1. Introduction
Valley path planning on 3D terrain is an important research area in the field of robotics and autonomous systems, focusing on developing algorithms and methods for planning optimal paths in complex three-dimensional landscapes [
1]. The emergence of this research area is driven by the increasing use of autonomous vehicles and robots in exploration, agriculture, search and rescue, and other applications that require navigation in complex natural environments. Valleys and similar terrains present unique challenges for path planning, as they often feature irregular and steep topography, limited visibility, and unpredictable environmental conditions. Traditional path planning methods, such as the A* algorithm, may not be suitable for these environments, as valley spaces are typically complex and non-convex. Research in the field of valley path planning aims to address these challenges by developing specialized algorithms that take into account specific features of valley terrain, such as narrow passages, potential dead ends, and varying slopes. By leveraging techniques from computational geometry, machine learning, and computer vision, researchers strive to create path planning algorithms that can efficiently traverse valley terrain while considering factors such as energy consumption, stability, and terrain traversability.
The research on valley path planning for aircraft holds significant importance, as aircraft often need to traverse various terrains, including complex landscapes such as valleys and canyons during flight. Planning optimal paths in these terrains is crucial for the safety and efficiency of aircraft.Furthermore, there is increasing attention on the autonomous control and navigation systems of aircraft, as these systems can enhance the safety, reliability, and efficiency of flights. The use of valley path planning methods on aircraft can help the autonomous control and navigation systems better adapt to complex terrains, thereby improving the safety and efficiency of flights. For unmanned aerial vehicles (UAVs), utilizing valley path planning can enhance accurate navigation through intricate landscapes while decreasing dependence on human operators. In military and civilian applications, UAVs are utilized for tasks such as reconnaissance, surveillance, and delivery, making it crucial to ensure that UAVs can accurately and safely traverse valleys and other complex terrains in these missions. In summary, the research background of applying valley path planning algorithms on aircraft includes the demand for autonomous navigation and control systems for aircraft, the requirements for flight safety, reliability, and efficiency, and the widespread deployment of drones in both military and civilian contexts.
When designing robots for outdoor settings, it is essential to take terrain characteristics into account during the route-planning process. C. Saranya et al. [
2] introduced an enhanced version of the D* path planning algorithm. This method incorporates not only the distance to be covered but also an assessment of the terrain slope in the cost function calculations to determine the optimal path. Yoshitaka et al. [
3] developed a technique for eliminating moving objects and constructing maps to facilitate path planning in three-dimensional environments. Their approach features a map type called surface mesh maps, created from 3D LIDAR data through a graph-based SLAM process that includes moving object removal and polygon mesh reconstruction. The key innovation of this technique lies in its integration of SLAM with object removal and graph search methods for navigating expansive 3D terrains. Experimental results from traversing over 5 km in dynamic outdoor settings demonstrated the effectiveness of this method in both object removal and surface mesh mapping for three-dimensional path planning. Cheng et al. [
4] created a UAV route optimization technique designed to achieve the necessary image overlap and enhance flight paths for reconstructing digital terrain models (DTMs). Their findings indicated that this path-planning approach could cut UAV flight time for capturing images of the Put-tun-pu-nas debris fan by 18.5%. Boris et al. [
5] focused on optimizing path planning for UAVs operating in a stable risk-free environment within three-dimensional space. Meanwhile, Zhan et al. [
6] presented an optimized A* algorithm designed for real-time UAV navigation in extensive battlefield settings, addressing the need for high survival rates and reduced fuel usage. The authors evaluated their algorithm across an area of around 2,500,000 square meters, which included radar systems, restricted zones, and harsh weather conditions, to assess its practicality, reliability, and effectiveness. Sedat et al. [
7] applied a genetic algorithm to enhance the solution for the CPP problem by focusing on energy efficiency while considering natural terrain factors such as obstacles and elevation changes. Field experiments validated their energy consumption model for the robot, and simulation findings demonstrated that their method successfully lowers the energy usage of a mobile robot engaged in CPP tasks. D.L. Page et al. [
8] introduced a strategic path planning technique designed for unmanned vehicles to either maximize visibility by traveling along ridges or enhance stealth by moving through valleys in a 3D terrain. The approach aims to create routes that optimize either surveillance or covert operations based on the vehicle’s position within the terrain. Pablo et al. [
9] developed an innovative heuristic path planning method called 3Dana. This algorithm aims to create long-term routes by taking into account the terrain’s relief. To showcase the effectiveness of 3Dana, the authors conducted comparisons with several other algorithms, including A*, Field D*, and Theta*, using traversability cost maps. The results indicate that 3Dana yields favorable outcomes, albeit with a longer search duration. Francis et al. [
10] introduced a system capable of planning and navigating a route in intricate environments based on input from noisy sensors. Rekha et al. [
11] introduced an innovative motion planning algorithm tailored designed for a six-wheeled robot featuring 10 degrees of freedom, enhancing the traditional potential field approach by incorporating a gradient function. The revised potential field comprises attractive, repulsive, tangential, and gradient forces. Both simulation and experimental findings demonstrate the effectiveness of this method in creating paths across challenging terrains.
However, the aforementioned algorithm exhibits poor global search capability, especially when dealing with large-scale 3D elevation maps. It also shows limited robustness, as specific algorithms can only address particular workspaces, and it cannot handle path search problems with multiple constraints and optimization objectives.
