1. Introduction
Aeroengines, particularly high-bypass-ratio turbofan engines, serve as the primary power sources for aviation transportation [
1]. Aeroengines play crucial roles in improving fuel efficiency and cost-effectiveness. Engine Original Equipment Manufacturers (OEMs) strive to enhance the fuel mileage per unit of energy by continuously improving the engine design, increasing the combustion efficiency, and reducing the aerodynamic drag [
2]. This not only reduces the operating costs for airlines, but also decreases the reliance on finite fossil fuel resources, promoting the sustainable development of the aviation industry. However, prolonged operation in high-temperature and high-pressure environments leads to performance degradation over time. This deterioration can result in decreased performance, malfunctions, and even system failure, posing a significant threat to flight safety and reliability [
3]. The maintenance services and component replacement costs associated with aviation engines are substantial. For instance, the price of a single turbine blade can reportedly reach up to approximately USD 10,000 [
4]. Consequently, the development of an accurate, reliable, and efficient aviation engine health management system is crucial. Engine gas path performance diagnosis technology has emerged as a key focus in the development of engine health management systems and is currently a prominent area of research [
5].
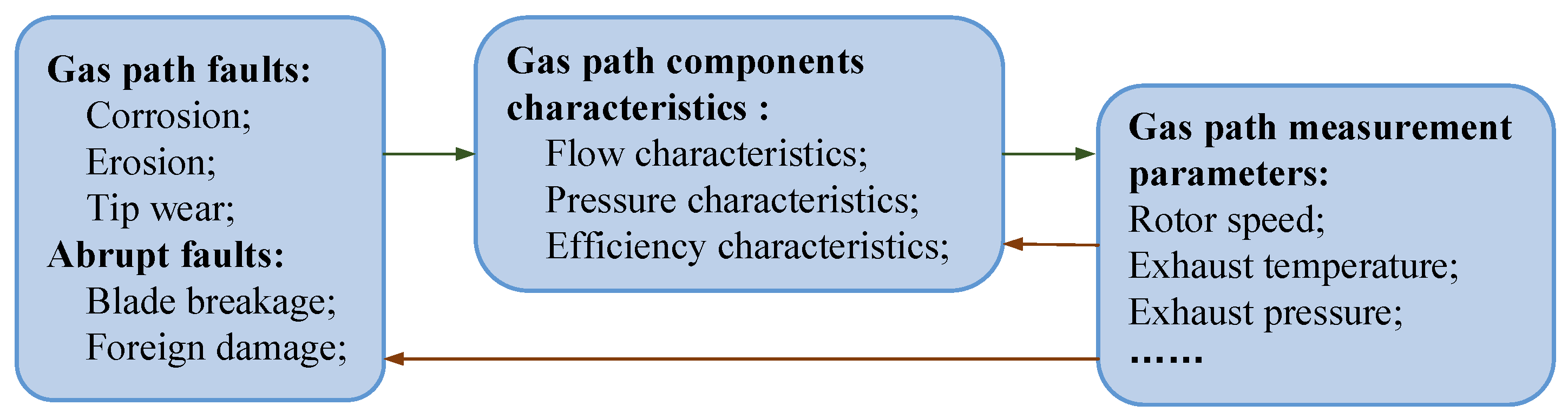
Gas path faults can be categorized into two main types: gradual degradation faults and abrupt mutation faults [
6]. During the engine’s prolonged operation, the component performance gradually deteriorates, leading to faults such as corrosion, erosion, fouling, and increased blade tip clearances. Abrupt mutation faults mainly include damage from internal and external objects, such as hail or bird strikes. These faults can cause a rapid decline in the component performance within a short period and may even lead to in-flight shutdowns [
7]. Typically, gas path faults primarily target the rotating components of the engine’s gas path, such as the fan, compressor, and turbine. Currently, most engine gas path performance diagnostic techniques are developed based on the Gas Path Analysis (GPA) theoretical framework. The derived methods can be broadly categorized into two classes: model-based and data-driven approaches [
8].
Model-based approaches aim to establish accurate mechanism models based on the actual characteristics of the engine. Such methods extract gas path information from multiple engine operating points to track the engine’s dynamic processes and state changes, enabling real-time fault diagnosis and prediction [
9]. For instance, Aretakis et al. [
10] developed a multi-fault equation model by extracting gas path information from multiple engine operating points. Ogaji et al. [
11] optimized the diagnostic errors for multiple engine operating points using genetic algorithms. Ying et al. [
12] addressed the issue of incomplete measurement parameters for engine fault diagnosis by utilizing multiple engine operating points. Li et al. [
13,
14,
15] improved the diagnostic and predictive range of the model by adjusting the engine performance characteristics under “off-design” conditions. Tsoutsanis et al. [
16] employed elliptical transformations to scale, shift, and rotate the speed lines in component characteristic maps, enhancing the transient diagnostic accuracy of the mechanism model. Subsequently, Tsoutsanis et al. [
17,
18] optimized the diagnostic scheme for transients using local window regression methods. Song et al. [
19] developed a diagnostic model for a three-axis engine with turbine cooling, demonstrating its diagnostic accuracy during transients. Kim et al. [
20] proposed a transient adaptive approach to predict potential faults during the early testing phase of an engine. Chen et al. [
21] introduced a sequential-based transient diagnostic method that is applicable to hydrogen-powered engines. In summary, the advantages of model-based approaches include their ability to predict a wide range of operating conditions with limited data. However, these approaches require specialized knowledge for development, and the extraction of engine operating points from a large volume of measurement data may lead to unnecessary information loss.
