4.3.1. Approximation of the Fluidized Bed Process
Dewettinck et al. [
49] conducted a comprehensive study involving a physical experiment and the development of associated computer models aimed at predicting the steady-state thermodynamic operation of a GlattGPC-1 fluidized bed unit. This unit comprised a base featuring a screen and air jump, complemented by coating sprayers positioned along the unit’s sides. Quian and Wu [
23] introduced a Bayesian hierarchical Gaussian process model designed to concurrently analyze both experimental data and computer simulations. Chen et al. [
39] contributed to the analysis of the same dataset, offering non-hierarchical multi-model fusion techniques, including WS, PC-DIT, and PC-CSC. In a parallel effort, Zhang et al. [
37] applied their proposed LRMFS approach to address the same problem.
In this section, a comprehensive comparison was conducted to evaluate the effectiveness of the proposed EHK method against six existing MFSM methods, namely ECK, LRMFS, WS, PC-DIT, and PC-CSC, utilizing the reported datasets from the fluidized bed process example. Furthermore, the influence of incorporating different LF datasets was explored on the outcomes of the analysis.
The focus of this study was the determination of temperature (T
2) at the steady-state thermodynamic operational point within a fluidized bed process. This temperature is subject to variation due to six key variables: the humidity, the room temperature, the temperature of the air from the pump, the flow rate of the coating solution, the pressure of atomized air, and the fluid velocity of the fluidization air. The foundational data for the investigation has been sourced from prior research [
23,
49], which meticulously documented these six input variables and the corresponding responses. This dataset was collected through a combination of experimental measurements and computer simulations, encompassing a diverse range of 28 distinct process conditions. Notably, the experiments featured the use of distilled water as the coating solution at room temperature. The analysis placed a particular emphasis on several output variables, which were categorized into four fidelity levels: T
2,exp, T
2,3, T
2,2, and T
2,1. Here, T
2,exp was designated as the highest-fidelity experimental response. In contrast, T
2,3 reflected the most precise simulation, incorporating adjustments to account for heat losses and inlet airflow. T
2,2 offered intermediate accuracy, considering adjustments associated with heat losses, while T
2,1 represented the lowest level of accuracy, devoid of any adjustments related to either heat losses or inlet airflow.
In previous research, Quian and Wu [
23] limited their analysis to data derived from T
2,2 and T
2,exp. However, Chen et al. [
39] took a more comprehensive approach by incorporating additional data from a less accurate model, T
2,1, to enhance their final predictions compared to the work of Quian and Wu. The primary focus of this study was the prediction of the high-fidelity dataset T
2,exp using the EHK method, with datasets T
2,1 and T
2,2 serving as the low-fidelity counterparts. All 28 runs of T
2,1 and T
2,2, along with the remaining 20 runs of T
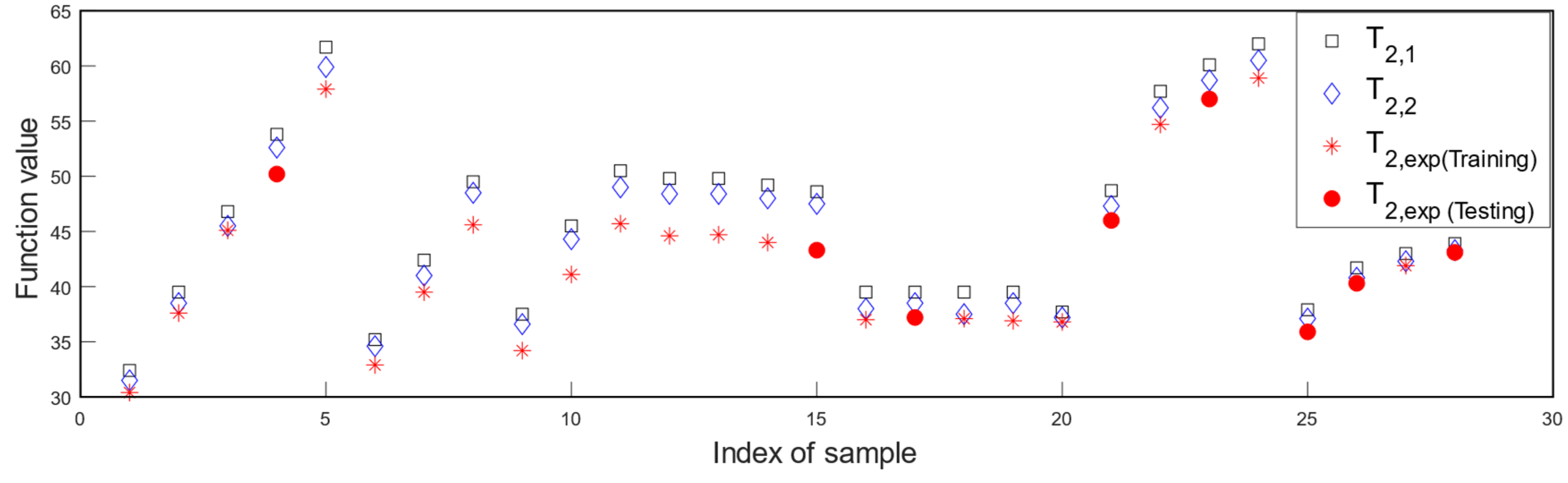
2,exp, were utilized for training the approximation models. To validate the resulting models, eight specific physical experiment runs, corresponding to T
2,exp (specifically runs 4, 15, 17, 21, 23, 25, 26, and 28, as previously employed by Quian and Wu) were reserved as shown in
Figure 7. The correlation coefficients between the computer simulation datasets, T
2,1 and T
2,2, and the experiment dataset T
2,exp were reported as 0.9754 and 0.9774, respectively. These values indicated that the dataset T
2,2 exhibited a slightly stronger correlation with the experimental dataset T
2,exp compared to T
2,1.
