

The 3Cat-4 Spacecraft Thermal Analysis and Thermal Vacuum Test Campaign Results

 , , , , , and
, , , , , and
Abstract
1. Introduction
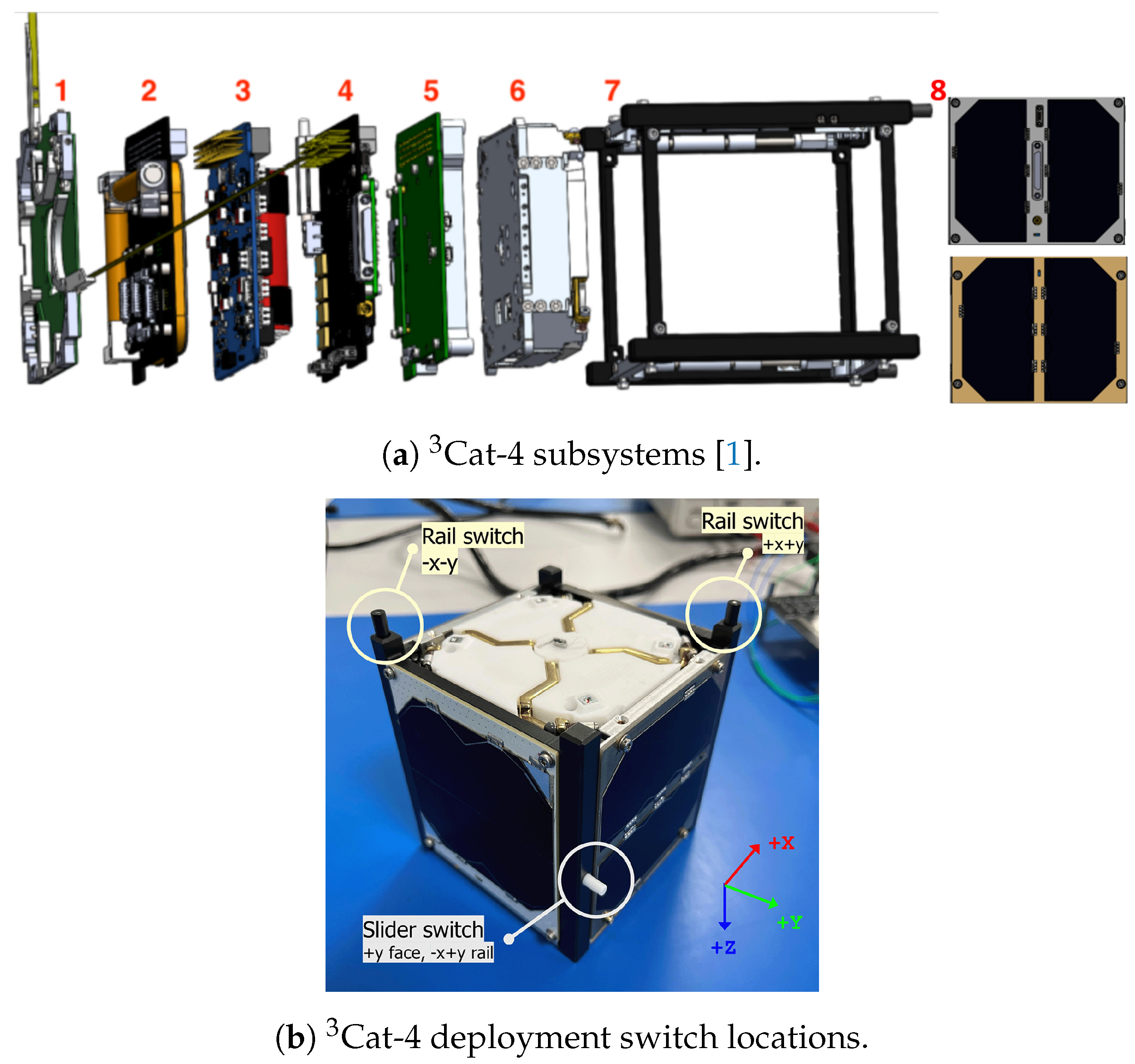
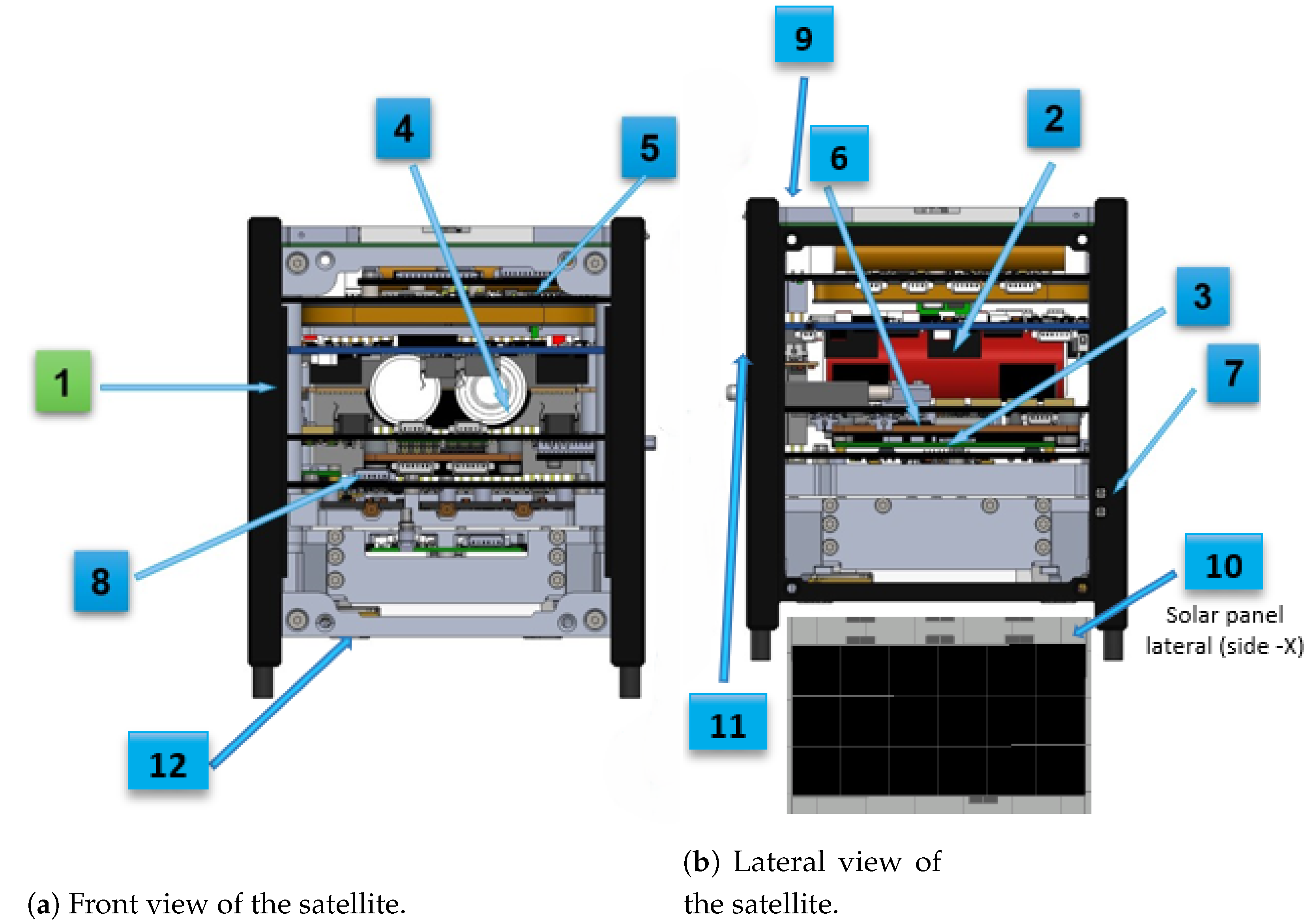
1.1. Definition and Structure of 3Cat-4
- Zenith Antenna Deployment System (ZADS): The ZADS is a COTS component from ISISPACE equipped with a UHF and a VHF deployable antennas. Located on the top face, the VHF antenna is used for the AIS payload. The UHF antenna is used for communications with the ground station [5].
- Communications and Attitude Determination and Control System (COMMS & ADCS board): The COMMS subsystem has been fully designed and manufactured by students from the NanoSat Lab [6]. It provides direct uplink and downlink communications between the CubeSat and the Earth Ground Station. On the other hand, the ADCS provides the required pointing for the payloads and antennas of the satellite during critical spacecraft operations [7], which are crucial for mission success. To perform these functions, three different type of sensors are integrated: magnetometers, photodiodes (located in the SPs), and gyroscopes.
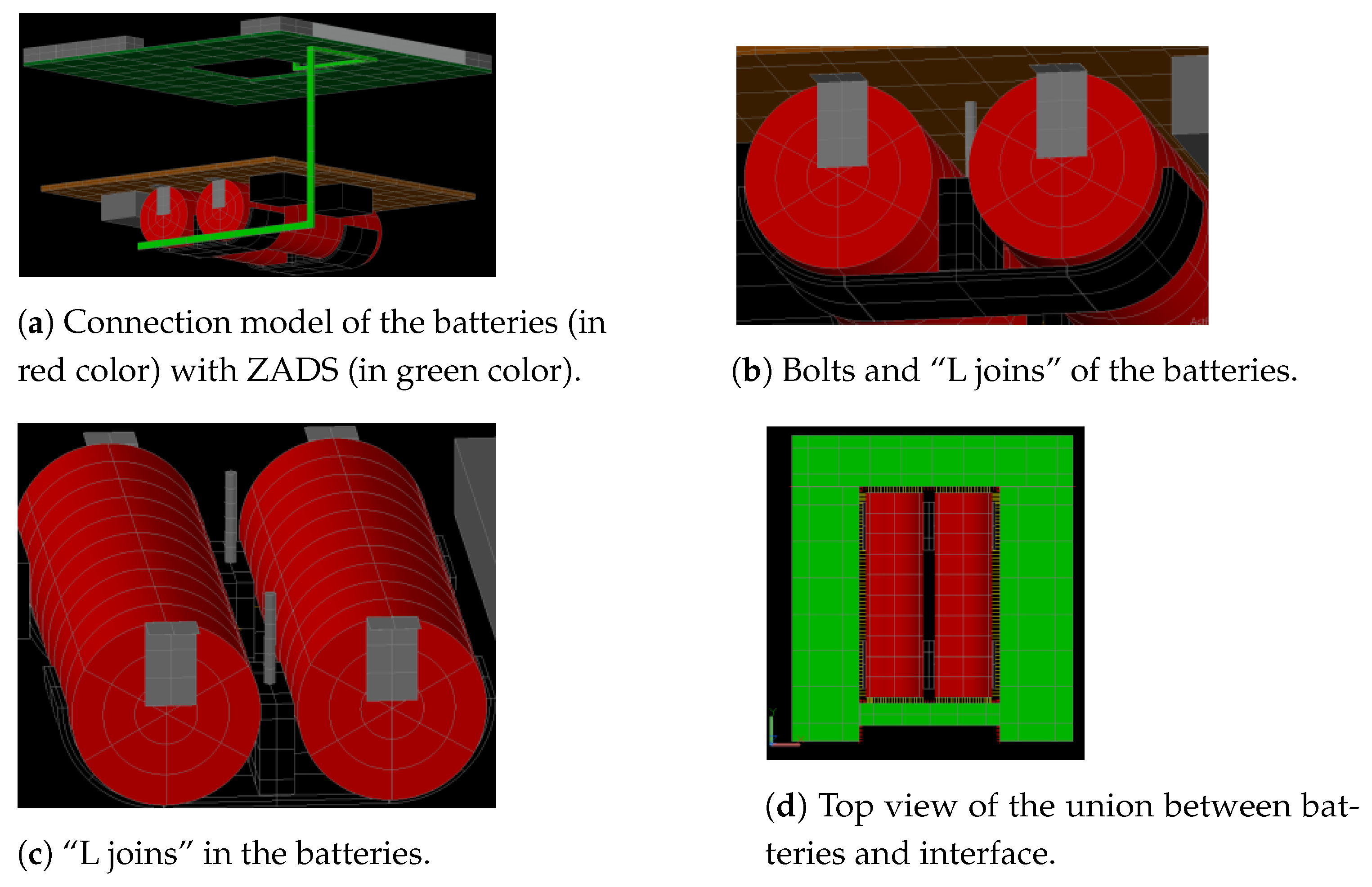
- Electrical and Power Subsystem (EPS): The EPS is responsible for supplying power to the satellite, and to obtain the energy from the solar cells. It consists of two batteries that store enough energy to operate the spacecraft during the eclipse periods. The batteries are charged when the satellite receives sunlight through solar panels mounted on the sides of the CubeSat.
- On-Board Computer (OBC): The OBC provides the processing capability, and it is connected to all subsystems, including the EPS to switch on/off the power supply of each subsystem, as needed.
- Flexible Microwave Payload 1 (FMPL-1): The FMPL-1 is the payload, and it has been designed and manufactured by UPC NanoSat Lab students [8]. It combines three experiments in a single board using an RTL-based Software Defined Radio (SDR) module, providing flexibility to adapt software algorithms, and receive signals in different frequency bands. These include an AIS receiver, an L-band radiometer, and a GNSS-R. The FMPL-1 provides the scientific value of the mission.
- Solar Panels (SPs): Composed of six faces: upper Solar Panels (SP +Z) and lateral Solar Panels (SPs ±X and ±Y).
1.2. Power Consumption and Modes
- Nadir Pointing (NP): Satellite -Z face pointing towards the center of the Earth. Desired (ideal) attitude of the spacecraft achieved by the ADCS during its operation.
- Random Rotation (RR): Satellite randomly rotating around its three axes (e.g., the tumbling immediate after the deployment).
- Standby (Sb): Period before the satellite is turned on. All subsystems are inactive.
- Released (R): After the standby period, the satellite is turned on, with the EPS and OBC as the only active subsystems.
- Pre-detumbling (PD): Once the UHF/AIS antennas have been deployed, the EPS, OBC, COMMS and AOCS (only determination for telemetry) are active. The COMMS subsystem is transmitting data with a ratio of 5% of the orbit time.
- Detumbling (D): Same as pre-detumbling state, with the magnetorquers operating.
- Detumbled (Dd): Once the satellite is detumbled, the AOCS is keeping the desired attitude and waiting for the NADS deployment command. The COMMS subsystem is transmitting data with a ratio of 5% of the orbit time.
- Nominal (N): Satellite is fully operative. The payload is executed 2 times per orbit. The COMMS subsystem is transmitting data with a ratio of 10% of the orbit time.
- Sun Safe (SS): If battery levels become critical, the satellite enters in this mode. From the power budget point of view, this mode is identically to the detumbled mode.
- Survival (S): After an unexpected anomaly, the satellite enters in this mode. The payload is disabled, the AOCS is keeping the desired attitude and COMMS is transmitting data with a ratio of 10% of the orbit time.
- Satellite Off (OFF): Satellite turned off during its operation due to unexpected events. All subsystems are inactive.
2. Analysis Assumptions
3. Scenarios and Modelling
3.1. Hot and Cold Worst Scenarios
3.1.1. External Heating Environment
3.1.2. Orbit Configuration
- Temperature convergence criteria: this parameter is vital to ensure that the simulation accurately reflects how temperature stabilizes in different components of the spacecraft.
- Maximum extrapolation of time stop: Controlling time extrapolation is important to ensure that the simulation remains within realistic limits. Too broad a time extrapolation could lead to unrealistic or irrelevant results, while too narrow could miss out on important details about the system’s long-term behavior.
- System energy balance criteria: This parameter ensures that energy within the system (spacecraft) is maintained in a state of equilibrium. It is crucial for simulating how the spacecraft manages its energy under different conditions.
- Max diffusion temperature change: Refers to the maximum variation in temperature across the satellite’s components. Controlling this parameter is crucial for understanding how heat is distributed throughout the spacecraft, ensuring that temperature-sensitive systems remain within safe operating limits, and allowing for proper thermal protection planning.