Data-driven methods, at their core, extract high-dimensional feature vectors that characterize the engine’s health state from existing experience and data. In contrast to model-based approaches, data-driven methods do not require extensive knowledge of engine physics [
22]. For instance, Zhou et al. [
23] employed support vector machines (SVMs) for engine gas path fault diagnosis. Park et al. [
24] optimized the accuracy of artificial neural networks (ANNs) in predicting engine operating characteristics. Tamilselvan et al. [
25] utilized deep belief neural networks (DBNs) for the fault classification of engine health states. Bai et al. [
26] employed convolutional neural networks (CNNs) for fault detection in engine combustion chambers. Luo et al. [
27] used autoencoders (AEs) to detect anomalies in the engine gas path. Lu F et al. [
28] proposed a multi-rate sensor fusion approach using information filters for estimating aeroengine performance degradation. Although data-driven models offer robustness and real-time capabilities, they are essentially mathematical “black boxes” that lack explicit physical information, making it challenging for engine operators to interpret their underlying mechanisms. Moreover, the generalization of data-driven models is difficult to ensure due to factors such as component degradation and operating conditions, thereby limiting the applicability of data-driven methods.
Currently, the concept of digital twins has emerged as an innovative approach. Digital twin technology combines the physical and digital worlds by creating virtual replicas of physical entities. These replicas are used for the simulation, optimization, and prediction of various scenarios and situations, resulting in improved efficiency and cost reduction [
29]. In the field of aeroengines, digital twin technology is still in its developmental stage. For instance, Fentaye et al. [
30] proposed a gas path performance diagnostic method that combines SVM and ANN. LU et al. [
31] introduced a diagnostic method based on DS evidence theory and data fusion. Xiong et al. [
32] presented a digital twin framework that integrates data with LSTM, a deep learning method, for engine maintenance decision making. Zhou et al. [
33] developed an engine health assessment system by combining the Kalman filter (KF) with LSTM and incorporating CNN. Envelope et al. [
34] developed an adaptive correction method for turbofan engines based on an LSTM neural network and the hybrid optimization method. However, most of these studies focus on the fusion of data-driven models without fully leveraging the complementary advantages of mechanism models and data-driven models. Currently, there is a lack of sufficient research on how to effectively utilize digital twin technology to integrate mechanism models and data-driven models [
35].
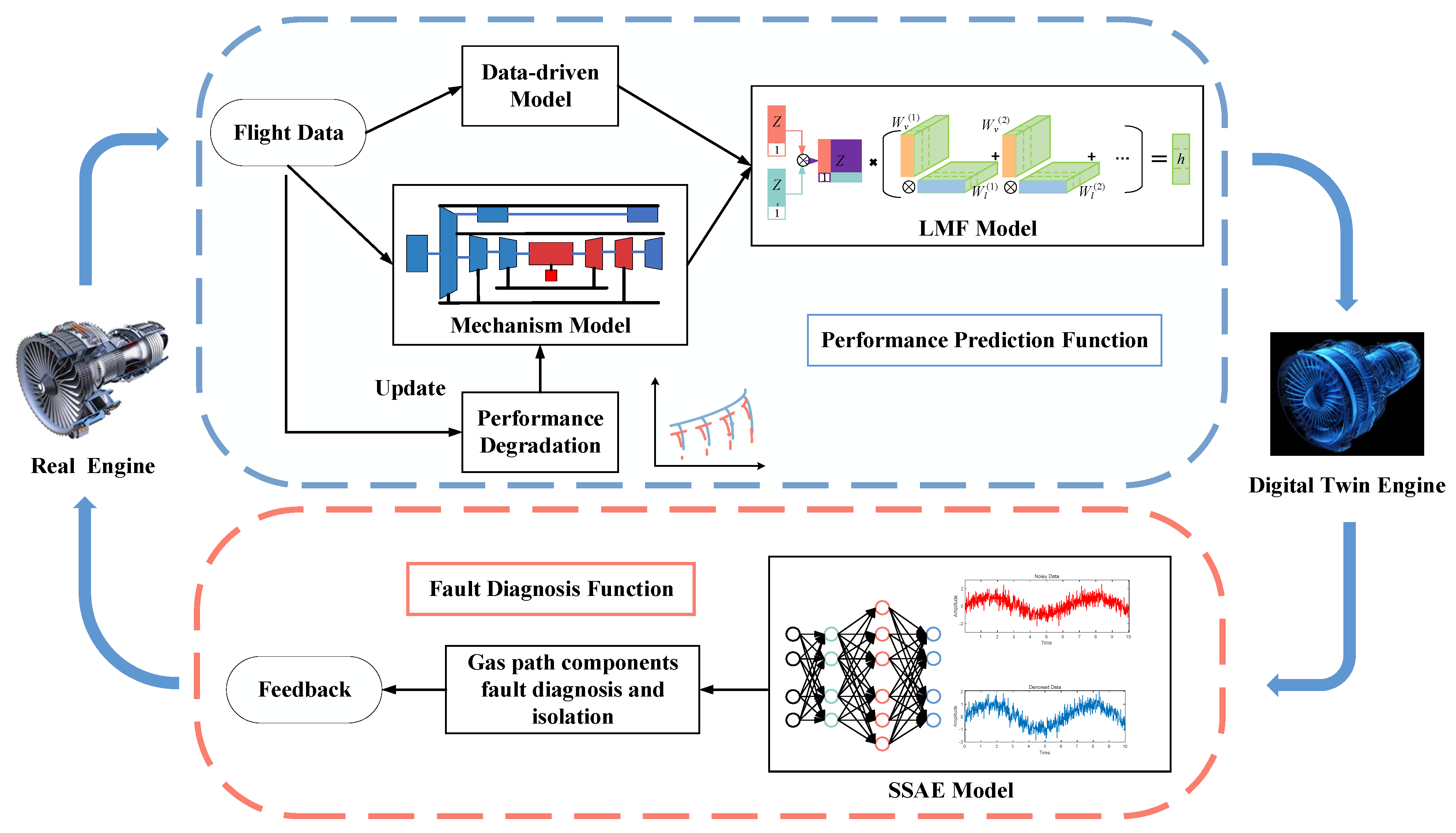
To address the limitations of previous methods for performance diagnosis in aeroengines, this study proposes a novel digital twin framework that is specifically designed for twin-spool turbofan engines. The proposed digital twin framework combines the advantages of mechanism models and data-driven models to achieve more accurate results. This research aims to explore the application of digital twin technology in gas path performance diagnosis for turbofan engines and contribute to this growing research field. The main contributions are as follows:
The proposed digital twin framework provides a new approach for effectively integrating mechanism models and data-driven models in engine performance diagnosis.
