Abstract
Advanced Air Mobility (AAM) is a concept that is expected to transform the current air transportation system and provide more flexibility, agility, and accessibility by extending the operations to urban environments. This study focuses on flight test, integration, and analysis considerations for the feasibility of the future AAM concept and showcases the outputs of the Air Mobility Urban-Large Experimental Demonstration (AMU-LED) project demonstrations at Cranfield University. The purpose of the Cranfield demonstrations is to explore the integrated decentralized architecture of the AAM concept with layered airspace structure through various use cases within a co-simulation environment consisting of real and simulated standard-performing vehicle (SPV) and high-performing vehicle (HPV) flights, manned, and general aviation flights. Throughout the real and simulated flights, advanced U-space services are demonstrated and contingency management activities, including emergency operations and landing, are tested within the developed co-simulation environment. Moreover, flight tests are verified and validated through key performance indicator analysis, along with a social acceptance study. Future recommendations on relevant industrial and regulative activities are provided.
Keywords:
Advanced Air Mobility; urban air mobility; U-space; UAS; UTM; flight test; co-simulation; U-space services 1. Introduction
Advanced Air Mobility (AAM) is a rapidly emerging field that promises to transform the current air transportation system. Building upon the advances in Unmanned Aircraft Systems (UASs), AAM represents the next step in the evolution of air transportation. Unlike the traditional air transportation, AAM will expand its operations to areas that are currently underserved or not served at all, such as urban, suburban, local, regional, and rural areas. This will make air travel more flexible and accessible to a wider range of users, including emergency services, businesses, and individuals. However, for enabling and benefiting from the full potential of AAM, there are many challenges to overcome and numerous topics to cover regarding the infrastructure, integration, technology, safety, vehicle types, traffic structure, roles and responsibilities, regulations, privacy, environmental impact, and social acceptance.
All the studies to date focus mainly on answering questions such as how this futuristic AAM concept will be operable, who should be responsible for which task, what base requirements are needed to make this concept a reality in the near future, and, most importantly, how the defined concepts can be tested and validated. AAM-related concept definitions and its smooth transformation and integration are explored by various stakeholders across the world. For designing and validating these concepts of operation (ConOps), the Federal Aviation Administration (FAA), National Aeronautics and Space Administration (NASA), and various industrial partners took initiative in the United States and defined Urban Air Mobility (UAM) and UAS Traffic Management (UTM) concepts through envisioned operations and use cases [1,2]. There are additional ConOps by NASA that provide detailed information and cover every aspect regarding passenger-carrying UAM [3] and by Boeing and Wisk that explore and elaborate on the operations for passenger-carrying uncrewed and autonomous UAM [4]. Airbus also published a blueprint concerning the safe integration of passenger and cargo flights within the UAM concept [5]. Embraer and Airservices Australia collaborated on developing the Urban Air Traffic Management (UATM) concept in Australia, where the methods of safely handling traffic are elaborated [6]. In the United Kingdom (UK), UK Research and Innovation sets the vision and creates a roadmap for the future aviation concept in 2030 [7]. For Europe, initial ConOps is drafted by ConOps for European UTM systems (CORUS) project under Single European Sky Air Traffic Management (ATM) Research Joint Undertaking (SESAR JU), where the U-space system and its supporting services and procedures for enabling the future AAM are outlined [8] and extended further with demonstrations in the CORUS XUAM project [9]. The U-space concept is first introduced by SESAR JU, where the purpose is to provide safe and efficient operations via new services and specific requirements [10].
Apart from developing an outline for the future AAM concept, there are various research efforts and projects focusing on the new concepts, aforementioned challenges, demonstration, and validation to enable the future of air transportation. The European Union Aviation Safety Agency (EASA) has addressed the social acceptance aspect of the UAM concept in Europe by conducting a survey to see if people are ready and aware of such concepts considering safety, privacy, environmental, and security aspects [11]. Different airspace structures are considered through safety, stability, and efficiency terms for dense traffic of drone deliveries in [12]. Also, there are many projects under SESAR JU focusing on the AAM concept, its challenges, demonstration, and validation efforts to achieve the future AAM system. The “advanced integrated remotely piloted aircraft system (RPAS) avionics safety suite” (AIRPASS) project aims to explore the on-board systems, such as autopilot, communication navigation and surveillance (CNS), and detect and avoid (DAA) systems [13,14]. PercEvite also focuses on providing a DAA system for small drones, which is developed as a lightweight system [15]. Initial U-space services (U1/U2 services), such as flight planning management, e-identification, tracking, and monitoring, are tested with flight trials in “U-Space initial services” (USIS) [16]. In the “integrated security concept for drone operations” (SECOPS) project, the security aspect of the U-space is focused on [17]. A command and control data link architecture is discovered for U-space systems under the “drone critical communications” (DroC2om) project [18], and the basis of the surveillance technology for U-space is provided by the “clear air situation for UAS” (CLASS) project [19]. “Technological European research for RPAS in ATM” (TERRA) designed an architecture for safe very low level (VLL) operations by considering ground-based technologies to provide U-space services properly and simulated and demonstrated the provided approach [20]. Development of an information management system is covered in two different projects: “Information management portal to enable the integration of unmanned systems” (IMPETUS) [21] and “Drone European AIM study” (DREAMS) [22], which are projects that aim to decide on the required information flow between stakeholders for safe operations, which enables testing some of the U-space services. The “Defining the building basic blocks for a U-space separation management service” (BUBBLES) project develops a U-space separation management system to be used in relevant U-space services such as strategic deconfliction and traffic information [23]. The purpose of the “Demand and capacity optimisation in U-space” (DACUS) project is to develop a demand–capacity balancing concept depending on risk levels and social acceptance in terms of noise and visual pollution [24]. A common altitude reference system is defined and its usage areas are explored by focusing on new services, such as vertical conversion service, vertical alert service, and real-time geographical information service, in the “Integrated common altitude reference system for U-space” (ICARUS) project [25]. There are also projects such as “U-space separation in Europe” (USEPE) [26], “A unified approach to airspace design and separation management for U-space” (Metropolis 2) [27], and “Tactical instrumental deconfliction and in-flight resolution” (TINDAIR) [28] that aim to provide, develop, and test new approaches for separation management both at strategic and tactical levels. The “ATM U-space interface” (PJ34-W3 AURA) project deals with setting the required guidelines and validating the U-space integration with ATM through a collaborative ATM/U-space interface [29]. Some of the U-space services and interoperability between ATM and U-space in urban areas are demonstrated through a flight information management system by providing safe connectivity in the “Gulf of Finland U-space” (GOF USPACE) project and extending the demonstration efforts with GOF2.0 USPACE [30,31]. “Demonstration of multiple U-space suppliers” (DOMUS) tests the centralized architecture through some of the U-space services, such as strategic and tactical deconfliction [32]. Another project, “Geofencing for safe and autonomous flight in Europe” (GEOSAFE), concerns demonstration of the geofencing capabilities at different phases [33]. There are many more SESAR JU projects concerning demonstration of the U-space concept, its safe integration, safe operations, and some of the U-space services and focusing on various use cases. These projects can be listed as “Proving operations of drones with initial UTM” (PODIUM) [34], “Safe and flexible integration of advanced U-space services for medical air mobility” (SAFIR-Med) [35], “European UTM testbed for U-space” (EuroDRONE) [36], “D-flight internet of drones environment” (DIODE) [37], Uspace4UAM [38], and “Validation of U-space and its services by tests in urban and rural areas” (VUTURA) [39]. Furthermore, NASA has undertaken significant research efforts under the Advanced Air Mobility National Campaign to realize the future AAM concept with various industrial and academic partners. Those studies shape the AAM concept from different stakeholders’ perspectives. The integration concepts that are considered by NASA and how those concepts can create an impact on defining missions, vehicle concepts, airspace structures, and observing possible risks are elaborated in [40]. Vertiports, their design considerations in terms of size and configuration, relevant services, and automation concerns for managing the high-density traffic that is anticipated with the future AAM system are covered in [41,42]. From a CNS point of view, technologies that can be useful for providing a safe and efficient environment for AAM in terms of communications, navigation, and surveillance are elaborated in [43]. In [44], NASA’s approach on automated operations and contingency management activities is discussed. Possible failures and hazards considering the platforms to be utilized in UAM operations are explored in [45]. Also, there are studies focusing on UAM demand prediction, which can be used in use case definition and possible traffic network creation for AAM [46]. Acoustic tests of Joby Aviation’s AAM vehicle are conducted by NASA, which is a complete demonstration of an AAM vehicle through a full operation [47]. Apart from that, the FAA initiated a UAS Test Site Program to test multiple UAS operations along with UAM concepts for integration purposes of the UASs into the current air transportation system [48]. Additionally, Vantis network, a UAS ecosystem in North Dakota, United States, is deployed to enable and coordinate UAS operations with proper communication infrastructure and regulatory framework in partnership with the FAA [49].
