
Spectral Properties of Bistatic Radar Signals Using the Ray Tracing Technique and a Facet Approach



Abstract
1. Introduction
2. Background and Goals
3. Surface Properties from Quasi-Specular Radar Backscatter
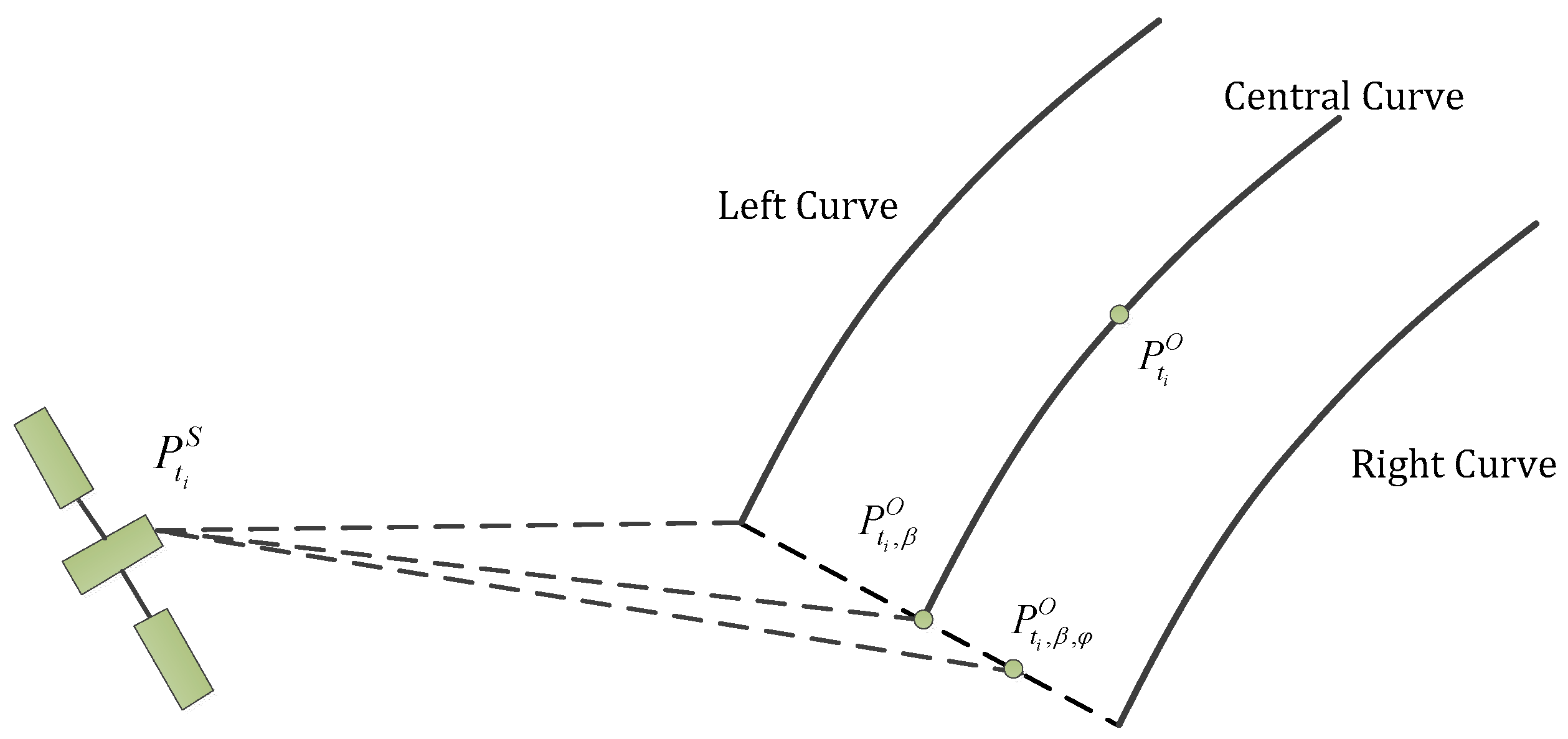
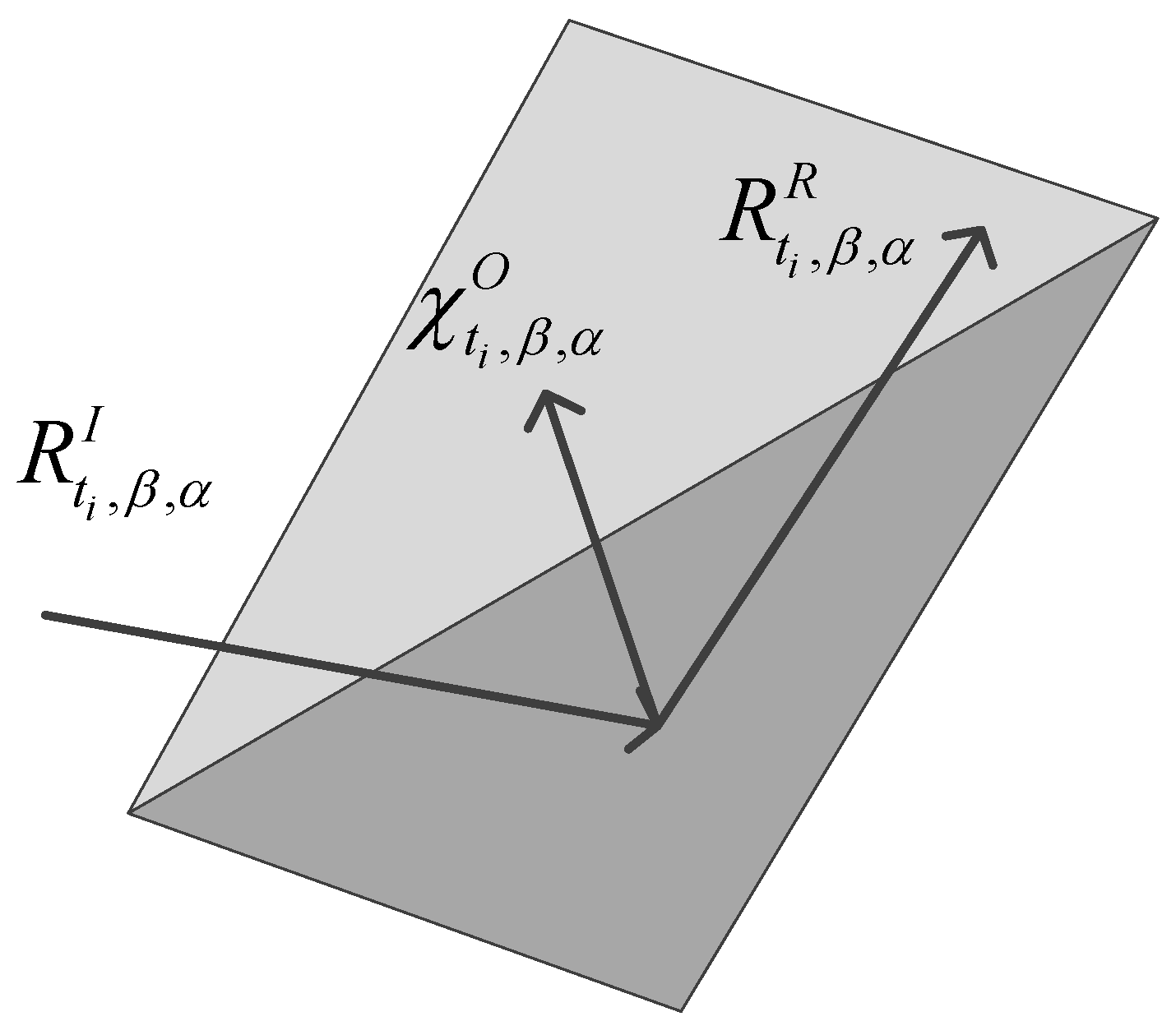
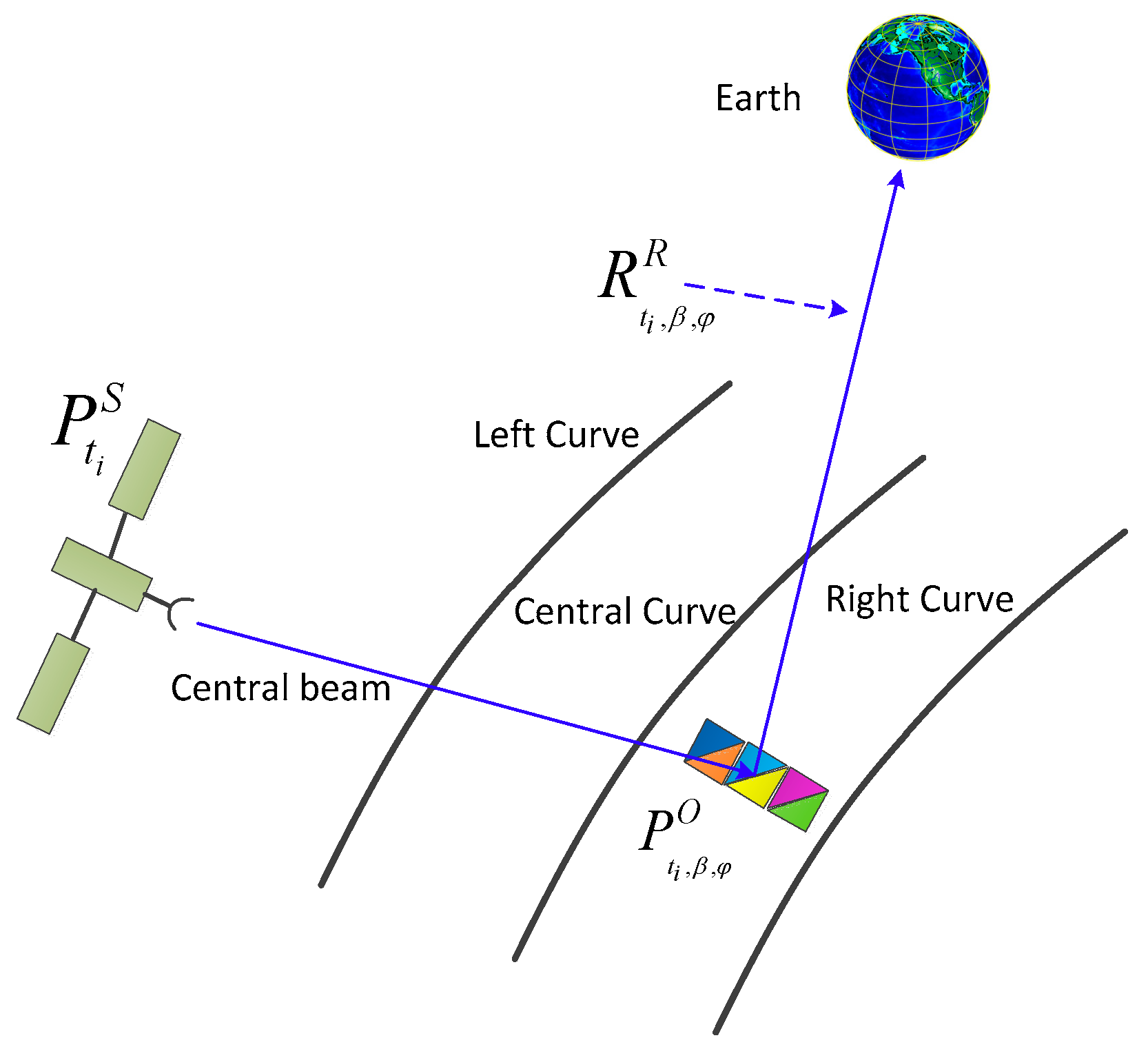
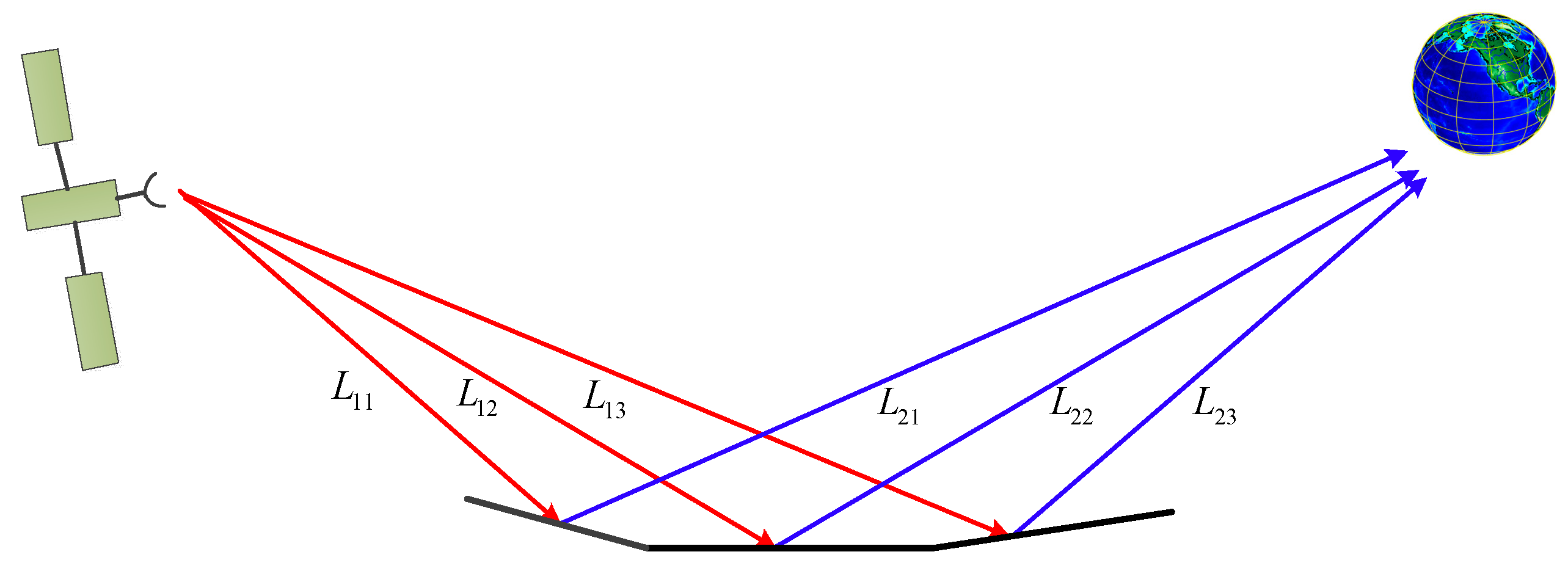
3.1. Simulation of Reflected Signals
3.2. Modeling the Reception of Reflected Signals
3.3. Doppler Shift of the Received Signals
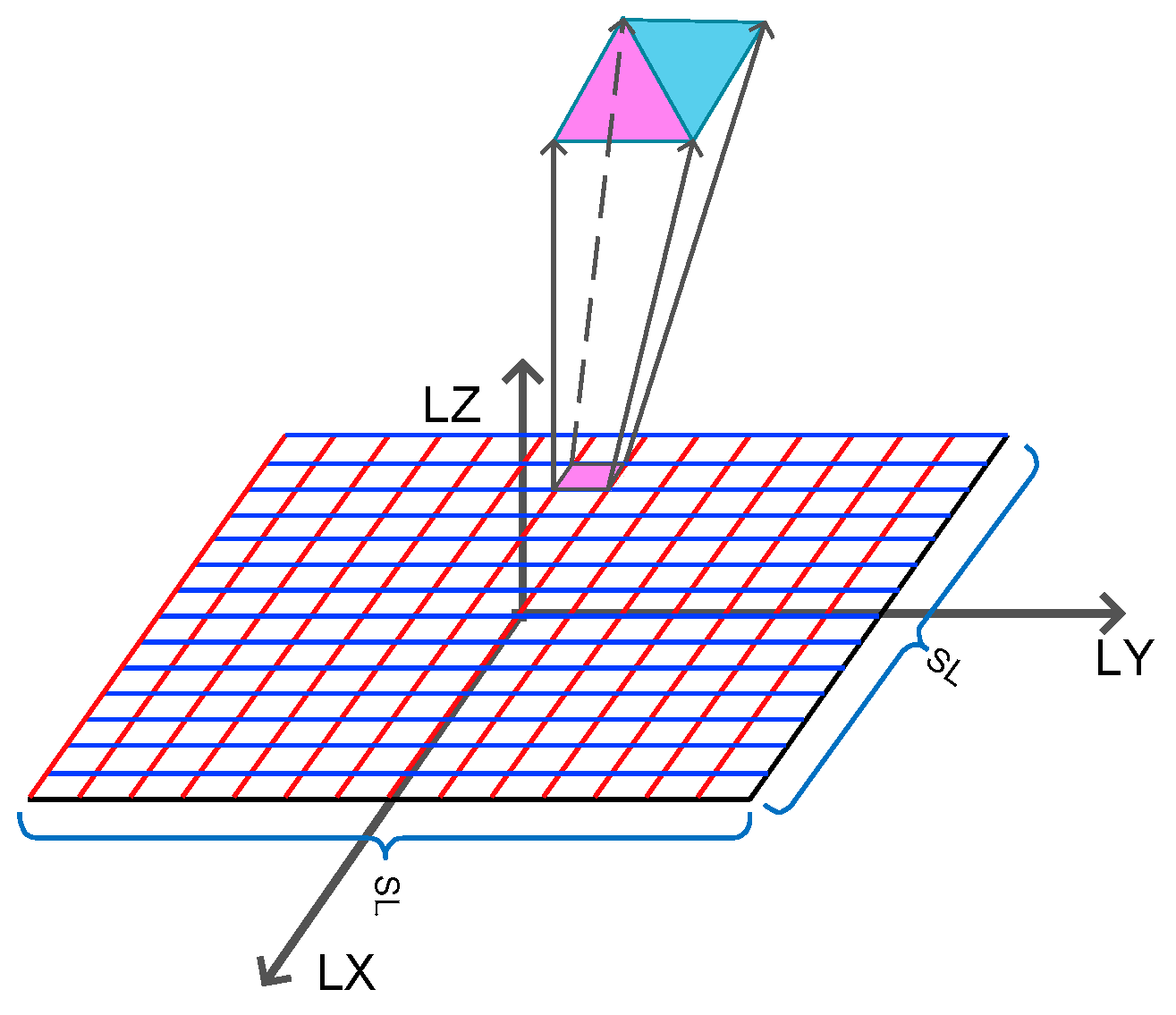
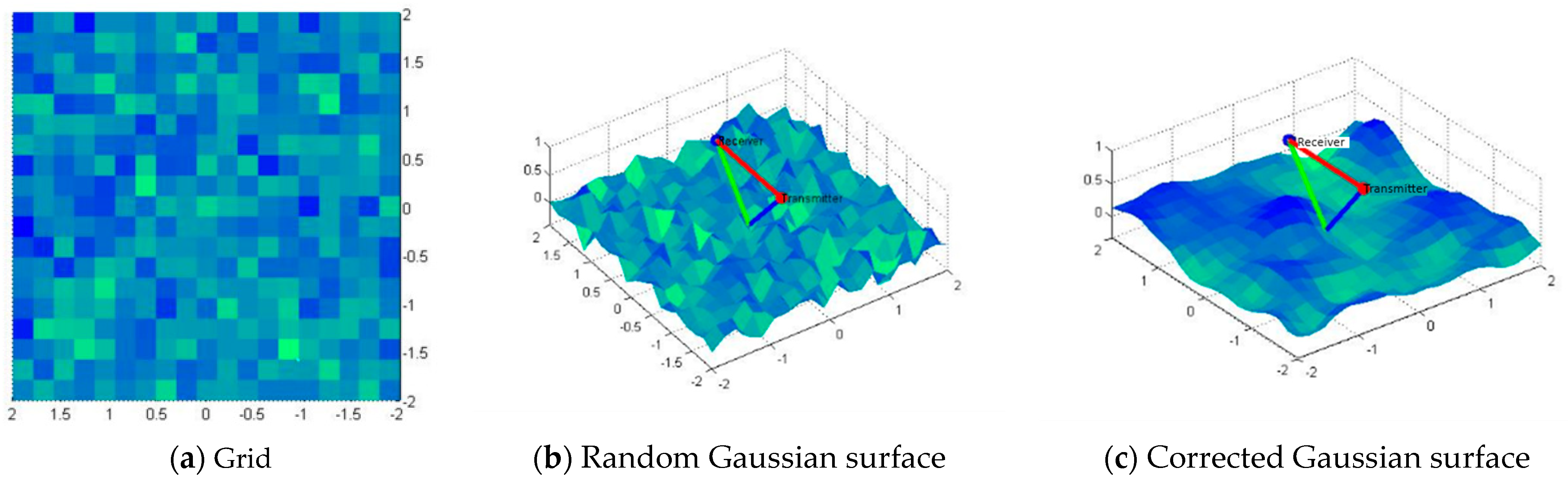
3.4. Computation of the rms Slope
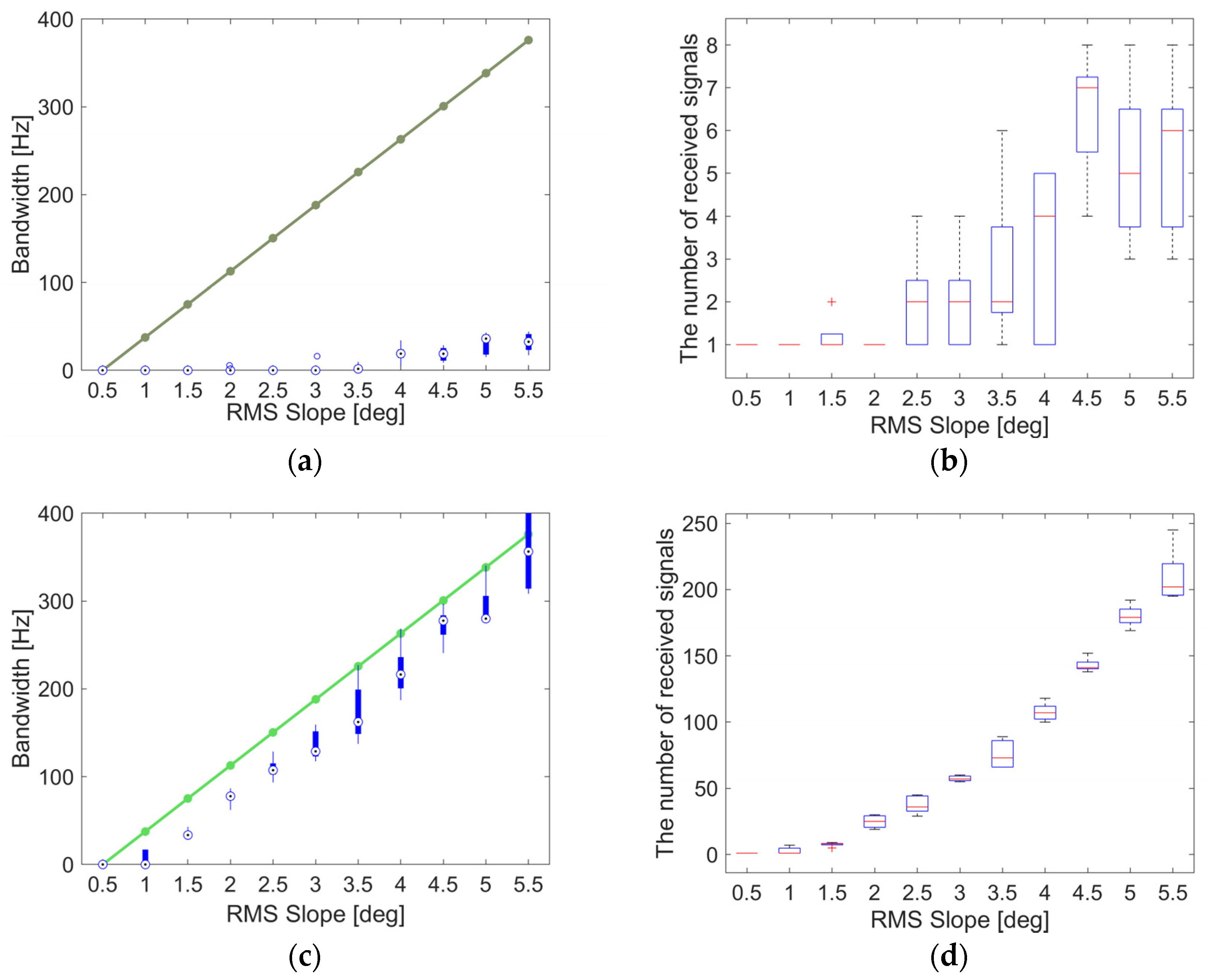
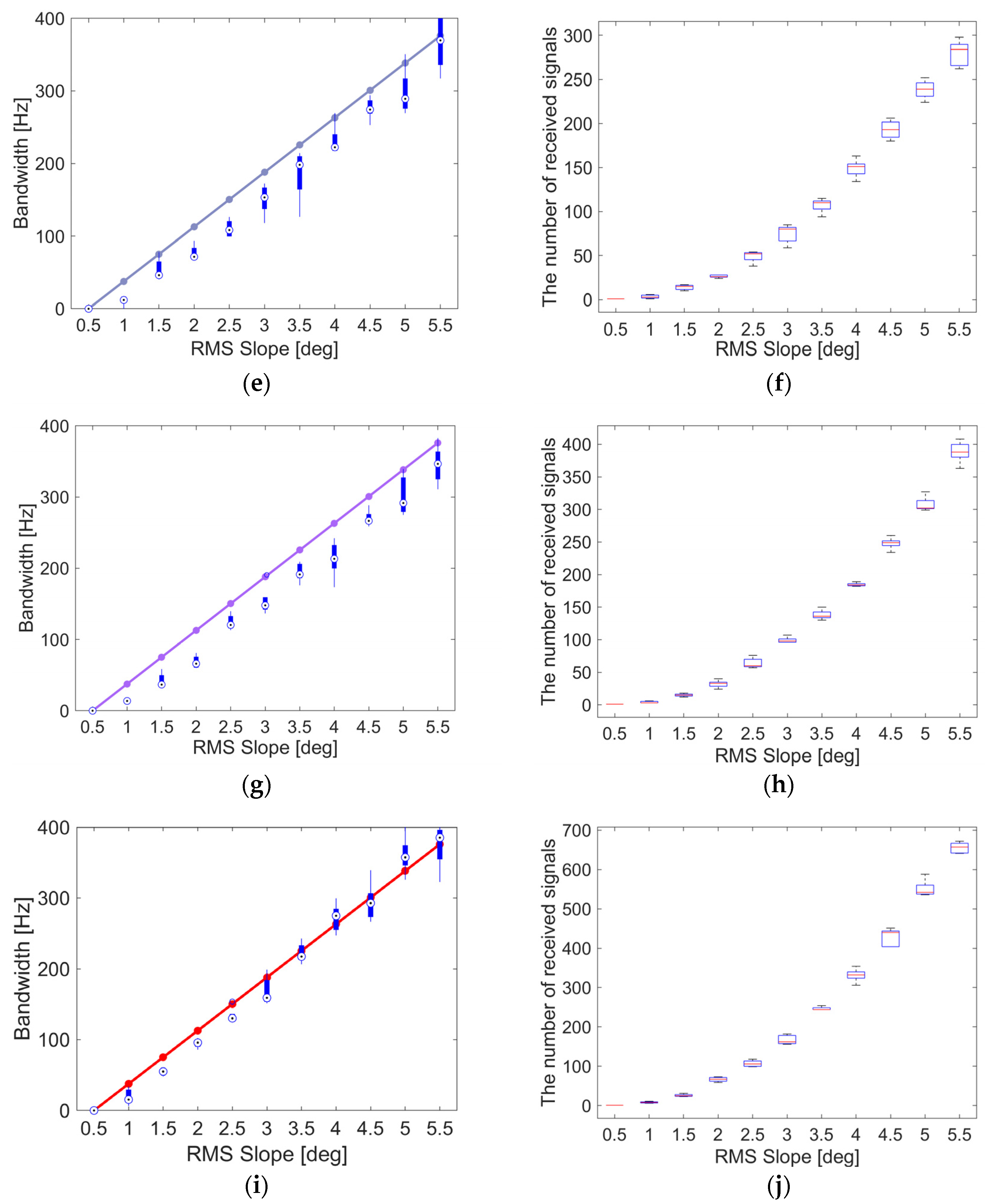
4. Numerical Simulation Experiments
4.1. Case 1: Mars Bistatic Radar Experiments
4.2. Case 2: JUICE
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fjeldbo, G. Bistatic-Radar Methods for Studying Planetary Ionospheres and Surfaces Scientific Report no. 2/Final; No. NASA-CR-62823; Stanford University: Stanford, CA, USA, 1964. [Google Scholar]
- Simpson, R. Spacecraft studies of planetary surfaces using bistatic radar. IEEE Trans. Geosci. Remote. Sens. 1993, 31, 465–482. [Google Scholar] [CrossRef]
- Simpson, R.A.; Tyler, G.L.; Pätzold, M.; Häusler, B. Inference of Electrical and Physical Surface Properties from Mars Express Bistatic Radar. In Proceedings of the Seventh International Conference on Mars, Pasadena, CA, USA, 9–13 July 2007; Volume 1353, p. 3044. [Google Scholar]