The proposed digital twin framework incorporates the strengths of mechanism models and data-driven models, allowing for continuous updates to follow engine performance changes while ensuring high-precision monitoring. Compared to purely model-based or data-driven methods, the proposed digital twin framework exhibits a higher prediction accuracy and diagnostic precision.
Serving as a more reliable and efficient tool for gas path diagnosis, the proposed digital twin framework enables more intuitive monitoring of the engine health and provides more effective technical support for establishing engine health management systems.
4. Case Study
4.1. Gas Path Parameters Prediction Verification
Due to the difficulty of obtaining long-term operational data for engines, this study utilizes the mechanism model for the simulation to obtain “real” engine degradation data. Previous research has demonstrated the feasibility of this verification method [
53,
54,
55].
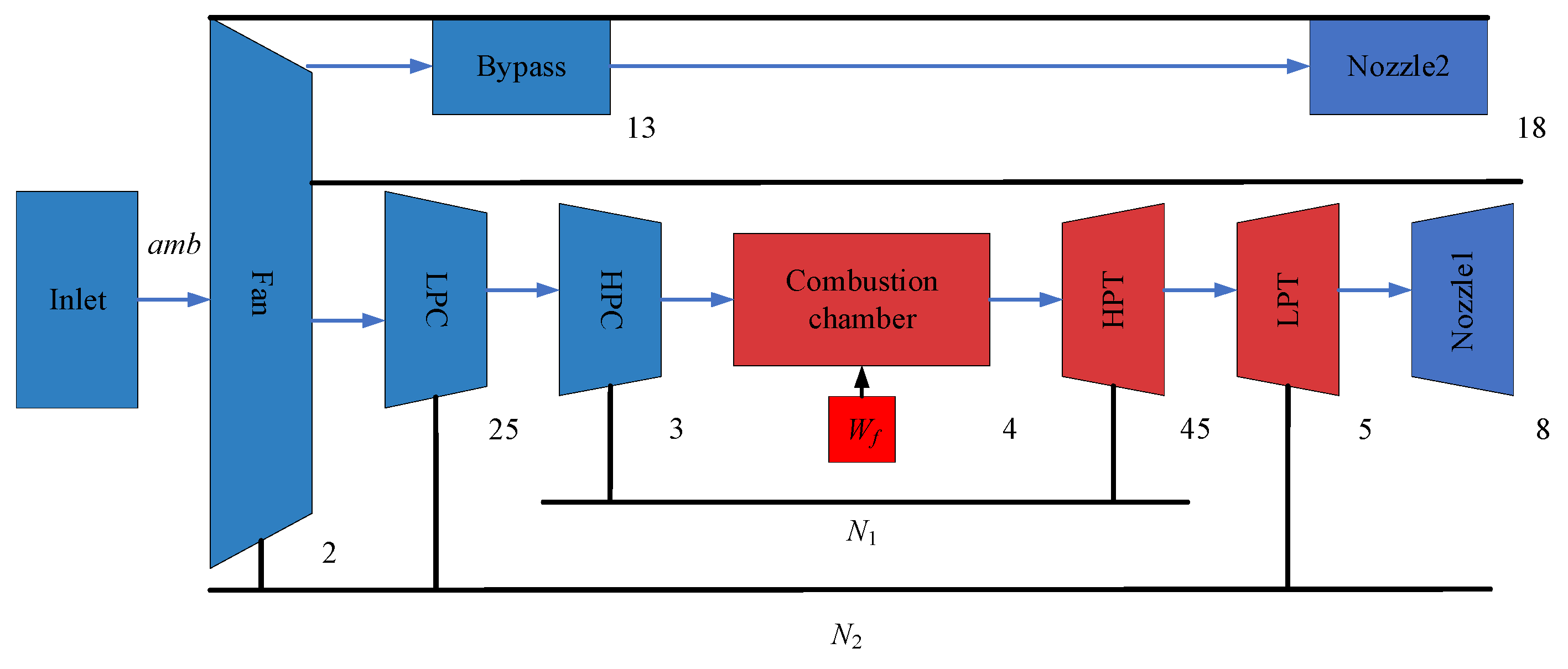
Section 2.1 introduced the relevant information regarding the aeroengine applied in this study. The typical performance degradation trend for a turbofan engine defined in the literature [
56,
57,
58] was selected to simulate the degradation behavior during long-term engine operation. It is assumed that all five rotating components experience simultaneous performance degradation, and the propagation trend of performance deterioration can be described using an exponential function based on flight cycles. The degradation propagation function used in this study is defined as follows:
In Equation (34),
a represents the degradation rate of
DF,
t represents the number of flight cycles, and
b represents the flight cycle exponent coefficient.
Table 5 presents the coefficient values of “a” and “b” for the five rotating components’ performance degradation propagation exponential functions, which describe the degradation propagation pattern with respect to the flight cycles. The propagation pattern assumes a maximum of 6000 flight cycles, indicating that the engine is considered to have failed after reaching 6000 flight cycles. In this study, the actual engine’s performance degradation corresponds to 3000 flight cycles, and the
DF corresponding to 3000 flight cycles is injected into the mechanism model to obtain the “real” flight data.