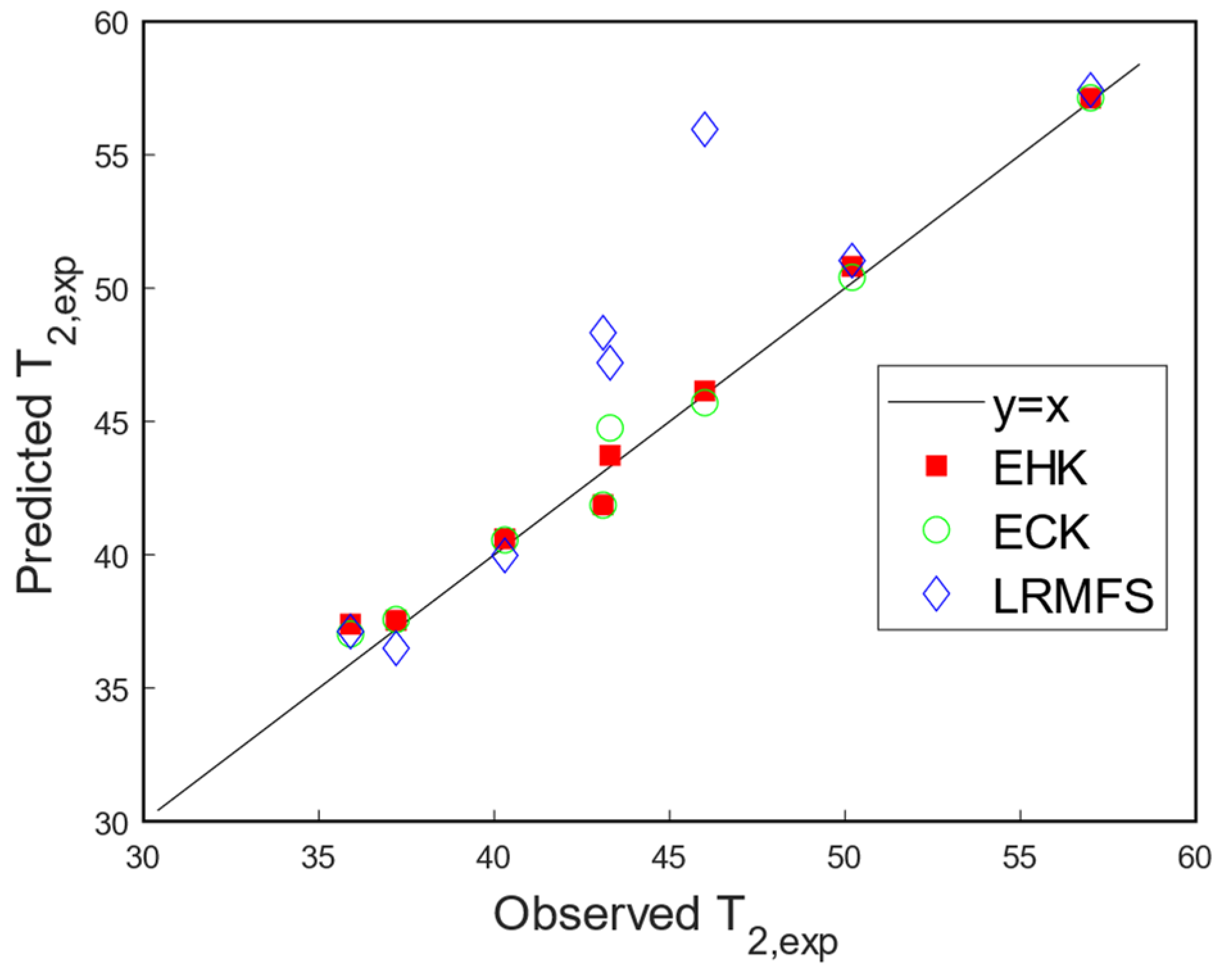
Figure 8 demonstrates the predictions of the EHK, ECK, and LRMFS models at eight reserved validation points against the experimentally observed steady-state outlet air temperatures. For the majority of validation points, both the EHK and ECK models closely aligned with the
y =
x line, indicating a high degree of accuracy in their predictions, which closely matched the observed values. In contrast, the predictions of the LRMFS model exhibited lower accuracy.
For a more in-depth assessment of the model performance, a comprehensive comparison of MFSM models with respect to various metrics was provided in
Table 8. In addition to comparing the proposed EHK model with the ECK and LRMFS models, previous works from Chen et al. were also included for a comprehensive evaluation.