Air Mobility Urban-Large Experimental Demonstration (AMU-LED) is one of the very large demonstration (VLD) projects supported by SESAR JU. AMU-LED aims to integrate UAM with manned aviation, develop advanced U-space services and a system-wide contingency management structure, test both centralized and decentralized UAM architectures, and finally validate all the defined concepts via real and simulated flight trials. Last but not least, AMU-LED considers the social acceptance aspect of the UAM concept during these demonstration flights.
Cranfield demonstration is one of the legs for validation tests of the AMU-LED ConOps. In general, Cranfield demonstration concerns validating the decentralized ATM integrated U-space architecture with layered airspace structure at controlled airspace and showing its feasibility, as shown in Figure 1, as well as showcase the advanced autonomous U-space services within the developed co-simulation environment [50] and test the holistic contingency management concept [51,52] from the operator’s perspective via emergency operations and landing. The details of the AMU-LED ConOps can be found in [53]. Finally, surveys are conducted and analyzed to test the level of social acceptance specific to Cranfield demonstration. This paper covers and reports the demonstration efforts conducted in Cranfield for the AMU-LED project.
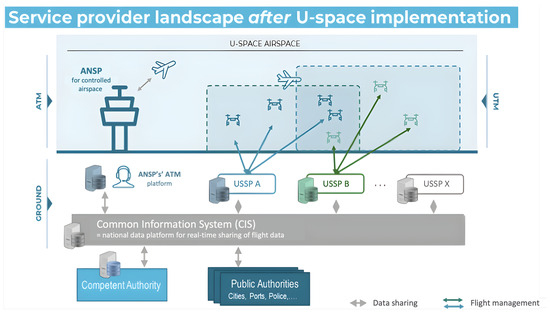
Figure 1.
Decentralized architecture for UAM.
The rest of the paper is organized as follows: Section 2 briefly explains the project objectives that are satisfied during the Cranfield demonstration. Section 3 covers the methodology that is followed for the Cranfield flight trials considering the tasks of each stakeholder during the demonstration and the defined and operated scenarios to validate the introduced concepts. In Section 4, the results of the metric analysis, objectives, and social acceptance study are provided and industrial and regulative recommendations are discussed. Finally, Section 5 summarizes the main conclusions of this AAM demonstration work.
2. Objectives of the Flight Trials
The AMU-LED Cranfield demonstration is a comprehensive initiative designed to demonstrate the potential of U-space services in urban air mobility. Covering a wide range of objectives, the project aims to exhibit the effectiveness of U-space services in various scenarios, including management of prioritized flights, contingency management, coexistence of different types of vehicles, coordination with ATC, vertiport flow management, beyond visual line of sight (BVLOS) flights, rerouting capabilities, transition from uncontrolled to controlled airspace, CNS performance, deconfliction by two different U-space service providers (USSPs), and architecture. Conducted under various key environmental conditions and involving multiple drone operators and USSPs, the experiments rely heavily on automation to ensure the safe and efficient operation of urban air mobility systems. The AMU-LED project combines different flights tests over Cranfield, Amsterdam, Enschede, Rotterdam, and Santiago de Compostela to demonstrate every aspect of the future AAM concept [54]. The Cranfield demonstrations mainly focus on the technical feasibility of the AMU-LED solution to achieve the future AAM system. In Amsterdam, Enschede, and Rotterdam, the public acceptability, social impact, and economic viability aspects of the AAM concept are explored. Finally, in the Santiago de Compostela tests, the final proof of concept of the proposed solutions under AMU-LED for AAM is conducted.
This demonstration seeks to showcase the capabilities of U-space services in promoting safety and coordination in increasingly complex airspace systems. The success criteria for these demonstrations include safe prioritization and reconfiguration of flights, prevention of mid-air collisions, avoidance of wake-turbulence-related hazards, seamless communication and information exchange between all actors, and ensuring no risk to third parties on the ground or in buildings. By demonstrating these capabilities, the Cranfield demonstration aims to foster a deeper understanding of the potential of U-space services and their role in advancing urban air mobility, ultimately paving the way for safer and more efficient aerial transportation systems in urban environments.
Along with the defined objectives, the developed concepts under the AMU-LED project are also intended to be validated via the Cranfield demonstration. There are several concepts that are focused on. For separating standard-performing vehicle (SPV), high-performing vehicle (HPV), and conventional manned aviation flights, the layered airspace structure is introduced with AMU-LED. The layered airspace structure consists of three main layers named as standard-performance layer (SPL), high-performance layer (HPL), and manned aviation. The main purpose of this structure is to differentiate especially the VLL operations as SPL and HPL to provide safety and efficiency [53,55]. Moreover, vertical corridors from vertiports to HPV layers are explored. The ability to have HPV and SPV flights operating within the controlled airspace via a collaborative ATC interface is covered. The decentralized architecture is also studied for proper data flow between different USSPs via the discovery and synchronization service (DSS). Last but not least, the system-wide contingency management concept is explored, which considers every stakeholder and their tasks for contingency planning [51,52]. Contingency management actions are considered as emergency landing to safe and emergency landing zones (SELZs). SELZs are the less risky areas calculated through a risk assessment process. The contingency scenarios include USSPs alerting the operators for non-conformance and operators selecting the proper actions. Additionally, in terms of safety, the surrounding traffic disrupted by contingent flights is handled by providing pre-tactical/tactical conflict resolution.
3. Methodology
This section covers the methodological approach that is followed for structuring the AMU-LED Cranfield demonstration. The details of the information and task flow and interaction between the stakeholders are provided. Furthermore, the considered use cases, along with the defined scenarios that are showcased during the Cranfield demonstration to test the safe and efficient integration of the future AAM concept, are elaborated.
3.1. Cranfield Demonstration Flow
For the demonstration, Cranfield Digital Tower took part as the air traffic controller (ATC) and Cranfield Airport acted as both an airport and vertiport. Additionally, Cranfield University played a significant role as a UAS operator during the demonstration, which involved obtaining flight permission from the Civil Aviation Authority (CAA) for real platform flights. The demonstration featured two standard-performing vehicles (SPVs), namely the Swift vertical take-off and landing (VTOL) and the Multicopter, which are highly durable and capable to carry payload with custom avionics. The Swift VTOL and Cranfield Multicopter are modified versions of MAKE FLY EASY and YANGDA YD6-1600L, respectively. As part of a collaboration with Satellite Applications Catapult, the Multicopter platform is used to test 4G + Satcom communication capabilities, which enabled an internet connection to be established onboard. In addition to conducting real flights, Cranfield University acted as a virtual AAM operator using an AAM simulator that served as an HPV. This simulator provided visitors with a virtual reality (VR) experience of an air taxi pilot or a passenger. During the demonstration, a multiple USSP structure is also tested through a partnership with ANRA Technologies and Airbus. This partnership demonstrated decentralized architecture mechanisms and procedures across multiple USSP environments and showcased the deployment of U-space services at all levels by considering the key technologies and capabilities over fully autonomous UASs. Apart from the various services offered, the Cranfield demonstration also explored and tested contingency management procedures for emergency operations and contingency actions. This aspect of the demonstration is carried out in partnership with Boeing Research and Technology Europe. The primary goal of this exercise is to examine how the drone ecosystem can cope with unexpected events, such as technical malfunctions or unforeseen weather conditions, and respond effectively to mitigate the risks associated with such situations. Cranfield demonstration is structured as in Figure 2.