- Brozovic, M.; Butler, B.J.; Margot, J.L.; Naidu, S.P.; Lazio, T.J.W. Planetary bistatic radar. arXiv 2018, arXiv:1810.08712. [Google Scholar]
- Campbell, B.A.; Campbell, D.B.; Chandler, J.F.; Hine, A.A.; Nolan, M.C.; Perillat, P.J. Radar imaging of the lunar poles. Nature 2003, 426, 137–138. [Google Scholar] [CrossRef] [PubMed]
- Pérez-Ayúcar, M.; Lorenz, R.D.; Floury, N.; Prieto-Cerdeira, R.; Lebreton, J.P. Bistatic observations of Titan’s surface with the Huygens probe radio signal. J. Geophys. Res. Planets 2006, 111. [Google Scholar] [CrossRef]
- Kofman, W.; Herique, A.; Ciarletti, V.; Lasue, J.; Levasseur-Regourd, A.C.; Zine, S.; Plettemeier, D. The interior of 67P/CG comet as seen by CONSERT bistatic radar on ROSETTA, key results and implications. In Proceedings of the European Planetary Science Congress 2017, Riga, Latvia, 17–22 September 2017; Volume 11, p. EPSC2017-203. [Google Scholar]
- Nozette, S.; Lichtenberg, C.L.; Spudis, P.; Bonner, R.; Ort, W.; Malaret, E.; Robinson, M.; Shoemaker, E.M. The clementine bistatic radar experiment. Science 1996, 274, 1495–1498. [Google Scholar] [CrossRef] [PubMed]
- Lichtenberg, C.L. Bistatic Radar Observations of the Moon Using the Clementine Spacecraft and Deep Space Network; The Johns Hopkins University: Baltimore, MD, USA, 2000. [Google Scholar]
