
LoRa-Based Low-Cost Nanosatellite for Emerging Communication Networks in Complex Scenarios





Abstract
:1. Introduction
2. State of the Art
Our Contribution
- Design and manufacturing of an autonomous CubeSat, base station and pilot station;
- Election and measurement of electronic devices for the efficient performance of the system;
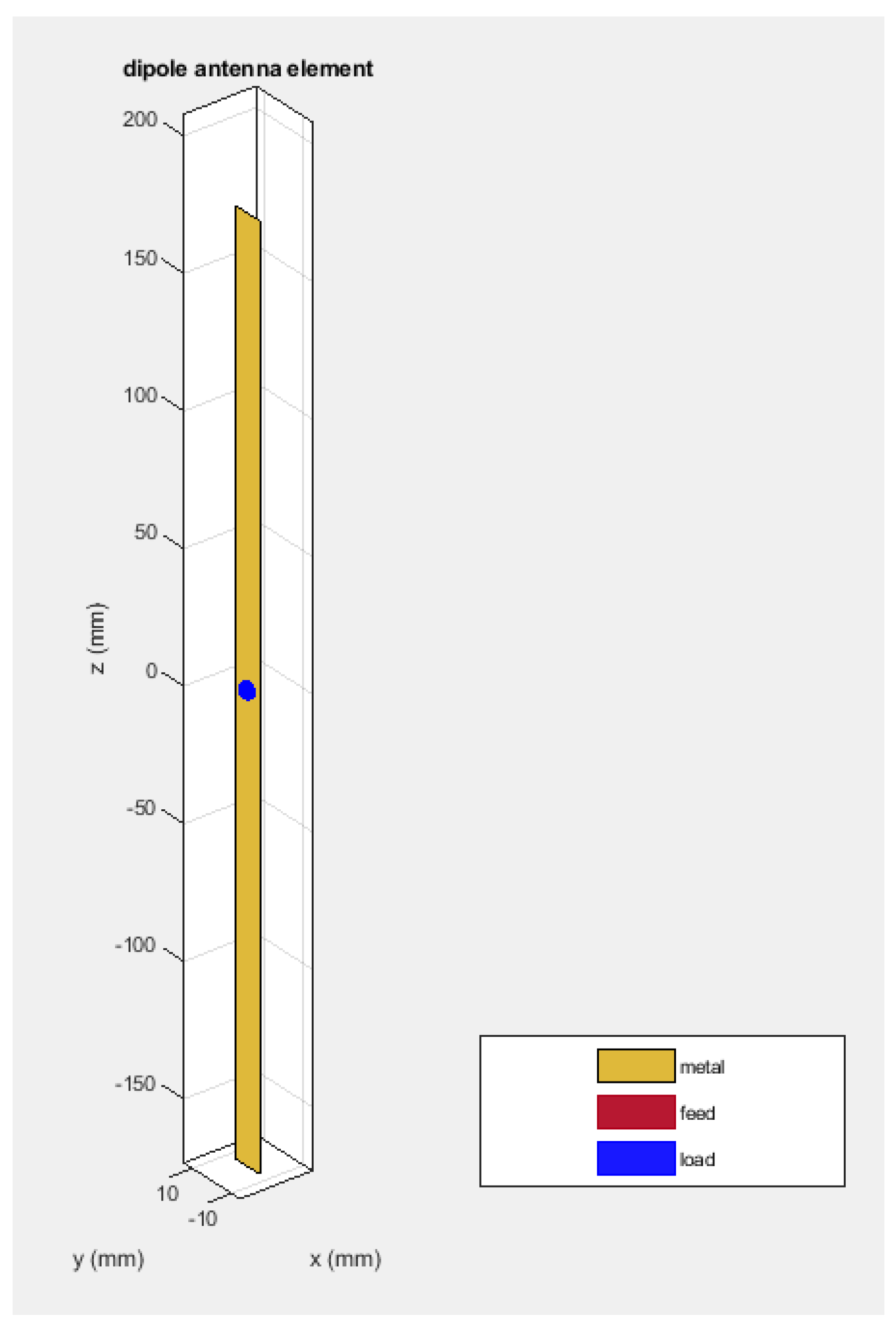
