
An Online Data-Driven Method for Accurate Detection of Thermal Updrafts Using SINDy



Abstract
1. Introduction
2. Updraft Estimation
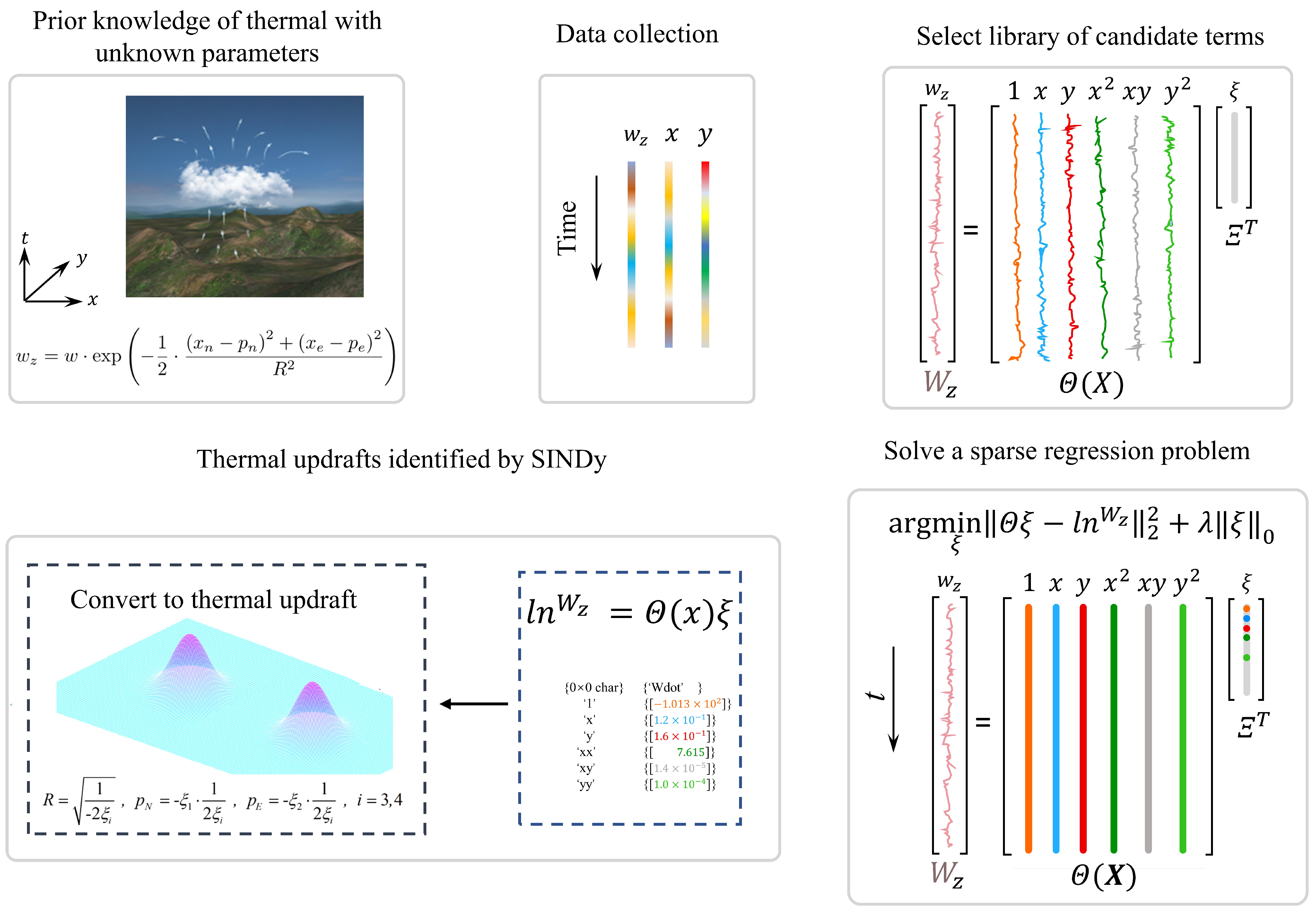
3. Sparse Identification of Nonlinear Dynamics for Thermal Updrafts
| Algorithm 1: SINDy for themal identification. |
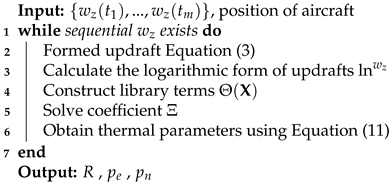 |
4. Results
4.1. Particle-Filter-Based Method
4.2. Experimental Setup
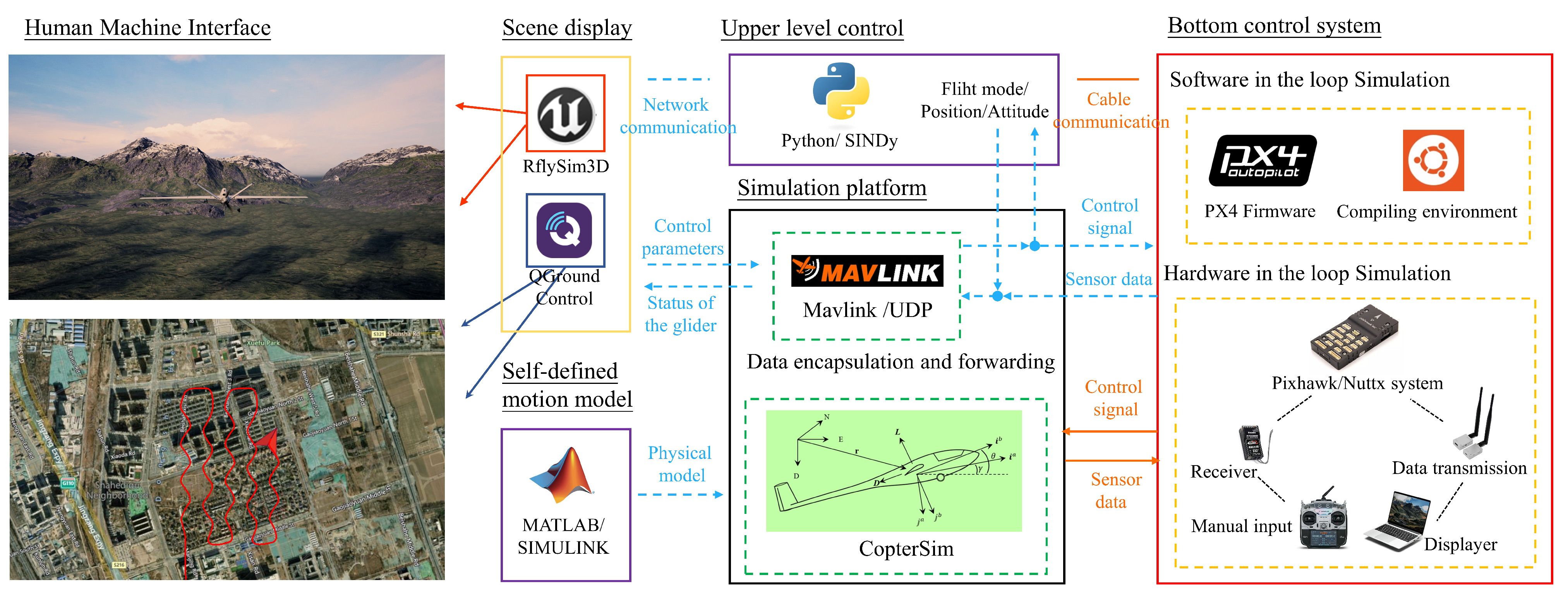
4.2.1. Software-in-the-Loop Simulations
4.2.2. Hardware-in-the-Loop Simulations
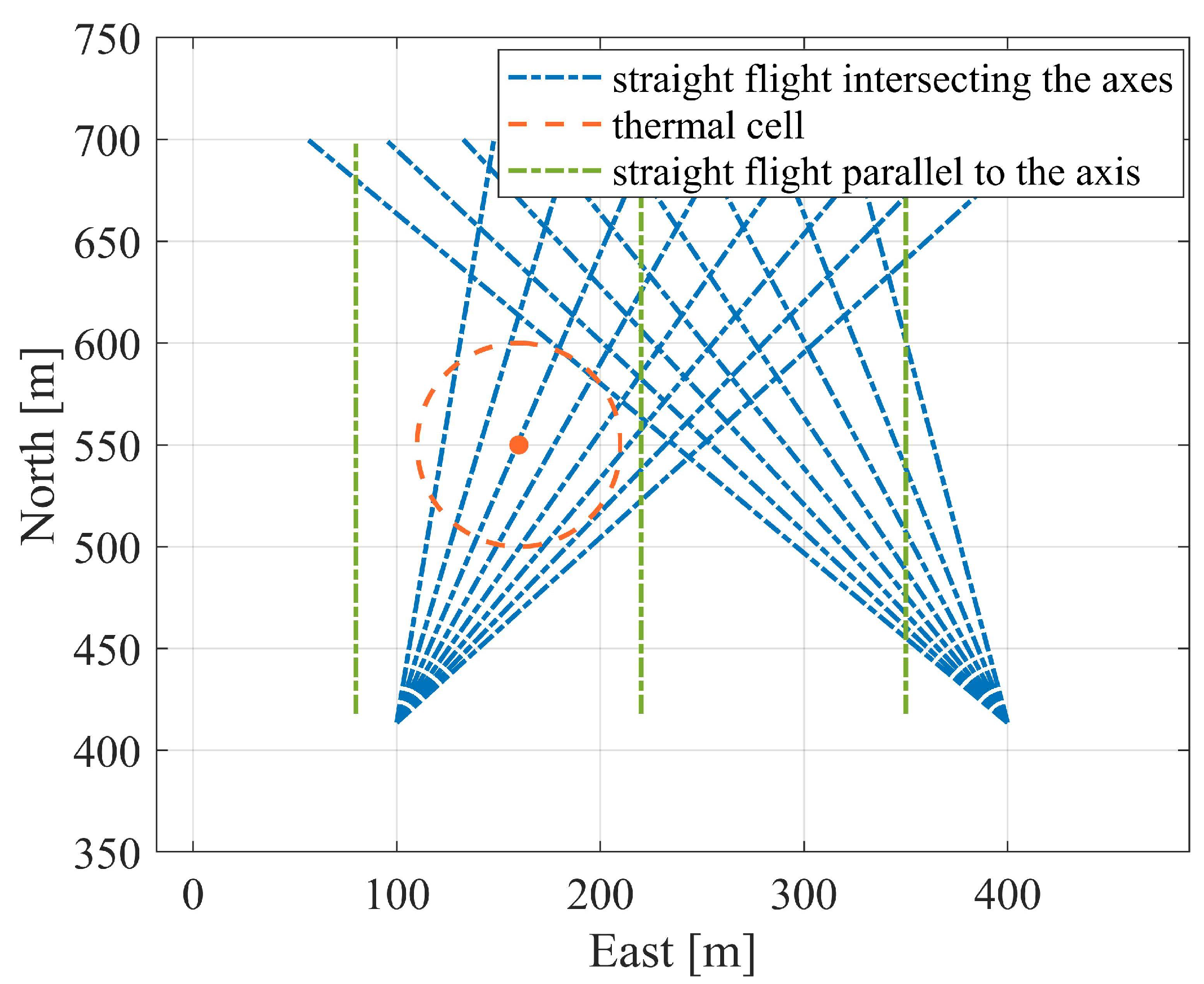
4.3. Identification of Partial Parameters in Unobservable Conditions
4.4. Parameter Identification in Observable Conditions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ismael, R.Q.; Henari, Q.Z. Accuracy assessment of UAV photogrammetry for large scale topographic mapping. In Proceedings of the 2019 International Engineering Conference (IEC), Erbil, Iraq, 23–25 June 2019; IEEE: New York, NY, USA, 2019; pp. 1–5. [Google Scholar]
