
Guiding Lunar Landers: Harnessing Neural Networks for Dynamic Flight Control with Adaptive Inertia and Mass Characteristics

 ,
,
Abstract
1. Introduction
2. Modeling the Dynamics
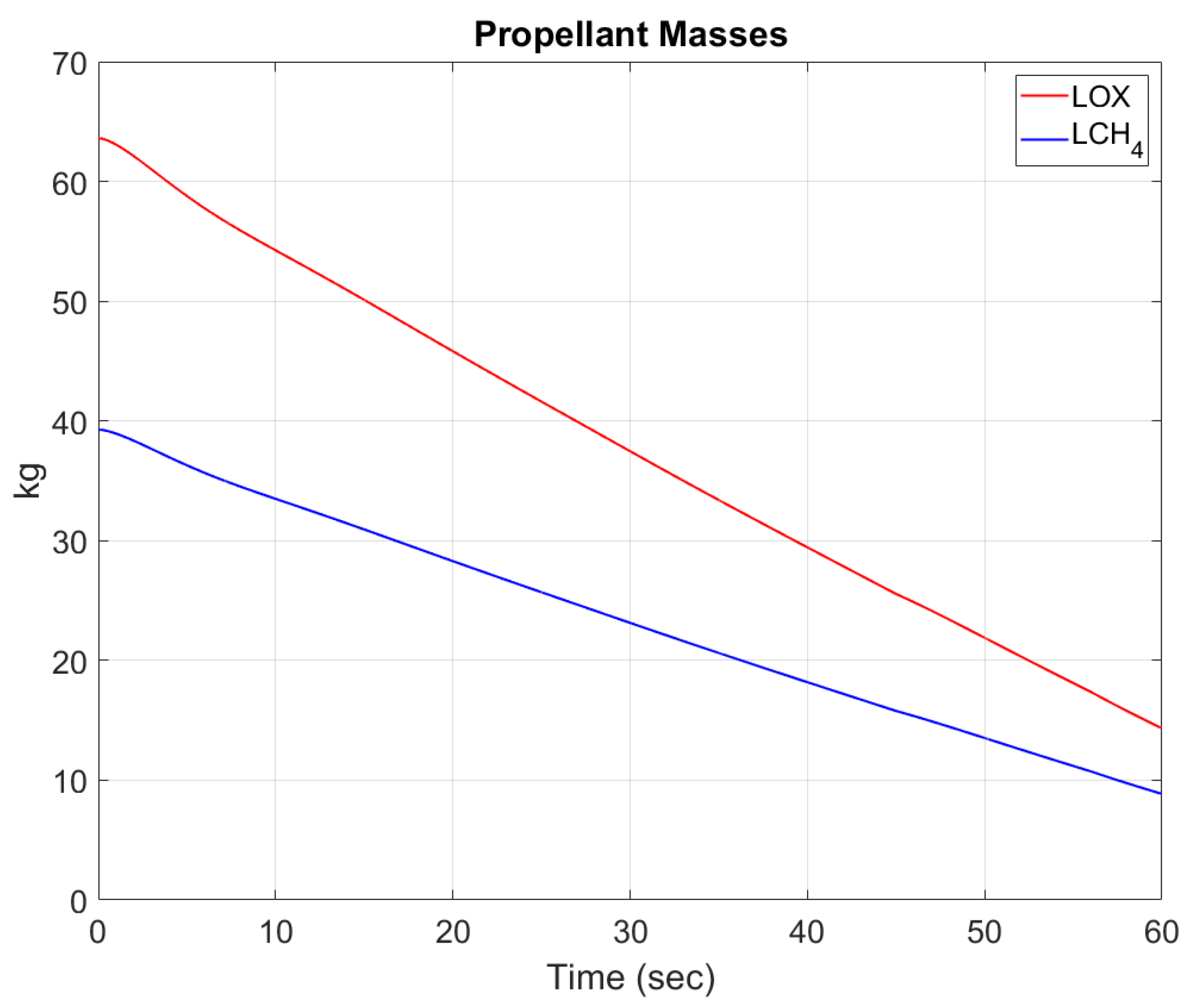
2.1. Modeling the Mass Variation
2.2. Modeling the Variation in COM and Moment of Inertia
2.3. Modeling the Time Delay of the Engine
2.4. Modeling the Dynamics
2.5. Control Mechanism
3. Numerical Results
3.1. Mission
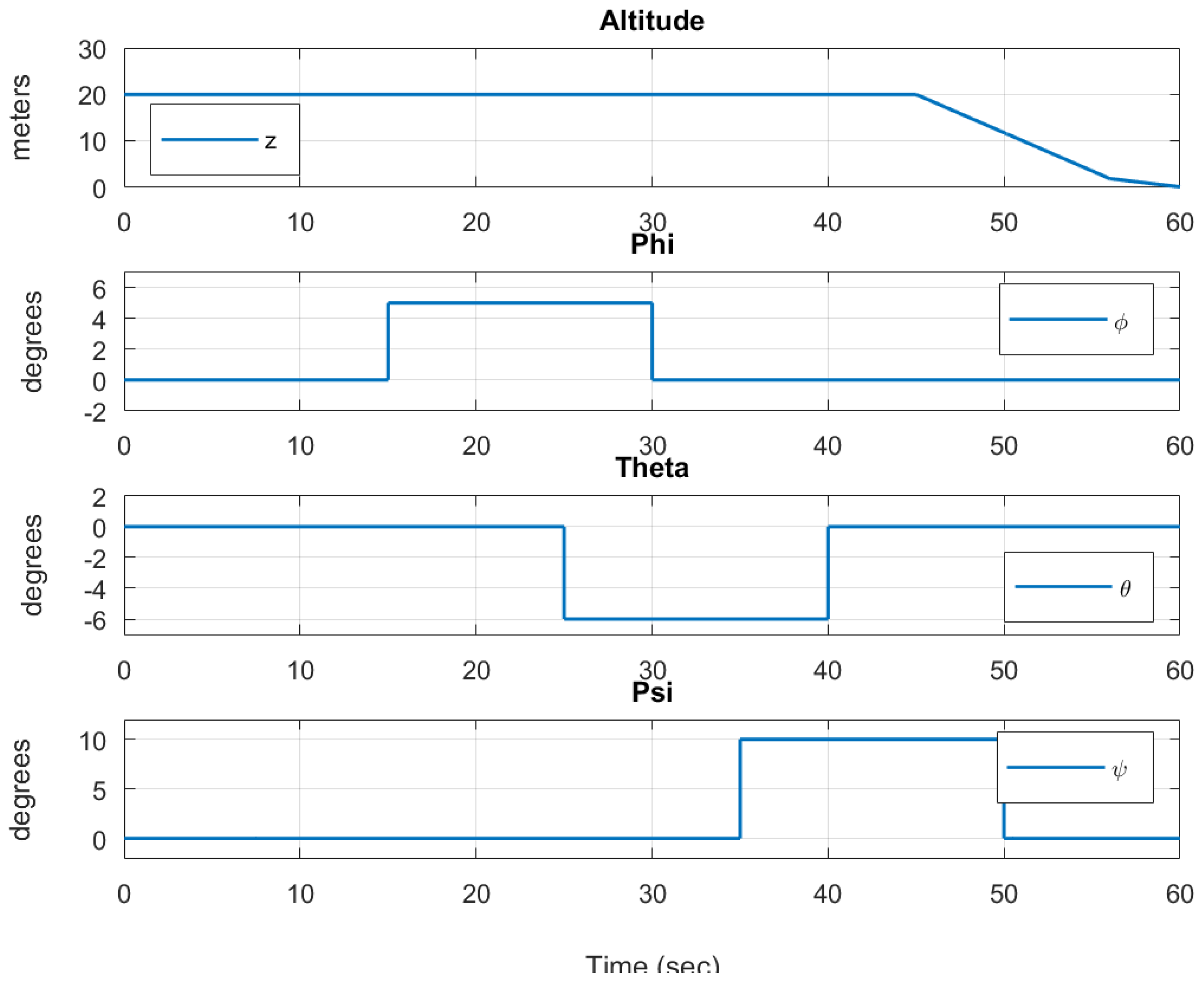
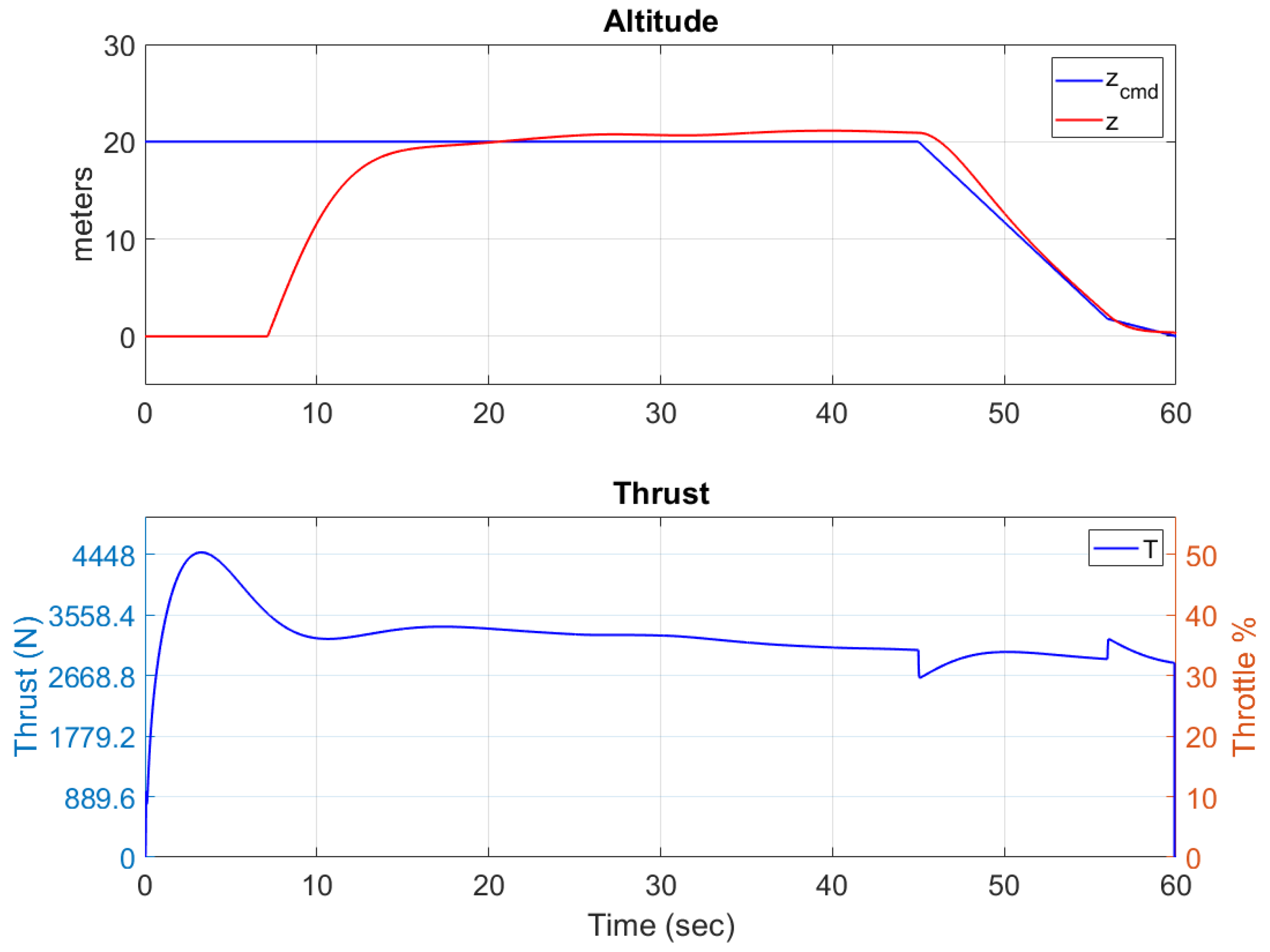
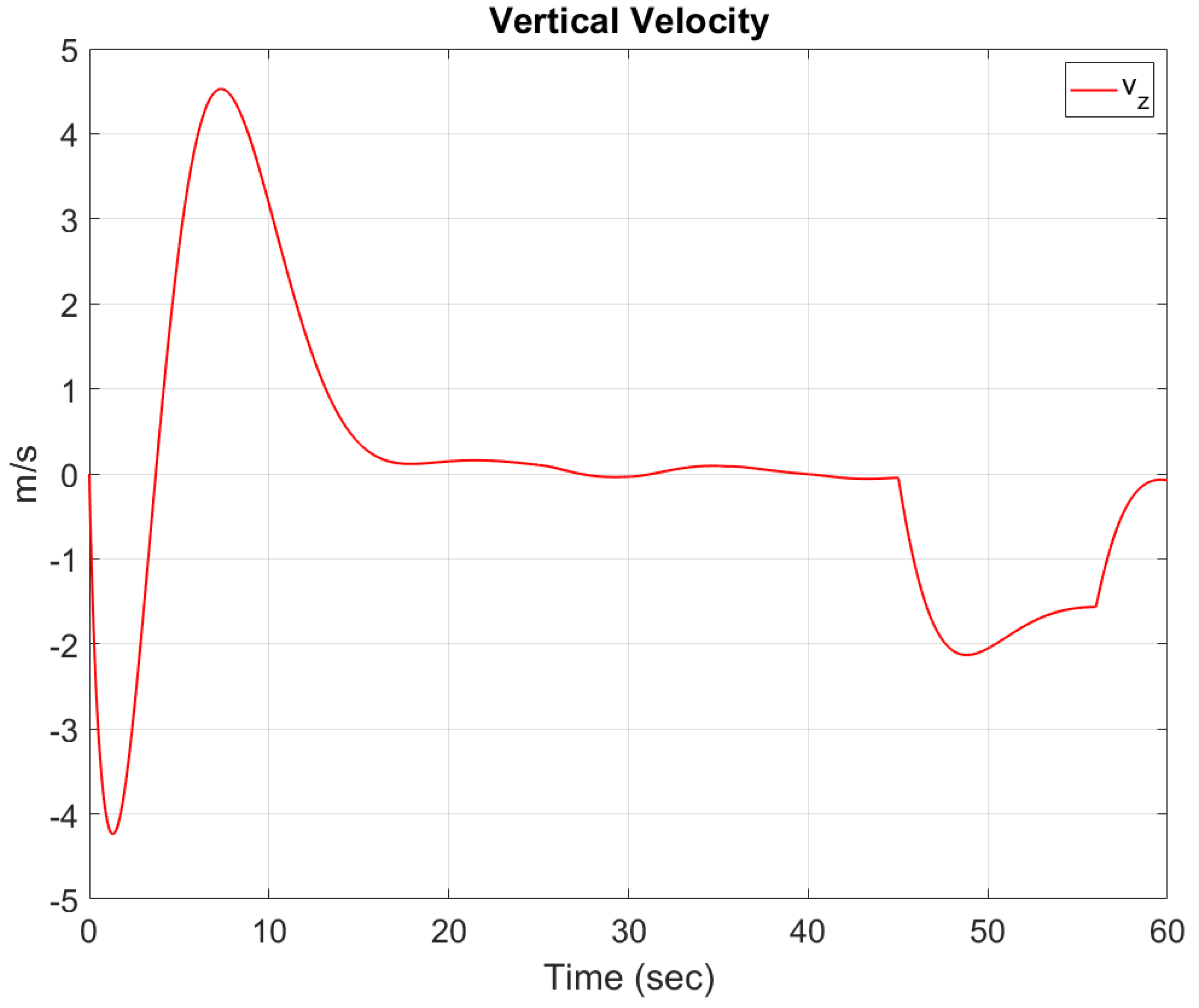
3.2. Altitude Control
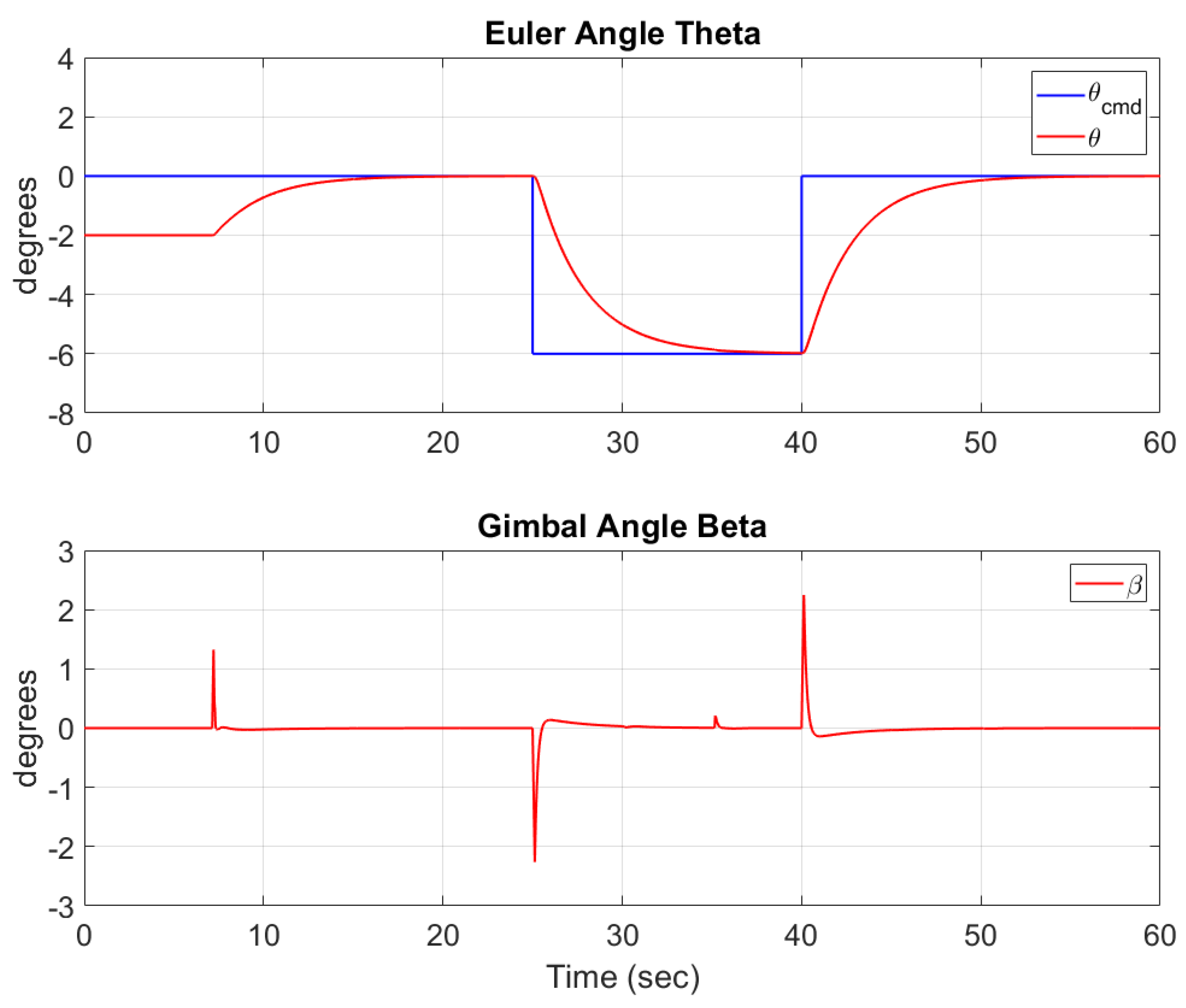
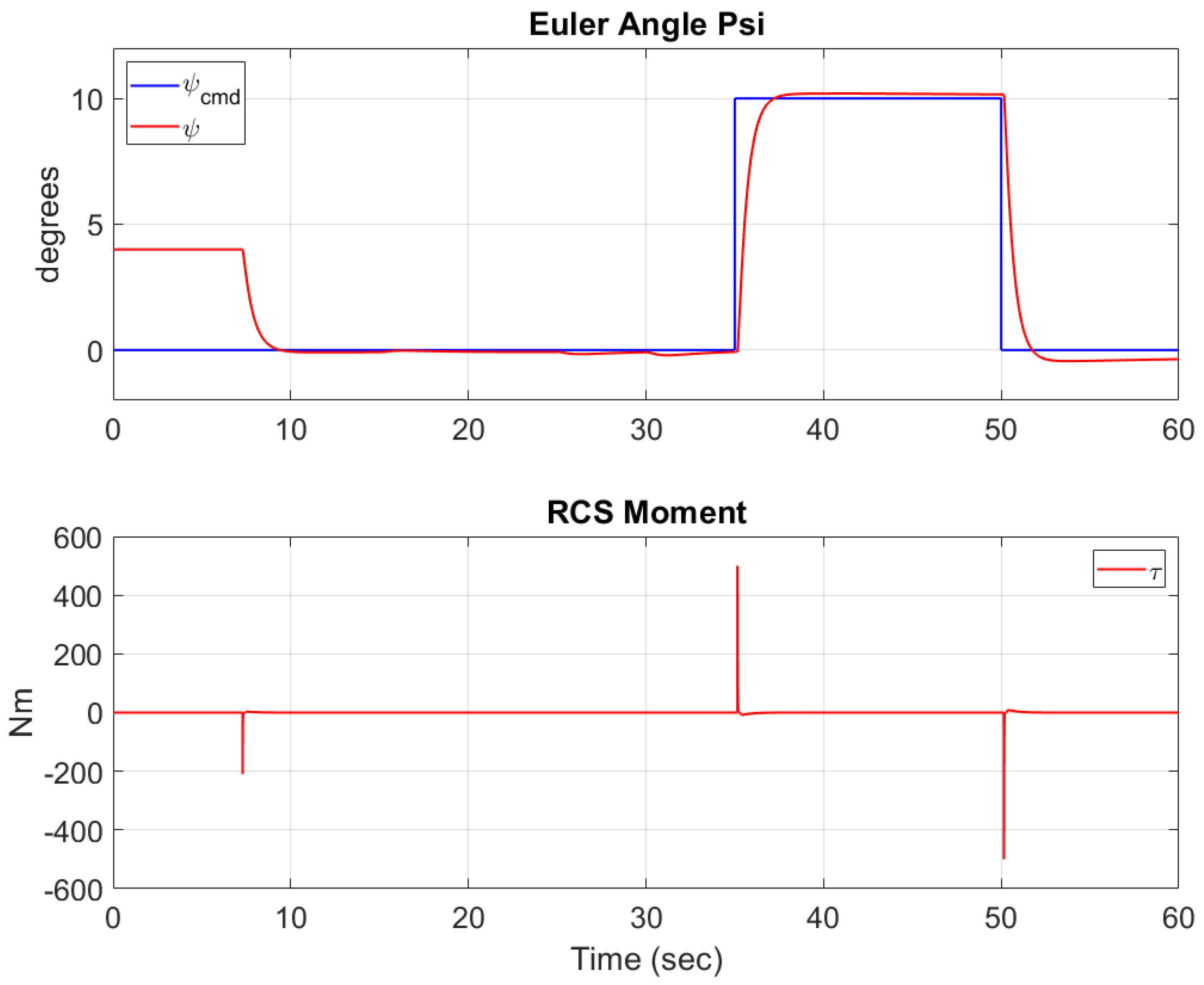
3.3. Rotational Control
4. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Smith, M.; Craig, D.; Herrmann, N.; Mahoney, E.; Krezel, J.; McIntyre, N.; Goodliff, K. The Artemis program: An overview of NASA’s activities to return humans to the moon. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–10. [Google Scholar]
- Cohen, B.A.; Chavers, D.G.; Ballard, B.W. NASA’s robotic lunar lander development project. Acta Astronaut. 2012, 79, 221–240. [Google Scholar] [CrossRef]
- Gambone, E.A. Morpheus Lander Roll Control System and Wind Modeling. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 5–9 January 2015; p. 0330. [Google Scholar]
- Li, C.; Wang, C.; Wei, Y.; Lin, Y. China’s present and future lunar exploration program. Science 2019, 365, 238–239. [Google Scholar] [CrossRef] [PubMed]
- Pozza, M.A.; Dennerley, J.A. Risk Management in Outer Space Activities; Springer: Singapore, 2022. [Google Scholar]
- Hurlbert, E.A.; Ueno, H.; Alexander, L.; Klem, M.D.; Daversa, E.; Rualt, J.M.; Manfletti, C.; Caruana, J.N.; Asakawa, H.; Whitley, R.J. International space exploration coordination group assessment of technology gaps for LOX/Methane propulsion systems for the global exploration roadmap. In Proceedings of the AIAA SPACE 2016, Long Beach, CA, USA, 13–16 September 2016; p. 5280. [Google Scholar]
- Hurlbert, E.A.; Atwell, M.J.; Melcher, J.C.; Morehead, R.L. Integrated pressure-fed liquid oxygen/methane propulsion systems-Morpheus experience, MARE, and future applications. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UT, USA, 25–27 July 2016; p. 4681. [Google Scholar]
- Smith, T.; Klem, M.; Fisher, K. Propulsion risk reduction activities for non-toxic cryogenic propulsion. In Proceedings of the AIAA Space 2010 Conference & Exposition, Anaheim, CA, USA, 30 August–2 September 2010; p. 8680. [Google Scholar]