- Head, J.W., III; Peterfreund, A.R.; Garvin, J.B.; Zisk, S.H. Surface characteristics of Venus derived from Pioneer Venus altimetry, roughness, and reflectivity measurements. J. Geophys. Res. Solid Earth 1985, 90, 6873–6885. [Google Scholar] [CrossRef]
- Simpson, R.A.; Tyler, G.L.; Häusler, B.; Mattei, R.; Pätzold, M. Venus Express bistatic radar: High-elevation anomalous reflectivity. J. Geophys. Res. 2009, 114. [Google Scholar] [CrossRef]
- Simpson, R.A.; Tyler, G.L.; Pätzold, M.; Häusler, B. Determination of local surface properties using Mars Express bistatic radar. J. Geophys. Res. 2006, 111. [Google Scholar] [CrossRef]
- Simpson, R.A.; Tyler, G.L.; Patzold, M.; Hausler, B.; Asmar, S.W.; Sultan-Salem, A.K. Polarization in bistatic radar probing of planetary surfaces: Application to mars express data. Proc. IEEE 2011, 99, 858–874. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, Y.; Chen, K.-S. Martian topographic roughness spectra and its influence on bistatic radar scattering. IEEE Geosci. Remote. Sens. Lett. 2020, 18, 1951–1955. [Google Scholar] [CrossRef]
- Brighi, G. Cassini Bistatic Radar Experiments: Preliminary Results on Titan’s Polar Regions. Aerotec. Missili Spaz. 2023, 102, 59–76. [Google Scholar] [CrossRef]