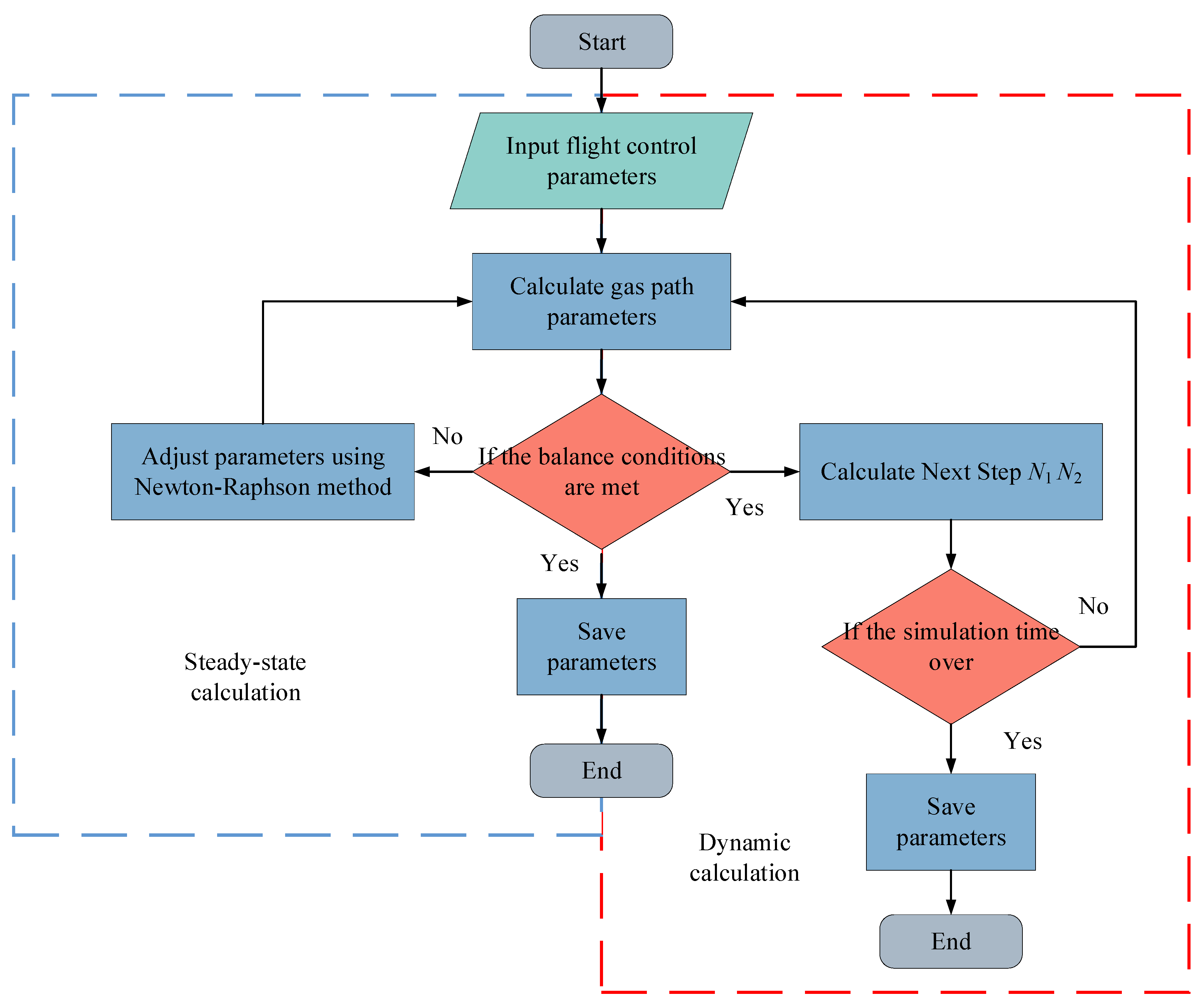
To validate the reliability of the proposed digital twin framework, the method was tested following the process framework depicted in
Figure 11. Considering the specific engine information and actual sensor measurement conditions, the measurement noise was added to the simulated data to better mimic the engine’s flight conditions. Assuming that the measurement noise follows a normal distribution,
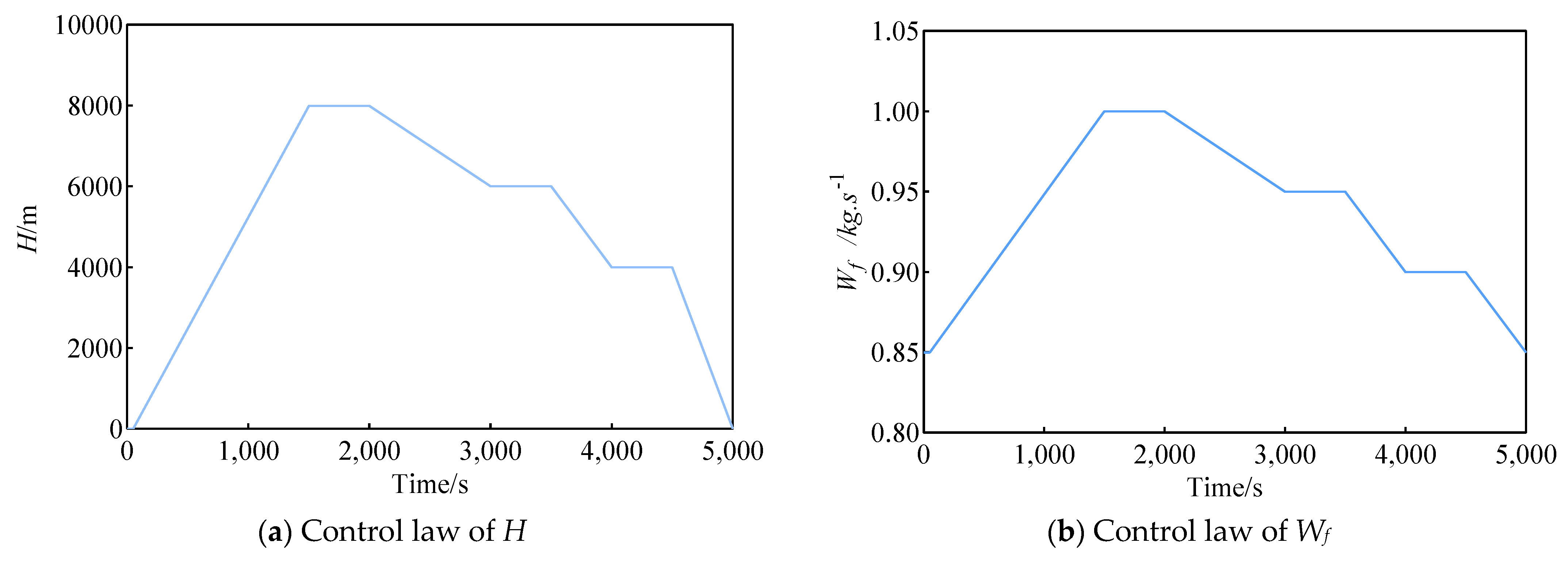
Table 6 lists the gas path parameters used in this study and their corresponding noise levels. In this study, we intentionally introduced a small deviation as simulated noise after applying noise reduction techniques. However, it is important to note that the primary focus of this study does not encompass the investigation of the impact of measurement noise on the model accuracy. Additionally, as the inputs for the mechanism model and data-driven model are the flight control data (
H,
Ma, and
Wf), to make the study case more realistic, we simulated the typical flight trajectory of a commercial twin-spool turbofan engine, and the variations of the flight mission control data are shown in
Figure 12. From
Figure 12, it can be observed that except for the cruise phase,
H keeps changing, while
Wf gradually increases during the climb phase. The mechanism model generates the corresponding flight data based on this flight control pattern, with one data point generated per second. The data-driven model utilizes the generated flight data as training samples, while the mechanism model updates the performance degradation by extracting the engine operating points from the flight data.
Figure 13 illustrates a comparison of the output results from different models. It can be observed from
Figure 13 that the mechanism model without degradation updates exhibits significant errors compared to the actual engine output. Although the mechanism model with degradation updates can better reflect the changing trend of the gas path parameters, there are still certain deviations in its output. This is because the mechanism model considers relatively ideal conditions and cannot differentiate the influence of factors such as the measurement noise and external environment in the data, thus making it difficult to achieve an accurate prediction of the engine gas path parameters. On the other hand, the data-driven model shows good predictive results, effectively reflecting the