- Klem, M.D.; Smith, T.D.; Wadel, M.F.; Meyer, M.L.; Free, J.M.; Cikanek, H.A., III. Liquid oxygen/liquid methane propulsion and cryogenic advanced development. In Proceedings of the 62nd International Aeronautical Congress, Cape Town, South Africa, 3–7 October 2011; number E-17931. [Google Scholar]
- Olansen, J.B.; Munday, S.; Devolites, J.; Baine, M. Project Morpheus: Lessons learned in lander technology development. In Proceedings of the AIAA SPACE 2013 Conference and Exposition, San Diego, CA, USA, 10–12 September 2013; p. 5310. [Google Scholar]
- Weiss, S.P. Apollo Experience Report: Lunar Module Structural Subsystem; Technical Report; NASA Technical Reports Server: Hampton, VA, USA, 1973. [Google Scholar]
- Choe, Y.; Park, C.G. LiDAR-Inertial-Based Absolute Positioning with Sparse DEM for Accurate Lunar Landing. IEEE Trans. Aerosp. Electron. Syst. 2024, 1–14. [Google Scholar] [CrossRef]
- Mohon, L. NASA Tests Methane Engine Components for Next Generation Landers. 2015. Available online: https://www.nasa.gov/technology/space-travel-tech/nasa-tests-methane-powered-engine-components-for-next-generation-landers/ (accessed on 15 January 2024).
- Cortés-Martínez, R.; Kumar, K.D.; Rodríguez-Cortés, H. Precise power descent control of a lunar lander using a single thruster. Acta Astronaut. 2021, 186, 473–485. [Google Scholar] [CrossRef]
- Sagliano, M.; Dumke, M.; Theil, S. Simulations and flight tests of a new nonlinear controller for the EAGLE lander. J. Spacecr. Rocket. 2019, 56, 259–272. [Google Scholar] [CrossRef]
- Rew, D.Y.; Ju, G.; Lee, S.; Kim, K.; Kang, S.W.; Lee, S.R. Control system design of the Korean lunar lander demonstrator. Acta Astronaut. 2014, 94, 328–337. [Google Scholar] [CrossRef]
