
Near Real-Time Remote Sensing Based on Satellite Internet: Architectures, Key Techniques, and Experimental Progress

 , ,
, ,
Abstract
1. Introduction
2. Near Real-Time Remote Sensing Architecture
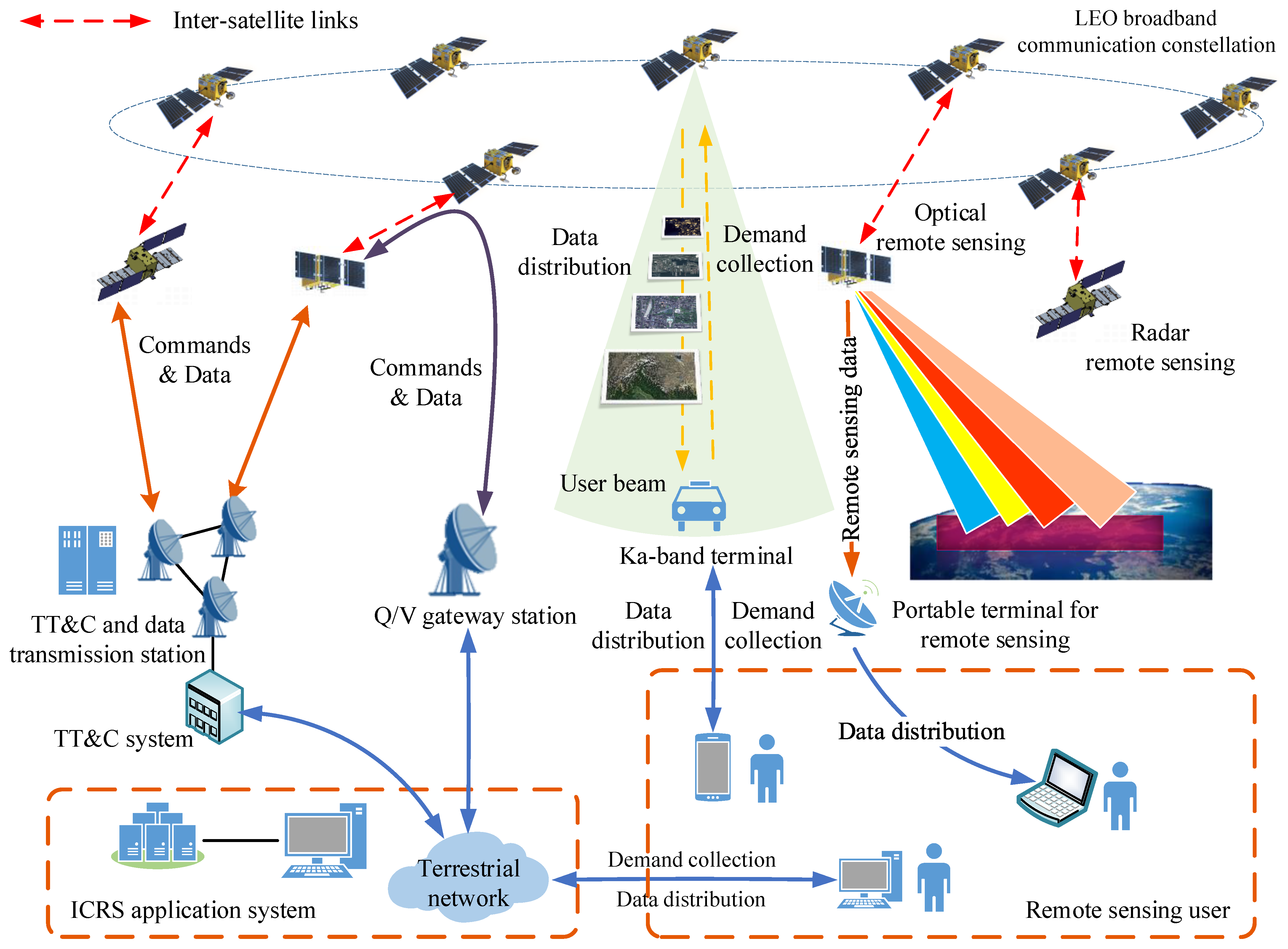
2.1. Overall Scheme of NRRS
- Requests collection: The users’ needs for remote sensing can be submitted to the ICRS application system through the terrestrial network, or they can access the satellite Internet through satellite terminals anytime and anywhere to submit their need for remote sensing.
- Task planning: The traditional OC&M system makes overall planning for satellites and TT&C stations. Under the presented architecture, the ICRS application system integrates satellite Internet resources as a whole. User management, session management, data forwarding, and network slicing are handled by the communication network management system. Remote sensing satellites access the Internet as information nodes, and communication resources are immediately available upon application. Therefore, the difficulty of task planning is greatly reduced.
- Task uploading: The remote sensing commands can be uploaded through the TT&C station, as well as through the satellite Internet, i.e., the commands are transmitted to the remote sensing satellite via the gateway station, communication satellite, and inter-satellite link.
- Data transmission: Remote sensing data can be downloaded through traditional data receiving stations, or downloaded to the communication terminal through the inter-satellite links. It can also be directly downloaded to the portable remote sensing terminal.
- Data processing: The remote sensing data can be processed in the ICRS application system, and then distributed to users via the terrestrial network or satellite Internet, or processed in real time or near real time at the data receiving station. When the onboard processing capacity is sufficient, it can also be processed in orbit to achieve a fast closed-loop from demand collection to data distribution.
2.2. Workflow of NRRS
- The OC&M system coordinates the in-orbit satellite resources, TT&C resources, and data-receiving resources according to the remote sensing needs and task priorities, forms satellite TT&C plans, control parameters, and data-receiving plans, and then sends them to the TT&C system and data receiving stations, respectively.
- The TT&C system uploads the commands to the satellite after receiving the control commands and TT&C plan.
- The remote sensing satellite sends the original image data to the data receiving station.