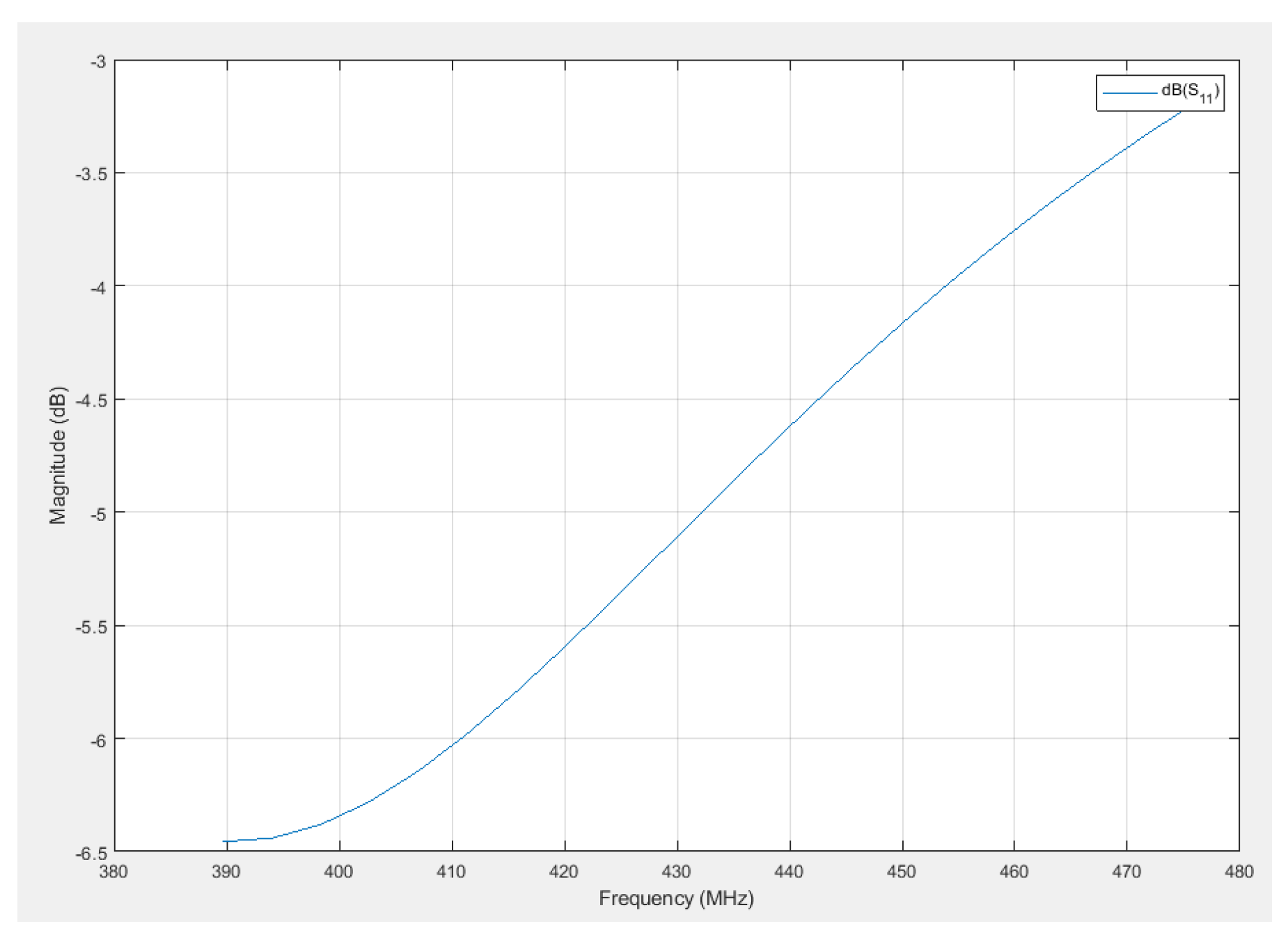
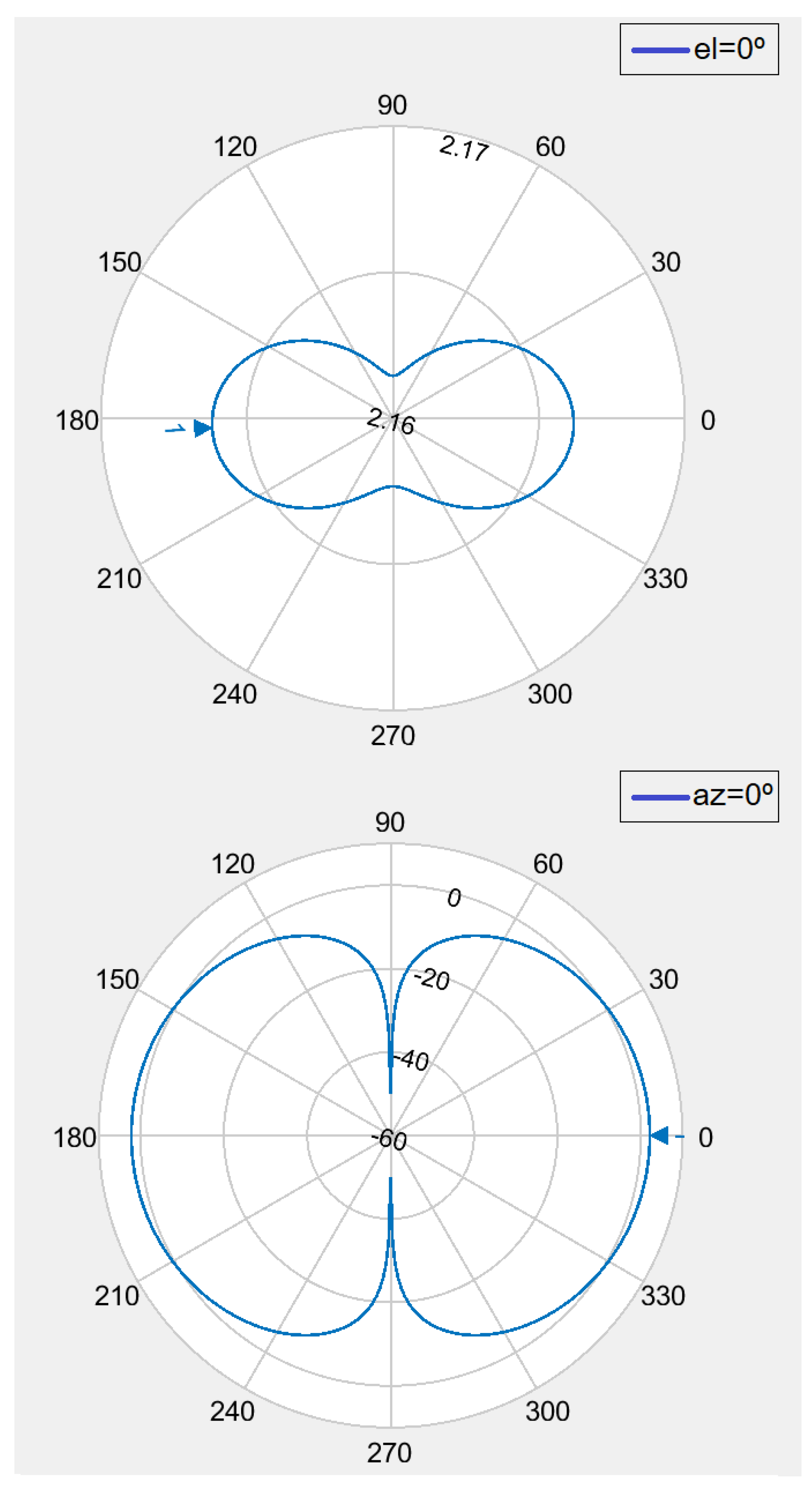
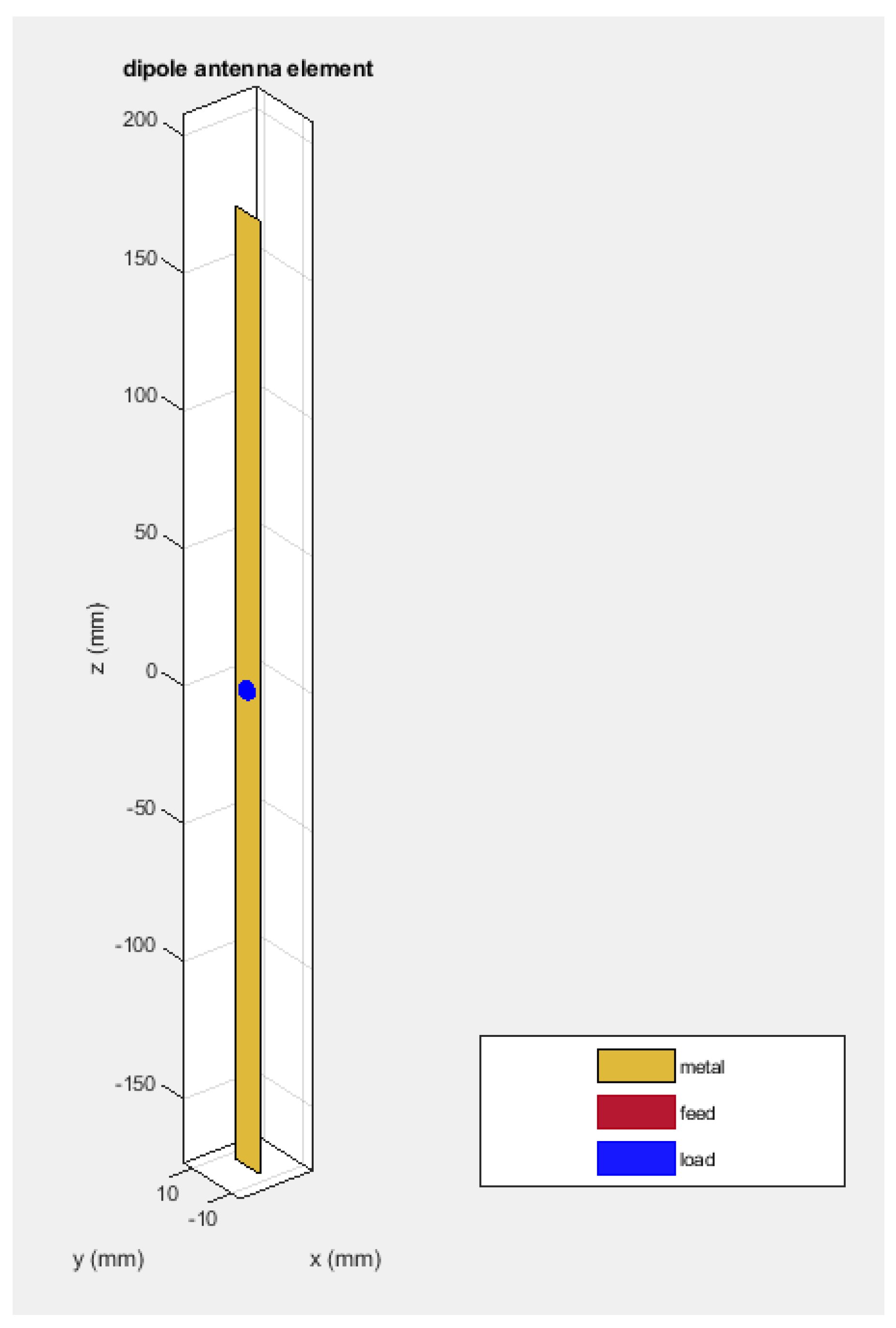
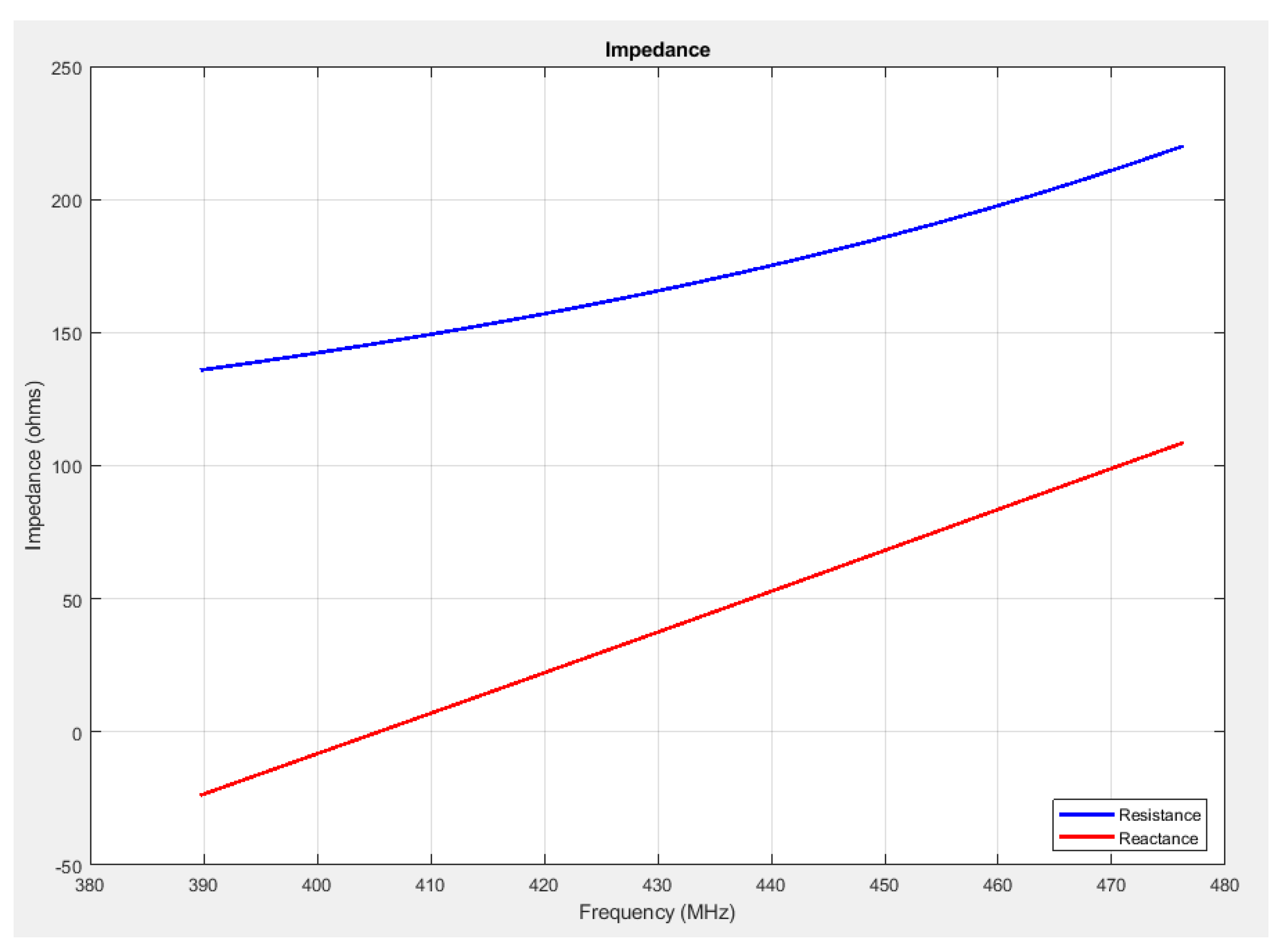
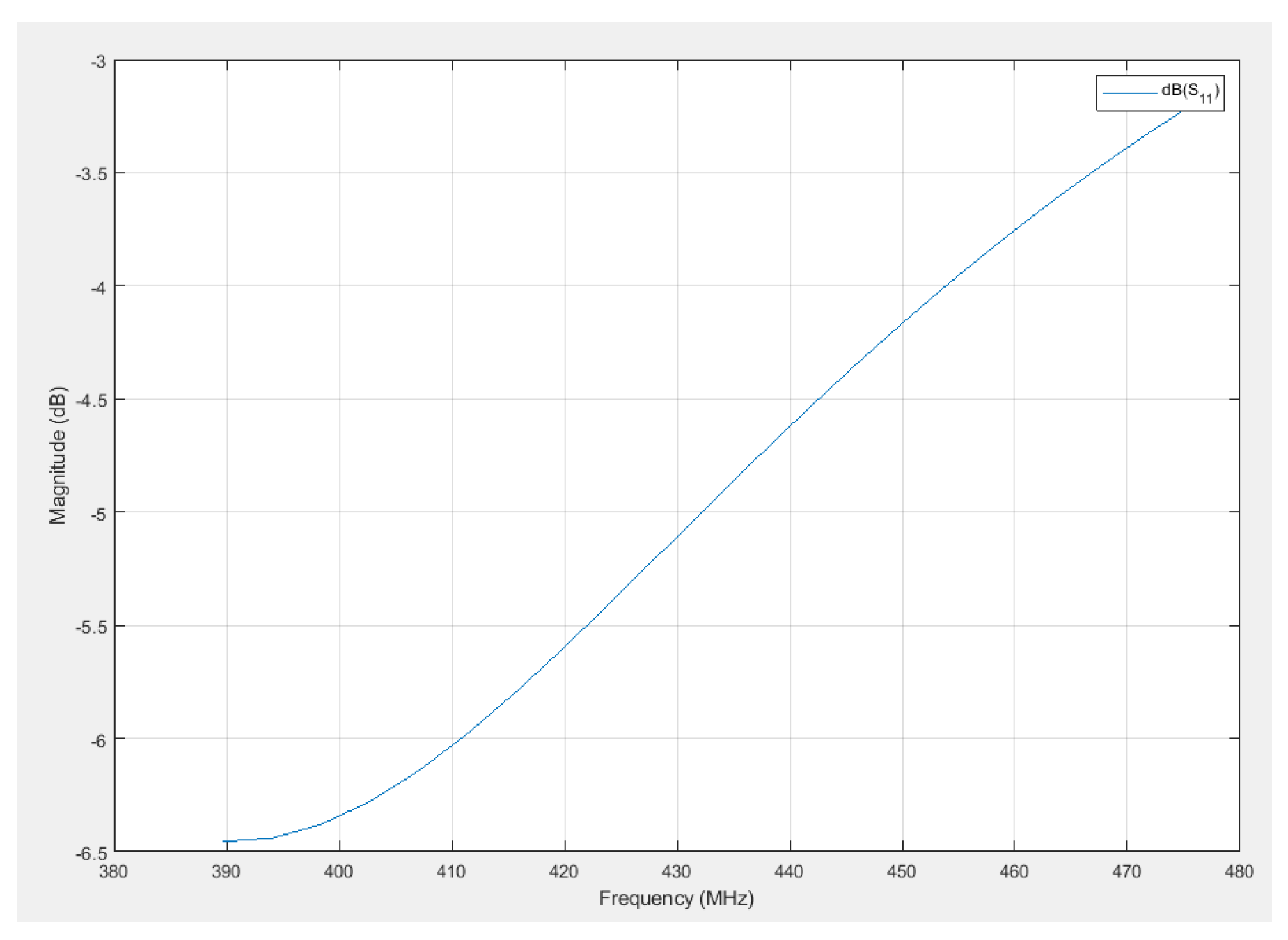
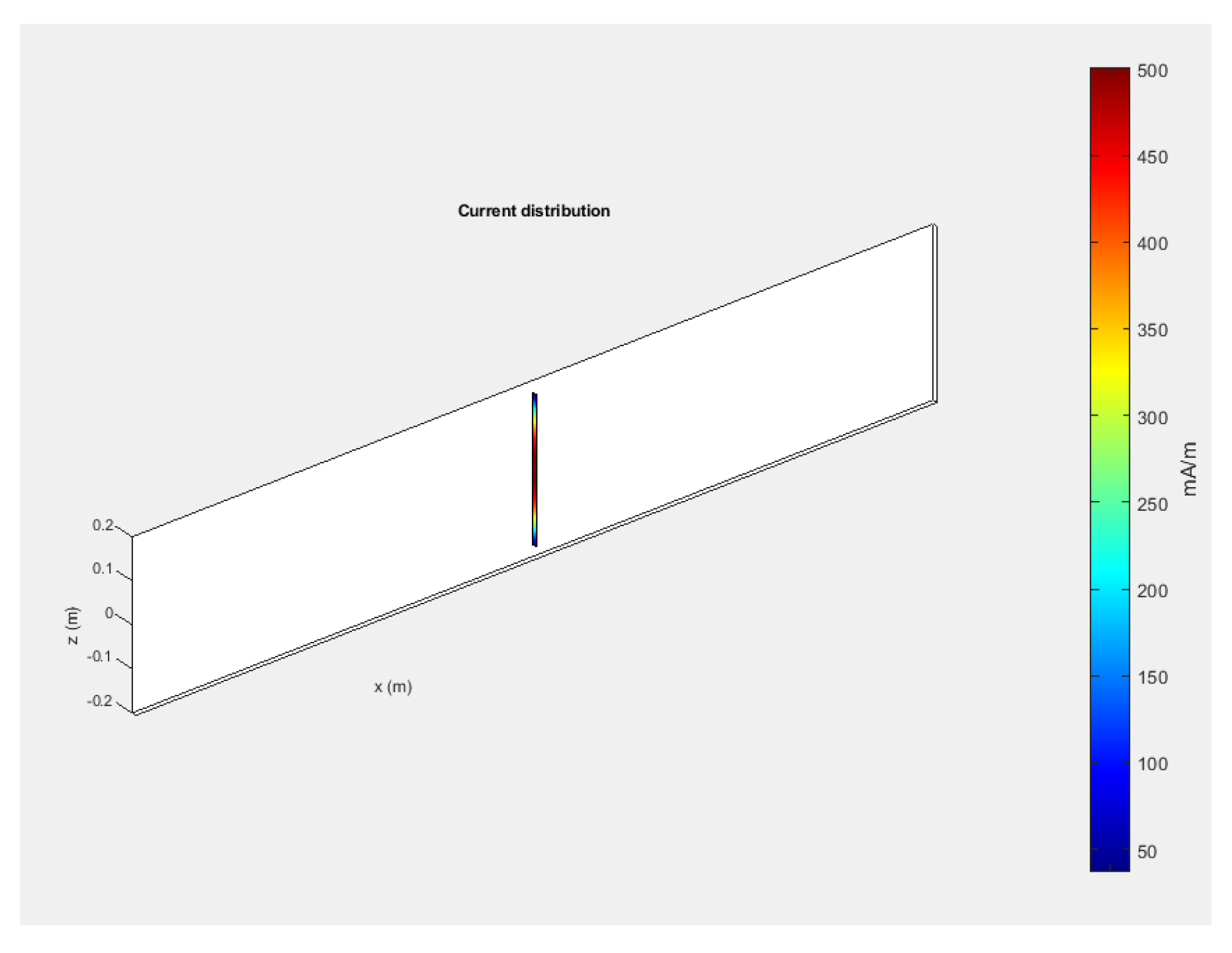
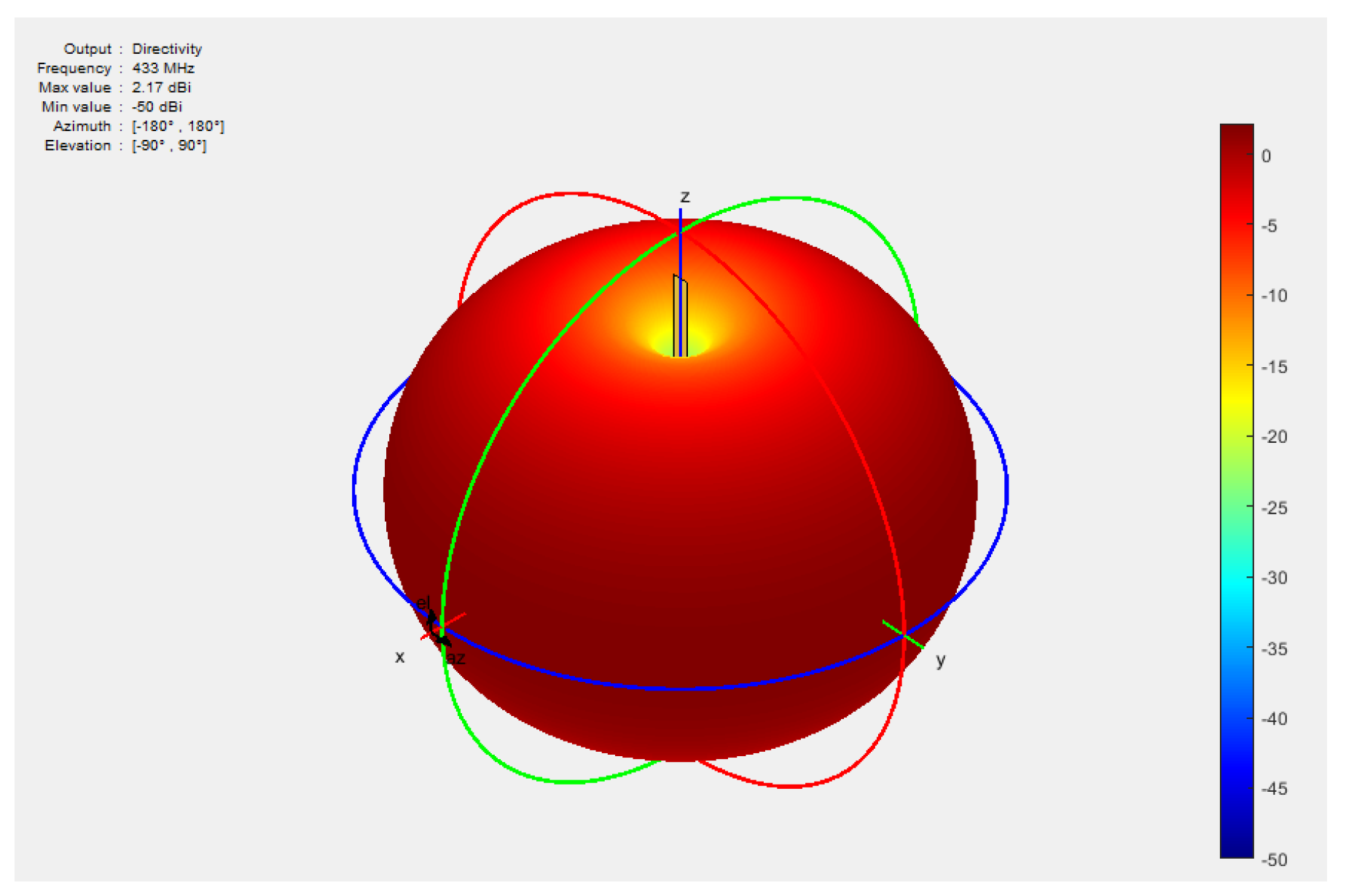
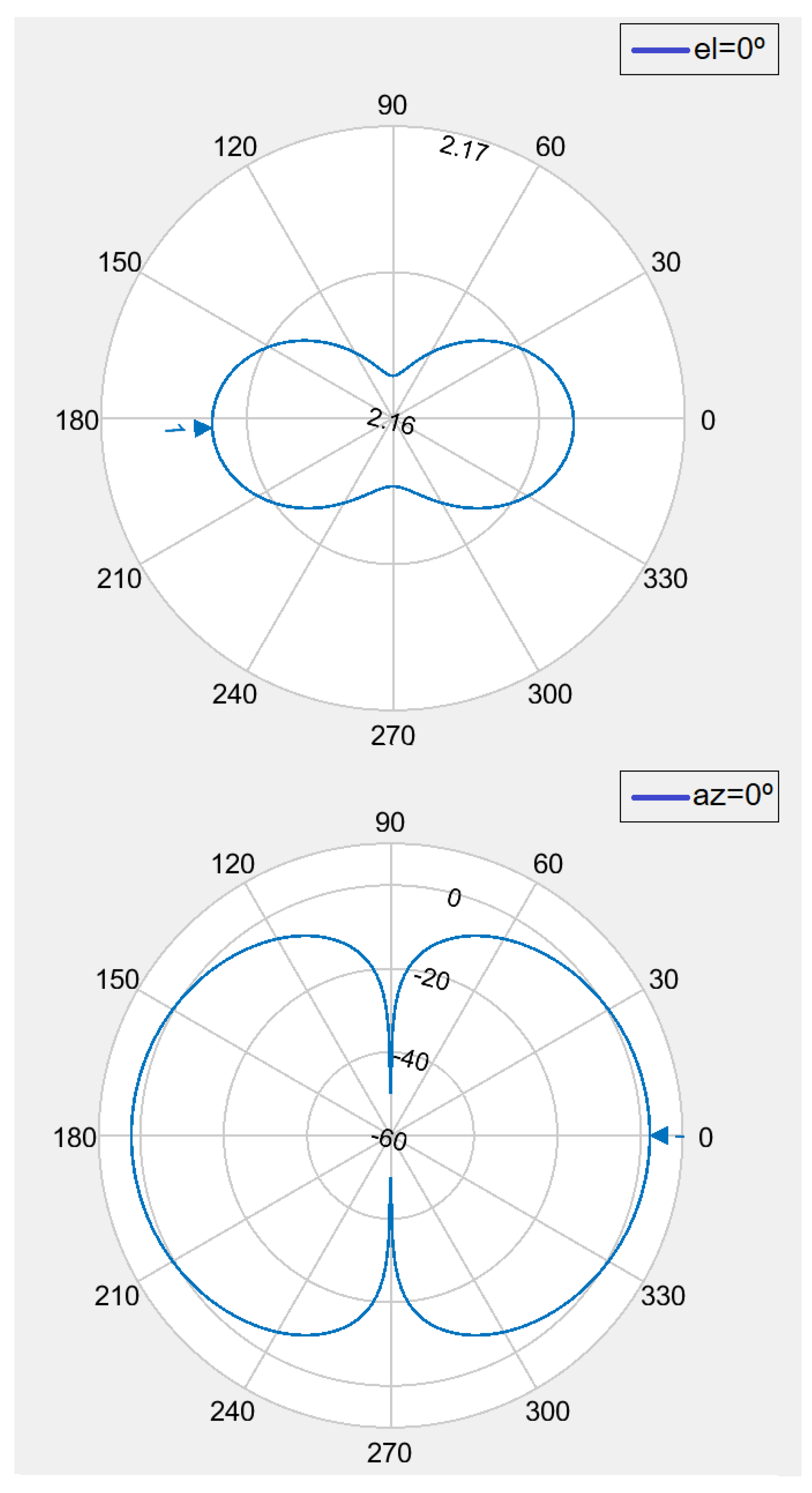
- Design, simulation, and test of a dipole antenna;