- Jang, J.; Yang, L.; Fritz, M.; Nguyen, L.; Johnson, W.R.; Hart, J. Design and analysis of morpheus lander flight control system. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, San Diego, CA, USA, 4–7 August 2014; p. 4115. [Google Scholar]
- De Oliveira, A.; Lavagna, M. Development of a Controlled Dynamics Simulator for Reusable Launcher Descent and Precise Landing. Aerospace 2023, 10, 993. [Google Scholar] [CrossRef]
- Wang, C.; Nie, H.; Chen, J.; Lee, H.P. The design and dynamic analysis of a lunar lander with semi-active control. Acta Astronaut. 2019, 157, 145–156. [Google Scholar] [CrossRef]
- Li, W.; Song, Y.; Cheng, L.; Gong, S. Closed-loop deep neural network optimal control algorithm and error analysis for powered landing under uncertainties. Astrodynamics 2023, 7, 211–228. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, Z.; Jiang, F. Real-time control for fuel-optimal moon landing based on an interactive deep reinforcement learning algorithm. Astrodynamics 2019, 3, 375–386. [Google Scholar] [CrossRef]
- Sagliano, M.; Seelbinder, D.; Theil, S.; Lu, P. Six-degree-of-freedom rocket landing optimization via augmented convex–concave decomposition. J. Guid. Control Dyn. 2024, 47, 20–35. [Google Scholar] [CrossRef]
- Ponce, R. Development and Integration of the Janus Robotic Lander: A Liquid Oxygen-Liquid Methane Propulsion System Testbed; The University of Texas at El Paso: El Paso, TX, USA, 2017. [Google Scholar]
- MathWorks. Custom Variable Mass 6DOF (Euler Angles). 2006. Available online: https://www.mathworks.com/help/aeroblks/customvariablemass6dofeulerangles.html (accessed on 1 February 2024).
