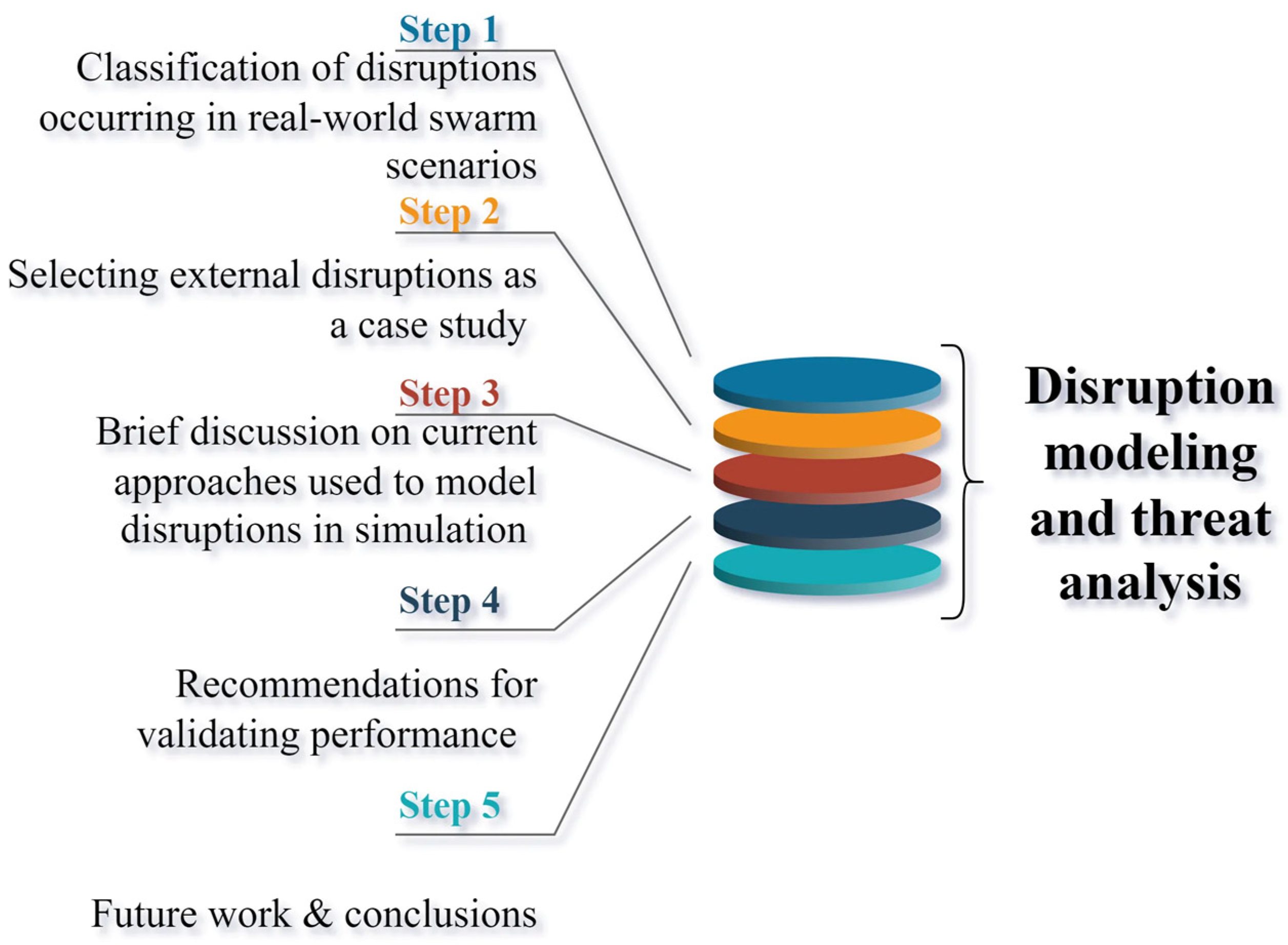
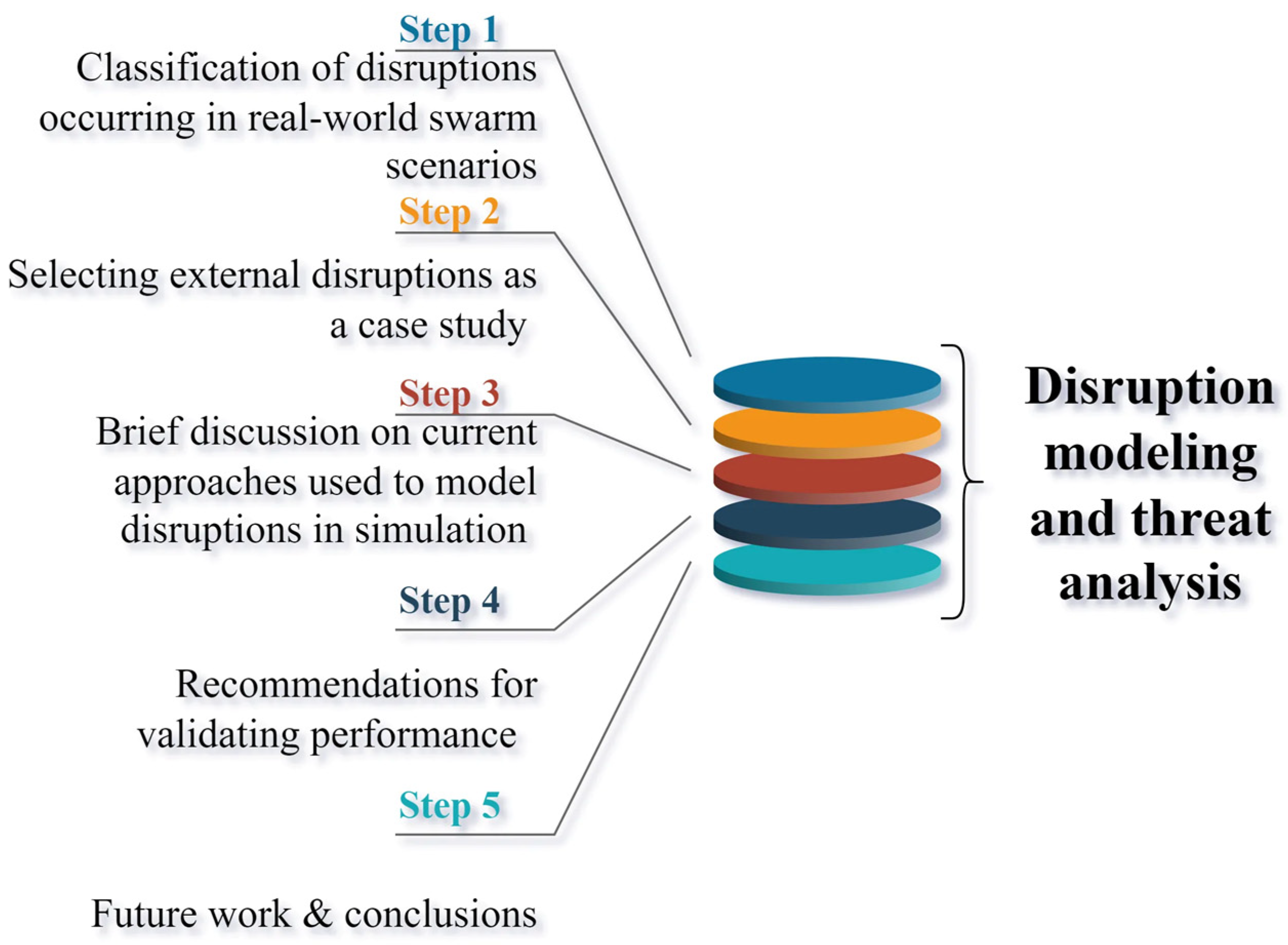
Figure 1.
The study process followed.
Figure 1.
The study process followed.
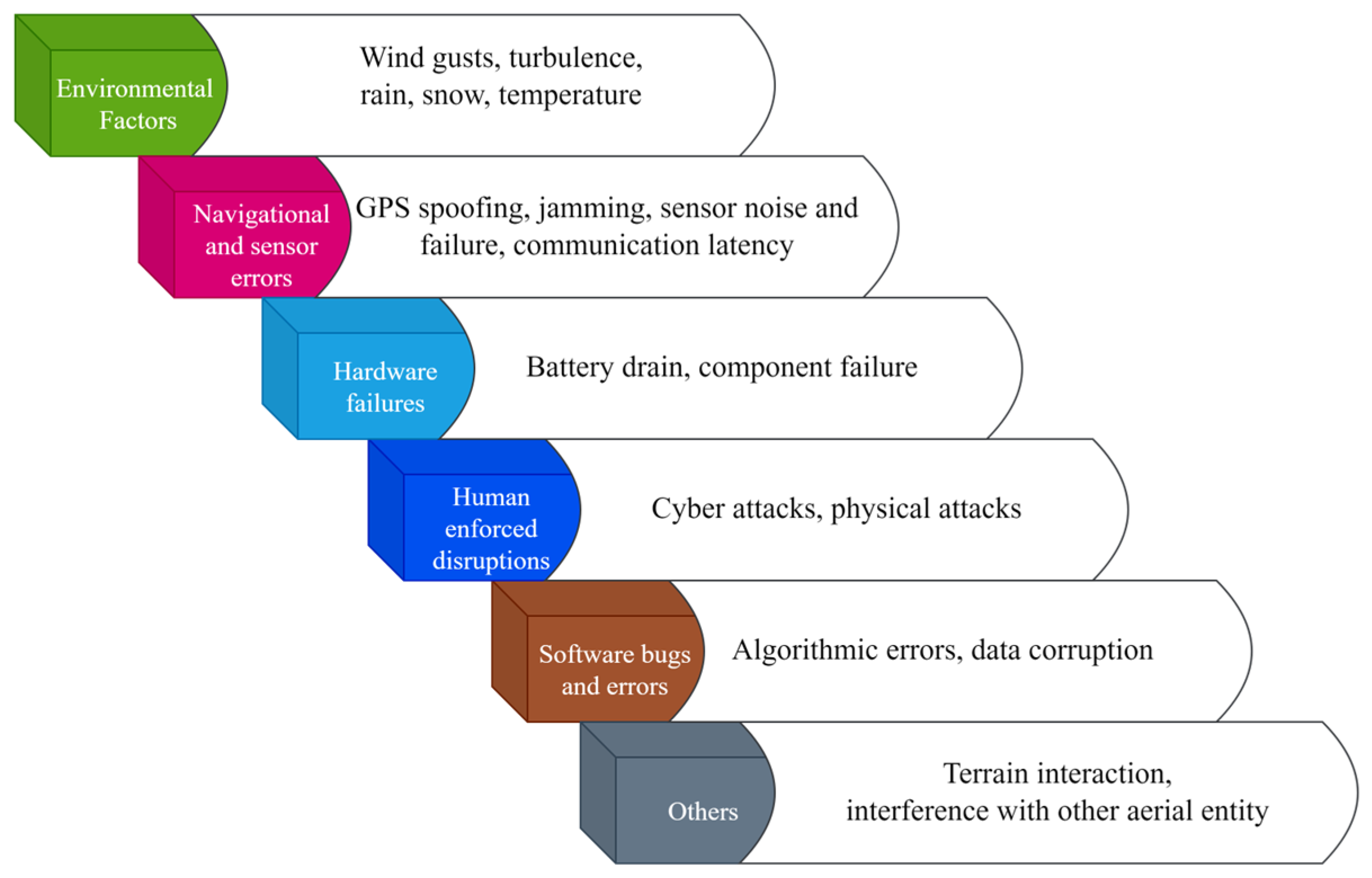
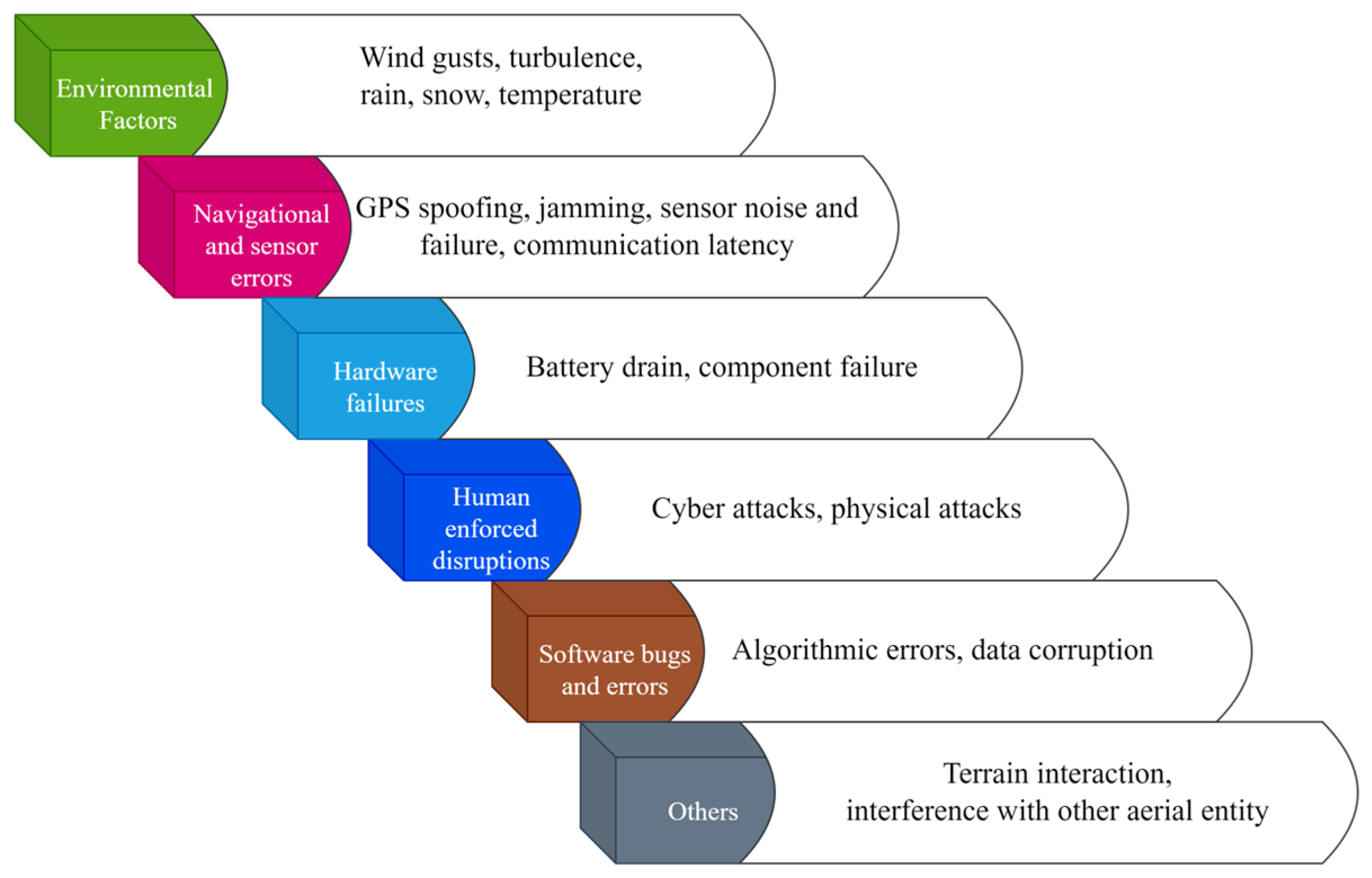
Figure 2.
A classification of all disruptions in the UAV operating environment.
Figure 2.
A classification of all disruptions in the UAV operating environment.
Figure 3.
A UAV is shown flying in a simulated Microsoft AirSim environment with rain and wind components. An enlarged view of the setting pane is also shown.
Figure 3.
A UAV is shown flying in a simulated Microsoft AirSim environment with rain and wind components. An enlarged view of the setting pane is also shown.
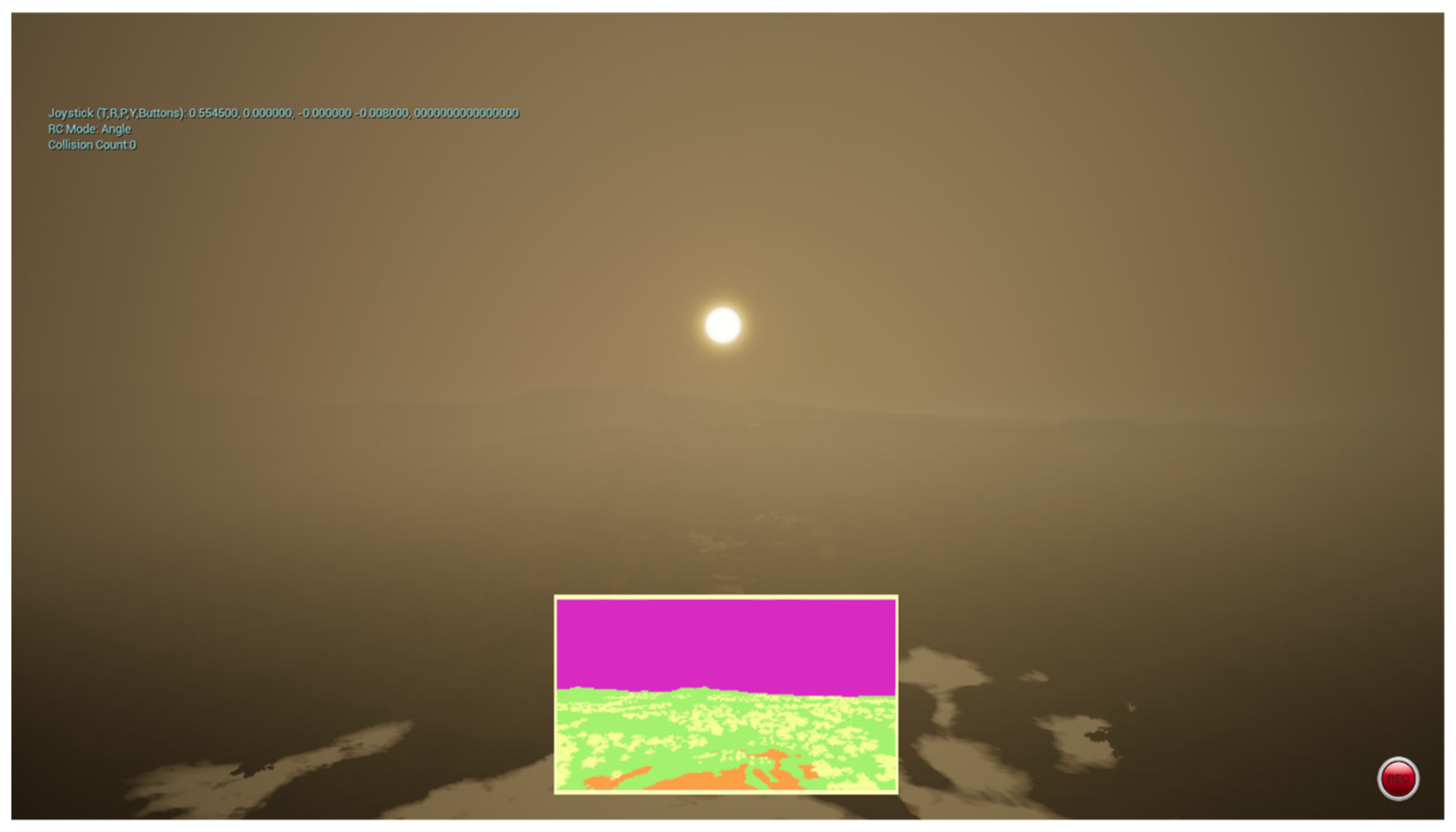
Figure 4.
