
Robust Trajectory Prediction Using Random Forest Methodology Application to UAS-S4 Ehécatl



Abstract
1. Introduction
- i.
- Initially, the trajectory prediction of the UAS-S4 was transformed into a problem of time-series regression.
- ii.
- Subsequently, an efficient Random Forest (RF) architecture was developed and tailored to fit the trajectory patterns of the UAS-S4.
- iii.
- Lastly, a method was designed for optimizing the hyperparameters and feature functions of the Random Forest.
2. Problem Statement
- i.
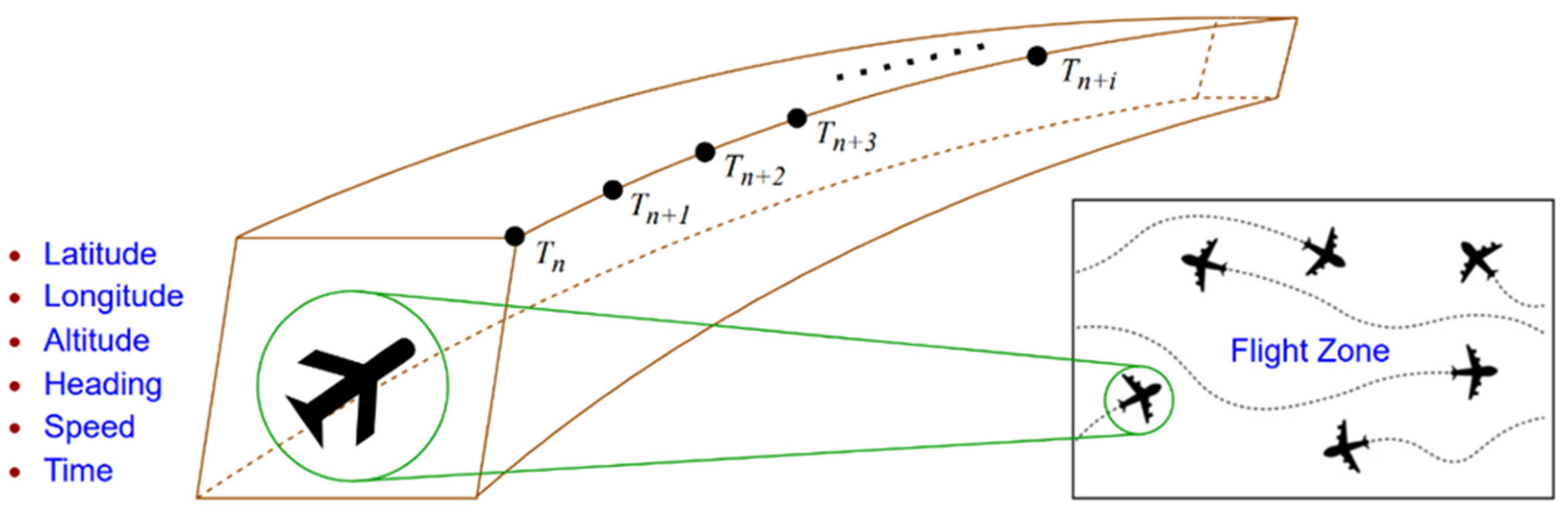
- Location coordinates, for which the GPS provided latitude, longitude, and altitude data.
- ii.
- Speed, derived from changes in position over time.
- iii.
- Heading, obtained from compass data indicating the direction in which the UAS-S4s were moving.
- iv.
- Time stamps, for which the time intervals between data points were considered for capturing the dynamics of movement.
- v.
- Derived features, including distance traveled over a period, average speed, and rate of turning, were engineered from raw sensor data.
3. Methodology
- Data Collection: The UASs’ time history flight trajectory data were generated and collected using the UAS-S4 simulator. These data included latitude, longitude, altitude, heading, speed, and time.
- Data Preprocessing: Firstly, data cleaning incorporated handling missing values, outliers, and noise. Secondly, features were engineered [42], and new features that may be relevant to the memory for the ATP were created. For instance, historical trajectory points can be used to create features including ‘previous_latitude’, ‘previous_longitude’, and ‘previous_altitude’.