- Poggiali, V.; Brighi, G.; Hayes, A.G.; Nicholson, P.D.; MacKenzie, S.; Lalich, D.E.; Bonnefoy, L.E.; Oudrhiri, K.; Lorenz, R.D.; Soderblom, J.M.; et al. Surface properties of Titan’s seas as revealed by Cassini RSS bistatic radar experiments. Nat. Commun. 2024; in press. [Google Scholar]
- Linscott, I.; Asmar, S.; Bird, M.; DeBoy, C.; Sepan, R.; Stern, A.; Ennico Smith, K. Pluto’s Surface Properties from the New Horizons Uplink Bistatic Radar Experiment. In AGU Fall Meeting Abstracts; American Geophysical Union: Washington DC, USA, 2019; Volume 2019, p. P34A-01. [Google Scholar]
- Palmer, E.M.; Heggy, E.; Kofman, W. Orbital bistatic radar observations of asteroid Vesta by the Dawn mission. Nat. Commun. 2017, 8, 409. [Google Scholar] [CrossRef] [PubMed]
- Pätzold, M.; Häusler, B.; Aksnes, K.; Anderson, J.D.; Asmar, S.W.; Barriot, J.-P.; Bird, M.K.; Boehnhardt, H.; Eidel, W.; Grün, E.; et al. Rosetta Radio Science Investigations (RSI). Space Sci. Rev. 2007, 128, 599–627. [Google Scholar] [CrossRef]
- Peytavi, G.G.; Andert, T.; Paetzold, M.; Häusler, B.; Remus, S.; Tellmann, S.; Bird, M.K.; Asmar, S.W. Processing bistatic radar observations of comet 67P/CG by the RSI experiment aboard Rosetta. In AGU Fall Meeting Abstracts; American Geophysical Union: Washington DC, USA, 2018; Volume 2018, p. P51G-2953. [Google Scholar]
- Brighi, G. Probing the surface of Ganymede by means of bistatic radar with the JUICE mission. Mater. Res. Proc. 2023, 33, 110–117. [Google Scholar]