A simulated environment with a dust storm and on-board camera field of view (FOV).
Figure 4.
A simulated environment with a dust storm and on-board camera field of view (FOV).
Figure 5.
A brief overview of methods for modeling the effects of winds in UAV simulations.
Figure 5.
A brief overview of methods for modeling the effects of winds in UAV simulations.
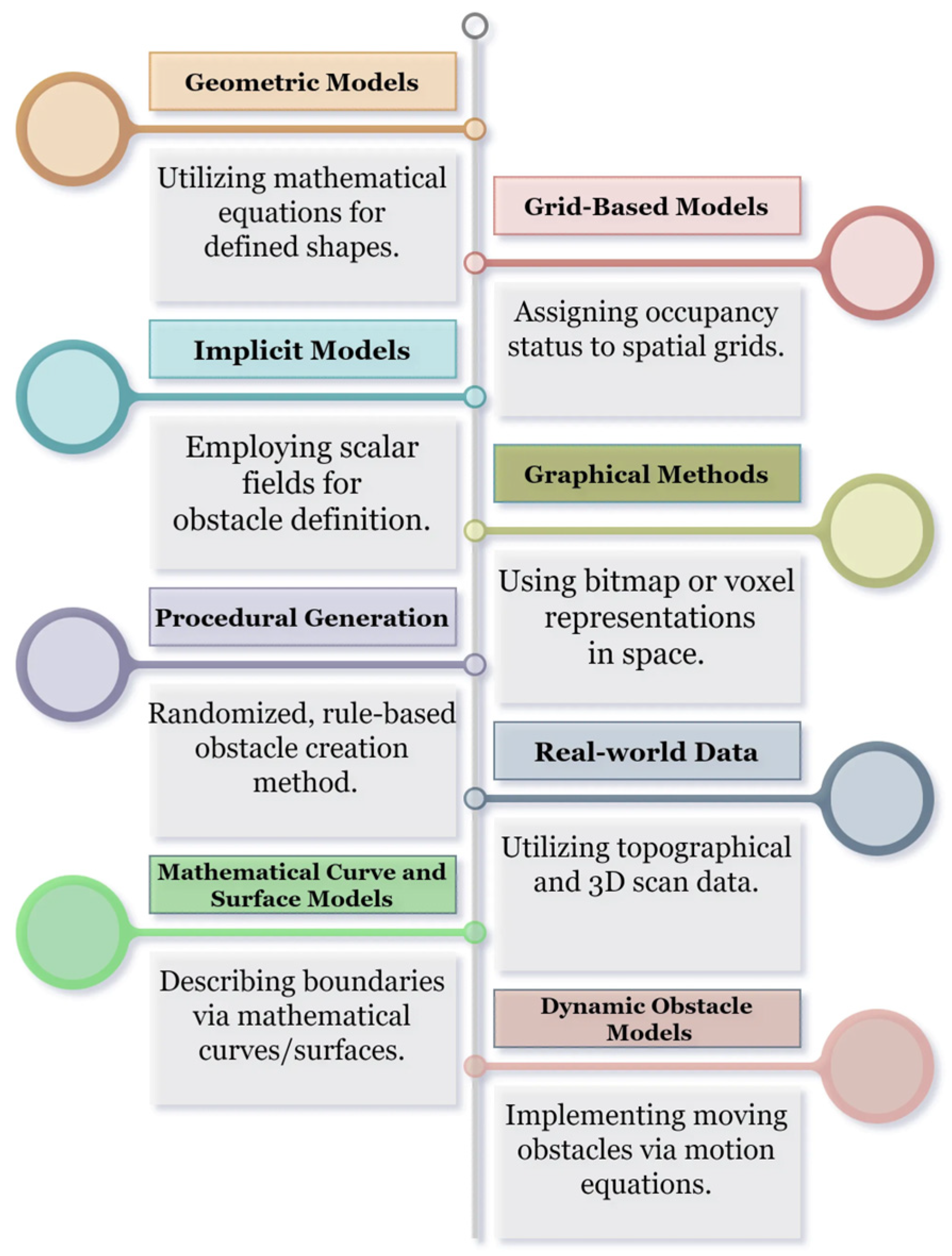
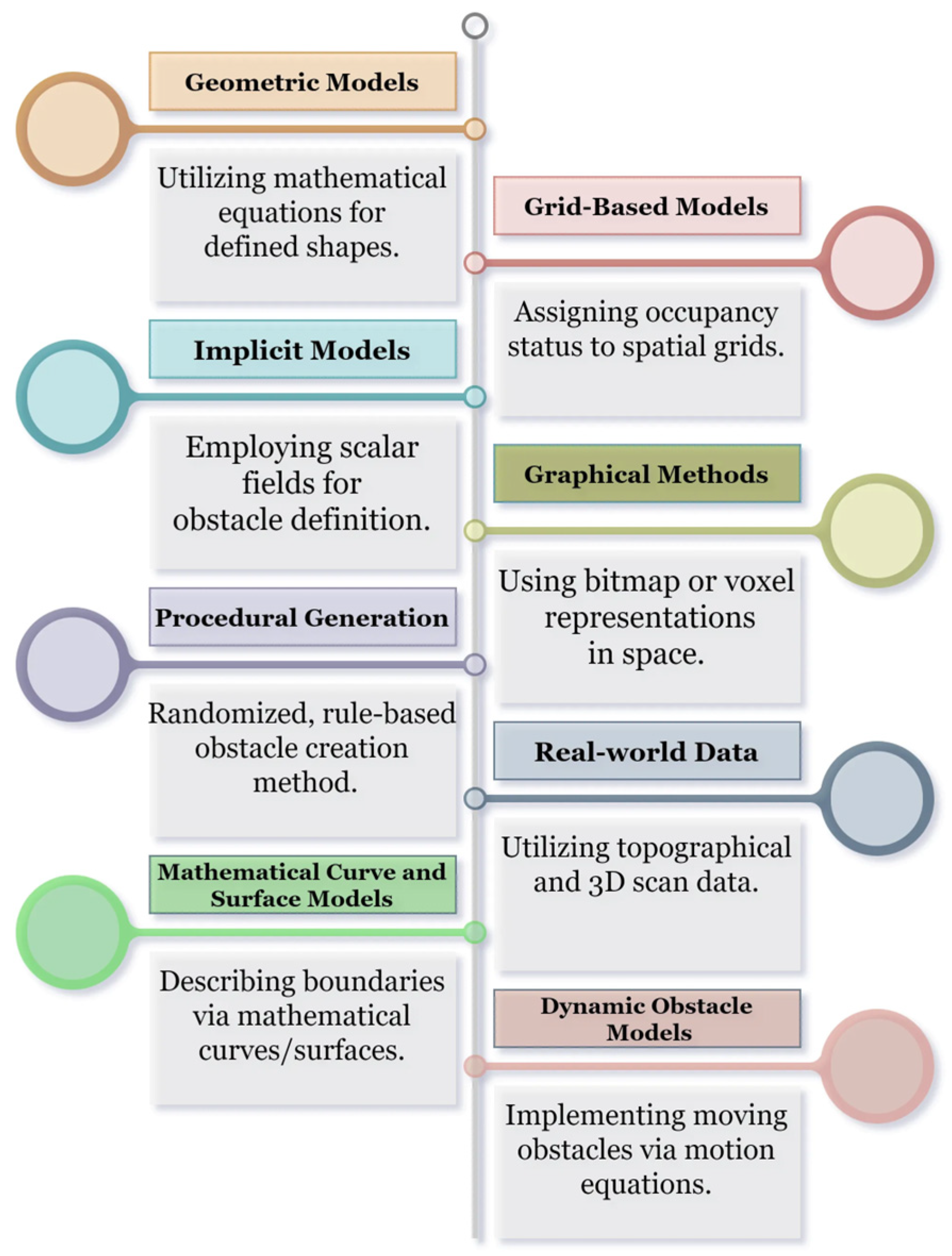
Figure 6.
An overview of obstacle modeling in simulation scenarios.
Figure 6.
An overview of obstacle modeling in simulation scenarios.
Figure 7.
A Gielis surface obstacle beside a hyperbolic riemannian geometry obstacle.
Figure 7.
A Gielis surface obstacle beside a hyperbolic riemannian geometry obstacle.
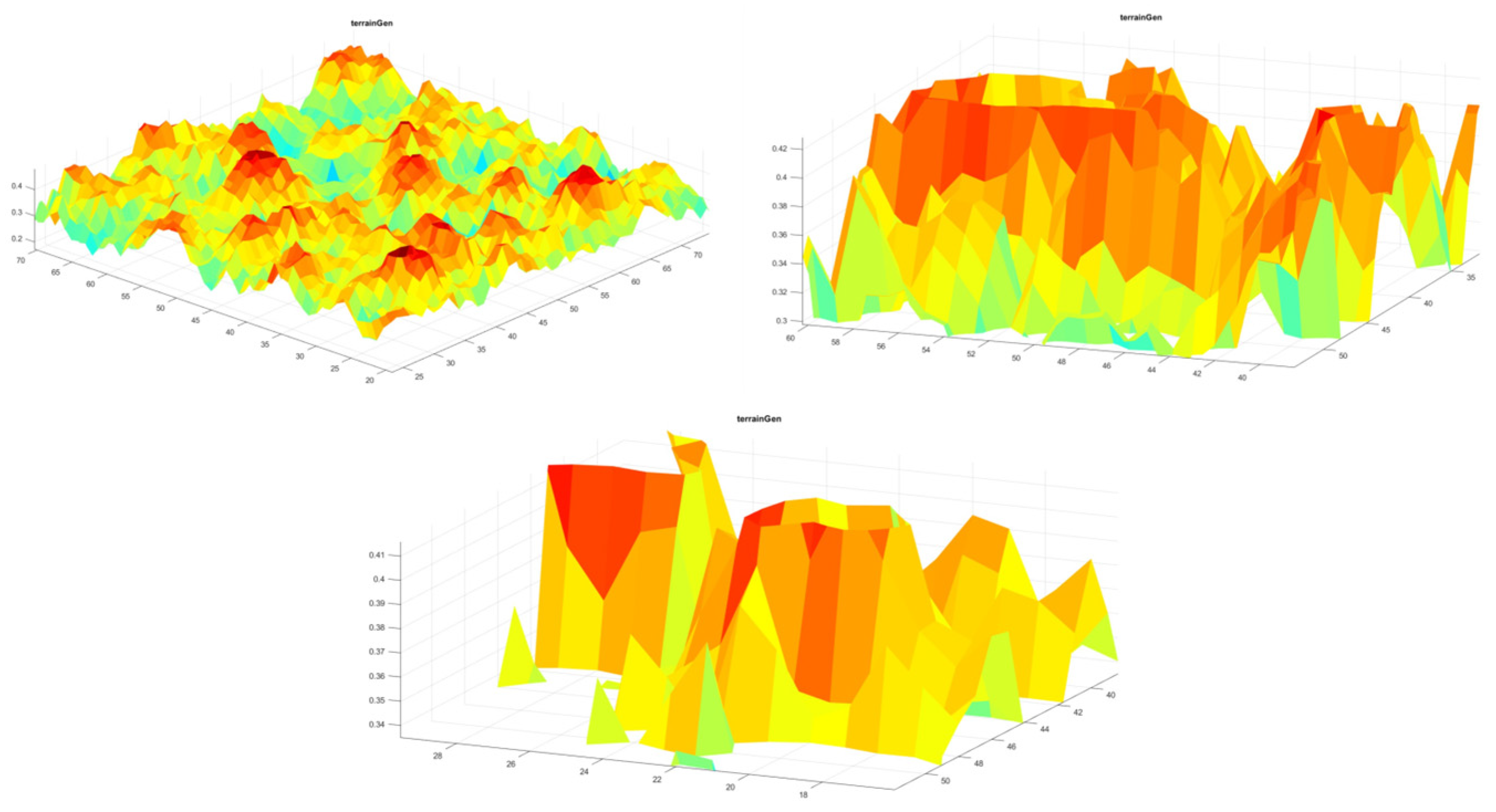
Figure 8.
Procedurally generated terrain in 3D space for swarm navigation test.
Figure 8.
Procedurally generated terrain in 3D space for swarm navigation test.
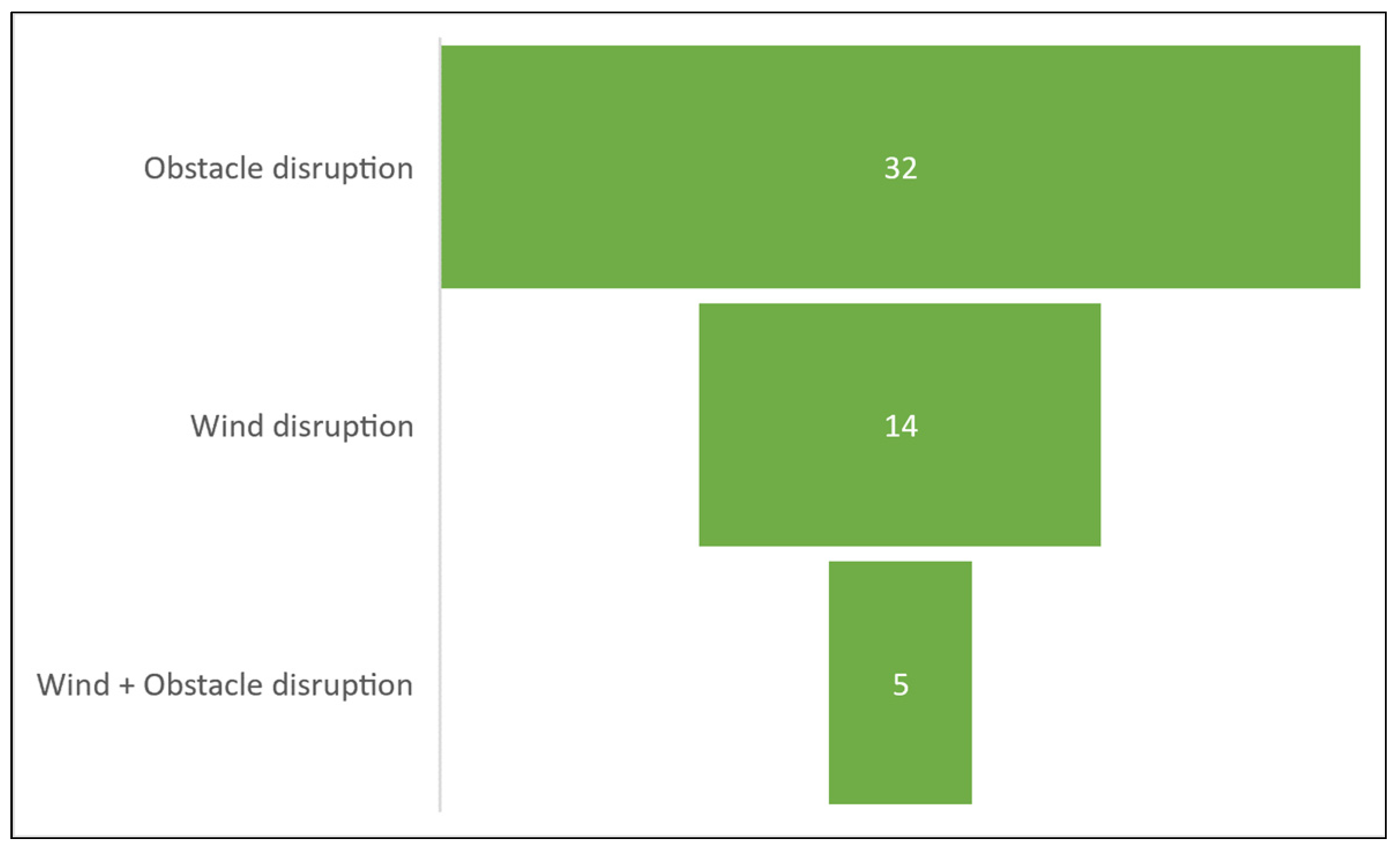
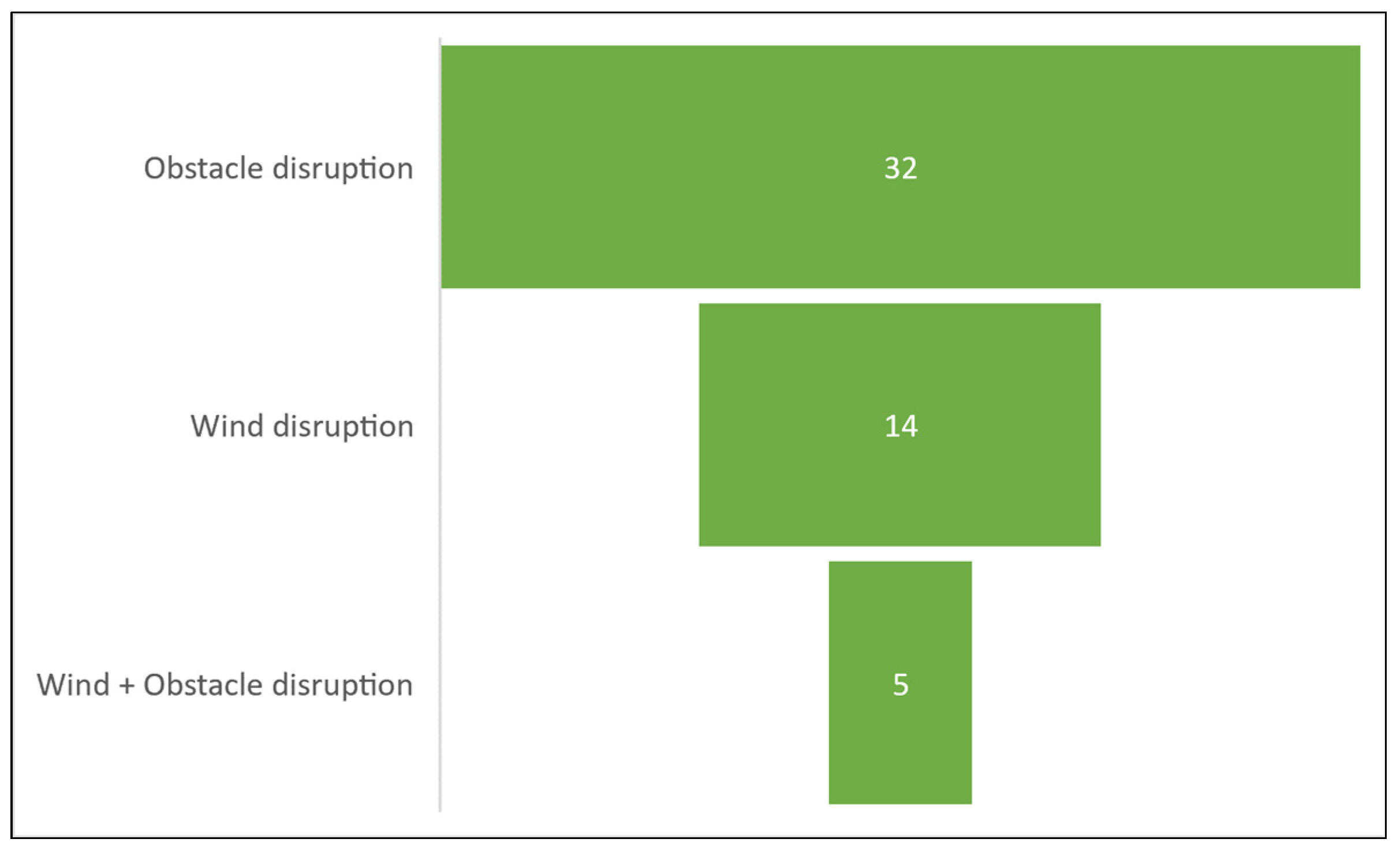
Figure 9.