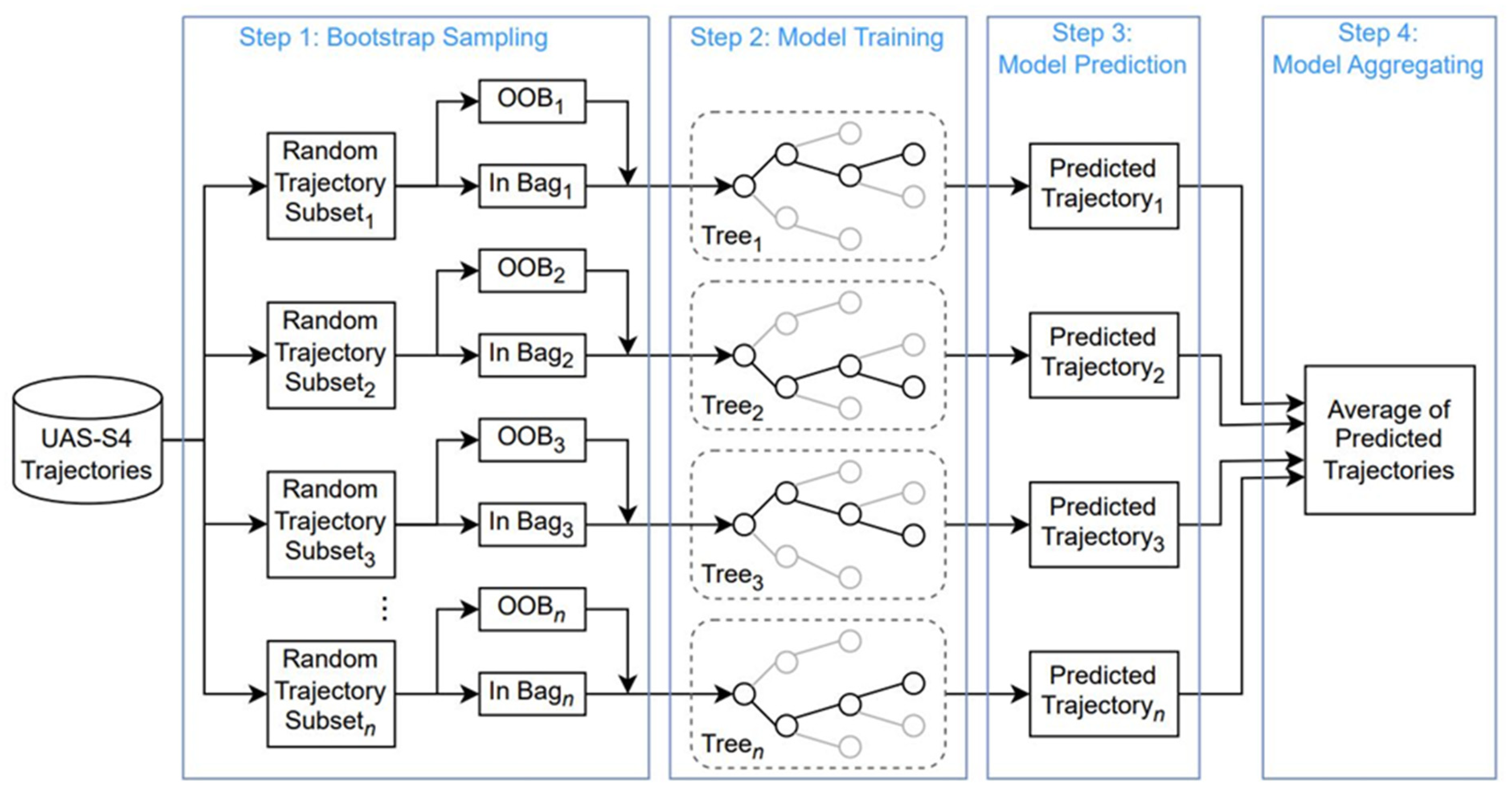
- Model Training: ‘RandomForestRegressor’ was imported from the ‘sklearn.ensemble’ library. The RF model was trained while the out-of-bag (OOB) error was enabled [43]. This error is the average squared difference for regression. The OOB error was monitored during training to provide a preliminary estimate of model performance, in which internal validation (the OOB samples acted as validation sets) and unbiased estimates (since the model was tested on samples it had not seen during training) are provided. Eventually, the RF model learns to make predictions based on the input features and their relationships to the target variable.