- Asmar, S.W.; Lazio, J.; Atkinson, D.H.; Bell, D.J.; Border, J.S.; Grudinin, I.S.; Preston, A.J.M.R.A.; Elliott, H. Small spacecraft for planetary atmospheric, surface, and interior structure using radio links. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–8. [Google Scholar]
- Bell, D.J.; Fraeman, A.; Lazio, J.; Nunes, D.C. Opportunistic Bistatic Radar for Mars Helicopter. In AGU Fall Meeting Abstracts; American Geophysical Union: Washington DC, USA, 2018; Volume 2018, p. P51D-2918. [Google Scholar]
- Oudrhiri, K.; Rodriguez-Alvarez, N.; Yang, Y.-M.; Lay, N.E.; Buccino, D.; Shin, D.; Podest, E.; Brockers, R. Bistatic Radar Experiments with UAV: Qualification and Performance of a Miniaturized Instrument. In Proceedings of the 2021 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2021; pp. 1–12. [Google Scholar]
- Balaram, J.; Aung, M.; Golombek, M.P. The Ingenuity Helicopter on the Perseverance Rover. Space Sci. Rev. 2021, 217, 1–11. [Google Scholar] [CrossRef]
- Hagfors, T. Backscattering from an undulating surface with applications to radar returns from the Moon. J. Geophys. Res. 1964, 69, 3779–3784. [Google Scholar] [CrossRef]
- Ogilvy, J.A.; Merklinger, H.M. Theory of Wave Scattering from Random Rough Surfaces; Taylor & Francis: Milton Park, UK, 1991; ISBN 978-0-7503-0063-6. [Google Scholar]
