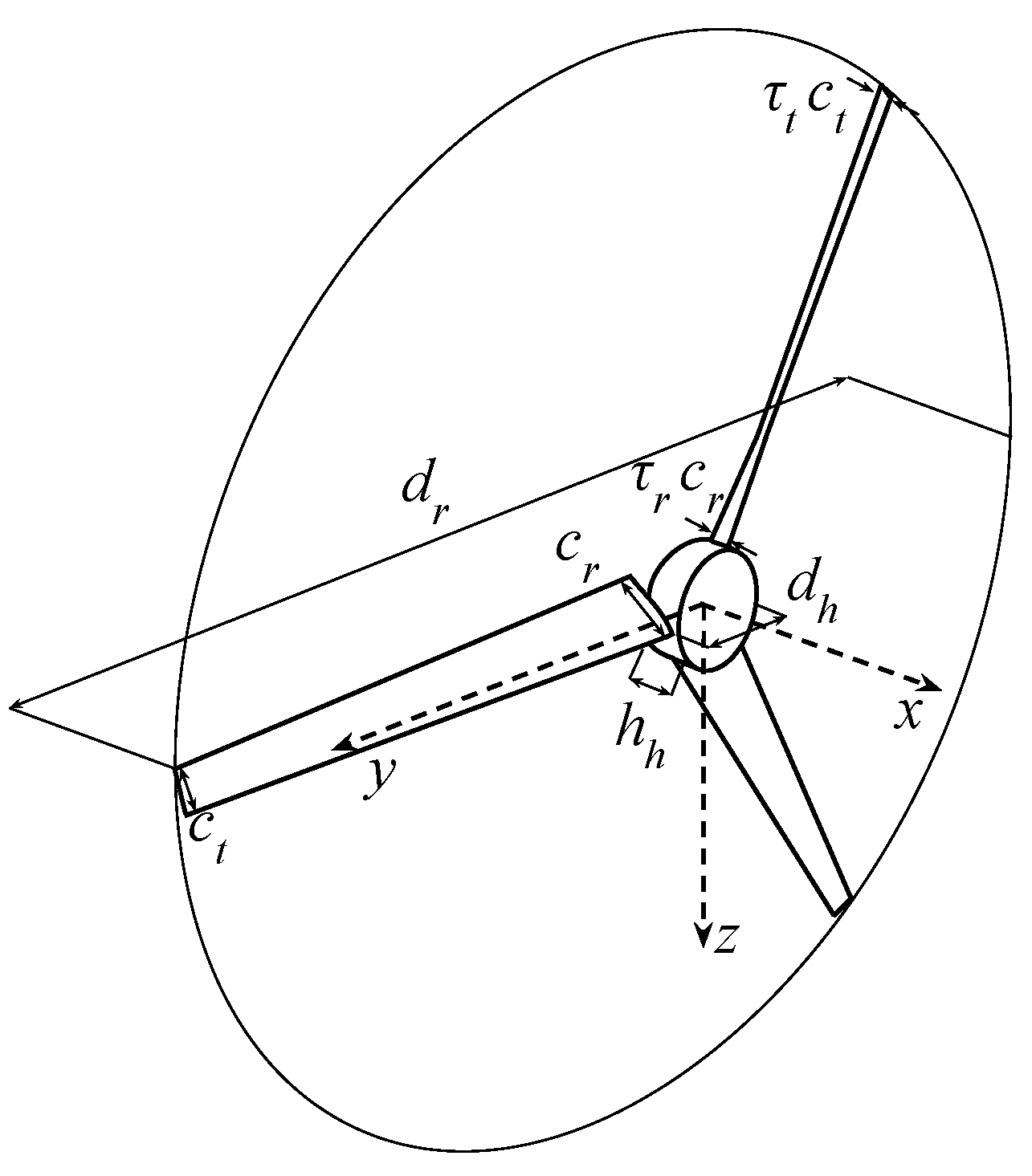
A wing segment can be wholly defined by the semispan
b, root chord
, tip chord
, root airfoil percent maximum thickness
, tip airfoil percent maximum thickness
, airfoil thickness distribution
, quarter-chord sweep angle
, dihedral angle
, and airfoil thickness distribution
. A drawing of a wing segment is shown in
Figure 1. In the present method, sweep and dihedral angles are assumed to be constant, and chord and airfoil thickness are allowed to vary linearly from root to tip. In this development, the influences of the wing twist and airfoil camber are neglected, as these generally have a minor effect on the mass properties of the wing relative to the other parameters listed.