- Model Evaluation: After training the RF model, Mean Absolute Percentage Error (MAPE) and out-of-bag (OOB) error were considered as metrics for performance analysis.
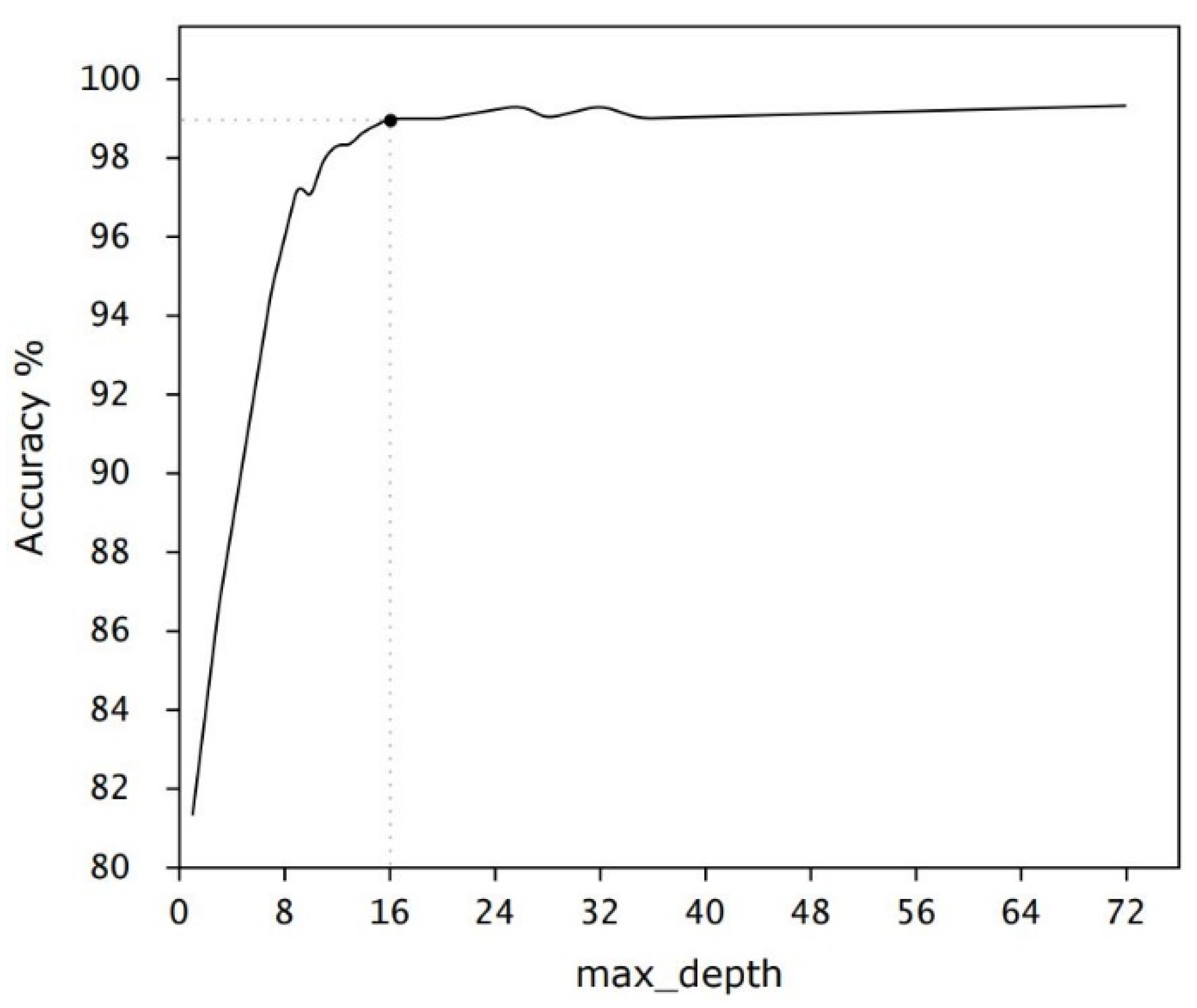
- Model Optimization: The effectiveness of the RF model for trajectory prediction depends on multiple factors, such as data quality and hyperparameter tuning. Fine-tuning of the RF model hyperparameter is necessary to achieve optimal performance. For hyperparameter tuning, parameters including ‘n_estimators’ [44], ‘max_depth’ [45], ‘min_samples_split’, and ‘min_samples_leaf’ [46] were adjusted using ‘GridSearchCV’ to improve performance.