Relevant research examined in the bibliometric analysis in [
26,
27] that categorizes disturbance simulations into three categories.
Figure 9.
Relevant research examined in the bibliometric analysis in [
26,
27] that categorizes disturbance simulations into three categories.
Figure 10.
Scenario 1.1: visually represents wind force modeling over a grid-based ROI.
Figure 10.
Scenario 1.1: visually represents wind force modeling over a grid-based ROI.
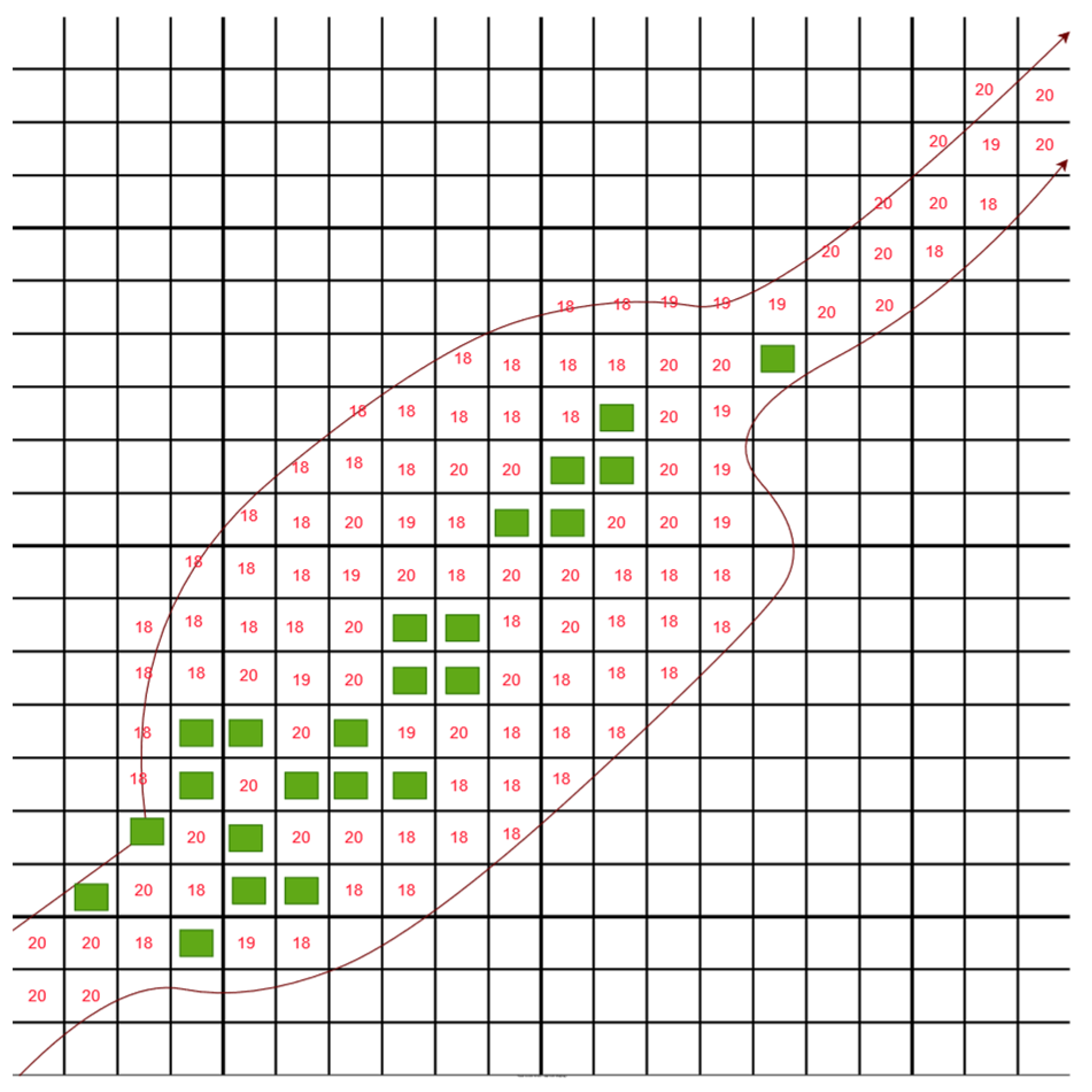
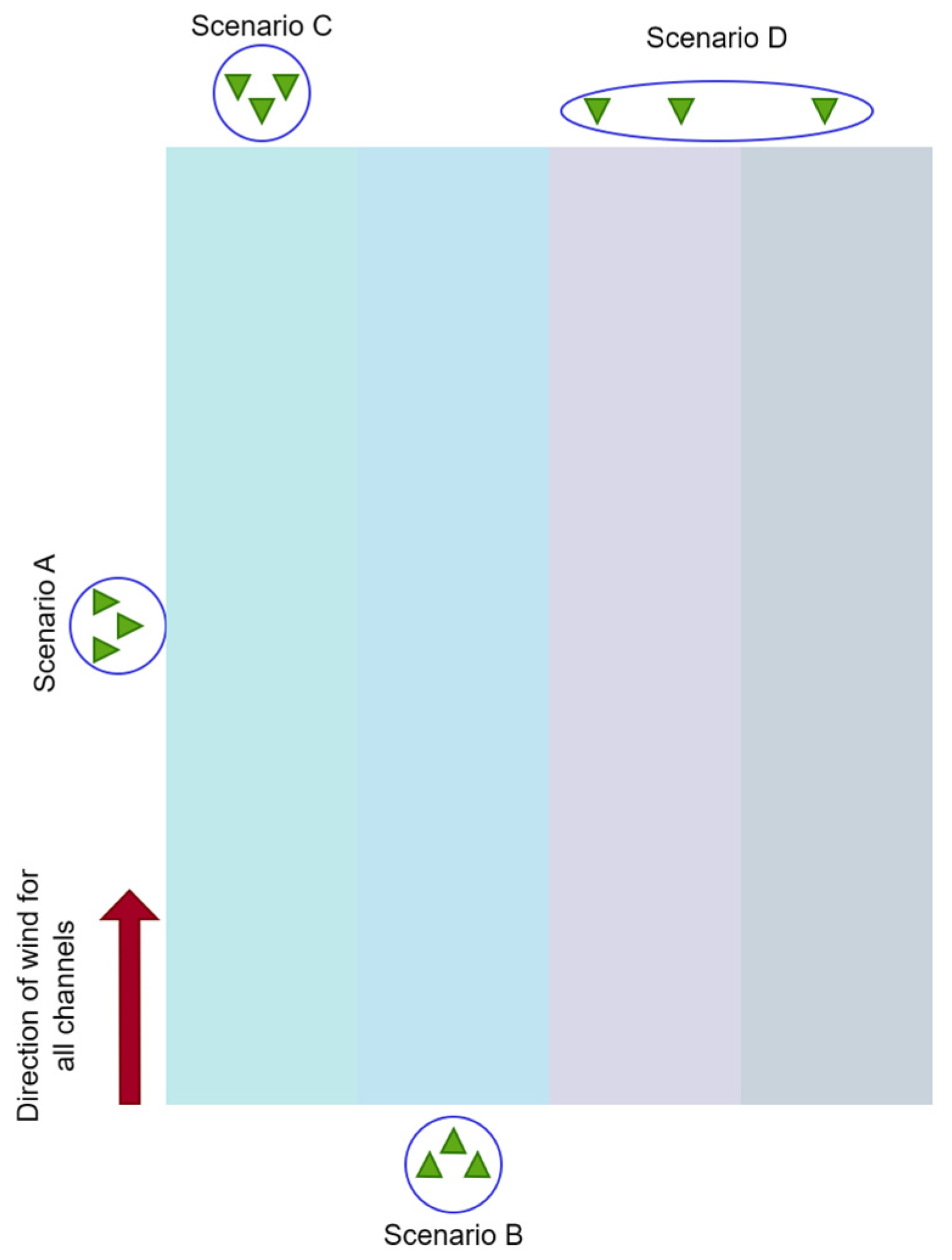
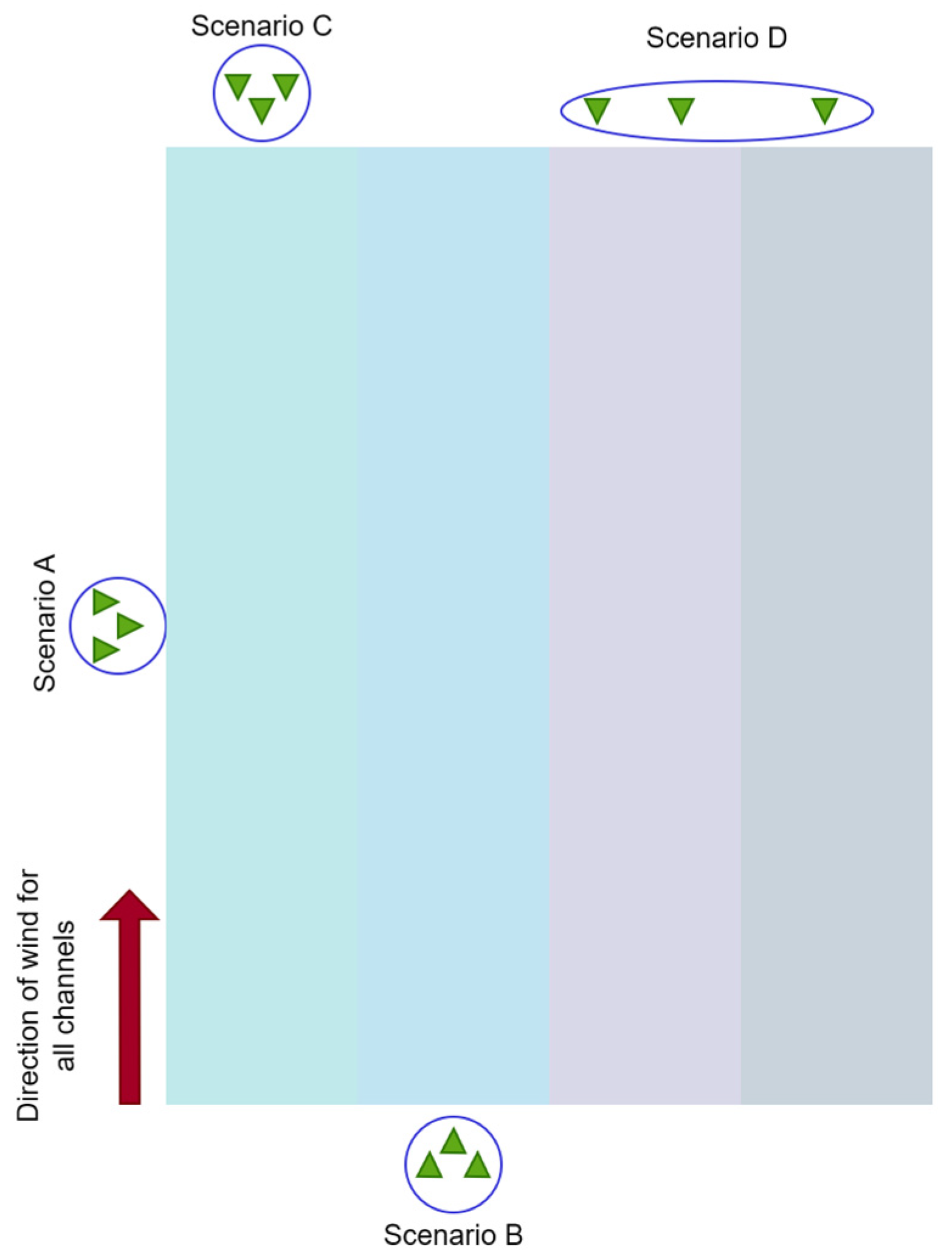
Figure 11.
Scenario 1.1: a 2D grid ROI with wind values and obstacles, showing a sample channel scenario.
Figure 11.
Scenario 1.1: a 2D grid ROI with wind values and obstacles, showing a sample channel scenario.
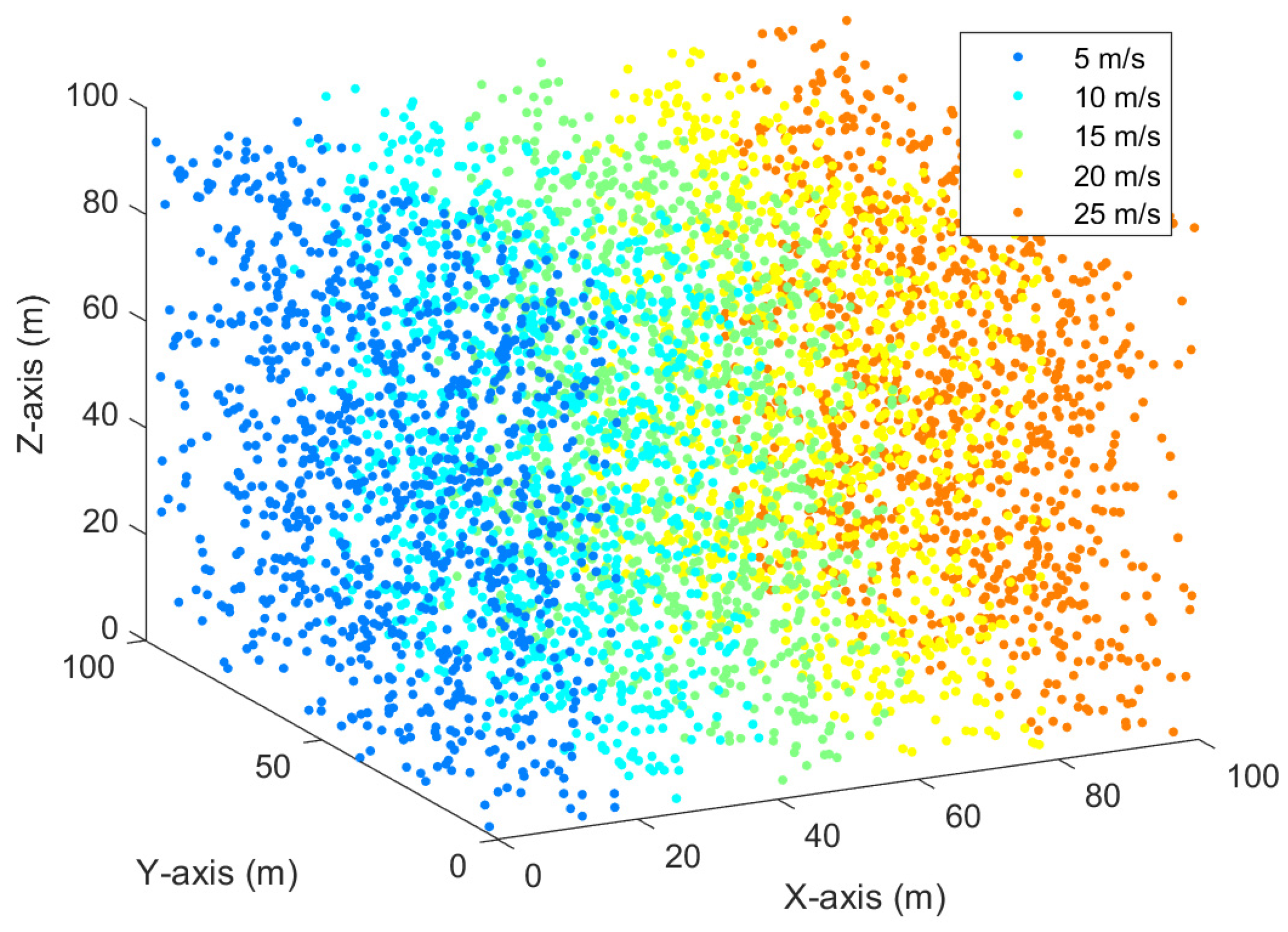
Figure 12.
Scenario 1.2: a 3D channel-based wind grid with different wind speeds.
Figure 12.
Scenario 1.2: a 3D channel-based wind grid with different wind speeds.