changing trend of the gas path parameters in the aeroengine. This is because the data-driven model can dynamically learn based on historical and current data, providing stronger real-time capability. Moreover, the data-driven model can incorporate the influence of the measurement noise and external factors during the learning process. However, the data-driven model is a black-box model that cannot provide the changing trend of the engine’s unmeasurable data (such as the component characteristic parameters). In comparison, the digital twin approach demonstrates the best prediction results for the gas path parameters, which are closer to the actual data. Furthermore, to better demonstrate the superiority of the proposed digital twin framework, we compared the mean absolute percentage error (MAPE) of the predicted values from different models. The formula for calculating the MAPE is as follows:
where
yi and
y*i represent the actual value and predicted value of the
i-th data sample, respectively.
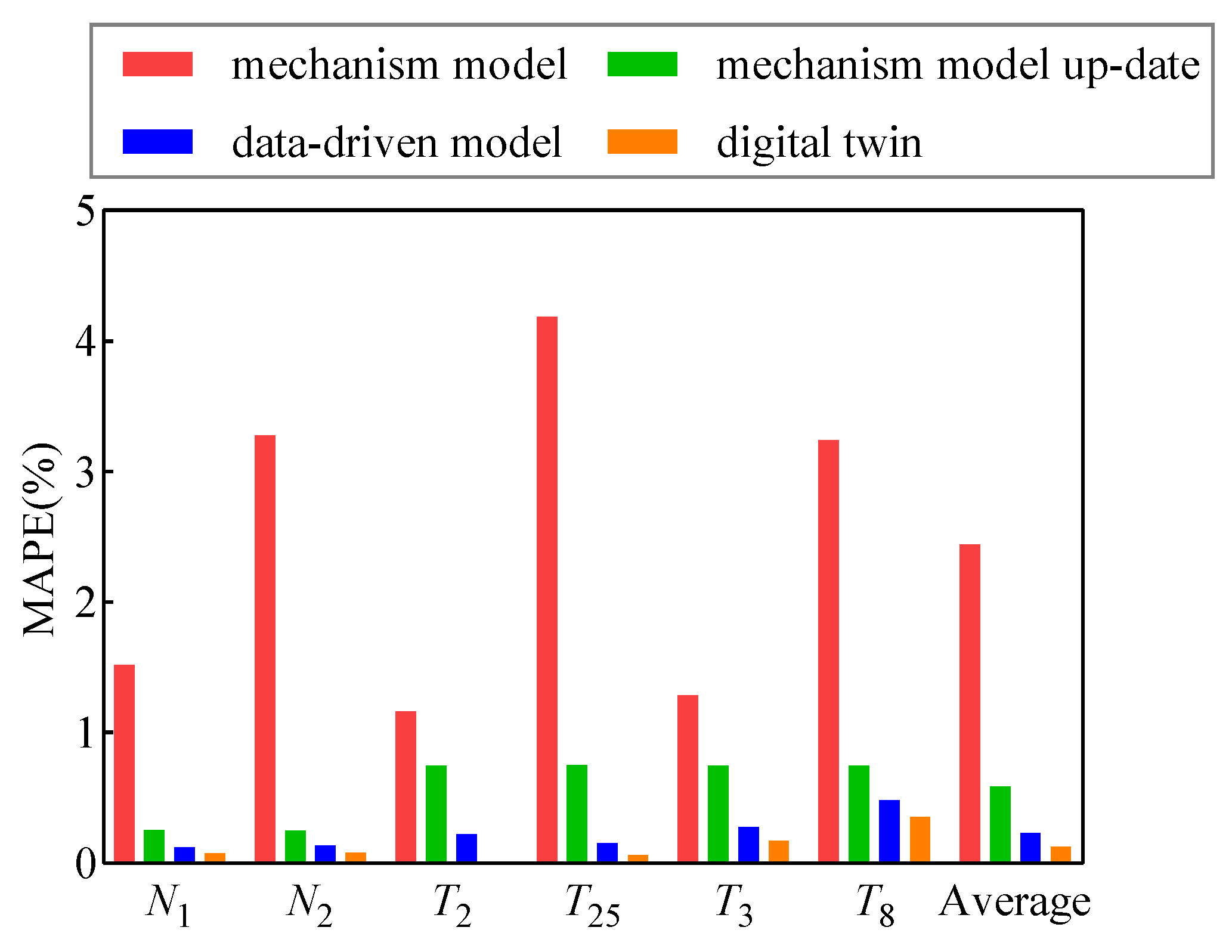
Figure 14 and
Table 7 present the MAPE of the gas path measurement parameters obtained using different models. It can be observed that the mechanism model without performance degradation updates exhibits significant errors compared to the actual engine outputs, with a maximum MAPE of 4.184% and an average MAPE of 2.443%. In contrast, the mechanism model with performance degradation updates shows fewer prediction errors, with an average MAPE reduced to 0.583% compared to the original mechanism model. This indicates that the mechanism model with performance degradation updates can achieve a higher accuracy in real-time condition monitoring. The overall MAPE of the data-driven model is 0.232%, while the digital twin model achieves an even lower overall MAPE of only 0.125%. It can be seen that the digital twin method has smaller errors compared to the mechanism model and the data-driven model, demonstrating a significant improvement in the prediction performance. Although the MAPE of the data-driven model is higher than that of the digital twin method, its prediction results are significantly better than the mechanism model. This is because the mechanism model can reflect the trend of the engine performance changes but cannot handle small measurement deviations or noise in the actual measurements. On the other hand, the data-driven model can absorb the influence of noise during the learning