- Real-time Prediction: This process consists of using the trained RF model to make new trajectory predictions. The relevant features are input for each trajectory, and the model outputs predicted future trajectories based on learned patterns. The RF model calculates the average of decisions (predictions made by trees) [47]. The additive model combines decisions from a series of base models using the relationship . Therefore, the final model g is the sum of base models . Figure 2 illustrates the architecture of the RF model with the aim of the UAS-S4 trajectory prediction.
4. Results and Discussion
- i.
- For each training instance (data point) that was not included in the bootstrap sample (i.e., left out of the bag) for a particular tree in the ensemble, its value was predicted using that tree.
- ii.
- After all trees are constructed, for each training instance, the average of the predictions made by the trees for which that instance was out-of-bag was calculated.
- iii.
- The OOB error is then the average of the squared differences between these averaged predictions and the actual values of the training instances. Mathematically, if is the actual value of the ith instance and is the averaged OOB prediction for that instance, then the OOB error is calculated as:where is the number of training instances.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| m | Total number of observations |
| y | Actual trajectory value |
| Predicted trajectory value | |
| The time during which the aircraft is at step n | |
| LR | Logistic Regression |
| LSTM | Long Short-Term Memory |
| MAPE | Mean Absolute Percentage Error |
| RF | Random Forest |
| UAS | Unmanned Aerial System |
References
- Ghommam, J.; Saad, M.; Mnif, F.; Zhu, Q.M. Guaranteed performance design for formation tracking and collision avoidance of multiple USVs with disturbances and unmodeled dynamics. IEEE Syst. J. 2020, 15, 4346–4357. [Google Scholar] [CrossRef]
- Ollero, A.; Maza, I. Multiple Heterogeneous Unmanned Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2007; Volume 37. [Google Scholar]
- Hashemi, S.M. Novel Trajectory Prediction and Flight Dynamics Modelling and Control Based on Robust Artificial Intelligence Algorithms for the UAS-S4; École de Technologie Supérieure: Montreal, QC, Canada, 2022. [Google Scholar]
- Hashemi, S.; Botez, R.M.; Ghazi, G. Comparison Study between PoW and PoS Blockchains for Unmanned Aircraft System Traffic Management. In Proceedings of the AIAA AVIATION 2023 Forum, San Diego, CA, USA, 12–16 June 2023. [Google Scholar]
- Ghazi, G.; Botez, R.M.; Domanti, S. New methodology for aircraft performance model identification for flight management system applications. J. Aerosp. Inf. Syst. 2020, 17, 294–310. [Google Scholar] [CrossRef]
- Cestino, D.; Crosasso, P.; Rapellino, M.; Cestino, E.; Frulla, G. Safety assessment of pharmaceutical distribution in a hospital environment. J. Healthc. Technol. Manag. 2013, 1, 10–21. [Google Scholar] [CrossRef]
- Izadi, H.; Gordon, B.; Zhang, Y. Safe path planning in the presence of large communication delays using tube model predictive control. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Toronto, ON, Canada, 2–5 August 2010. [Google Scholar]
- Zhou, X.; Yu, X.; Guo, K.; Zhou, S.; Guo, L.; Zhang, Y.; Peng, X. Safety flight control design of a quadrotor UAV with capability analysis. IEEE Trans. Cybern. 2021, 53, 1738–1751. [Google Scholar]