- Management of legal rights and checking the weather forecast to launch the CubeSat locally;
- Collection of sensor data and their visualization in a web-based environment;
- Performance of LoRa communication experiments in an open environment.
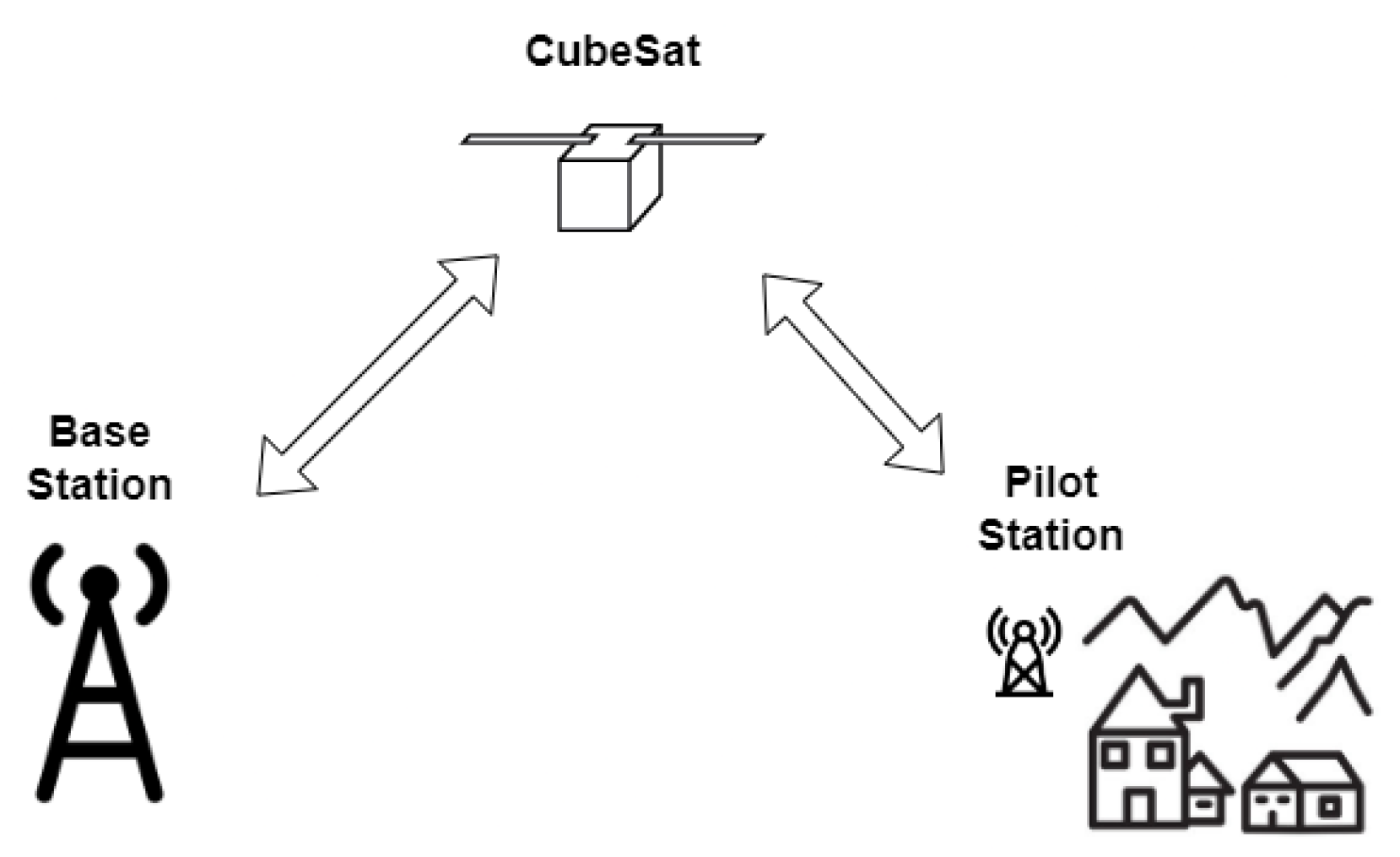
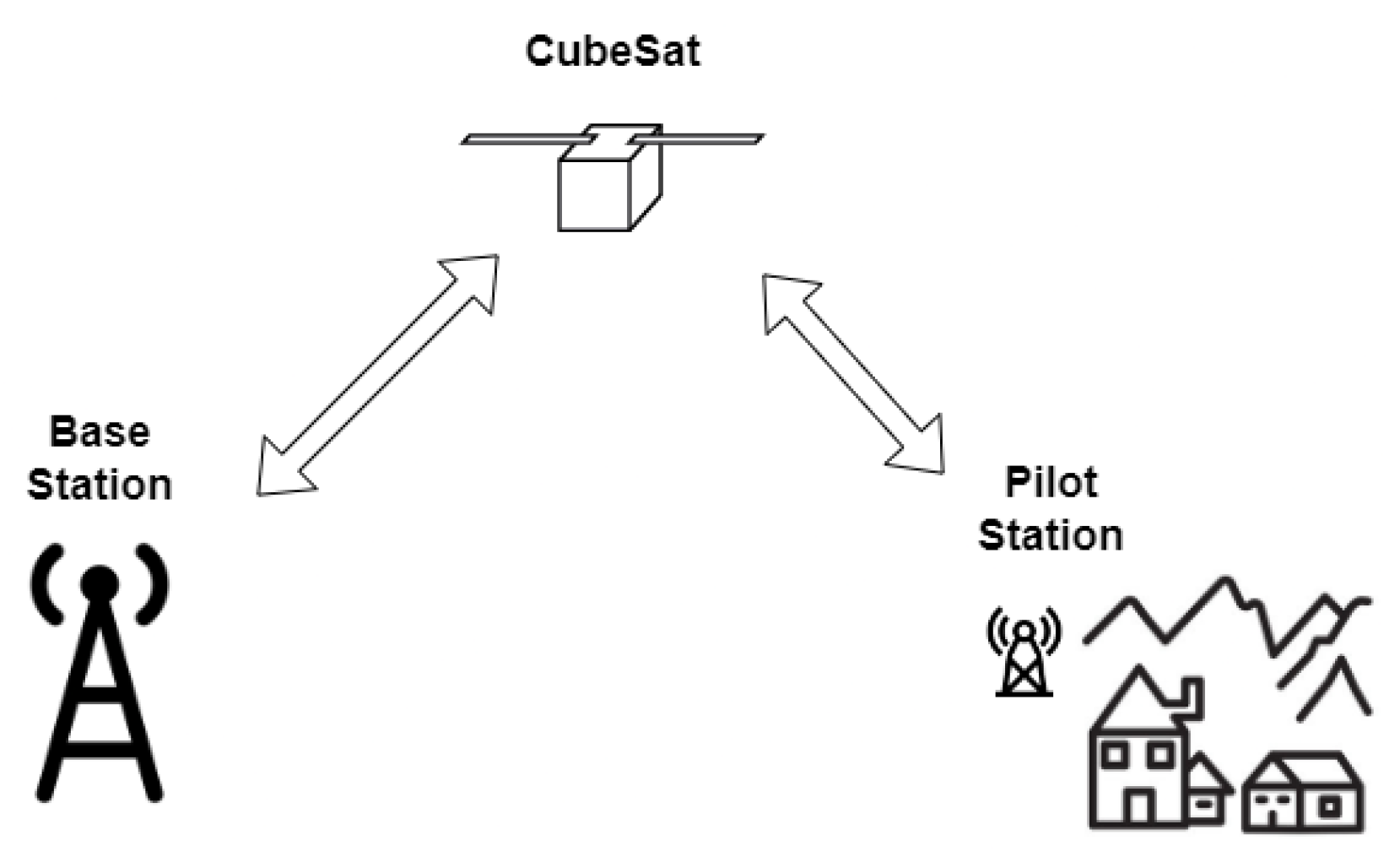
3. System Description
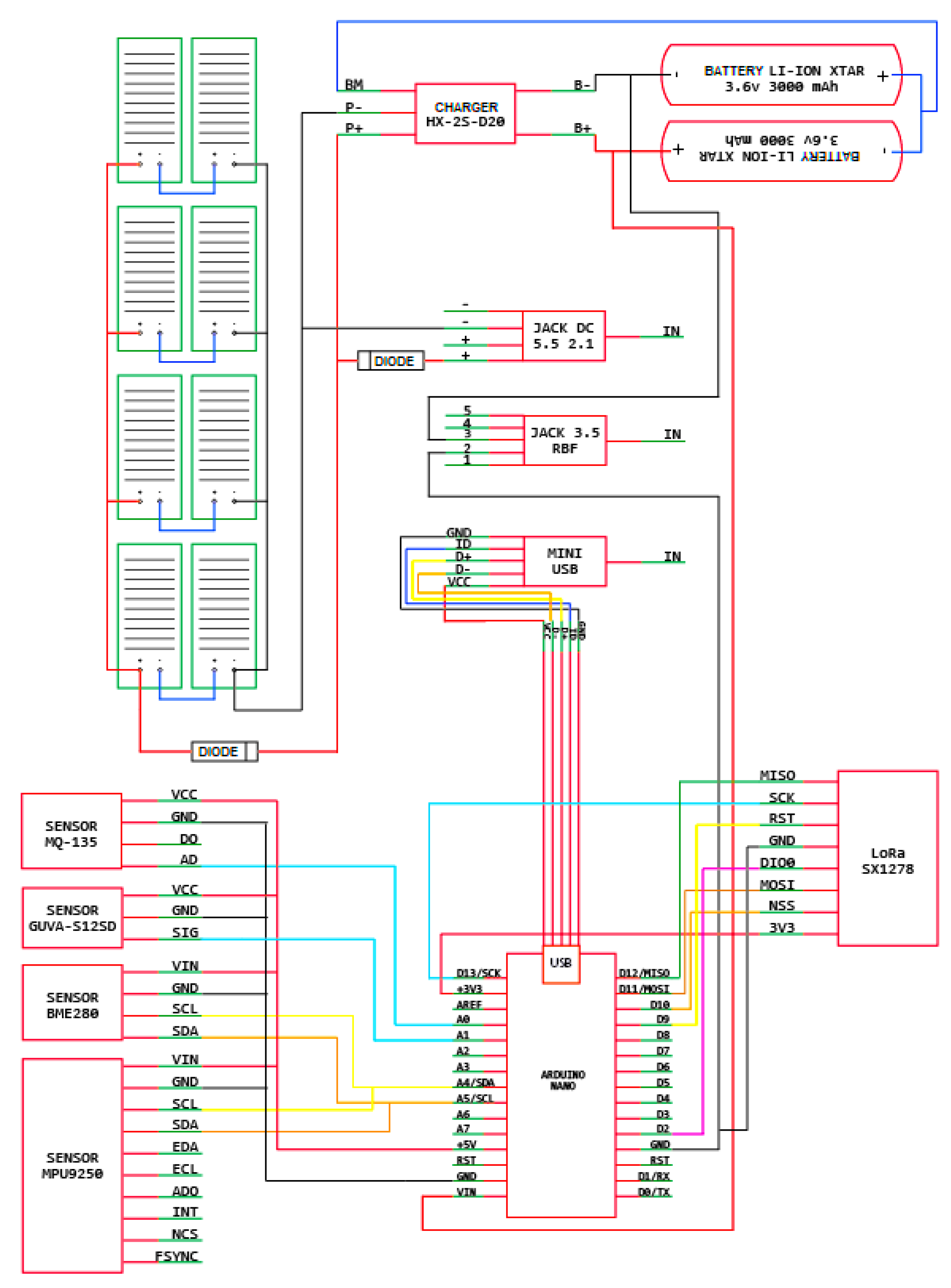
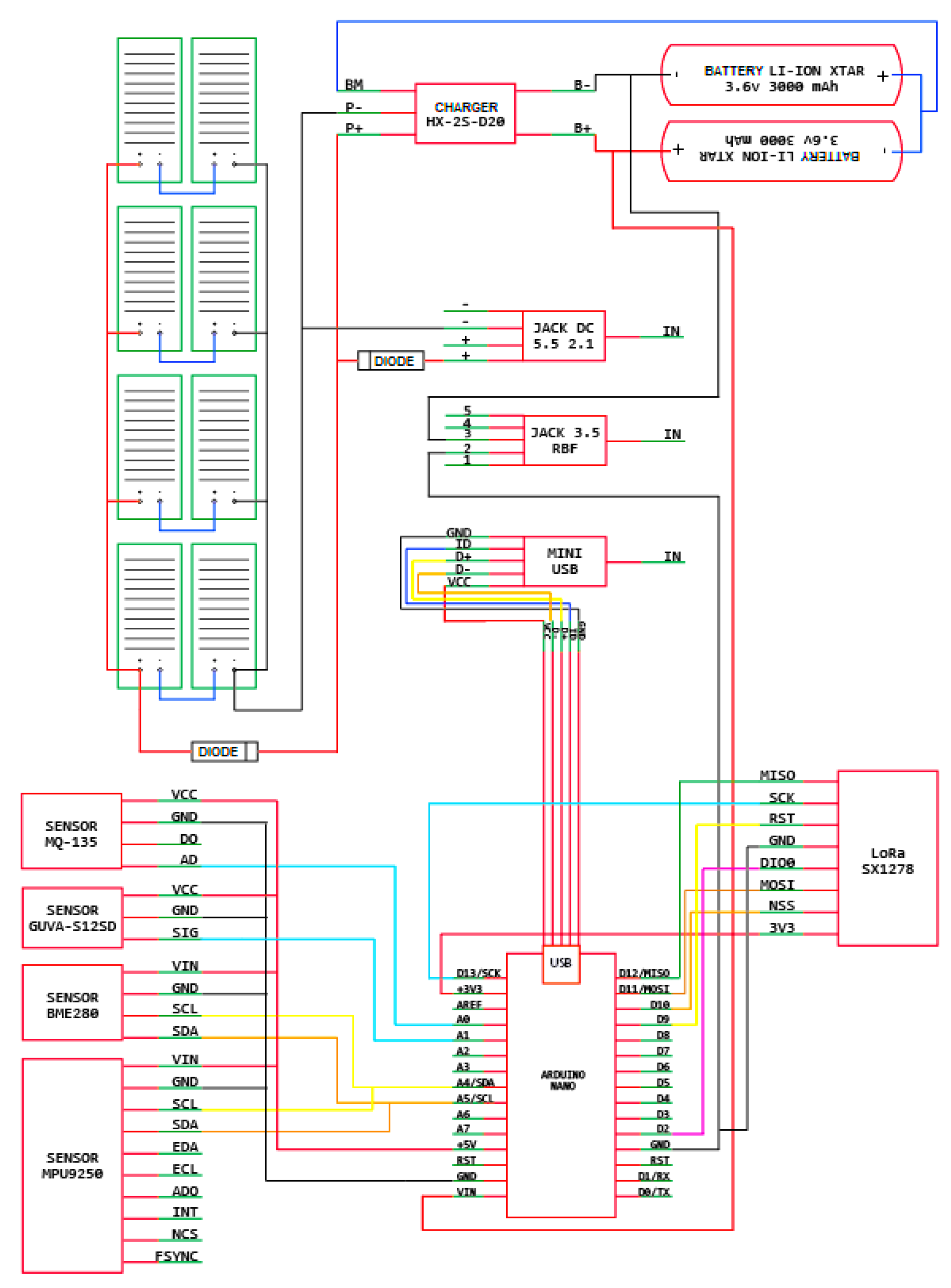
3.1. CubeSat
- Sensor reading: Receives the values of the analog and digital inputs of the microcontroller to process them. Taking into account the selected microcontroller and its capabilities, the reading process for different kinds of sensors is supported.
- Communication: Responsible for receiving and sending communication data between the CubeSat and the terrestrial stations through LoRa modules.