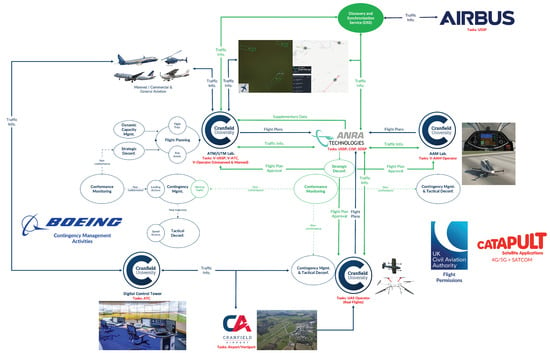
Figure 2.
Cranfield demonstration flow structure.
Cranfield ATM/UTM Lab. acted as a virtual USSP, virtual ATC, and virtual operator for both unmanned and manned flights. For virtual USSP task, a proper traffic management from operation request to landing phase through permanent surveillance of each operation over the whole traffic for safe and efficient flight experience is ensured. This objective is satisfied by integrating the services developed, such as operation plan optimization, risk analysis assistance, dynamic capacity management, strategic conflict resolution, conformance monitoring, contingency management, tactical conflict resolution, and collaborative interface with ATC, into the co-simulation environment developed. Contingency management concept and related activities are developed in collaboration with Boeing Research and Technology Europe. As a virtual ATC, safe coordination between simulated manned/unmanned and real unmanned flights is provided. Lastly, for the virtual operator task, simulated unmanned and manned flights are planned to rehearse the dense traffic environment, which is expected with the future AAM system. The flight plans are generated and operations are conducted by relying on the developed U-space services.
Cranfield Operator is an operator where real flights are conducted. There are two vehicles that are considered for real flights, which are Swift VTOL and Cranfield Multicopter. For safe operations, flight permissions are granted by UK CAA. Additionally, 4G + Satcom communication capabilities are implemented to Multicopter platform in collaboration with Satellite Applications Catapult. All the real operations are planned within the Cranfield Airport. For AAM operations, flights with people onboard are not considered due to safety concerns and flight permissions. On the other hand, commercial flights around the Cranfield Airport are operating as they planned and AAM flights are coordinating with those flights as well.
Cranfield AAM Lab. took the virtual operator role via an AAM simulator. AAM simulator has a six degree of freedom motion platform and VR headsets to provide PICs and/or passengers the full AAM experience. Another feature of AAM simulator is the telemetry module where the simulated vehicle’s telemetry data are pushed to the simulation environment to be coordinated with all the other traffic.
ANRA Technologies is the USSP, common information service provider (CISP), and supplementary data service provider (SDSP) of Cranfield demonstration. Alongside the U-space services, supplementary data such as weather information, obstacles, notice to airmen (NOTAM), terrain, regulations, geozones are provided to enhance the operation safety and efficiency. Also, Airbus is an another USSP during Cranfield demonstrations, which contributes to test the multiple USSP structure. Multi-USSP system communicates through the DSS to share traffic information with each other for providing a safe traffic environment.
Cranfield Digital Tower is the ATC at Cranfield Airport and took part in the demonstration to ensure coordination between real UAS and manned aviation flights. All the permissions on the field are granted by the digital tower. Last but not least, during the demonstration, Cranfield Airport served as both an airport and a vertiport where all the real flights and some of the simulated flights took place.
3.2. Scenarios
The scenarios are defined to satisfy the objectives of the AMU-LED project, such as contingency management, coexistence of different types of vehicles, rerouting capabilities, and so forth. All the Cranfield-related demonstration flights involve real and simulated flights. AAM services on real platforms are performed during the flights. On the other hand, Bedford and Milton Keynes scenarios are all simulation-based scenarios where the fully autonomous advanced AAM service capabilities for both tactical and strategic phases are demonstrated. Demonstration started with Cranfield I scenario, which includes plain flights of the Swift VTOL as an SPV and AAM simulator as an HPV. Bedford scenario comes in next to show the autonomous tactical services for the simulated traffic. Then, in scenario Cranfield IV, a contingency case on HPV and its resolution within the traffic at tactical phase is provided. After that, Milton Keynes scenario comes up, where the strategic services are represented in action on simulated flights. Finally, the scenario Cranfield II is conducted to cover a contingency event on an SPV and resolve its effect for an HPV that is at pre-tactical phase. HPL is used for HPVs and SPL is used for SPVs with respect to the layered airspace structure. The flow between the scenarios is as depicted in Figure 3.
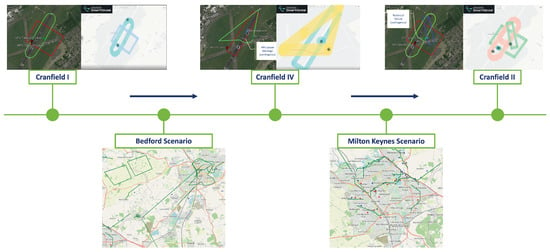
Figure 3.
Scenario flow during the Cranfield demonstration.
Cranfield I: In this scenario, two unmanned aerial vehicles (UAVs), one of them SPV and the other one HPV, are operating in the same airspace, as depicted in Figure 4. The goal of this scenario is to conduct an operation to see how strategic conflict errors are captured and how they can be resolved. The SPV is a Swift VTOL drone colored green, while the HPV is the AAM simulator colored in red. Both the HPV and SPV submitted their respective trajectories, but a strategic conflict error was detected with the SPV trajectory, resulting in its deletion by the operator. A new trajectory was then submitted for the SPV, and both drones connected to the USSP.

Figure 4.
Cranfield I scenario: demonstration of the flight plan update due to a strategic conflict.
The operators of both drones coordinated with each other to take off at the same time. The HPV was set to take off and reach an altitude of 160 m, while the SPV was set to take off and reach an altitude of 120 m. Both drones successfully took off, and the operators continued to monitor the flight progress of each UAV.
At 6 min, the HPV successfully landed, while the SPV successfully landed at 4 min. This scenario was designed to test the ability of the USSP to capture and resolve any strategic conflict errors that may arise during the operation of multiple UAVs in the same airspace.
Overall, this scenario provides a test case to evaluate the capabilities of U-space services and ensure that the necessary safety measures are in place to prevent accidents in the strategic phase and ensure smooth and efficient operation in the airspace.
Bedford: The main objective of the Bedford scenario is to test the in-flight service capabilities for the simulated flights. Several in-flight services, which include conformance monitoring, contingency management, and tactical conflict resolution, are presented for the simulated flights over Bedford and surrounding area. General look at the Bedford scenario from the co-simulation environment is provided in Figure 5. Cargo and mail delivery, shuttle service, and surveillance use cases are tested in Bedford scenario via different simulated SPV and HPV flights.
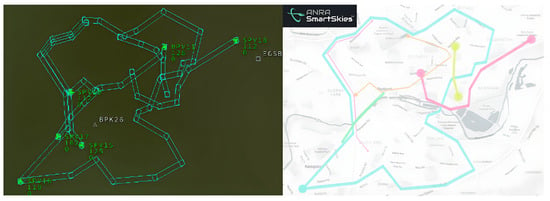
Figure 5.
Bedford scenario: demonstration of the autonomous in-flight services.
The main objective of this scenario is to test autonomous in-flight services on simulated vehicles to maintain the capability of providing safe autonomous operations. There are two dedicated contingency cases that are observed due to non-conformance with their flight plans. Contingencies are identified, proper contingency management actions are taken as emergency landing to the closest feasible location, and safety of the contingent vehicles is provided. Additionally, tactical conflict resolution module is activated for the surrounding traffic to provide safe separation between the contingent vehicles and the rest of the traffic.
Lastly, Figure 6 shows the flight plans of the Bedford scenario with all the considered use cases and the predefined safe and emergency landing zones.
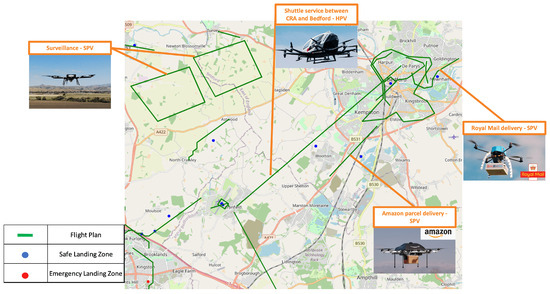
Figure 6.