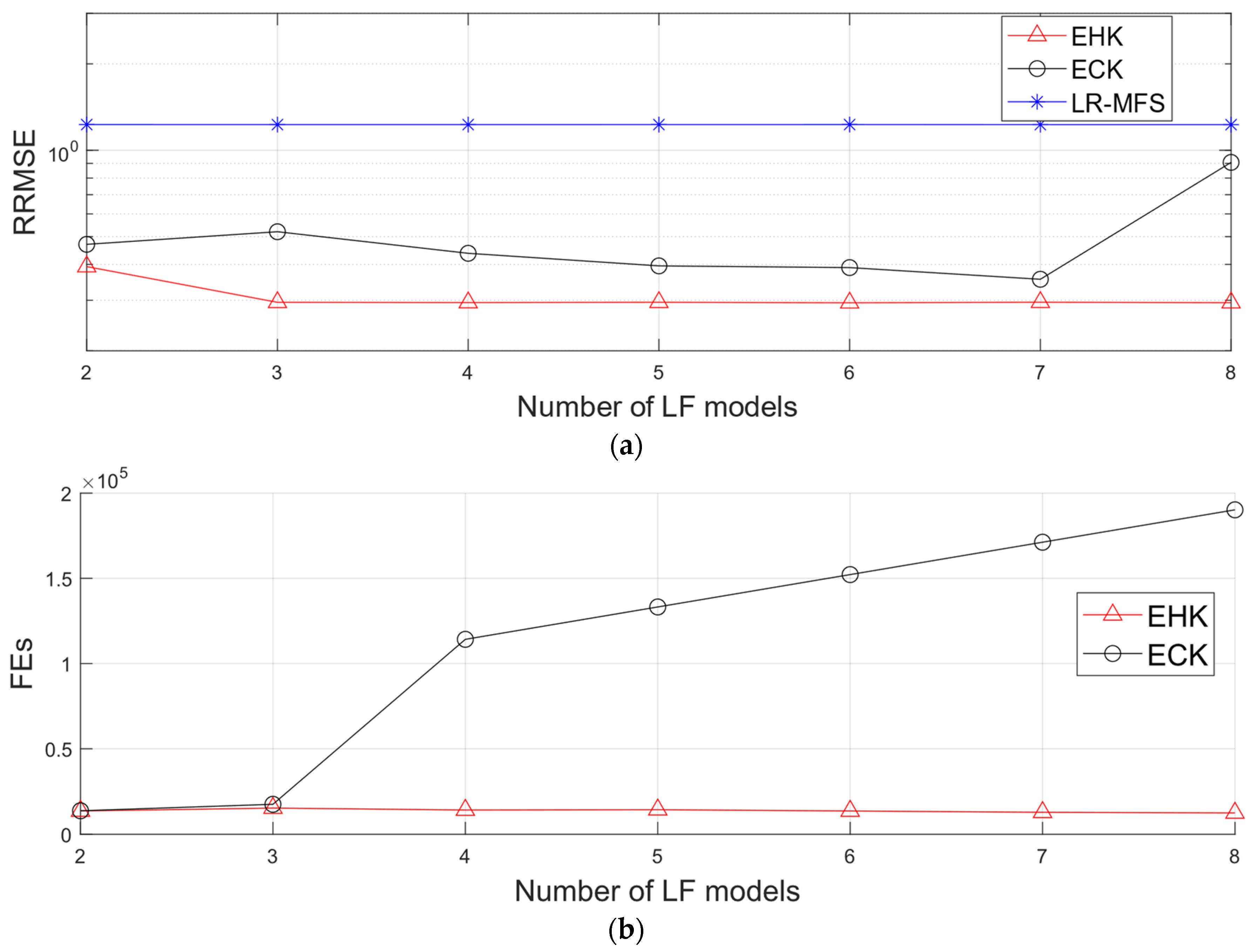
In this example, the EHK model demonstrated a substantial reduction in the number of tuning hyperparameters compared to other models. It consistently maintained a minimal set of six hyperparameters, corresponding to the dimensions of the training data, regardless of the number of incorporated datasets. In contrast, the ECK, WS, PC-DIT, and PC-CSC models had a significantly higher number of hyperparameters, often exceeding that of the EHK model by more than three times. This substantial difference in the number of hyperparameters led to a considerable increase in computational cost, measured in FEs, particularly for the ECK model, which needed to estimate 20 hyperparameters. Consequently, the EHK model achieved a notable 73.9% reduction in computational cost compared to the ECK model, highlighting its computational efficiency. This efficiency can be attributed to the advanced framework and model-processing algorithm inherent to the EHK method.
Furthermore, estimated scaling factors, denoted as and , associated with datasets T2,1 and T2,2, respectively, in different models were provided. It was observed that the values of were considerably larger than in all EHK, ECK, and LRMFS models, indicating that dataset T2,2 was assigned greater weight due to its higher fidelity. This correlation between the values of scaling factors aligned with the reported values of the correlation coefficients between the simulation datasets T2,1 and T2,2, and the experimental dataset T2,exp. Lastly, the metrics of RRMSE and RMAE indicated that the EHK model attained a slightly higher level of accuracy compared to the other approaches. In contrast, the LRMFS model exhibited the poorest performance, despite having the lowest cost of model processing. The EHK model’s reduction in the error metric RRMSE ranged from a maximal value of 84% to a minimal value of 5.35% when compared with the LRMFS and PC-DIT models, respectively. Regarding the RMAE metric, the comparison involved only the EHK, ECK, and LRMFS methods since no estimation of the metric for the WS, PC-DIT, and PC-CSC models was reported in the original work. The EHK model’s reductions in RMAE over the ECK and LRMFS models were 36.89% and 86.88%, respectively. These findings underscored the EHK model’s enhanced accuracy and efficiency in this particular analysis.
In conclusion, the EHK method has demonstrated its prowess as a formidable solution for approximating the fluidized bed process, even when dealing with six-dimensional and three-fidelity-level datasets. Its superior performance, when compared to existing approaches, underscored its potential to revolutionize the field of engineering. EHK’s precision and efficiency position it as a valuable tool for addressing complex engineering design problems, offering innovative solutions, and driving progress within the industry.
4.3.2. Generation of Aerodynamic Models for an eVTOL Vehicle for Urban Air Mobility
In this application, the EHK method was employed to develop aerodynamic models of six aerodynamic coefficients for an eVTOL-KP2 aircraft [
50,
51], including: drag coefficient (
), lift coefficient
, pitching moment coefficient
, side force coefficient (
), rolling moment coefficient (
), and yawing moment coefficient (
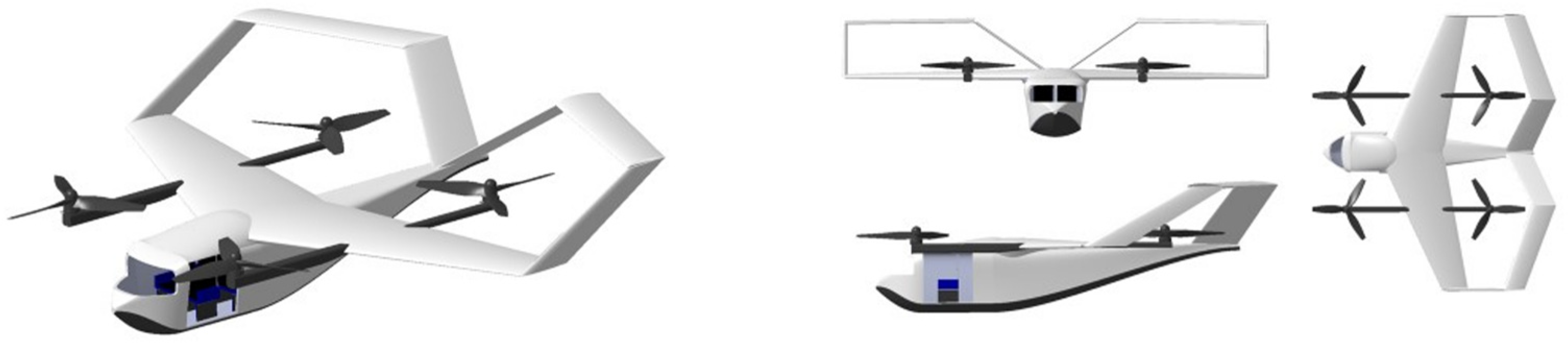
). The tridimensional depiction of the KP-2 design is illustrated in
Figure 9, accompanied by a comprehensive overview of its design characteristics provided in
Table 9.
