
Multi-Objective Bayesian Optimization Design of Elliptical Double Serpentine Nozzle


Abstract
:1. Introduction
2. Model
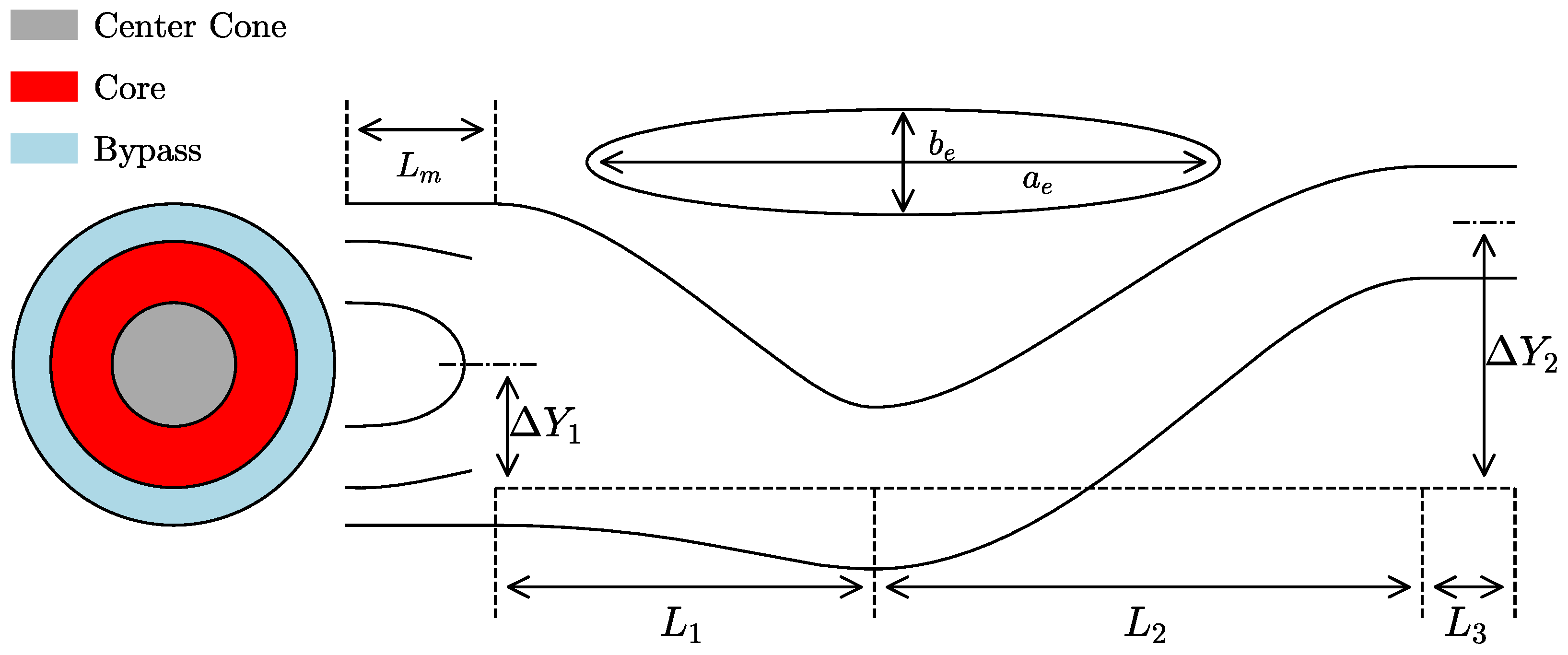
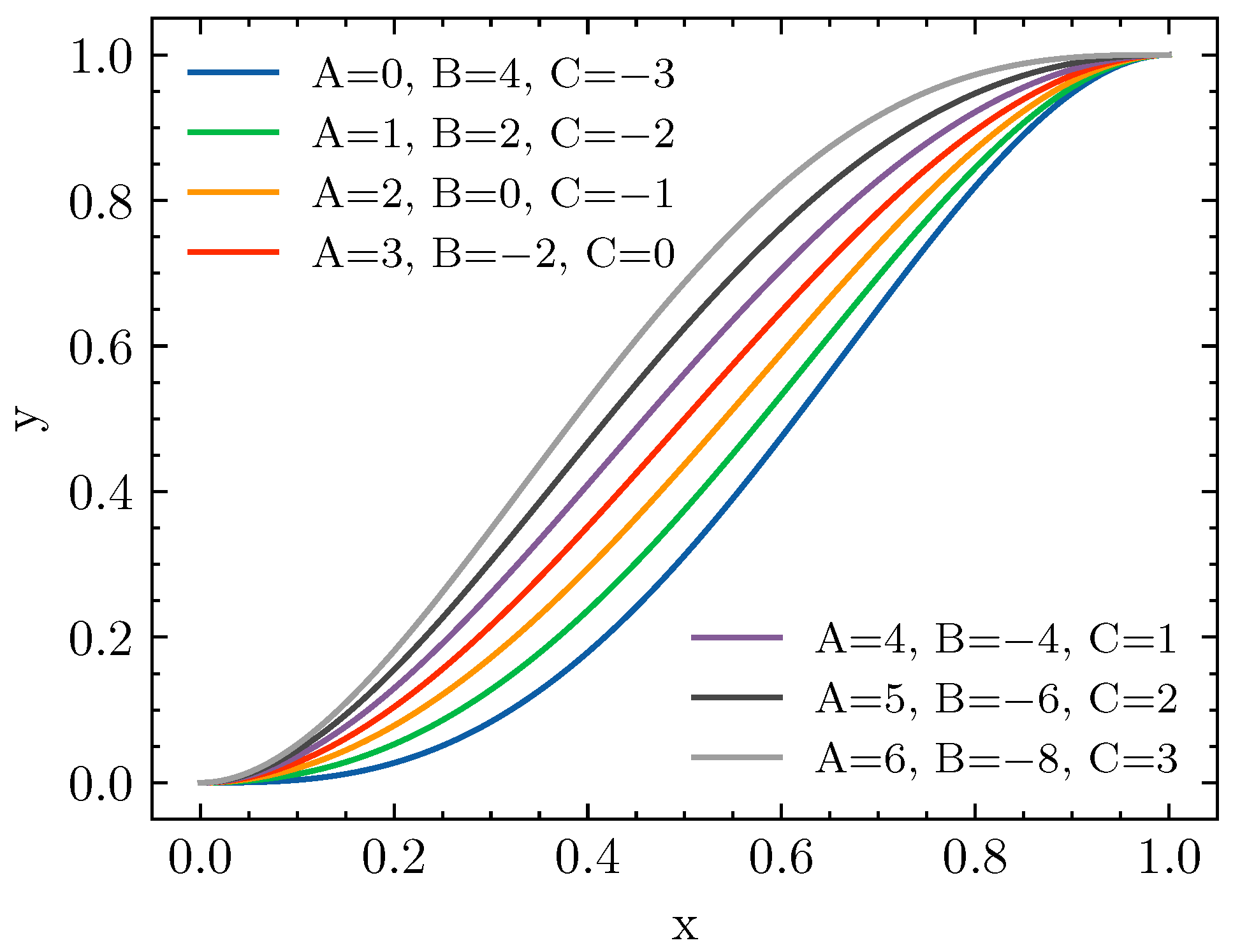
2.1. Nozzle Design Methodology
Parametrization of Elliptical Serpentine Nozzle
2.2. CFD Method