3.1.3. Satellite Internal Heat Dissipation and Attitude
3.2. Thermal Desktop Model and Setup
3.2.1. Material Properties and Contacts
- Al-Al junction point: The conductivity of this type of junction varies depending on factors such as the applied contact pressure, surface roughness, and others. Several experiments have been conducted to accurately determine this value [19]. To calculate the conductance between the spacers and the PCB, it is necessary to calculate the contact pressure between the components. The threaded rod and spacer materials are stainless steel and aluminum, respectively. The torsion of the junction between them ranges from 0.96 Nm to a maximum of 1.28 Nm. From this, it is possible to obtain the axial force using the Equation (1) [23]:The parameters in Equation (1) refer to distances based on the dimensions of the spacer (P, , ), where represents the axial force of the bolt, P denotes the thread pitch, is the mean diameter, and is the mean radius of the contact area beneath the head. Regarding with the friction coefficients (, ), signifies the coefficient of friction within the threads, and stands for the coefficient of friction between the bolt head and the component’s surface [23].
- The apparent pressure at the contact between the PCBs and the spacers can be obtained using the axial force and the contact area (Equation (2)):The contact area is the area of the spacer, and it is calculated to be 24.07 mm2. The resulting pressures at the contact range between 34.2 MPa and 45.62 MPa.
- The elevated pressure near the bolt, which diminishes with increasing distance from the bolt, explains the apparent discrepancy. Furthermore, the pressure calculation is confined to the spacer’s area, which is relatively small. Therefore, the thermal conductance in this contact is assumed to be at its maximum, estimated to be 105 W/(m2K).
- Bolted junction: In the case of this junction, expressions from [24] have been used. As indicated in the document, the temperature difference at the interface of both surfaces is uniformly distributed in the conducted tests, and the value of the thermal contact conductance represents an average value. The estimation of the thermal contact conductance is done using the Equations (3) and (4), depending on the number of turns, for this study is defined by the letter (N):and
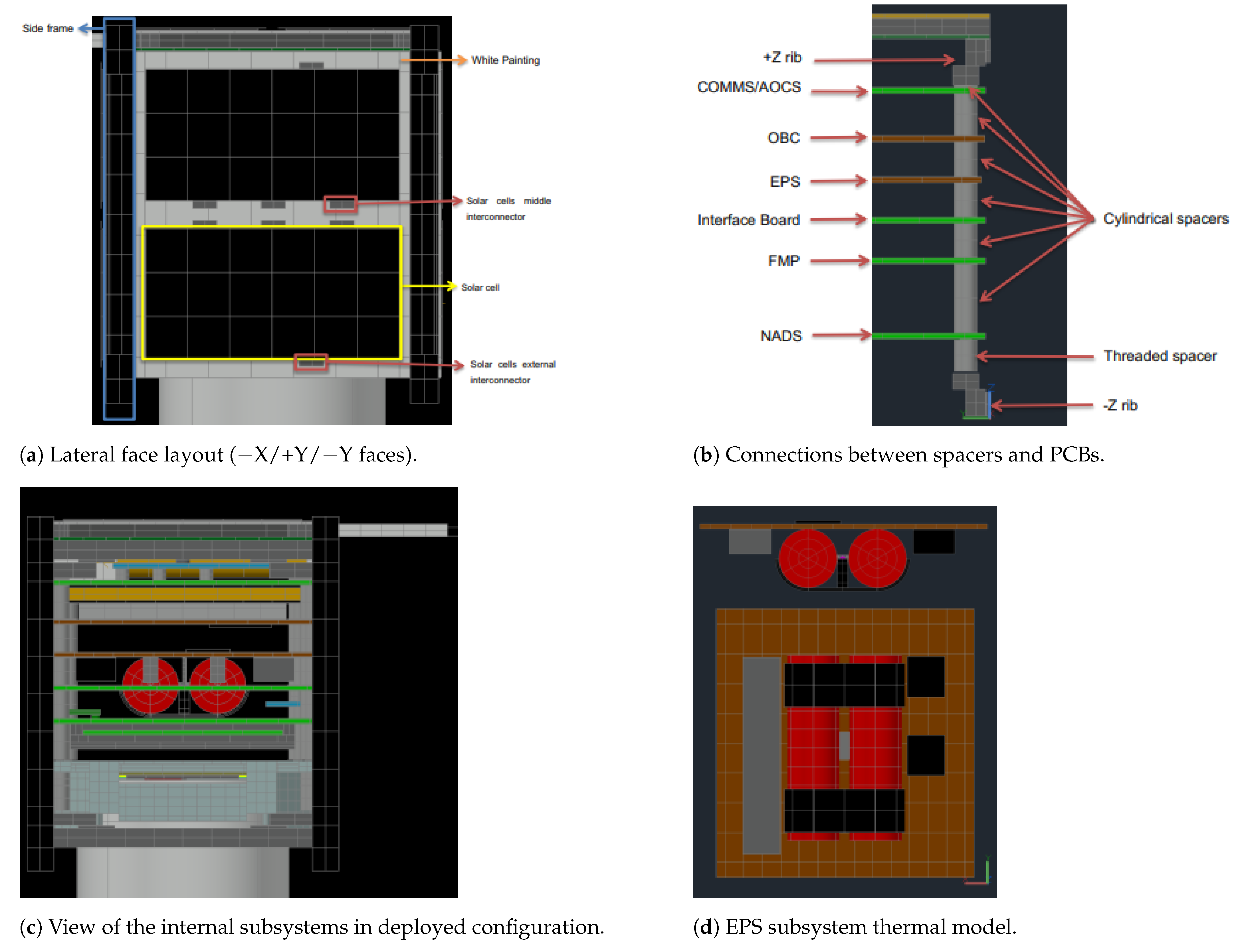
3.2.2. CAD Model
- Addition and modification of S/C components
- NADS Power board
- Material of Spacers: Stainless Steel A2-70
- Refinement of the materials list, including the thermal and optical properties of the materials used in the added components (Table A1).
3.2.3. Passive Thermal Control (Battery Heaters Inactive)
3.2.4. Comparison of Isothermal and Detailed Models
4. Simulation Results
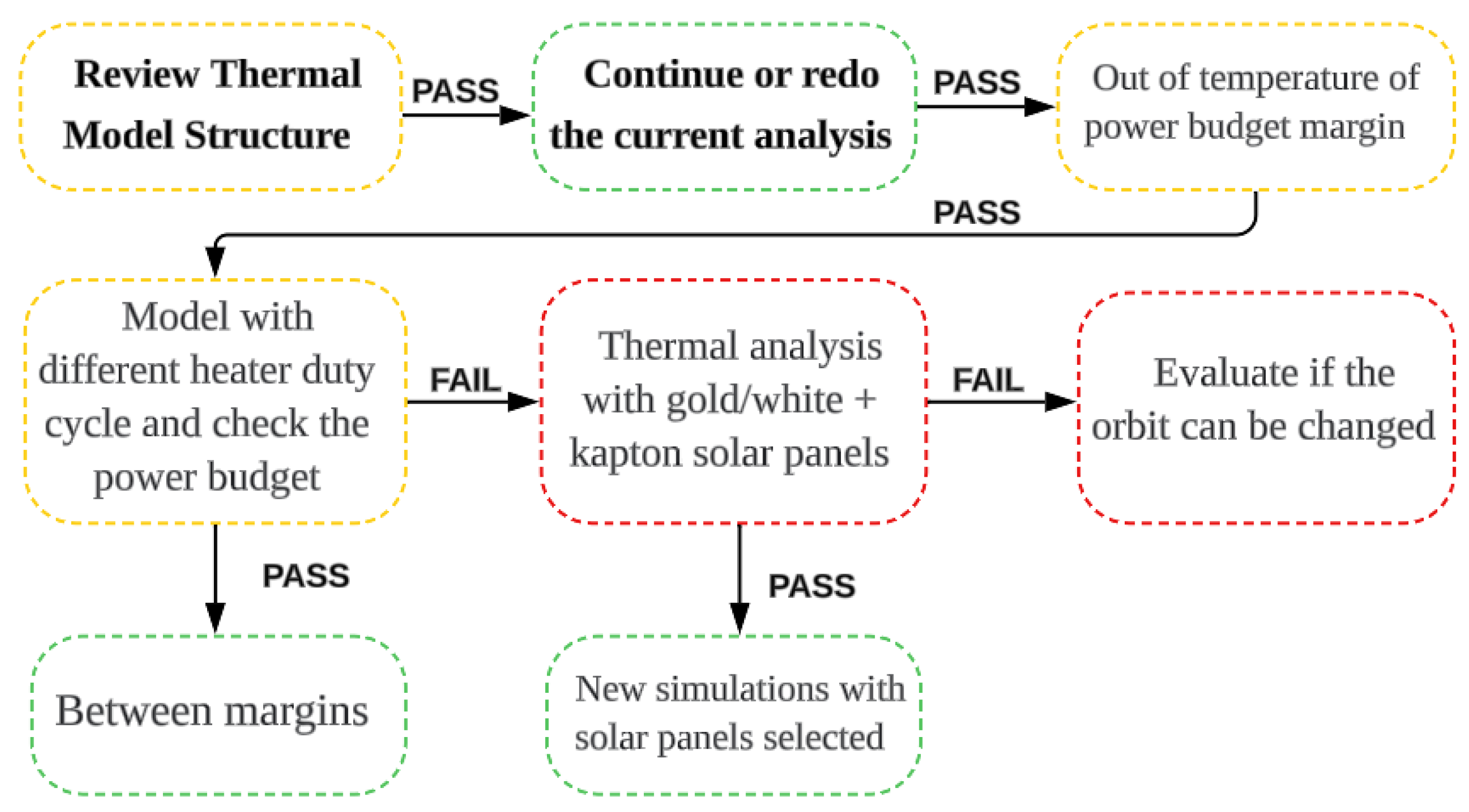
4.1. Heater Duty Cycle Analysis Results
4.2. Analysis of Solar Panel Colors and Surface Finishes
- Reduce modeling uncertainty: Since the batteries are actively controlled, the modeling uncertainty can be decreased to, e.g., 5 °C, taking into account possible temperature sensor measurement uncertainty. By doing so, the results will be acceptable. Additionally, it should be noted that the heater duty cycle is below 30%, allowing for a more intensive use of the heater if necessary.