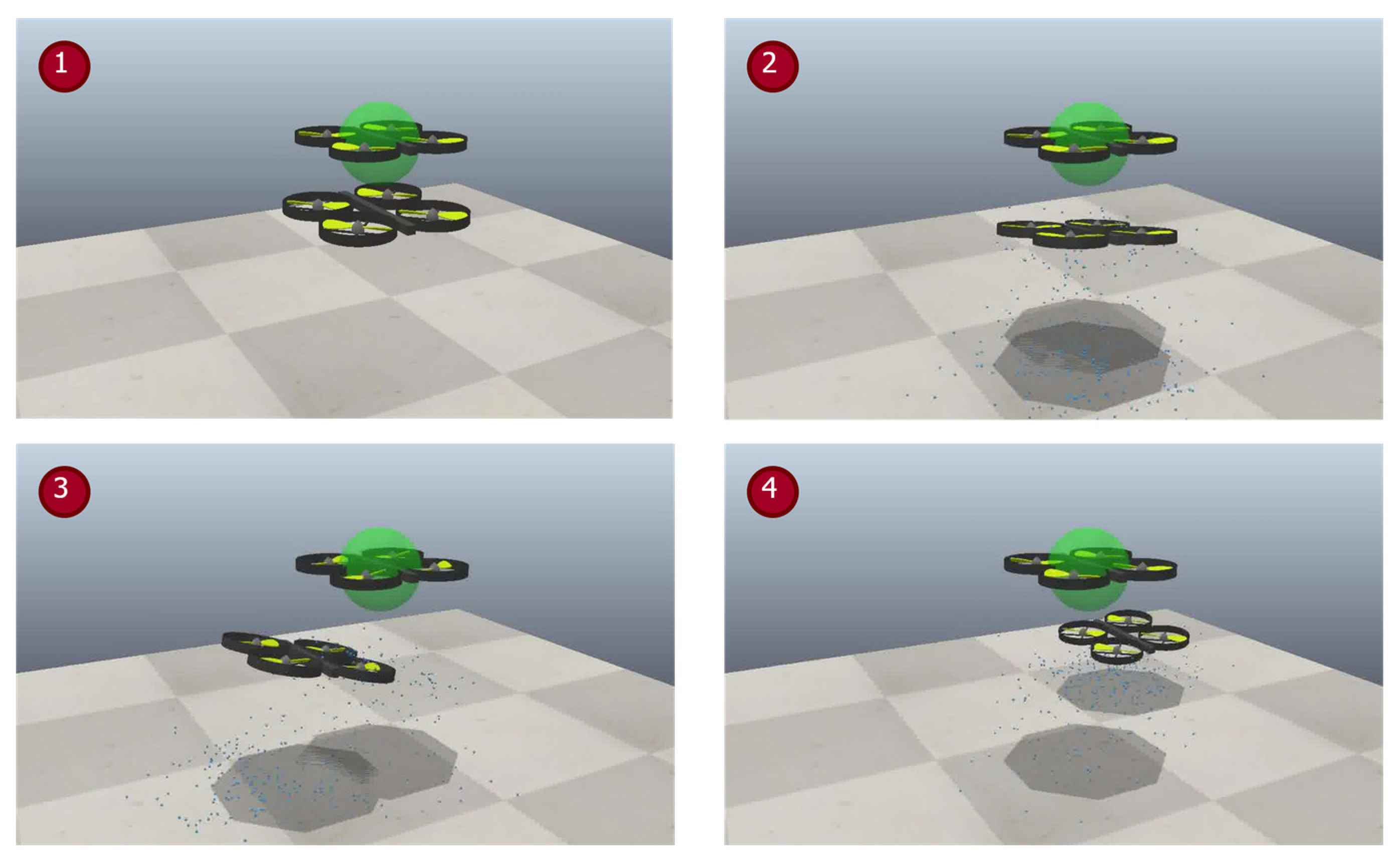
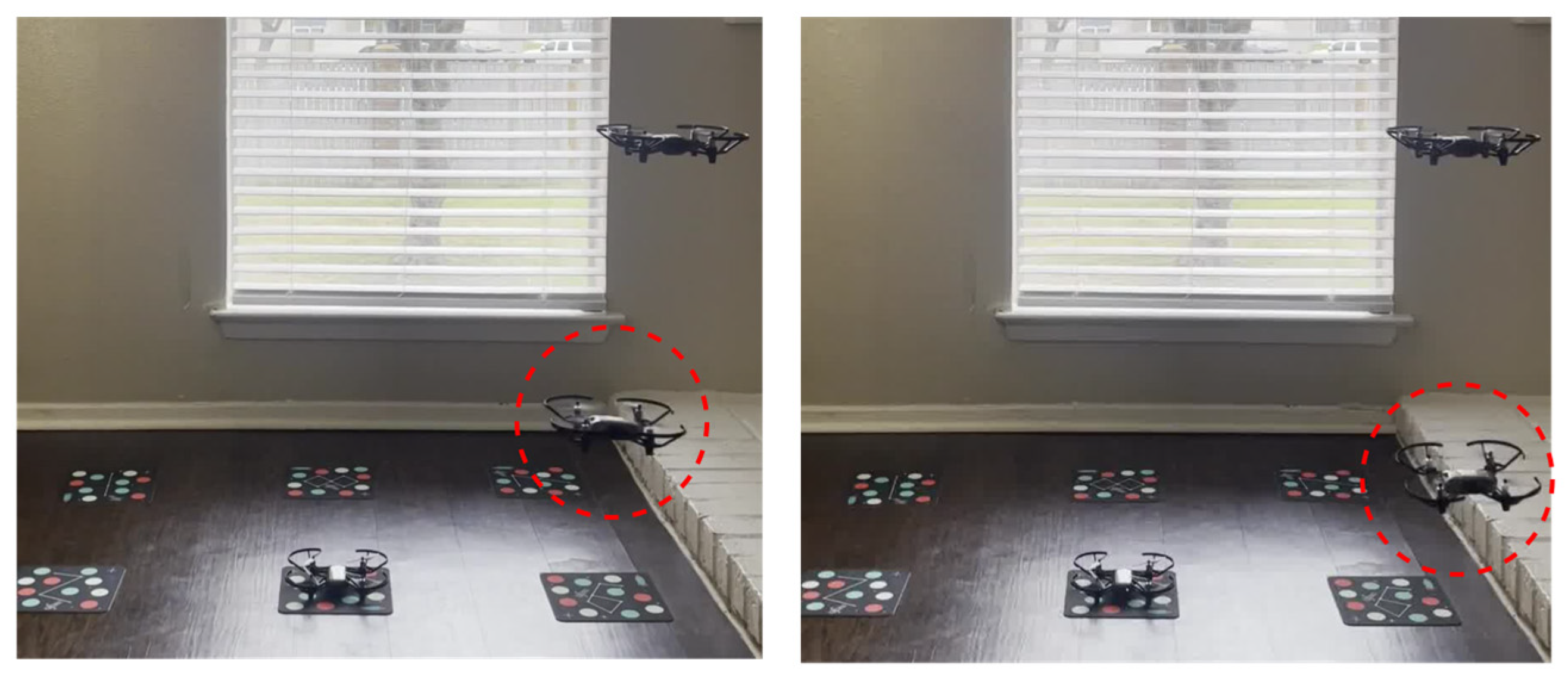
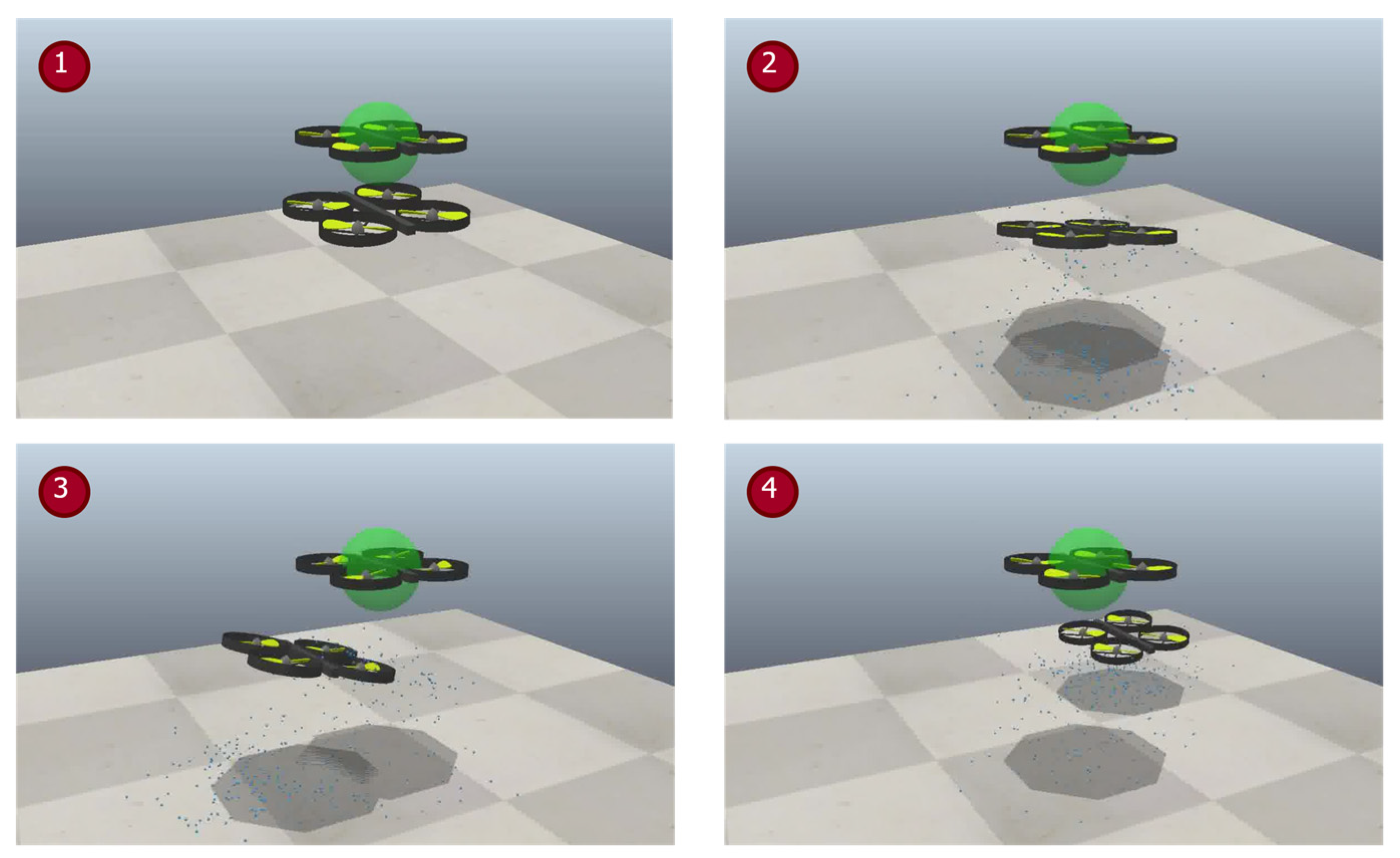
Figure 13.
Scenario 1.3: downwash drift occurrence near agents in 3D simulation.
Figure 13.
Scenario 1.3: downwash drift occurrence near agents in 3D simulation.
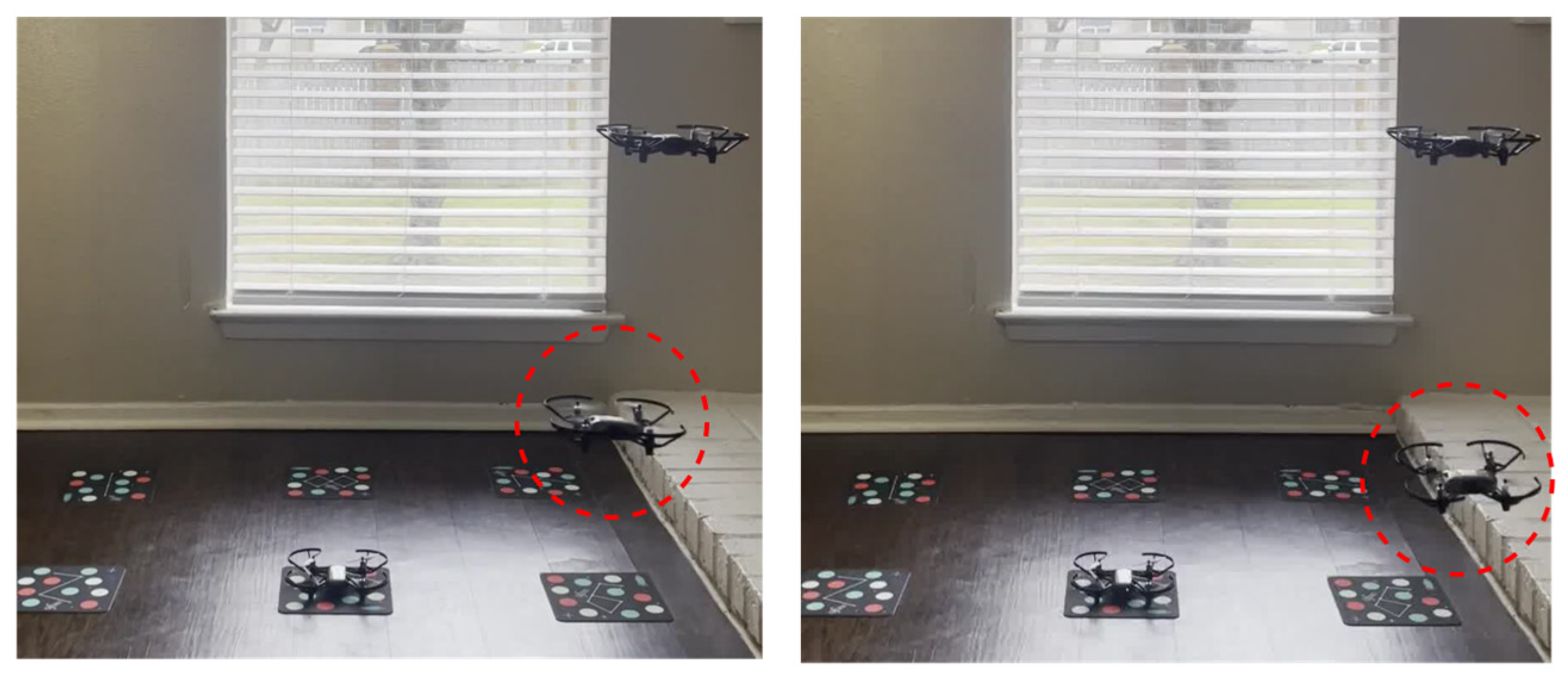
Figure 14.
Downwash drift occurrence in agents in close proximity in the real world.
Figure 14.
Downwash drift occurrence in agents in close proximity in the real world.
Figure 15.
Scenario 2.1: five agents are moving in 3D space for maximum area coverage in the presence of multiple obstacles.
Figure 15.
Scenario 2.1: five agents are moving in 3D space for maximum area coverage in the presence of multiple obstacles.
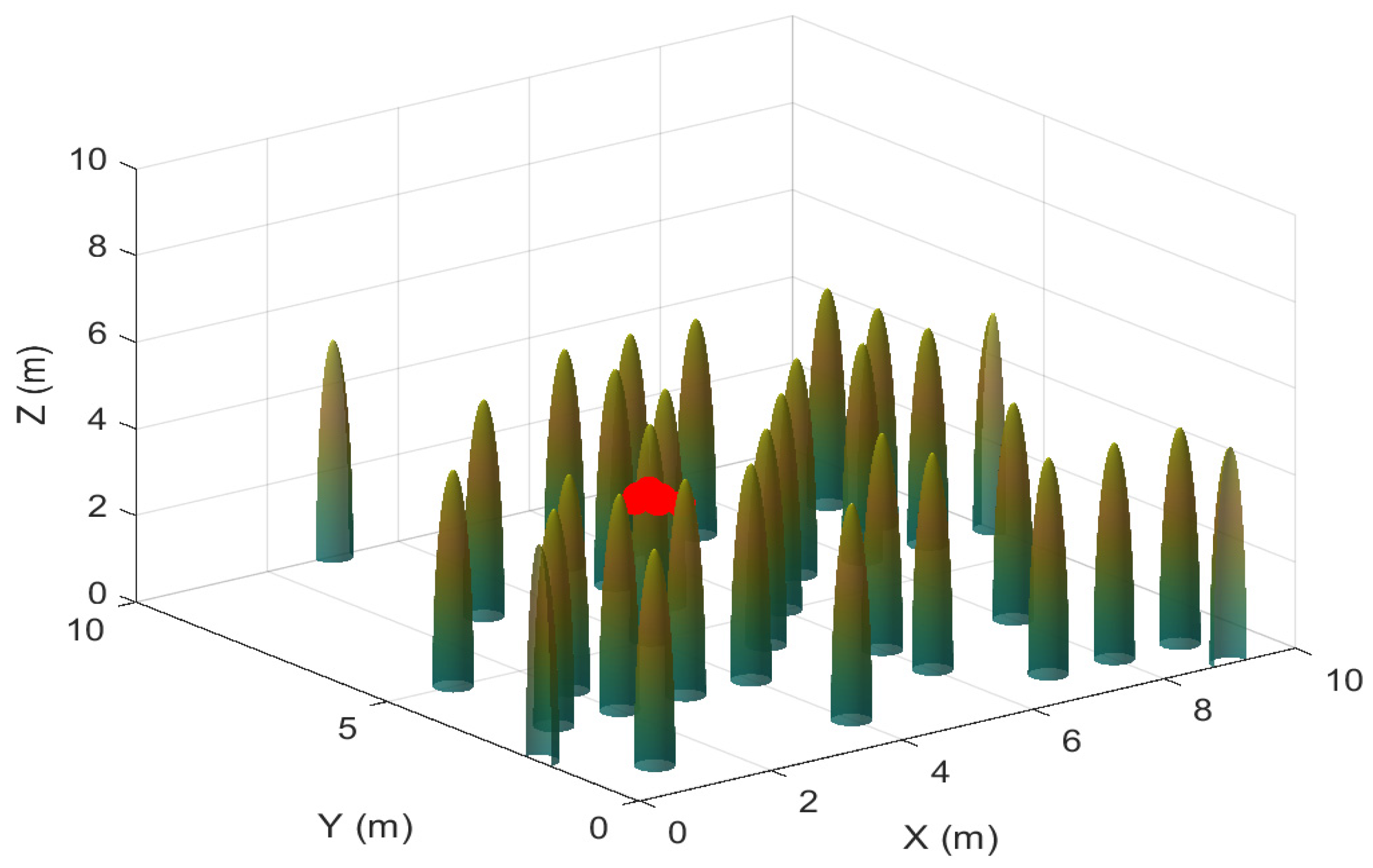
Figure 16.
Scenario 2.2 is a 3D simulation map with Gielis cones for obstacles.
Figure 16.
Scenario 2.2 is a 3D simulation map with Gielis cones for obstacles.
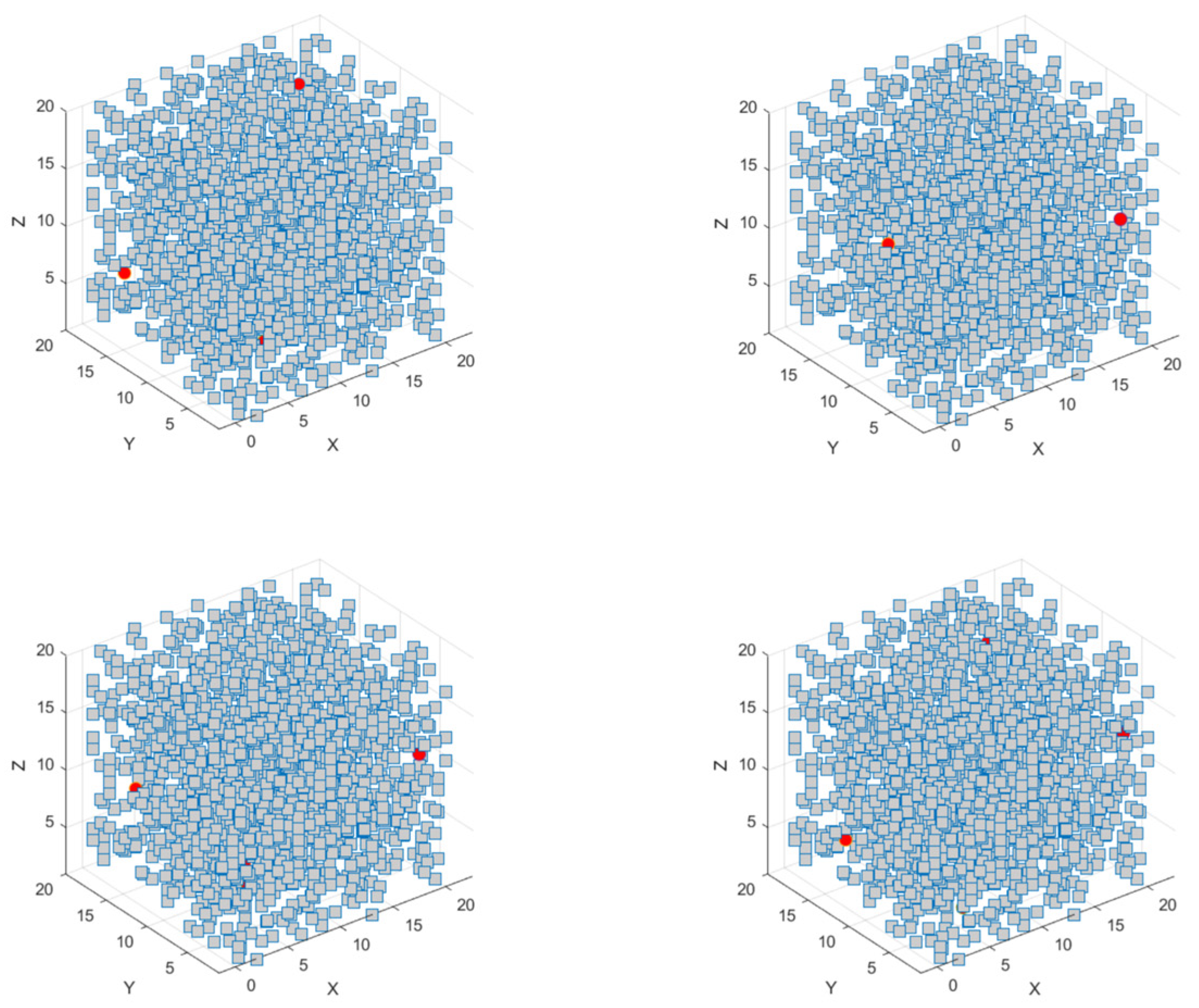
Figure 17.
Scenario 2.3 is a top-down view of a 3D simulation environment with a varied number of obstacles.
Figure 17.