View of the Bedford scenario with different use cases.
Cranfield IV: In this scenario, two UAVs, known as the SPV and HPV, are operating in the same airspace as provided in Figure 7. The goal of this scenario is to demonstrate how the contingency management service can solve a contingency issue where the SPV is facing a power shortage. The SPV is the Cranfield Multicopter drone colored in green, while the HPV is the AAM simulator colored in red. The closest safe landing zone is shown in blue.
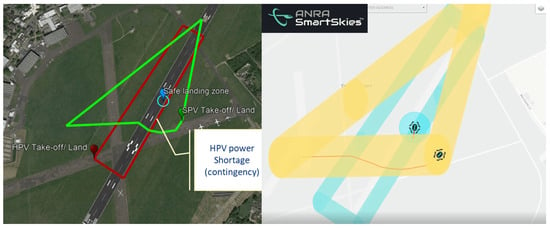
Figure 7.
Cranfield IV scenario: demonstration of a contingency management action and consequent rerouting for conflict resolution.
At the beginning of the scenario, both the SPV and HPV send their flight plans to the airspace. The SPV takes off at 2.2 min and climbs to an altitude of 30 m, while the HPV takes off at and climbs to an altitude of 150 m.
However, at 4.3 min, the HPV experiences a power shortage contingency and begins to descend to an altitude of 60 m. As a result, the contingency management service issues a contingent error and HPV tries to land at the closest safe landing zone.
Meanwhile, the SPV avoids the contingent area to ensure that it does not interfere with the landing of the HPV. Both UAVs safely land at 6.3 min, successfully completing their flight plans.
This scenario highlights the importance of having a contingency management service in place to address unexpected events during UAV operations. In this case, the power shortage contingency issue with the HPV was detected and resolved in real time, ensuring the safety of all UAVs operating in the airspace. Overall, this scenario provides a valuable opportunity to test the capabilities of contingency management service to ensure the safe and efficient operation of multiple drones in the same airspace.
Milton Keynes: The scenario in Milton Keynes mainly focuses on the concept of UAS operations in an urban environment where the pre-flight service capabilities are showcased over the simulated flights. Several strategic-phase U-space services are covered, which include operation plan optimization, risk analysis assistance, dynamic capacity management, and strategic conflict resolution. Co-simulation environment view of the Milton Keynes scenario is as shown in Figure 8. Various use cases are considered for the Milton Keynes area where HPVs conduct missions, such as shuttle services between Milton Keynes and Cranfield and from vertiports defined around Milton Keynes to the shopping center. SPVs, on the other hand, are used in tasks as food delivery, grocery delivery, photography, and surveillance.

Figure 8.
Milton Keynes scenario: demonstration of the pre-flight services.
In this scenario, flight requests, which include the planned departure and landing points, are submitted to the flight planning module. Then, the request is returned with a proper flight plan by going through risk assessment, dynamic capacity management, and strategic conflict resolution modules, respectively.
Finally, Figure 9 depicts the finalized flight plans over Milton Keynes with all the considered use cases and finalized trajectories alongside the defined safe and emergency landing zones.
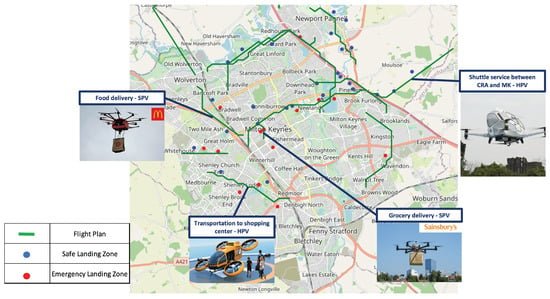
Figure 9.
View of the Milton Keynes scenario with different use cases.
Cranfield II: In this scenario, three UAVs, known as the SPV1, SPV2, and HPV, are operating in the same airspace, as shown in Figure 10. The goal of this scenario is to test what would happen if the SPV1 experiences a technical failure and how the contingency management service would solve this issue. The SPV1 is a Swift VTOL drone colored green, the SPV2 is a multicopter drone colored blue, and the HPV is the AAM simulator colored in red.

Figure 10.
Cranfield II scenario: demonstration of a contingency management action and consequent ground hold for conflict resolution.
At the start of the scenario, both SPV1 and SPV2 submitted their flight plans. SPV1 takes off at and climbs to an altitude of 120 m, while SPV2 takes off at the same time and climbs to an altitude of 30 m. At 2 min, HPV sends its flight plan to the airspace.
SPV1 successfully completes the first tour but experiences a technical problem during the second tour. It fails to turn and continues to fly straight, resulting in a contingent error being issued due to non-conformance. At 2.4 min, HPV attempts to take off but receives an alert about the potential conflict with the malfunctioning SPV1 drone. Therefore, HPV rejects taking off and waits for SPV1 to land.
Then, SPV1 selects the closest and feasible safe landing zone and executes an emergency landing, while HPV continues to wait for SPV1 to safely land. Once SPV1 lands, HPV takes off at 3.1 min and climbs to an altitude of 160 m. Finally, HPV lands at 6.24 min, successfully completing its flight plan.
The scenario demonstrates the significance of implementing a contingency management service to handle technical failures or unforeseen events during UAV operations. This service can swiftly resolve issues in real time, ensuring the safety of all UAVs operating in the airspace.
4. Demonstration Results
This section elaborates on the outcomes of the demonstration. We have defined and analyzed key performance indicators (KPIs), placing emphasis on safety and efficiency metrics. Subsequently, we provide an in-depth analysis of the results we have achieved, correlating them with the objectives of the AMU-LED project. Following this, we explain the social acceptance study conducted for the AAM concept, which tests the public’s perception and readiness for this new mode of transportation. We wrap up by highlighting the practical recommendations derived from the experiences and lessons learned during the demonstration. The aim is to contribute efforts towards actualizing the future AAM concept, ensuring that it is not only technologically sound but also socially accepted and regulated in an appropriate manner.
4.1. KPI Analysis
The KPIs are evaluated based on the available data from both real and simulated flights, as well as video recordings from interfaces that are captured during the demonstration. Flight data for the KPI analysis are obtained from thirty simulated and real flights, where twenty six of them are operated under nominal conditions and four of them are contingent. We employ these data sources to effectively measure and quantify the KPIs, providing an in-depth analysis of the safety and efficiency of the proposed AAM architecture under the AMU-LED project.
The first set of KPIs is relevant to contingency detection and alerting accuracy and time. First, the proportion of UAS contingencies that are correctly identified is examined, and the separation margins are evaluated to determine whether they permit safe separation. Along with that, the quickness of detecting contingencies and the suitability of contingency detection time are explored. The results in Figure 11a indicate that four of the contingent vehicles are identified correctly and with 100% accuracy. There were no issues in labeling non-contingent flights, and the contingency situations are accurately identified. Figure 11b shows the distribution of contingency detection time, and the mean duration of the time difference is observed as 5.5 s, and the standard deviation is calculated as 0.87 s. The reason behind that result is that, for the simulated vehicles, the contingency detection time is five seconds since the non-conformance notifications are received five seconds after the contingent notifications. The non-conformance situation triggers the contingency situations for the simulated vehicles. On the other hand, the contingency situation that occurred on the real vehicle is detected seven seconds after its occurrence and again five seconds after the non-conformance notification. Similar results are observed in contingency alerting accuracy and time. Figure 11c,d depict the confusion matrix of contingency alerting and contingency alerting time distribution, respectively.
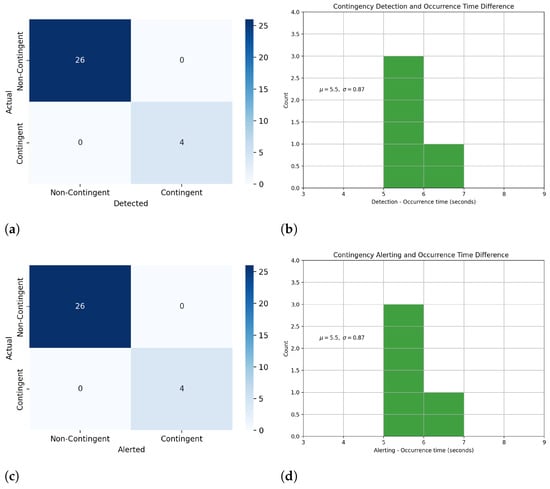
Figure 11.