- Ghazi, G.; Botez, R.M. Identification and validation of an engine performance database model for the flight management system. J. Aerosp. Inf. Syst. 2019, 16, 307–326. [Google Scholar] [CrossRef]
- Ghommam, J.; Rahman, M.H.; Saad, M. Design of distributed event-triggered circumnavigation control of a moving target by a group of underactuated surface vessels. Eur. J. Control. 2022, 67, 100702. [Google Scholar] [CrossRef]
- Tuzcu, I.; Marzocca, P.; Cestino, E.; Romeo, G.; Frulla, G. Stability and control of a high-altitude, long-endurance UAV. J. Guid. Control Dyn. 2007, 30, 713–721. [Google Scholar] [CrossRef]
- Ghommam, J.; Saad, M.; Wright, S.; Zhu, Q.M. Relay manoeuvre based fixed-time synchronized tracking control for UAV transport system. Aerosp. Sci. Technol. 2020, 103, 105887. [Google Scholar] [CrossRef]
- Romeo, G.; Cestino, E.; Borello, F.; Pacino, M. Very-Long Endurance Solar Powered Autonomous UAVs: Role and Constraints for GMEs Applications. In Proceedings of the 28th International Congress of the Aeronautical Sciences–ICAS, Brisbane, Australia, 23–28 September 2012. [Google Scholar]
- Zhou, X.; Yu, X.; Zhang, Y.; Luo, Y.; Peng, X. Trajectory planning and tracking strategy applied to an unmanned ground vehicle in the presence of obstacles. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1575–1589. [Google Scholar] [CrossRef]
- Hashemi, S.M.; Hashemi, S.A.; Botez, R.M. Reliable Aircraft Trajectory Prediction Using Autoencoder Secured with P2P Blockchain. In International Symposium on Unmanned Systems and The Defense Industry; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Ghazi, G.; Gerardin, B.; Gelhaye, M.; Botez, R.M. New adaptive algorithm development for monitoring aircraft performance and improving flight management system predictions. J. Aerosp. Inf. Syst. 2020, 17, 97–112. [Google Scholar] [CrossRef]
- Di Gravio, G.; Mancini, M.; Patriarca, R.; Costantino, F. Overall safety performance of Air Traffic Management system: Forecasting and monitoring. Saf. Sci. 2015, 72, 351–362. [Google Scholar] [CrossRef]
- Mennequin, A.; Ghazi, G.; Botez, R.M. Cessna Citation X aircraft trajectory prediction using an aero-propulsive model. In Proceedings of the Poster Presented at the Conference: 6th Edition of the Montreal Innovation Summit (SMI), Montreal, QC, Canada, 24 November 2016. [Google Scholar]
- Prevost, C.G.; Desbiens, A.; Gagnon, E. Extended Kalman filter for state estimation and trajectory prediction of a moving object detected by an unmanned aerial vehicle. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar]
- Yang, X.; Sun, J.; Rajan, R.T. Aircraft Trajectory Prediction using ADS-B Data. In Proceedings of the Pre-Proceedings of the 2022 Symposium on Information Theory and Signal Processing in the Benelux, Louvain la Neuve, Belgium, 1–2 June 2022. [Google Scholar]
- Khedmati, M.; Seifi, F.; Azizi, M. Time series forecasting of bitcoin price based on autoregressive integrated moving average and machine learning approaches. Int. J. Eng. 2020, 33, 1293–1303. [Google Scholar]
- Xing, Y.; Wang, G.; Zhu, Y. Application of an autoregressive moving average approach in flight trajectory simulation. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar]
- Pang, Y.; Yao, H.; Hu, J.; Liu, Y. A recurrent neural network approach for aircraft trajectory prediction with weather features from sherlock. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar]