Scenario 2.3 is a top-down view of a 3D simulation environment with a varied number of obstacles.
Figure 18.
Experiment 1: UAV paths in the presence of wind and obstacles.
Figure 18.
Experiment 1: UAV paths in the presence of wind and obstacles.
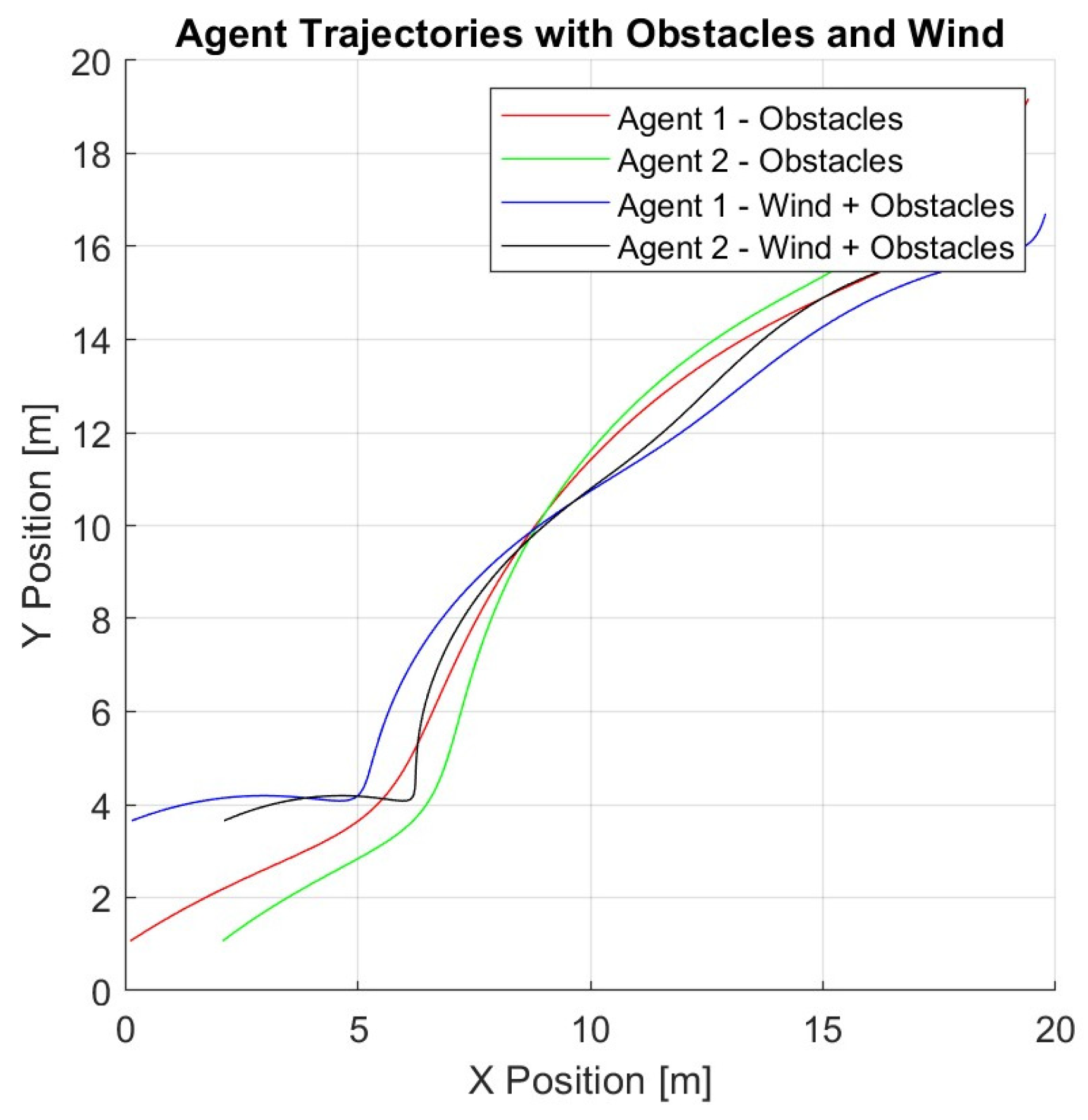
Figure 19.
Changes in trajectories when the same agents 1 and 2 are exposed to wind and obstacles.
Figure 19.
Changes in trajectories when the same agents 1 and 2 are exposed to wind and obstacles.
Figure 20.
Path and trajectory deviation in 2D for a single agent on a smaller scale position.
Figure 20.
Path and trajectory deviation in 2D for a single agent on a smaller scale position.
Figure 21.
Scenario 1.2: planning using wind channels and agent placement.
Figure 21.
Scenario 1.2: planning using wind channels and agent placement.
Figure 22.
Scenario 1.2 examines cohesion and agent performance using SwarmLab with wind constraints.
Figure 22.
Scenario 1.2 examines cohesion and agent performance using SwarmLab with wind constraints.
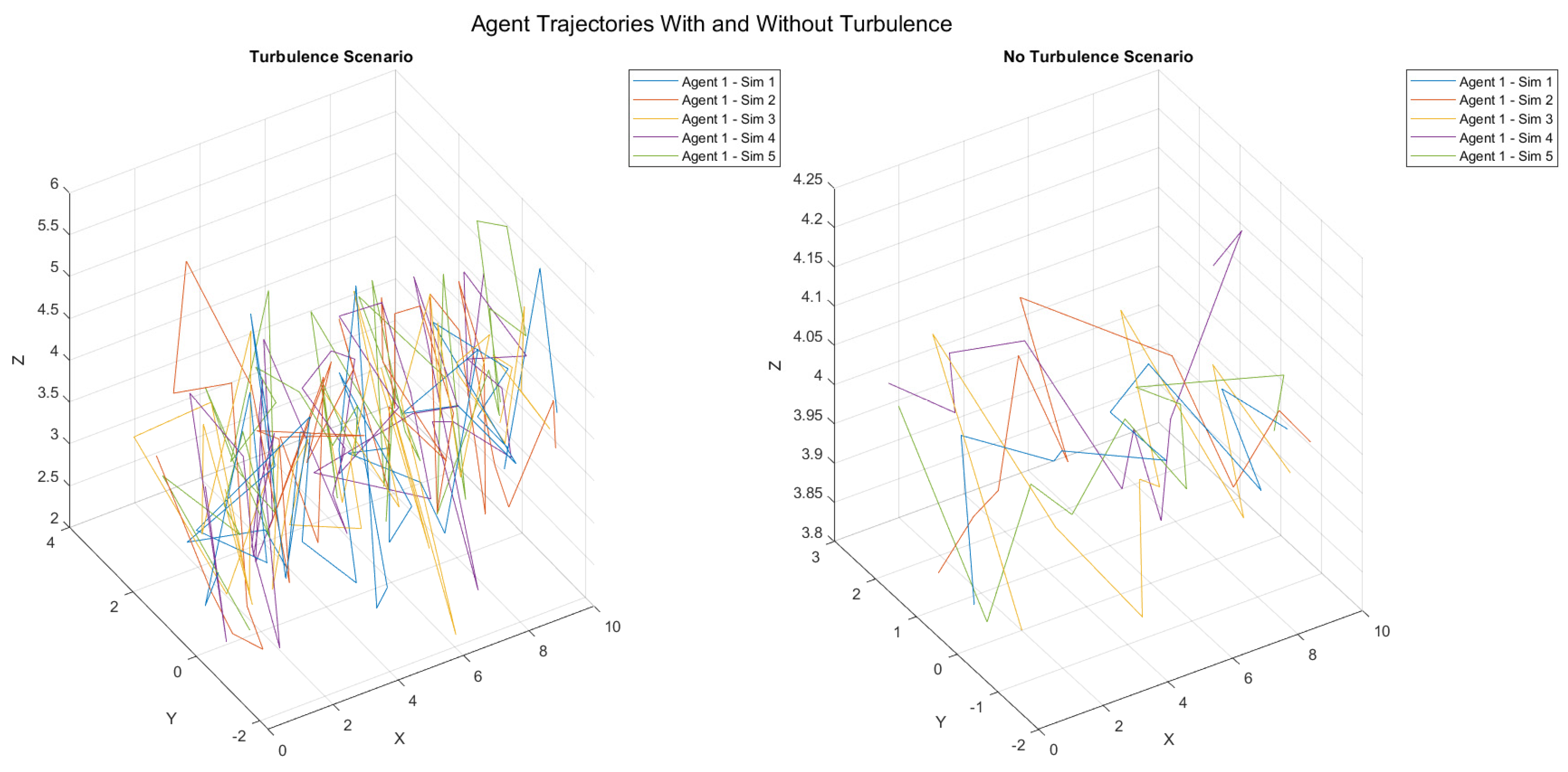
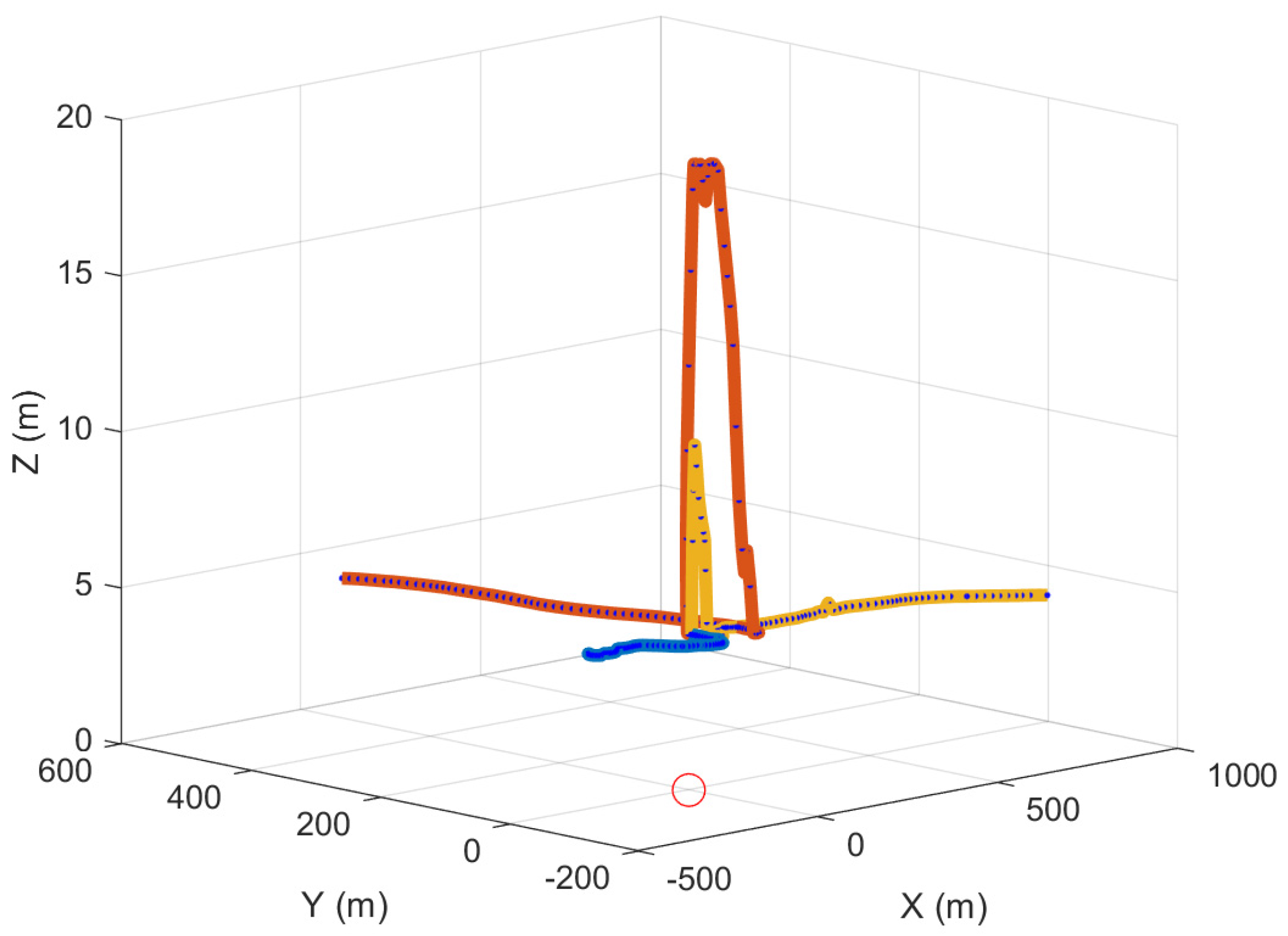
Figure 23.
Experiment 2 using Scenario 2.2: the path traveled by a single agent in turbulence and no-turbulence scenarios (five iterations).
Figure 23.
Experiment 2 using Scenario 2.2: the path traveled by a single agent in turbulence and no-turbulence scenarios (five iterations).
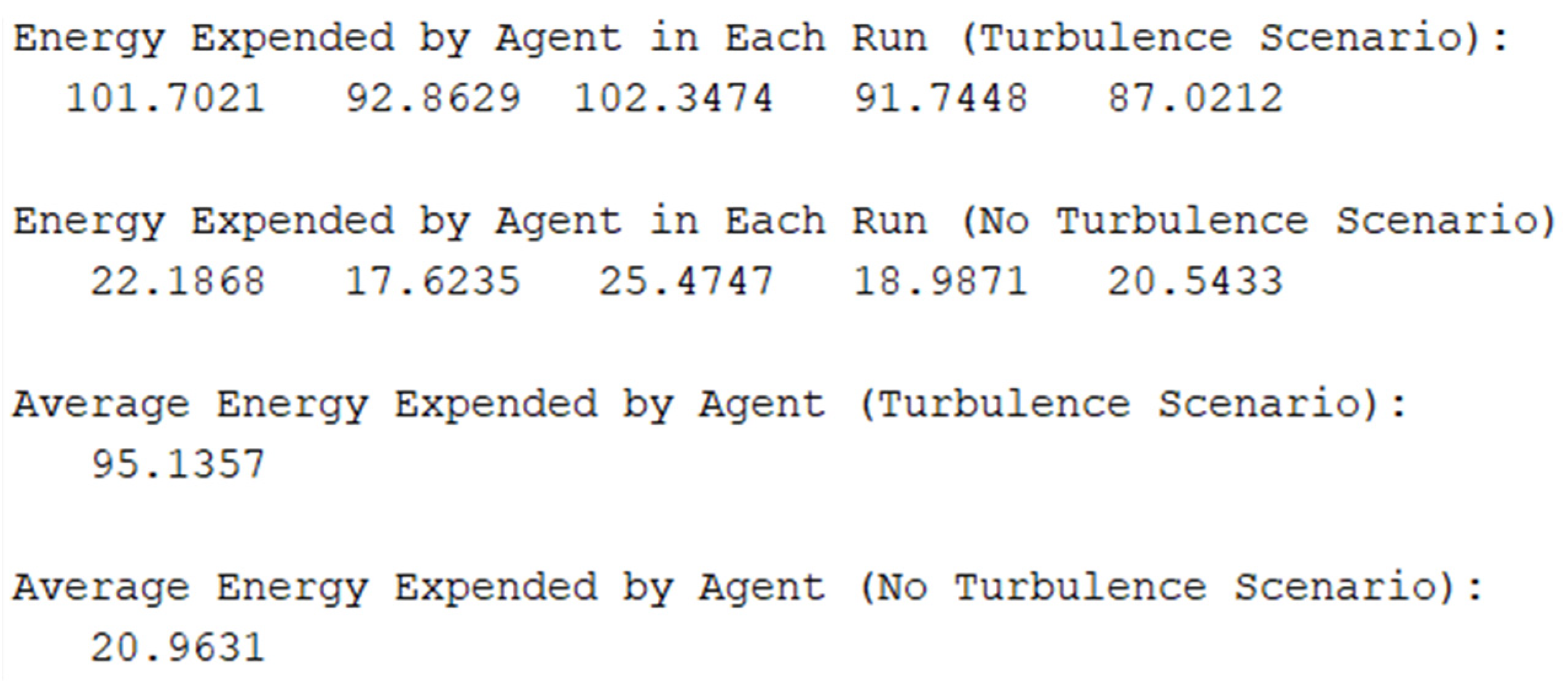
Figure 24.
Experiment 2, Scenario 2.2: energy expenditure for the above agent for each iteration and average energy consumed over the total number of iterations.
Figure 24.
Experiment 2, Scenario 2.2: energy expenditure for the above agent for each iteration and average energy consumed over the total number of iterations.
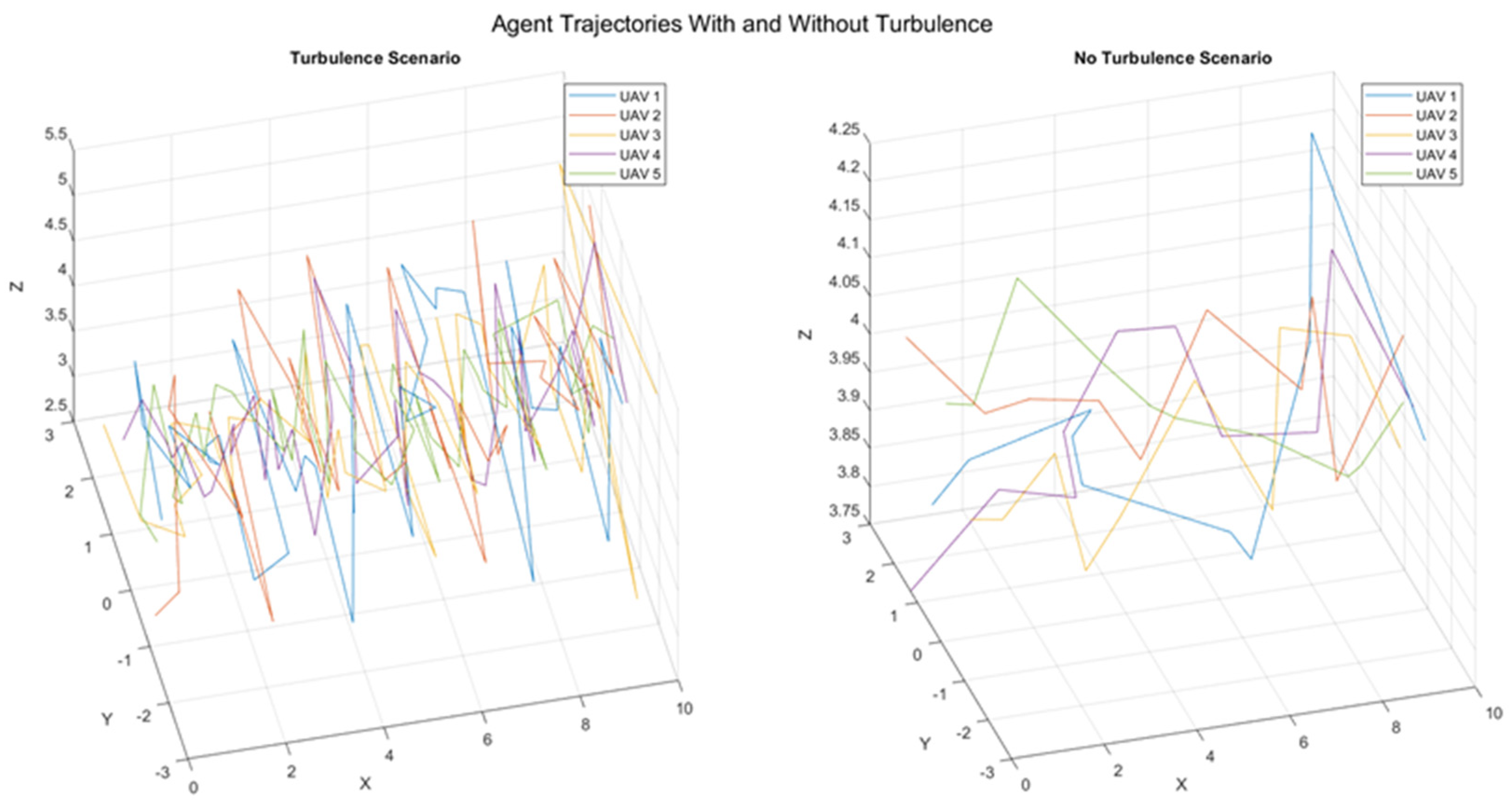
Figure 25.