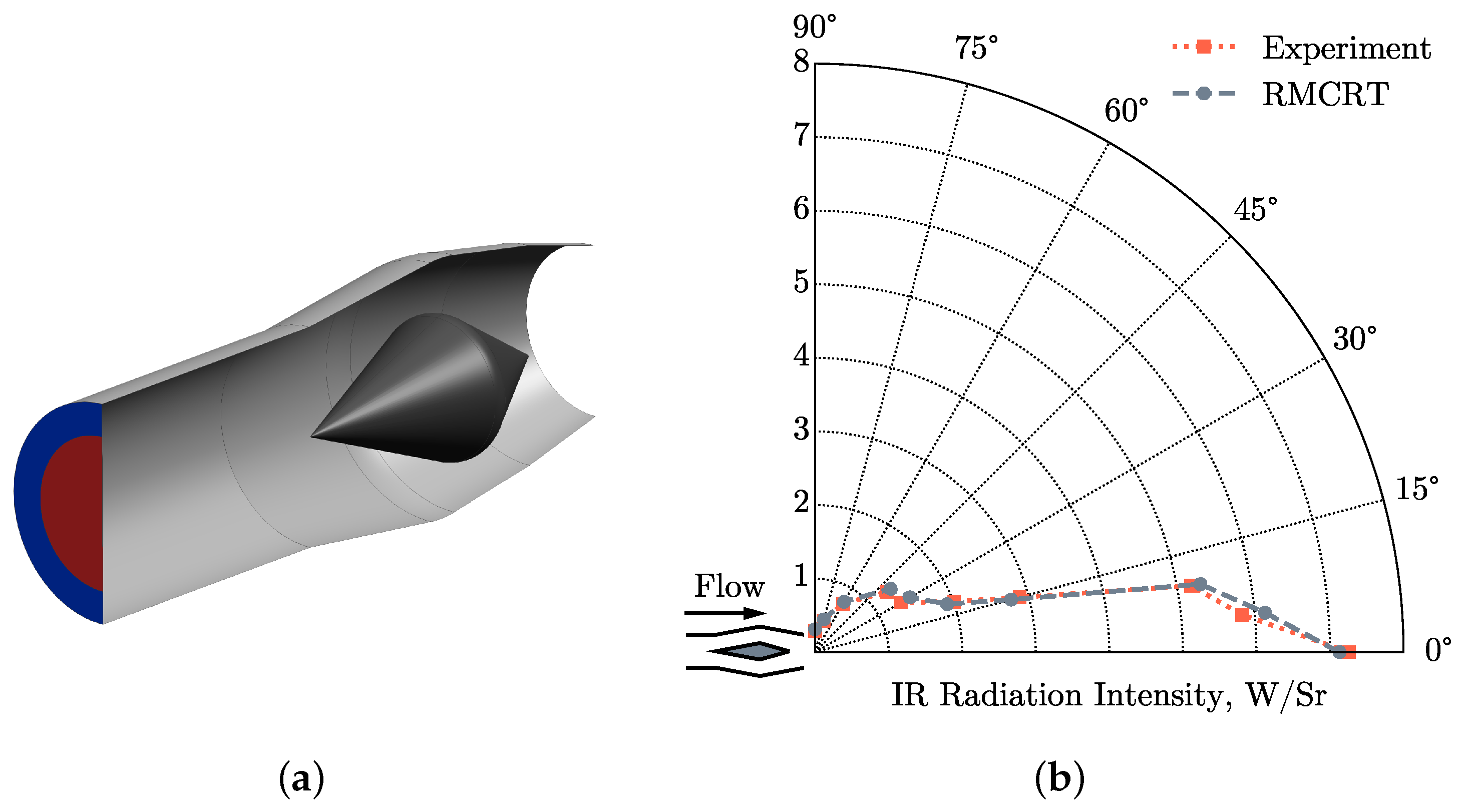
2.3. IR Radiation Calculation
3. Optimization Method and Process
3.1. Background on Multi-Objective Optimization
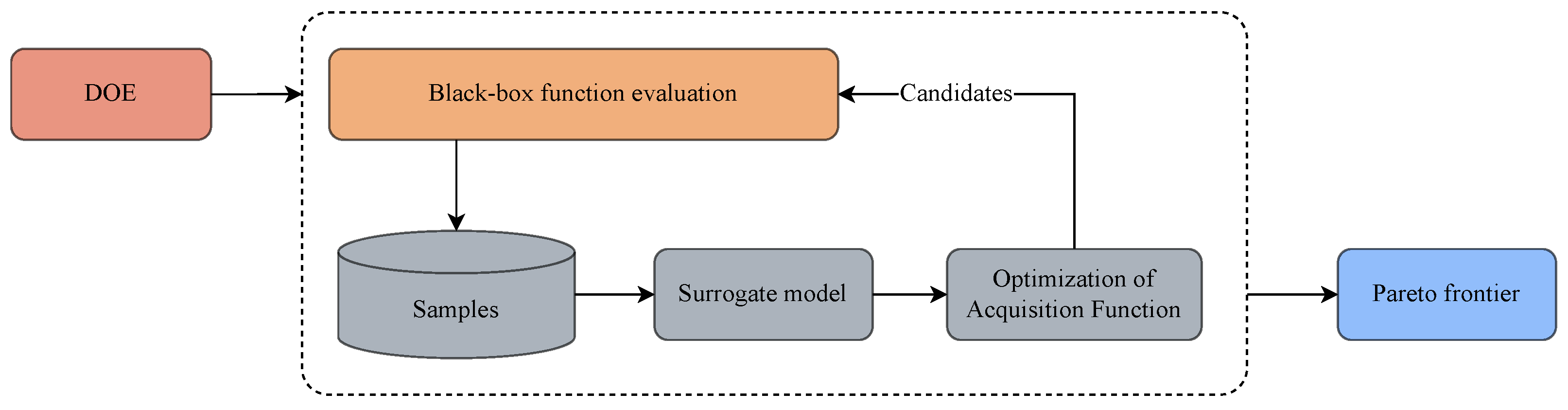
3.2. General Framework of Bayesian Optimization
3.3. Expected Hyper-Volume Improvement
3.4. Formalizing the Problem