- Apply the maximum heater power: Alternatively, the heater can be treated as any other unit by applying maximum heater power and incorporating a 10 °C uncertainty.
4.3. Final Simulation Results
- Upper solar panel: Gold area averaged optical with = 0.676 (Solar), and = 0.570 (IR).
- Lateral solar panels: Gold area averaged optical with Solar = 0.705 (Solar) and = 0.616 (IR).
- Inner surfaces: Black paint with = 0.960 (Solar) and = 0.870 (IR).
5. Thermal Vacuum Test Campaign
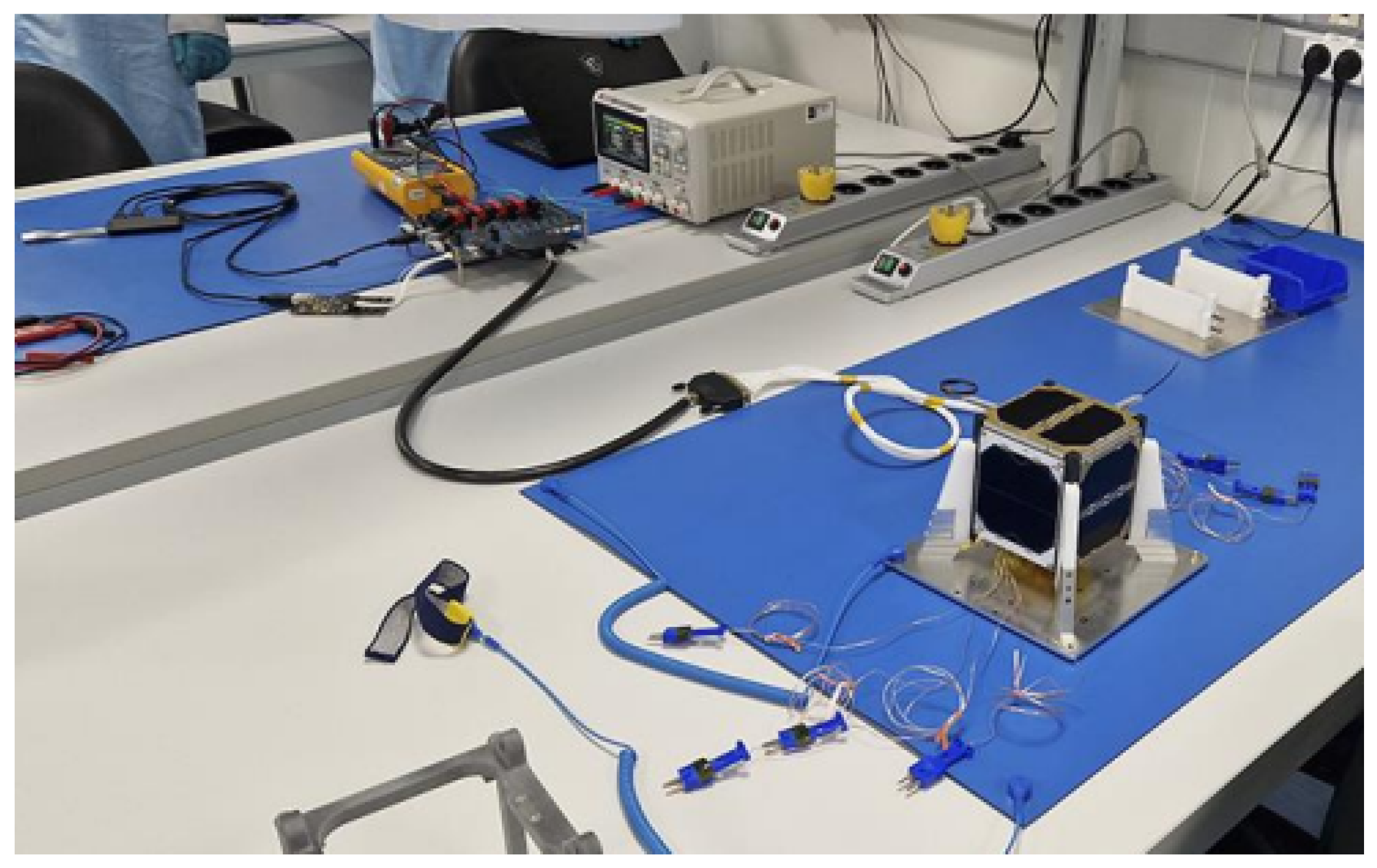
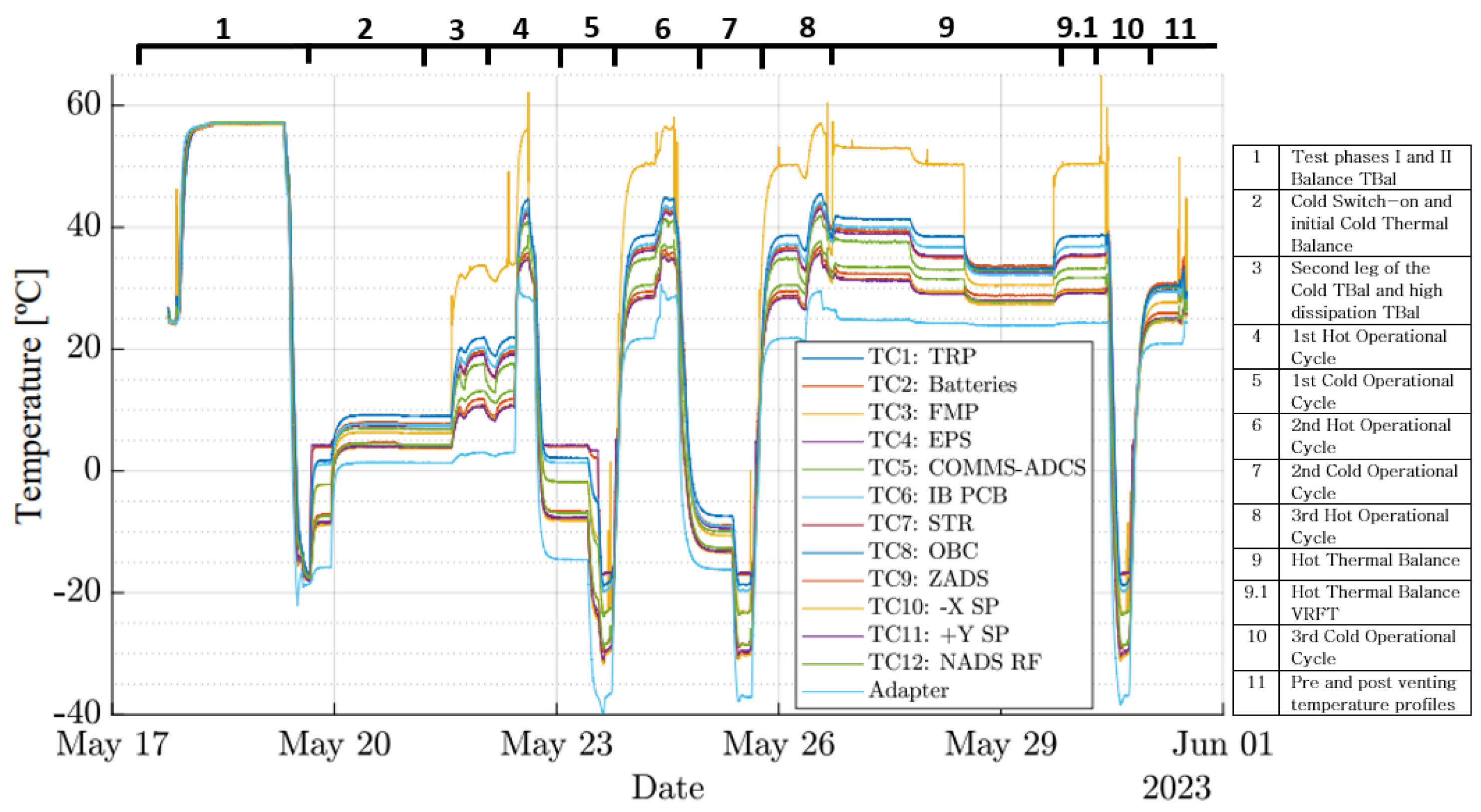
5.1. Test Overview
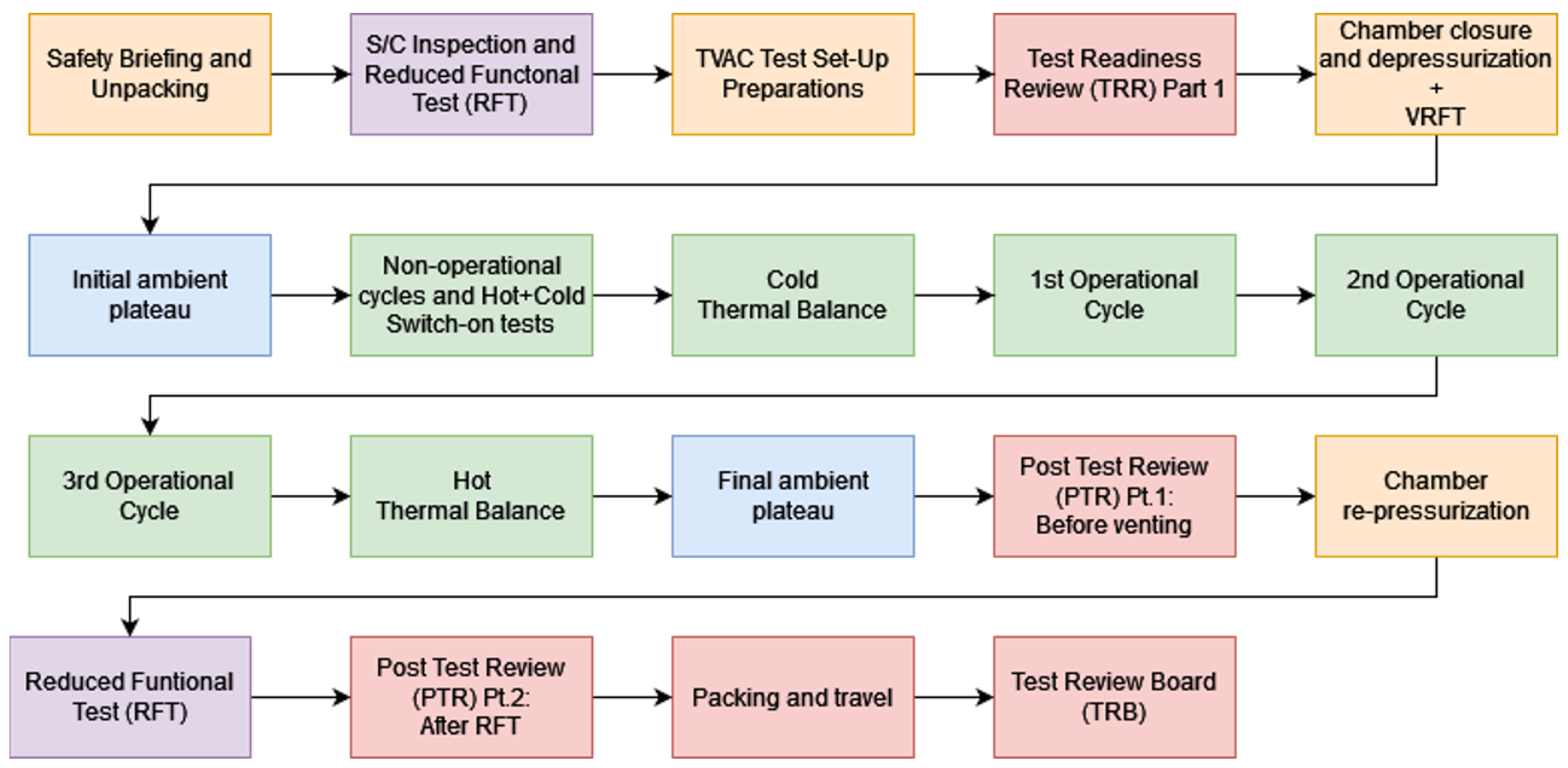
5.2. TVAC Test Campaign Flowgraph
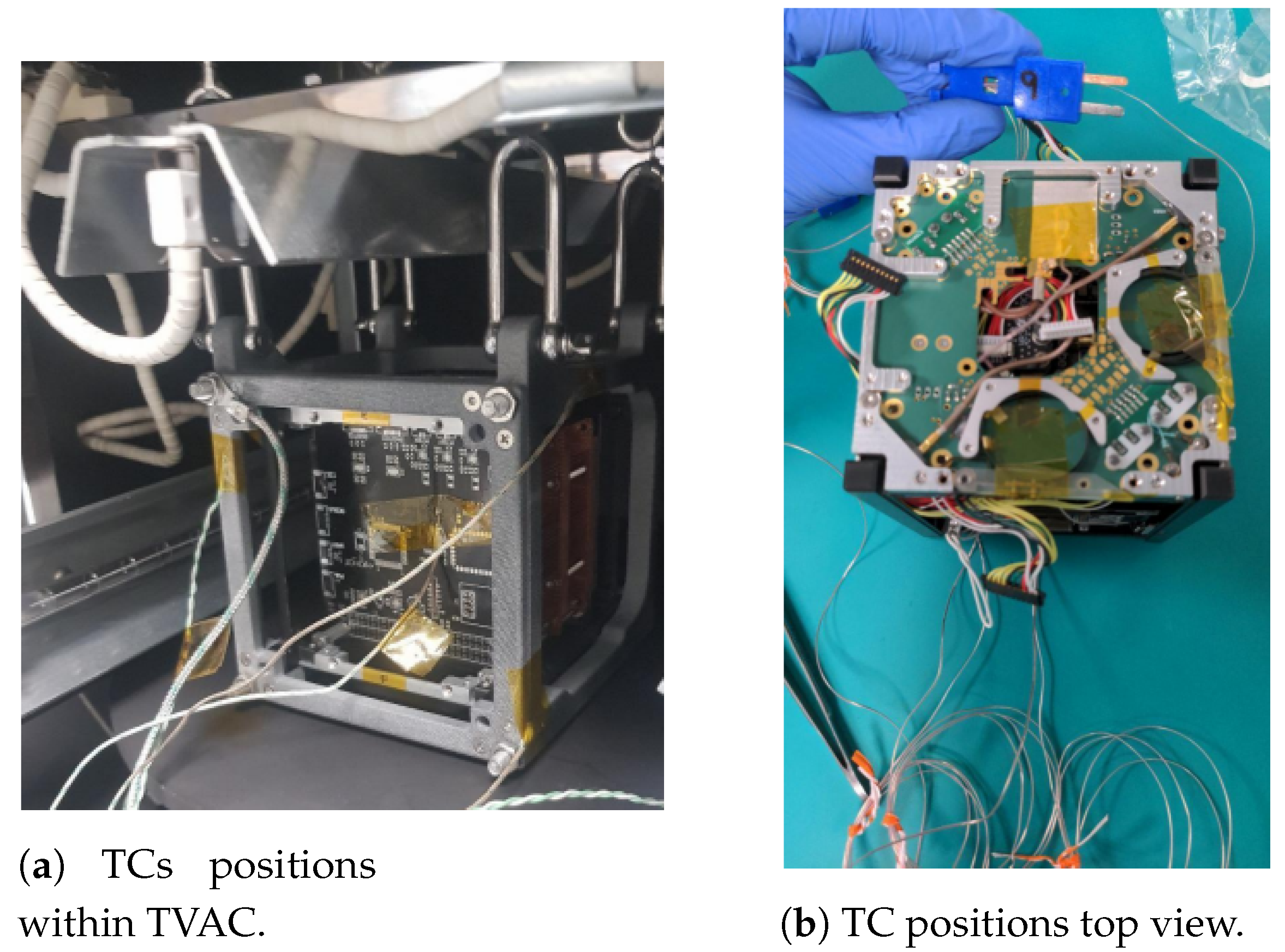
5.3. DUT Thermocouple (TC) Placement
- TC-1 (TRP): Positioned on the satellite’s structure.
- TC-2/4: Positioned in the EPS (at the batteries and the −X side).
- TC-3: Positioned in the FMP (Overo, side −X).
- TC-5: Positioned in COMMS-ADCS, close to the COMMS-MCU (side −Y).
- TC-6: Positioned in the Interface Board (side −X).
- TC-7: Positioned on the satellite’s structure. In case TC-1 fails, this one will control the temperature (TRP).
- TC-8: Positioned in the OBC Shield (side +Y).
- TC-9: Positioned in the ZADS (side +Z).
- TC-10: Positioned in the -X Solar Panel.
- TC-11: Positioned in the -Y Solar Panel.
- TC-12: Positioned in the NADS RF board.
5.4. Test Levels and Test Parameters
5.4.1. Bake-Out
5.4.2. Test Levels and Conditions
- The predicted temperatures are within the subsystem operational margins.
- The maximum temperature value selected for the operational subsystem will be determined with the operational temperature of the batteries in charge mode i.e., 45 °C.
- Table 16 is used to establish the minimum temperature value for the test.
- In this case, the minimum value is given by the Upper SP (+Z) antenna, which is −19 °C. This value is close to the expected measurement on the TRP (Structure), calculated as −17 °C. The temperature difference is small, so the actual gradient might need to be assessed during the thermal balance test.
- Although the battery has heaters that activate above 0 °C (hysteresis temperatures of 4 °C and 5 °C), it has been decided to not bring the battery temperature below 10 °C during its operation (though the minimum operational temperature, in discharge mode, is 20 °C).
5.5. Test Campaign Results
- Charge: 0 °C to 45 °C
- Discharge: −20 °C to 60 °C
5.5.1. Test Execution
- Configuration 1—Full Hot Configuration: S/C in Nominal Mode and FMP on, which includes the Magnetorquers actuating and the Deploys PoL cycling on and off to retrieve the housekeeping data.
- Configuration 2—Full Hot Configuration: Hot Configuration with No Magnetorquers: Phase started after a transit to survival, which puts the ADCS in idle. FMP is on and Deploys PoL is cycling.
- Configuration 3—Temperate Configuration with ADCS fully on and FMP off: This is the configuration expected for most of the time during orbital operations, with the FMP off and the ADCS maintaining Nadir Pointing.
- Configuration 4—Hot Configuration without ADCS: The difference with the second TBal phase is that the S/C is put in Ground Mode and not in Survival. This causes the Deploys PoL to be always on, instead of cycling, although its consumption is very low, at only 10 mA.