Here, the quarter-chord location at the wing root is selected as the origin for the wing coordinate frame. The
x-axis is aligned with the chord-line and points out the leading edge, the
y-axis is specified as positive from the root to tip of a right wing, and the
z-axis points out the bottom of the wing, completing the right-handed coordinate system. Wing sweep is defined as a chordwise shearing of the wing in the
plane, whereas dihedral is defined as a rotation of the wing coordinate frame about an aircraft body-fixed
x-axis. Therefore, the present analysis includes the effects of sweep on the inertia properties of the wing in the wing coordinate system. However, since dihedral is a solid-body rotation of the wing, the effects of dihedral are not included in the wing coordinate system but can be easily accounted for in the aircraft coordinate system by rotating the results obtained from this analysis [
24]. Note, semispan length
b is defined parallel to the
y-axis.
The airfoil used for the wing segment can have a significant effect on the mass properties of the wing. The mass properties of the airfoil are calculated to include effects due to airfoil thickness distribution, and neglect effects due to camber. For the purposes of this analysis, it is helpful to define an airfoil coordinate system. The traditional coordinate frame for an airfoil is used here, with the origin at the airfoil leading-edge, the x-axis pointing along the chord-line out the trailing edge, and the y-axis pointing up normal to the x-axis. The ordinates are subscripted as and for clarity.
In the present analysis, the thickness distribution function
is held constant across the wing segment, although the maximum thickness
is allowed to vary linearly as shown in Equation (
5). The method presented here can be used to account for any arbitrary thickness distribution