- The data-receiving station sends the data to the data-processing system, generates corresponding data and information products, and sends them to users of remote sensing.
- Users of remote sensing can access the satellite Internet through broadband communication terminals from anywhere and submit requirements for remote sensing to the OC&M system.
- The OC&M system uploads remote sensing tasks to the remote sensing satellites in real time via satellite Internet and inter-satellite links.
- After performing the shooting task, the remote sensing satellite with the capability of in-orbit processing accesses the satellite Internet, and transmits the original data to the users in near real time, enabling them to be free of constraints of gateway stations and network resources.
3. Key Techniques of near Real-Time Remote Sensing
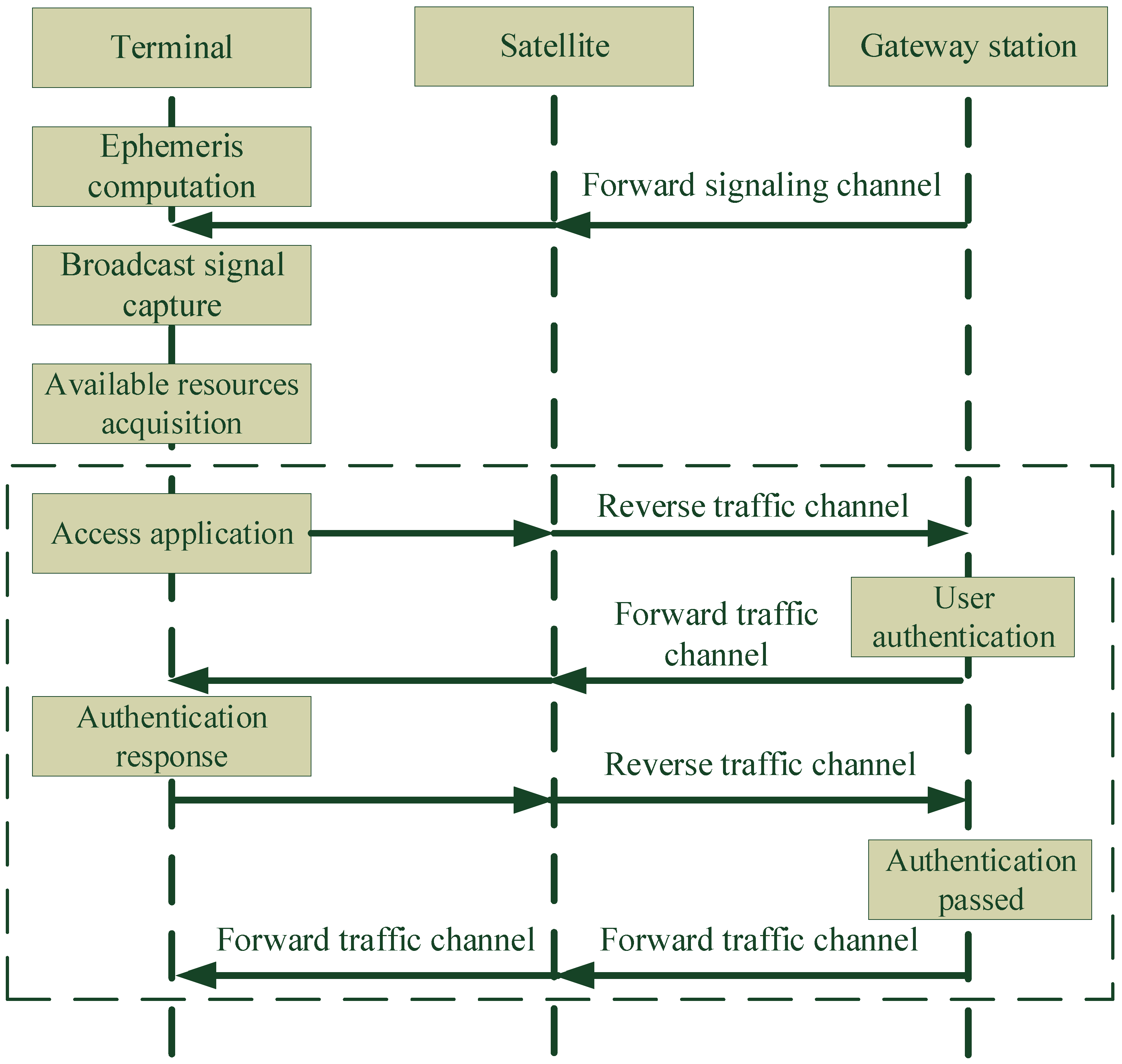
3.1. Random Access Technology of Remote Sensing Users
- (1)
- The terminal calculates the orbit of the satellite according to the built-in ephemeris, obtains the location of visible satellites, and then re-directs the antenna beam to complete the satellite tracking.
- (2)
- In the absence of ephemeris, the terminal scans the airspace to search for visible satellites and capture the broadcast signal. The ephemeris information in the broadcast signal is used to complete satellite ephemeris updates, hence realizing the satellite tracking.
- (3)
- The terminal sends a random access request over a dedicated access channel.
- (4)
- The gateway station determines whether the authentication is passed and accepts the application for terminal access.
3.2. Random Access Technology of Remote Sensing Satellites
3.3. Near Real-Time Edge Computing Technology
3.4. Dynamic Network Scheduling and Task Planning Technology
4. Application Scenarios and Superiority Analysis
4.1. Potential Application Scenarios
- Emergency and Disaster Relief: The NRRS system can immediately send the images of the disaster location back to the command center, as well as rapidly access historical images for comparison, so as to support on-site personnel in disaster research and rescue assessment.
- Environment Protection: Compared with traditional remote sensing, the time-sensitive RtTS system can detect the behaviors that endanger the environment in time, respond immediately, and improve ecological environment monitoring.
- Marine Law Enforcement: The NRRS service can identify and track illegal ships in a timely manner, improve law enforcement efficiency, protect marine fishery resources, and maintain maritime security and stability.