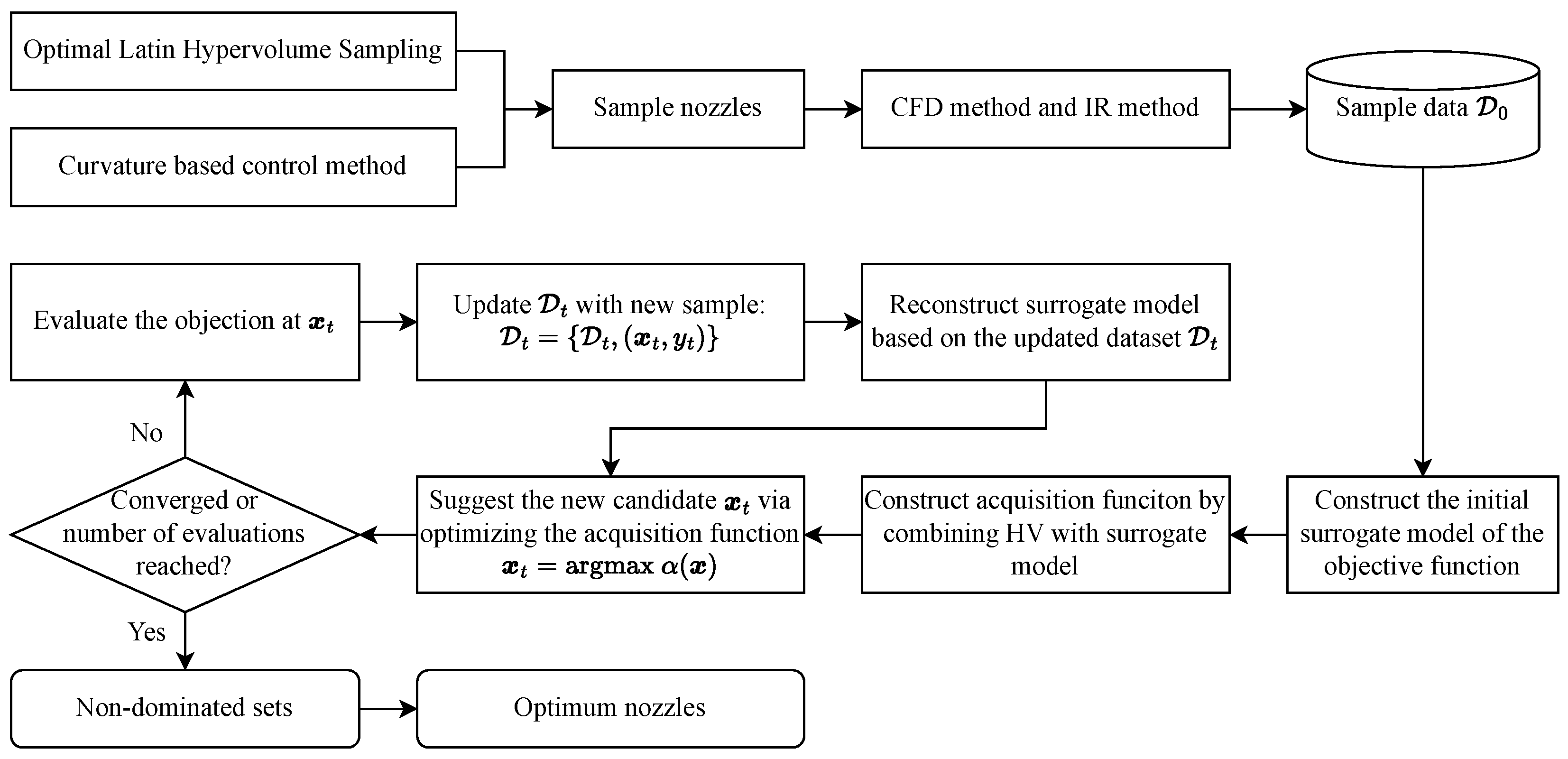
3.5. Optimization Procedure
4. Results and Discussion
4.1. Optimization Details
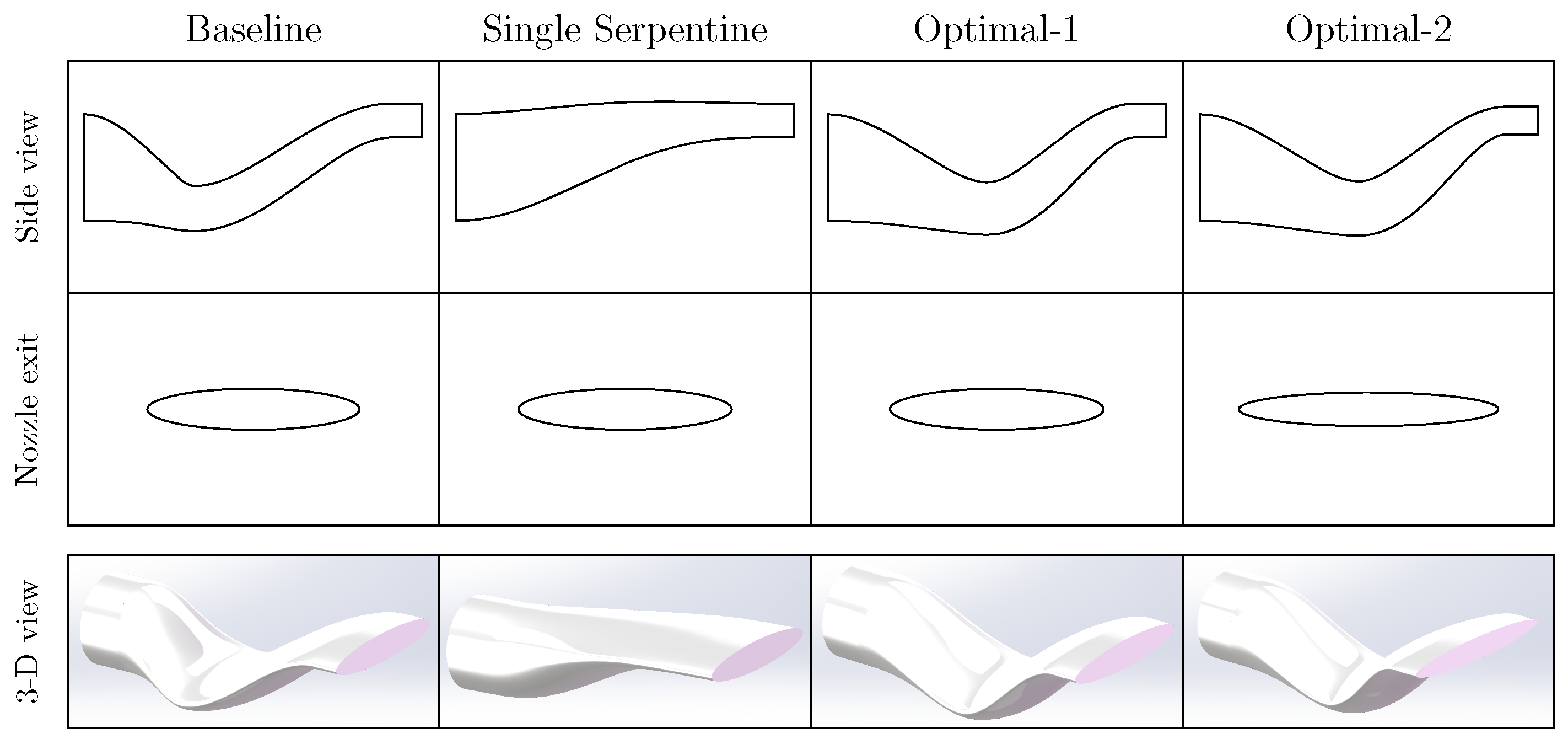
4.2. Comparison of Baseline and Optimal Nozzles
5. Conclusions
- The length of the first bend and the aspect ratio of the elliptical double serpentine nozzle have an important influence on the performance of the nozzle. Notably, the Optimal-1 model demonstrated enhanced infrared radiation and aerodynamic performance following the optimization, with a decrease in infrared radiation intensity and a improvement in the thrust coefficient.