- Stevens, B.L.; Lewis, F.L.; Johnson, E.N. Aircraft Control and Simulation: Dynamics, Controls Design, and Autonomous Systems; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Hughes, P.C. Spacecraft Attitude Dynamics; Courier Corporation: Chelmsford, MA, USA, 2012. [Google Scholar]
- Bernacchia, D. Design of Thrust Vectoring Attitude Control System for Lunar Lander Flying Testbed. Ph.D. Thesis, Universita’ Di Bologna, Bologna, Italy, 2019. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L-1 | L-2 | L-3 | L-4 | L-5 | L-6 | |
|---|---|---|---|---|---|---|
| LOX Tank Fuel Levels (kg) | 63.61 | 50.88 | 38.166 | 25.44 | 12.72 | 0 |
| LCH4 Tank Fuel Levels (kg) | 39.27 | 31.42 | 23.56 | 15.71 | 7.85 | 0 |
| He Tank Fuel Levels (kg) | 0.79 | 0.63 | 0.48 | 0.32 | 0.16 | 0 |
| O-1 | O-2 | O-3 | O-4 | O-5 | O-6 | |
|---|---|---|---|---|---|---|
| X Axis Orientations | −30 | −20 | −10 | 10 | 20 | 30 |
| Y Axis Orientations | 0 | 0 | 0 | 0 | 0 | 0 |
| Z Axis Orientations | 0 | 0 | 0 | 0 | 0 | 0 |
| O-7 | O-8 | O-9 | O-10 | O-11 | O-12 | |
| X Axis Orientations | 0 | 0 | 0 | 0 | 0 | 0 |
| Y Axis Orientations | −30 | −20 | −10 | 10 | 20 | 30 |
| Z Axis Orientations | 0 | 0 | 0 | 0 | 0 | 0 |
| O-13 | O-14 | O-15 | O-16 | O-17 | O-18 | |
| X Axis Orientations | 10 | 20 | 30 | 10 | 20 | 30 |
| Y Axis Orientations | 10 | 10 | 10 | 20 | 20 | 20 |
| Z Axis Orientations | 0 | 0 | 0 | 0 | 0 | 0 |
| O-19 | O-20 | O-21 | O-22 | - | - | |
| X Axis Orientations | 10 | 20 | 30 | 0 | - | - |
| Y Axis Orientations | 30 | 30 | 30 | 0 | - | - |
| Z Axis Orientations | 0 | 0 | 0 | 0 | - | - |
| 8896 N | Gimbal saturation limit | ||
| m (full tanks) | 372 kg | m (empty tanks) | 269 kg |
| 63.61 kg | 2.26 kg/s | ||
| 39.27 kg | 1.40 kg/s |
| Angle | |||
|---|---|---|---|
| 0.5 | 1.4 | ||
| 0.5 | 1.4 | ||
| 1 | 0.007 | 30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ortega, A.G.; Enriquez-Fernandez, A.; Gonzalez, C.; Flores-Abad, A.; Choudhuri, A.; Shirin, A. Guiding Lunar Landers: Harnessing Neural Networks for Dynamic Flight Control with Adaptive Inertia and Mass Characteristics. Aerospace 2024, 11, 370. https://doi.org/10.3390/aerospace11050370
Ortega AG, Enriquez-Fernandez A, Gonzalez C, Flores-Abad A, Choudhuri A, Shirin A. Guiding Lunar Landers: Harnessing Neural Networks for Dynamic Flight Control with Adaptive Inertia and Mass Characteristics. Aerospace. 2024; 11(5):370. https://doi.org/10.3390/aerospace11050370
Chicago/Turabian StyleOrtega, Angel Guillermo, Andres Enriquez-Fernandez, Cristina Gonzalez, Angel Flores-Abad, Ahsan Choudhuri, and Afroza Shirin. 2024. "Guiding Lunar Landers: Harnessing Neural Networks for Dynamic Flight Control with Adaptive Inertia and Mass Characteristics" Aerospace 11, no. 5: 370. https://doi.org/10.3390/aerospace11050370
APA StyleOrtega, A. G., Enriquez-Fernandez, A., Gonzalez, C., Flores-Abad, A., Choudhuri, A., & Shirin, A. (2024). Guiding Lunar Landers: Harnessing Neural Networks for Dynamic Flight Control with Adaptive Inertia and Mass Characteristics. Aerospace, 11(5), 370. https://doi.org/10.3390/aerospace11050370