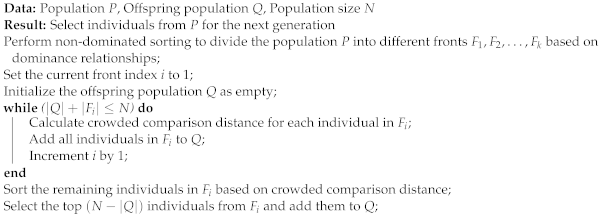
NSGA-II is designed for optimizing multiple objectives and developed to handle problems involving several competing objectives. Building upon the principles of genetic algorithms, NSGA-II aims to find a set of solutions that are non-dominated by any other solutions, meaning there are no better solutions that simultaneously improve all objectives. It achieves this by employing non-dominated sorting and crowding distance operator to maintain diversity within the population, thus providing an efficient and balanced set of solutions for multi-objective optimization problems. NSGA-II has proven to be a powerful tool for tackling complex real-world problems in various domains such as engineering design, resource allocation, and decision support systems. The NSGA-II algorithm has several advantages. Firstly, it is capable of efficiently handling multi-objective optimization problems by simultaneously optimizing multiple conflicting objectives. Secondly, NSGA-II employs a fast and elitist non-dominated sorting approach, which allows it to maintain a diverse set of solutions along the Pareto front. Additionally, NSGA-II utilizes a crowding distance to promote solution diversity, enabling it to effectively explore and maintain a well-distributed set of non-dominated solutions. These characteristics make NSGA-II a robust and widely algorithm utilized for addressing multiple objective optimization issues, offering a good balance between convergence and diversity in the obtained solutions.
Nikolas et al. [
12] presented a comprehensive strategy to address the Multi-Objective Path Planning (MOPP) challenge for UAVs navigating in a vast 3D urban landscape. They introduced an energy and noise model for UAVs to follow a continuous 3D trajectory, utilizing the NSGA-II algorithm for optimization. This approach was tested in a practical 3D urban planning scenario in New York City, leveraging real-world data from OpenStreetMap. The study in [
13] introduced an improved NSGA-II algorithm designed to address the multi-objective path planning challenge for UAVs in authentic 3D environments, aiming to identify a safe and energy-efficient route. Experimental results demonstrate that the enhanced NSGA-II (ENSGAII) exhibits superior convergence rates and solution diversity across various new real-world datasets. Ren et al. [
14] introduced a multi-objective path planning (MOPP) method utilizing the NSGA-II algorithm to determine an ideal collision-free trajectory for UAVs, factoring in distance. Their experiments show that this method efficiently identifies optimal paths in urban settings using octrees. The work presented in [
15] introduces an enhanced version of the NSGA-II algorithm (INSGA-II) aimed at tackling multi-objective path planning challenges by concurrently optimizing path length, safety, and smoothness. Simulation findings reveal that INSGA-II effectively addresses these multi-objective path planning issues with notable efficiency. Carlos et al. [
16] introduced a novel system designed to assist with multi-objective path planning for gliders in actual missions. This system integrates a path simulator with the NSGA-II genetic algorithm, generating a range of Pareto-optimal solutions focused on two main objectives: distance to the goal and trajectory safety. Various experiments were conducted to thoroughly evaluate the proposed system. The findings indicate that it can efficiently identify multiple Pareto-optimal solutions in scenarios with static obstacles. Furthermore, this approach is practical for real missions, as it does not require high-end computing resources. In the study [
17], a NSGA-II method for optimizing spray trajectories is introduced. The effectiveness of this method is validated on actual automotive surfaces, with results demonstrating its capability in addressing trajectory planning challenges on intricate surfaces. In [
18], a many-objective optimization model for cooperative UAV trajectory planning is presented. This model aims to optimize various factors including trajectory distance, time, threat levels, and coordination costs. To address traditional trajectory planning issues, the NSGA-III algorithm is employed. Additionally, the study introduces a segmented crossover technique and a dynamic crossover probability in the crossover operator to enhance the model’s efficiency and speed up the algorithm’s convergence. Experimental outcomes validate the effectiveness of this multi-UAV cooperative trajectory planning method in meeting diverse practical requirements. P.B. Muilk [
19] introduced an innovative trajectory planning method for the PUMA 560 robot manipulator, utilizing an evolutionary algorithm. This approach, based on the elitist non-dominated sorting genetic algorithm (NSGA-II), stands out due to its ability to optimize multiple criteria concurrently.
The current research on valley line path planning faces the following issues: first, although there has been considerable study on 3D terrains, research specifically focused on valley line path planning, especially in multi-objective optimization under various constraints, remains limited. Second, existing valley point path planning algorithms exhibit low efficiency in processing valley points, resulting in overall low planning efficiency and longer planning times. Furthermore, the existing algorithms for 3D terrain path planning lack sufficient planning efficiency and often become trapped in local optima, producing suboptimal paths. To address these issues, this study introduces an algorithm for planning valley paths that is grounded in NSGA-II designed for 3D terrains. Firstly, the problem statement is defined. Secondly, the NSGA-II-based valley path planning algorithm is introduced. Within the NSGA-II-based valley path planning algorithm, the NSGA-II Algorithm is first described, followed by the valley path planning algorithm on 3D terrains designed using the NSGA-II algorithm. Subsequently, the algorithm validation is conducted in the experimental study. In the experimental study, workspaces using three DEM datasets are first introduced, followed by the demonstration of validation results based on the three datasets and four algorithms (the NSGA-II based valley path planning algorithm and three baseline algorithms).
This paper is organized as follows: In
Section 2, we define the problem of valley path planning using mathematical symbols. In
Section 3, we introduce the NSGA-II-based algorithm, including an overview of NSGA-II algorithms and how to apply NSGA-II to valley path planning problems. In
Section 4, we conduct experiments on three datasets using four different algorithms (NSGA-II-based valley path planning algorithm and three other baseline algorithms). Conclusions are drawn in
Section 5.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}