- The Optimal-2 model, with a larger aspect ratio, showed an impressive improvement in the infrared radiation performance, demonstrated by an reduction in infrared radiation intensity. However, the larger transition from circular inlet to elliptical exit also deteriorated the flow field of the Optimal-2 model, while the thrust coefficient decreased by .
- The optimization framework introduced in this paper effectively tackles the complex multi-objective optimization problems of the elliptical double serpentine nozzle. This framework not only provides reliable technical guidance for future research, but is also a promising approach to complex and costly optimization challenges in aircraft design, including the improvement of aerodynamic, radar, and infrared stealth capabilities.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviations | |
| AR | Aspect Ratio. |
| BO | Bayesian Optimization. |
| CFD | Computational Fluid Dynamic. |
| DOE | Design of Experiment. |
| DTM | Discrete Transfer Method. |
| EA | Evolutionary Algorithms. |
| EHVI | Expected Hypervolume Improvement. |
| EI | Expected Improvement. |
| HV | Hypervolume. |
| IR | Infra-Red. |
| LBL | Line by Line. |
| LHS | Latin Hypercube Sampling. |
| LOOCV | Leave One Out Cross Validation. |
| LWIR | Long Wavelength Infrared. |
| MOBO | Multi-Objective Bayesian Optimization. |
| MWIR | Middle Wavelength Infrared. |
| NSGA | Non-dominated Sorting Genetic Algorithm. |
| OLH | Optimal Latin Hypercube. |
| RMCRT | Reversed Monte Carlo Ray Tracing. |
| PF | Pareto Frontier. |
| SNB | Statistic Narrow Band. |
| UCAV | Unmanned Combat Aerial Vehicle. |
| Others | |
| Approximated Pareto front. | |
| Back pressure. | |
| m | Dimension of an objective space. |
| I | Infrared intensity. |
| Mass flow rate of nozzle. | |
| Mean value of predictive distribution. | |
| Pitch detection angle. | |
| Standard deviation of predictive distribution. | |
| Thrust coefficient of nozzle. | |
| Wavelength. | |
| Yaw detection angle. |
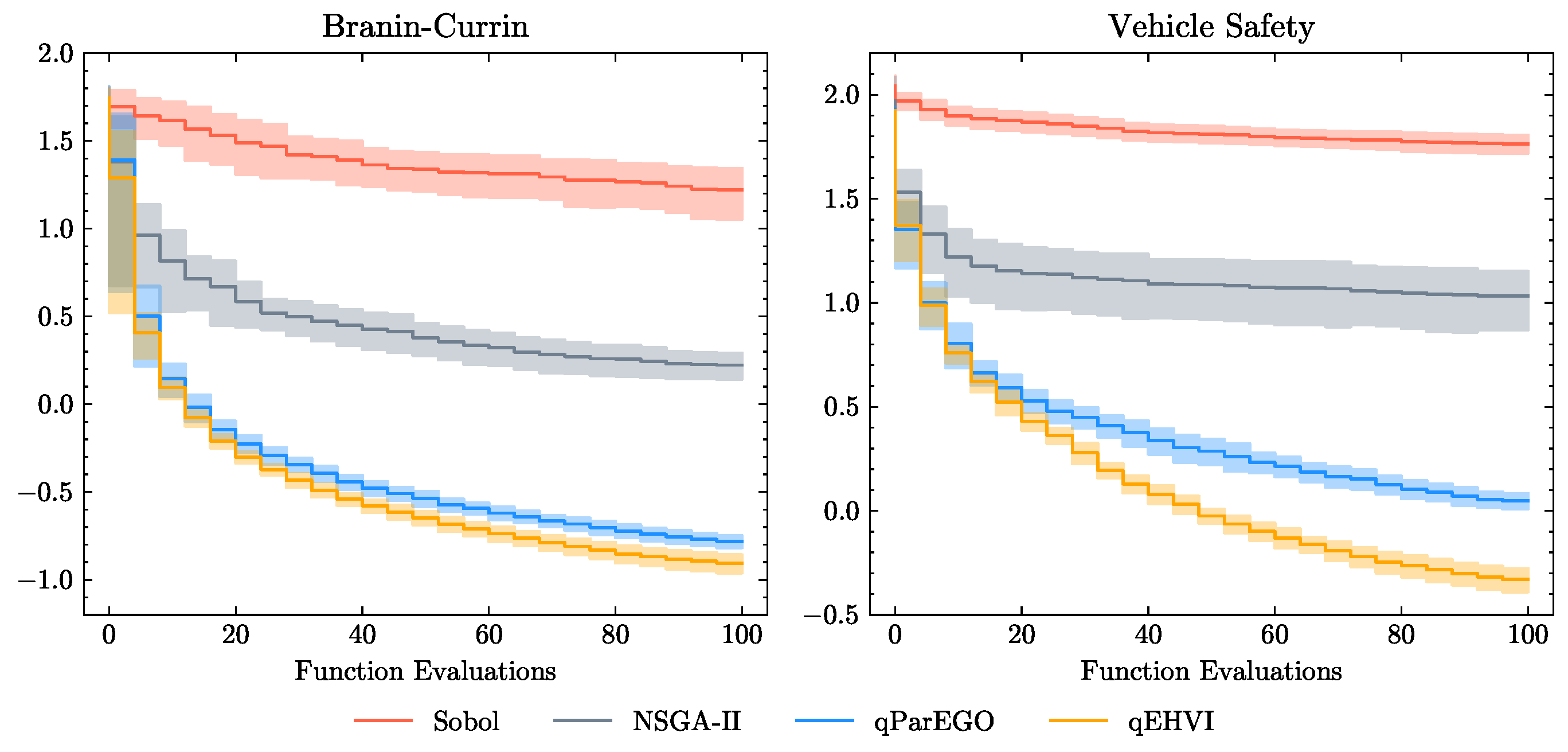
Appendix A. Benchmark Problems
Appendix A.1. Branin–Currin Function
Appendix A.2. Vehicle Safety Function
References
- Cheng, W.; Wang, Z.; Zhou, L.; Sun, X.; Shi, J. Influences of shield ratio on the infrared signature of serpentine nozzle. Aerosp. Sci. Technol. 2017, 71, 299–311. [Google Scholar] [CrossRef]
- Nangia, R.; Ghoreyshi, M.; van Rooij, M.P.; Cummings, R.M. Aerodynamic design assessment and comparisons of the MULDICON UCAV concept. Aerosp. Sci. Technol. 2019, 93, 105321. [Google Scholar] [CrossRef]
- Li, M.; Bai, J.; Li, L.; Meng, X.; Liu, Q.; Chen, B. A gradient-based aero-stealth optimization design method for flying wing aircraft. Aerosp. Sci. Technol. 2019, 92, 156–169. [Google Scholar] [CrossRef]
- Wang, B.; Cong, W.; Wang, C.; Yang, Y.; Huang, J. Infrared radiation characteristics calculation and infrared stealth effect analysis of stealth fighter. Trans. Beijing Inst. Technol. 2019, 39, 365–371. [Google Scholar]
- Rao, A.N.; Kushari, A.; Jaiswal, G.K. Effect of nozzle geometry on flowfield for high subsonic jets. J. Propuls. Power 2018, 34, 1596–1608. [Google Scholar] [CrossRef]
- Feng, N. Development and application of stealth technique. Int. Technol. 2012, 119, 86–102. [Google Scholar]
- Born, G.A.; Roberts, T.A.; Boor, P.M. Infrared Suppression Exhaust Duct System for a Turboprop Propulsion System for an Aircraft. U.S. Patent 5,699,662, 23 December 1997. [Google Scholar]
- Johansson, M. FOT25 2003–2005 Propulsion Integration Final Report; Report No. FOI; Swedish Defence Research Agency (FOI): Stockholm, Sweden, 2006.