- Casbeer, D.W.; Beard, R.W.; McLain, T.W.; Li, S.M.; Mehra, R.K. Forest fire monitoring with multiple small UAVs. In Proceedings of the 2005, American Control Conference, Portland, OR, USA, 8–10 June 2005; IEEE: New York, NY, USA, 2005; pp. 3530–3535. [Google Scholar]
- Lu, Z.; Hong, H.; Diepolder, J.; Holzapfel, F. Maneuverability Set Estimation and Trajectory Feasibility Evaluation for eVTOL Aircraft. J. Guid. Control. Dyn. 2023, 46, 1184–1196. [Google Scholar] [CrossRef]
- Sachs, G.; Grüter, B.; Hong, H. Performance enhancement by wing sweep for high-speed dynamic soaring. Aerospace 2021, 8, 229. [Google Scholar] [CrossRef]
- Hong, H.; Piprek, P.; Afonso, R.J.M.; Holzapfel, F. Trigonometric series-based smooth flight trajectory generation. IEEE Trans. Aerosp. Electron. Syst. 2020, 57, 721–728. [Google Scholar] [CrossRef]
- Hong, H.; Maity, A.; Holzapfel, F.; Tang, S.; Wang, M. Smooth interpolation-based fixed-final-time command generation. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3039–3049. [Google Scholar] [CrossRef]