- Hashemi, S.M.; Hashemi, S.A.; Botez, R.M.; Ghazi, G. Aircraft Trajectory Prediction Enhanced through Resilient Generative Adversarial Networks Secured by Blockchain: Application to UAS-S4 Ehécatl. Appl. Sci. 2023, 13, 9503. [Google Scholar] [CrossRef]
- Hashemi, S.M.; Botez, R.M.; Grigorie, T.L. New reliability studies of data-driven aircraft trajectory prediction. Aerospace 2020, 7, 145. [Google Scholar] [CrossRef]
- Pang, Y.; Zhao, X.; Yan, H.; Liu, Y. Data-driven trajectory prediction with weather uncertainties: A Bayesian deep learning approach. Transp. Res. Part C Emerg. Technol. 2021, 130, 103326. [Google Scholar] [CrossRef]
- Hashemi, S.M.; Hashemi, S.A.; Botez, R.M.; Ghazi, G. A novel fault-tolerant air traffic management methodology using autoencoder and P2P blockchain consensus protocol. Aerospace 2023, 10, 357. [Google Scholar] [CrossRef]
- Wang, Z.; Liang, M.; Delahaye, D. Automated data-driven prediction on aircraft Estimated Time of Arrival. J. Air Transp. Manag. 2020, 88, 101840. [Google Scholar] [CrossRef]
- Sagi, O.; Rokach, L. Ensemble learning: A survey. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2018, 8, e1249. [Google Scholar] [CrossRef]
- Zhang, C.; Ma, Y. Ensemble Machine Learning: Methods and Applications; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Hashemi, S.; Hashemi, S.A.; Botez, R.M.; Ghazi, G. Attack-tolerant Trajectory Prediction using Generative Adversarial Network Secured by Blockchain Application to the UAS-S4 Ehécatl. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023. [Google Scholar]
- Hashemi, S.; Hashemi, S.A.; Botez, R.M.; Ghazi, G. A Novel Air Traffic Management and Control Methodology using Fault-Tolerant Autoencoder and P2P Blockchain Application on the UAS-S4 Ehécatl. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023. [Google Scholar]
- Kokalj-Filipovic, S.; Miller, R. Adversarial examples in RF deep learning: Detection of the attack and its physical robustness. arXiv 2019, arXiv:1902.06044. [Google Scholar]
- Guo, Z.; Yu, B.; Hao, M.; Wang, W.; Jiang, Y.; Zong, F. A novel hybrid method for flight departure delay prediction using Random Forest Regression and Maximal Information Coefficient. Aerosp. Sci. Technol. 2021, 116, 106822. [Google Scholar] [CrossRef]
- Heaton, J. An empirical analysis of feature engineering for predictive modeling. In Proceedings of the SoutheastCon 2016, Norfolk, VA, USA, 30 March–3 April 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Majda, A.J.; Harlim, J. Physics constrained nonlinear regression models for time series. Nonlinearity 2012, 26, 201. [Google Scholar] [CrossRef]
- Wang, H.; Yao, R.; Hou, L.; Zhao, J.; Zhao, X. A Methodology for Calculating the Contribution of Exogenous Variables to ARIMAX Predictions. In Proceedings of the Canadian Conference on AI, Vancouver, BC, USA, 25–28 May 2021. [Google Scholar]
- Subramanian, J.; Simon, R. Overfitting in prediction models–is it a problem only in high dimensions? Contemp. Clin. Trials 2013, 36, 636–641. [Google Scholar] [CrossRef] [PubMed]
- Kernbach, J.M.; Staartjes, V.E. Foundations of machine learning-based clinical prediction modeling: Part II—Generalization and overfitting. In Machine Learning in Clinical Neuroscience: Foundations and Applications; Springer: Berlin/Heidelberg, Germany, 2022; pp. 15–21. [Google Scholar]