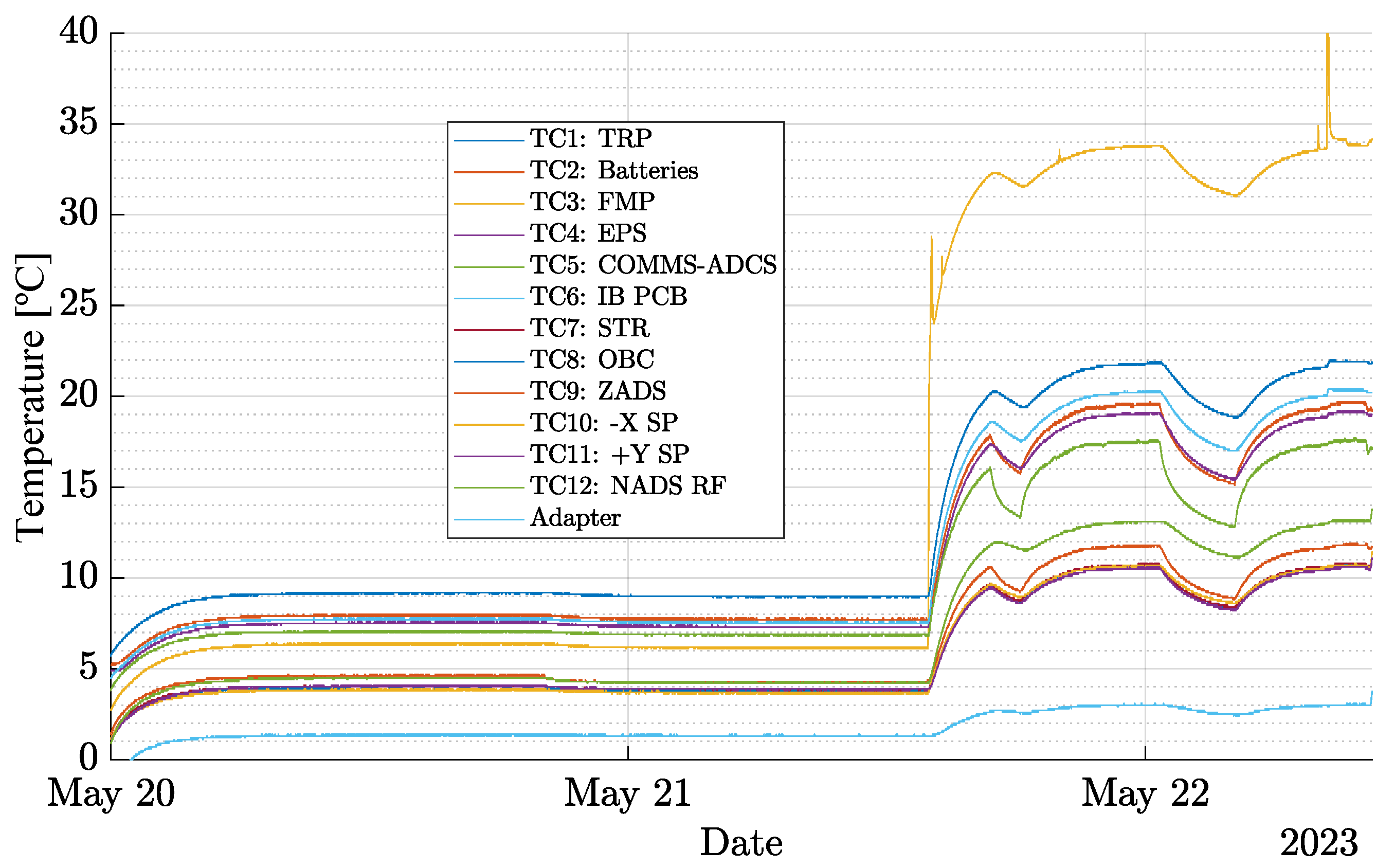
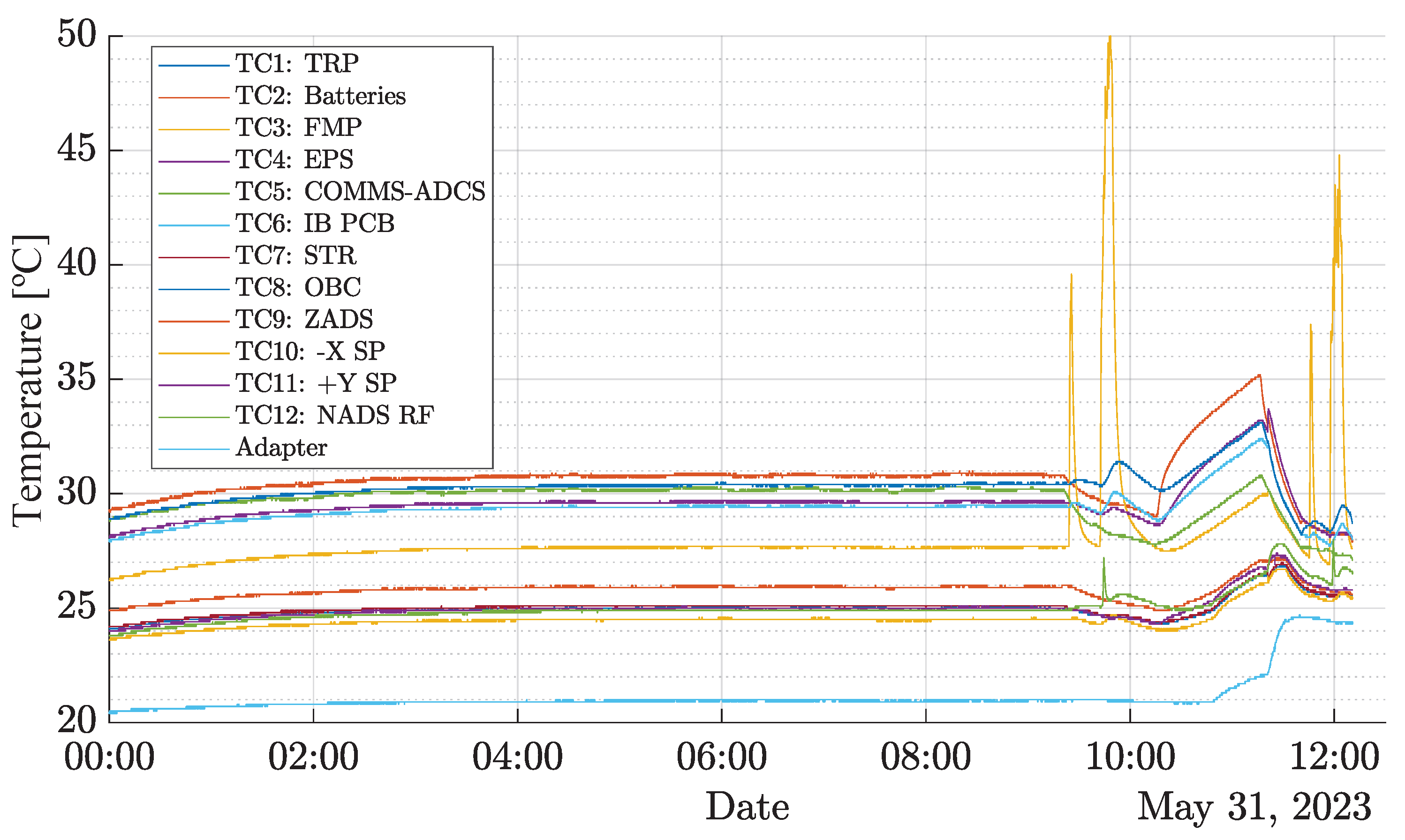
5.5.2. Temperatures at the TVAC Test Thermocouple Placements
Max-Min Cases
5.5.3. Post Test Review (PTR), Chamber Re-Pressurization and Post Test Reduced Functional Test (RFT)
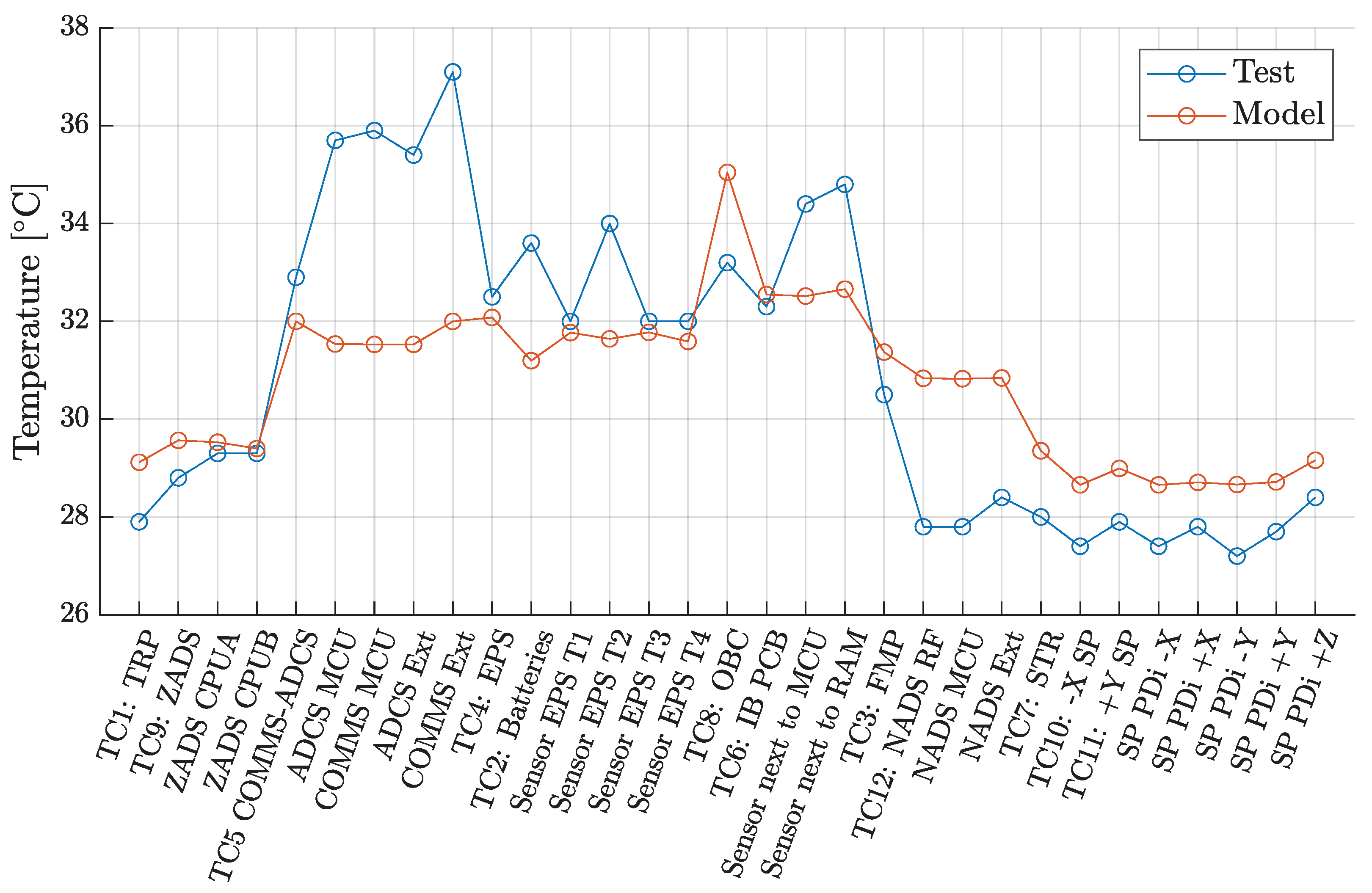
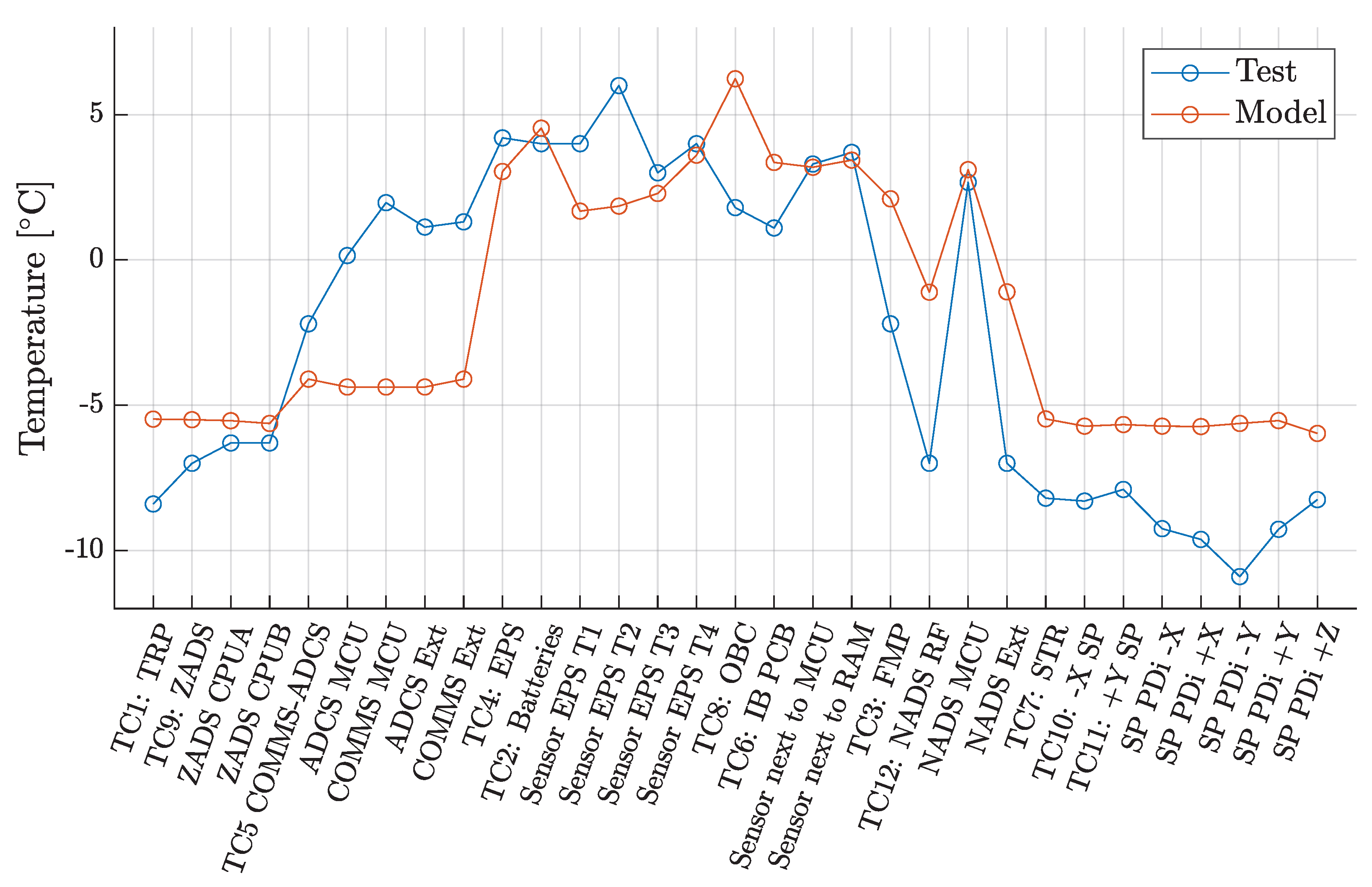
5.6. Correlation of the Thermal Model with Test Campaign Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADCS | Attitude Determination Control |
| AIS | Automatic Identification System |
| CSF | CubeSat Support Facilities |
| COTS | Commercial Off-The-Shelf |
| Dd | Detumbling |
| DUT | Device Under Test |
| EGSE | Electrical Ground Support Equipment |
| ESA | European Space Agency |
| ECSS | European Cooperation for Space Standardization |
| ESEC | European Space Security and Education Centre |
| FYS | Fly Your Satellite |
| GSE | Ground Support Equipment |
| MEGSE | Mehcanical |
| NMEA | National Marine Electronics Association |
| PTR | Post Test Review |
| RFI | Radio-Frequency Interference |
| RFT | Reduced Functional Test |
| SDR | Software Defines Radio |
| S/C | Spacecraft |
| SSO | Sun-Synchronous Orbit |
| SS | Sun Safe |
| TC | Thermocouple |
| TCS | Thermal Control Subsystem |
| TRP | Temperature Reference Point |
| TVAC | Thermal Vacuum Test Campaign |
| UVF | Ultra high Frequency |
| VHF | Very High Frequency |
| VRFT | Very Reduced Functional Test |
Appendix A
Appendix A.1

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subsystem | Part | Units | Mass (g) | Material | |
|---|---|---|---|---|---|
| Measured/ Provider | Estimation method/ Source | ||||
| STRUCTURE | Side_Frames | 2 | 109.4 | MatWeb Aluminium 6082 | Alumini 6082 |
| Ribs | 4 | 92.6 | MatWeb Aluminium 6082 | Alumini 6082 | |
| Deployment_Switch- Brackets | 4 | 0.46 | MatWeb Aluminium 6082 | Alumini 6082 | |
| Deployment_Switch- Killswitch_Body | 2 | 0.3 | SolidWorks Electronics | Electron compon | |
| Screw | 8 | 0.08 | MatWeb Stainless steel A2-70 | Steel A2 | |
| Spacer | 4 | 0.52 | SolidWorks Aluminium 1060 alloy | Alumini ASTM B | |
| Rod | 4 | 4.4 | MatWeb Stainless steel AISI 304 | Stainles AISI 30 | |
| Switch_PIN-Busje | 2 | 0.21 | SolidWorks Aluminium 7075-O | Alumini 7075 | |
| Switch_PIN-Pin | 2 | 0.77 | MatWeb Stainless Steel 430F | Stainles steel 43 | |
| Switch_PIN-Spring | 2 | 0.41 | SolidWorks Stainless Steel | Steel | |
| Nut | 4 | 0.07 | MatWeb Stainless steel A2-70 | Stainles Steal | |
| Screw | 8 | 0.29 | MatWeb Stainless steel A2-70 | Stainles Steal | |
| Spacers_Round | 28 | 0.052 | MatWeb Aluminium 1050A | Alumini 1050A H | |
| WHOLE SUBSYSTEM MASS (g): | 209.6 | ||||
| OBC | OBC-NanoMind_A712C | 1 | 55 | GOMSpace NanoMind_a 712C Data Sheet | |
| WHOLE SUBSYSTEM MASS (g): | 55.0 | ||||
| EPS | EPS-NanoPower_P31u-9 | 1 | 200 | GOMSpace NanoPower_P31u-9 Data Sheet | |
| WHOLE SUBSYSTEM MASS (g): | 200.0 | ||||
| INTERFACE | Mainboard PCB | 1 | 31.54 | Solidworks basic PCB | Basic PCB |
| Mainboard-Data_Bus | 2 | 2.78 | SolidWorks ABS | ABS | |
| Mainboard-Deployment_Switch | 1 | 1.93 | SolidWorks Nylon 101 | Nylon 1 | |
| Mainboard-Deployment_Switch_Pin_Steel | 1 | 1.69 | SolidWorks Annealed Stainless Steel | Stainles Steel | |
| Daughterboard-Umbilical_conector | 1 | 5.94 | Solidworks basic PCB | Electronic component | |
| Mainboard-Rbf | 1 | 0.55 | Solidworks basic PCB | Electronic component | |
| Mainboard-Abf | 1 | 1.08 | Solidworks basic PCB | Electronic component | |
| Daughterboard-PCB | 1 | 4.35 | Solidworks basic PCB | Electronic component | |
| Mainboard-Deployment_Switch_Pin_Teflon | 1 | 0.48 | SolidWorks politetrafluoroetileno (PTFE) | PFTE | |
| Mainboard_Switch_Core | 1 | 1.93 | SolidWorks Nylon 101 | Nylon | |
| Mainboard_Switch_Spring | 1 | 0.14 | SolidWorks Stainless Steel | Stainles Steel | |
| WHOLE SUBSYSTEM MASS (g): | 52.4 | ||||
| ZADS | ZADS-Pcb | 1 | 30.42 | Whole system measured mass- parts esteemed mass | |
| ZADS-Sensors | 6 | ||||
| ZADS-Resistances | 12 | ||||
| ZADS-VHF_Antenna | 1 | ||||
| ZADS-UHF_Antenna | 1 | ||||
| ZADS-Supports | 4 | 5 | MatWeb Aluminium 1050A | Generic aluminum | |
| ZADS-Box_Bracket | 2 | 3.42 | MatWeb Aluminium 1050A | Generic aluminum | |
| ZADS-Side_Cover | 2 | 3.2 | MatWeb Aluminium 1050A | Generic aluminum | |
| ZADS-External_part | 14 | 0.37 | MatWeb Stainles steel A2-70 | Stainles steel A2-70 | |
| ZADS-Spring | 2 | 0.02 | SolidWorks stainless steel | steel | |
| ZADS-Screw | 32 | 20.16 | MatWeb Stainles steel A2-70 | stainles steel A2-70 | |
| ZADS-Nut | 10 | 0.05 | MatWeb Stainles steel A2-70 | stainles steel A2-70 | |
| WHOLE SUBSYSTEM MASS (g): | 62.6 | ||||
| COMMS_AOCS | COMMS_AOCS-Pcb | 1 | 35.69 | SolidWorks Basic PCB | Basic PCB |
| COMMS_AOCS-Bus | 2 | 3.53 | SolidWorks ABS | ABS | |
| COMMS_AOCS-Torquerods | 9 | 99.84 | SolidWorks Nylon 101 SolidWorks Aluminium 6063-0 SolidWorks Copper | Nylon, aluminium 6063-0, copper, aluminium generic plastic | |
| COMMS_AOCS-Screw | 12 | 0.47 | SolidWorks Steel Alloy | Steel Alloy | |
| COMMS_AOCS-Spacer | 12 | 0.9 | Steel Alloy | Steel Alloy | |
| COMMS_AOCS-Daughterboard | 1 | 4.33 | SolidWorks Basic PCB | Basic PCB | |
| WHOLE SUBSYSTEM MASS (g): | 144.8 | ||||
| FMP | FMP-Mainboard-Pcb | 1 | 31.22 | SolidWorks basic PCB | Basic PCB |
| FMP-Daughterboard-Pcb | 1 | 17.8 | SolidWorks basic PCB | Basic PCB | |
| FMP-Shield | 1 | 49.99 | SolidWorks aluminium 7075 | Aluminium 7075 | |
| FMP-Screw | 6 | 0.3 | SolidWorks Stainless Steel | Stainle Steel | |
| WHOLE SUBSYSTEM MASS (g): | 99.3 | ||||
| NADS | NADS-Mainboard-Pcb | 1 | 34.31 | SolidWorks basic PCB | Basic PCB |
| NADS-Screws | 33 | 0.64 | SolidWorks Stainless steel 1.4000 (X6Cr13) | Stainless steel 1.4000 (X6Cr13) | |
| NADS-Nut | 12 | 0.14 | SolidWorks Stainless steel 1.4000 (X6Cr13) | Stainless steel 1.4000 (X6Cr13) | |
| NADS-Daughterboard-Pcb | 1 | 22.34 | SolidWorks basic PCB | Basic PCB | |
| Wire | 7 | 0.004 | SolidWorks Nylon 101 | Nylon | |
| NADS-Deploy_Holder | 32 | 6.69 | SolidWorks Stainless steel | Stainles Steel | |
| NADS-HELIX-Ring | 2 | 0.44 | SolidWorks ABS | ABS | |
| NADS-HELIX-Sheath | 1 | 28.83 | SolidWorks PTFE | PTFE | |
| NADS-HELIX-Antenna | 1 | 14.79 | SolidWorks Stainless steel | Stainles Steel | |
| NADS-HELIX-Retainer | 3 | 3.5 | SolidWorks ABS | ABS | |
| Gravity_Boom | 1 | 215.45 | SolidWorks PTFE | PTFE | |
| NADS-HELIX-Boom_Holder | 1 | 1.58 | SolidWorks PTFE | PTFE | |
| Shield_Plane | 1 | 1.99 | SolidWorks 2024 alloy (SN) | Al2024- kapton | |
| NADS-Shield_Plane- PCB | 1 | 2.16 | SolidWorks Basic PCB | Basic PCB | |
| WHOLE SUBSYSTEM MASS (g): | 332.9 | ||||
| SOLAR PANELS | SP_Side | 5 | 85.51 | SolidWorks Basic PCB | Basic PCB |
| WHOLE SUBSYSTEM MASS (g): | 85.5 | ||||
| HARNESSING | 3CAT-4-SP-Side_A-X | 1 | 11.76 | Indicative wire lengths with measured density of wire. | Cooper, plastic |
| 3CAT4 | WHOLE SATELLITE MASS (g): | 1242.1 | |||
Appendix A.2
| Case | Specific Case/ Heater Hysteresis Temp. (°C) | Mode | Spin (°/s) | Batteries Calculated Temp (°C) | Batteries Predicted Temp (°C) | Duty cycle (%) | ||
|---|---|---|---|---|---|---|---|---|
| Min | Max | Min | Max | |||||
| Worst Cold | Worst Cold Case | Detumbling | 0 All Axis | −16.08 | 21.36 | −26.08 | 31.36 | 0% |
| Cold Case | Cold Case | Detumbling | 0 All Axis | −10.25 | 22.74 | −20.25 | 32.74 | 0% |