Analysis on contingency detection and alerting accuracy and time. (a) Confusion matrix for contingency detection. (b) Contingency detection time. (c) Confusion matrix for contingency alerting. (d) Contingency alerting time.
The second set of KPIs focuses on the contingency resolution process and analysis of collision possibilities. First, the rate of contingency events that are correctly resolved is observed as 100%, which corresponds to solving all the contingency events. Then, the resolution times are analyzed for the resolved contingency cases as shown in Figure 12a. The contingency resolution time is defined as the time difference between the vehicle receiving a contingent notification and the contingent vehicle landing to a SELZ. The mean time difference between contingency occurrence and emergency landing is 202.25 s, with a standard deviation of 129.92 s. Also, the type and accuracy of the alerts are discussed as non-conformance and contingent notifications. Both types of deviation alerts are detected properly during each of the four contingency cases observed in the demonstration. For the risk of collision analysis, the purpose is to observe the vehicles flying under the separation minima, especially after a contingency event. The loss of separation distance for tactical conflict resolution to be activated is set as 0.3 nautical miles. As a result, six vehicles with a risk of collision are observed, which are deconflicted afterwards. For the collision distance analysis, pairwise Euclidean distances between all the flight pairs are compared laterally and vertically. The nalysis for pairwise lateral and vertical distances for each second is provided in Figure 12b and Figure 12c, respectively. Because the demonstrations comprise dense traffic to illustrate the contingency scenarios, the mode of the lateral distance distribution is around seven kilometers. A low percentage of the distribution is under the separation minima, corresponding to the aforementioned six flights with collision risks. Finally, we analyze the flight duration of all flight pairs operating in the U-space that have exceeded the separation minima. The distribution of flight times for flight couples within the crucial distance is shown in Figure 12d. The mean duration within the critical distance is found as 62.83 s, with a standard deviation of 27.03 s.
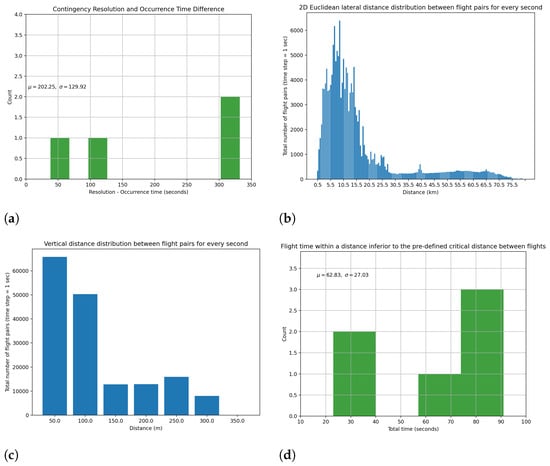
Figure 12.
Analysis on contingency resolution process and collision possibility analysis. (a) Contingency resolution time. (b) Pairwise lateral distance. (c) Pairwise vertical distance. (d) Flight duration within crucial distance.
4.2. Results of the Objectives
The defined objectives for the demonstration play an important role for validating the concepts that are introduced. This part covers the conducted studies and results for each objective specific to the AMU-LED Cranfield demonstration.
Management of prioritized flights: The demonstration successfully prioritized simulated Helicopter Emergency Medical Service (HEMS) operation, ensuring maximum safety by instantly restricting surrounding areas to other vehicles and rerouting impacted flights back to their origin.
Contingency management: The Cranfield demonstration successfully demonstrated contingency management activities for both real and simulated flights. These activities included implementing emergency landings in predefined SELZs. In the demonstration, not only are the vehicle-centric contingency actions for contingent flights considered but the safe reconfiguration of impacted flights is also achieved through effective contingency planning and execution. The semi-controllable or fully controllable contingent flights were guided to pre-defined risk-assessment-based SELZs. The contingency identification relied on conformance monitoring, with USSP notifying the operator of non-conformance and contingent situations. The operator then followed the proper protocols outlined in the AMU-LED Disruption Management Framework for non-nominal operations. This approach allowed the safe reconfiguration of contingent vehicles and surrounding traffic through tactical deconfliction, ensuring the overall safety of the U-space environment.
Coexisting operations among different types of vehicles: The Cranfield demonstration ensures the coexisting flight simulations precisely through flight traceability, facilitated by detailed flight plans and flight log data. The layered airspace structure, which is useful for separating different types of vehicles safely and efficiently, is explored and implemented successfully both in simulated and real flights. In the simulations, intentional abnormalities are also simulated by considering specific events, such as strategic deconfliction failure or contingencies.
Coordination with ATC: Continuous communication with ATC was maintained and flight trajectories were efficiently managed through the Altitude Angel Guardian system and the Swift VTOL vehicle’s onboard ADS-B, enabling real-time tracking of movements and effective data sharing via procedural and collaborative interface services.
Vertiport flow management: A strong emphasis was placed on maintaining safety and preventing unintended incursions or excursions from other UASs during take-off or landing. During Scenario 2 flights, an unexpected civil jet aircraft landing was effectively managed through ATC communication and vertiport management. To avoid mid-air collisions, strategic and tactical deconfliction measures were implemented for the entire traffic.
Beyond Visual Line of Sight flights: The CAA recommends that BVLOS flights over urban areas are not mature enough. Obtaining a permit for the initially proposed flight could exceed a year, which is beyond the project’s timeframe. The BVLOS authorization for Swift aircraft over rural areas was not secured in time for the Cranfield airport flight. As a result, due to these permission constraints, all flights are limited to VLOS operations.
Rerouting capabilities: We demonstrated a successful rerouting process managed by operators, with USSPs alerting them in non-conformance and contingency situations. As a result of operator-led rerouting, mid-air collisions were effectively avoided through tactical deconfliction.
CNS Performance: We showcased the successful implementation and use of U-space services through effective communication, navigation, and surveillance services. The ground control stations of both real and simulated vehicles reliably communicated with the USSP, ensuring uninterrupted telemetry during operations. Navigation services were also utilized effectively, with USSPs notifying or alerting operators in the event of a contingency. Furthermore, surveillance services provided by USSPs facilitated the monitoring, tracking, and identification of all vehicles involved.
Deconfliction by two different USSPs: We demonstrated the pre-flight and in-flight deconfliction between manned and unmanned traffic managed by distinct USSPs and CIS. The USSPs were linked, and the virtual USSP from Cranfield helped to solve any strategic issues by making sure flights were delayed based on a ‘first come, first served’ rule. USSPs were successful in redirecting the flights of conflicting UASs. The USSPs primarily alerted traffic, allowing operators to redirect or reroute their trajectories or take appropriate onboard actions. This effective collaboration between USSPs contributed to the safe and efficient management of airspace during the demonstration.
Architecture: Throughout the Cranfield demonstration, efficient information exchange was maintained between all stakeholders, without any interruptions in the flow of information. All actors received up-to-date and accurate information, ensuring seamless coordination and successful execution of the various AAM business cases presented during the demonstration. The general structure of the Cranfield demonstration is as previously illustrated in Figure 2.
4.3. Social Acceptance
We employed two approaches to assess public perception and potential adoption of UAM: a large-scale survey and a focus group. The main purpose of this social acceptance study is to conduct a qualitative analysis that captures the public’s perception on UAM and to see if the results align with our flight trial outputs rather than a quantitative analysis seeking statistical significance. We would like to clarify that human subjects were not directly involved or used in this study nor affected the outputs of this study. Instead, we solely utilized the anonymized responses of participants to derive the motley of societal views on UAM and to see how our flight results are perceived by the general public.
During the AMU-LED project, we conducted a social acceptance survey with a sample of 500 individuals. The participants were recruited through random sampling, ensuring a diverse representation of age, gender, profession, and socio-economic background. The survey comprised multiple-choice questions to measure UAM’s benefits, drawbacks, safety, noise, and privacy concerns from society’s perspective.