The input data consist of two independent variables, representing simulated flight conditions: the angle of attack and the sideslip angle, denoted as
and
, respectively. These variables were constrained within the ranges of
and
, while the simulation was conducted at a fixed velocity of 25 m/s. The initial training datasets were generated using three distinct analysis methods, each offering varying levels of fidelity. The LHS method was employed to create sampling plans for the HF and LF analyses. The HF dataset encompassed 80 sample points produced through CFD analysis using ANSYS-Fluent 2020 R2 software, while the LF datasets were generated using the HETLAS [
52], AVL [
53], and XFLR5 [
54] analysis tools, resulting in three LF datasets, each comprising 1300 sample points. It is worth noting that while HETLAS, AVL, and XFLR5 are considered low-fidelity analysis tools, they offer the advantage of producing a large volume of data points, spanning a wide spectrum of flight conditions at a relatively modest computational cost. The EHK method was applied in this study to construct surrogate models of aerodynamic coefficients using varying numbers of CFD samples, ranging from 9 to 80 data points, as detailed in
Table 10. To ensure the accuracy of the constructed models and mitigate the influence of the design of experiments, the sampling was repeated 10 times for each number of CFD samples, randomly generating different CFD sampling plans from the pool of 80 generated CFD data points.
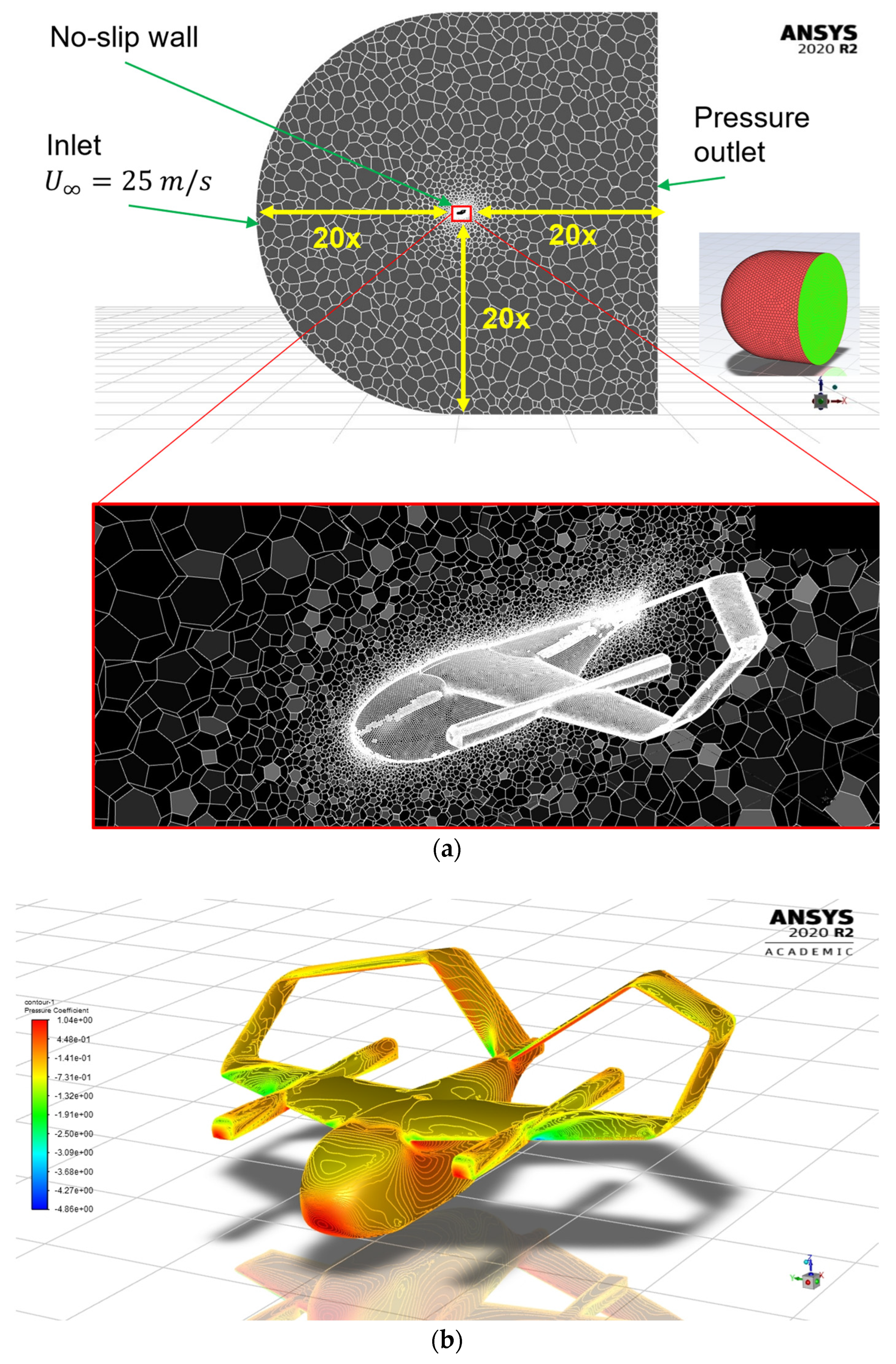
Figure 10 shows a 1/4-scale model of a KP-2 aircraft for simulation, and an unstructured mesh with 10,970,498 cells was applied for the CFD model. For the CFD analysis, a 3D model of the KP-2 aircraft was discretized into the numerical domain using the unstructured meshing method. The surface mesh was generated through Ansys Fluent meshing, employing an unstructured triangle mesh. The dimensions of the computational domain, depicted in
Figure 10a, were set to 20 times the length of the fuselage in all directions. In each simulation case, the aircraft was oriented to the respective
and
. The inlet boundary condition enforced a constant velocity on the semi-spherical face of the domain and the lateral wall of the cylinder. Pressure outlet boundary conditions were applied at the end of the domain.