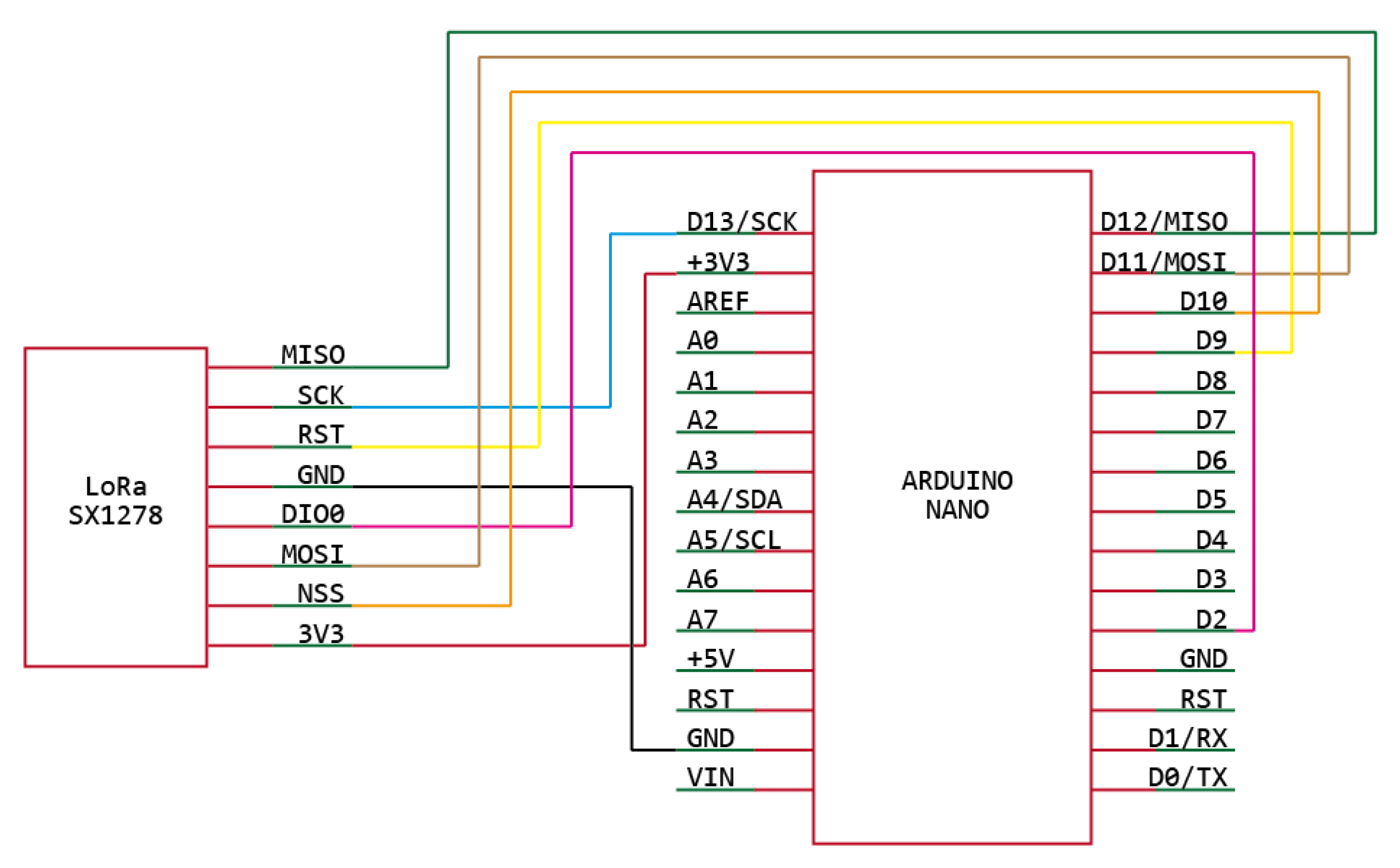
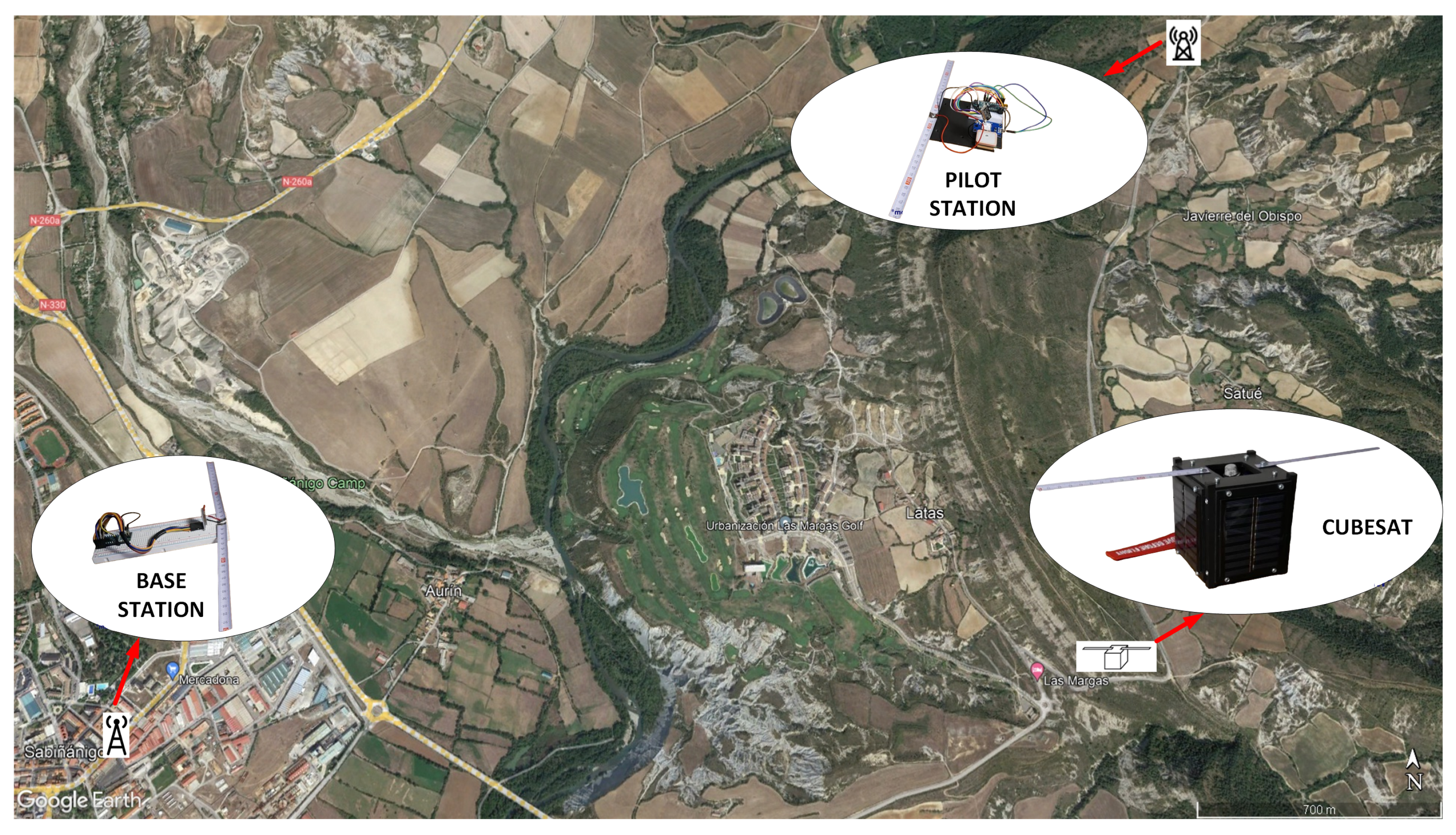
3.2. Base Station
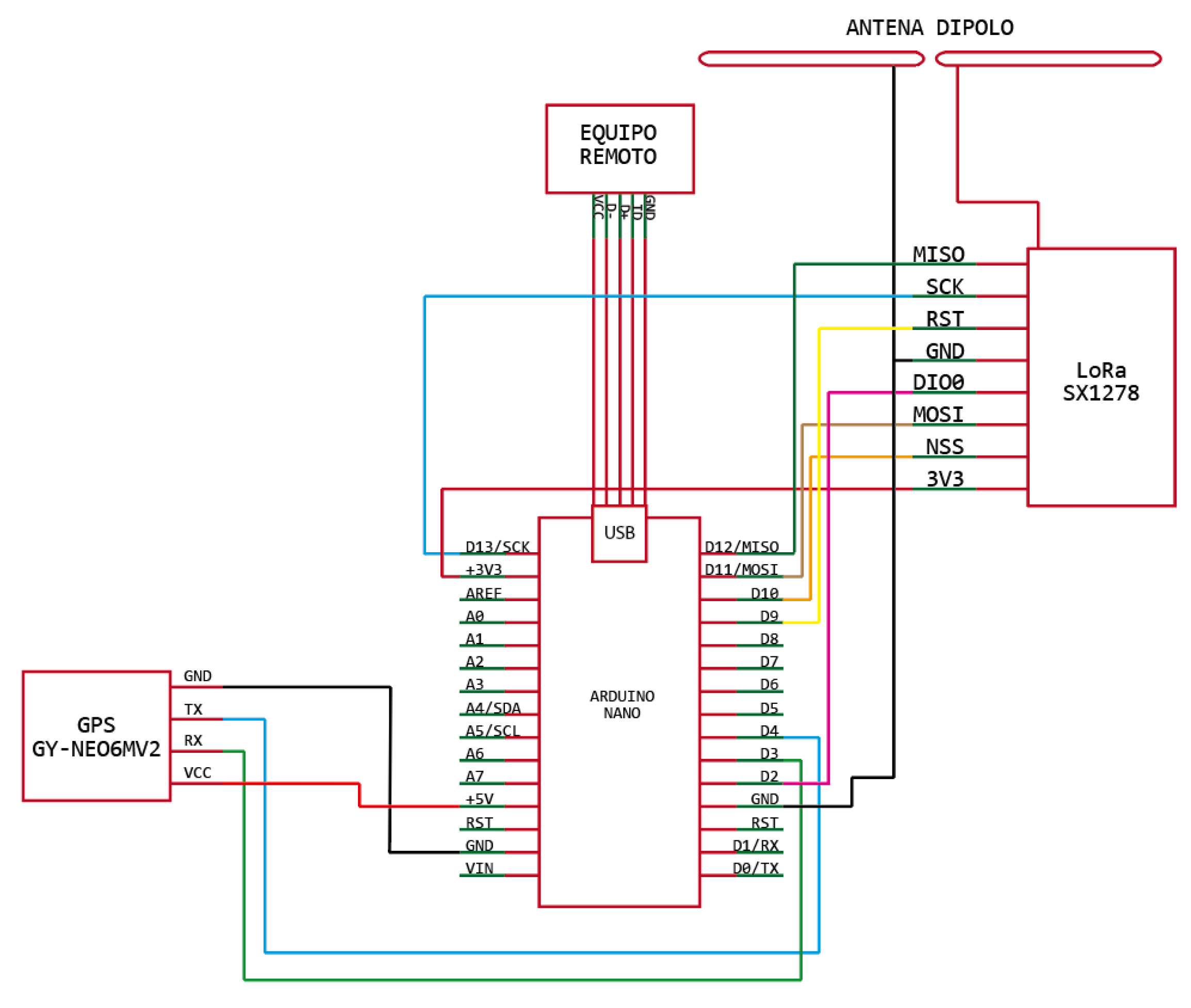
3.3. Pilot Station
3.4. Software Components
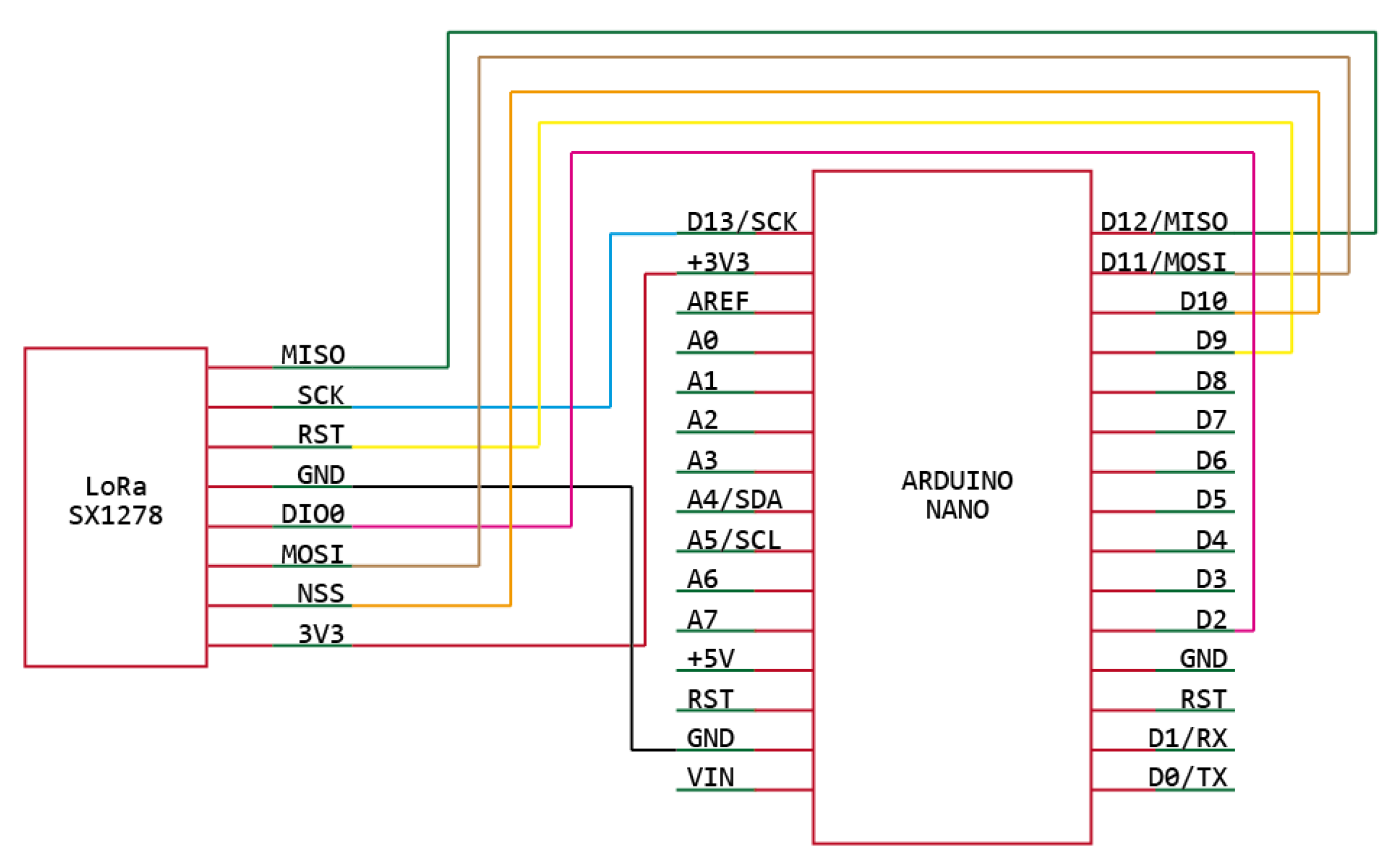
- SPI.h: To use the SPI port on the Arduino to control the onboard hardware of SPI (bus communication with Arduino);
- Wire.h: To use the I2C bus in Arduino;
- LoRa.h: To send and receive data through the LoRa protocol. We used the default LoRa configuration: bandwidth = 125.0 kHz, spreading factor = 9, coding rate = 7, and output power = 17 dBm;
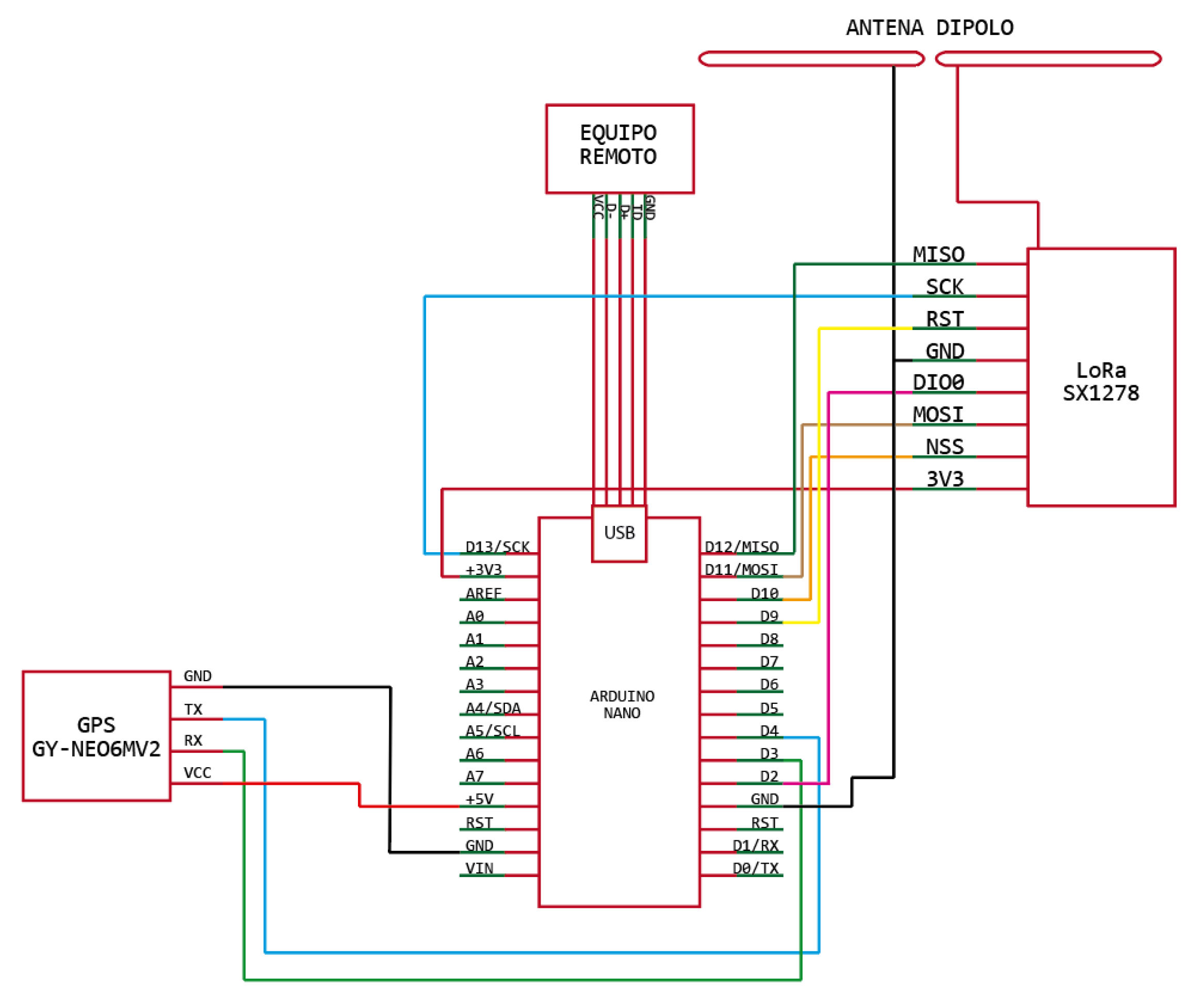
- TinyGPS: To provide GPS NMEA functionality;
- SoftwareSerial.h: To allow serial communication through other digital pins of the Arduino, using software to replicate the same functionality. Multiple software serial ports, with speeds up to 115,200 bps, were used.