- Ho, C.M.; Gutmark, E. Vortex induction and mass entrainment in a small-aspect-ratio elliptic jet. J. Fluid Mech. 1987, 179, 383–405. [Google Scholar] [CrossRef]
- Miller, R.; Madnia, C.; Givi, P. Numerical simulation of non-circular jets. Comput. Fluids 1995, 24, 1–25. [Google Scholar] [CrossRef]
- Baranwal, N.; Mahulikar, S.P. Review of Infrared signature suppression systems using optical blocking method. Def. Technol. 2019, 15, 432–439. [Google Scholar] [CrossRef]
- Liu, C.; Ji, H.; Huang, W.; Yang, F. Numerical simulation on infrared radiation characteristics of serpentine 2-D nozzle. J. Aerosp. Power 2013, 28, 1482–1488. [Google Scholar]
- An, C.; Kang, D.; Baek, S.; Myong, R.; Kim, W.; Choi, S. Analysis of plume infrared signatures of S-shaped nozzle configurations of aerial vehicle. J. Aircr. 2016, 53, 1768–1778. [Google Scholar] [CrossRef]
- Rajkumar, P.; Chandra Sekar, T.; Kushari, A.; Mody, B.; Uthup, B. Flow characterization for a shallow single serpentine nozzle with aft deck. J. Propuls. Power 2017, 33, 1130–1139. [Google Scholar] [CrossRef]
- Crowe, D.S.; Martin, C.L. Effect of geometry on exit temperature from serpentine exhaust nozzles. In Proceedings of the 53rd AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 5–9 January 2015; p. 1670. [Google Scholar]
- Crowe, D.S.; Martin, C.L. Hot streak characterization in serpentine exhaust nozzles. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UT, USA, 25–27 July 2016; p. 4502. [Google Scholar]
- Crowe, D.S.; Martin, C.L., Jr. Hot streak characterization of high-performance double-serpentine exhaust nozzles at design conditions. J. Propuls. Power 2019, 35, 501–511. [Google Scholar] [CrossRef]
- Cheng, W.; Wang, Z.; Zhou, L.; Shi, J.; Sun, X. Infrared signature of serpentine nozzle with engine swirl. Aerosp. Sci. Technol. 2019, 86, 794–804. [Google Scholar] [CrossRef]
- Singh, L.; Singh, S.; Sinha, S. Effect of Reynolds number and slot guidance on passive infrared suppression device. Aerosp. Sci. Technol. 2020, 99, 105732. [Google Scholar] [CrossRef]
- Liu, J.; Yue, H.; Lin, J.; Zhang, Y. A simulation method of aircraft infrared signature measurement with subscale models. Procedia Comput. Sci. 2019, 147, 2–16. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Coello, C.C.; Lechuga, M.S. MOPSO: A proposal for multiple objective particle swarm optimization. In Proceedings of the 2002 Congress on Evolutionary Computation. CEC’02 (Cat. No. 02TH8600), Honolulu, HI, USA, 12–17 May 2002; Volume 2, pp. 1051–1056. [Google Scholar]
- Lee, C.; Boedicker, C. Subsonic diffuser design and performance for advanced fighter aircraft. In Proceedings of the Aircraft Design Systems and Operations Meeting, Colorado Springs, CO, USA, 14–16 October 1985; p. 3073. [Google Scholar]
- Sun, X.; Smith, P.J. A Parametric Case Study in Radiative Heat Transfer Using the Reverse Monte-Carlo Ray-Tracing with Full-Spectrum k-Distribution Method. J. Heat Transf. 2009, 132, 024501. [Google Scholar] [CrossRef]
- Lockwood, F.; Shah, N. A new radiation solution method for incorporation in general combustion prediction procedures. Symp. Int. Combust. 1981, 18, 1405–1414. [Google Scholar] [CrossRef]
- Versteeg, H.K.; Henson, J.C.; Malalasekera, W. Spatial discretization errors in the heat flux integral of the discrete transfer method. Numer. Heat Transf. Part B Fundam. 2000, 38, 333–352. [Google Scholar]