Experiment 2, Scenario 2.2: paths traveled by five agents in turbulence and no turbulence scenario (one iteration).
Figure 25.
Experiment 2, Scenario 2.2: paths traveled by five agents in turbulence and no turbulence scenario (one iteration).
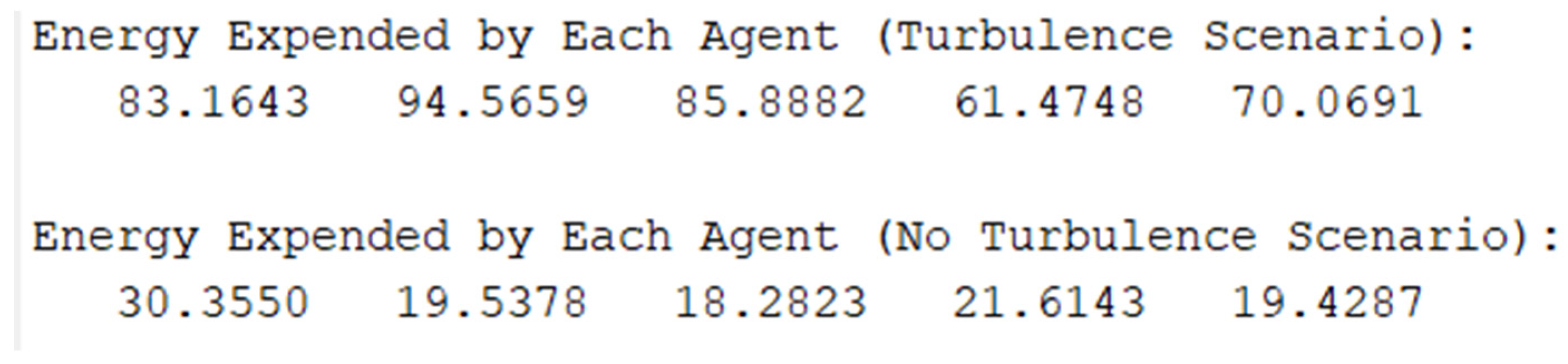
Figure 26.
Experiment 2, Scenario 2.2: energy expenditure for each agent for the single iteration in turbulence and no-turbulence scenario.
Figure 26.
Experiment 2, Scenario 2.2: energy expenditure for each agent for the single iteration in turbulence and no-turbulence scenario.
Figure 27.
Experiment 3, Scenario 1.3: path deviation measured for lower UAV agent due to downwash from the upper agent.
Figure 27.
Experiment 3, Scenario 1.3: path deviation measured for lower UAV agent due to downwash from the upper agent.
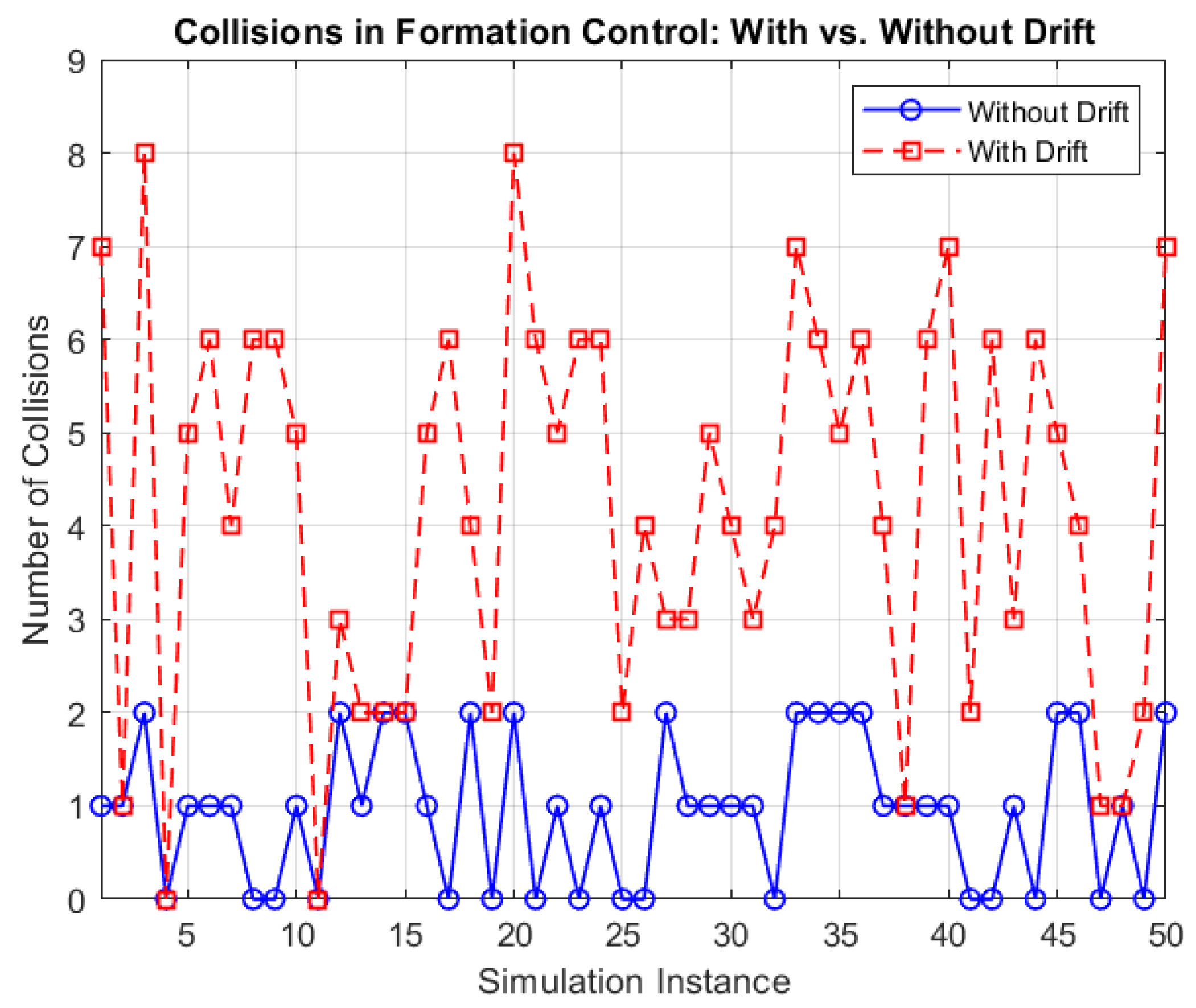
Figure 28.
Experiment 3, Scenario 1.3: the number of collisions during swarm movement when drift effects are considered.
Figure 28.
Experiment 3, Scenario 1.3: the number of collisions during swarm movement when drift effects are considered.
Figure 29.
Scenario 2.1: the relationship between area coverage by agent and probability of obstacle being present at next generated point.
Figure 29.
Scenario 2.1: the relationship between area coverage by agent and probability of obstacle being present at next generated point.
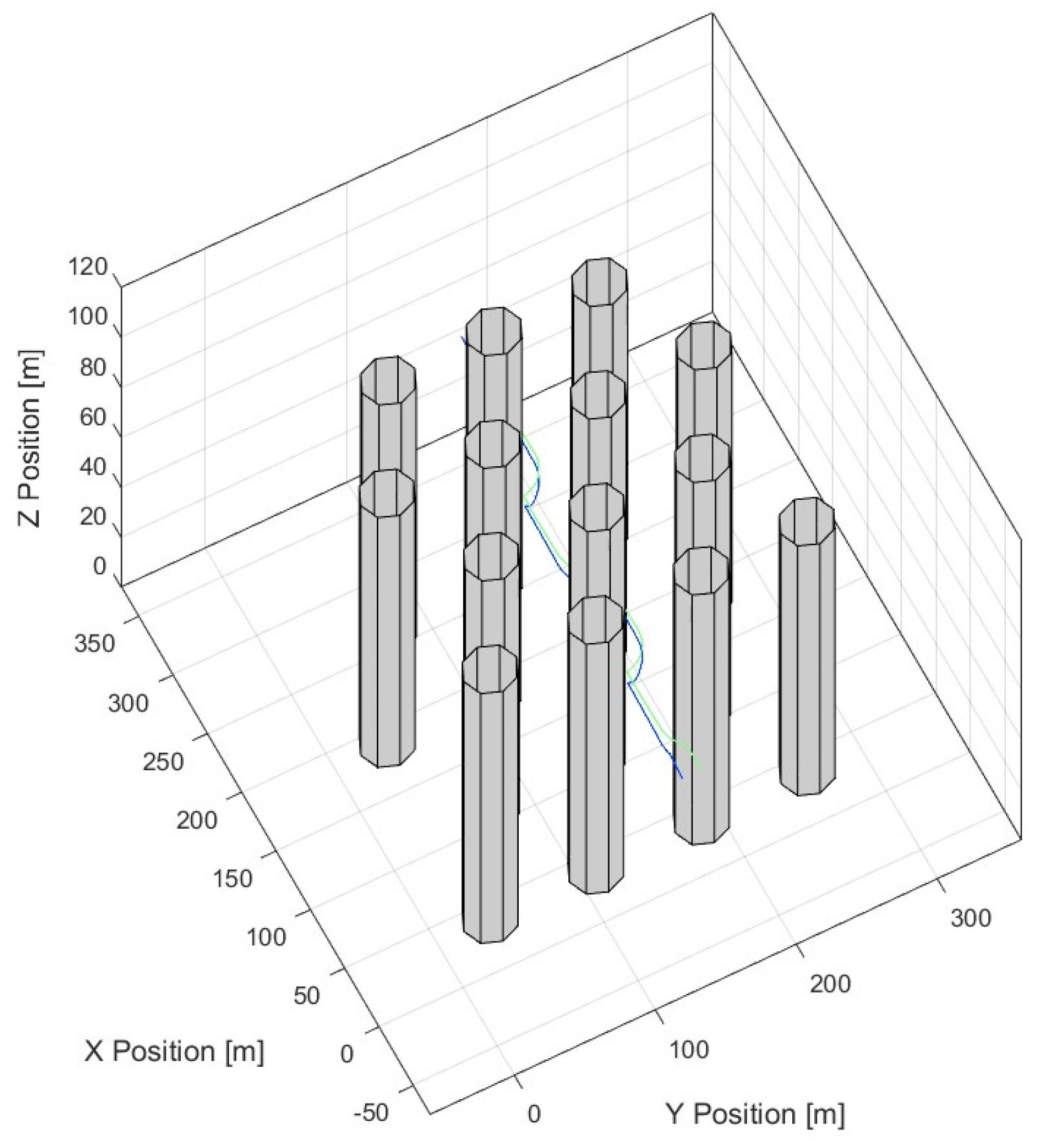
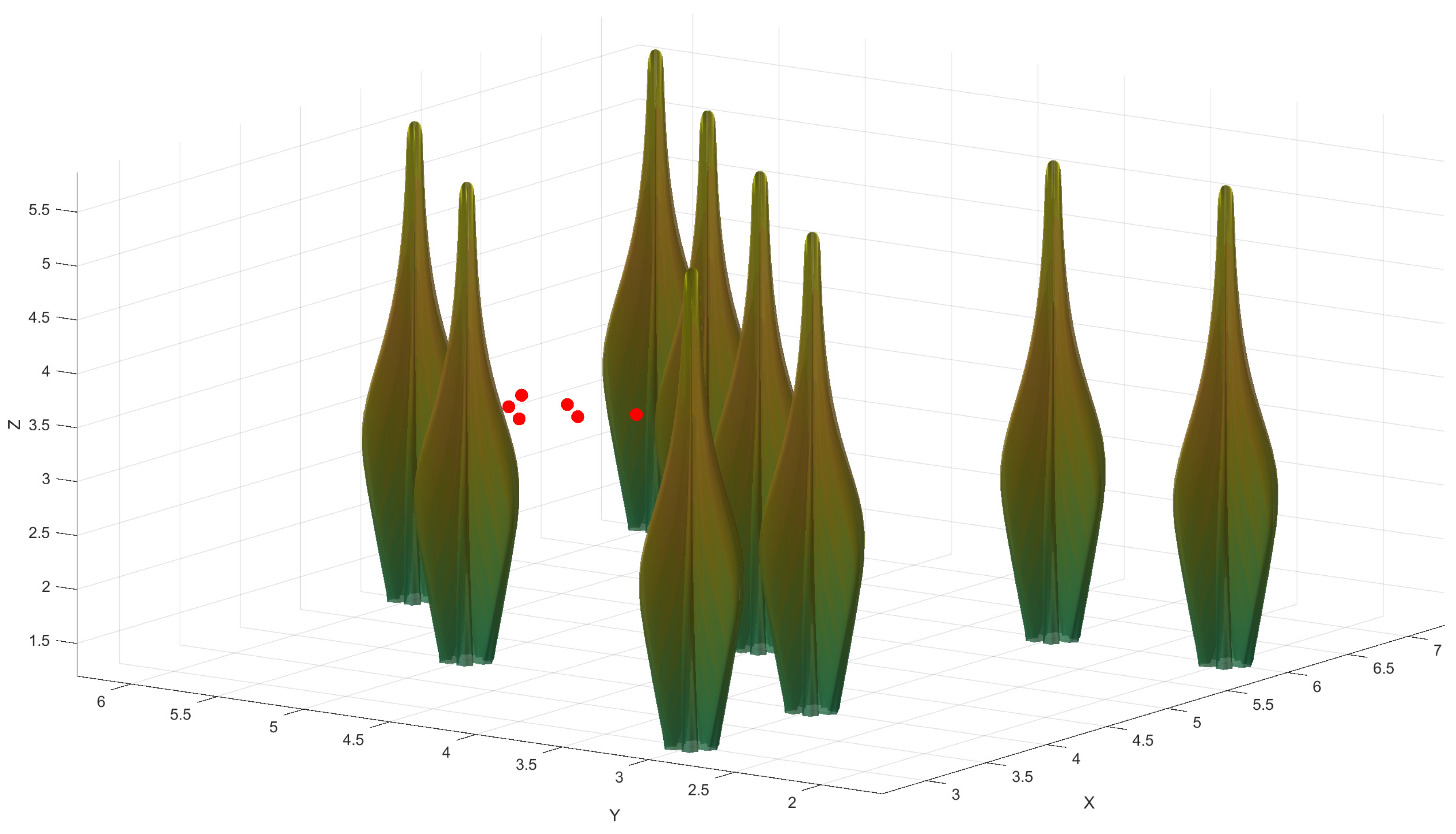
Figure 30.
A variation of Experiment 5 that has implemented Scenario 2.2 only: agents are moving in 3D environments populated with sparse complex obstacles.
Figure 30.
A variation of Experiment 5 that has implemented Scenario 2.2 only: agents are moving in 3D environments populated with sparse complex obstacles.
Figure 31.
Fragmentation phenomenon observed in simulations with concave surfaces over those with simpler obstacle geometry.
Figure 31.
Fragmentation phenomenon observed in simulations with concave surfaces over those with simpler obstacle geometry.
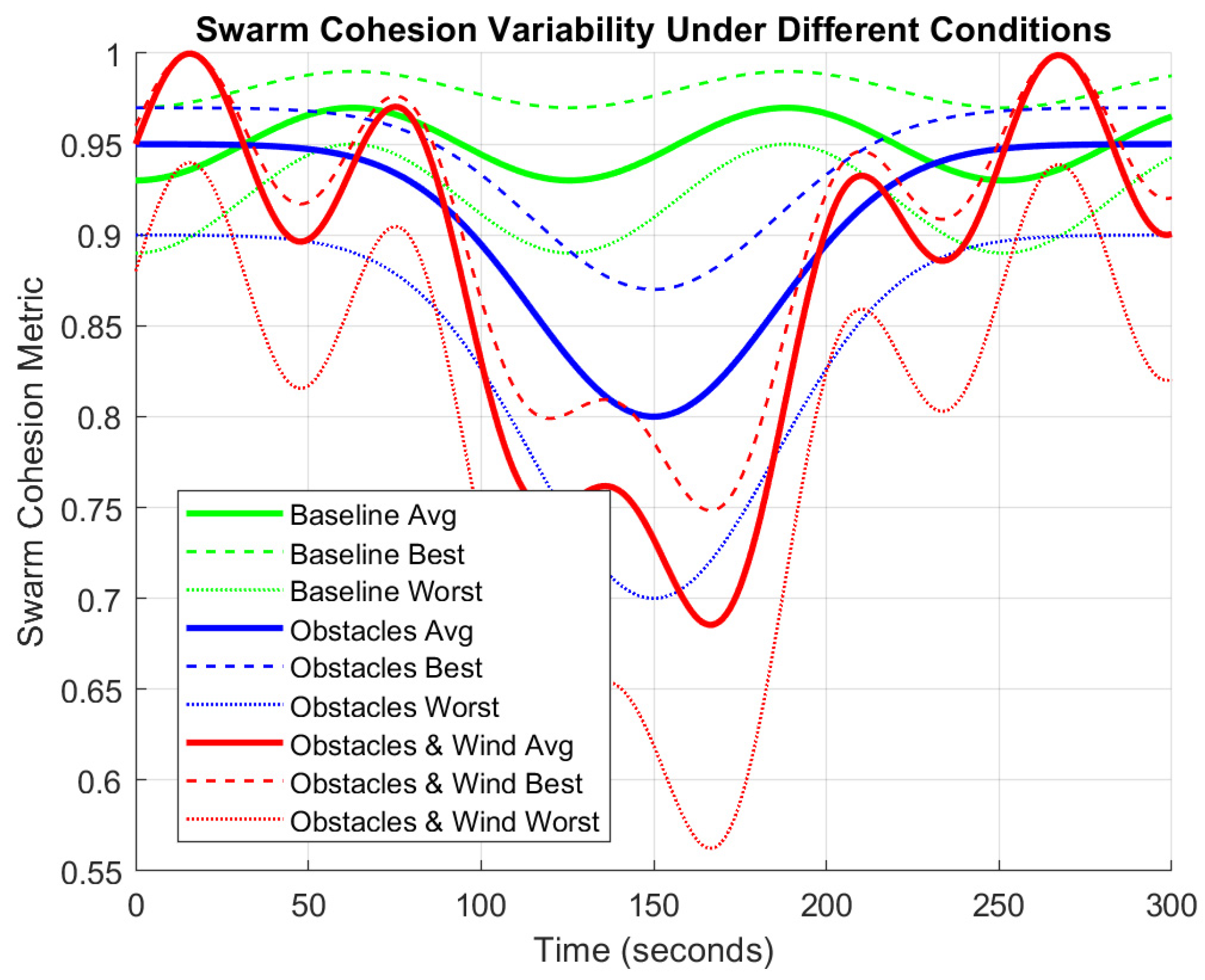
Figure 32.
Change in swarm cohesion values for various case scenarios in Experiment 5.2.
Figure 32.
Change in swarm cohesion values for various case scenarios in Experiment 5.2.
