
Development and Implementation of a Mission Data-Handling Algorithm for an Automatic Flight Guidance System

 , , and
, , and 
Abstract
1. Introduction
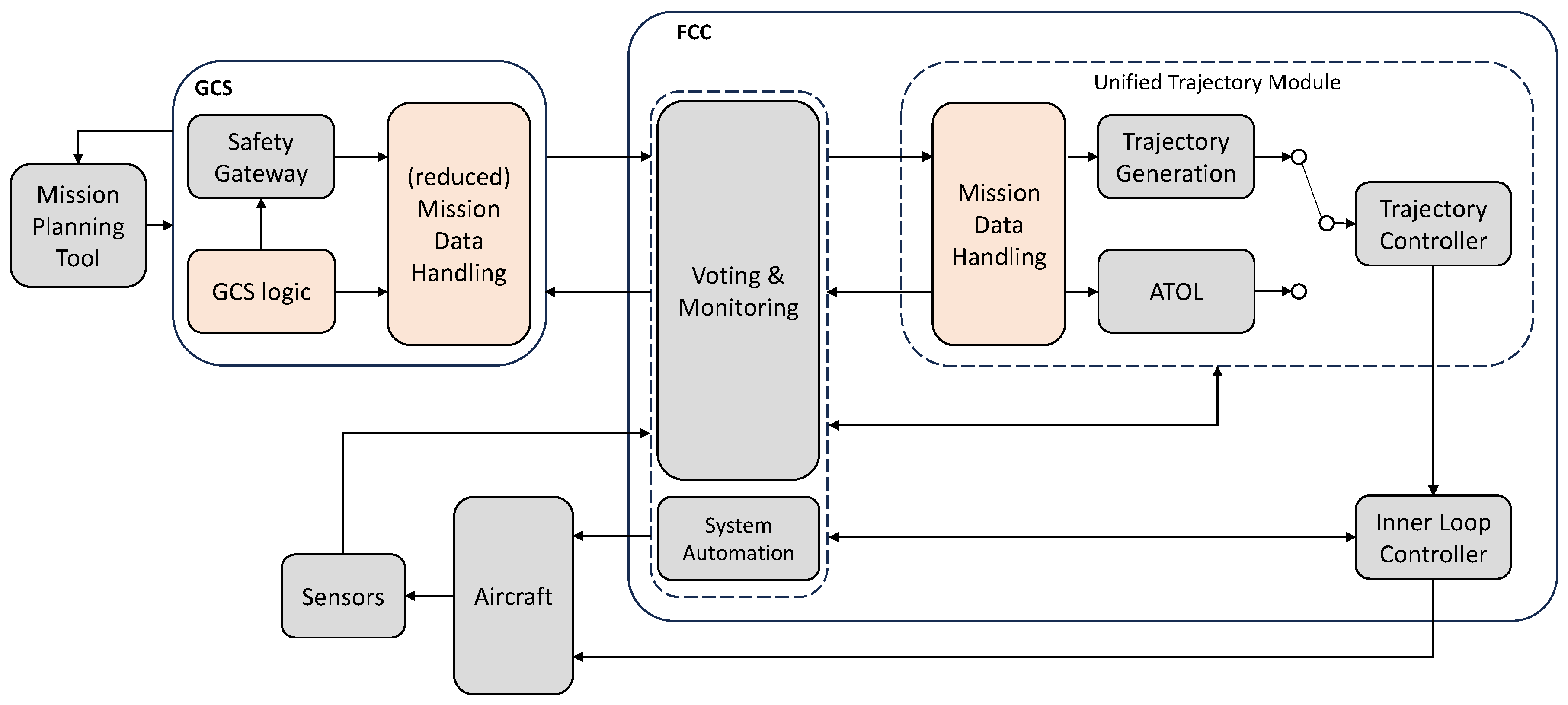
2. Automated Mission Concept and Its System Architecture
2.1. Mission Planning Tool
2.2. Safety Gateway
2.3. Mission Data Handling
2.4. Voting and Monitoring
2.5. System Automation
2.6. Automatic Take-Off and Landing (ATOL) and Trajectory Generation
2.7. Trajectory and Inner Loop Control
3. Mission Data-Handling Algorithm
3.1. Mission Data Handling on the FCC
3.1.1. Message Sampling
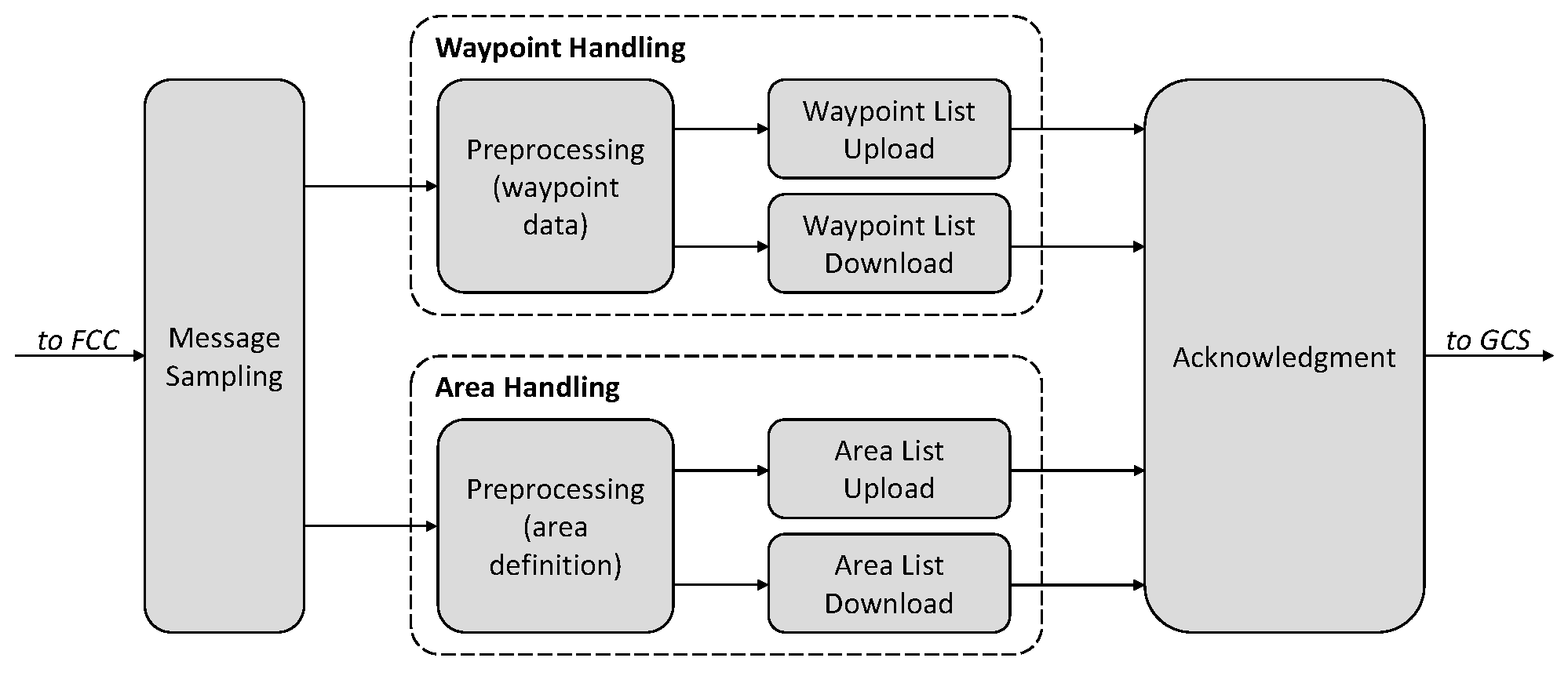