- News Media: The NRRS service optimizes the efficiency of news data collection, transmission, and distribution. Reporters can obtain images efficiently, conveniently, and intuitively.
4.2. Superiority Analysis
- Response in Real Time: The ICRS application system guarantees the task planning, command upload, data transmission and distribution immediately, which allows for immediate (minutes) and routine (hours) mission response for imaging of the target area.
- Ubiquitous and Efficient: Remote sensing satellites access the Internet as information nodes, and the commands and data are transmitted instantly via the satellite communication network with global coverage. The task uploading and data downloading no longer rely on the limited resources of TT&C and data-receiving stations on the ground, hence greatly improving the information transmission rate. With the help of mobile terminals, the requirements for remote sensing can be proposed, as well as the remote sensing images of the target area which can be received anytime and anywhere.
- Intelligent Fusion: The intelligent algorithms on board and on the ground facilitate completing the rapid interpretation and execution of remote sensing requirements, as well as the transmission and processing of remote sensing images. Through intelligent task planning of remote sensing, multi-satellite collaborative resource scheduling, comparison and pre-processing of massive remote sensing data, etc., rapid response to the users’ demand and near real-time acquisition of remote sensing images can be guaranteed.
5. Experimental Progress
5.1. Introduction of the Test Satellite Constellation
5.1.1. Communication Capability of the Satellite
5.1.2. Earth Observation Capability of the Satellite
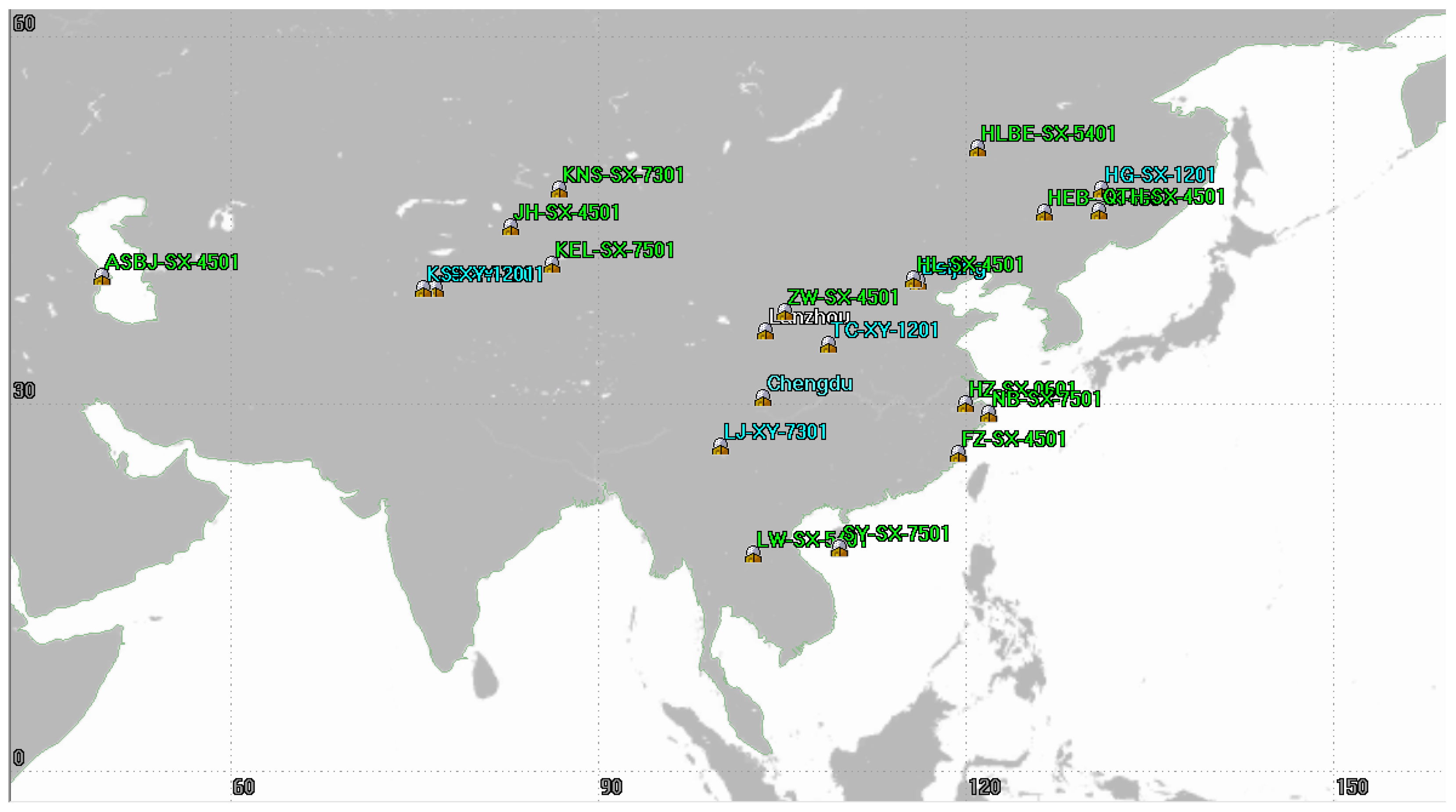
5.2. Resources of the Ground Segment
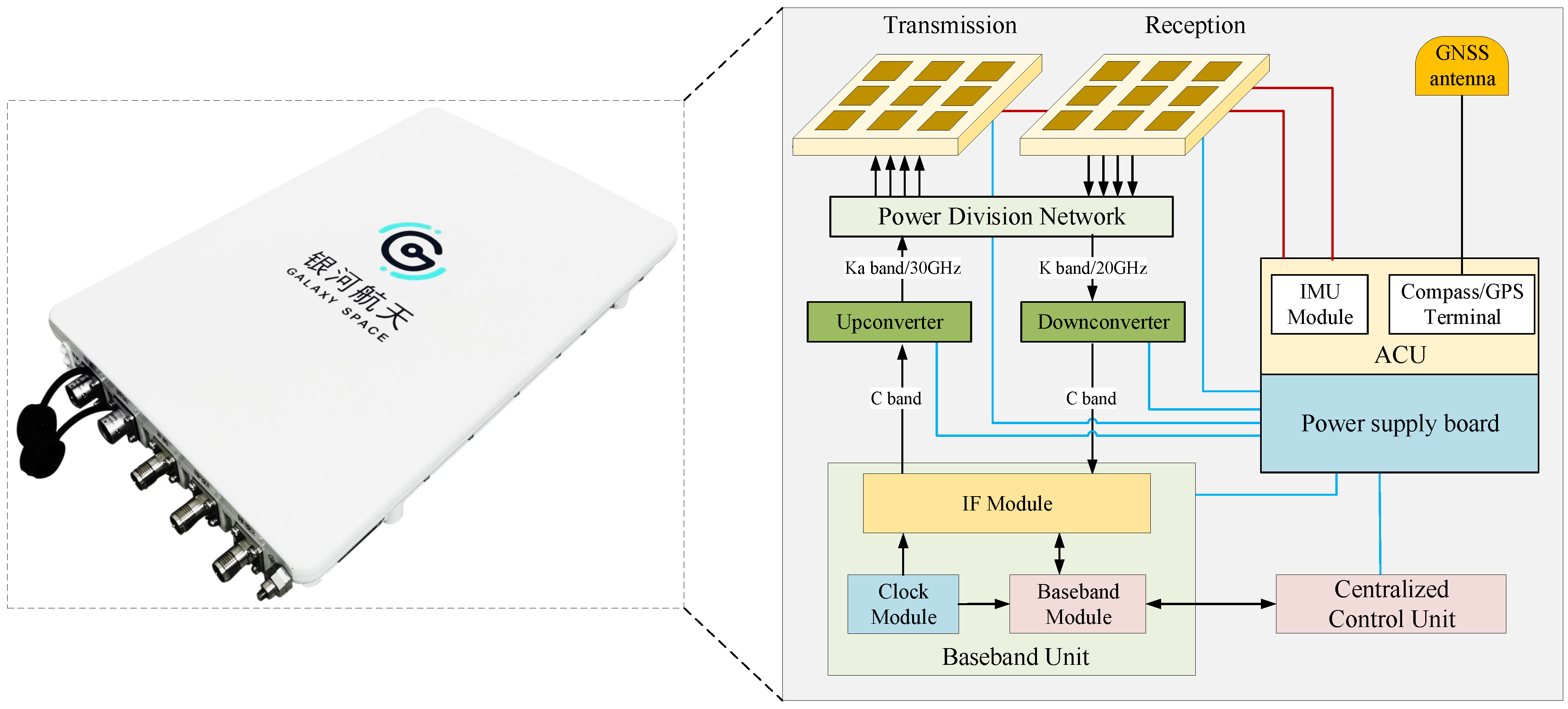
5.3. Communication Test of User Terminals
5.4. NRRS Task Design
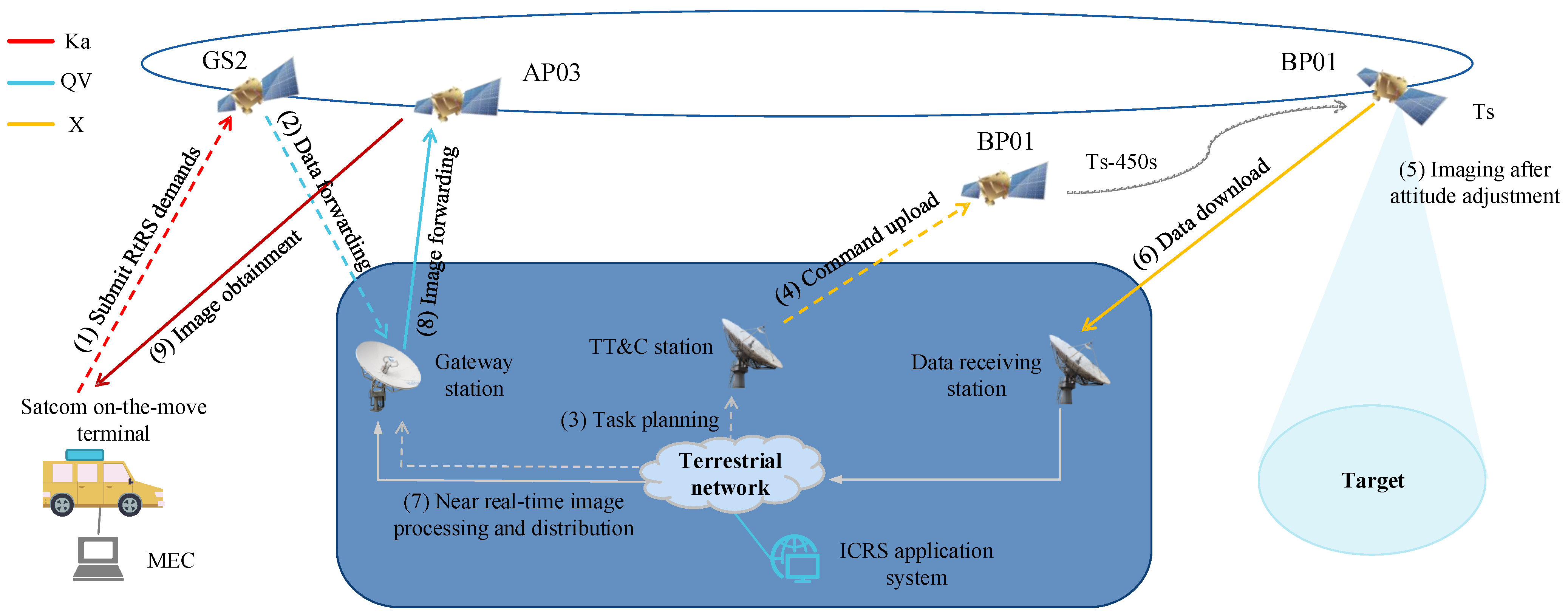
- (1)
- The user accesses the satellite Internet based on the STOM terminal and submits remote sensing demands.