- Ramm, J.; Rahn, A.; Silberhorn, D.; Wicke, K.; Wende, G.; Papantoni, V.; Linke, F.; Kühlen, M.; Dahlmann, K. Assessing the Feasibility of Hydrogen-Powered Aircraft: A Comparative Economic and Environmental Analysis. J. Aircr. 2024, 1–17. [Google Scholar] [CrossRef]
- Liu, Y.; Van Schijndel, J.; Longo, S.; Kerrigan, E.C. UAV energy extraction with incomplete atmospheric data using MPC. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1203–1215. [Google Scholar] [CrossRef]
- Hong, H.; Liu, L.; Holzapfel, F.; Sachs, G. Dynamic soaring under different atmospheric stability conditions. J. Guid. Control. Dyn. 2023, 46, 970–977. [Google Scholar] [CrossRef]
- El Tin, F.; Patience, C.; Borowczyk, A.; Nahon, M.; Sharf, I. Exploitation of thermals in powered and unpowered flight of autonomous gliders. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; IEEE: New York, NY, USA, 2021; pp. 1089–1095. [Google Scholar]
- Jacobs, S.; Gu, Y. Autonomous Soaring Simulation and Glider System Development. In Proceedings of the 2023 International Conference on Unmanned Aircraft Systems (ICUAS), Warsaw, Poland, 6–9 June 2023; IEEE: New York, NY, USA, 2023; pp. 354–359. [Google Scholar]
- Fisher, A.; Marino, M.; Clothier, R.; Watkins, S.; Peters, L.; Palmer, J.L. Emulating avian orographic soaring with a small autonomous glider. Bioinspir. Biomim. 2015, 11, 016002. [Google Scholar] [CrossRef]
- Khaghani, J.; Nekoui, M.; Nasiri, R.; Ahmadabadi, M.N. Analytical model of thermal soaring: Towards energy efficient path planning for flying robots. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: New York, NY, USA, 2018; pp. 7589–7594. [Google Scholar]
- Zhang, Y.; Li, K.; Liu, J. Intelligent prediction method for updraft of UAV that is based on LSTM network. IEEE Trans. Cogn. Dev. Syst. 2020, 15, 464–475. [Google Scholar] [CrossRef]
- Ákos, Z.; Nagy, M.; Vicsek, T. Comparing bird and human soaring strategies. Proc. Natl. Acad. Sci. USA 2008, 105, 4139–4143. [Google Scholar] [CrossRef]
- Allen, M.J.; Lin, V. Guidance and Control of an Autonomous Soaring UAV; Technical Report; 2007. Available online: https://ntrs.nasa.gov/citations/20070022339 (accessed on 15 August 2024).