3.1.2. Preprocessing of Waypoint and Area Data
3.1.3. Acknowledgement
3.1.4. Timeout and Rejected Messages
3.1.5. Mission Upload
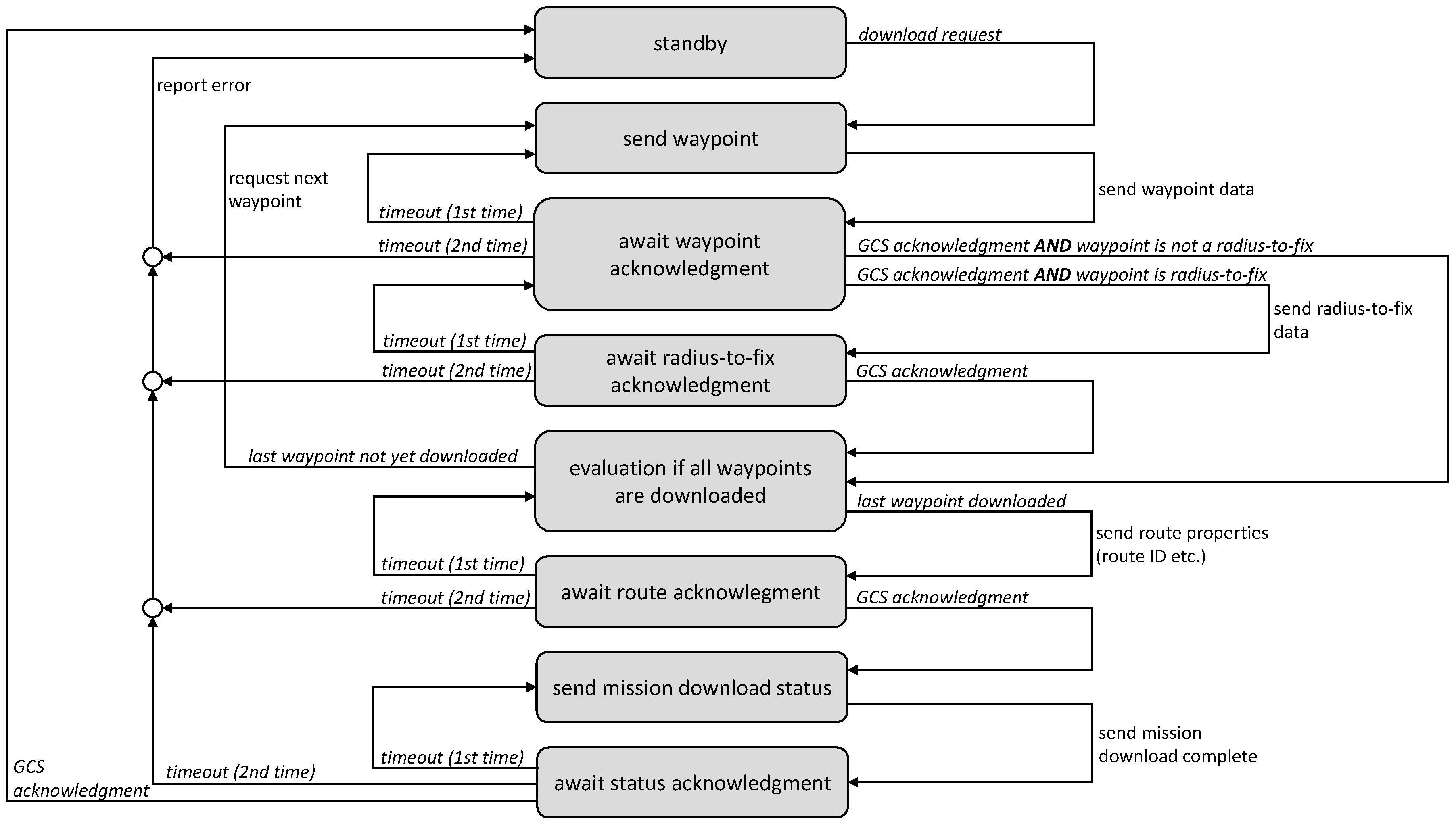
3.1.6. Mission Download
3.1.7. FROM-TO-NEXT Waypoint Status
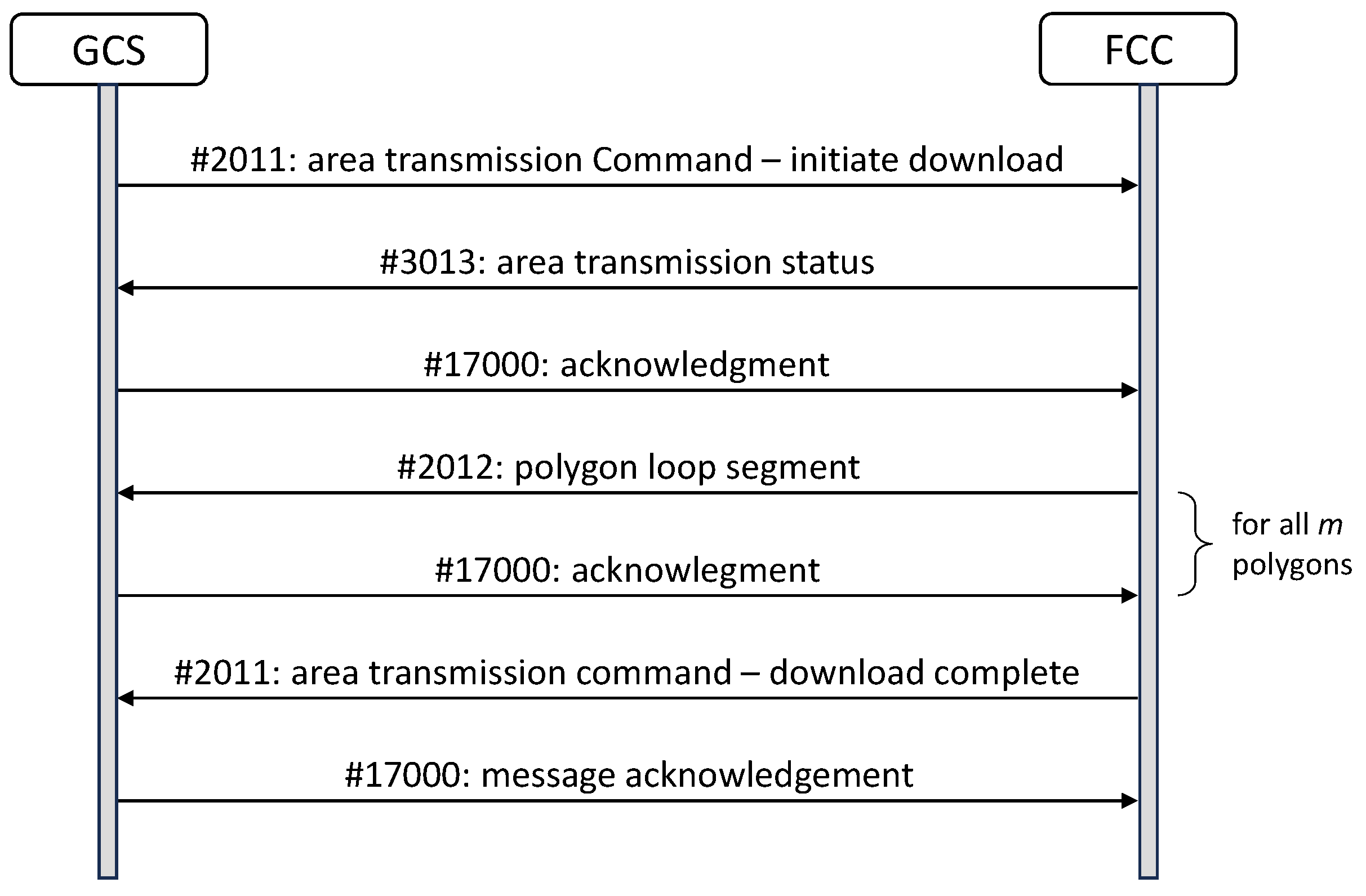
3.1.8. Area Upload
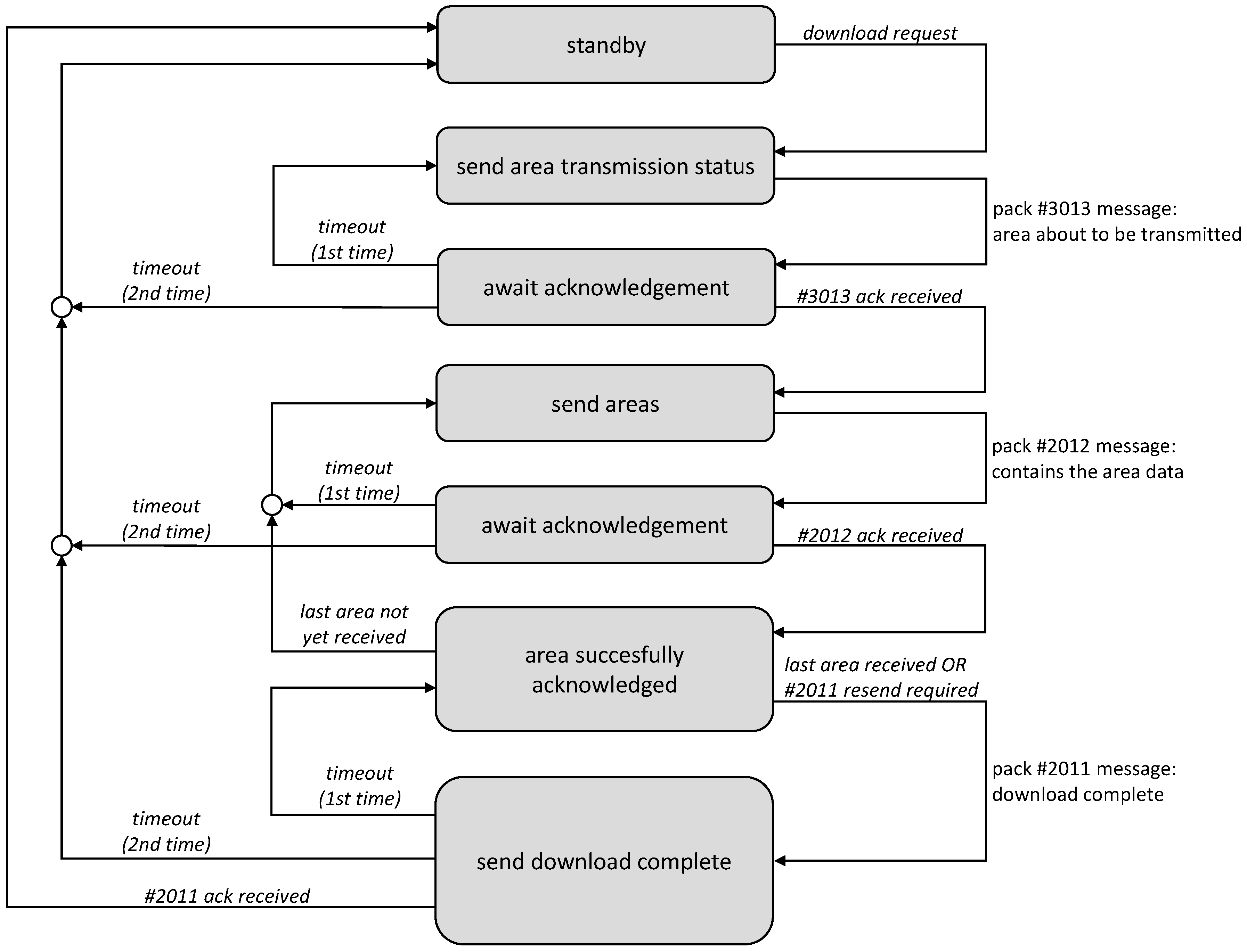
3.1.9. Area Download
3.2. Mission Data Handling on the GCS
4. Simulation Results
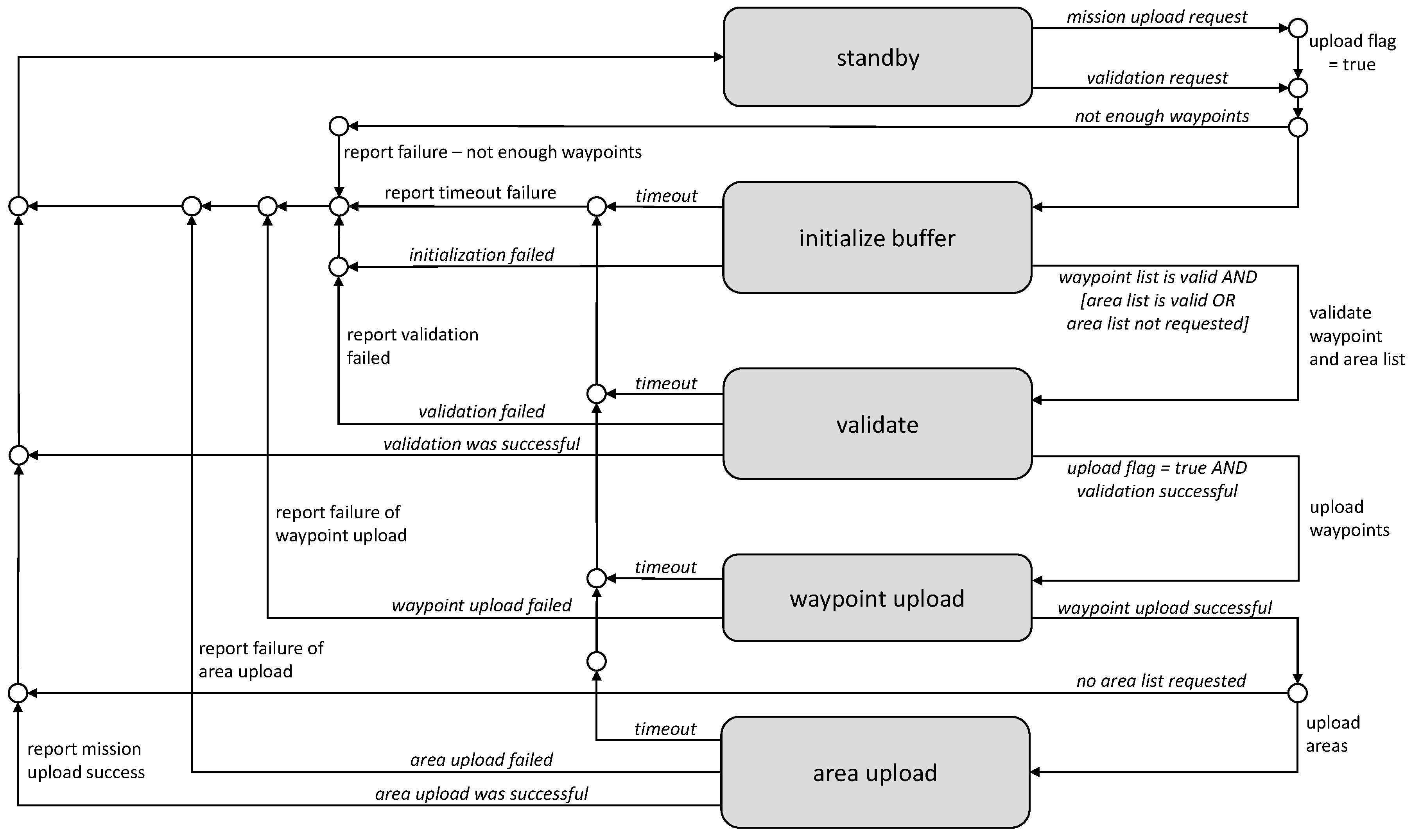
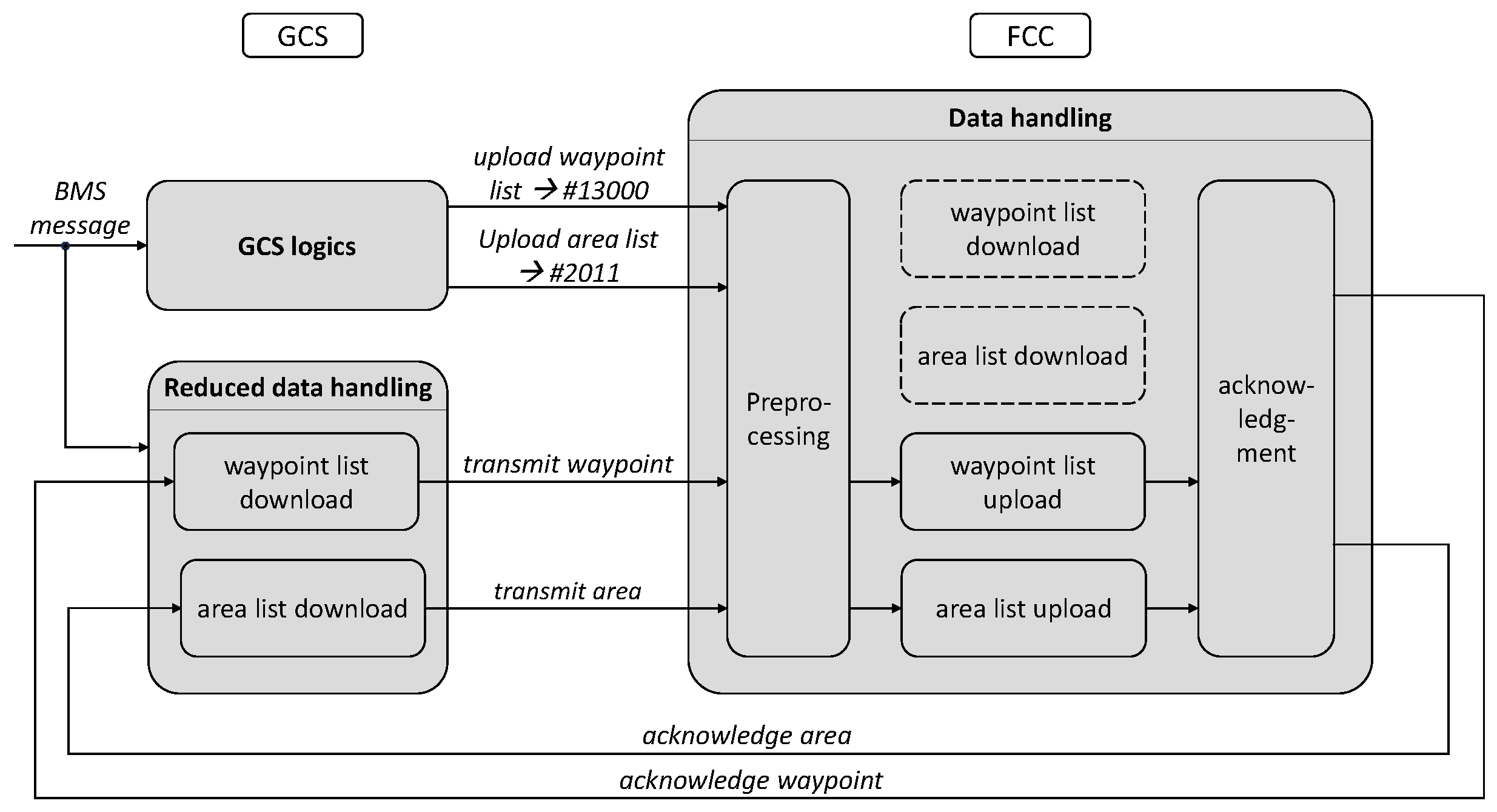
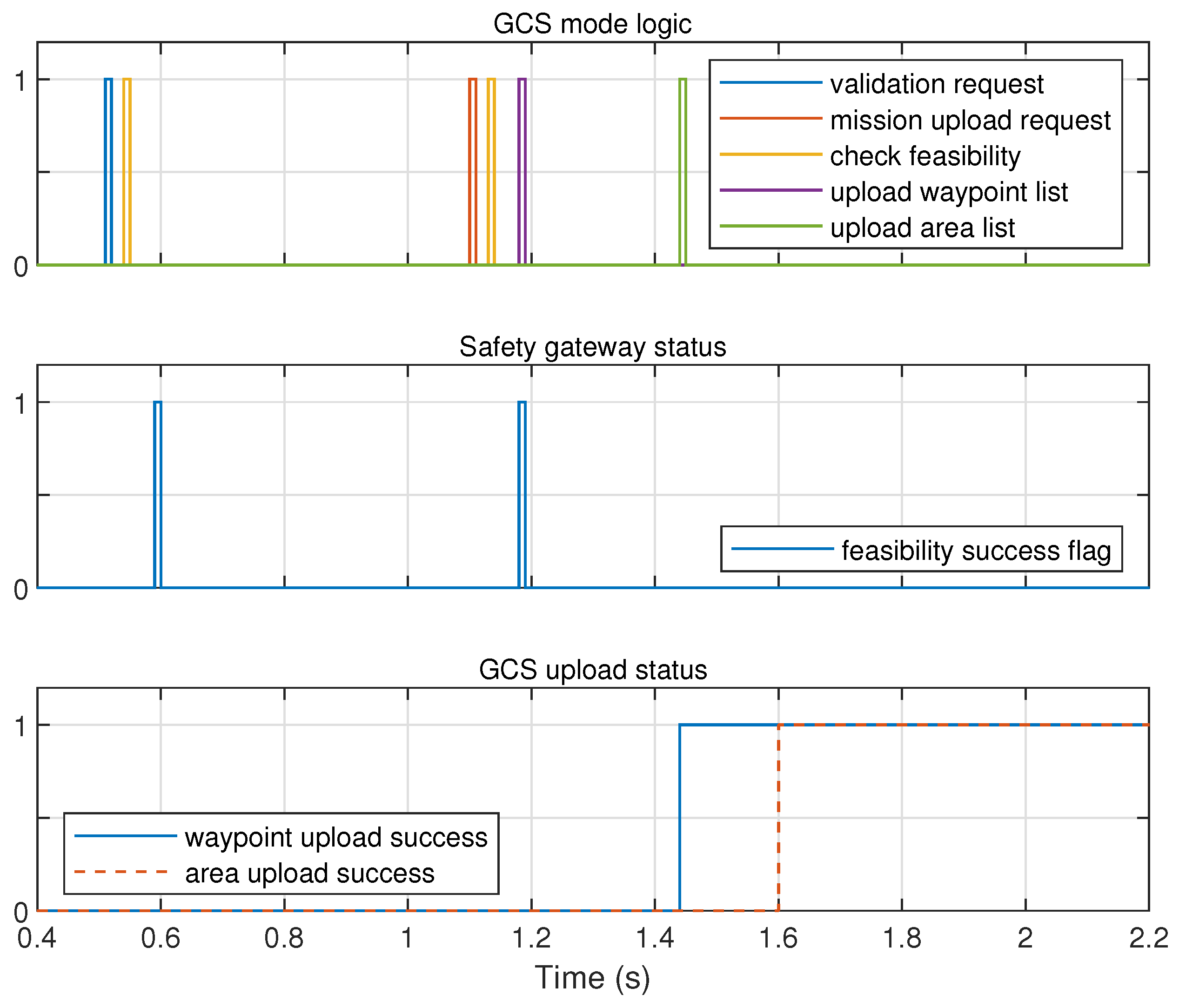
- Validation request: As depicted in Figure 14, the operator initially commands a validation request. The waypoint and area