| Cold Case | 3 to 4 | Detumbling | 0 All Axis | 2.53 | 10.62 | −7.47 | 20.62 | 18% |
| Cold Case | 4 to 5 | Detumbling | 0 All Axis | 3.29 | 22.37 | −6.71 | 32.37 | 18% |
| Cold Case | 5 to 6 | Detumbling | 0 All Axis | 4.39 | 13.21 | −5.61 | 23.21 | 25% |
| Worst Cold | Worst Cold Case | Detumbling | 1.5 Z Axis | −9.59 | 22.43 | −19.59 | 32.43 | 0% |
| Cold Case | Cold Case | Detumbling | 1.5 Z Axis | −4.19 | 24.63 | −14.19 | 34.63 | 0% |
| Cold Case | 4 to 5 | Detumbling | 1.5 Z Axis | 3.84 | 24.61 | −6.16 | 34.61 | 18% |
| Worst Cold | Worst Cold Case | Detumbling | 3.5 Z Axis | −8.82 | 22.65 | −18.82 | 32.65 | 0% |
| Cold Case | Cold Case | Detumbling | 3.5 Z Axis | −4.19 | 24.63 | −14.19 | 34.63 | 0% |
| Worst Cold | Worst Cold Case | Sun safe | 0 All Axis | −15.56 | 21.45 | −25.56 | 31.45 | 0% |
| Cold Case | Cold Case | Sun safe | 0 All Axis | −9.71 | 22.92 | −19.71 | 32.92 | 0% |
| Cold Case | 2 to 3 | Sun safe | 0 All Axis | 1.63 | 22.91 | −8.37 | 32.91 | 16% |
| Cold Case | 3 to 4 | Sun safe | 0 All Axis | 2.56 | 22.91 | −7.44 | 32.91 | 17% |
| Worst Cold | Worst Cold Case | Sun safe | 2.5 Z Axis | −8.59 | 22.82 | −18.59 | 32.82 | 0% |
| Cold Case | Cold Case | Sun safe | 2.5 Z Axis | −3.25 | 25.12 | −13.25 | 35.12 | 0% |
| Worst Cold | Worst Cold Case | Sun safe | 6 Z Axis | −8.23 | 22.74 | −18.23 | 32.74 | 0% |
| Cold Case | Cold Case | Sun safe | 6 Z Axis | −2.87 | 25.02 | −12.87 | 35.02 | 0% |
| Worst Cold | Worst Cold Case | Nominal Mode | 0 All Axis | −14.53 | 21.55 | −24.53 | 31.55 | 0% |
| Cold Case | Cold Case | Nominal Mode | 0 All Axis | −8.62 | 23.14 | −18.62 | 33.14 | 0% |
| Worst Cold | Worst Cold Case | Nominal Mode | 2.5 Z Axis | −7.62 | 23.10 | −17.62 | 33.10 | 0% |
| Cold Case | Cold Case | Nominal Mode | 2.5 Z Axis | −2.28 | 25.43 | −12.28 | 35.43 | 0% |
| Worst Cold | Worst Cold Case | Nominal Mode | 6 Z Axis | −7.18 | 23.02 | −17.18 | 33.02 | 0% |
| Cold Case | Cold Case | Nominal Mode | 6 Z Axis | −1.98 | 25.30 | −11.98 | 35.30 | 0% |
| Worst Cold | Worst Cold Case | Released | 10 All Axis | −16.62 | −1.51 | −26.62 | 8.49 | 0% |
| Cold Case | Cold Case | Released | 10 All Axis | −7.86 | 8.42 | −17.86 | 18.42 | 0% |
| Worst Cold | Worst Cold Case | Released | 30 All Axis | −17.08 | −2.14 | −27.08 | 7.86 | 0% |
| Cold Case | Cold Case | Released | 30 All Axis | −10.32 | 5.79 | −20.32 | 15.79 | 0% |
| Worst Cold | Worst Cold Case | Released | 60 All Axis | −16.74 | −1.73 | −26.74 | 8.27 | 0% |
| Cold Case | Cold Case | Released | 60 All Axis | −9.90 | 6.14 | −19.90 | 16.14 | 0% |
| Worst Cold | Worst Cold Case | Pre- detumbling | 10 All Axis | −14.54 | 0.49 | −24.54 | 10.49 | 0% |
| Cold Case | Cold Case | Pre- detumbling | 10 All Axis | −8.36 | 7.74 | −18.36 | 17.74 | 0% |
| Worst Cold | Worst Cold Case | Pre- detumbling | 30 All Axis | −15.04 | −0.26 | −25.04 | 9.74 | 0% |
| Cold Case | Cold Case | Pre- detumbling | 30 All Axis | −8.36 | 7.74 | −18.36 | 17.74 | 0% |
| Worst Cold | Worst Cold Case | Pre- detumbling | 60 All Axis | −14.61 | 0.23 | −24.61 | 10.23 | 0% |
| Cold Case | Cold Case | Pre- detumbling | 60 All Axis | −7.95 | 8.07 | −17.95 | 18.07 | 0% |
| Worst Hot | Worst Hot Case | Released | 10 All Axis | 23.24 | 24.98 | 13.24 | 34.98 | 0% |
| Hot Case | Hot Case | Released | 10 All Axis | 22.30 | 23.67 | 12.30 | 33.67 | 0% |
| Worst Hot | Worst Hot Case | Released | 30 All Axis | 23.01 | 24.79 | 13.01 | 34.79 | 0% |
| Hot Case | Hot Case | Released | 30 All Axis | 21.96 | 23.38 | 11.96 | 33.38 | 0% |
| Worst Hot | Worst Hot Case | Released | 60 All Axis | 22.81 | 24.92 | 12.81 | 34.92 | 0% |
| Hot Case | Hot Case | Released | 60 All Axis | 21.84 | 23.58 | 11.84 | 33.58 | 0% |
| Worst Hot | Worst Hot Case | Pre- detumbling | 10 All Axis | 24.82 | 26.66 | 14.82 | 36.66 | 0% |
| Hot Case | Hot Case | Pre- detumbling | 10 All Axis | 23.78 | 25.25 | 13.78 | 35.25 | 0% |
| Worst Hot | Worst Hot Case | Pre- detumbling | 30 All Axis | 24.50 | 26.40 | 14.50 | 36.40 | 0% |
| Hot Case | Hot Case | Pre- detumbling | 30 All Axis | 23.51 | 25.04 | 13.51 | 35.04 | 0% |
| Worst Hot | Worst Hot Case | Pre- detumbling | 60 All Axis | 24.22 | 26.44 | 14.22 | 36.44 | 0% |
| Hot Case | Hot Case | Pre- detumbling | 60 All Axis | 23.24 | 25.08 | 13.,24 | 35.08 | 0% |
| Worst Hot | Worst Hot Case | Detumbling | 0 All Axis | 20.00 | 25.65 | 10.00 | 35.65 | 0% |
| Hot Case | Hot Case | Detumbling | 0 All Axis | 20.00 | 24.50 | 10.00 | 34.50 | 0% |
| Worst Hot | Worst Hot Case | Detumbling | 1.5 Z Axis | 20.00 | 32.96 | 10.00 | 42.96 | 0% |
| Hot Case | Hot Case | Detumbling | 1.5 Z Axis | 20.00 | 31.83 | 10.00 | 41.83 | 0% |
| Worst Hot | Worst Hot Case | Detumbling | 3.5 Z Axis | 20.00 | 32.75 | 10.00 | 42.75 | 0% |
| Hot Case | Hot Case | Detumbling | 3.5 Z Axis | 20.00 | 31.56 | 10.00 | 41.56 | 0% |
| Worst Hot | Worst Hot Case | Sun safe | 0 All Axis | 20.00 | 26.06 | 10.00 | 36.06 | 0% |
| Hot Case | Hot Case | Sun safe | 0 All Axis | 20.00 | 24.80 | 10.00 | 34.80 | 0% |
| Worst Hot | Worst Hot Case | Sun safe | 2.5 Z Axis | 20.00 | 32.99 | 10.00 | 42.99 | 0% |
| Hot Case | Hot Case | Sun safe | 2.5 Z Axis | 20.00 | 32.52 | 10.00 | 42.52 | 0% |
| Worst Hot | Worst Hot Case | Sun safe | 6 Z Axis | 20.00 | 32.57 | 10.00 | 42.57 | 0% |
| Hot Case | Hot Case | Sun safe | 6 Z Axis | 20.00 | 31.43 | 10.00 | 41.43 | 0% |
| Worst Hot | Worst Hot Case | Nominal Mode | 0 All Axis | 20.00 | 26.93 | 10.00 | 36.93 | 0% |
| Hot Case | Hot Case | Nominal Mode | 0 All Axis | 20.00 | 25.69 | 10.00 | 35.69 | 0% |
| Worst Hot | Worst Hot Case | Nominal Mode | 2.5 Z Axis | 20.00 | 33.75 | 10.00 | 43.75 | 0% |
| Hot Case | Hot Case | Nominal Mode | 2.5 Z Axis | 20.00 | 32.52 | 10.00 | 42.52 | 0% |
| Worst Hot | Worst Hot Case | Nominal Mode | 6 Z Axis | 20.00 | 33.33 | 10.00 | 43.33 | 0% |
| Hot Case | Hot Case | Nominal Mode | 6 Z Axis | 20.00 | 32.21 | 10.00 | 42.21 | 0% |
References
- UPC NanoSat Lab. 3Cat-4: The Fourth Satellite in the Lab’s CubeCat Series. Available online: https://nanosatlab.upc.edu/en/missions-and-projects/3cat-4 (accessed on 16 May 2023).
- CalPoly. Cubesat Design Specification (CDS) Rev. 14.1; CalPoly: San Luis Obispo, CA, USA, 2022; Number 00-34. [Google Scholar]
- California State Polytechnic University. CubeSat Design Specification Rev. 13; California State Polytechnic University: Pomona, CA, USA, 2013. [Google Scholar]
- Fernandez, L.; Sobrino, M.; Ruiz-de-Azua, J.A.; Calveras, A.; Camps, A. Design of a Deployable Helix Antenna at L-Band for a 1-Unit CubeSat: From Theoretical Analysis to Flight Model Results. Sensors 2022, 22, 3633. [Google Scholar] [CrossRef] [PubMed]
- Morea Font, A. On-Board Computer Software and FlatSat Testing for the 3Cat-4 CubeSat Mission. Bachelor’s Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2021. [Google Scholar]
- Munoz-Martin, J.F.; Miguelez, N.; Castella, R.; Fernandez, L.; Solanellas, A.; Via, P.; Camps, A. 3Cat-4: Combined GNSS-R, L-Band radiometer with RFI mitigation, and AIS receiver for a I-Unit Cubesat Based on Software Defined Radio. In Proceedings of the IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Kuiper, J.M. Attitude Determination and Control System (ADCS). Available online: https://www.tudelft.nl/lr/organisatie/afdelingen/space-engineering/space-systems-engineering/research/miniaturization/attitude-determination-and-control-system-adcs (accessed on 16 May 2023).