- Simpson, R.; Tyler, G. Radar scattering laws for the lunar surface. IEEE Trans. Antennas Propag. 1982, 30, 438–449. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive. Volume 2-Radar Remote Sensing and Surface Scattering and Emission Theory; NASA Technical Reports Server; NASA: Washington, DC, USA, 1982. [Google Scholar]
- Rees, G. The Remote Sensing Data Book; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Tyler, G.L.; Ingalls, D.H.H. Functional dependences of bistatic-radar frequency spectra and cross sections on surface scattering laws. J. Geophys. Res. 1971, 76, 4775–4785. [Google Scholar] [CrossRef]
- Simpson, R.A. Highly oblique bistatic radar observations using Mars Global Surveyor. In Proceedings of the Lunar and Planetary Science Conference, Houston, TX, USA, 11–15 March 2002; p. 1987. [Google Scholar]
- Gunnarsdottir, H.M.; Linscott, I.R.; Callas, J.L.; Cousins, M.D.; Simpson, R.A.; Tyler, G.L. Root-mean-square surface slopes of Phoenix landing sites with 75-cm bistatic radar received by Mars Odyssey. J. Geophys. Res. Planets 2008, 113. [Google Scholar] [CrossRef]
- Sultan-Salem, A.K.; Leonard Tyler, G. Hagfors’ law revisited. J. Geophys. Res. Planets 2006, 111. [Google Scholar] [CrossRef]
- Tyler, G.L.; Simpson, R.A. Bistatic Radar Measurements of Topographic Variations in Lunar Surface Slopes with Explorer 35. Radio Sci. 1970, 5, 263–271. [Google Scholar] [CrossRef]