- (2)
- The satellite GS2 forwards the remote sensing requirements to the gateway station.
- (3)
- The ICRS application system responds to user requirements, carries out task planning, and gives feedback on task status.
- (4)
- The TT&C station uploads the shooting commands to the remote sensing satellite BP01 through.
- (5)
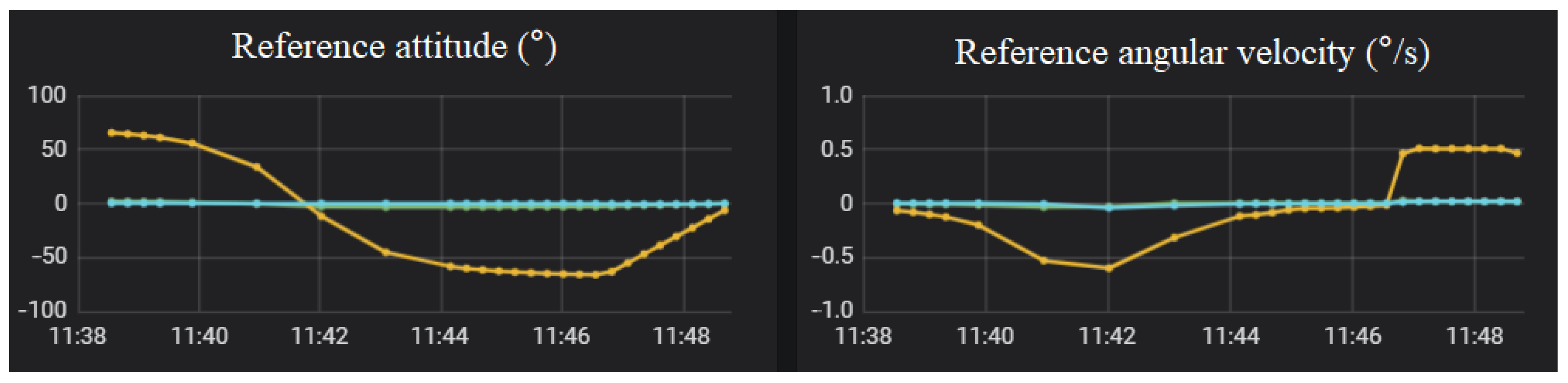
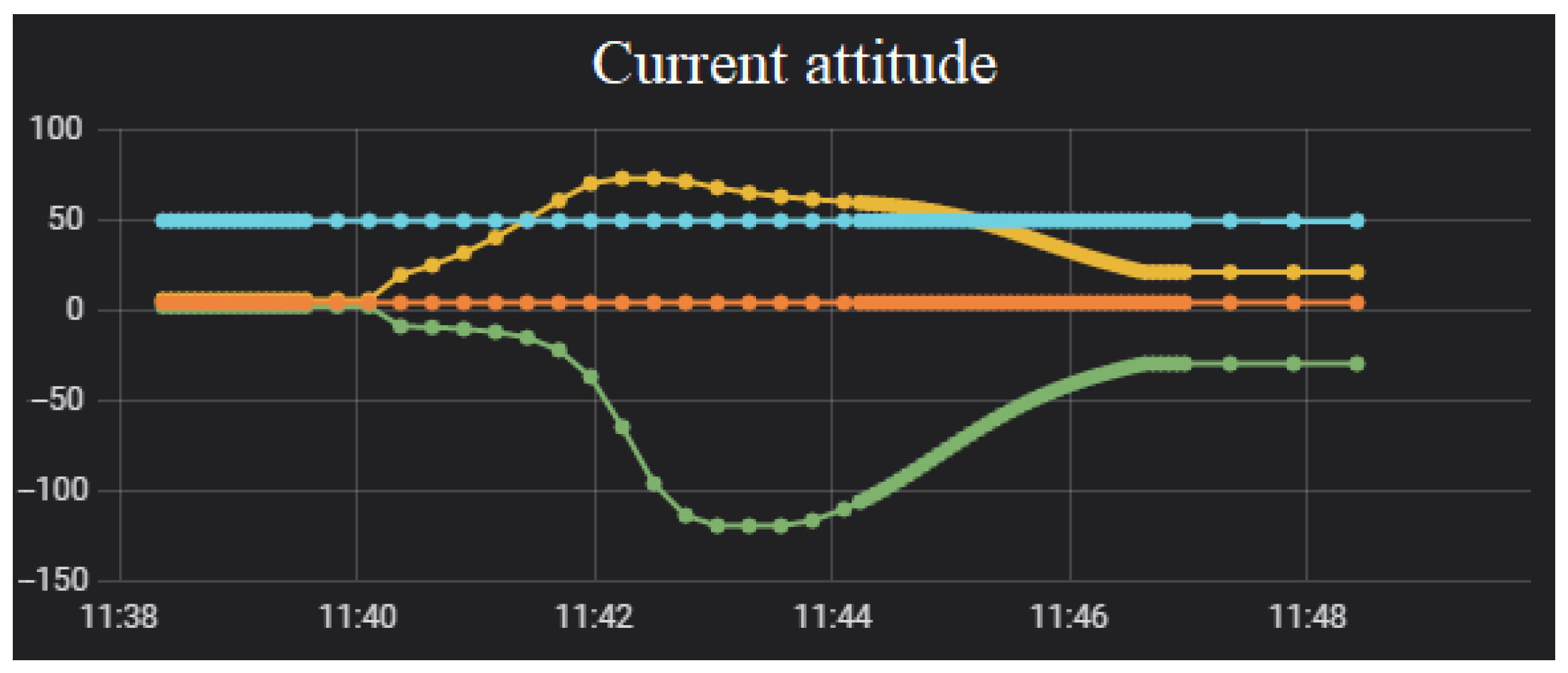
- The satellite BP01 starts attitude maneuver 450 s in advance and starts imaging after attitude adjustment.