Within the Cranfield demonstrations, we also conducted a focus group to gain in-depth insights into public perceptions of UAM. We assembled a uniformly sampled diverse group of ten individuals, including professionals, students, and retirees from various sectors beyond aerospace and engineering. The participants were recruited to represent diverse backgrounds and opinions. They engaged in a moderated discussion responding to open-ended questions. Open-ended questions are the same as the aforementioned survey questions but without multiple choice.
Figure 13 illustrates all participants’ personal experiences, perceptions of safety, noise acceptance, and privacy concerns regarding drones. The rest of the section combines these results with the face-to-face interviews to provide a qualitative analysis on social acceptance. Details of the methodology, instrument used for the survey, questions, and the detailed quantitative results can be found in [56].
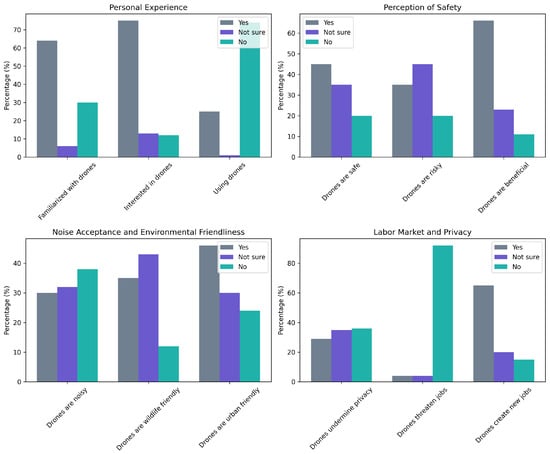
Figure 13.
Quantitative summary of the survey results.
A strong emphasis was placed on having diverse professionals from outside the aerospace and engineering sectors to represent a population unfamiliar with UAM and generalizable to the public. They were interviewed on the main topics of interest:
Personal experience and opinion: All members of the focus group are familiar with drones, but none of them owns one. As a part of their roles, members with security-related professions had worked closely with drone operators. They are optimistic about utilizing drones for emergency, security, or medical purposes. They also support agricultural, industrial, and port tasks. They support delivery drones, but some are skeptical about transporting humans.
Perceptions of safety: Even though the group does not have the technical knowledge to assess whether drones are safe, they think drones pose risks. However, the common belief is to have regulations for drone operations. All members would consider drones safe as long as there are standards. The group has no personal benefit now but is favorable to explore new applications. In addition to the areas mentioned earlier, the group identifies the following benefits: tracking criminals, patrolling for security, overseeing farming areas, overseeing workers to check if they complete tasks correctly, watching wildlife, and controlling wildfires.
Noise acceptance, coexistence with wildlife, and environmental friendliness: Five of the group consider drones as noisy, while others think otherwise. All members believe drones are friendly for wildlife and rural environments if the application conditions are well-defined. Four of the group think drones are urban-friendly. The rest consider that drones have limited capability within urban environments and hence should have specific tasks (ones that serve the community, such as patrolling, fire control, etc.) only. All members agree that drones are environmentally friendly.
Labour market and privacy concerns: The group does not think drones threaten their or society’s jobs. All members agree that drones will create new jobs and commence several sub-industries. They believe the key factor would be determining whether humans or drones are beneficial. They also think the drone industry would trigger a system requiring more specialized and qualified people. The group agrees that urban air mobility will be a valuable technology for intercity transportation, but they are still not convinced that it will oust current mobility technologies. As for privacy, the group would want to know what is flying above and its task. They want to ensure they are not being watched, tracked, or listened to. They believe governments should oversee these operations and guarantee that every operator follows the regulations.
In the light of the findings from our survey and those of prior studies, we conducted a nuanced discussion of public acceptance of UAM and drones. Our survey results echo the findings of [57], with a significant proportion of respondents indicating a willingness to use UAM for airport travel and long-distance recreational trips rather than for commuting. Similarly, we found a strong preference for piloted operations, consistent with the findings of both [57,58]. Interestingly, our survey showed an increased preference for UAM and drone usage among those who had prior exposure or familiarity with these technologies, paralleling the results from [57]. However, unlike the findings in [58], our survey did not reveal a significant concern regarding noise among respondents.
Our survey also indicated a relationship between trust in technology and the intention to use UAM, corroborating the results of [59]. Like the study in [59], we found that perceived usefulness and attitude positively influenced the intention to use UAM, with trust playing a key role in shaping this attitude. Trust, in our study as well as in [59], was primarily influenced by the perceived safety and reliability of UAM technology.
However, our survey results diverge from those in [60] regarding the public acceptance of drones. While the authors of [60] found limited acceptance except for public safety and scientific research applications, our survey showed a wider acceptance among the public for other applications as well, particularly among those familiar with drone technology. Although both our study and the study in [60] revealed concerns about privacy invasion, our survey found that these concerns were mitigated to some extent by increased awareness and understanding of drone technology.
In conclusion, our survey results, combined with previous studies, show that many different factors work together to shape public acceptance of UAM and drones. There is a need for increasing awareness and understanding of these technologies, addressing safety and reliability concerns, and strategically targeting the right use cases for these technologies to foster greater public acceptance. Integrating piloted operations and ensuring high-quality service may also contribute to enhancing public trust and acceptance of UAM and drones.
4.4. Industrial and Regulative Recommendations
In order to ensure the safe and efficient integration of BVLOS operations into airspace, it is crucial for the relevant authorities to establish comprehensive regulations in line with CAP722. By setting clear guidelines for BVLOS operations, authorities will facilitate the development and deployment of advanced UAVs and autonomous operations. In addition, a certification basis is required for all components involved in these operations, including software, hardware, and communication systems. This will provide a standardized framework that ensures safety and reliability across the board.
To further support the growth of BVLOS and autonomous operations, it is essential to designate a permanent flight area or corridor specifically for testing purposes. This dedicated space will enable the industry to develop and refine the technology under controlled conditions while minimizing risks to other airspace users. Moreover, establishing a fully connected interface among all stakeholders, including regulators, manufacturers, and operators, will foster collaboration and information sharing. This interconnected approach will expedite the development of robust, reliable systems and facilitate the safe widespread adoption of BVLOS and autonomous operations in the future.
In terms of CNS, we noted a significant gap in the current system setup when a vehicle loses connection. The proposed architecture has to ensure operational safety for all the traffic. Thus, a redundant communication system or an external monitoring system is a must to track the vehicle and take crucial actions when required. Regarding that, during the Cranfield demonstrations, we were able to track our vehicles via telemetry as a primary system and ADS-B as a secondary system.
For the contingency management actions, we tested a structure where the USSPs are alerting the operators in case of a contingency and the operators are taking the required actions to mitigate contingency risks. Since highly dense traffic is expected with the future AAM concept, an advisory system by USSPs for such actions can be provided to ensure system-wide safety and efficiency.
5. Conclusions
This paper presented a successful demonstration of the AAM concepts that are defined under the AMU-LED project. The Cranfield demonstration supported the AMU-LED project by showcasing the technical feasibility of the proposed solutions. Cranfield tests contributed to satisfy the project objectives, which aim to pave the way for the future AAM concept via the defined novel architecture, and the results are aligned considering the rest of the demonstration activities under AMU-LED. The decentralized AAM concept with a layered airspace structure is validated with multiple USSPs and operators, integrated with the current ATM system within the developed co-simulation environment, and the advanced U-space services are tested within that framework. The demonstration consisted of real and simulated flights interacting with each other via implemented autonomous U-space services in standard and high-performance layers (SPL and HPL). The co-simulation environment that supports AAM operations with a high level of automation is built and used. Virtual autonomous U-space services for both pre-flight and in-flight phases are tested and integrated into the co-simulation environment for demonstration. For contingency management, an autonomous contingency manager is used for the simulated flights. For the real flights, relevant contingency action sets that are obtained through the developed system-wide contingency management framework are followed by the operators. After that, safety- and efficiency-related metrics are analyzed with the demonstration data. The results show the potential of advanced services to enhance the safety and efficiency of AAM operations in the future.