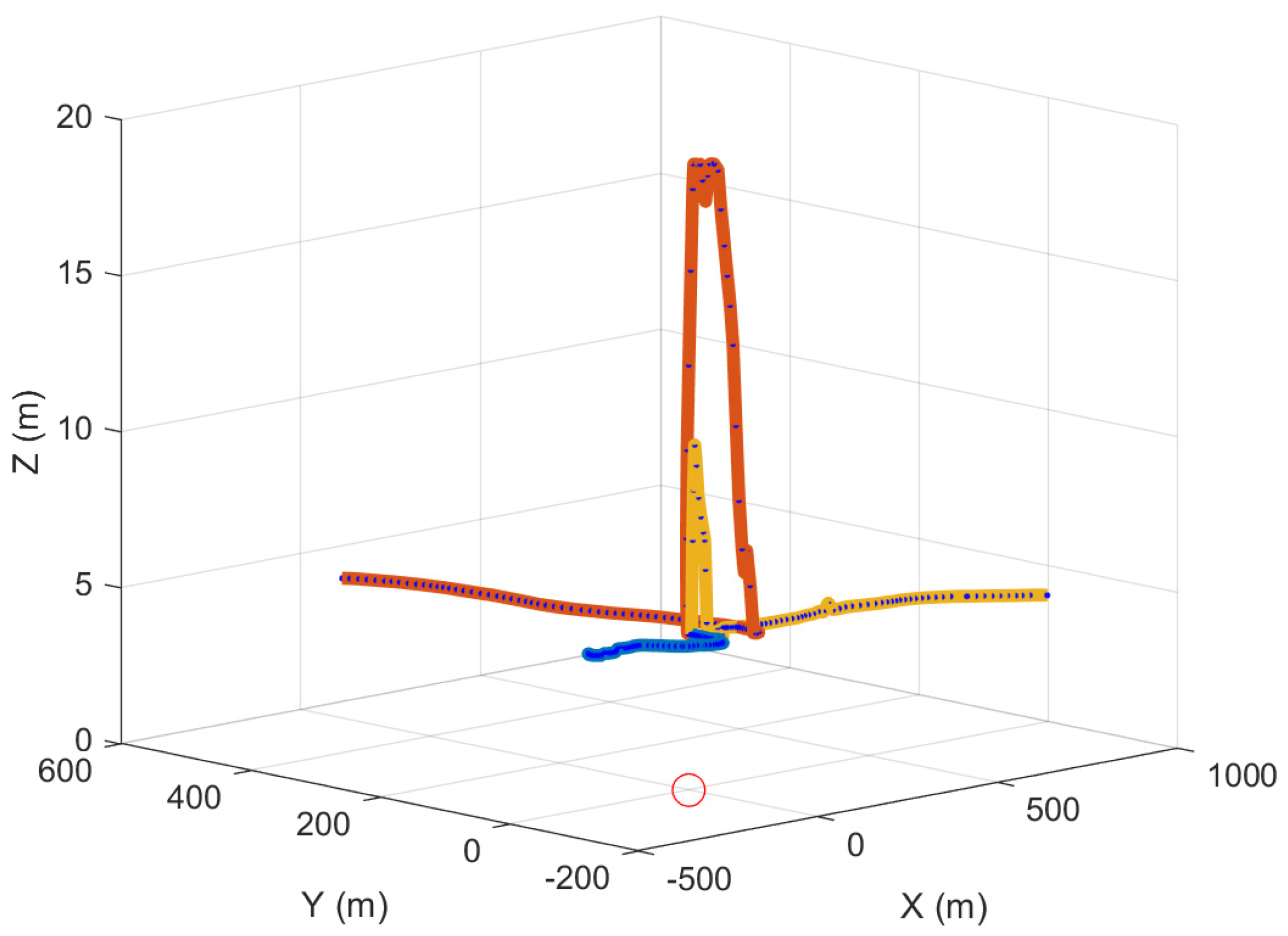
Figure 33.
Experiment 6: a dispersion action being tested for a three-vehicle swarm.
Figure 33.
Experiment 6: a dispersion action being tested for a three-vehicle swarm.
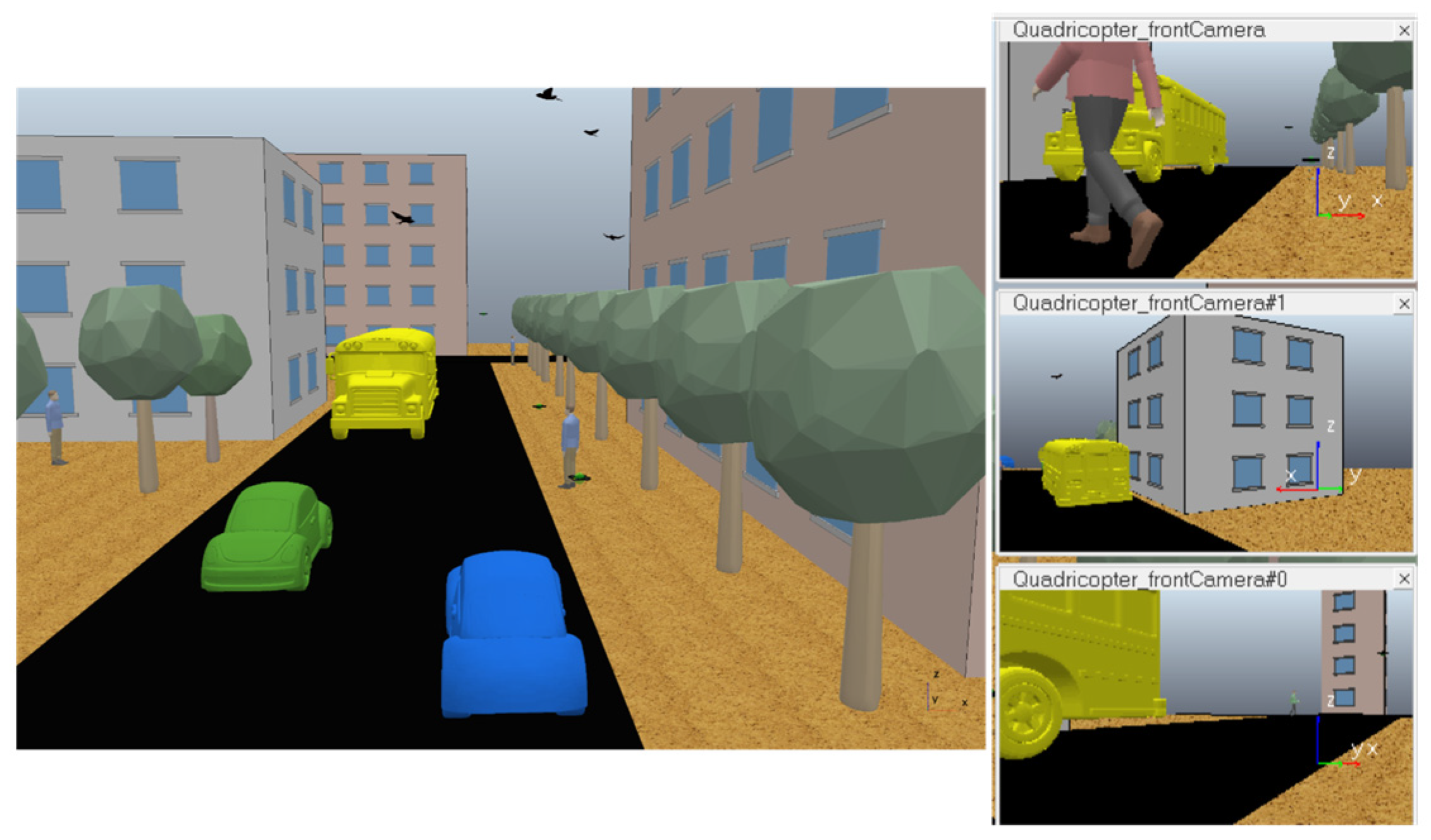
Figure 34.
Sectional scene viewpoint and multiple camera feeds of the agents moving in the simulated space.
Figure 34.
Sectional scene viewpoint and multiple camera feeds of the agents moving in the simulated space.
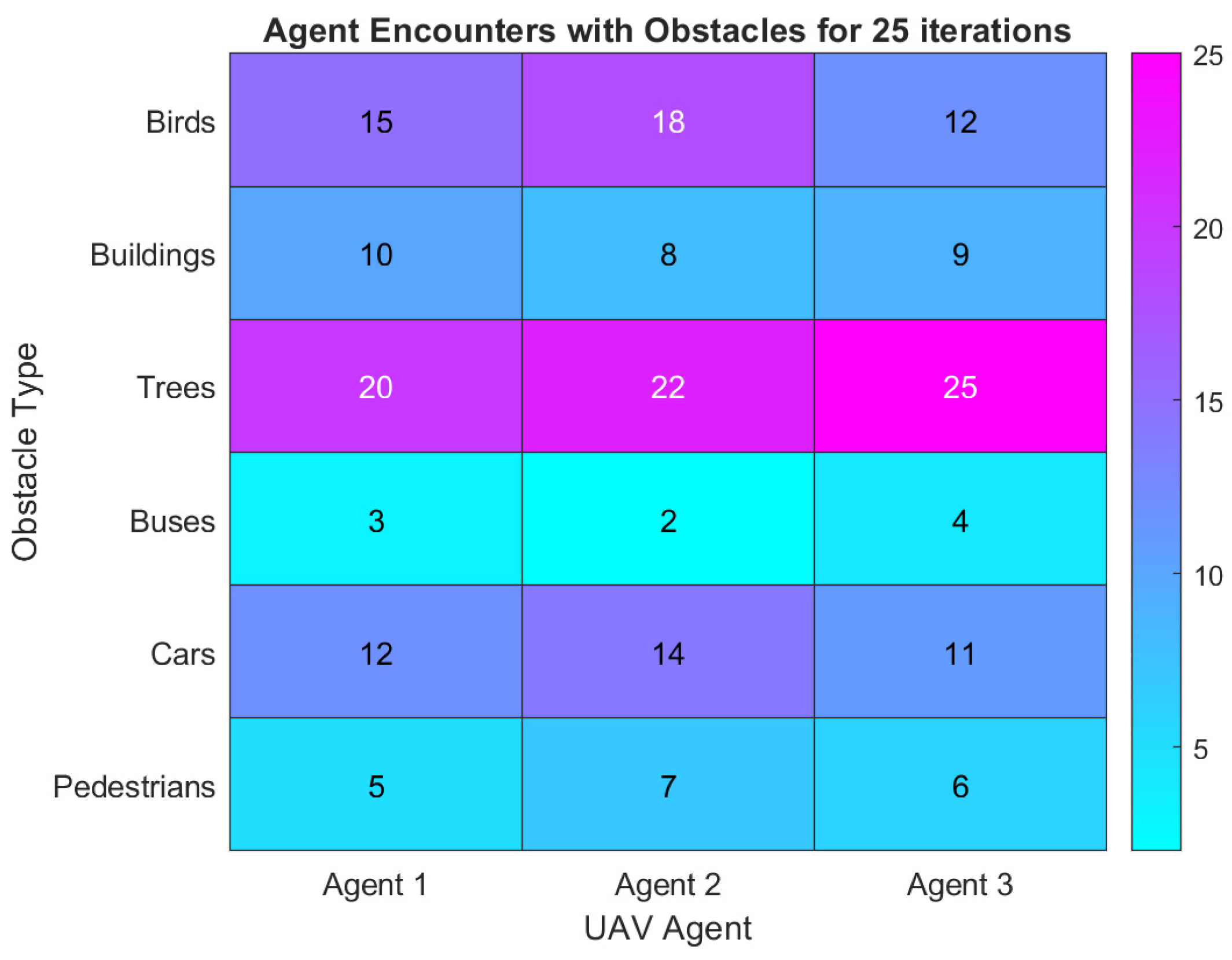
Figure 35.
Experiment 6 result plot showcasing the encounter rates of varied obstacles for a three-agent swarm over 25 experiment iterations.
Figure 35.
Experiment 6 result plot showcasing the encounter rates of varied obstacles for a three-agent swarm over 25 experiment iterations.
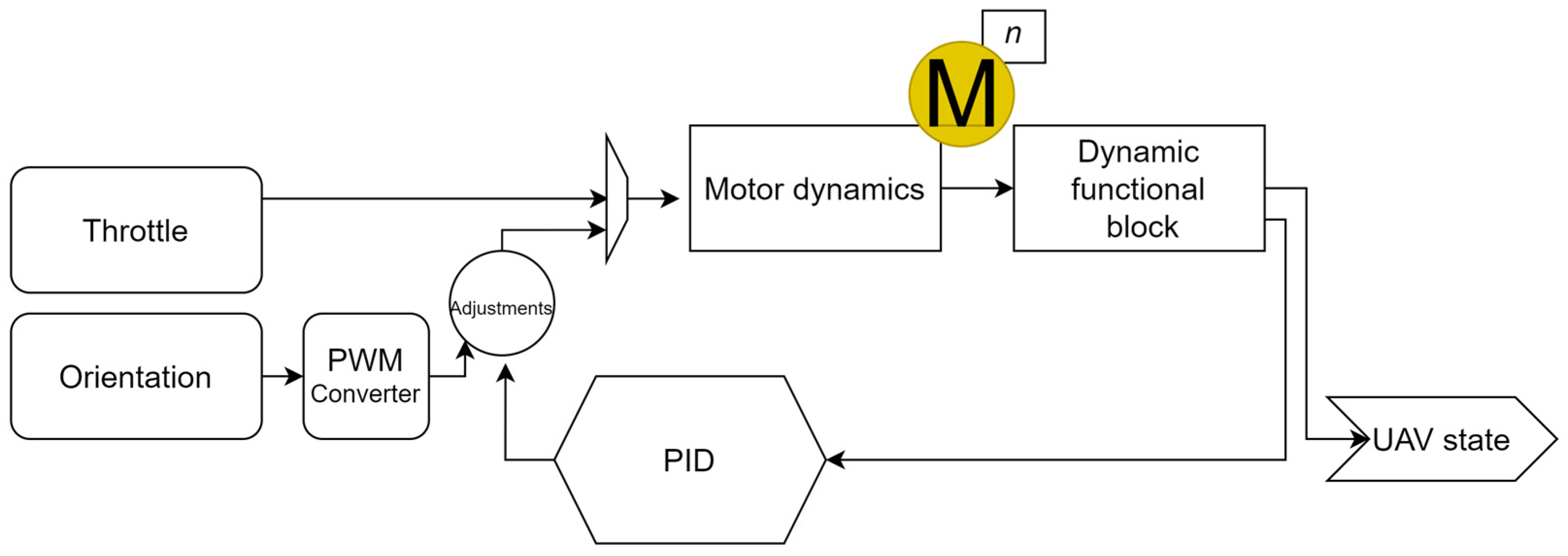
Figure 36.
A UAV block diagram focusing on motor dynamics and a variable number of motors.
Figure 36.
A UAV block diagram focusing on motor dynamics and a variable number of motors.
Figure 37.
A fault injection and observation process framework for a UAV in a simulation environment.
Figure 37.
A fault injection and observation process framework for a UAV in a simulation environment.
Figure 38.
An incident record of a faulty rotor during an RPM pose check before the agent takes off.
Figure 38.
An incident record of a faulty rotor during an RPM pose check before the agent takes off.
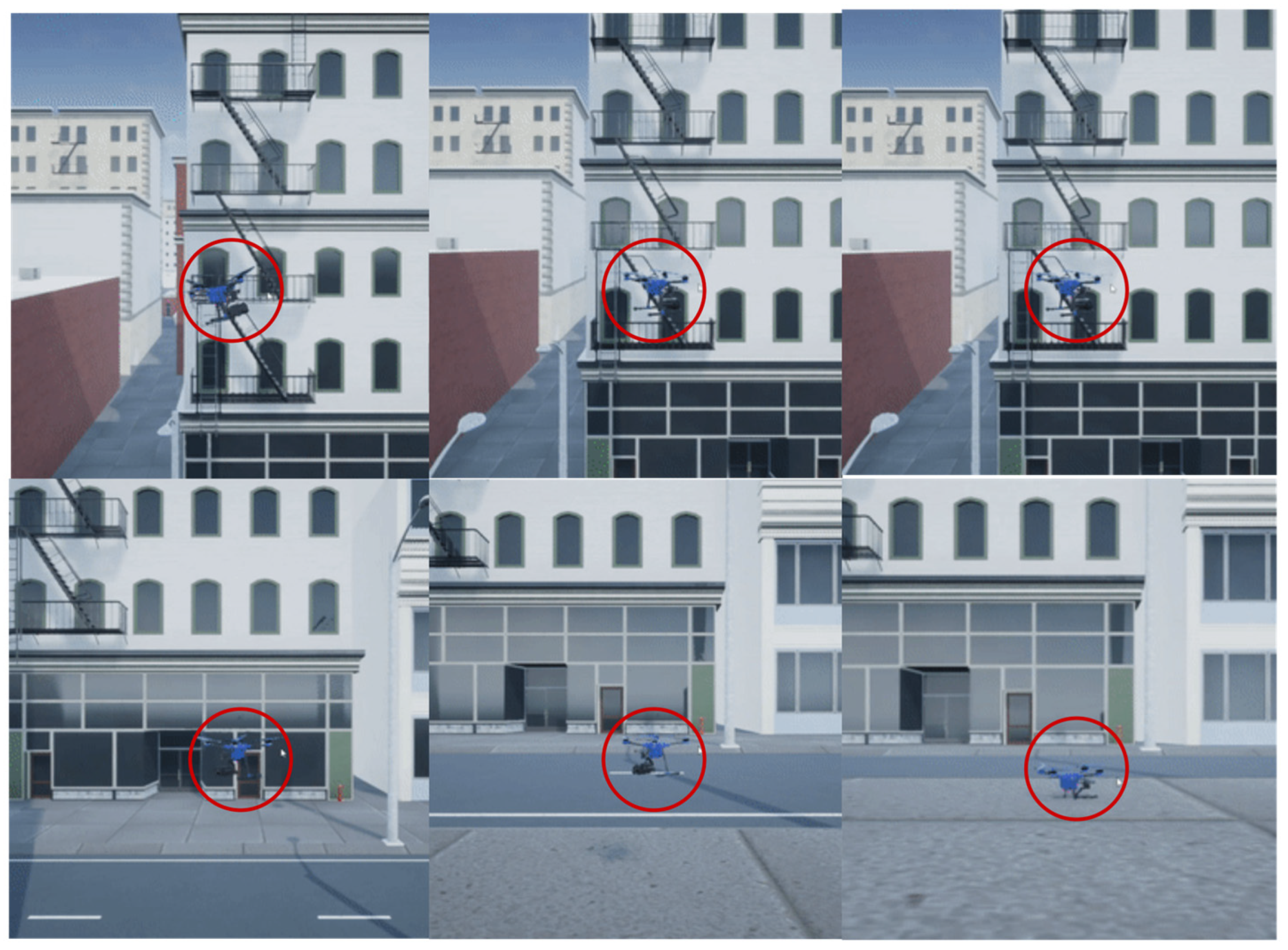
Figure 39.
The sequence of UAV landing events after a simulation of a rotor failing.
Figure 39.
The sequence of UAV landing events after a simulation of a rotor failing.
Figure 40.
A general process for simulation of network disturbances.
Figure 40.
A general process for simulation of network disturbances.