- (6)
- The remote sensing satellite observes the target and sends images to the data receiving station simultaneously.
- (7)
- The data receiving station uploads the image data to the ICRS application system for near real-time processing and original image analysis, then refreshes the task status.
- (8)
- The gateway station forwards the processed image data to the satellite AP03.
- (9)
- The user accesses the satellite Internet and ICRS application system again to obtain the images.
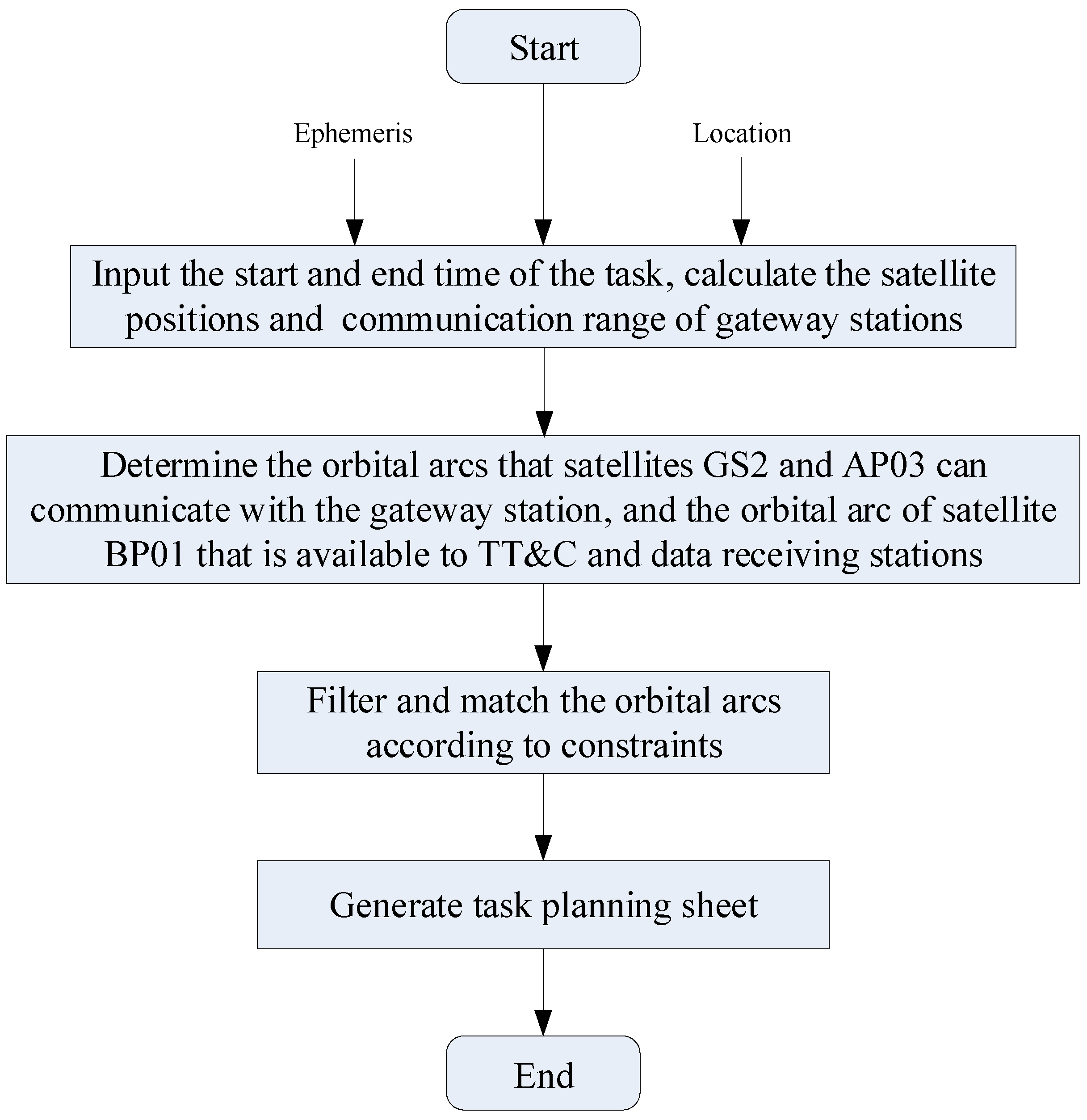
5.5. NRRS Task Planning
- (1)
- The demand collection needs to be within the communication arc of the satellite GS2, and the duration should be ≥2 min.
- (2)
- Command generation and upload time ≥3 min.
- (3)
- Command upload should be in the TT&C arc of satellite BP01.
- (4)
- The time from the end of command upload to the start of remote sensing should be >450 s.
- (5)
- The imaging time lasts for 2 min and should be kept within the data-receiving arc of BP01.
- (6)
- The total duration of the file upload and image processing ≥7 min.
- (7)
- Image data distribution is completed in the communication arc of AP03.