To enhance flow accuracy near the wall boundary layer, a 20-layer prism mesh with a Yplus value set to 1 was applied on top of the surface mesh. The Yplus value dictates the mesh’s ability to capture the boundary layer flow phenomena, representing the distance of the first layer of the boundary layer mesh. This structured mesh was then extruded into a volume mesh using a tetrahedral mesh configuration. Subsequently, for increased convergence rates and reduced mesh size, the unstructured mesh was converted into a polyhedral mesh using ANSYS Fluent 2020 R2 meshing, as illustrated in
Figure 10b.
The three-dimensional compressible fluid flow is simulated using the Reynolds-averaged Navier–Stokes (RANS) equations, assuming incompressible flow due to the low Mach number achieved by the aircraft. For stall conditions, where the high angle of attack may lead to boundary layer separation on certain zones of the aircraft surface, an appropriate turbulence model capable of accounting for such separation is necessary. In this analysis, the shear stress transport k–ω turbulent model was employed to simulate the aerodynamics of the wing and the entire aircraft. The set of governing equations was solved in Ansys Fluent using the SIMPLE algorithm for pressure–velocity decoupling [
55]. The simulations were carried out on a computer featuring a configuration of an Intel
® Xeon
® W-2265 CPU @3.50 GHz, 12 cores, and 128 GB of RAM. The total computational time for the AVL and HETLAS cases amounted to a couple of hours, demonstrating efficient processing. In contrast, the CFD cases necessitated approximately 320 h for completion, indicating a significantly longer duration due to their computational complexity.
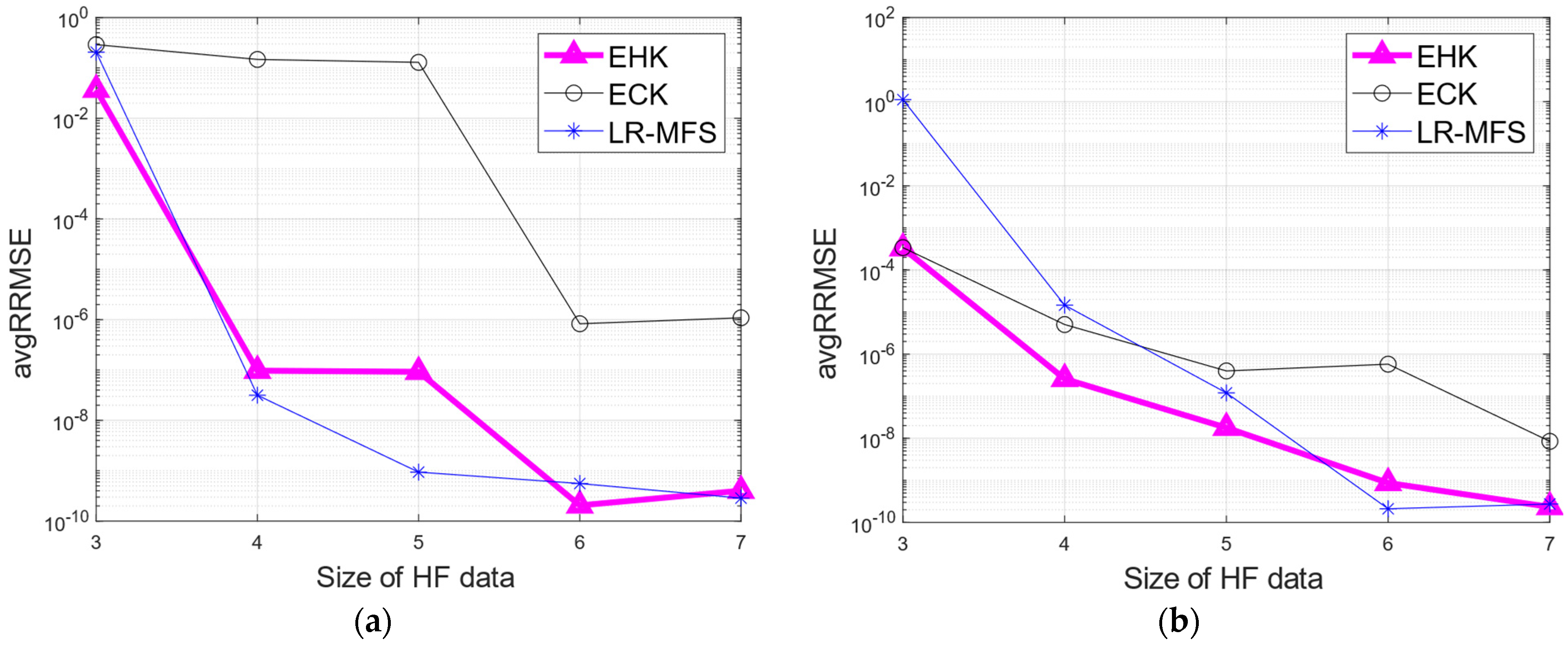
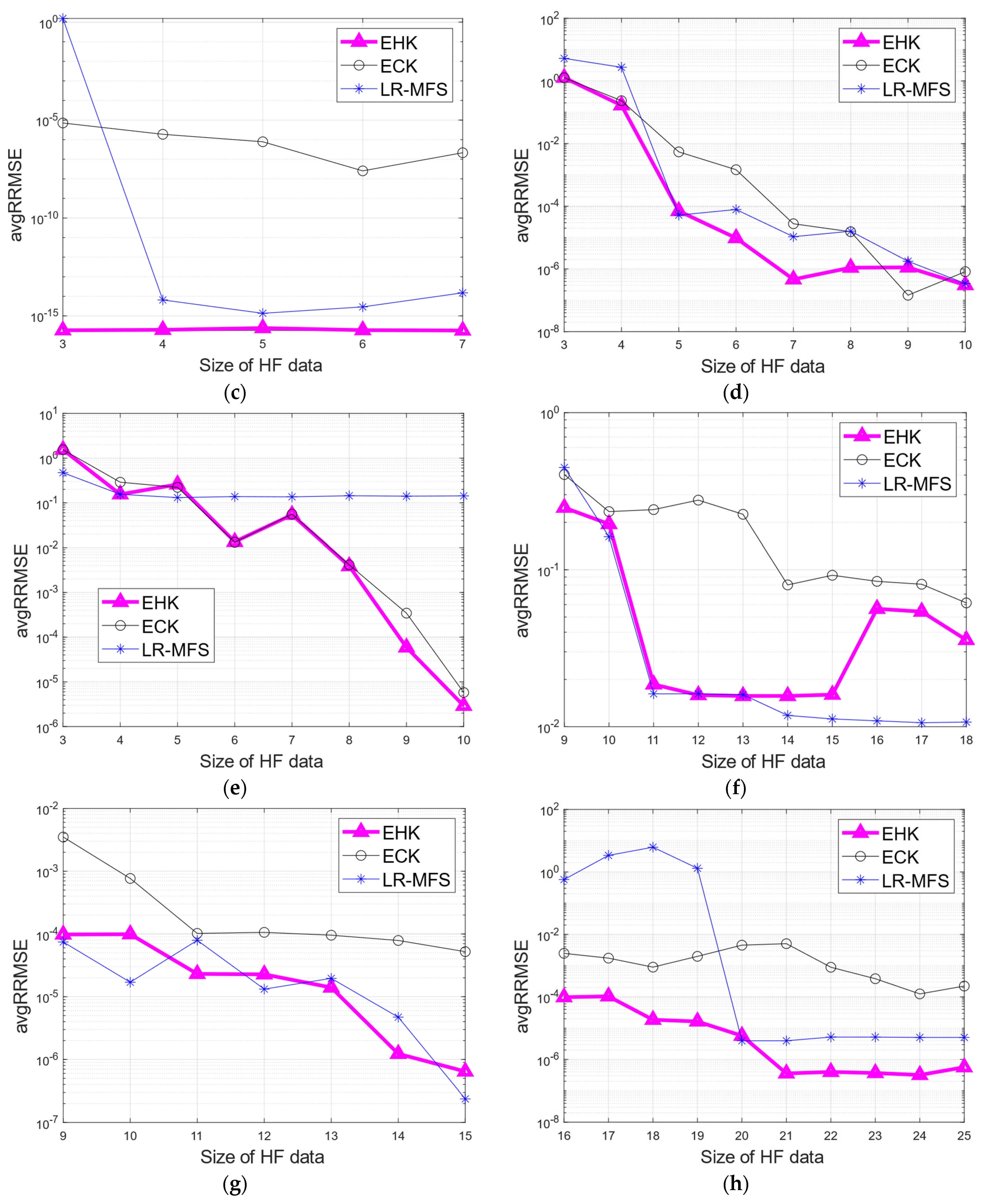
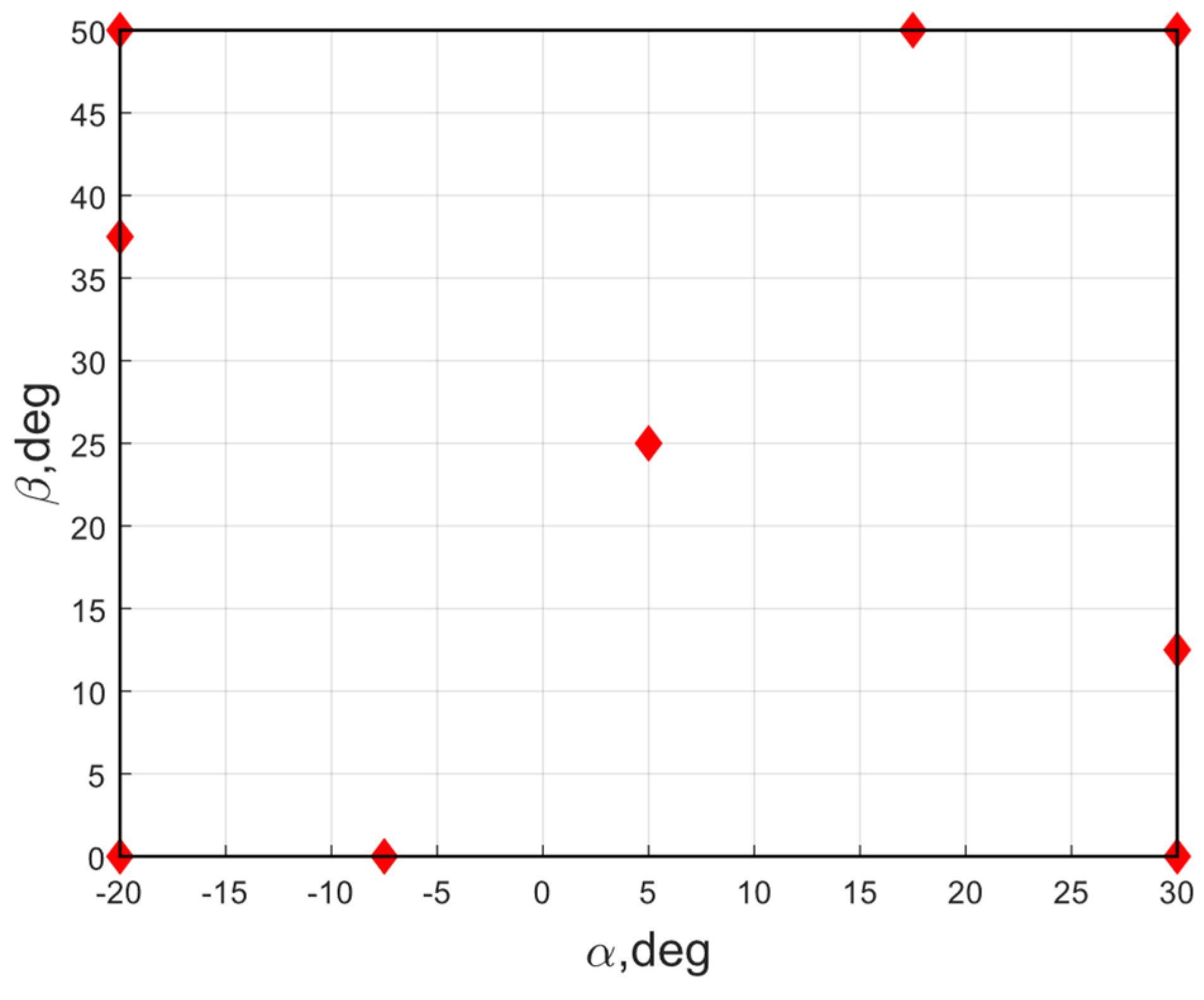
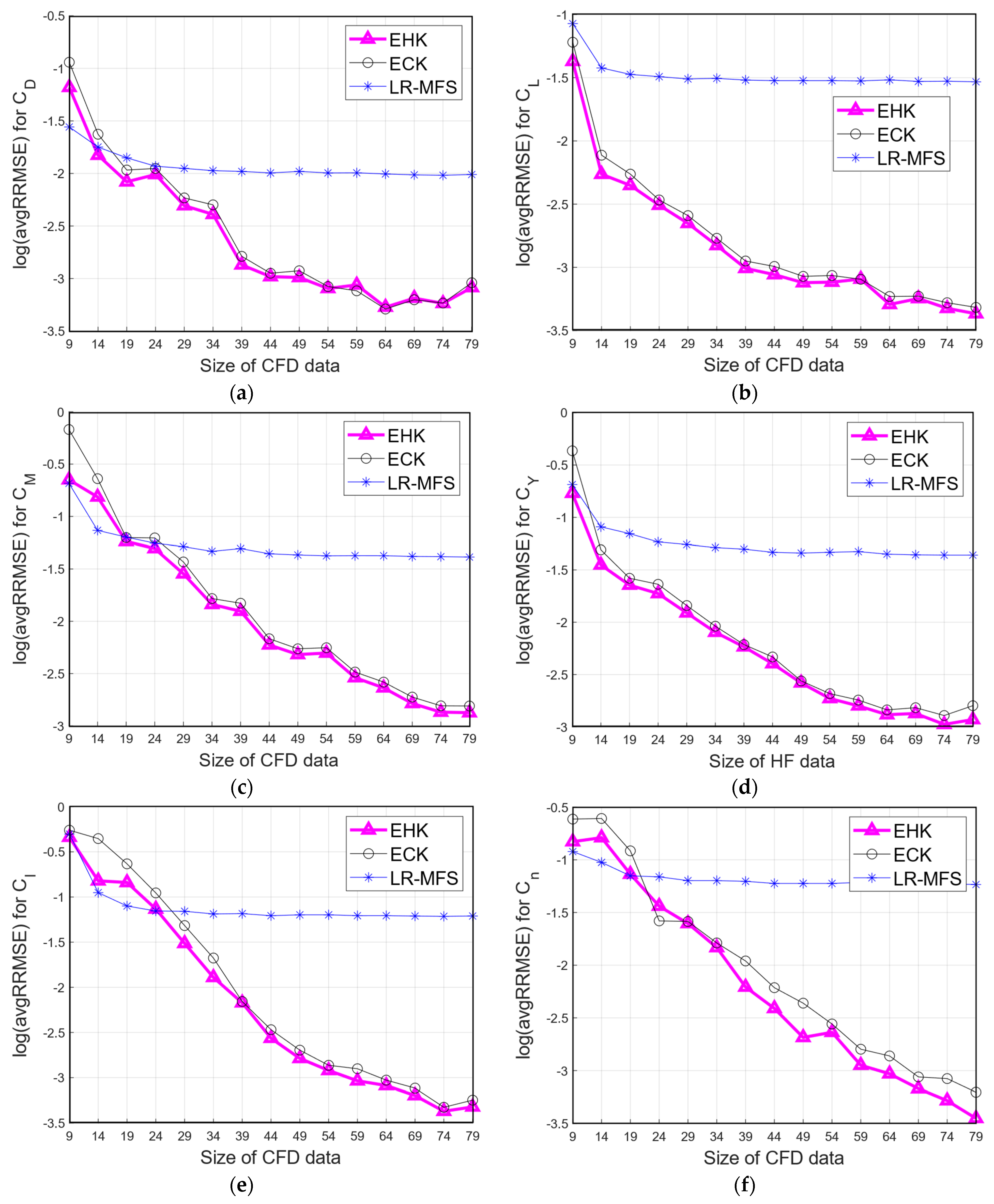
Figure 11 illustrates the initial sampling plan with 9 CFD points. Moreover, an additional 30 CFD points were randomly selected to validate the accuracy of the resulting models. An error comparison in terms of average RRMS between the EHK, ECK, and LRMFS models for aerodynamic coefficients regarding the number of CFD data points is shown in
Figure 12.