- Edwards, D. Implementation details and flight test results of an autonomous soaring controller. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; p. 7244. [Google Scholar]
- Edwards, D.J.; Silverberg, L.M. Autonomous soaring: The Montague cross-country challenge. J. Aircr. 2010, 47, 1763–1769. [Google Scholar] [CrossRef]
- Kahn, A.D. Atmospheric thermal location estimation. J. Guid. Control. Dyn. 2017, 40, 2363–2369. [Google Scholar] [CrossRef]
- Bird, J.J.; Langelaan, J.W. Spline mapping to maximize energy exploitation of non-uniform thermals. In Proceedings of the Presented at the XXXI OSTIV Congress, Uvalde, TX, USA, 8–15 August 2012; Volume 8, p. 15. [Google Scholar]
- Stolle, M.; Watanabe, Y.; Döll, C.; Bolting, J. Vision-based lifespan and strength estimation of sub-cumulus thermal updrafts for autonomous soaring. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; IEEE: New York, NY, USA, 2016; pp. 162–169. [Google Scholar]
- Notter, S.; Groß, P.; Schrapel, P.; Fichter, W. Multiple thermal updraft estimation and observability analysis. J. Guid. Control. Dyn. 2020, 43, 490–503. [Google Scholar] [CrossRef]
- Ahmad, A.; Lima, P. Multi-robot cooperative spherical-object tracking in 3D space based on particle filters. Robot. Auton. Syst. 2013, 61, 1084–1093. [Google Scholar] [CrossRef]
- Notter, S.; Gall, C.; Müller, G.; Ahmad, A.; Fichter, W. Deep Reinforcement Learning Approach for Integrated Updraft Mapping and Exploitation. J. Guid. Control. Dyn. 2023, 46, 1997–2004. [Google Scholar] [CrossRef]
- Wharington, J. Autonomous Control of Soaring Aircraft by Reinforcement Learning. Ph.D. Thesis, Royal Melbourne Institute of Technology, Melbourne, Australia, 1998. [Google Scholar]
- Langelaan, J.W. Gust energy extraction for mini and micro uninhabited aerial vehicles. J. Guid. Control. Dyn. 2009, 32, 464–473. [Google Scholar] [CrossRef]
- Allen, M. Updraft model for development of autonomous soaring uninhabited air vehicles. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 9–12 January 2006; p. 1510. [Google Scholar]
- Bencatel, R.; de Sousa, J.T.; Girard, A. Atmospheric flow field models applicable for aircraft endurance extension. Prog. Aerosp. Sci. 2013, 61, 1–25. [Google Scholar] [CrossRef]