- Muñoz Martin, J.F. Development of Novel Instruments and Techniques for Passive Microwave Remote Sensing; Universitat Politècnica de Catalunya: Barcelona, Spain, 2021. [Google Scholar]
- Ruiz-de-Azua, J.A.; Muñoz, J.F.; Fernández, L.; Badia, M.; Llavería, D.; Diez, C.; Aguilella, A.; Pérez, A.; Milian, O.; Sobrino, M.; et al. 3Cat-4 Mission: A 1-Unit CubeSat for Earth Observation with a L-band Radiometer and a GNSS-Reflectometer Using Software Defined Radio. In Proceedings of the IGARSS 2019-2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 8867–8870. [Google Scholar] [CrossRef]
- Fernandez, L.; Sobrino, M.; Milian, O.; Aguilella, A.; Solanellas, A.; Badia, M.; Munoz-Martin, J.F.; Ruiz-de-Azua, J.A.; Sureda, M.; Camps, A. Deployment mechanism for a L-band helix antenna in 1-Unit Cubesat. Acta Astronaut. 2022, 196, 394–399. [Google Scholar] [CrossRef]
- ISIS. ISIS CubeSat Structures Brochure. 2016. Available online: https://www.isispace.nl/wp-content/uploads/2016/02/ISIS-CubeSat-Structures-Brochure-v1.pdf (accessed on 12 October 2023).
- ECSS Secretariat. Space Engineering Thermal Control General Requirements; European Cooperation for Space Standardization (ECSS): Noordwijk, The Netherlands, 2008. [Google Scholar]
- UPC NanoSat Lab. 3Cat-4 Thermal Analysis Report; Internal Technical Report; Universitat Politècnica de Catalunya: Barcelona, Spain, 2017. [Google Scholar]
- ECSS Secretariat. Thermal Design handbook-Part 2: Holes, Grooves and Cavities; European Cooperation for Space Standardization (ECSS): Noordwijk, The Netherlands, 2011. [Google Scholar]
- ECSS. Thermal Analysis Handbook; ECSS-E-HB-31-03A; ESA Requirements and Standards Division: Noordwijk, The Netherlands, 2016. [Google Scholar]
- European Space Agency. Ariane 6-Launch Vehicles. Available online: https://www.esa.int/Enabling_Support/Space_Transportation/Launch_vehicles/Ariane_6 (accessed on 17 January 2023).
- González-Bárcena, D.; Bermejo-Ballesteros, J.; Pérez-Grande, I.; Sanz-Andrés, Á. Selection of time-dependent worst-case thermal environmental conditions for Low Earth Orbit spacecrafts. Adv. Space Res. 2022, 70, 1847–1868. [Google Scholar] [CrossRef]
- ECSS Secretariat, ESA-ESTEC. ECSS-E-ST-10-04C Space Engineering-Space Environment; European Cooperation for Space Standardization (ECSS) Secretariat, ESA-ESTEC: Noordwijk, The Netherlands, 2010; Revised Version. 1. [Google Scholar]
- Gilmore, D.G.; Donabedian, M. Spacecraft Thermal Control Handbook; Aerospace Press: El Segundo, CA, USA, 2002; Volume 1. [Google Scholar]
- Raymond, E.S. AIVDM/AIVDO Protocol Decoding. Available online: https://gpsd.gitlab.io/gpsd/AIVDM.html (accessed on 17 April 2023).
- Kauder, L. Spacecraft Thermal Control Coatings References; NASA/Goddard Space Flight Center: Greenbelt, MD, USA, 2005. [Google Scholar]
- MatWeb Online Database. Available online: https://www.matweb.com (accessed on 7 July 2023).
- Hasselström, A.K.J.; Nilsson, U.E. Thermal Contact Conductance in Bolted Joints; Chalmers University of Technology: Gothenburg, Sweden, 2012. [Google Scholar]
- Yeh, C.L.; Wen, C.Y.; Chen, Y.F.; Yeh, S.H.; Wu, C.H. An experimental investigation of thermal contact conductance across bolted joints. Exp. Therm. Fluid Sci. 2001, 25, 349–357. [Google Scholar] [CrossRef]
- Roibás-Millán, E.; Alonso-Moragón, A.; Jiménez-Mateos, A.G.; Pindado, S. Testing solar panels for small-size satellites: The UPMSAT-2 mission. Meas. Sci. Technol. 2017, 28, 115801. [Google Scholar] [CrossRef]
- Tesa, “tesa®51408 Polyimide Adhesive Tape”. Available online: https://www.tesa.com/es-es/industria/tesa-51408.html (accessed on 9 September 2023).
- UPC NanoSat Lab. 3Cat-4 Specifications and Test Procedures Full Assembly Verification Environmental Test Campaign—Thermal and Vacuum Testing; Internal Technical Report; Universitat Politècnica de Catalunya: Barcelona, Spain, 2023; version 1.4. [Google Scholar]
- European Space Agency. Activity Log 3Cat-4 PFM TVAC Test-15 May to 3 June 2023; Internal Technical Report; European Space Agency: Paris, Frence, 2023. [Google Scholar]





| Satellite Operating Mode | Mean Power Consumption (mW) | Attitude State in Which It Can Occur | NADS Configuration | Consumptions (mW) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Commissioning phase | ||||||||||
| EPS | OBC | COMMS | FMPL-1 | ADCS | ZADS | NADS | ||||
| Standby (Sb) | 0 | RR | Stowed | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Released (R) | 798 | RR | Stowed | 160 | 194 | 0 | 0 | 0 | 13.2 | 26.4 |
| Pre-Detumbling (PD) | 518 | RR | Stowed | 160 | 194 | 259 | 0 | 12.2 | 0 | 26.4 |
| Detumbling (D) | 325 | RR | Stowed | 160 | 194 | 259 | 0 | 188 | 0 | 26.4 |
| Detumbled (Dd) | 542 | RR, NP | Stowed | 160 | 194 | 259 | 0 | 215 | 0 | 26.4 |
| Operational phase | ||||||||||
| Sun Safe (SS) | 542 | NP | Deployed | 160 | 194 | 259 | 0 | 215 | 0 | 26.4 |
| Nominal (N) | 419 | NP | Deployed | 160 | 194 | 358 | 15.3 | 215 | 0 | 26.4 |
| Survival (S) | 435 | NP | Deployed | 160 | 194 | 358 | 0 | 215 | 0 | 26.4 |
| Satellite Off (OFF) | 0 | NP | Deployed | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Thermal Margin | Description | Value |
|---|---|---|
| Uncertainty | Margin of safety applied to all calculated temperatures in order to account for inaccurate physical, environmental and modeling parameters. | ±10 °C |
| Acceptance | Is a contingency to account for unpredictable TCS-related events | ±5 °C |
| Qualification | Is a contingency to account for unexpected events. These temperature ranges are directly extracted from the manufacturer datasheets and are not the design temperature ranges. All systems where the manufacturer is not specified are custom made. Temperature ranges have been obtained from the most limiting temperatures of the used components. | ±5 °C |
| Subsystem | Acceptance Temperature Range (°C) | Design Temperature Range (°C) | ||
|---|---|---|---|---|
| Min | Max | Min | Max | |
| ZADS | −15 | 55 | −10 | 50 |
| ZADS (ISIS) | −15 | 55 | −10 | 50 |
| COMMS/AOCS | −30 | 70 | −25 | 65 |
| COMMS | −35 | 80 | −30 | 75 |
| AOCS | −30 | 70 | −25 | 65 |
| OBC+IB | −25 | 75 | -20 | 70 |
| OBC+IB Motherboard | −25 | 75 | −20 | 70 |
| Nanomind A3200 | −25 | 75 | −20 | 70 |
| EPS | 0 | 40 | 10 | 35 |
| EPS board (GomSpace) | −35 | 80 | −30 | 75 |
| EPS battery cells (GomSpace) | 5 | 40 | 10 | 35 |
| Payload (FMP) | −20 | 80 | −15 | 75 |
| Mainboard | −20 | 80 | −15 | 75 |
| Daughterboard | −20 | 80 | −15 | 75 |
| NADS | −35 | 80 | −30 | 75 |
| NADS Mainboard | −35 | 80 | −30 | 75 |
| Gravity boom | −68 | 116 | −63 | 111 |
| L-Band Helix Antenna | n/a | 116 | n/a | 111 |
| Fabric sheath (Precision Coating) | −68 | 275 | −63 | 280 |
| Counterweight | −195 | 255 | −190 | 250 |
| Upper Solar Panel (SP +Z) | −35 | 80 | −30 | 75 |
| Up-looking GPS antenna | −35 | 80 | −30 | 75 |
| Solar Cell | n/a | 145 | n/a | 140 |
| Photodiode | −35 | 120 | −30 | 115 |
| Temperature sensor | −50 | 120 | −45 | 115 |
| Lateral Solar Panels (SPs ±X and ±Y) | −35 | 120 | −30 | 115 |
| Solar Cell | n/a | 145 | n/a | 140 |
| Photodiode | −35 | 120 | −30 | 115 |
| Temperature sensor | −50 | 120 | −45 | 115 |
| Parameter | Vega Rocket | Ariane 6 |
|---|---|---|
| Semi-Major Axis (Km) | 6928–7028 km | 6958 km |
| Perigee height | 550–650 km | 580 km |
| Eccentricity | ∼0 | ∼0 |
| Inclination (deg) | 97.95° | 62.0° |
| Argument of Perigee (deg) | Free | Free |
| RAAN | 157.5° | Free |
| Estimated launch date | 2021-Q4 | 2024-Q3 |
| Heating Environment | Solar Flux (W/m) | Earth Albedo Factor | Earth IR (W/m) | Orbit Angle (°) |
|---|---|---|---|---|
| Hot Case | 1428 | 0.4 | 260 | 85.5 |
| Cold Case | 1316 | 0.2 | 240 | 0 |
| Extreme Hot Case | 1428 | 0.8 | 261 | 85.5 |
| Extreme Cold Case | 1316 | 0.05 | 189 | 0 |
| Case | Mode | Rotation (°/s) |
|---|---|---|
| Worst Cold/Cold Case | Released and Stowed | 10/30/60 All Axis |
| Worst Hot/Hot Case | Pre-detumbling and Stowed | 10/30/60 All Axis |
| Worst Cold/Cold Case | Sun safe and Deployed | 0 All Axis/2.5 Z axis/6 Z axis |
| Worst Hot/Hot Case | Nominal and Deployed | 0 All Axis/2.5 Z axis/6 Z axis |
| Worst Hot/Hot Case | Detumbling and Deployed | 0 All Axis/2.5 Z axis/6 Z axis |
| Material | Component (s) | Solar Absortivity () | IR Emissivity () | Conductivity (k) [W/m·K] | Specific Heat (cp) [J/kg·K] | Density () [kg/m3] |
|---|---|---|---|---|---|---|
| 0.81 (in plane) | ||||||
| FR-4 | PCBs | 0.12 | 0.94 | 0.29 (cross plane) | 1200 | 1900 |
| Copper | PCB Copper | - | - | 398 | 386 | 8930 |
| Aluminum 6082 | Side Frames, Ribs and Brackets Magnetorquer Z OBC shield | - | - | 170 | 900 | 2700 |
| Aluminum ASTM B211 | Threaded spacers | - | - | 234 | 900 | 2700 |
| Stainless Steel A2-70 | Threaded bars ZADS component | - | - | 16.2 | 500 | 8000 |
| Aluminium 1050A | Cylindric spacers ZADS component | - | - | 230 | 900 | 2700 |
| Alodine on Aluminum 6061-T6 | Cylindric spacers Threaded spacers Ribs and Brackets | 0.33 | 0.07 | - | - | - |
| Aluminium 7075 | NADS case FMP shield | - | - | 130 | 870 | 3000 |
| Black Anodized Aluminum | Side Frames Magnetorquer Z | 0.88 | 0.88 | - | - | - |
| Contact from | Contact with | Type of Contact | Material |
|---|---|---|---|
| COMMS microchip | COMMS/ADCS board | Perfect contact | Tin |
| ADCS microchip | COMMS/ADCS board | Perfect contact | Tin |
| Magnetorquer holders | COMMS/ADCS board | Screwing | Aluminum |
| Z Magnetorquer | COMMS/ADCS board | Screwing | Aluminum |
| EPS Batteries | EPS board | Perfect contact | Epoxi |
| EPS Batteries | Battery holders | Perfect contact | Epoxi |
