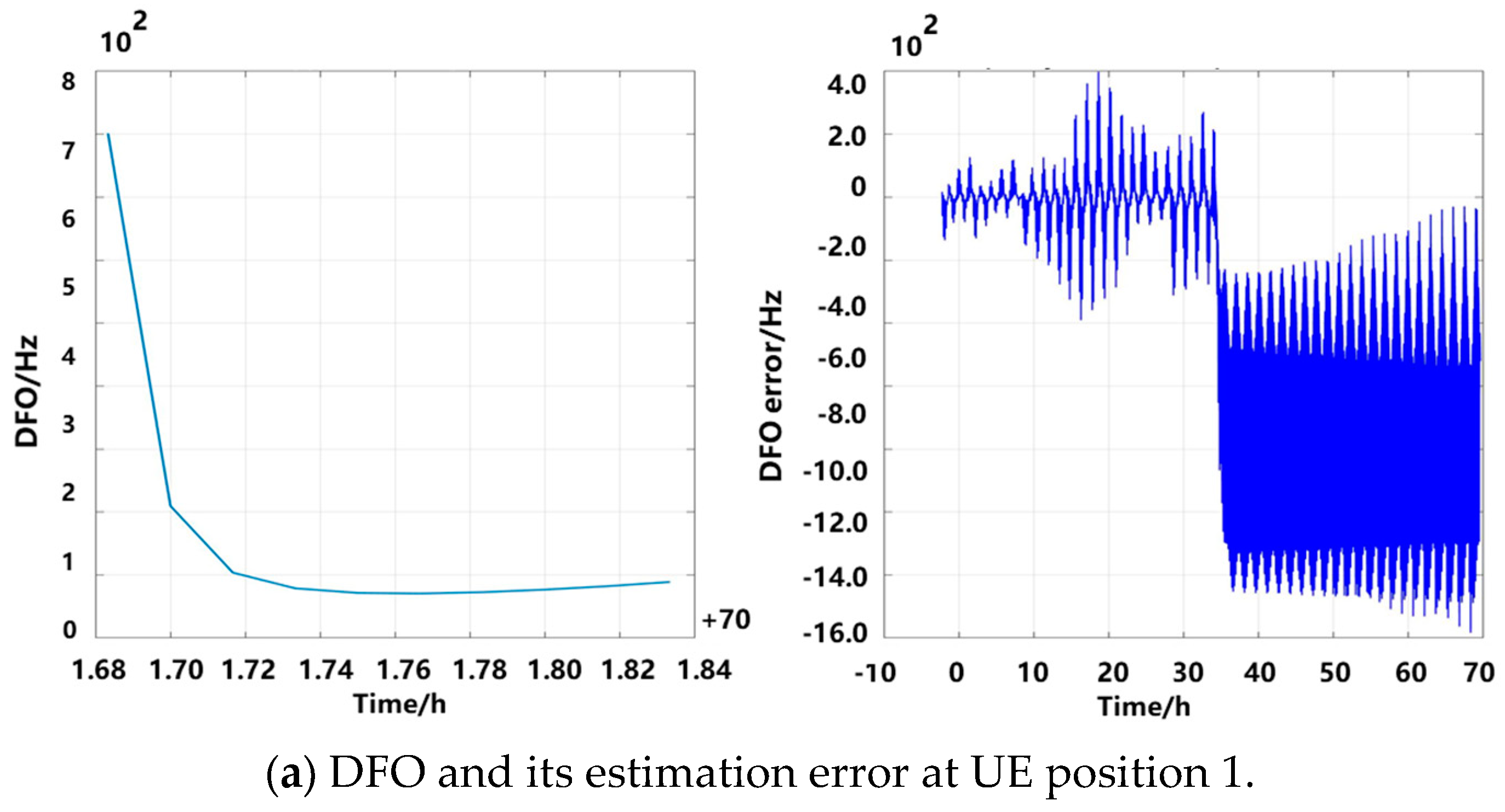
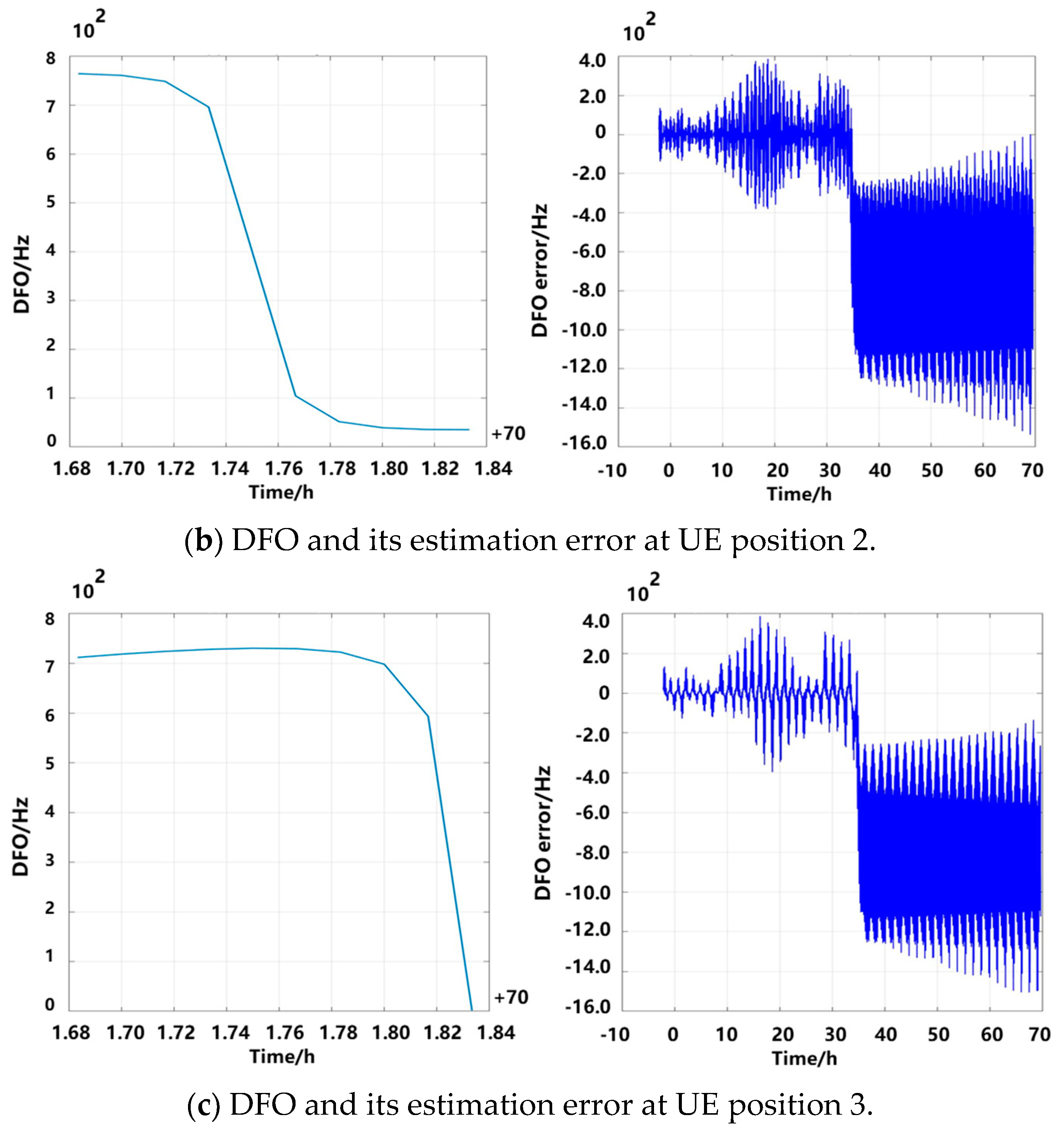
3.2.5. Communication Performance Influenced by Extrapolation Accuracy
High-speed relative motion causes a serious DFO in the LEO-SIN channel. By predicting the satellite’s position and velocity using ephemeris extrapolation algorithms, the DFO can be calculated and compensated for [
26,
27].
The DFO can be calculated using the traditional method as follows:
where
denotes the velocity in the direction of the line connecting
and
. It can be calculated that
where
denotes the satellite’s velocity vector and
represents the cosine of the angle between the satellite and the UE.
According to Equation (4), the satellite’s position and velocity are obtained in the ECEF coordinate system over a given period. Let the position vector of the UE be = , and the position vector of the satellite be = .
Assume that the orthogonal frequency division multiplexing (OFDM) symbols transmitted from the satellite are received at the UE with a DFO
. The received signal
can be expressed as
where
is the transmitted signal,
ranges from 0 to
, and
represents the number of subcarriers in one OFDM symbol.
Applying the FFT to the signal
converting to the frequency-domain signal
,
where
is the frequency-domain signal obtained from the FFT of the transmitted signal
, and
is the inter-carrier interference (ICI) caused by the DFS.
When the signal is affected by a frequency offset, the amplitude of the transmitted signal is reduced and its phase is rotated. When the frequency offset is an integer multiple of the subcarrier spacing, equals zero, indicating that there is no inter-carrier interference. However, when the frequency offset is a fractional multiple of the subcarrier spacing, ICI from other subcarriers occurs.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}