- Lawrance, N.; Sukkarieh, S. Wind energy based path planning for a small gliding unmanned aerial vehicle. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 6112. [Google Scholar]
- Reddy, G.; Celani, A.; Sejnowski, T.J.; Vergassola, M. Learning to soar in turbulent environments. Proc. Natl. Acad. Sci. USA 2016, 113, E4877–E4884. [Google Scholar] [CrossRef]
- Tin, F.E.; Borowczyk, A.; Sharf, I.; Nahon, M. Turn decisions for autonomous thermalling of unmanned aerial gliders. J. Intell. Robot. Syst. 2022, 104, 25. [Google Scholar] [CrossRef]
- Andersson, K.; Kaminer, I.; Dobrokhodov, V.; Cichella, V. Thermal centering control for autonomous soaring; stability analysis and flight test results. J. Guid. Control. Dyn. 2012, 35, 963–975. [Google Scholar] [CrossRef]
- Tabor, S.; Guilliard, I.; Kolobov, A. ArduSoar: An open-source thermalling controller for resource-constrained autopilots. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: New York, NY, USA, 2018; pp. 6255–6262. [Google Scholar]
- Depenbusch, N.T.; Bird, J.J.; Langelaan, J.W. The AutoSOAR autonomous soaring aircraft part 2: Hardware implementation and flight results. J. Field Robot. 2018, 35, 435–458. [Google Scholar] [CrossRef]
- Depenbusch, N.T.; Bird, J.J.; Langelaan, J.W. The AutoSOAR autonomous soaring aircraft, part 1: Autonomy algorithms. J. Field Robot. 2018, 35, 868–889. [Google Scholar] [CrossRef]
- Hong, H.; Wang, M.; Holzapfel, F.; Tang, S. Fast real-time three-dimensional wind estimation for fixed-wing aircraft. Aerosp. Sci. Technol. 2017, 69, 674–685. [Google Scholar] [CrossRef]
- Kaptanoglu, A.A.; Morgan, K.D.; Hansen, C.J.; Brunton, S.L. Physics-constrained, low-dimensional models for magnetohydrodynamics: First-principles and data-driven approaches. Phys. Rev. E 2021, 104, 015206. [Google Scholar] [CrossRef] [PubMed]
- Brunton, S.L.; Kutz, J.N. Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
- Kaiser, E.; Kutz, J.N.; Brunton, S.L. Sparse identification of nonlinear dynamics for model predictive control in the low-data limit. Proc. R. Soc. A 2018, 474, 20180335. [Google Scholar] [CrossRef]
- Guan, Y.; Brunton, S.L.; Novosselov, I. Sparse nonlinear models of chaotic electroconvection. R. Soc. Open Sci. 2021, 8, 202367. [Google Scholar] [CrossRef]