Due to regulatory and safety concerns, we were unable to carry out BVLOS flights. Also, passenger-carrying AAM vehicle operations were not allowed because of similar concerns. Although attempts were undertaken to push the limits by conducting flights within the simulation system for such situations, carrying out real flights could have demonstrated a higher impact not only technically but also from social and economic perspectives. Thus, recommendations for industry and regulatory bodies are provided to help policymakers and U-space stakeholders to establish clear standards and guidelines for the relevant processes in AAM. Emphasis is placed on defining adequate standards for UAS operators to follow to obtain BVLOS certification and operate in BVLOS. Also, the conducted social acceptance survey with a diverse group has provided valuable insights into the public’s perception of AAM. The survey participants from different backgrounds, who are not very familiar with AAM, have shared their thoughts on the possible benefits and drawbacks of AAM and their concerns and expectations regarding safety, security, environmental impact, and privacy.
In the near future, more demonstrations need to take place for increasing the maturity level of AAM and paving the way to integrate it into daily life. In this demonstration, contingency management actions from the operators’ perspective are considered, yet, as a future work, all the action sets defined under the system-wide structure, including every possible stakeholder’s perspective, can be included in the testing efforts. Also, after enhancing the relevant procedures, BVLOS operations for multiple vehicles over urban areas can be tested. Last but not least, after achieving enough maturity on autonomous advanced U-space services for safety purposes, these services can be demonstrated on all real flights.
Author Contributions
Conceptualization, G.I.; methodology, Y.X. and G.I.; software, A.T.A., M.H., E.S., G.G., R.F., Y.T., P.B. and Y.S.; validation, A.T.A., M.H., E.S., G.G., R.F., Y.T., P.B., Y.S., J.A.T. and C.N.; formal analysis, A.T.A. and Y.T.; investigation, A.T.A., M.H., E.S., G.G., M.U., R.F., Y.T., P.B., Y.S., Y.X., G.I., M.W.H., A.F., A.M., J.A.T., C.N., M.V., M.T., V.G., P.M. and A.G.; resources, Y.X. and G.I.; data curation, A.T.A., M.H., E.S., G.G., R.F. and Y.T.; writing—original draft preparation, A.T.A.; writing—review and editing, A.T.A., M.H., E.S., G.G., M.U., R.F., Y.T., P.B., Y.S., Y.X., G.I., M.W.H., A.F., A.M., J.A.T., C.N., M.V., M.T., V.G., P.M. and A.G.; visualization, A.T.A., M.H., R.F. and P.B.; supervision, Y.X., G.I. and M.W.H.; project administration, Y.X., G.I., A.F., A.M., M.V., M.T., V.G., P.M. and A.G.; funding acquisition, G.I., A.F., A.M., M.V., M.T., V.G., P.M. and A.G. All authors have read and agreed to the published version of the manuscript.
Funding
This work has been funded by the SESAR JU under grant agreement No. 101017702 as part of the European Union’s Horizon 2020 research and innovation programme: AMU-LED (Air Mobility Urban-Large Experimental Demonstrations).
Data Availability Statement
The reporting on all the activities and data analysis available for public release, as granted by European Commission following grant agreement No. 101017702 for the AMU-LED project, can be found at https://cordis.europa.eu/project/id/101017702 (accessed on 31 July 2023).
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AAM | Advanced Air Mobility |
| AMU-LED | Air Mobility Urban-Large Experimental Demonstration |
| ANSP | Air Navigation Service Provider |
| ATC | Air Traffic Control |
| ATM | Air Traffic Management |
| BVLOS | Beyond Visual Line of Sight |
| CAA | Civil Aviation Authority |
| CISP | Common Information Service Provider |
| DSS | Discovery and Synchronization Service |
| HEMS | Helicopter Emergency Medical Service |
| HPV | High-Performing Vehicle |
| HPL | High-Performance Layer |
| KPI | Key Performance Indicator |
| NOTAM | Notice to Airmen |
| PIC | Pilot in Command |
| SDSP | Supplementary Data Service Provider |
| SELZ | Safe and Emergency Landing Zone |
| SESAR JU | The Single European Sky ATM Research Joint Undertaking |
| SPV | Standard-Performing Vehicle |
| SPL | Standard-Performance Layer |
| UAM | Urban Air Mobility |
| UAS | Unmanned Aircraft System |
| UAV | Unmanned Aerial Vehicle |
| UK | United Kingdom |
| USSP | U-space Service Provider |
| UTM | UAS Traffic Management |
| VLD | Very Large Demonstration |
| VLL | Very Low Level |
| VR | Virtual Reality |
| VTOL | Vertical Take-Off and Landing |
References
- Federal Aviation Administration NextGen. Urban Air Mobility (UAM) Concept of Operations v1.0; Technical Report; FAA: Washington, DC, USA, 2020.
- Federal Aviation Administration NextGen. Unmanned Aircraft System (UAS) Traffic Management (UTM) Concept of Operations v2.0; Technical Report; FAA: Washington, DC, USA, 2020.
- Price, G.; Helton, D.; Jenkins, K.; Kvicala, M.; Parker, S.; Wolfe, R.; Miranda, F.A.; Goodrich, K.H.; Xue, M.; Cate, K.T.; et al. Urban Air Mobility Operational Concept (OpsCon) Passenger-Carrying Operations; NASA: Hampton, VA, USA, 2020.
- Boeing; Wisk. Concept of Operations for Uncrewed Urban Air Mobility; Technical report; The Boeing Company: Arlington, VA, USA, 2022; Available online: https://www.boeing.com/resources/boeingdotcom/innovation/con-ops/docs/Concept-of-Operations-for-Uncrewed-Urban-Air-Mobility.pdf (accessed on 31 July 2023).
- Balakrishnan, K.; Polastre, J.; Mooberry, J.; Golding, R.; Sachs, P. Blueprint for the Sky: The Roadmap for the Safe Integration of Autonomous Aircraft; Airbus UTM: San Francisco, CA, USA, 2018. [Google Scholar]
- Airservices Australia and Embraer Business Innovation Center. Urban Air Traffic Management Concept of Operations v1.0; Technical Report; Airservices Australia and Embraer Business Innovation Center: Canberra, Australia, 2020. [Google Scholar]
- UK Research and Innovation. Future Flight Vision and Roadmap; Technical Report; UKRI: Swindon, UK, 2021.
- CORUS. U-Space Concept of Operations ed 03.00.02; Technical Report; SESAR JU: Brussels, Belgium, 2019. [Google Scholar]
- CORUS XUAM. U-Space Conops ed 03.10; Technical Report; SESAR JU: Brussels, Belgium, 2022. [Google Scholar]
- SESAR JU. U-Space Blueprint; Technical Report; SESAR JU: Brussels, Belgium, 2017. [Google Scholar]
- European Union Aviation Safety Agency. Study on the Societal Acceptance of Urban Air Mobility in Europe; Technical Report; EASA: Cologne, Germany, 2021.
- Doole, M.; Ellerbroek, J.; Knoop, V.L.; Hoekstra, J.M. Constrained urban airspace design for large-scale drone-based delivery traffic. Aerospace 2021, 8, 38. [Google Scholar] [CrossRef]
- AIRPASS. On-Board System Concept Evaluation and Feasibility Analysis d4.1; Technical Report; SESAR JU: Brussels, Belgium, 2020. [Google Scholar]
- AIRPASS. Final Project Results Report d4.2; Technical Report; SESAR JU: Brussels, Belgium, 2020. [Google Scholar]
- PercEvite. Final Activity Report d5.2; Technical Report; SESAR JU: Brussels, Belgium, 2020. [Google Scholar]
- USIS. Study Report d2.2; Technical Report; SESAR JU: Brussels, Belgium, 2020. [Google Scholar]
- SECOPS. Final Project Results Report d5.5; Technical Report; SESAR JU: Brussels, Belgium, 2019. [Google Scholar]
- DroC2om. Overall System Architecture d2.2; Technical Report; SESAR JU: Brussels, Belgium, 2018. [Google Scholar]
- CLASS. Definition of the Cooperative and Uncooperative Surveillance Systems d2.1; Technical Report; SESAR JU: Brussels, Belgium, 2018. [Google Scholar]
- TERRA. Final Project Results Report d7.1; Technical Report; SESAR JU: Brussels, Belgium, 2020. [Google Scholar]
- IMPETUS. Final Project Results Report d6.3; Technical Report; SESAR JU: Brussels, Belgium, 2020. [Google Scholar]
- DREAMS. Final Project Results Report d2.2; Technical Report; SESAR JU: Brussels, Belgium, 2019. [Google Scholar]
- BUBBLES. Final Project Results Report d1.5; Technical Report; SESAR JU: Brussels, Belgium, 2022. [Google Scholar]
- DACUS. Drone dcb Concept and Process d1.1; Technical Report; SESAR JU: Brussels, Belgium, 2021. [Google Scholar]
- ICARUS. Simulation Trials Data Analysis Results d6.3; Technical Report; SESAR JU: Brussels, Belgium, 2022. [Google Scholar]
- USEPE. Final Project Results Report d2.3; Technical Report; SESAR JU: Brussels, Belgium, 2022. [Google Scholar]
- Metropolis 2. Concept Design Report d4.1; Technical Report; SESAR JU: Brussels, Belgium, 2021. [Google Scholar]
- TINDAIR. SESAR JU, 2022. Available online: https://www.sesarju.eu/projects/TINDAIR (accessed on 12 March 2023).