| EPS Batteries | Heater (resistor) | Perfect contact | Epoxi |
| EPS microchip | EPS board | Perfect contact | Tin |
| OBC microchip | OBC inner layer | Perfect contact | Tin |
| OBC inner layer | OBC outer layer | Perfect contact | Tin |
| Deployment switch | OBC+IB | Perfect contact | Tin |
| FMP cond. board | FMP shield | Screwing | Aluminum |
| FMP acq. board | FMP shield | Screwing | Aluminum |
| Spacer EPS | OBC+IB | Union Point | Aluminum |
| Spacer EPS | COMMS/ADCS board | Union Point | Aluminum |
| Spacer OBC+IB | FMP board | Union Point | Aluminum |
| Spacer NADS | FMP board | Union Point | Aluminum |
| Spacer NADS | Lower Ribs | Union Point | Aluminum |
| Spacer ZADS | Upper Ribs | Union Point | Aluminum |
| NADS shield | NADS shield | Screwing | Aluminum |
| NADS antenna board | NADS deployment board | Screwing | Aluminum |
| NADS deployment board | NADS shield | Screwing | Aluminum |
| Number of Turns | Torque [Nm] | Conductance [kW/m2/K] | Observations | |||
|---|---|---|---|---|---|---|
| Min | Max | Min | Max | Average | ||
| 1 to 4 | 0.78 | 1.31 | 4.23 | 4.45 | 4.34 | N = 4 |
| 5 to 7 | 0.78 | 1.31 | 4.23 | 4.45 | 4.34 | N = 4 |
| 0.78 | 1.31 | 15.31 | 15.71 | 15.51 | N = 8 | |
| 9.93 | Average | |||||
| 8 or more | 0.78 | 1.31 | 15.31 | 15.71 | 15.51 | N = 8 |
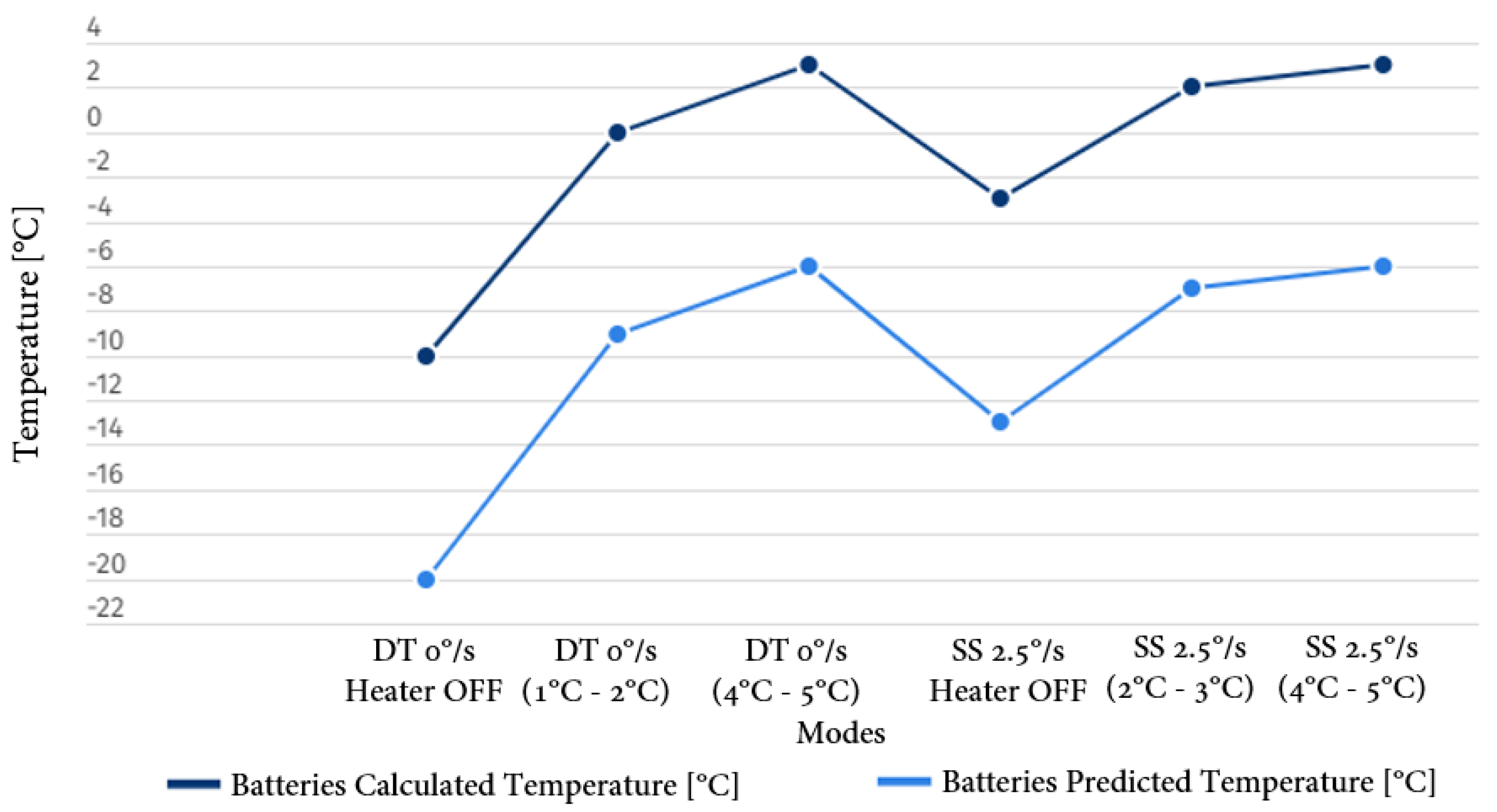
| Mode | Batteries Calculated Temperature (°C) | Batteries Predicted Temperature (°C) | ||
|---|---|---|---|---|
| Min | Max | Min | Max | |
| Detumbling 0°/s Z axis | −10.28 | 23.86 | −20.28 | 33.86 |
| Detumbling 1.5°/s Z axis | −3.49 | 25.39 | −13.49 | 35.39 |
| Detumbling 3.5°/s Z axis | −3.63 | 25.46 | −13.63 | 35.46 |
| Sun Safe 0°/s Z axis | −9.81 | 21.95 | −19.81 | 31.95 |
| Sun Safe 2.5°/s Z axis | −5.05 | 22.06 | −15.05 | 32.06 |
| Sun Safe 6°/s Z axis | −2.81 | 23.47 | −12.81 | 33.47 |
| Name | New Model | Old Model | Difference | |||
|---|---|---|---|---|---|---|
| Min (°C)> | Max (°C) | Min (°C) | Max (°C) | Min (°C) | Max (°C) | |
| COMMS_AOCS | −18.3 | 15.22 | −15.23 | 18.18 | 3.07 | 2.96 |
| COMMS_AOCS_ELEC | −16.08 | 14.68 | −10.64 | 13.3 | 5.44 | 1.38 |
| EPS | −8.8 | 11.7 | −7.48 | 14.9 | 1.32 | 3.20 |
| EPS_BATTERIES | −5.11 | 10.54 | −1.63 | 13.26 | 3.48 | 2.72 |
| EPS_ELEC | −5.31 | 12.16 | −2.07 | 15.36 | 3.24 | 3.19 |
| EPS_UNION | −5.12 | 10.69 | −1.65 | 13.41 | 3.48 | 2.72 |
| MOTHERBOARD | −7.11 | 16.84 | −5.85 | 14.37 | 1.26 | 2.47 |
| NADS | −8.98 | 11.32 | −11.06 | 15.44 | 2.07 | 4.13 |
| NADS_ANT | −33.81 | 10.56 | −33.28 | 14.53 | 0.53 | 3.97 |
| NADS_GB | −57.67 | −38.4 | −57.86 | −38.25 | 0.19 | 0.15 |
| NADS_POWER | −4.21 | 9.8 | N/A | N/A | N/A | N/A |
| NADS_SHEATH | −92.91 | 43.89 | −93.56 | 44 | 0.66 | 0.11 |
| PAYLOAD | −5.16 | 8.78 | −9.94 | 14.91 | 4.78 | 6.14 |
| PAYLOAD_ELEC | −4.05 | 7.85 | −5.94 | 12.97 | 1.90 | 5.13 |
| SOLAR_PANELS _LATERAL | −20.97 | 32.22 | −16.74 | 31.54 | 4.23 | 0.69 |
| SOLAR_PANEL_Z_UP | −21.88 | 20.45 | −17.63 | 20.84 | 4.26 | 0.39 |
| SPACE | −270.4 | −270.4 | −270.4 | −270.4 | 0.00 | 0.00 |
| STRUCTURE | −13.07 | 14.66 | −12.03 | 16.52 | 1.04 | 1.87 |
| STRUCTURE_RIBS | −20.35 | 23.2 | −16.1 | 21.29 | 4.25 | 1.91 |
| STRUCTURE_SIDE _FRAMES | −20.74 | 21.14 | −16.55 | 19.74 | 4.20 | 1.40 |
| STRUCTURE_SPACERS | −21 | 20.88 | −15.89 | 17.78 | 5.11 | 3.10 |
| STRUCTURE_ SPACERS_DAUGHTERS | −18.97 | 15.63 | −15.42 | 17.25 | 3.56 | 1.61 |
| ZADS | −20.82 | 18.41 | −16.61 | 18.69 | 4.21 | 0.28 |
| ZADS_COMPS | −92.75 | 66.83 | −93.05 | 67.12 | 0.30 | 0.29 |
| ZZ_HEATER | −4.99 | 10.4 | −1.47 | 13.16 | 3.52 | 2.76 |
| Duty Cycle | 7% | 11% | 12% |
|---|---|---|---|
| Mean Power EPS [W] | 0.364 | 0.481 | 0.510 |
| Total Power Consumption [W] | 1.08 | 1.19 | 1.22 |
| Available Budget | 0.126 | 0.00946 | −0.0197 |
| SunSafe Mode with 2.5°/s Rotation around the Z-Axis | ||||||
|---|---|---|---|---|---|---|
| Heater Hysteresis Temp. (°C) | Solar Panel Config. | Batteries Calculated Temp. (°C) | Batteries Predicted Temp. (°C) (±10°C) | Duty Cycle (%) | ||
| Min | Max | Min | Max | |||
| 9 to 10 | 2X White | 8.36 | 22.77 | −1.64 | 32.77 | 29.90% |
| 9 to 10 | −X Gold +X White | 8.50 | 23.23 | −1.50 | 33.23 | 26.20% |
| 9 to 10 | 2X Gold | 8.63 | 23.59 | −1.37 | 33.59 | 21.90% |
| 9 to 10 | −X Gold & +X Kapton | 8.61 | 23.60 | −1.39 | 33.60 | 22.80% |
| 9 to 10 | 2X Kapton | 8.62 | 23.60 | −1.38 | 33.60 | 22.35% |
| 8 to 9 | 2X White | 7.43 | 22.76 | −2.57 | 32.76 | 28.50% |
| 8 to 9 | −X Gold +X White | 7.57 | 23.21 | −2.43 | 33.21 | 23.70% |
| 8 to 9 | 2X Gold | 7.70 | 23.57 | −2.30 | 33.57 | 19.50% |
| 8 to 9 | −X Gold & +X Kapton | 7.69 | 23.59 | −2.31 | 33.59 | 20.36% |
| 8 to 9 | 2X Kapton | 7.65 | 23.46 | −2.35 | 33.46 | 21.19% |
| 7 to 8 | 2X White | 6.50 | 22.76 | −3.50 | 32.76 | 26.10% |
| 7 to 8 | −X Gold +X White | 6.65 | 23.23 | −3.35 | 33.23 | 21.30% |
| 7 to 8 | 2X Gold | 6.79 | 23.6 | −3.21 | 33.60 | 16.70% |
| 7 to 8 | −X Gold & +X Kapton | 6.77 | 23.60 | −3.23 | 33.60 | 17.65% |
| 7 to 8 | 2X Kapton | 6.74 | 23.48 | −3.26 | 33.48 | 18.55% |
| 6 to 7 | 2X White | 5.57 | 22.76 | −4.43 | 32.76 | 23.70% |
| 6 to 7 | −X Gold +X White | 5.73 | 23.23 | −4.27 | 33.23 | 18.70% |
| 6 to 7 | 2X Gold | 5.86 | 23.57 | −4.14 | 33.57 | 14.30% |
| 6 to 7 | −X Gold & +X Kapton | 5.85 | 23.62 | −4.15 | 33.62 | 14.84% |
| 6 to 7 | 2X Kapton | 5.81 | 23.47 | −4.19 | 33.47 | 15.95% |
| No Heaters | 2X White | −5.05 | 22.76 | −15.05 | 32.76 | 0.00% |
| No Heaters | −X Gold +X White | −3.06 | 23.22 | −13.06 | 33.22 | 0.00% |
| No Heaters | 2X Gold | −1.34 | 23.57 | −11.34 | 33.57 | 0.00% |
| No Heaters | −X Gold & +X Kapton | −1.43 | 23.61 | −11.43 | 33.61 | 0.00% |
| No Heaters | 2X Kapton | −1.94 | 23.47 | −11.94 | 33.47 | 0.00% |
| Nominal Mode with 2.5°/s Rotation around the Z-Axis | ||||
|---|---|---|---|---|
| Heater Hysteresis Temp. (°C) | Batteries Predicted Temp. (°C) | Batteries Calculated Temp. (°C) | ||
| Min | Max | Min | Max | |
| 2X White | 20.00 | 36.80 | 10.00 | 46.80 |
| −X Gold +X White | 20.00 | 35.06 | 10.00 | 45.06 |
| 2X Gold | 20.00 | 41.17 | 10.00 | 51.17 |
| −X Gold & +X Kapton | 20.00 | 40.46 | 10.00 | 50.46 |
| 2X Kapton | 20.00 | 40.82 | 10.00 | 50.82 |
| Subsystems | Design Temperature Operational Range (°C) | Calculated Temperatures (°C) | Predicted Temperatures (°C) | |||
|---|---|---|---|---|---|---|
| Min | Max | Min | Max | Min (−10) | Max (+10) | |
| Operational Subsystems | ||||||
| COMMS/AOCS | −25 | 65 | 16.70 | 31.32 | 6.70 | 41.32 |
| EPS board | −30 | 75 | 20.36 | 33.48 | 10.36 | 43.48 |
| EPS batteries (charge) | 0 | 45 | 21.43 | 32.52 | 11.43 | 42.52 |
| EPS batteries (discharge) | −20 | 60 | 21.43 | 32.52 | 11.43 | 42.52 |
| OBC+IB | −20 | 70 | 20.68 | 35.89 | 10.68 | 45.89 |
| NADS mainboard | −30 | 75 | 20.18 | 31.63 | 10.18 | 41.63 |
| Upper SP (+Z) | −30 | 115 | 12.95 | 29.56 | 2.95 | 39.56 |
| Upper SP (+Z) antenna | −30 | 115 | 12.95 | 29.56 | 2.95 | 39.56 |
| Lateral SP (±X±Y) | −30 | 115 | 16.07 | 36.13 | 6.07 | 46.13 |
| ZADS | −40 | 75 | 16.64 | 30.69 | 6.64 | 40.69 |
| FMP mainboard | −15 | 75 | 20.88 | 32.31 | 10.88 | 42.31 |
| FMP daughterboard | −15 | 75 | 21.22 | 32.03 | 1.22 | 42.03 |
| Non-operational Subsystems | ||||||
| NADS antenna | N/A | 111 | 5.16 | 31.10 | −5.16 | 41.10 |
| NADS counterweight | −190 | 250 | −37.01 | −34.72 | −47.01 | −24.72 |
| NADS sheat | −73 | 260 | −31.91 | 41.98 | −41.91 | 51.98 |
| Structure frame | N/A | N/A | 27.01 | 32.68 | 17.01 | 43.19 |
| Subsystems | Design Temperature Operational Range (°C) | Calculated Temperatures (°C) | Predicted Temperatures (°C) | |||
|---|---|---|---|---|---|---|
| Min | Max | Min | Max | Min (−10) | Max (+10) | |
| Operational Subsystems | ||||||
| COMMS/AOCS | −25 | 65 | −5.04 | 28.92 | −15.04 | 38.92 |
| EPS board | −30 | 75 | 4.64 | 28.62 | −5.36 | 38.62 |
| EPS batteries (charge) | 0 | 45 | 11.04 | 27.63 | 1.04 | 37.63 |
| EPS batteries (discharge) | −20 | 60 | 11.04 | 27.63 | 1.04 | 37.63 |
| OBC+IB | −20 | 70 | 6.99 | 29.29 | −3.01 | 39.29 |
| NADS mainboard | −30 | 75 | 5.02 | 26.44 | −4.98 | 36.44 |
| Upper SP (+Z) | −30 | 115 | −9.01 | 30.78 | −19.01 | 40.78 |
| Upper SP (+Z) antenna | −30 | 115 | −9.01 | 30.78 | −19.01 | 40.78 |
| Lateral SP (±X±Y) | −30 | 115 | −8.09 | 31.28 | −18.09 | 41.28 |
| ZADS | −40 | 75 | −7.50 | 29.18 | −17.50 | 39.18 |
| FMP mainboard | −15 | 75 | 8.97 | 26.40 | −1.03 | 36.40 |
| FMP daughterboard | −15 | 75 | 10.02 | 26.04 | 0.02 | 36.04 |
| Non-operational Subsystems | ||||||
| NADS antenna | N/A | 111 | −20.61 | 26.11 | −30.61 | 36.11 |
| NADS counterweight | −190 | 250 | −49.16 | 25.00 | −59.16 | 35.00 |
| NADS sheat | −73 | 260 | 90C5F6−90.59 | 36.90 | 90C5F6−100.59 | 46.90 |
| Structure frame | N/A | N/A | −7.88 | 28.90 | −17.88 | 38.90 |
| Subsystem | Status in Cold Cases | Status in Hot Case |
|---|---|---|
| EPS | ON | ON |
| COMMS | ON (telemetry each 60 s) | ON (telemetry each 30 s) |
| OBC | ON | ON |
| ADCS | ON (no actuation, only telemetry) | ON (nadir-pointing actuation) |
| FMP | OFF | ON |
| ZADS | ON | ON |
| NADS | ON | ON |
| Parameter | Description | Value |
|---|---|---|
| Tmax, NON-OP | Maximum non-operational acceptance temperature | For this test, it is +60 °C |
| Tmax, OP | Maximum operational acceptance temperature | For this test, it is +45 °C |
| Tmax, hot switch-on | Maximum switch on temperature | For this test, it is +45 °C |
| Tamb | Ambient temperature | +22 °C |
| Tmin, OP | Minimum operational acceptance temperature | For this test, it is −10 °C |