. Results for two thickness distributions are included as examples. The two thickness distributions that are considered here are the NACA 4-digit series distribution, and a diamond airfoil distribution. The thickness distribution of the NACA 4-digit series [
25] is
2.1.1. Volume and Center of Gravity
The volume, mass, center of gravity, and inertia properties of the wing require solving the general volume integrals given in detail in [
24]. Each of these integrals are volume integrals with terms of the form
where
i,
j, and
k are each whole numbers. For brevity, detailed solutions to those integrals are not included here but are included in [
24] and have the general form
The solutions to Equation (
7) will be referenced here as
. Integrals related to the airfoil thickness distribution are also included in [
24].
The boundary of a wing-segment in the wing segment coordinate frame is defined by the region
where the following change in variables has been applied:
This change in variables results in the following derivatives:
Note, the negative signs in the derivatives for x and z, when applied in the integral derivations, flip the integrand direction from 1 through 0 to 0 through 1.
The local chord and maximum airfoil thickness given in Equations (
4) and (
5) can be written using this change in variables as follows:
Because the dimensional
x and
values for the
change in variables in Equation (
9) are in the wing segment coordinate system, the symbol
is equivalent to the local airfoil chordwise ratio
. Therefore, because we are fixing
to be constant along the wing, the general thickness distribution given in Equation (
1) can be written as a function of both spanwise location and chordwise coordinate.
For the NACA 4-digit thickness distribution,
and for the diamond airfoil thickness distribution,
Due to the definition of thickness distribution in the chordwise direction, the
z bounds depend on the chordwise coordinate
x. Also, due to the definition of linear changes in chord and airfoil thickness, the
x and
z bounds depend on the spanwise coordinate