- Fasel, U.; Kutz, J.N.; Brunton, B.W.; Brunton, S.L. Ensemble-SINDy: Robust sparse model discovery in the low-data, high-noise limit, with active learning and control. Proc. R. Soc. A 2022, 478, 20210904. [Google Scholar] [CrossRef]
- Gelß, P.; Klus, S.; Eisert, J.; Schütte, C. Multidimensional approximation of nonlinear dynamical systems. J. Comput. Nonlinear Dyn. 2019, 14, 061006. [Google Scholar] [CrossRef]
- Wettengl, N.; Notter, S.; Fichter, W. Enhancing updraft observability by optimal path planning. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 2216. [Google Scholar]
- Dai, X.; Quan, Q.; Ren, J.; Cai, K.Y. An analytical design-optimization method for electric propulsion systems of multicopter UAVs with desired hovering endurance. IEEE/ASME Trans. Mechatron. 2019, 24, 228–239. [Google Scholar] [CrossRef]
- Quan, Q.; Dai, X.; Wang, S. Multicopter Design and Control Practice: A Series Experiments Based on MATLAB and Pixhawk; Springer: Singapore, 2020. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
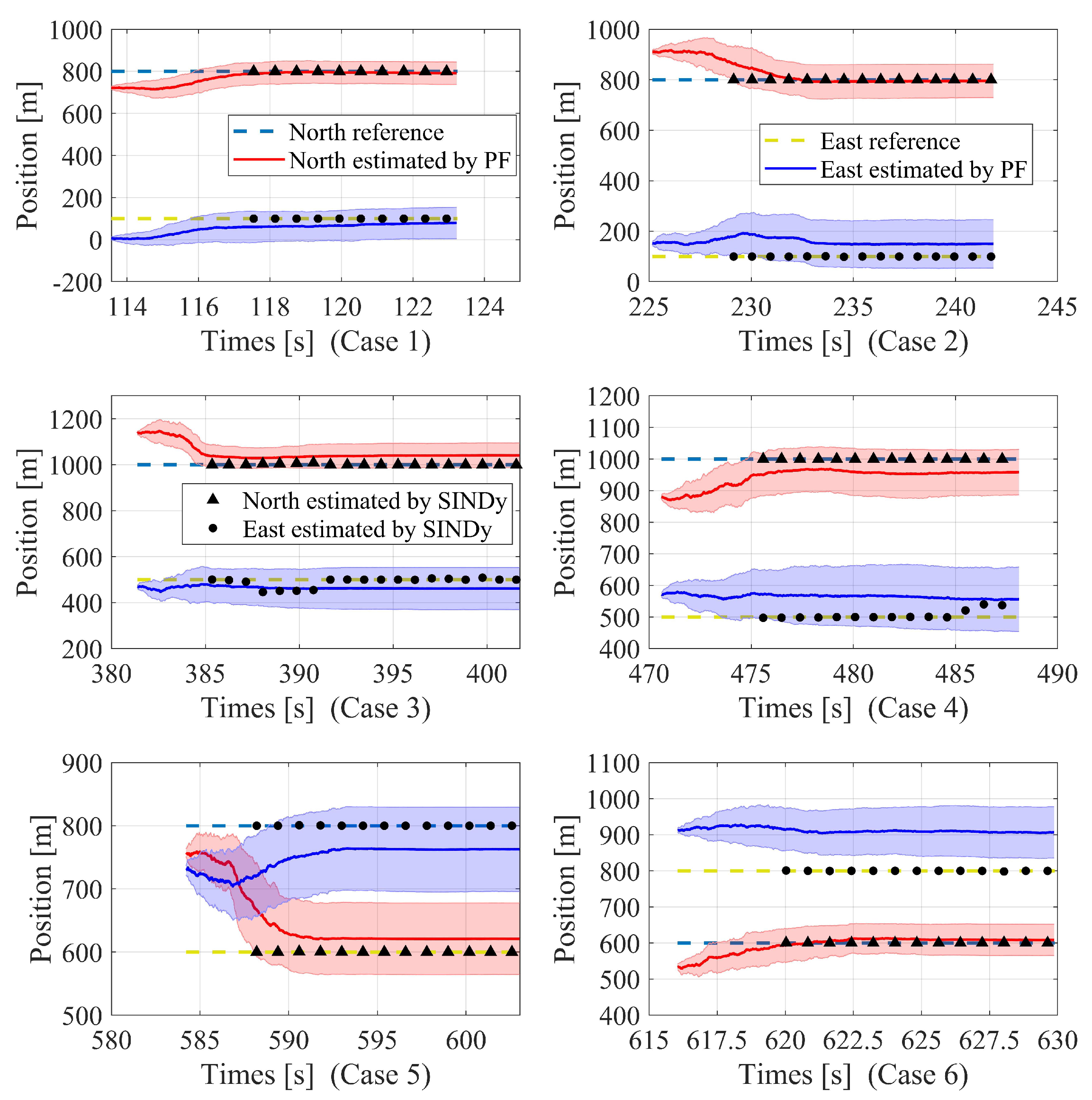
| Case | MAE (North) | Std (North) | MAE (East) | Std (East) |
|---|---|---|---|---|
| Case 1 | 2.6 | 2.3 | 3.7 | 2.8 |
| Case 2 | 3.9 | 3.1 | 5.4 | 4.3 |
| Case 3 | 6.3 | 4.1 | 13.9 | 19.7 |
| Case 4 | 2.7 | 3.5 | 15.7 | 16.2 |
| Case 5 | 2.4 | 2.2 | 1.9 | 2.1 |
| Case 6 | 0.9 | 1.8 | 0.8 | 2.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Liu, C.; Hong, H.; Huang, Y.; Ji, T.; Xie, F. An Online Data-Driven Method for Accurate Detection of Thermal Updrafts Using SINDy. Aerospace 2024, 11, 858. https://doi.org/10.3390/aerospace11100858
Lu Y, Liu C, Hong H, Huang Y, Ji T, Xie F. An Online Data-Driven Method for Accurate Detection of Thermal Updrafts Using SINDy. Aerospace. 2024; 11(10):858. https://doi.org/10.3390/aerospace11100858
Chicago/Turabian StyleLu, Yufeng, Chenglou Liu, Haichao Hong, Yunwei Huang, Tingwei Ji, and Fangfang Xie. 2024. "An Online Data-Driven Method for Accurate Detection of Thermal Updrafts Using SINDy" Aerospace 11, no. 10: 858. https://doi.org/10.3390/aerospace11100858
APA StyleLu, Y., Liu, C., Hong, H., Huang, Y., Ji, T., & Xie, F. (2024). An Online Data-Driven Method for Accurate Detection of Thermal Updrafts Using SINDy. Aerospace, 11(10), 858. https://doi.org/10.3390/aerospace11100858