- AURA. Solution 2 Initial Concept Description d3.1; Technical Report; SESAR JU: Brussels, Belgium, 2021. [Google Scholar]
- GOF USPACE. Summary Flight Information Management System (FIMS) Design and Architecture; Technical Report; SESAR JU: Brussels, Belgium, 2020. [Google Scholar]
- GOF2.0 USPACE. Critical Design Document (CDD) and Architecture Blueprint d2.1; Technical Report; SESAR JU: Brussels, Belgium, 2022. [Google Scholar]
- DOMUS. Final Study Report d5.2; Technical Report; SESAR JU: Brussels, Belgium, 2020. [Google Scholar]
- GEOSAFE. Study Report d7.1; Technical Report; SESAR JU: Brussels, Belgium, 2019. [Google Scholar]
- PODIUM. Demonstration Report d1.2; Technical Report; SESAR JU: Brussels, Belgium, 2019. [Google Scholar]
- SAFIR-Med. Demo Plan d2.1; Technical Report; SESAR JU: Brussels, Belgium, 2022. [Google Scholar]
- Lappas, V.; Zoumponos, G.; Kostopoulos, V.; Lee, H.I.; Shin, H.S.; Tsourdos, A.; Tantardini, M.; Shomko, D.; Munoz, J.; Amoratis, E.; et al. EuroDRONE, a European unmanned traffic management testbed for U-space. Drones 2022, 6, 53. [Google Scholar] [CrossRef]
- DIODE. SESAR JU, 2020. Available online: https://www.sesarju.eu/node/3200 (accessed on 12 March 2023).
- Uspace4UAM. SESAR JU, 2022. Available online: https://www.sesarju.eu/projects/Uspace4UAM (accessed on 12 March 2023).
- VUTURA. SESAR JU, 2020. Available online: https://www.sesarju.eu/projects/vutura (accessed on 12 March 2023).
- Thipphavong, D.P.; Apaza, R.; Barmore, B.; Battiste, V.; Burian, B.; Dao, Q.; Feary, M.; Go, S.; Goodrich, K.H.; Homola, J.; et al. Urban air mobility airspace integration concepts and considerations. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; p. 3676. [Google Scholar]
- Northeast UAS Airspace Integration Research Alliance. Advanced Air Mobility (AAM) Vertiport Automation Trade Study; Northeast UAS Airspace Integration Research Alliance: Syracuse, NY, USA, 2020. [Google Scholar]
- Northeast UAS Airspace Integration Research Alliance. High-Density Automated Vertiport Concept of Operations; Northeast UAS Airspace Integration Research Alliance: Syracuse, NY, USA, 2021. [Google Scholar]
- Stouffer, V.L.; Cotton, W.B.; DeAngelis, R.A.; Devasirvatham, D.M.; Irvine, T.B.; Jennings, R.E.; Lehmer, R.D.; Nguyen, T.C.; Shaver, M.A.; Bakula, C.J. Reliable, Secure, and Scalable Communications, Navigation, and Surveillance (CNS) Options for Urban Air Mobility (UAM); Science Applications International Corporation: Reston, VA, USA, 2020. [Google Scholar]
- Goodrich, K. Automated Flight and Contingency Management, NASA Advanced Air Mobility (AAM) Project. In Proceedings of the AAM Ecosystem Aircraft Work Group, Virtual, 3 August 2020. [Google Scholar]
- Darmstadt, P.R.; Catanese, R.; Beiderman, A.; Dones, F.; Chen, E.; Mistry, M.P.; Babie, B.; Beckman, M.; Preator, R. Hazards Analysis and Failure Modes and Effects Criticality Analysis (FMECA) of Four Concept Vehicle Propulsion Systems; Technical Report; NASA: Hampton, VA, USA, 2019. [Google Scholar]
- Rimjha, M.; Li, M.; Hinze, N.; Tarafdar, S.; Hotle, S.; Swingle, H.; Trani, A.; Smith, J.C. Demand Forecast Model Development and Scenarios Generation for Urban Air Mobility Concepts; Virginia Tech Air Transportation Systems Laboratory: Blacksburg, VA, USA, 2020. [Google Scholar]
- Pascioni, K.A.; Watts, M.E.; Houston, M.; Lind, A.; Stephenson, J.H.; Bain, J. Acoustic flight test of the joby aviation advanced air mobility prototype vehicle. In Proceedings of the 28th AIAA/CEAS Aeroacoustics 2022 Conference, Southampton, UK, 14–17 June 2022; p. 3036. [Google Scholar]
- Federal Aviation Administration. UAS Test Site Program. 2023. Available online: https://www.faa.gov/uas/programs_partnerships/test_sites (accessed on 2 August 2023).
- Vantis. North Dakota UAS Network. Available online: https://www.vantisuas.com/ (accessed on 2 August 2023).
- Fremond, R.; Tang, Y.; Bhundoo, P.; Su, Y.; Altun, A.T.; Xu, Y.; Inalhan, G. Demonstrating advanced u-space services for urban air mobility in a co-simulation environment. In Proceedings of the SIDs2022: 12th SESAR Innovation Days, Budapest, Hungary, 5–8 December 2022. [Google Scholar]
- AMU-LED. Disruption Management Framework for Non-Nominal Operations Affecting the Operator d3.4; Technical Report; SESAR JU: Brussels, Belgium, 2022. [Google Scholar]
- Altun, A.T.; Xu, Y.; Inalhan, G.; Vidal-Franco, I.; Hardt, M. Contingency management concept generation for u-space system. In Proceedings of the 2022 Integrated Communication, Navigation and Surveillance Conference (ICNS), Dulles, VA, USA, 5–7 April 2022; IEEE: New York, NY, USA; pp. 1–12. [Google Scholar]
- AMU-LED. High Level Conops d2.2; Technical Report; SESAR JU: Brussels, Belgium, 2022. [Google Scholar]
- AMU-LED. Results of the Flight Demonstration Report (Demor) d6.2; Technical Report; SESAR JU: Brussels, Belgium, 2022. [Google Scholar]
- Tojal, M.; Hesselink, H.; Fransoy, A.; Ventas, E.; Gordo, V.; Xu, Y. Analysis of the definition of Urban Air Mobility—How its attributes impact on the development of the concept. Transp. Res. Procedia 2021, 59, 3–13. [Google Scholar] [CrossRef]
- AMU-LED. UAM Services, Safety and Social Acceptance Analysis; Technical Report; SESAR JU: Brussels, Belgium, 2023. [Google Scholar]
- Shaheen, S.; Cohen, A.; Farrar, E. The Potential Societal Barriers of Urban Air Mobility (UAM); NASA: Washington, DC, USA, 2018; pp. 1–115.
- Eißfeldt, H.; Biella, M. The public acceptance of drones—Challenges for advanced aerial mobility (AAM). Transp. Res. Procedia 2022, 66, 80–88. [Google Scholar] [CrossRef]
- Kim, Y.W.; Lim, C.; Ji, Y.G. Exploring the User Acceptance of Urban Air Mobility: Extending the Technology Acceptance Model with Trust and Service Quality Factors. Int. J. Hum.–Comput. Interact. 2023, 39, 2893–2904. [Google Scholar] [CrossRef]
- Aydin, B. Public acceptance of drones: Knowledge, attitudes, and practice. Technol. Soc. 2019, 59, 101180. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).