Generally, it is observed that the accuracy of the aerodynamic models by different methods was improved when the number of CFD points increased. The EHK models exhibited the best performances in approximating aerodynamic coefficients compared to the other models. The EHK and LRFMS models performed better than the ECK model when the number of CFD samples was less than 24 points. However, the LRMFS model’s accuracy was “saturated” after 24 CFD sample points. In contrast, the accuracy of the EHK and ECK models continued to be significantly improved when the number of CFD samples was higher than 24 points. With more than 24 CFD samples, the EHK model was slightly better than the ECK models in the approximations of . The EHK models significantly outperformed the ECK models for the approximations of and . Furthermore, the computational times recorded for the EHK, ECK, and LRMFS models across all testing cases were as follows: 15.388 s, 68.830 s, and 3.081 s, respectively.
Based on the previous investigations, it was consistently observed that the EHK model exhibited a lower computational cost during the model processing compared to the ECK model, primarily attributed to its reduced number of tuning hyperparameters. In the same training conditions, the EHK models achieved a remarkable reduction in computational time by 73% while maintaining higher levels of accuracy compared to the ECK models. The importance of this efficiency gain becomes even more apparent when considering the scalability and versatility of the EHK method. Whether applied on typical computer setups or extended to tackle more complex engineering tasks featuring voluminous datasets, high dimensionality, and the need for iterative model constructions, the EHK method’s efficiency and computational savings are undeniable.
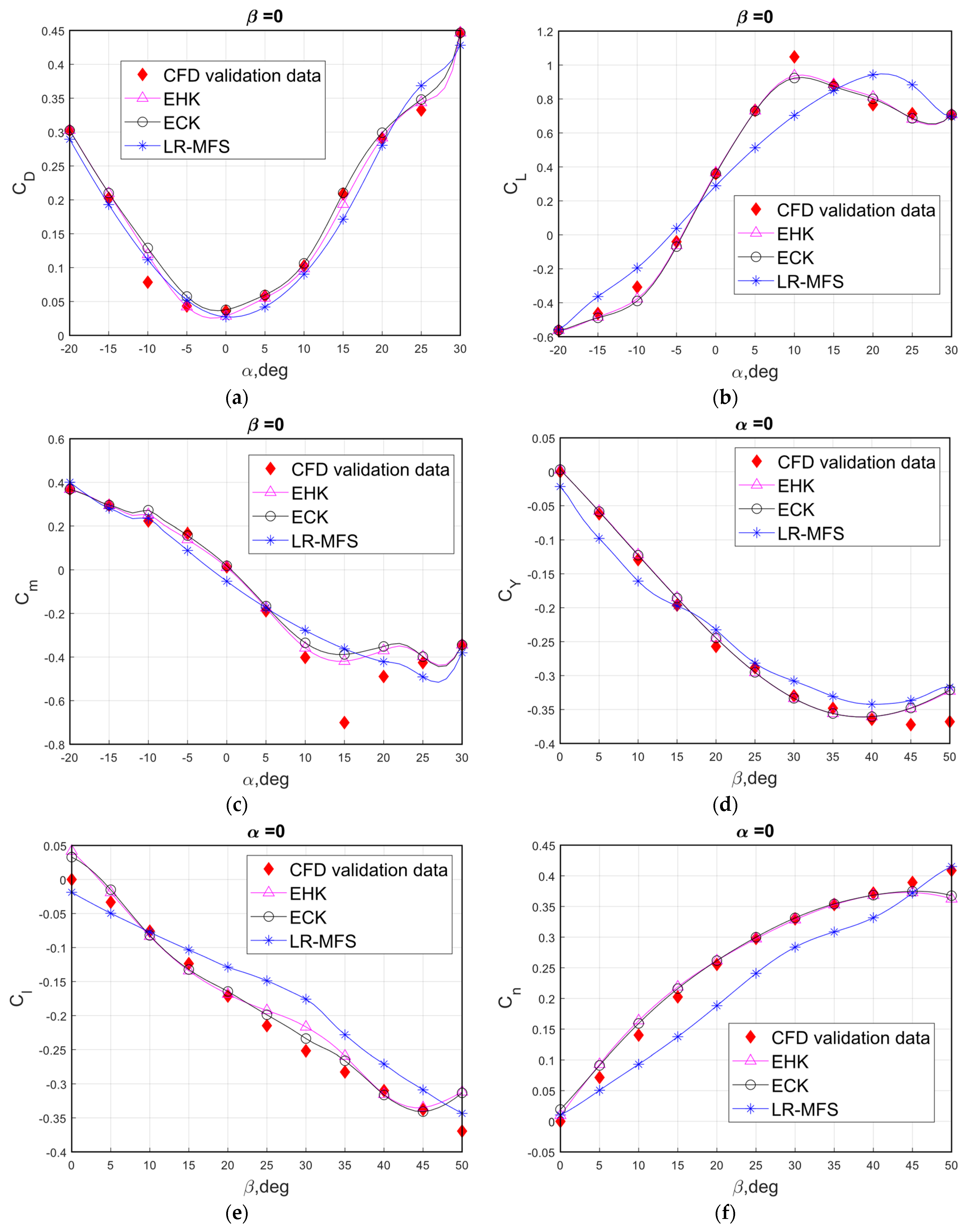
Figure 13 provides cross-sectional views of the resulting response surfaces for the lift, drag, and pitching moment coefficients at a constant sideslip angle of
. These surfaces were constructed using 24 CFD samples and 2600 LF samples. The accuracy comparison between the EHK model and other models was performed over ten repetitions, each involving 24 CFD samples. Evaluation metrics such as avgRRMSE and avgRMAE are presented in
Table 11. Remarkably, the LRMFS models achieved the lowest accuracy, despite their substantially lower computational costs in comparison to the other models. Furthermore, the EHK models demonstrated a slight edge in accuracy over the ECK model while maintaining a lower computational cost with an equal number of CFD training points.
In summary, the proposed EHK method stood out as an exceptionally efficient multi-level MFSM approach, outperforming other state-of-the-art methods, including the LRMFS and ECK models.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}