y. The change in variables and corresponding bounds are applied to the
volume integral in Equation (
7) as
where
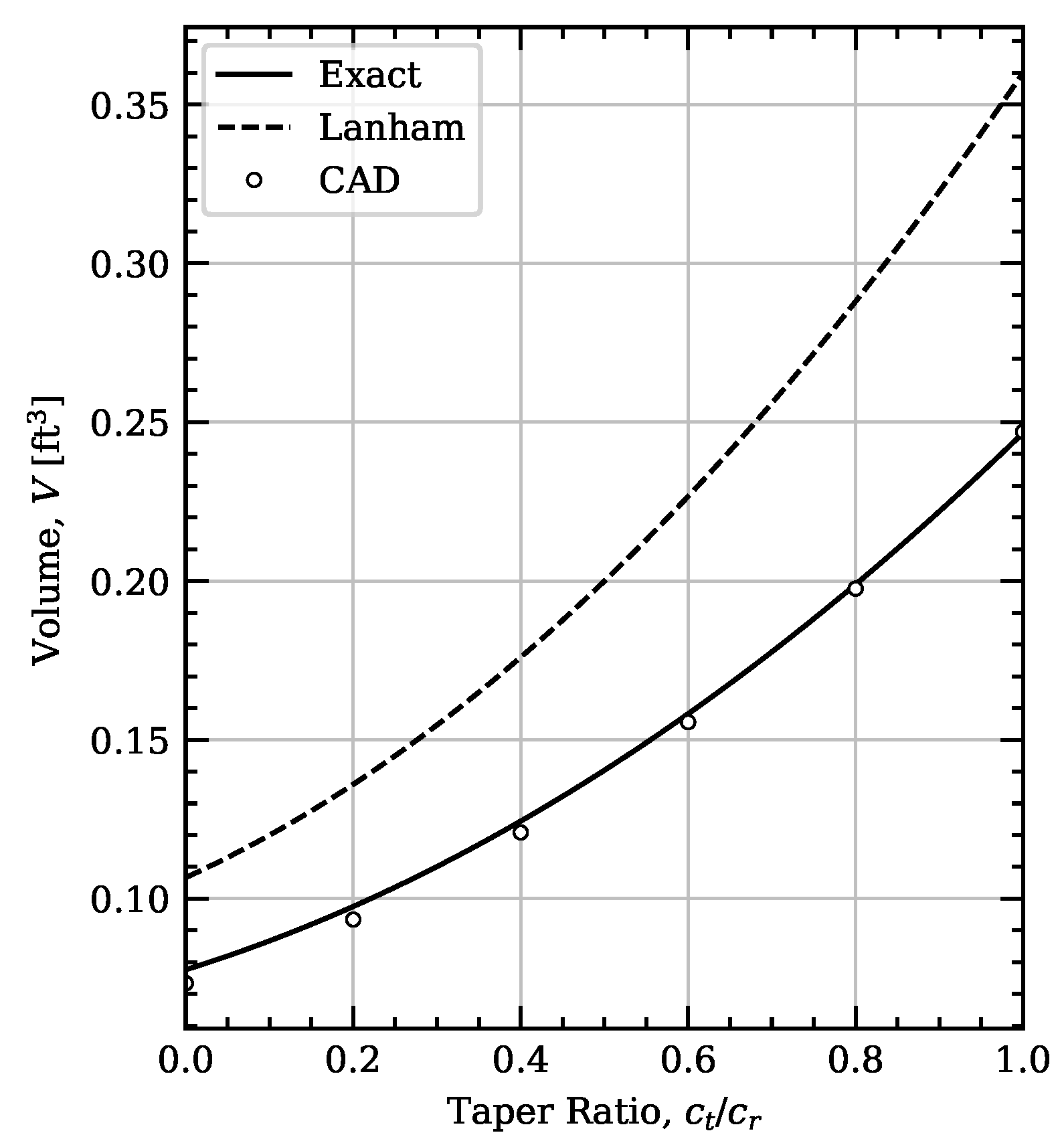
Applying the change in variables and integrating gives the volume of the wing segment
where
The parameter
depends on the integral shown in Equation (
17), which is a function of the thickness distribution (solved as shown in [
24]). For a wing using the NACA 4-digit thickness distribution,
and for a wing using the diamond airfoil thickness distribution,
Detailed derivations of the integrals resulting in the expressions for
and
are included in Moulton and Hunsaker [
24]. The wing mass is related to the density
through
The center of gravity of the wing segment is related to the mass-moment about each axis. Because sweep affects the
x coordinate of the mass of the wing, the sweep angle must be accounted for when computing the
x-coordinate of the CG location. The shift due to sweep,
, can be applied to the
x-coordinate, which gives
It should be noted that sweep does not need to be applied to the integrations for
or
because these integrals do not contain an
x term, and sweep does not affect the
y or
z coordinates of mass within the wing segment. Because sweep affects a right wing differently than a left wing, the difference in solution between left and right wings will be accounted for by defining
The integrals required to find
,
, and
about the wing root quarter-chord are given in Moulton and Hunsaker [
24] and result in
where
For a wing using the NACA 4-digit thickness distribution [
24],
and for a wing using the diamond airfoil thickness distribution [
24],
Using Equation (
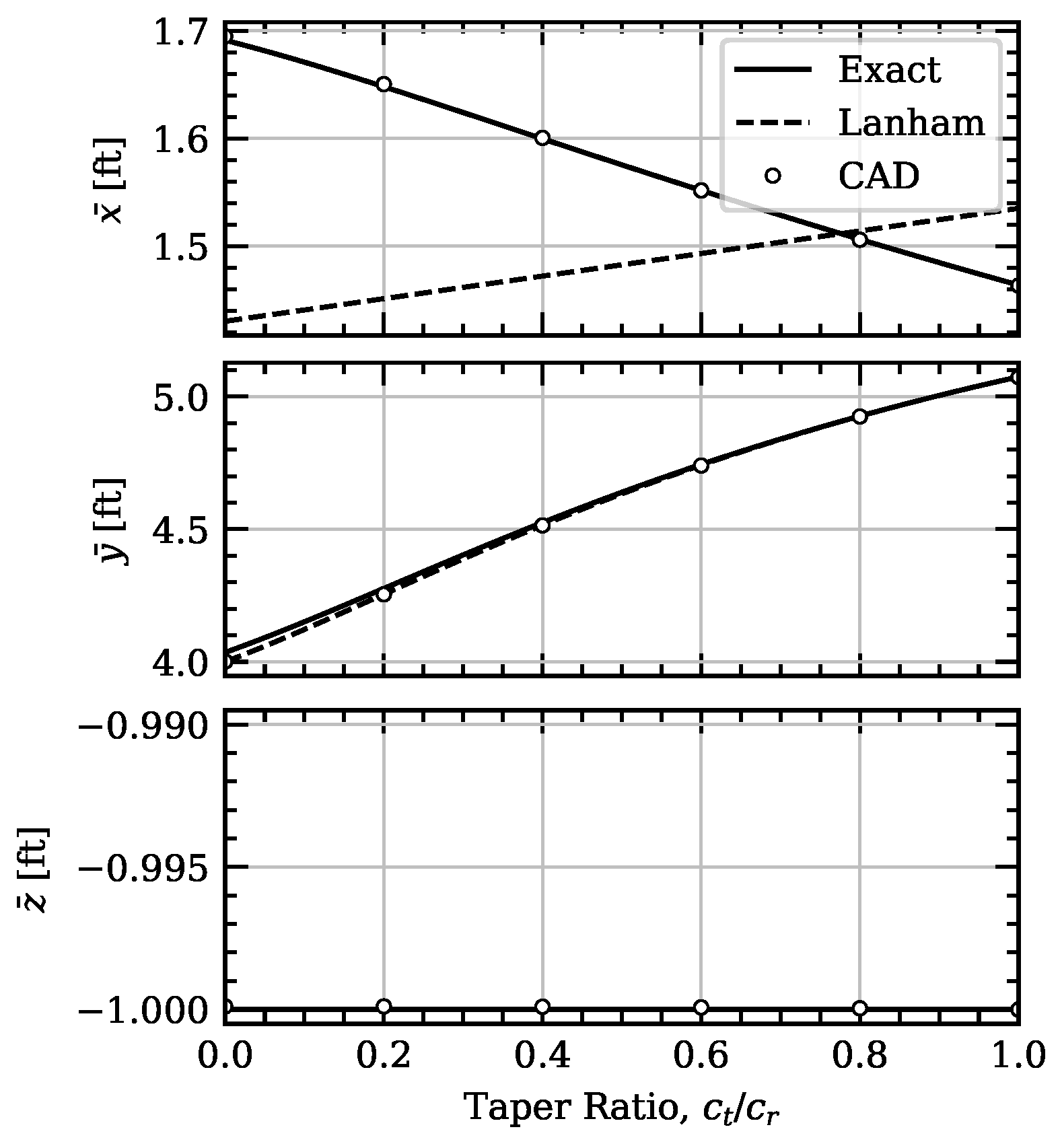
18) and applying the result along with Equations (25)–(27) gives the location of the CG relative to the wing origin:
Because twist and camber are neglected, the z coordinate of the CG location, , is zero. Note, sweep only affects the x coordinate of the CG location, .