5.6. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chuvieco, E.; Aguado, I.; Salas, J.; García, M.; Yebra, M.; Oliva, P. Satellite remote sensing contributions to wildland fire science and management. Curr. For. Rep. 2020, 6, 81–96. [Google Scholar] [CrossRef]
- Zhou, D.; Xiao, J.; Bonafoni, S.; Berger, C.; Deilami, K.; Zhou, Y.; Frolking, S.; Yao, R.; Qiao, Z.; Sobrino, J.A. Satellite remote sensing of surface urban heat islands: Progress, challenges, and perspectives. Remote Sens. 2018, 11, 48. [Google Scholar] [CrossRef]
- Weiss, M.; Jacob, F.; Duveiller, G. Remote sensing for agricultural applications: A meta-review. Remote Sens. Environ. 2020, 236, 111402. [Google Scholar] [CrossRef]
- Safyan, M. Planet’s dove satellite constellation. In Handbook of Small Satellites: Technology, Design, Manufacture, Applications, Economics and Regulation; Springer International Publishing: Cham, Switzerland, 2020; pp. 1–17. [Google Scholar]
- Smith, K.E.; Terrano, J.F.; Pitchford, J.L.; Archer, M.J. Coastal wetland shoreline change monitoring: A comparison of shorelines from high-resolution WorldView Satellite imagery, aerial Imagery, and field surveys. Remote Sens. 2021, 13, 3030. [Google Scholar] [CrossRef]
- Castelletti, D.; Farquharson, G.; Stringham, C.; Duersch, M.; Eddy, D. Capella Space First Operational SAR Satellite. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 1483–1486. [Google Scholar]
- Wei, J.; Yang, H.; Tang, W.; Li, Q. Spatiotemporal-Spectral Fusion for Gaofen-1 Satellite Images. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Guk, E.; Levin, N. Analyzing spatial variability in night-time lights using a high spatial resolution color Jilin-1 image–Jerusalem as a case study. ISPRS J. Photogramm. Remote Sens. 2020, 163, 121–136. [Google Scholar] [CrossRef]
- Wu, X.; Yang, Y.; Sun, Y.; Xie, Y.; Song, X.; Huang, B. Dynamic regional splitting planning of remote sensing satellite swarm using parallel genetic PSO algorithm. Acta Astronaut. 2023, 204, 531–551. [Google Scholar] [CrossRef]
- Caon, M.; Ros, P.M.; Martina, M.; Bianchi, T.; Magli, E.; Membibre, F.; Ramos, A.; Latorre, A.; Kerr, M.; Wiehle, S.; et al. Very low latency architecture for earth observation satellite onboard data handling, compression, and encryption. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 7791–7794. [Google Scholar]
- Alves de Oliveira, V.; Chabert, M.; Oberlin, T.; Poulliat, C.; Bruno, M.; Latry, C.; Carlavan, M.; Henrot, S.; Falzon, F.; Camarero, R. Reduced-complexity end-to-end variational autoencoder for on board satellite image compression. Remote Sens. 2021, 13, 447. [Google Scholar] [CrossRef]
- Wang, L.; Meng, J. Constellation Design and Application of Real-Time Space-Based Information Services Supporting Communication, Navigation and Remote Integration. In Proceedings of the International Conference in Communications, Signal Processing, and Systems, Melmaruvathur, India, 28–30 July 2020; pp. 1869–1878. [Google Scholar]
- MAXAR. Rapid Access Program: Stay on Top of Ever-Changing Ground Conditions. 2022. Available online: https://www.maxar.com/products/rapid-access-program (accessed on 2 December 2022).
- MAXAR. Direct Access Program: Priority Imagery at Your Command. 2022. Available online: https://www.maxar.com/products/direct-access-program (accessed on 2 December 2022).
- MAXAR. Tactical Access Program. 2022. Available online: https://resources.maxar.com/data-sheets/tactical-access-program (accessed on 2 December 2022).
- Del Portillo, I.; Cameron, B.G.; Crawley, E.F. A technical comparison of three low earth orbit satellite constellation systems to provide global broadband. Acta Astronaut. 2019, 159, 123–135. [Google Scholar] [CrossRef]
- Marcuccio, S.; Ullo, S.; Carminati, M.; Kanoun, O. Smaller satellites, larger constellations: Trends and design issues for earth observation systems. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 50–59. [Google Scholar] [CrossRef]
- Gong, Y.; Zhang, S.; Peng, X. Quick coverage analysis of mega Walker Constellation based on 2D map. Acta Astronaut. 2021, 188, 99–109. [Google Scholar] [CrossRef]
- Huang, S.; Colombo, C.; Bernelli-Zazzera, F. Multi-criteria design of continuous global coverage Walker and Street-of-Coverage constellations through property assessment. Acta Astronaut. 2021, 188, 151–170. [Google Scholar] [CrossRef]
- McDowell, J.C. Starlink Statistics. 2022. Available online: https://planet4589.org/space/con/star/stats.html (accessed on 2 December 2022).
- McDowell, J.C. The low earth orbit satellite population and impacts of the SpaceX Starlink constellation. Astrophys. J. Lett. 2020, 892, L36. [Google Scholar] [CrossRef]
- OneWeb. OneWeb Confirms Successful Deployment of 40 Satellites Launched with SpaceX. 2022. Available online: https://oneweb.net/resources/oneweb-confirms-successful-deployment-40-satellites-launched-spacex (accessed on 9 December 2022).
- OneWeb. OneWeb Completes Its ‘Five to 50’ Mission to Cover Regions North of 50 Degrees Latitude including UK, Canada, Alaska and Arctic Region. 2021. Available online: https://oneweb.net/resources/oneweb-completes-its-five-50-mission-cover-regions-north-50-degrees-latitude-including-uk (accessed on 9 December 2022).