| Tmin, switch-on | Minimum switch on temperature | For this test, it is −10 °C |
| Tmin, NON-OP | Minimum non-operational acceptance temperature | For this test, it is −20 °C |
| Tmax, TBal | Maximum thermal balance temperature | For this test, it is +40 °C |
| Tmin, TBal | Minimum thermal balance temperature | For this test, it is −5 °C |
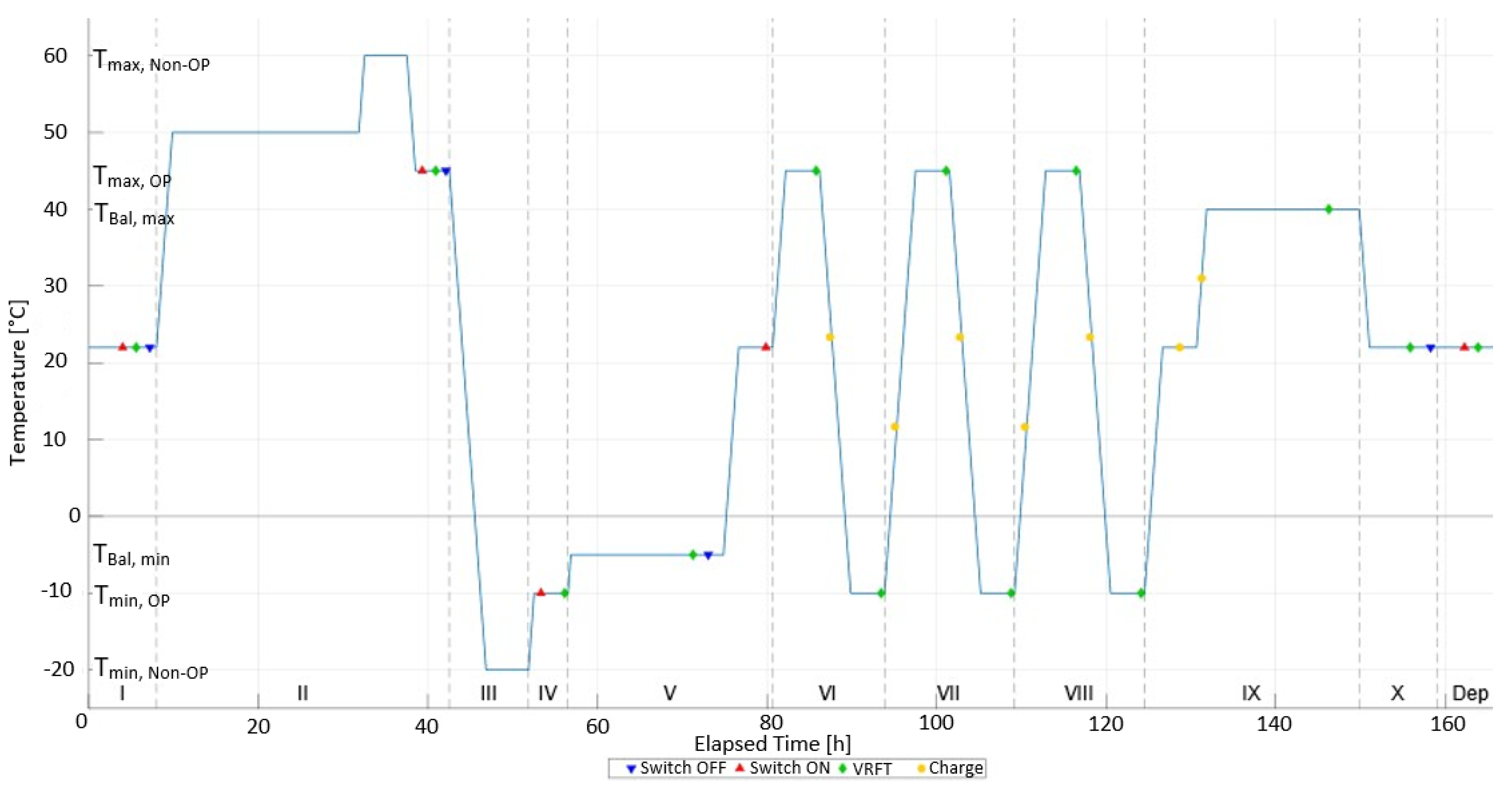
| Test Phase Title | Test Phase Description | Test Phase Duration | |
|---|---|---|---|
| I | Initial ambient plateau | Initial ambient plateau with the intention to stabilize temperature in between 0.5 K during 4 h. | 4 h |
| II | Hot non-op test phase/ Bake-out/ hot switch on | Bake-out of 20 h at 50 ºC. Expose the CubeSat to the hot non-operational temperature, which is 60 ºC [−0 ºC/+4 ºC]. Hot switch-on with VRFT at the hot operational temperature of 45 ºC [−0 ºC/+4 ºC]. | 34 h |
| III | Cold non-op test phase | Expose the CubeSat to the cold non-operational temperature, which is −20 ºC [−4 ºC/+0 ºC]. | 9 h |
| IV | Cold switch-on phase | Increase temperature to cold switch-on operational temperature (−10 ºC [−4 ºC/+0 ºC]) and switch-on CubeSat. Monitor heater cycling and perform functional test. Possibility to stop test here if failure is encountered. | 5 h |
| V | Cold thermal balance | Thermal balance performed at a temperature of −5 ºC. | 24 h |
| VI | Operational Cycle 1 | Cycle within hot and cold operational temperature range, performing charge tests while slope up and slope down between temperature ranges from −10 ºC [−4 ºC/+0 ºC] to 45 ºC [−0 ºC/+4 ºC]. | 14 h |
| VII | Operational Cycle 2 | Cycle within hot and cold operational temperature range, performing charge tests while slope up and slope down between temperature ranges, from −10 ºC [−4 ºC/+0 ºC] to 45 ºC [−0 ºC/+4 ºC]. | 15 h 30 min |
| VIII | Operational Cycle 3 | Cycle within hot and cold operational temperature range, performing charge tests while slope up and slope down between temperature ranges from −10 ºC [−4 ºC/+0 ºC] to 45 ºC [ 0 ºC/+4 ºC]. | 15 h 30 min |
| IX | Hot thermal balance | Thermal balance performed at a temperature of 40 ºC. | 25 h 30 min |
| X | Return to ambient temperature and switch-off. | Ramp down from hot TBal after the last VRFT to ambient temperature, S/C switch-off after stabilisation at ambient temperature. | 9 h |
| Dep | Depressurization | After return to ambient pressure, a VRFT is performed. |
| Parameter | Value | Location |
|---|---|---|
| Maximum non-operational acceptance temperature | 60 °C | TRP |
| Maximum operational acceptance temperature | 45 °C | Batteries |
| Maximum switch on temperature | 45 °C | Batteries |
| Ambient temperature | 22 °C | TRP |
| Minimum operational acceptance temperature | −18 °C | Batteries |
| Minimum switch on temperature | −18 °C | Batteries |
| Minimum non-operational acceptance temperature | −20 °C | TRP |
| Maximum thermal balance temperature | 43 °C | Batteries |
| Minimum thermal balance temperature | 0 °C | TRP |
| Name_Node | # Node | Thermocouple | Calculated | Predicted | ||
|---|---|---|---|---|---|---|
| Min | Max | Min | Max | |||
| STRUCTURE_SIDE_FRAMES.102018 | 102018 | TC1-TRP | −24.82 | 10.49 | −34.82 | 20.49 |
| EPS_BATTERIES.279 | 279 | TC2-Batt | 4.95 | 5.72 | −5.05 | 15.72 |
| PAYLOAD.13 | 13 | TC3-Overo | −8.16 | 1.22 | −18.16 | 11.22 |
| EPS.387 | 387 | TC4-EPS-PCB | −0.16 | 5.09 | −10.16 | 15.09 |
| COMMS_AOCS.218 | 218 | TC5-ADCS | −19.95 | 5.87 | −29.95 | 15.87 |
| MOTHERBOARD.78 | 78 | TC6-IB | −3.05 | 3.18 | −13.05 | 13.18 |
| STRUCTURE_SIDE_FRAMES.103021 | 103021 | TC7-STR | −24.54 | 9.86 | −34.54 | 19.86 |
| MOTHERBOARD.947 | 947 | TC8-OBC-Shield | 0.63 | 5.16 | −9.37 | 15.16 |
| ZADS.516 | 516 | TC9-ZADS | −24.31 | 8.18 | −34.31 | 18.18 |
| SOLAR_PANELS_LATERAL.2518 | 2518 | TC10-nX-SP | −25.48 | 17.80 | −35.48 | 27.80 |
| SOLAR_PANELS_LATERAL.3215 | 3215 | TC11-Y-SP | −25.16 | 1.13 | −35.16 | 11.13 |
| NADS.46 | 46 | TC12-NADS-RF | −14.62 | 1.60 | −24.62 | 11.60 |
| Name_Node | # Node | Thermocouple | Calculated | Predicted | ||
|---|---|---|---|---|---|---|
| Min | Max | Min | Max | |||
| STRUCTURE_SIDE_FRAMES.102018 | 102018 | TC1-TRP | −17.61 | 19.01 | −27.61 | 29.01 |
| EPS_BATTERIES.279 | 279 | TC2-Batt | 5.04 | 14.39 | −4.96 | 24.39 |
| PAYLOAD.13 | 13 | TC3-Overo | −0.21 | 11.30 | −10.21 | 21.30 |
| EPS.387 | 387 | TC4-EPS-PCB | 1.68 | 14.89 | −8.32 | 24.89 |
| COMMS_AOCS.218 | 218 | TC5-ADCS | −13.11 | 17.90 | −23.11 | 27.90 |
| MOTHERBOARD.78 | 78 | TC6-IB | 3.51 | 12.34 | −6.49 | 22.34 |
| STRUCTURE_SIDE_FRAMES.103021 | 103021 | TC7-STR | −17.39 | 18.96 | −27.39 | 28.96 |
| MOTHERBOARD.947 | 947 | TC8-OBC-Shield | 7.43 | 13.99 | −2.57 | 23.99 |
| ZADS.516 | 516 | TC9-ZADS | −17.18 | 18.27 | −27.18 | 28.27 |
| SOLAR_PANELS_LATERAL.2518 | 2518 | TC10-nX-SP | −18.18 | 19.87 | −28.18 | 29.87 |
| SOLAR_PANELS_LATERAL.3215 | 3215 | TC11-Y-SP | −17.94 | 22.09 | −27.94 | 32.09 |
| NADS.46 | 46 | TC12-NADS-RF | −6.39 | 13.57 | −16.39 | 23.57 |
| Name_Node | # Node | Thermocouple | Calculated | Predicted | ||
|---|---|---|---|---|---|---|
| Min | Max | Min | Max | |||
| STRUCTURE_SIDE_FRAMES.102018 | 102018 | TC1-TRP | 23.93 | 37.73 | 13.93 | 47.73 |
| EPS_BATTERIES.279 | 279 | TC2-Batt | 32.12 | 33.27 | 22.12 | 43.27 |
| PAYLOAD.13 | 13 | TC3-Overo | 31.82 | 33.14 | 21.82 | 43.14 |
| EPS.387 | 387 | TC4-EPS-PCB | 32.07 | 33.28 | 22.07 | 43.28 |
| COMMS_AOCS.218 | 218 | TC5-ADCS | 28.85 | 32.56 | 18.85 | 42.56 |
| MOTHERBOARD.78 | 78 | TC6-IB | 33.01 | 34.29 | 23.01 | 44.29 |
| STRUCTURE_SIDE_FRAMES.103021 | 103021 | TC7-STR | 24.56 | 36.23 | 14.56 | 46.23 |
| MOTHERBOARD.947 | 947 | TC8-OBC-Shield | 35.95 | 36.68 | 25.95 | 46.68 |
| ZADS.516 | 516 | TC9-ZADS | 25.45 | 32.99 | 15.45 | 42.99 |
| SOLAR_PANELS_LATERAL.2518 | 2518 | TC10-nX-SP | 21.70 | 43.23 | 11.70 | 53.23 |
| SOLAR_PANELS_LATERAL.3215 | 3215 | TC11-Y-SP | 21.49 | 46.08 | 11.49 | 56.08 |
| NADS.46 | 46 | TC12-NADS-RF | 30.75 | 32.47 | 20.75 | 42.47 |
| Name_Node | Thermocouple | Calculated | Predicted | Test | |||
|---|---|---|---|---|---|---|---|
| Non-OP | OP | Non-OP | OP | SubSys | System | ||
| STRUCTURE_SIDE_FRAMES | TC1-TRP | 37.73 | - | 47.73 | - | 80 (90) | 35.9 |
| EPS_BATTERIES (Charge) | TC2-Batt | - | 33.70 | - | 43.70 | 45 | 43.6 |
| EPS_BATTERIES (Disharge) | TC2-Batt | - | 33.70 | - | 43.70 | 60 | 43.6 |
| PAYLOAD | TC3-Overo | 32.71 | 33.29 | 42.71 | 43.29 | 45 | 62.2 |
| EPS | TC4-EPS-PCB | - | 33.72 | - | 43.72 | 80 | 43.1 |
| COMMS_AOCS | TC5-ADCS | 31.71 | 32.56 | 41.71 | 42.56 | 65.94 | 41.9 |
| MOTHERBOARD (IB) | TC6-IB | 34.47 | - | 44.47 | - | NA | 44.1 |
| STRUCTURE_SIDE_FRAMES | TC7-STR | 36.23 | - | 46.23 | - | 80 (90) | 36.0 |
| MOTHERBOARD (OBC) | TC8-OBC-Shield | - | 36.98 | - | 46.98 | 60 (85) | 45.5 |
| ZADS | TC9-ZADS | 31.06 | 32.99 | 41.06 | 42.99 | 60 | 36.8 |
| SOLAR_PANELS_LATERAL (-X) | TC10-nX-SP | - | 43.23 | - | 53.23 | NA | 35.9 |
| SOLAR_PANELS_LATERAL (+Y) | TC11-Y-SP | - | 46.08 | - | 56.08 | NA | 35.7 |
| NADS | TC12-NADS-RF | 32.04 | 32.62 | 42.04 | 42.62 | 55 | 37.7 |
| Name_Node | Thermocouple | Calculated | Predicted | Test | |||
|---|---|---|---|---|---|---|---|
| Non-OP | OP | Non-OP | OP | SubSys | System | ||
| STRUCTURE_SIDE_FRAMES | TC1-TRP | −24.82 | −34.82 | −25 (−50) | −31.5 | ||
| EPS_BATTERIES (Charge) | TC2-Batt | - | 4.95 | - | −5.05 | 0 | 41.5 |
| EPS_BATTERIES (Disharge) | TC2-Batt | - | 4.95 | - | −5.05 | −20 | −17.3 |
| PAYLOAD | TC3-Overo | −4.78 | −8.16 | −14.78 | −18.16 | −45 | −23.3 |
| EPS | TC4-EPS-PCB | - | −0.16 | - | −10.16 | −20 (−40) | −17.3 |
| COMMS_AOCS | TC5-ADCS | −19.95 | −16.99 | −29.95 | −26.99 | −27.1 | −23.9 |
| MOTHERBOARD (IB) | TC6-IB | −3.05 | −13.05 | NA | −19.8 | ||
| STRUCTURE_SIDE_FRAMES | TC7-STR | −24.54 | −34.54 | −25 (−50) | −31.4 | ||
| MOTHERBOARD (OBC) | TC8-OBC-Shield | - | 0.63 | - | −9.37 | −20 (−30) | −18.7 |
| ZADS | TC9-ZADS | −20.95 | −24.31 | −30.95 | −34.31 | −20 (−40) | −29.7 |
| SOLAR_PANELS_LATERAL (−X) | TC10-nX-SP | - | −25.48 | - | −35.48 | NA | −31.7 |
| SOLAR_PANELS_LATERAL (+Y) | TC11-Y-SP | - | −25.16 | - | −35.16 | NA | −31.1 |
| NADS | TC12-NADS-RF | −14.62 | −10.84 | −24.62 | −20.84 | −60 | −29.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buitrago-Leiva, J.N.; Terraza-Palanca, I.; Contreras-Benito, L.; Fernandez, L.; Gracia-Sola, G.; del Castillo Sancho, C.; Ha, L.; Palma, D.; Solyga, M.; Camps, A. The 3Cat-4 Spacecraft Thermal Analysis and Thermal Vacuum Test Campaign Results. Aerospace 2024, 11, 805. https://doi.org/10.3390/aerospace11100805
Buitrago-Leiva JN, Terraza-Palanca I, Contreras-Benito L, Fernandez L, Gracia-Sola G, del Castillo Sancho C, Ha L, Palma D, Solyga M, Camps A. The 3Cat-4 Spacecraft Thermal Analysis and Thermal Vacuum Test Campaign Results. Aerospace. 2024; 11(10):805. https://doi.org/10.3390/aerospace11100805
Chicago/Turabian StyleBuitrago-Leiva, Jeimmy Nataly, Ines Terraza-Palanca, Luis Contreras-Benito, Lara Fernandez, Guillem Gracia-Sola, Cristina del Castillo Sancho, Lily Ha, David Palma, Malgorzata Solyga, and Adriano Camps. 2024. "The 3Cat-4 Spacecraft Thermal Analysis and Thermal Vacuum Test Campaign Results" Aerospace 11, no. 10: 805. https://doi.org/10.3390/aerospace11100805
APA StyleBuitrago-Leiva, J. N., Terraza-Palanca, I., Contreras-Benito, L., Fernandez, L., Gracia-Sola, G., del Castillo Sancho, C., Ha, L., Palma, D., Solyga, M., & Camps, A. (2024). The 3Cat-4 Spacecraft Thermal Analysis and Thermal Vacuum Test Campaign Results. Aerospace, 11(10), 805. https://doi.org/10.3390/aerospace11100805