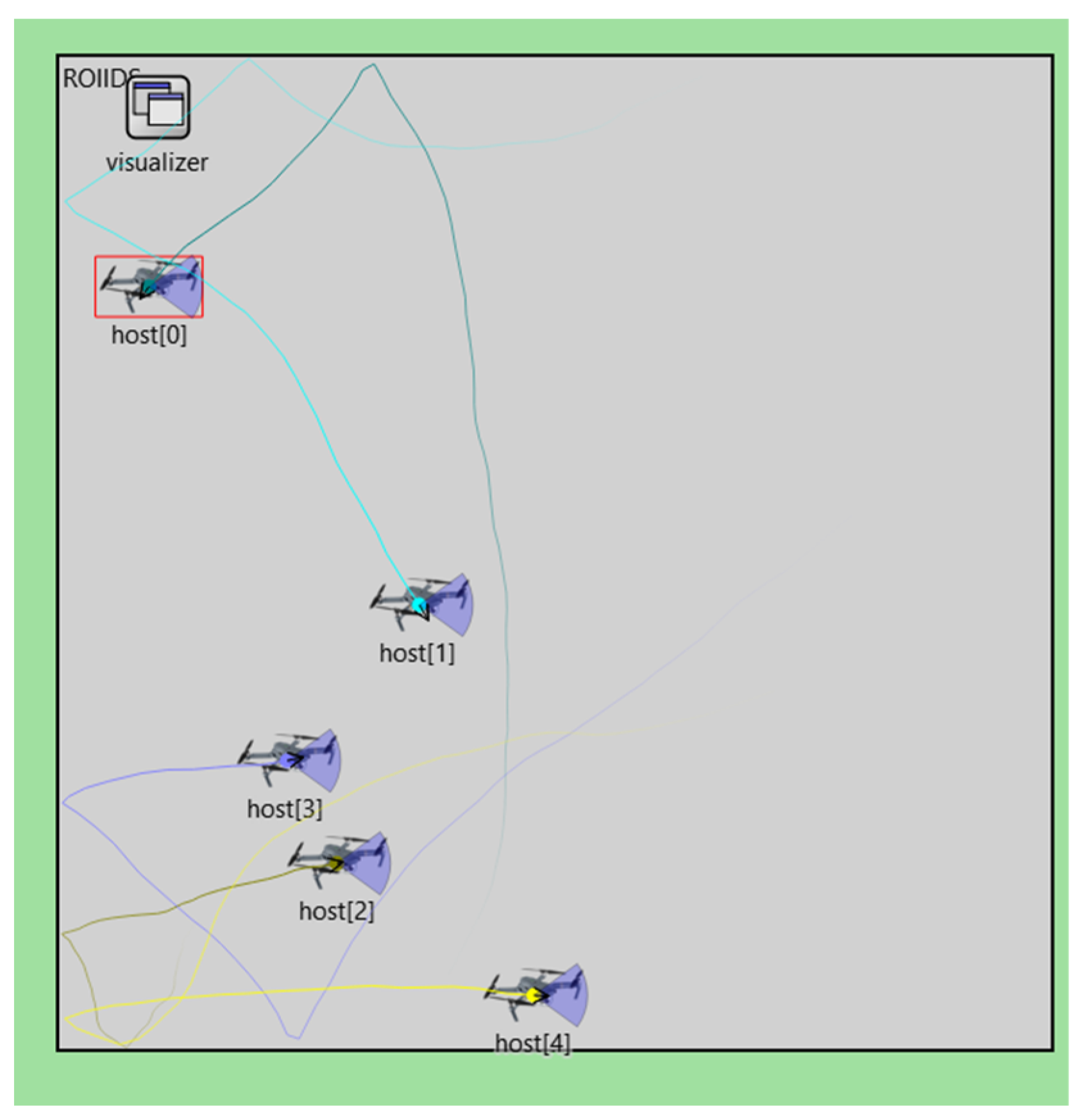
Figure 41.
OMNET++ implementation of mobile ROI and intrusion detection mission using five agents.
Figure 41.
OMNET++ implementation of mobile ROI and intrusion detection mission using five agents.
Figure 42.
Experiment results for ROI and intrusion detection study conducted in line with the proposed disruption methodology in
Figure 40.
Figure 42.
Experiment results for ROI and intrusion detection study conducted in line with the proposed disruption methodology in
Figure 40.
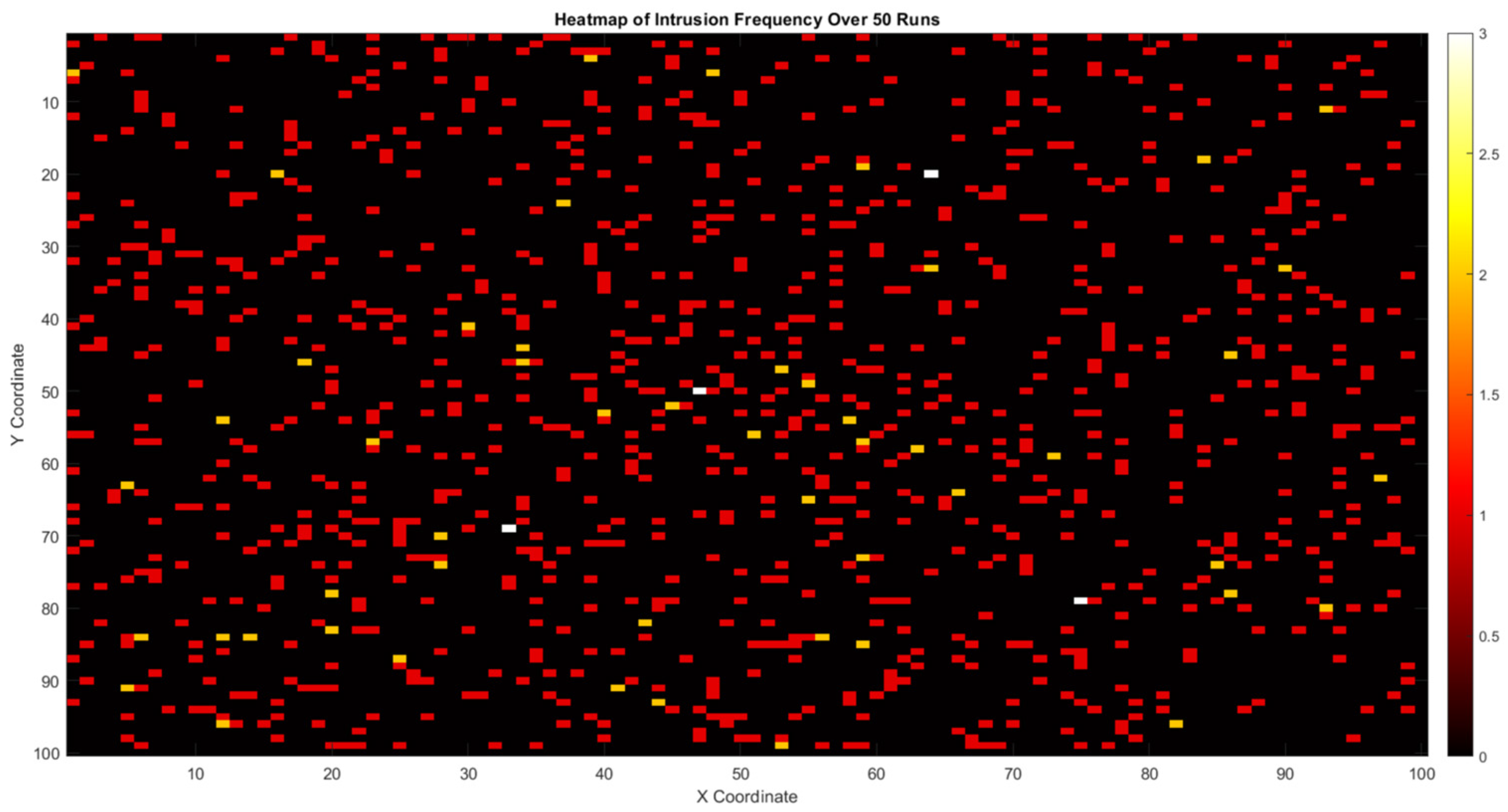
Figure 43.
Heatmap of intrusion records for the above conducted experiments.
Figure 43.
Heatmap of intrusion records for the above conducted experiments.
Table 1.
Relevant research incorporating wind models in swarm simulations.
Table 1.
Relevant research incorporating wind models in swarm simulations.
| Reference | Description |
|---|
| [17] | Studies the effect of wind on the connectivity and safety of a large-scale swarm. |
| [16] | Analyze the impacts of wind speed, direction, and turbulence on sUAS (Small Unoccupied Aircraft System). |
| [18] | Novel APF-based path planning technique for following GMTs (Ground Moving Targets) in a windy environment. |
| [19] | Cooperative tracking for fixed-wing UAVs in the presence of an unknown wind component. |
| [20] | Method to accurately estimate and compensate for wind gusts, acting on the nonlinear quadrotor in real-time. |
| [15] | Mechanism of UAV movement in the wind field from velocity, force, and energy viewpoint. |
Table 2.
Relevant research incorporating obstacle models in swarm simulations.
Table 2.
Relevant research incorporating obstacle models in swarm simulations.
| Reference | Description |
|---|
| [28] | Formation control and link selection for UAVs in complex environments using APF. |
| [29] | Method for UAV avoiding dynamic obstacles using their velocity as input in a noisy environment. |
| [30] | Reinforcement-learning-based method for UAVs to avoid obstacles in variable map sizes and swarm sizes. |
| [31] | A dual-based flocking obstacle avoidance algorithm for dealing with narrow obstacles. |
| [32] | Obstacle and collision avoidance for UAV swarm based on vector field histogram algorithm. |
| [33] | Improved APF method that can plan a smooth, reasonable path with reduced energy consumption. |
| [34] | A hierarchical weighting Vicsek model for swarm alignment and obstacle avoidance. |
Table 3.
Relevant research incorporating both obstacles and wind disturbance.
Table 3.
Relevant research incorporating both obstacles and wind disturbance.
| Reference | Description |
|---|
| [35] | Local obstacle avoidance control scheme for UAV with suspended payload for complex environments with dense obstacles and wind. |
| [36] | Obstacle avoidance for fixed-wing aircraft in no-fly zones in the presence of wind disturbances. |
| [37] | Energy-efficient UAV mission planning in the presence of wind was simulated using the Dryden turbulence model. |
| [38] | Bio-inspired swarm control under dynamic obstacle interference. |
Table 4.
Wind disruption scenario design with experiment process for disruption modeling and use-case scenario.
Table 4.
Wind disruption scenario design with experiment process for disruption modeling and use-case scenario.
| Scenario Number | Scenario Design | Scenario Suitability |
|---|
| Scenario 1.1 | Region of interest (ROI) is divided into cells with a wind speed value. | Incorporate current 2D simulations for path planning and obstacle avoidance where wind effects are not considered. |
| Scenario 1.2 | A 3D wind channel design with different wind speeds and directions. | Suitable for 3D simulation environments where the above implementations are observed along with factors such as swarm cohesion changes in wind effects with altitude. |
| Scenario 1.3 | Close contact agents are showing drift and movement due to downwash. | Suitable for swarm implementations where downwash and induced airflow effects of agents are not considered. |
Table 5.
Ostacle scenario design with experiment process for disruption modeling and use-case scenario.
Table 5.
Ostacle scenario design with experiment process for disruption modeling and use-case scenario.
| Scenario Number | Scenario Design | Scenario Suitability |
|---|
| Scenario 2.1 | Grid-based models | Incorporate in basic 2D and 3D environments to test the feasibility of obstacle avoidance, time to consensus, and swarm cohesion factors. |
| Scenario 2.2 | Complex geometry in sparse 3D environments | Incorporate in 3D environments to extend obstacle property beyond simplified geometric shapes. |
| Scenario 2.3 | Simulator-supported 3D modeling | Incorporate simulation platforms where obstacle property is given primary focus to study how different obstacles influence agent and swarm performance. |
Table 6.
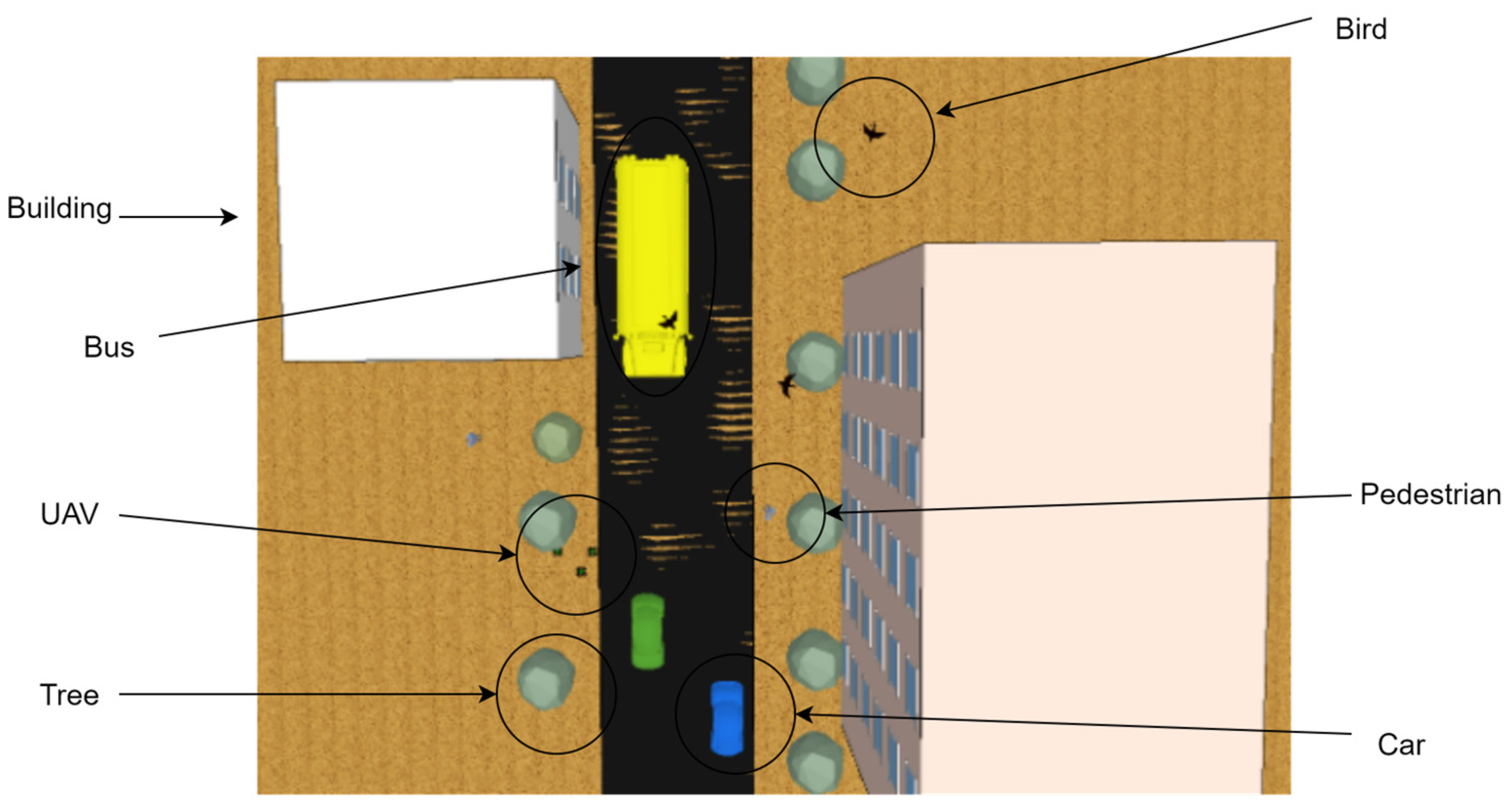
Types of obstacles designed in the simulated environment and their characteristics.
Table 6.
Types of obstacles designed in the simulated environment and their characteristics.
| Obstacle Name | Characteristic |
|---|
| Bird | Dynamic, fast, small |
| Bus | Dynamic, slow, large |
| Car | Dynamic, fast, large |
| Pedestrian | Dynamic, slow, small |
| Building | Static, very large |
| Tree | Static, small |
Table 7.
A summary of created scenarios characterized by their major disruption, minor disruption (if any), and the dimensionality of the induced disruption.
Table 7.
A summary of created scenarios characterized by their major disruption, minor disruption (if any), and the dimensionality of the induced disruption.
| Scenario Number | Major Disruption | Minor Disruption | Nature of Major Disruption |
|---|
| 1.1 | Wind | Obstacles | 2D |
| 1.2 | Wind | Obstacles | 3D |
| 1.3 | Wind | NA | 3D |
| 2.1 | Obstacles | NA | 3D |
| 2.2 | Obstacles | Wind | 3D |
| 2.3 | Obstacles | NA | 3D |
Table 8.
Scenario numbers are categorized by the type of UAV swarm agents used and their connection scheme.
Table 8.
Scenario numbers are categorized by the type of UAV swarm agents used and their connection scheme.
| Scenario Number | Agent Properties |
|---|
| 1.1 | Point mass UAV agents connected in a decentralized manner |
| 1.2 | Point mass UAV agents connected in a decentralized manner |
| 1.3 | 3D models of UAV agents with no defined inter-agent connection |
| 2.1 | Point mass UAV agents connected via a sparse agent-aware connection |
| 2.2 | Point mass UAV agents connected in a centralized leader–follower strategy |
| 2.3 | 3D models of UAV agents via sparse agent-aware connection |
Table 9.
Wind disruption experiment objectives and the scenarios they use for wind disruption analysis.
Table 9.
Wind disruption experiment objectives and the scenarios they use for wind disruption analysis.
| Experiment Number | Scenario Used | Objective |
|---|
| 1 | Scenario 1.1 | Test changes in trajectory deviation for agents deployed in Scenario 1.1. |
| 2 | Scenario 1.2 | Incorporate the designed 3D wind grid with agents to measure energy changes consumed in the presence of wind factors. |
| 3 | Scenario 1.3 | Observe agent interactions due to induced airflow in proximity. |
Table 10.
Obstacle disruption experiment objectives and the scenarios they use for wind disruption analysis.
Table 10.
Obstacle disruption experiment objectives and the scenarios they use for wind disruption analysis.
| Experiment Number | Scenario Used | Objective |
|---|
| 4 | Scenario 2.1 | Test changes in area coverage when a swarm is subjected to dense obstacles. |
| 5 | Scenario 1.2 and 2.2 | Test swarm cohesion metric in the presence of wind and obstacles (two experiment variations: Experiment 5.1 with only Scenario 2.2; and Experiment 5.2 with Scenarios 1.2 and 2.2 implemented). |
| 6 | Scenario 2.3 | Record the variability and encounter rate allowed by Scenario 2.3 in swarm agent deployment. |
Table 11.
A summary of the experiment numbers and the major disruption effects observed.
Table 11.
A summary of the experiment numbers and the major disruption effects observed.
| Experiment Number | Major Effect of Disruption Observed |
|---|
| 1 | Demonstrate changes in path and trajectory based on the introduction of obstacles and wind. |
| 2 | Demonstrate changes in agent energy consumption as UAV moves in the absence and presence of turbulence. |
| 3 | Demonstrate the effect of induced airflow and downwash on agents near each other in terms of collision occurrence. |
| 4 | Demonstrate changes in vital swarm functions such as area coverage in the presence of obstacles. |
| 5 | Demonstrate changes in a vital metric: swarm cohesion as agents move in the disruption scenario. |
| 6 | Demonstrate the result of effective disruption modeling when agents encounter variable obstacles in the modeled scenario. |



 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}