2.1.2. Inertia Tensor
The inertia tensor for the wing segment can be computed about the origin of the wing segment coordinate system. Applying the shift due to sweep results in the inertia tensor about the wing segment origin
The volume integrals required in Equation (
35) can be expressed as [
24]
where
and
For a wing using the NACA 4-digit thickness distribution [
24],
and for a wing using the diamond airfoil thickness distribution [
24],
Because mass is directly related to volume and density, the tensor components can also be expressed as
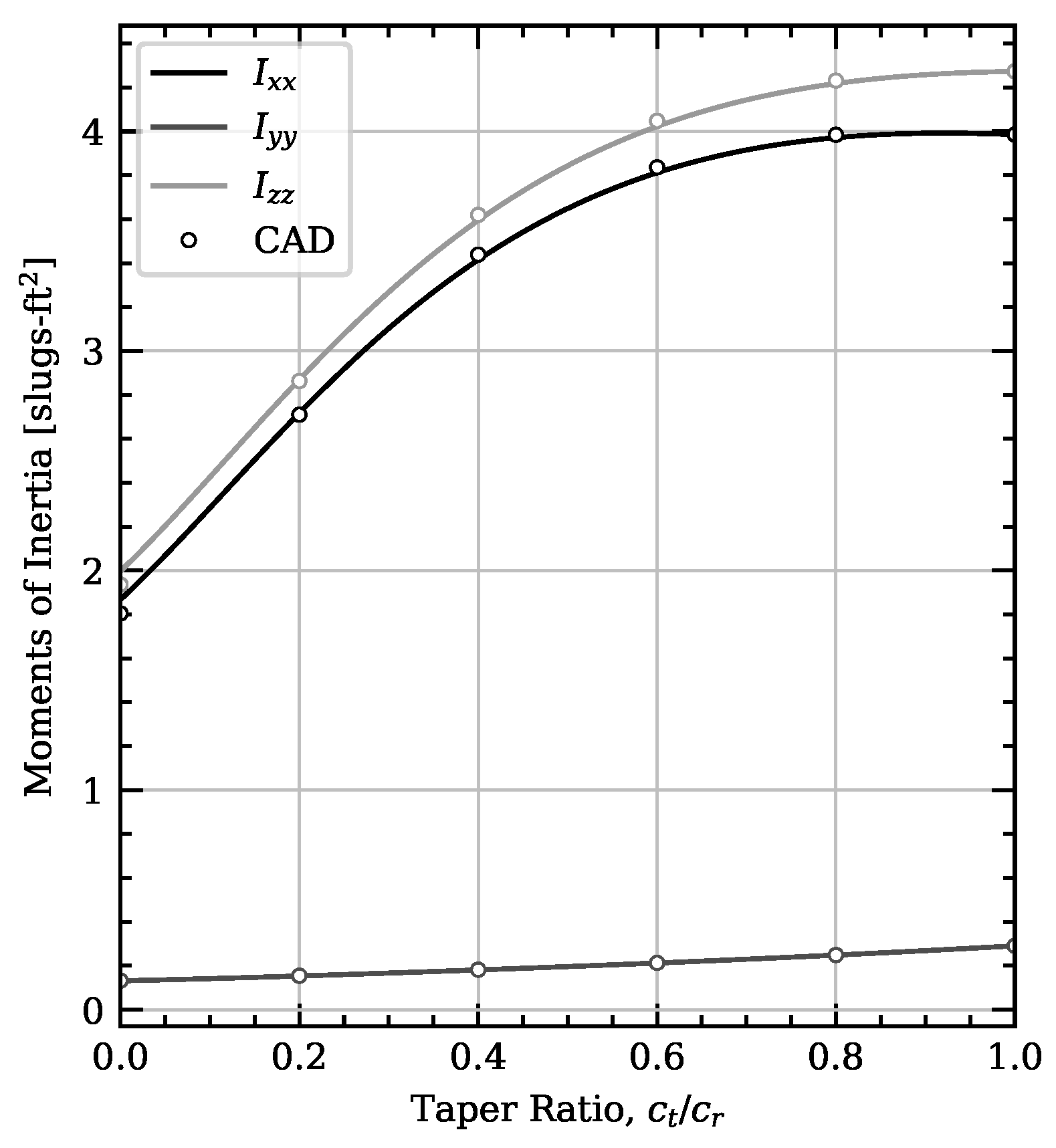
The inertia components given in Equations (37)–(42) and (51)–(55) can be used in Equation (
36) to compute the inertia tensor about the origin of the wing segment coordinate frame. However, in order to include the inertia components of the wing segment in the computation of the inertia of an entire aircraft, it is helpful to know the inertia components of the wing segment about the CG of the wing segment. From the parallel axis theorem, the inertia tensor about an arbitrary point
is related to the inertia tensor about the CG
according to
where
s is the vector from the CG to the point of interest and
is a
identity matrix. This relationship can be rearranged to yield the inertia about the wing segment CG given the inertia about the origin of the wing segment coordinate system
where
is the vector from the wing segment CG to the wing segment origin
Using Equation (
58) in Equation (
57) and simplifying gives the inertia tensor of the wing segment about the wing segment CG





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}