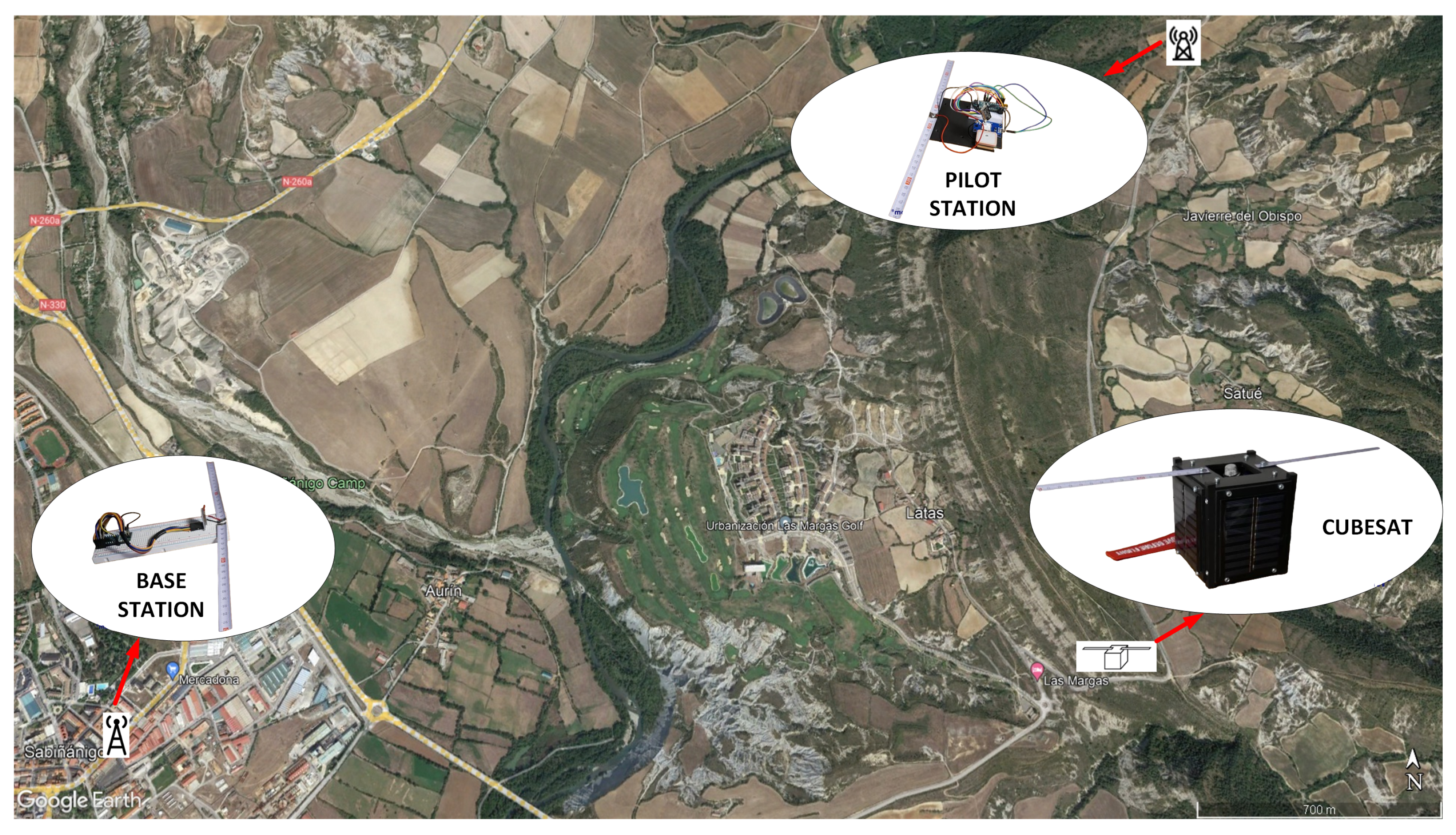
4. Pre-Launch Procedures
- Airspace reservation:
- Choose a launch site, avoiding the existence of overhead lines nearby and reducing the likelihood of wind blowing the probe out to sea;
- Contact the corresponding area navigation manager in the launching country to request the form—in the proposed case, ENAIRE (air navigation manager of Spain);
- Selection of components for deployment:
- Choose balloon (Totex TA-1000), helium load (3.5 cm volume), and parachute (Rocketman 4 ft);
- Insert information into Parachute Descent Rate Calculator at parachute section and Meteorological Balloon Burst Estimator according to [26], to estimate descent rate and balloon burst, respectively;
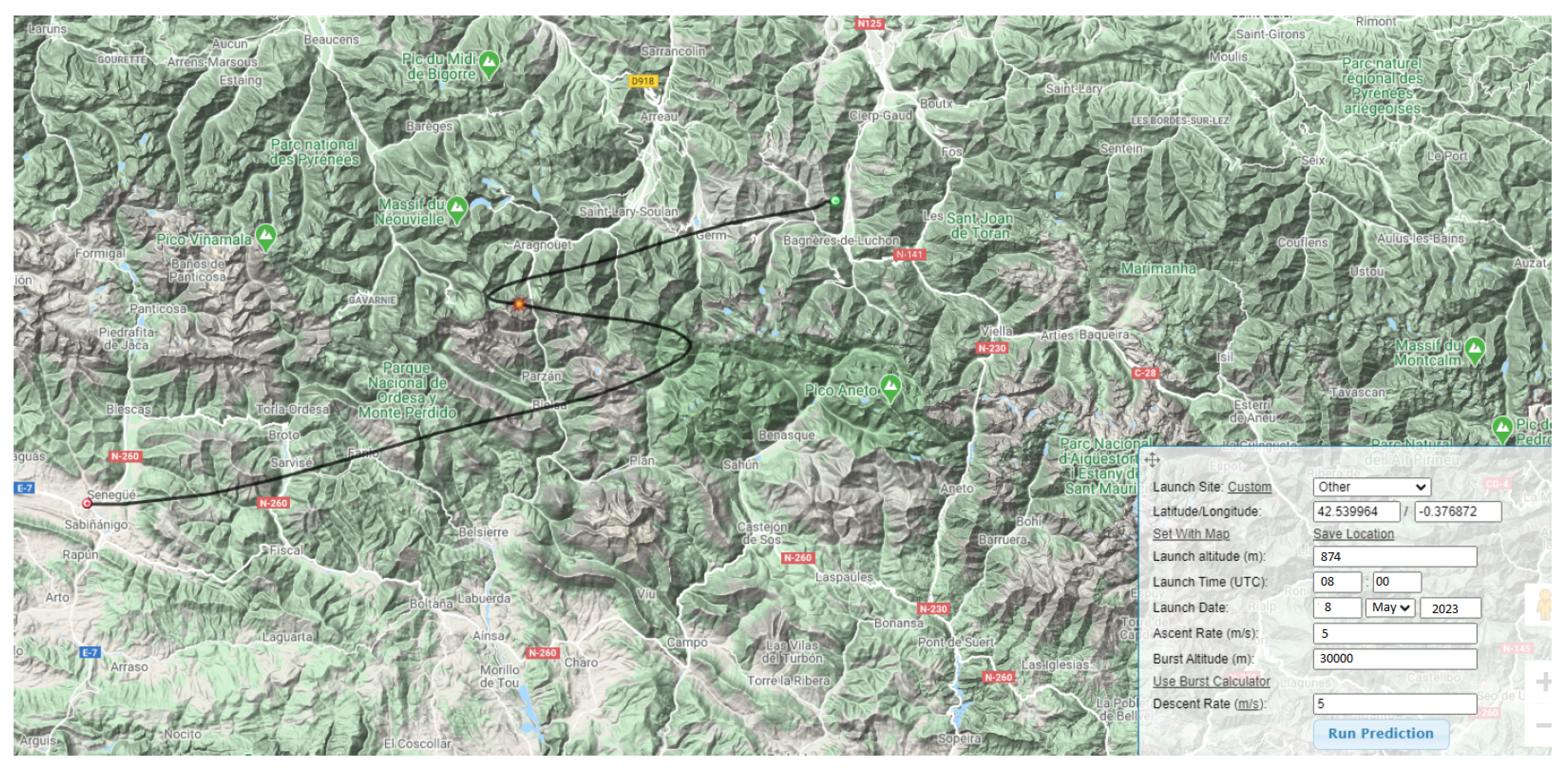
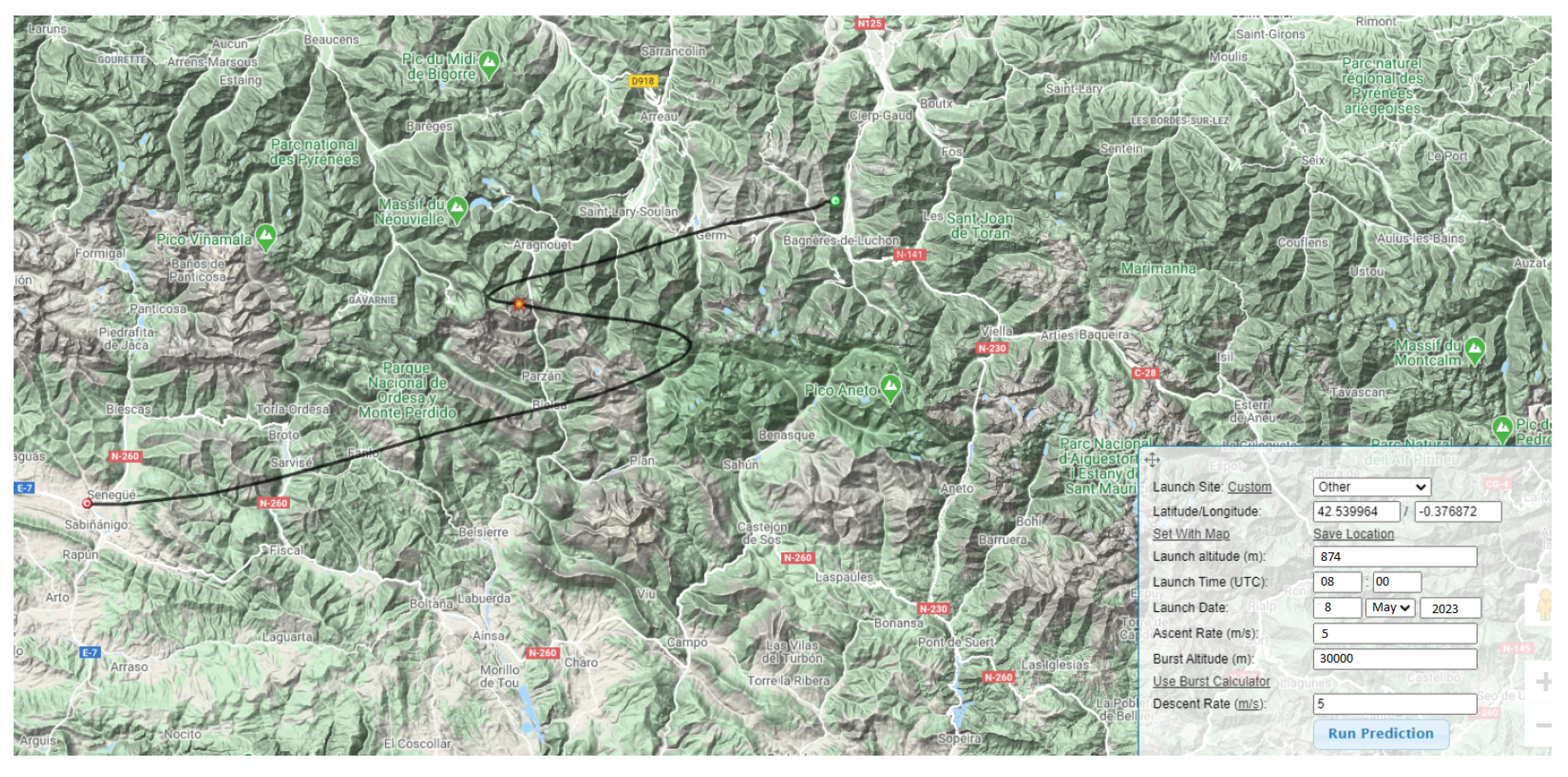
- Simulation of the possible trajectories of the balloon:
- Choose the location and time of launch;