- Lai, Z.; Wu, Q.; Li, H.; Lv, M.; Wu, J. OrbitCast: Exploiting Mega-Constellations for Low-Latency Earth Observation. In Proceedings of the 2021 IEEE 29th International Conference on Network Protocols (ICNP), Dallas, TX, USA, 1–5 November 2021; pp. 1–12. [Google Scholar]
- Peng, M.; Zhang, S.; Xu, H.; Zhang, M.; Sun, Y.; Cheng, Y. Communication and remote sensing integrated LEO satellites: Architecture, technologies and experiment. Telecommun. Sci. 2022, 38, 13–24. [Google Scholar]
- Space Development Agency. Space Development Agency Next-Generation Space Architecture Request for Information; Space Development Agency: Arlington, VA, USA, 2019. [Google Scholar]
- Turner, F. Creating the JACD2 Central Support Structure–The NDSA Transport Layer; Space Development Agency: Washington, DC, USA, 2022. [Google Scholar]
- Lv, T.; Liu, W.; Huang, H.; Jia, X. Optimal data downloading by using inter-satellite offloading in leo satellite networks. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Li, S.; Hou, K.; Cheng, C.; Li, S.; Chen, B. A space-interconnection algorithm for satellite constellation based on spatial grid model. Remote Sens. 2020, 12, 2131. [Google Scholar] [CrossRef]
- Jia, X.; Lv, T.; He, F.; Huang, H. Collaborative data downloading by using inter-satellite links in LEO satellite networks. IEEE Trans. Wirel. Commun. 2017, 16, 1523–1532. [Google Scholar] [CrossRef]
- Ortiz-Gomez, F.G.; Salas-Natera, M.A.; Martínez, R.; Landeros-Ayala, S. Optimization in VHTS satellite system design with irregular beam coverage for non-uniform traffic distribution. Remote Sens. 2021, 13, 2642. [Google Scholar] [CrossRef]
- Li, A.; Huang, P.; Shi, L.; He, G.; Feng, X.; Wu, Y.W.; Zhang, Q.; Ma, G.B.; Feng, K.; Yang, J. Update of Remote Sensing Satellite Ground System of China Remote Sensing Satellite Ground Station. J. Remote Sens. 2021, 25, 251–266. [Google Scholar]
- Knopp, M.T.; Spoerl, A.; Gnat, M.; Rossmanith, G.; Huber, F.; Fuchs, C.; Giggenbach, D. Towards the utilization of optical ground-to-space links for low earth orbiting spacecraft. Acta Astronaut. 2020, 166, 147–155. [Google Scholar] [CrossRef]
- Xie, R.; Tang, Q.; Wang, Q.; Liu, X.; Yu, F.R.; Huang, T. Satellite-terrestrial integrated edge computing networks: Architecture, challenges, and open issues. IEEE Netw. 2020, 34, 224–231. [Google Scholar] [CrossRef]
- Song, Z.; Hao, Y.; Liu, Y.; Sun, X. Energy-efficient multiaccess edge computing for terrestrial-satellite Internet of Things. IEEE Internet Things J. 2021, 8, 14202–14218. [Google Scholar] [CrossRef]
- Sun, Y.; Peng, M.; Zhang, S.; Lin, G.; Zhang, P. Integrated Satellite-Terrestrial Networks: Architectures, Key Techniques, and Experimental Progresses. IEEE Netw. 2022, 36, 191–198. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Axis | Antenna | Range |
|---|---|---|
| X | both | ∼ |
| Y | Q/V antenna-1 | ∼ |
| Q/V antenna-2 | ∼ |
| From | Reply |
|---|---|
| 192.168.91.200 | Byte = 32; Time = 42 ms; TTL = 63 |
| 192.168.91.200 | Byte = 32; Time = 39 ms; TTL = 63 |
| 192.168.91.200 | Byte = 32; Time = 47 ms; TTL = 63 |
| 192.168.91.200 | Byte = 32; Time = 44 ms; TTL = 63 |
| 192.168.91.200 | Byte = 32; Time = 40 ms; TTL = 63 |
| 192.168.91.200 | Byte = 32; Time = 38 ms; TTL = 63 |
| 192.168.91.200 | Byte = 32; Time = 38 ms; TTL = 63 |
| Time | Data Volume | Speed |
|---|---|---|
| 25.00–26.01 s | 5.38 Mbytes | 45.0 Mbits/s |
| 26.01–27.01 s | 5.38 Mbytes | 45.1 Mbits/s |
| 27.01–28.01 s | 5.35 Mbytes | 45.0 Mbits/s |
| 28.01–29.01 s | 5.30 Mbytes | 44.6 Mbits/s |
| 29.01–30.01 s | 5.37 Mbytes | 45.1 Mbits/s |
| 31.01–32.01 s | 5.43 Mbytes | 45.4 Mbits/s |
| 31.01–32.01 s | 5.38 Mbytes | 44.8 Mbits/s |
| 32.01–33.01 s | 5.32 Mbytes | 44.5 Mbits/s |
| Item | Time |
|---|---|
| Task submit | 2022-11-07 13:10:00 |
| Command upload | 2022-11-07 13:12:42 |
| Data transmission start | 2022-11-07 13:22:59 |
| Shooting start | 2022-11-07 13:23:22 |
| Shooting end | 2022-11-07 13:25:22 |
| Data transmission end | 2022-11-07 13:25:31 |
| Image files upload to the ICRS system | 2022-11-07 13:27:46 |
| File analysis completed | 2022-11-07 13:31:19 |
| Images obtained | 2022-11-07 13:33:44 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Qin, Q.; Zhang, S.; Zhao, X.; Yan, X.; Wang, W.; Zhang, H. Near Real-Time Remote Sensing Based on Satellite Internet: Architectures, Key Techniques, and Experimental Progress. Aerospace 2024, 11, 167. https://doi.org/10.3390/aerospace11020167
Zhang P, Qin Q, Zhang S, Zhao X, Yan X, Wang W, Zhang H. Near Real-Time Remote Sensing Based on Satellite Internet: Architectures, Key Techniques, and Experimental Progress. Aerospace. 2024; 11(2):167. https://doi.org/10.3390/aerospace11020167
Chicago/Turabian StyleZhang, Peng, Qin Qin, Shijie Zhang, Xiangtian Zhao, Xiaoliang Yan, Wei Wang, and Hongbin Zhang. 2024. "Near Real-Time Remote Sensing Based on Satellite Internet: Architectures, Key Techniques, and Experimental Progress" Aerospace 11, no. 2: 167. https://doi.org/10.3390/aerospace11020167
APA StyleZhang, P., Qin, Q., Zhang, S., Zhao, X., Yan, X., Wang, W., & Zhang, H. (2024). Near Real-Time Remote Sensing Based on Satellite Internet: Architectures, Key Techniques, and Experimental Progress. Aerospace, 11(2), 167. https://doi.org/10.3390/aerospace11020167