- Grasset, O.; Dougherty, M.; Coustenis, A.; Bunce, E.; Erd, C.; Titov, D.; Blanc, M.; Coates, A.; Drossart, P.; Fletcher, L.; et al. JUpiter ICy moons Explorer (JUICE): An ESA mission to orbit Ganymede and to characterise the Jupiter system. Planet. Space Sci. 2015, 78, 1–21. [Google Scholar] [CrossRef]
- Boutonnet, A.; Rocchi, A.; Martens, W. JUICE-Jupiter Icy Moons Explorer Consolidated Report on Mission Analysis (CReMA) v.5; ESA Document JUI-ESOC-MOC-RP-001, Issue 5, Revision 1; ESA: Paris, France, 2022. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| rms H (km) | ζ with 29,387 Grid Points | ζ with 40,000 Grid Points | ζ with 57,600 Grid Points | ζ with 90,000 Grid Points | ζ with 160,000 Grid Points (degrees) | ζ Computed by Equation (3) |
|---|---|---|---|---|---|---|
| 0 | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) |
| 0.02 | 0.11136 (77.12%) | 0.5632 (15.73%) | 0.52963 (8.84%) | 0.49545 (1.81%) | 0.48783 (0.25%) | 0.48663 |
| 0.04 | 0.22181 (77.21%) | 1.1308 (16.19%) | 1.0739 (10.34%) | 0.99048 (1.77%) | 0.97412 (0.09%) | 0.97325 |
| 0.06 | 0.33319 (77.18%) | 1.694 (15.62%) | 1.5954 (9.28%) | 1.4849 (1.71%) | 1.4594 (0.03%) | 1.4599 |
| 0.08 | 0.44457 (77.16%) | 2.2535 (15.77%) | 2.1339 (9.63%) | 1.9785 (1.64%) | 1.9483 (0.09%) | 1.9465 |
| 0.1 | 0.54651 (77.54%) | 2.8279 (16.21%) | 2.6648 (9.51%) | 2.4807 (1.96%) | 2.4376 (0.18%) | 2.4331 |
| 0.12 | 0.66127 (77.35%) | 3.4209 (17.16%) | 3.1748 (8.73%) | 2.9608 (1.40%) | 2.8965 (0.80%) | 2.9198 |