- Predict the balloon trajectory [27];
5. Test Verification and Evaluation
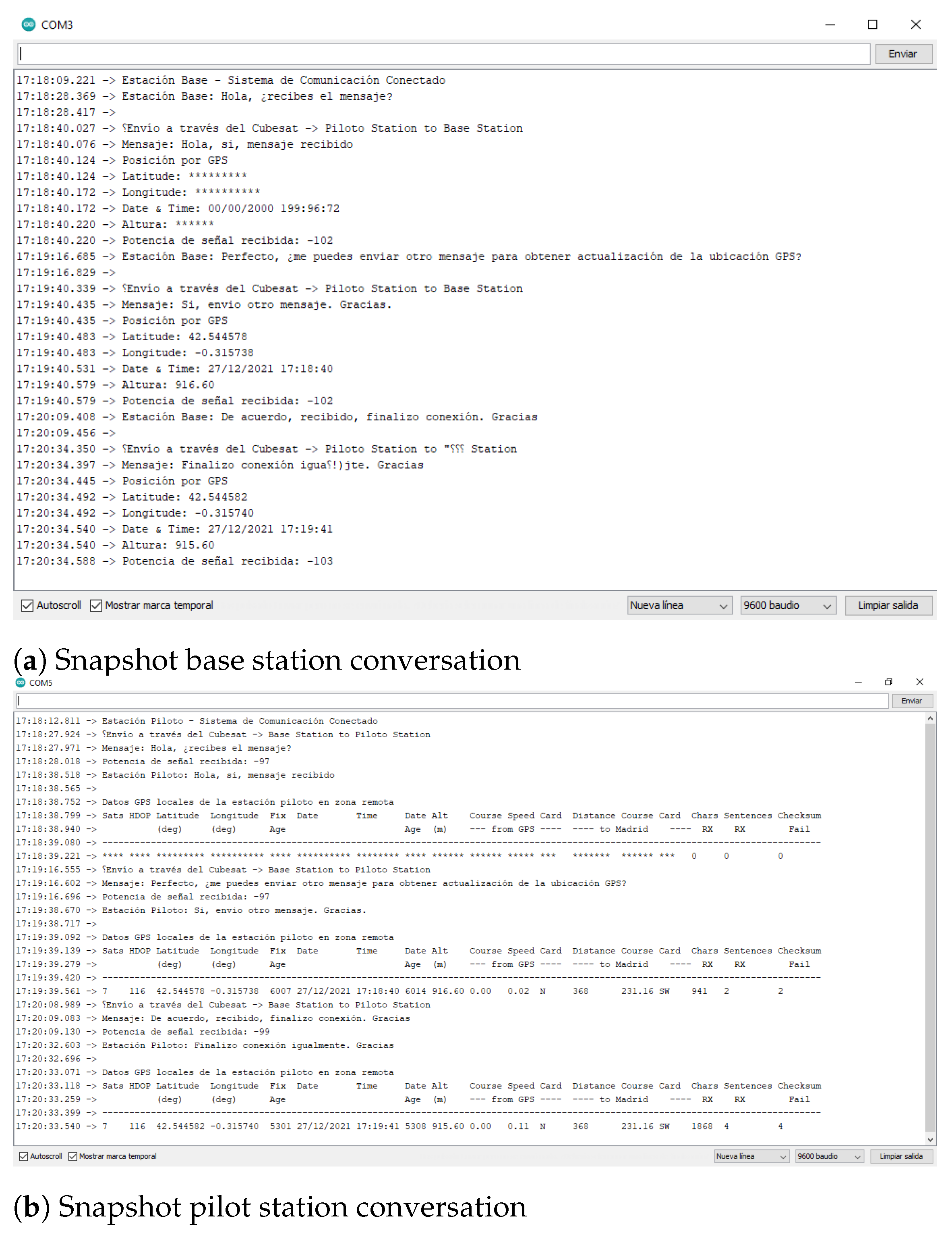
5.1. TS1: Communication Base Station and CubeSat
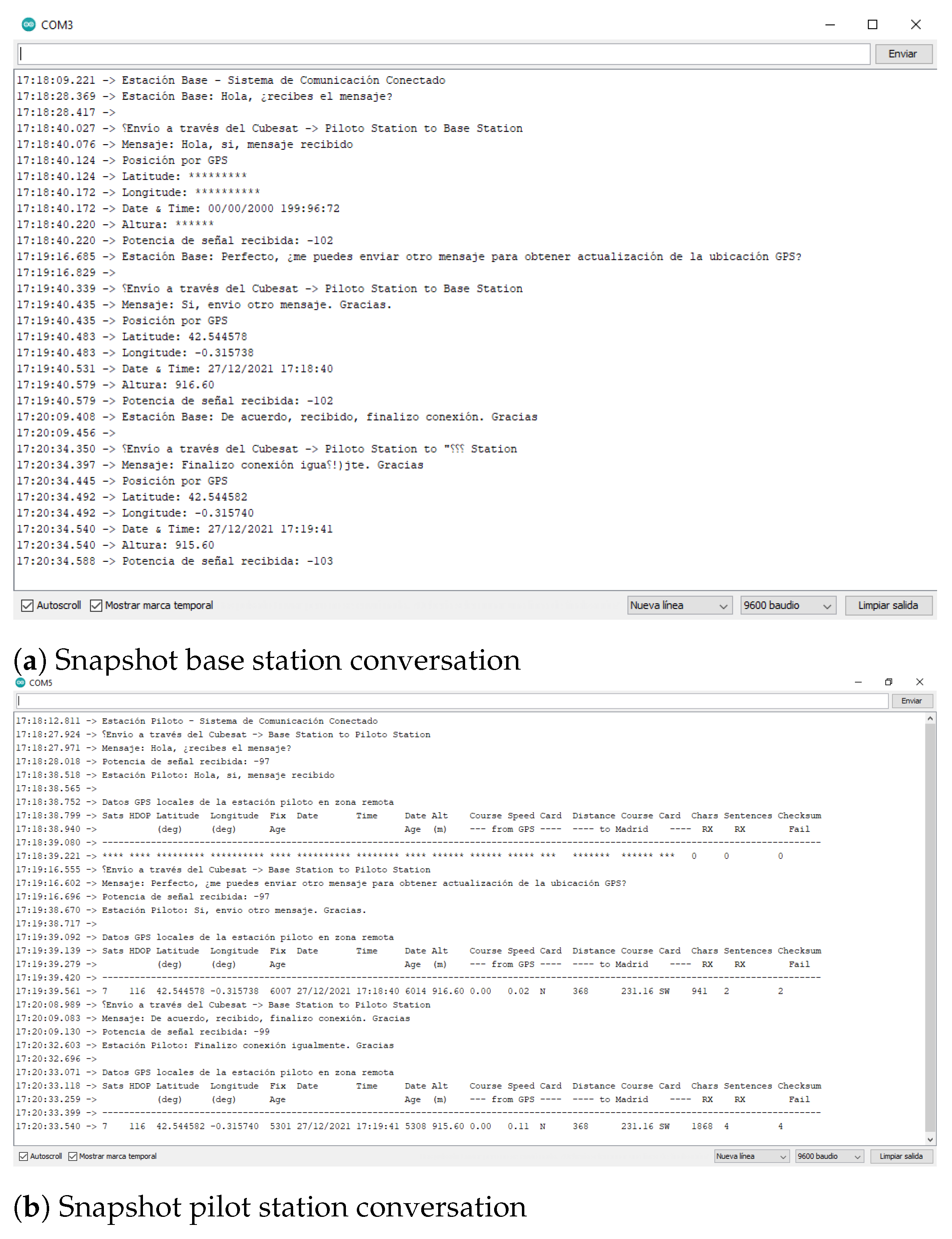
5.2. TS2: Communication between Base Station and Pilot Station through CubeSat
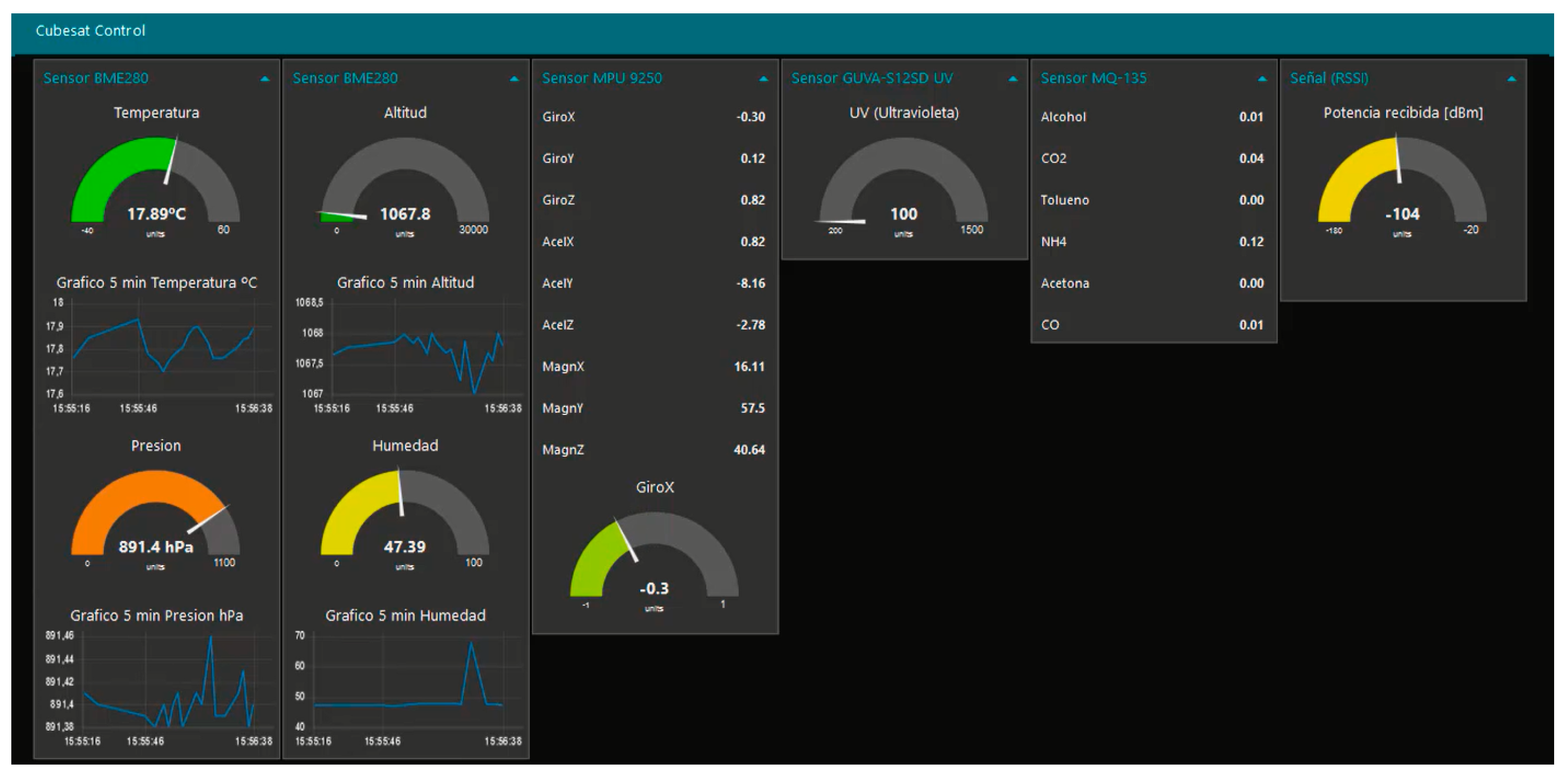
5.3. Sensor Data Acquisition and Visualization
6. Conclusions & Future Work
- Design a printed circuit prototype to house the microcontroller, sensors, and actuators, among others;
- Investigate modification of the control subsystem to be governed by a more efficient and robust microcontroller such as the MSP432;
- Provide more functionality to the nanosatellite: battery level sensor, antenna deployment warning device, and solar panel charge level, among others;
- Design and manufacture another type of antenna to cover larger distances.