process, but as a black-box model, it cannot reflect the degradation of the unmeasurable parameters (such as the mass flow, pressure ratio, and efficiency) of the engine, which hinders the representation of the performance change trends. The proposed digital twin framework incorporates information from both the mechanism model and the data-driven model, leveraging the advantages of both modalities to achieve high-precision predictions while continuously tracking the performance changes in the engine. This provides a more effective basis for subsequent gas path fault diagnosis.
4.2. Gas Path Fault Diagnosis Verification
Through the case study in
Section 4.1, we validated the accuracy of the digital twin framework in predicting the aeroengine gas path parameters. It can more accurately simulate the actual engine’s gas path measurement parameters, making it suitable for engine condition monitoring. However, due to the difficulty in obtaining the actual fault data for aeroengines, we also use a mechanism model here to simulate the engine’s gas path fault data and combine it with the SSAE model to perform a gas path fault diagnosis for the engine, thus achieving an integrated digital twin framework for aeroengine performance diagnosis. In this setup, we still set the actual engine with a performance degradation corresponding to 3000 flight cycles and generate gas path fault data using the mechanism model as described in
Section 3.2. Based on the degradation rates in
Table 3, we randomly generate the performance parameters of each gas path component within the degradation range to create a dataset for validating the gas path fault diagnosis functionality. The data in the dataset are engine sensor information, which were processed according to the noise levels in
Table 6. A total of 2700 data samples were collected, with 300 samples for each type of fault, and each fault sample is independent of the others.
To better validate and evaluate the diagnostic performance of the proposed digital twin framework, we additionally include a comparison with DBN [
25], CNN [
26], and SSAE models that are built solely using engine sensor information. These models have been widely applied in practical engineering and have demonstrated excellent performance. Unlike the SSAE model that is used in the digital twin framework, they utilize only a single modality of information.
Table 8 presents the network structure information for these models.