| 0.14 | 0.77938 (77.12%) | 3.9271 (15.29%) | 3.7156 (9.08%) | 3.4624 (1.64%) | 3.4036 (0.08%) | 3.4064 |
| 0.16 | 0.89038 (77.15%) | 4.4841 (15.18%) | 4.2575 (9.36%) | 3.9631 (1.80%) | 3.8912 (0.20%) | 3.893 |
| 0.18 | 1.0112 (76.91%) | 5.0768 (15.92%) | 4.7752 (9.03%) | 4.4374 (1.32%) | 4.3644 (0.35%) | 4.3796 |
| 0.2 | 1.1042 (77.31%) | 5.6252 (15.60%) | 5.3022 (8.96%) | 4.9312 (1.33%) | 4.8398 (0.54%) | 4.8663 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuo, M.; Mitri, R.S.; Gai, I.; Brighi, G.; Tortora, P. Spectral Properties of Bistatic Radar Signals Using the Ray Tracing Technique and a Facet Approach. Aerospace 2024, 11, 615. https://doi.org/10.3390/aerospace11080615
Zuo M, Mitri RS, Gai I, Brighi G, Tortora P. Spectral Properties of Bistatic Radar Signals Using the Ray Tracing Technique and a Facet Approach. Aerospace. 2024; 11(8):615. https://doi.org/10.3390/aerospace11080615
Chicago/Turabian StyleZuo, Mingcheng, Rukiah S. Mitri, Igor Gai, Giancorrado Brighi, and Paolo Tortora. 2024. "Spectral Properties of Bistatic Radar Signals Using the Ray Tracing Technique and a Facet Approach" Aerospace 11, no. 8: 615. https://doi.org/10.3390/aerospace11080615
APA StyleZuo, M., Mitri, R. S., Gai, I., Brighi, G., & Tortora, P. (2024). Spectral Properties of Bistatic Radar Signals Using the Ray Tracing Technique and a Facet Approach. Aerospace, 11(8), 615. https://doi.org/10.3390/aerospace11080615