data from the BMS are written into the waypoint and area buffer from where the waypoint and area list are assembled according to Section 3.1.5 and Section 3.1.8. Afterwards, high-level validity checks, such as range checks, are performed on the waypoint and area list to ensure the completeness of the lists. However, the high-level validity checks performed inside the mission data handling do not necessarily result in an overall feasible mission. Additional constraints, such as geographic constraints, power consumption, etc., need to be satisfied, too. Therefore, the feasibility of the entire mission is determined by means of a safety gateway, as shown in Figure 1 and briefly introduced in Section 2.2. The rising signal of the check feasibility flag in Figure 14 triggers the safety gateway and the feasibility success flag confirms the feasibility of the mission. This concludes the validation sequence and the GCS state machine returns into the standby state according to Figure 11.
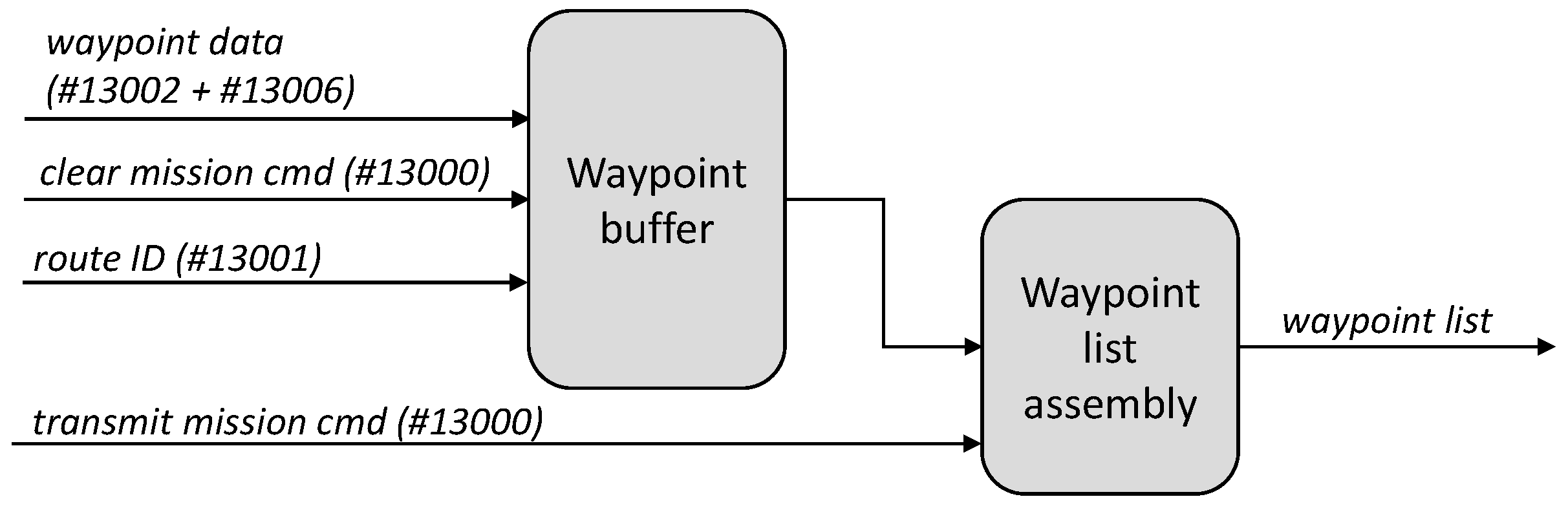
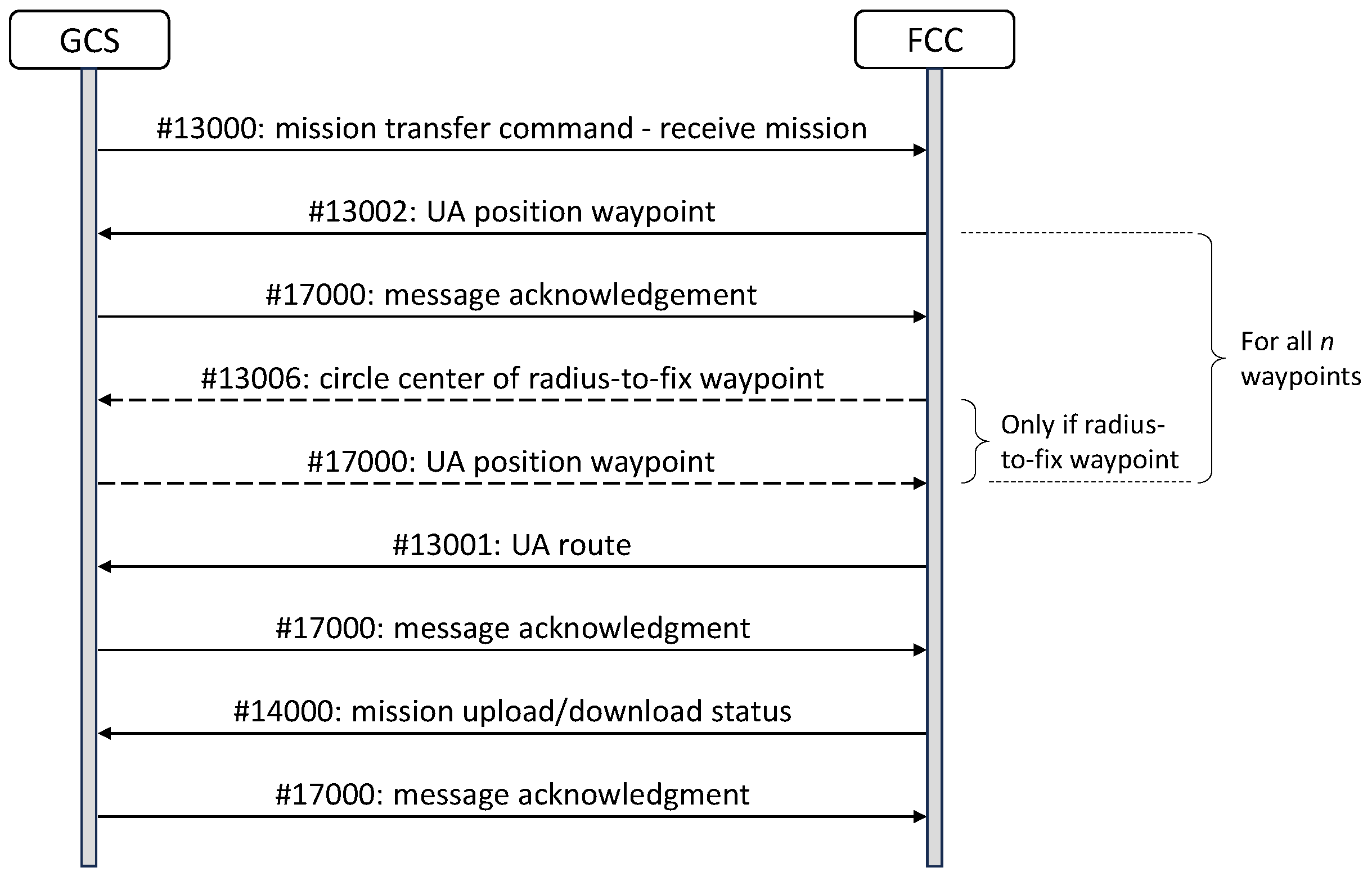
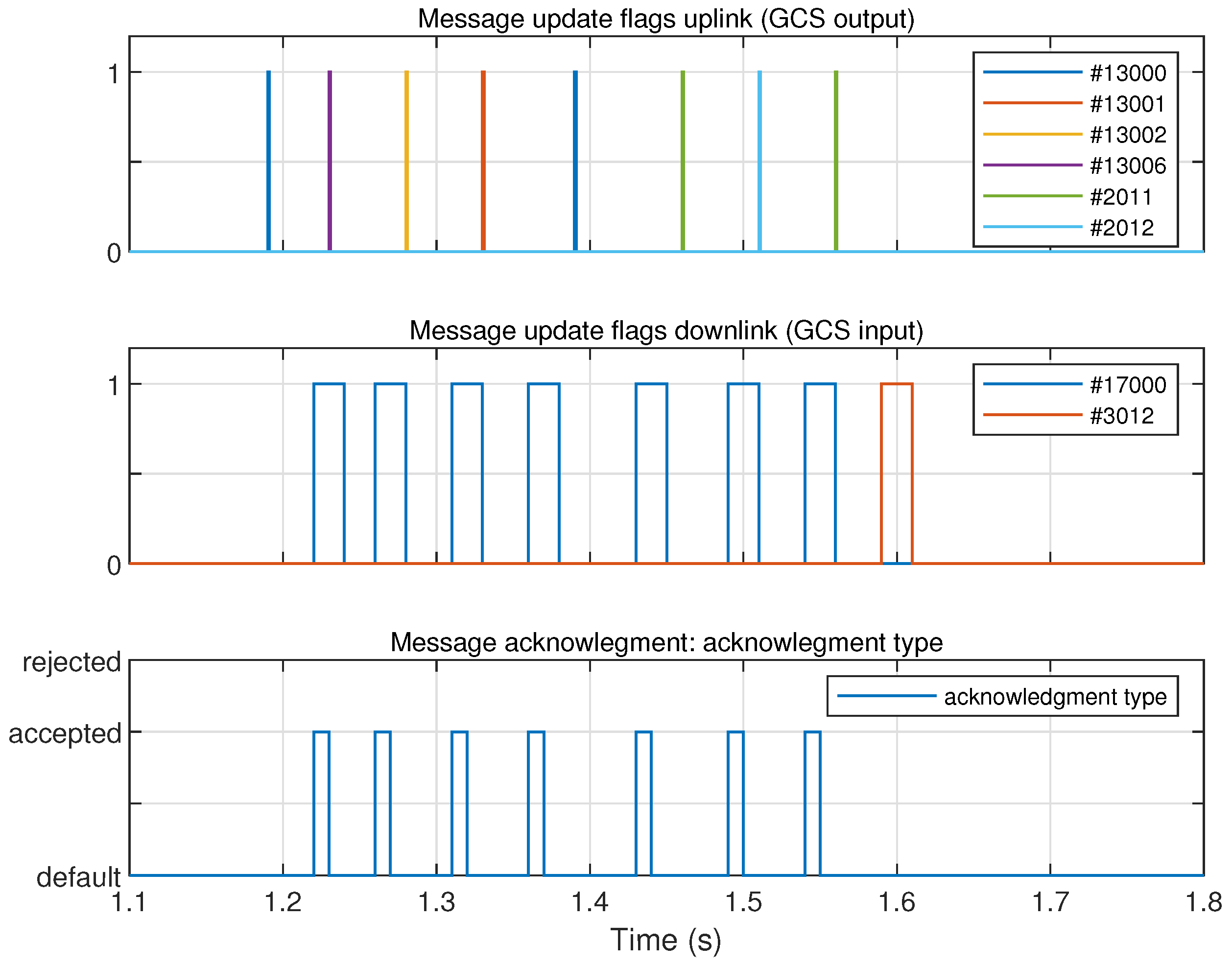
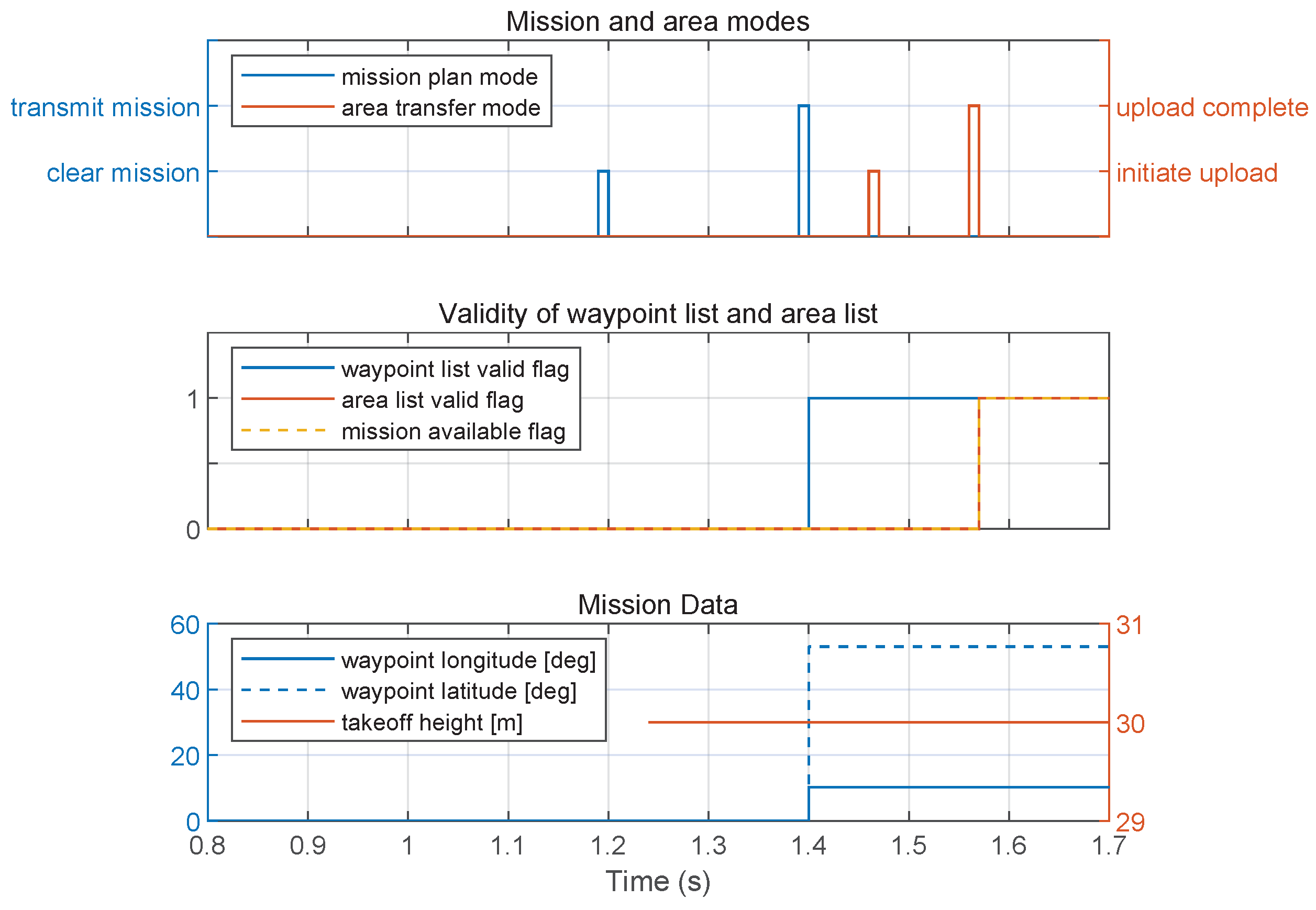
- Mission upload request: According to Figure 14, the operator files a mission upload request at approximately s. As shown