- Schenker, G.N.; Keller, B. Line-by-line calculations of the absorption of infrared radiation by water vapor in a box-shaped enclosure filled with humid air. Int. J. Heat Mass Transf. 1995, 38, 3127–3134. [Google Scholar] [CrossRef]
- Malkmus, W. Random Lorentz Band Model with Exponential-Tailed S—1 Line-Intensity Distribution Function. J. Opt. Soc. Am. 1967, 57, 323–329. [Google Scholar] [CrossRef]
- Young, S.J. Nonisothermal band model theory. J. Quant. Spectrosc. Radiat. Transf. 1977, 18, 1–28. [Google Scholar] [CrossRef]
- Zheng, S.; Yang, Y.; Zhou, H. The effect of different HITRAN databases on the accuracy of the SNB and SNBCK calculations. Int. J. Heat Mass Transf. 2019, 129, 1232–1241. [Google Scholar] [CrossRef]
- Luo, M. Investigation of Infrared Stealth Technology of the Exhaust System for Unmanned Aerial Vehicle. Ph.D. Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2006. [Google Scholar]
- Shahriari, B.; Swersky, K.; Wang, Z.; Adams, R.P.; de Freitas, N. Taking the Human Out of the Loop: A Review of Bayesian Optimization. Proc. IEEE 2016, 104, 148–175. [Google Scholar] [CrossRef]
- Seeger, M. Gaussian processes for machine learning. Int. J. Neural Syst. 2004, 14, 69–106. [Google Scholar] [CrossRef] [PubMed]
- Fernández-Sánchez, D.; Garrido-Merchán, E.C.; Hernández-Lobato, D. Improved max-value entropy search for multi-objective bayesian optimization with constraints. Neurocomputing 2023, 546, 126290. [Google Scholar] [CrossRef]
- Keane, A.J. Statistical improvement criteria for use in multiobjective design optimization. AIAA J. 2006, 44, 879–891. [Google Scholar] [CrossRef]
- Emmerich, M.T.; Giannakoglou, K.C.; Naujoks, B. Single-and multiobjective evolutionary optimization assisted by Gaussian random field metamodels. IEEE Trans. Evol. Comput. 2006, 10, 421–439. [Google Scholar] [CrossRef]
- Knowles, J. ParEGO: A hybrid algorithm with on-line landscape approximation for expensive multiobjective optimization problems. IEEE Trans. Evol. Comput. 2006, 10, 50–66. [Google Scholar] [CrossRef]
- Namura, N.; Shimoyama, K.; Obayashi, S. Expected improvement of penalty-based boundary intersection for expensive multiobjective optimization. IEEE Trans. Evol. Comput. 2017, 21, 898–913. [Google Scholar] [CrossRef]
- Zuhal, L.R.; Palar, P.S.; Shimoyama, K. A comparative study of multi-objective expected improvement for aerodynamic design. Aerosp. Sci. Technol. 2019, 91, 548–560. [Google Scholar] [CrossRef]
- Yang, K.; Emmerich, M.; Deutz, A.; Bäck, T. Efficient computation of expected hypervolume improvement using box decomposition algorithms. J. Glob. Optim. 2019, 75, 3–34. [Google Scholar] [CrossRef]
- Yang, K.; Emmerich, M.; Deutz, A.; Bäck, T. Multi-objective Bayesian global optimization using expected hypervolume improvement gradient. Swarm Evol. Comput. 2019, 44, 945–956. [Google Scholar] [CrossRef]
- Belakaria, S.; Deshwal, A.; Doppa, J.R. Max-value entropy search for multi-objective Bayesian optimization. Adv. Neural Inf. Process. Syst. 2019, 32. [Google Scholar]
- Tanabe, R.; Ishibuchi, H. An easy-to-use real-world multi-objective optimization problem suite. Appl. Soft Comput. 2020, 89, 106078. [Google Scholar] [CrossRef]
- Balandat, M.; Karrer, B.; Jiang, D.; Daulton, S.; Letham, B.; Wilson, A.G.; Bakshy, E. BoTorch: A framework for efficient Monte-Carlo Bayesian optimization. Adv. Neural Inf. Process. Syst. 2020, 33, 21524–21538. [Google Scholar]
- Blank, J.; Deb, K. pymoo: Multi-Objective Optimization in Python. IEEE Access 2020, 8, 89497–89509. [Google Scholar] [CrossRef]
- Liu, H.; Ong, Y.S.; Cai, J. A survey of adaptive sampling for global metamodeling in support of simulation-based complex engineering design. Struct. Multidiscip. Optim. 2018, 57, 393–416. [Google Scholar] [CrossRef]