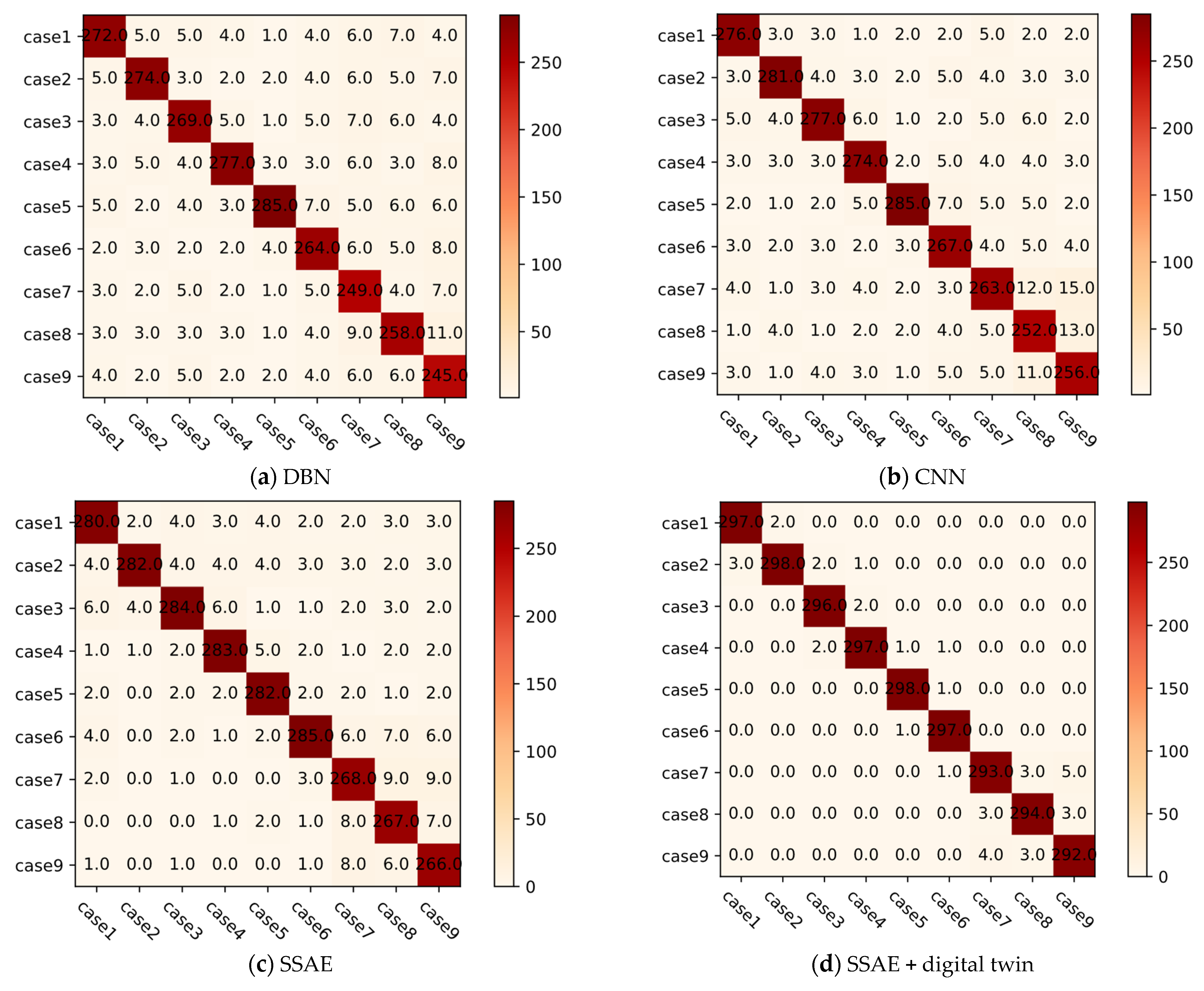
Figure 15 illustrates the diagnostic confusion matrices corresponding to various deep learning networks and the digital twin framework, while
Table 9 summarizes their overall diagnostic accuracy and CPU processing time. From
Figure 16d, it is evident that the SSAE
+ digital twin framework can clearly distinguish between the nine fault types, with only a small number of fault samples causing confusion. However, in the three fault cases (Case 7, Case 8, and Case 9) involving multiple coupled gas path faults, there are relatively more instances of confusion. This is because extracting multiple fault features becomes more challenging. For the proposed SSAE
+ digital twin framework in this paper, Case 7, Case 8, and Case 9 have seven, six, and eight misclassified fault samples, respectively. Specifically, in Case 7, three fault samples are misclassified as Case 8, and four fault samples are misclassified as Case 9. In Case 8, three fault samples are misclassified as Case 7, and three fault samples are misclassified as Case 9. In Case 9, five fault samples are misclassified as Case 7, and three fault samples are misclassified as Case 8. However, the misclassified fault samples constitute only a small portion of the overall samples, and compared to the other three methods, the number of misclassified fault samples is significantly reduced.
According to the data in
Table 9, it can be observed that the overall diagnostic accuracies of the DBN, CNN, and SSAE are 88.6%, 90.1%, and 92.5%, respectively. Among them, the SSAE has a higher accuracy compared to the DBN and CNN. This is because the SSAE applies sparsity constraints to the outputs of each hidden unit, limiting the model’s complexity and reducing the risk of overfitting, thereby improving the generalization performance of the model. The overall accuracy of the digital twin
+ SSAE method reaches 98.6%, significantly outperforming the three aforementioned methods.
The SSAE plays a central role in the digital twin framework for gas path fault diagnosis. Through the multimodal data fusion in the digital twin framework, the accuracy of the SSAE is significantly improved. Compared to the DBN, CNN, and SSAE, the proposed digital twin + SSAE method achieves improvements of 10%, 8.5%, and 6.1% in the overall accuracy, respectively. This indicates a significant enhancement in the diagnostic performance of the SSAE through the fusion of multimodal data in the digital twin framework. The digital twin framework, unlike single-modal information-based gas path fault diagnosis methods, effectively extracts valuable features from the engine gas path data from different modalities through the LWF method. This improves data reliability and enhances the accuracy of the gas path fault diagnosis in engines by leveraging the fusion of multimodal information.
In terms of the diagnostic time, all the methods were run on a computer with an AMD Ryzen 9 3900X CPU and 32 GB of memory. The SSAE showed the shortest CPU computation time, with 47.25 s. The DBN and CNN had CPU computation times of 52.11 s and 69.39 s, respectively. The proposed digital twin + SSAE method had the longest CPU computation time, which was 93.96 s. This is understandable, as the digital twin framework processes more information from different modalities. However, it still demonstrates a fast computation time, requiring only 0.0348 s to process the diagnosis for a single engine operating point. Considering the trade-off between the performance prediction accuracy, diagnostic accuracy, and computation time, the proposed aeroengine digital twin framework has clear advantages over the other models and is suitable for aeroengine performance diagnosis tasks.