- Cheng, J.C.; Chen, W.; Chen, K.; Wang, Q. Data-driven predictive maintenance planning framework for MEP components based on BIM and IoT using machine learning algorithms. Autom. Constr. 2020, 112, 103087. [Google Scholar] [CrossRef]
- Biau, G.; Scornet, E. A random forest guided tour. Test 2016, 25, 197–227. [Google Scholar] [CrossRef]
- Khurana, U.; Samulowitz, H.; Turaga, D. Feature engineering for predictive modeling using reinforcement learning. In Proceedings of the Proceedings of the AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018. [Google Scholar]
- Janitza, S.; Hornung, R. On the overestimation of random forest’s out-of-bag error. PLoS ONE 2018, 13, e0201904. [Google Scholar] [CrossRef]
- Probst, P.; Boulesteix, A.-L. To tune or not to tune the number of trees in random forest. J. Mach. Learn. Res. 2017, 18, 6673–6690. [Google Scholar]
- Nadi, A.; Moradi, H. Increasing the views and reducing the depth in random forest. Expert Syst. Appl. 2019, 138, 112801. [Google Scholar] [CrossRef]
- Lee, T.-H.; Ullah, A.; Wang, R. Bootstrap aggregating and random forest. In Macroeconomic Forecasting in the Era of Big Data: Theory and Practice; Springer: Berlin/Heidelberg, Germany, 2020; pp. 389–429. [Google Scholar]
- Gossen, F.; Steffen, B. Algebraic aggregation of random forests: Towards explainability and rapid evaluation. Int. J. Softw. Tools Technol. Transf. 2021, 25, 267–285. [Google Scholar] [CrossRef]
- Hashemi, S.; Botez, R.M. Lyapunov-based robust adaptive configuration of the UAS-S4 flight dynamics fuzzy controller. Aeronaut. J. 2022, 126, 1187–1209. [Google Scholar] [CrossRef]
- Hashemi, S.M.; Botez, R.M. A Novel Flight Dynamics Modeling Using Robust Support Vector Regression against Adversarial Attacks. SAE Int. J. Aerosp. 2023, 16, 305–323. [Google Scholar] [CrossRef]
- Hashemi, S.M.; Botez, R.M. Support vector regression application for the flight dynamics new modelling of the UAS-S4. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022. [Google Scholar]
- De Myttenaere, A.; Golden, B.; Le Grand, B.; Rossi, F. Mean absolute percentage error for regression models. Neurocomputing 2016, 192, 38–48. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| Wingspan | 4.2 m |
| Wing area | 2.3 m2 |
| Total length | 2.5 m |
| Mean aerodynamic chord | 0.57 m |
| Empty weight | 50 kg |
| Maximum take-off weight | 80 kg |
| Loitering airspeed | 35 knots |
| Maximum speed | 135 knots |
| Service ceiling | 15,000 ft |
| Operational range | 120 km |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hashemi, S.M.; Botez, R.M.; Ghazi, G. Robust Trajectory Prediction Using Random Forest Methodology Application to UAS-S4 Ehécatl. Aerospace 2024, 11, 49. https://doi.org/10.3390/aerospace11010049
Hashemi SM, Botez RM, Ghazi G. Robust Trajectory Prediction Using Random Forest Methodology Application to UAS-S4 Ehécatl. Aerospace. 2024; 11(1):49. https://doi.org/10.3390/aerospace11010049
Chicago/Turabian StyleHashemi, Seyed Mohammad, Ruxandra Mihaela Botez, and Georges Ghazi. 2024. "Robust Trajectory Prediction Using Random Forest Methodology Application to UAS-S4 Ehécatl" Aerospace 11, no. 1: 49. https://doi.org/10.3390/aerospace11010049
APA StyleHashemi, S. M., Botez, R. M., & Ghazi, G. (2024). Robust Trajectory Prediction Using Random Forest Methodology Application to UAS-S4 Ehécatl. Aerospace, 11(1), 49. https://doi.org/10.3390/aerospace11010049