- Viana, F.A. Things you wanted to know about the Latin hypercube design and were afraid to ask. In Proceedings of the 10th World Congress on Structural and Multidisciplinary Optimization, Orlando, FL, USA, 19–24 May 2013; Volume 19. [Google Scholar]
- Joseph, V.R. Space-filling designs for computer experiments: A review. Qual. Eng. 2016, 28, 28–35. [Google Scholar] [CrossRef]
- Santner, T.J.; Williams, B.J.; Notz, W.I.; Santner, T.J.; Williams, B.J.; Notz, W.I. Space-filling designs for computer experiments. In The Design and Analysis of Computer Experiments; STAT Center of Excellence: Dayton, OH, USA, 2018; pp. 145–200. [Google Scholar]
- Drezek, P.S.; Kubacki, S.; Zoltak, J. Kriging-Based Framework Applied to a Multi-Point, Multi-Objective Engine Air-Intake Duct Aerodynamic Optimization Problem. Aerospace 2023, 10, 266. [Google Scholar] [CrossRef]
- Jones, D.R.; Schonlau, M.; Welch, W.J. Efficient global optimization of expensive black-box functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Value | |
|---|---|---|
| Nozzle inlet | Area of nozzle inlet | |
| Area of bypass duct, | ||
| Area of core duct, | ||
| Nozzle exit | Area of nozzle exit, | |
| Aspect ratio, | variable | |
| Nozzle length | Diameter of nozzle inlet | D |
| Length of mixer, | ||
| Length of first bend section, | variable | |
| Length of second bend section, | variable | |
| Length of straight section, | ||
| Length of nozzle, | ||
| Nozzle offset | Offset, | |
| Offset of first bend section, | ||
| Offset of second bend section, | ||
| First Section | Second Section | |
|---|---|---|
| Area, A | ||
| Curvature, | ||
| Centerline, s |
| Far Field | Nozzle Inlet | ||
|---|---|---|---|
| Core | Bypass | ||
| Ma = 0.7 | p = 46,563 Pa T = 250 K | p = 129,378 Pa T = 977.4 K | p = 131,452 Pa T = 401.8 K |
| Species | Core Flow | Bypass Flow |
|---|---|---|
| 0.0718 | 0.0004 | |
| 0.0001 | 0 | |
| 0.0294 | 0.0040 | |
| others (, , etc.) | 0.8987 | 0.9956 |
| Benchmark Functions | Sobol | NSGA-II | qParEGO | qEHVI | Max HV |
|---|---|---|---|---|---|
| Branin-Currin | 42.66 | 57.68 | 59.19 | 59.23 | 59.36 |
| Vehicle Safety | 188.85 | 236.21 | 245.88 | 246.53 | 246.82 |
| Parameter | Baseline | Single Serpentine | Optimal-1 | Optimal-2 |
|---|---|---|---|---|
| (mm) | 538 | - | 780 | 777 |
| AR | 5.15 | 5.2 | 5.22 | 7.69 |
| 0.9826 | 0.9886 | 0.9853 | 0.9812 | |
| (W/Sr) | 50.67 | 61.44 | 47.29 | 43.84 |
| (W/Sr) | 22.06 | 26.10 | 20.64 | 14.99 |
| (W/Sr) | 22.72 | 17.79 | 16.83 | 17.22 |
| (W/Sr) | 20.83 | 16.57 | 15.49 | 15.23 |
| (W/Sr) | 29.07 | 30.48 | 25.06 | 22.82 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Yang, Q.; Wang, R.; Wang, X. Multi-Objective Bayesian Optimization Design of Elliptical Double Serpentine Nozzle. Aerospace 2024, 11, 48. https://doi.org/10.3390/aerospace11010048
Zhang S, Yang Q, Wang R, Wang X. Multi-Objective Bayesian Optimization Design of Elliptical Double Serpentine Nozzle. Aerospace. 2024; 11(1):48. https://doi.org/10.3390/aerospace11010048
Chicago/Turabian StyleZhang, Saile, Qingzhen Yang, Rui Wang, and Xufei Wang. 2024. "Multi-Objective Bayesian Optimization Design of Elliptical Double Serpentine Nozzle" Aerospace 11, no. 1: 48. https://doi.org/10.3390/aerospace11010048
APA StyleZhang, S., Yang, Q., Wang, R., & Wang, X. (2024). Multi-Objective Bayesian Optimization Design of Elliptical Double Serpentine Nozzle. Aerospace, 11(1), 48. https://doi.org/10.3390/aerospace11010048