in Figure 11, this triggers the mission validation discussed earlier. Furthermore, once validation is successful, e.g., feasibility success flag , the GCS additionally initiates the waypoint upload, which is shown by the rising flag of the upload waypoint list signal. The messages are transmitted according to the sequence depicted in Figure 3. Subsequently, the upload area list flag initiates the area upload according to the message sequence from Figure 7. The waypoint upload success flag and the area upload success flag confirm that all the waypoints and areas are successfully transmitted to the FCC.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AGL | Above-Ground-Level |
| ATOL | Automatic Take-off and Landing |
| BMS | Battle Management System |
| BVLOS | Beyond Visual Line of Sight |
| CCP | Casualty Collection Point |
| eVTOL | Electric Vertical Take-off and Landing |
| FCC | Flight Control Computer |
| FZ | Fly-zone |
| GCS | Ground Control Station |
| HIL | Hardware-in-the-Loop |
| NFZ | No-fly-zone |
| UAV | Unmanned Aerial Vehicle |
| VSM | Vehicle-Specific Module |
References
- Khan, N.A.; Jhanjhi, N.; Brohi, S.N.; Almusaylim, Z.A. Proposing an Algorithm for UAVs Interoperability: MAVLink to STANAG 4586 for Securing Communication. In Intelligent Computing and Innovation on Data Science: Proceedings of ICTIDS 2021; Springer: Singapore, 2021; pp. 413–423. [Google Scholar]
- Dixon, S.R.; Wickens, C.D.; Chang, D. Mission control of multiple unmanned aerial vehicles: A workload analysis. Hum. Factors 2005, 47, 479–487. [Google Scholar] [CrossRef] [PubMed]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Braverman, A. Unmanned aerial systems (UAS) in urban search and rescue-methodology, capacity development, and integration. J. Emerg. Manag. 2021, 19, 33–38. [Google Scholar] [CrossRef] [PubMed]
- MAVLink. Available online: https://mavlink.io/en/ (accessed on 29 December 2023).