- Develop a prototype that can achieve higher heights while maintaining LoRa communication. These heights will be closer to commercial CubeSats or LEO satellites.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 6LoWPAN | IPv6 over Low-Power Wireless Personal Area Networks |
| COTS | Commercial Off-The-Shelf |
| GPS | Global Positioning System |
| GSM | Global System for Mobile Communication |
| HAPS | High-Altitude Platform Stations |
| IDE | Integrated Development Environment |
| IoT | Internet of Things |
| LEO | Low Earth Orbit |
| LoRa | Long Range |
| LoRaWAN | Lomg-Range Wide Area Networks |
| LTE | Long-Term Evolution |
| RSSI | Received Signal Strength Indicator |
| SatCom | Satellite Communication |
| SDR | Software Defined Radio |
| SF | Spreading Factor |
| SPI | Serial Peripheral Interface |
| UMTS | Universal Mobile Telecommunications System |
References
- Das, L. You’re Not Imagining It—There Really Were a Lot of Climate Disasters This Summer. 2002. Available online: https://www.greenpeace.org.uk/news/climate-disasters-summer-2022/ (accessed on 16 August 2023).
- Saeed, N.; Elzanaty, A.; Almorad, H.; Dahrouj, H.; Al-Naffouri, T.Y.; Alouini, M.S. CubeSat Communications: Recent Advances and Future Challenges. IEEE Commun. Surv. Tutorials 2020, 22, 1839–1862. [Google Scholar] [CrossRef]
- Arifin, J. Study of CUBESAT systems for IoT. In Proceedings of the 2021 12th International Renewable Engineering Conference (IREC), Amman, Jordan, 14–15 April 2021; pp. 1–3. [Google Scholar] [CrossRef]
- Wu, T.; Qu, D.; Zhang, G. Research on LoRa Adaptability in the LEO Satellites Internet of Things. In Proceedings of the 2019 15th International Wireless Communications Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 131–135. [Google Scholar] [CrossRef]
- Zourmand, A.; Kun Hing, A.L.; Wai Hung, C.; AbdulRehman, M. Internet of Things (IoT) using LoRa technology. In Proceedings of the 2019 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), Selangor, Malaysia, 29 June 2019; pp. 324–330. [Google Scholar] [CrossRef]
- The Things Network. LoRa World Record Broken: 832 km/517mi Using 25 mW. The Things Network. 2021. Available online: https://www.thethingsnetwork.org/article/lorawan-world-record-broken-twice-in-single-experiment-1 (accessed on 16 August 2023).
- Giambene, G.; Korre, K. LoRa-based System for IoT Applications via HAPS in Remote Areas. In Proceedings of the 2022 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 22–24 September 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Valencia, M.A.C.; Cruz, F.R.G.; Balakit, R.B. LoRa Transmission System for Weather Balloons. In Proceedings of the 2019 IEEE 11th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM), Laoag, Philippines, 29 November–1 December 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Monzon Baeza, V.; Alvarez Marban, M. High Altitude Platform Stations Aided Cloud-Computing Solution for Rural-Environment IoT Applications. Comput. Netw. Commun. 2023, 1, 85–98. [Google Scholar]
- Ferko, N.; Neji, B.; Barakeh, Z.A.; Ghandour, R.; Beyrouthy, T. Balloon based low altitude communication relay utilizing LoRa. In Proceedings of the 2022 International Symposium ELMAR, Zadar, Croatia, 12–14 September 2022; pp. 97–100. [Google Scholar] [CrossRef]
- Baeza, V.M.; Ha, V.N.; Querol, J.; Chatzinotas, S. Non-coherent massive MIMO integration in satellite communication. In Proceedings of the 39th International Communications Satellite Systems Conference (ICSSC 2022), Stresa, Italy, 18–21 October 2022; pp. 200–205. [Google Scholar] [CrossRef]
- De Battista, D.; Fabri, S.G.; Bugeja, M.K.; Azzopardi, M.A. PocketQube Pico-Satellite Attitude Control: Implementation and Testing. IEEE J. Miniaturization Air Space Syst. 2020, 1, 90–102. [Google Scholar] [CrossRef]
- Baeza, V.M.; Lagunas, E.; Al-Hraishawi, H.; Chatzinotas, S. An Overview of Channel Models for NGSO Satellites. In Proceedings of the 2022 IEEE 96th Vehicular Technology Conference (VTC2022-Fall), London, UK, 26–29 September 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Doroshkin, A.A.; Zadorozhny, A.M.; Kus, O.N.; Prokopyev, V.Y.; Prokopyev, Y.M. Experimental Study of LoRa Modulation Immunity to Doppler Effect in CubeSat Radio Communications. IEEE Access 2019, 7, 75721–75731. [Google Scholar] [CrossRef]
- Zadorozhny, A.M.; Doroshkin, A.A.; Gorev, V.N.; Melkov, A.V.; Mitrokhin, A.A.; Prokopyev, V.Y.; Prokopyev, Y.M. First Flight-Testing of LoRa Modulation in Satellite Radio Communications in Low-Earth Orbit. IEEE Access 2022, 10, 100006–100023. [Google Scholar] [CrossRef]
- Putra, N.; Edwar, H.A.; Hasbi, W.; Manggala, M.P.; Kusmara, D.U.; Putri, W.M.; Triyogi, R.; Wirakusuma, M.P. Design of Cubesat Microstrip Antenna with Metamaterial Structure for LoRa Communication. In Proceedings of the 2021 IEEE International Conference on Aerospace Electronics and Remote Sensing Technology (ICARES), Bali, Indonesia, 3–4 November 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Fernandez, L.; Ruiz-De-Azua, J.A.; Calveras, A.; Camps, A. Assessing LoRa for Satellite-to-Earth Communications Considering the Impact of Ionospheric Scintillation. IEEE Access 2020, 8, 165570–165582. [Google Scholar] [CrossRef]
- Semtech Corporation. SX1278: LoRa Connect™ 137MHz to 525MHz Long Range Low Power Transceiver. 2023. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1278#documentation (accessed on 16 August 2023).
- juliano85. Universal 1U Cubesat. 2020. Available online: https://www.thingiverse.com/thing:4096437 (accessed on 16 August 2023).
- Arduino. Arduino Nano. 2023. Available online: https://docs.arduino.cc/static/ac6db38447a17e4bcb1dc073eab55c9f/A000005-datasheet.pdf (accessed on 16 August 2023).
- Bosch Sensortec GmbH. BME280: Combined Humidity and Pressure Sensor. 2022. Available online: https://www.bosch-sensortec.com/media/boschsensortec/downloads/datasheets/bst-bme280-ds002.pdf (accessed on 16 August 2023).
- InvenSense Inc. MPU-9250 Product Specification Revision 1.1. 2016. Available online: https://invensense.tdk.com/wp-content/uploads/2015/02/PS-MPU-9250A-01-v1.1.pdf (accessed on 16 August 2023).
- Hanwei Electronics Co., Ltd. MQ-135 GAS SENSOR. 2010. Available online: https://www.electronicoscaldas.com/datasheet/MQ-135_Hanwei.pdf (accessed on 16 August 2023).
- Roithner LaserTechnik GmbH. GUVA-S12SD. 2015. Available online: https://www.roithner-laser.com/datasheets/pd/uv/guva-s12sd.pdf (accessed on 16 August 2023).
- U-blox. NEO-6 u-blox 6 GPS Modules Data Sheet. 2011. Available online: https://content.u-blox.com/sites/default/files/products/documents/NEO-6_DataSheet_%28GPS.G6-HW-09005%29.pdf (accessed on 16 August 2023).
- Engineering, R. Engineering at the Edge of Space Since 2006. 2006. Available online: http://randomaerospace.com/Random_Aerospace/Parachutes.html (accessed on 16 August 2023).
- Cambridge University Space Flight. CUSF Landing Prediction 2.5. 2010. Available online: http://predict.habhub.org/ (accessed on 16 August 2023).
- Greig, A.; Randall, S.; Totex, K. Cambridge University Space Flight. 2010. Available online: https://predict.sondehub.org/ (accessed on 16 August 2023).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Consumption (mA) |
|---|---|
| Arduino Nano | 19 |
| LoRa SX1278 | 120 |
| Sensor GPS GY-NEO6MV2 [25] | 45 |
| Others | 10 |
| Total | 194 |
| Test # | Latitude | Longitude | Altitude (m) | Distance (km) | RSSI (dBm) |
|---|---|---|---|---|---|
| 1 | 42°3155.7 N | 0°2246.0 W | 832.98 | 0.187 | −99 |
| 2 | 42°3226.3 N | 0°2359.4 W | 793.86 | 2.1 | −102 |
| 3 | 42°3225.2 N | 0°2355.8 W | 823.33 | 4.79 | −103 |
| 4 | 42°3518.6 N | 0°3157.7 W | 1067.8 | 14.20 | −104 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Parada, R.; Monzon Baeza, V.; Barraca-Ibort, D.N.; Monzo, C. LoRa-Based Low-Cost Nanosatellite for Emerging Communication Networks in Complex Scenarios. Aerospace 2023, 10, 754. https://doi.org/10.3390/aerospace10090754
Parada R, Monzon Baeza V, Barraca-Ibort DN, Monzo C. LoRa-Based Low-Cost Nanosatellite for Emerging Communication Networks in Complex Scenarios. Aerospace. 2023; 10(9):754. https://doi.org/10.3390/aerospace10090754
Chicago/Turabian StyleParada, Raúl, Victor Monzon Baeza, David N. Barraca-Ibort, and Carlos Monzo. 2023. "LoRa-Based Low-Cost Nanosatellite for Emerging Communication Networks in Complex Scenarios" Aerospace 10, no. 9: 754. https://doi.org/10.3390/aerospace10090754
APA StyleParada, R., Monzon Baeza, V., Barraca-Ibort, D. N., & Monzo, C. (2023). LoRa-Based Low-Cost Nanosatellite for Emerging Communication Networks in Complex Scenarios. Aerospace, 10(9), 754. https://doi.org/10.3390/aerospace10090754