4.3. Economic Evaluation of Gas Path Performance Degradation
During actual flight, aircraft engines typically maintain a constant takeoff weight, necessitating a consistent level of thrust. Consequently, assuming that the engine maintains a certain thrust throughout different flight stages, engine degradation will cause an increase in the fuel flow rate as a control measure to compensate for the reduced performance. The following equation presents the formula for calculating the additional fuel volume (
Wfe) generated by the flight mission due to degradation:
In the equation,
Wfd represents the fuel flow rate of the engine after degradation,
Ti represents the total duration of the flight mission, and
i represents the
i-th flight phase among
n flight segments. The calculation method for the additional fuel cost (
Cf) incurred by the entire airline fleet due to engine degradation is
In the formula, Fup represents the fuel price, and TNumE represents the total number of engines in the entire fleet.
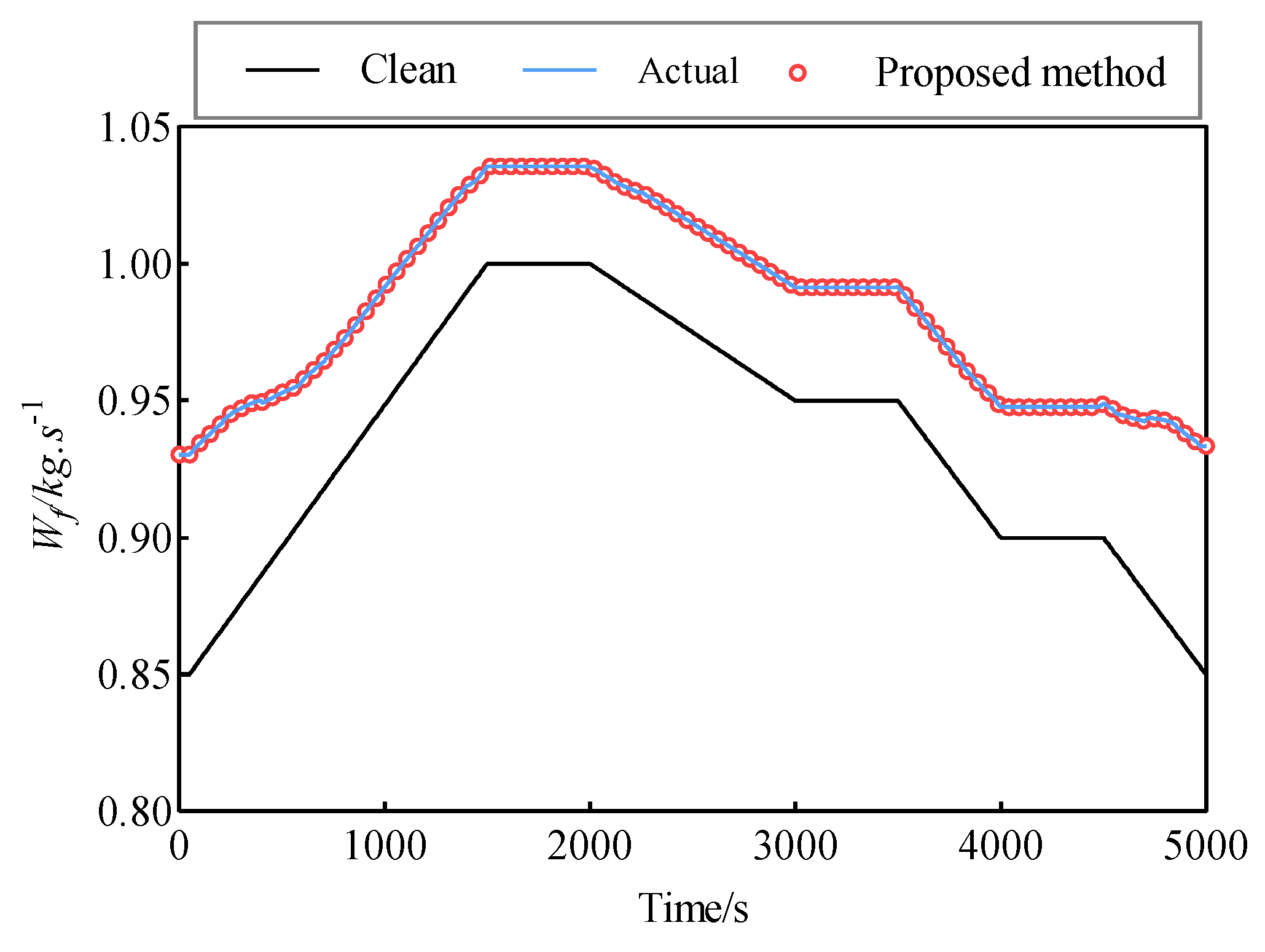
This study involves the estimation of the flight trajectory, as illustrated in
Figure 12, and utilizes the DF injection mechanism model for 3000 flight cycles to determine the corresponding fuel flow rate while maintaining the same thrust as in a clean state. In
Figure 16, a comparison of the fuel consumption using the digital twin method is shown for both the clean and degraded states, demonstrating highly accurate prediction results. Based on the current market price of aviation fuel, which is approximately USD 0.887/kg, and using formulas (36) and (37), the additional fuel cost (
Cf) for the next engine in the flight cycle due to degradation is approximately USD 209.5. This significant increase in the fuel cost highlights the detrimental impact of aviation engine degradation on the economy of engine users. In conclusion, this study demonstrates that aviation engine degradation can have a substantial negative effect on operational costs for engine users, emphasizing the importance of monitoring and managing the engine health to mitigate these economic implications.
The aeroengine gas path diagnosis technology is of significant importance in reducing maintenance costs and improving the economic efficiency of engines. This research can be applied to analyze the performance degradation trends of engine health conditions, enhance the thermal efficiency of engines, and optimize flight missions. Additionally, this research holds the potential to contribute to improving maintenance decision making, prolonging the service life of aeroengines, and ensuring the safety and reliability of aviation operations.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}