- Reichstein, L.; Schopferer, S.; Jünger, F. A Comparison of Command and Control Communication Protocols for Unmanned Aircraft: STANAG 4586 vs. MAVLink. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; IEEE: New York, NY, USA, 2022; pp. 1283–1292. [Google Scholar]
- Rodrigues, A.V.; Carapau, R.S.; Marques, M.M.; Lobo, V.; Coito, F. Unmanned systems interoperability in military maritime operations: MAVLink to STANAG 4586 bridge. In Proceedings of the OCEANS 2017—Aberdeen, Aberdeen, UK, 19–22 June 2017; IEEE: New York, NY, USA, 2017; pp. 1–5. [Google Scholar]
- Standard Interfaces of Unmanned Aircraft (UA) Control System (UCS) for NATO UA Interoperability—Interface Control Document; AEP-84 Volume II, Edition A, Version 1; NATO: Washington, DC, USA, 2017.
- Marques, M.M. STANAG 458—Standard Interfaces of UAV Control System (UCS) for NATO UAV Interoperability; NATO Standardization Agency: Afeite, Portugal, 2012; Volume 14. [Google Scholar]
- Hochstrasser, M.; Krause, C.; Schneider, V.; Holzapfel, F. Model-based Implementation of an Onboard STANAG 4586 Vehicle Specific Module for an Air Vehicle. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Grapevine, TX, USA, 9–13 January 2017; p. 0809. [Google Scholar]
- Frazzetta, S.; Pacino, M. A STANAG 4586 Oriented Approach to UAS Navigation: The Case of Italian Sky-Y Flight Trials. J. Intell. Robot. Syst. 2013, 69, 21–31. [Google Scholar] [CrossRef]
- Damilano, L.; Guglieri, G.; Quagliotti, F.; Sale, I.; Lunghi, A. Ground control station embedded mission planning for UAS. J. Intell. Robot. Syst. 2013, 69, 241–256. [Google Scholar] [CrossRef]
- Heimsch, D.; Söpper, M.; Speckmaier, M.; Mbikayi, Z.; Kellringer, S.; Holzapfel, F. Development and Implementation of a Safety Gateway for a Medical Evacuation eVTOL Aircraft. In Proceedings of the AIAA Aviation and Aeronautics Forum (Aviation 2024), Las Vegas, NV, USA, 29 July–2 August 2024. to be published. [Google Scholar]
- Huber, E.; Bröcker, J.; Rupprecht, T.; Holzapfel, F. Design of the Nominal System Automation of a Cascaded Flight Control Architecture for a Multi-Crew eVTOL Aircraft. In Proceedings of the AIAA Aviation and Aeronautics Forum (Aviation 2024), Las Vegas, NV, USA, 29 July–2 August 2024. to be published. [Google Scholar]
- Schneider, V.; Piprek, P.; Schatz, S.P.; Baier, T.; Dörhöfer, C.; Hochstrasser, M.; Gabrys, A.; Karlsson, E.; Krause, C.; Lauffs, P.J.; et al. Online trajectory generation using clothoid segments. In Proceedings of the 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016; IEEE: New York, NY, USA, 2016; pp. 1–6. [Google Scholar]
- Schneider, V. Trajectory Generation for Integrated Flight Guidance. Ph.D. Thesis, Technische Universität München, Munich, Germany, 2018. [Google Scholar]
- Mbikayi, Z.; Steinert, A.; Heimsch, D.; Speckmaier, M.; Rudolph, P.; Liu, H.; Holzapfel, F. Online Deterministic 3D Trajectory Generation for eVTOL Applications. Aerospace, 2023; to be published. [Google Scholar]
- Scherer, S.; Mishra, C.; Holzapfel, F. Extension of the capabilities of an automatic landing system with procedures motivated by visual-flight-rules. In Proceedings of the 33rd Congress of the International Council of the Aeronautical Sciences (ICAS), Stockholm, Sweden, 4–9 September 2022. [Google Scholar]
- Piprek, P.; Marb, M.M.; Bhardwaj, P.; Holzapfel, F. Trajectory/path-following controller based on nonlinear jerk-level error dynamics. Appl. Sci. 2020, 10, 8760. [Google Scholar] [CrossRef]
- Avilus. Available online: https://avilus.com/ (accessed on 28 December 2023).
- Systematic. SitaWare Frontline. Available online: https://systematic.com/en-gb/industries/defence/products/sitaware-suite/sitaware-frontline/ (accessed on 22 December 2023).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Message Identifier | Message Name | Description |
|---|---|---|
| #13000 | mission transfer command | specifies an action, e.g., mission clear, mission transmit, and mission receive |
| #13001 | UA route | specifies the route ID, the initial waypoint number, and the bidirectionality of a route |
| #13002 | UA position waypoint | specifies the waypoint location, speed, and additional properties, such as the leg type |
| #13006 | vehicle specific waypoint | used for the transmission of the take-off height and the circle center of radius-to-fix waypoints |
| #14000 | mission upload/download status | used to indicate mission download success/failure |
| #4001 | FROM-TO-NEXT waypoint states | dowlink message providing the current FROM, TO and NEXT waypoint |
| #2011 | area transmission command | triggers an area upload/download and indicates the completion of an area upload/download |
| #2012 | area polygon loop segment message | specifies the vertices of FZs and NFZs |
| #3012 | area status alert message | reports success/failure of an area upload |
| #3013 | area transmission status | downlink status message specifying the number of areas and the safety offset |
| #17000 | message acknowledgement | used for handshake between GCS and FCC reporting transmission success/failure |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heimsch, D.; Speckmaier, M.; Gierszewski, D.; Schwaiger, F.; Mbikayi, Z.; Holzapfel, F. Development and Implementation of a Mission Data-Handling Algorithm for an Automatic Flight Guidance System. Aerospace 2024, 11, 115. https://doi.org/10.3390/aerospace11020115
Heimsch D, Speckmaier M, Gierszewski D, Schwaiger F, Mbikayi Z, Holzapfel F. Development and Implementation of a Mission Data-Handling Algorithm for an Automatic Flight Guidance System. Aerospace. 2024; 11(2):115. https://doi.org/10.3390/aerospace11020115
Chicago/Turabian StyleHeimsch, Dominik, Moritz Speckmaier, Daniel Gierszewski, Florian Schwaiger, Zoe Mbikayi, and Florian Holzapfel. 2024. "Development and Implementation of a Mission Data-Handling Algorithm for an Automatic Flight Guidance System" Aerospace 11, no. 2: 115. https://doi.org/10.3390/aerospace11020115
APA StyleHeimsch, D., Speckmaier, M., Gierszewski, D., Schwaiger, F., Mbikayi, Z., & Holzapfel, F. (2024). Development and Implementation of a Mission Data-Handling Algorithm for an Automatic Flight Guidance System. Aerospace, 11(2), 115. https://doi.org/10.3390/aerospace11020115