
Experimental Investigation of Helicopter Noise While Approaching an Elevated Helipad



Abstract
:1. Introduction
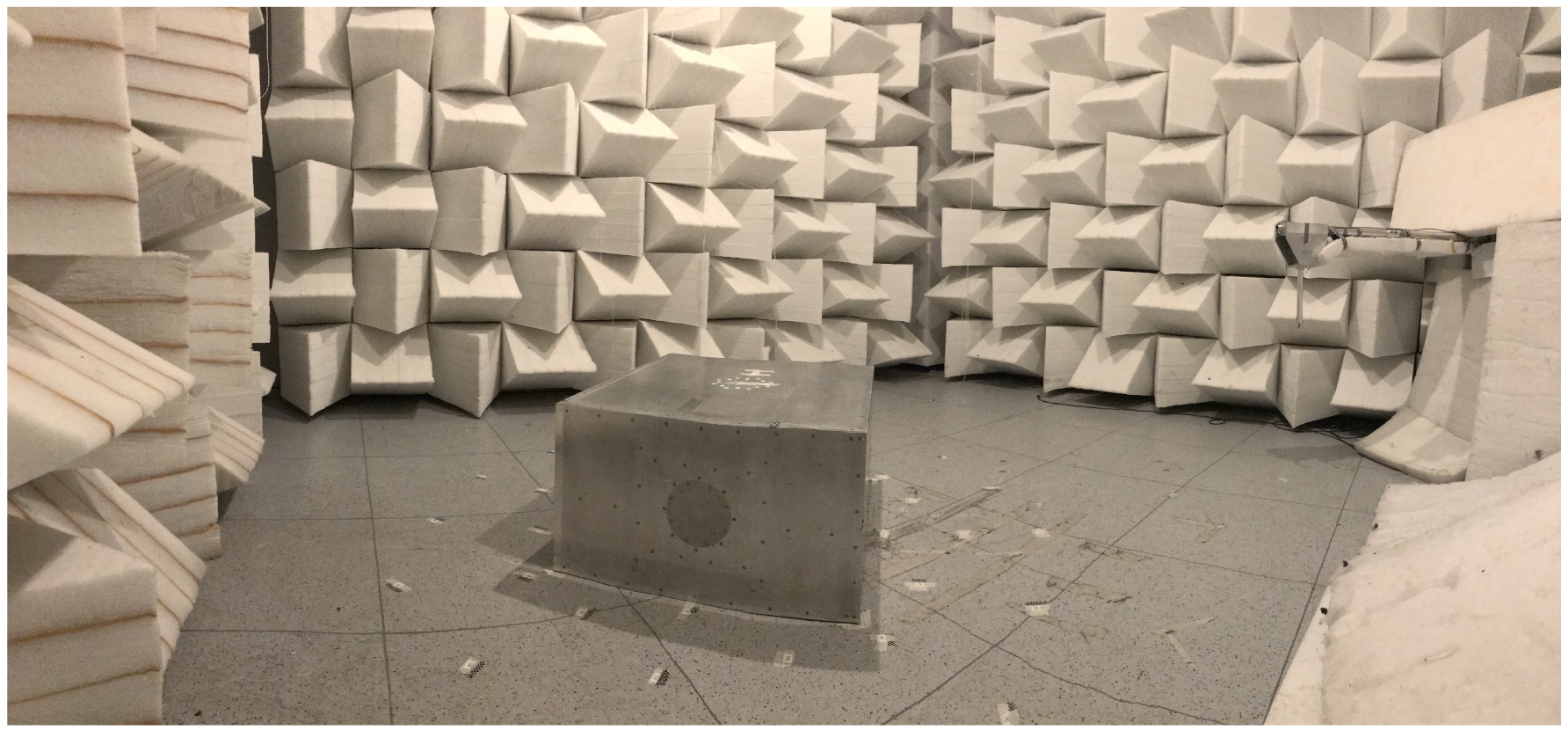
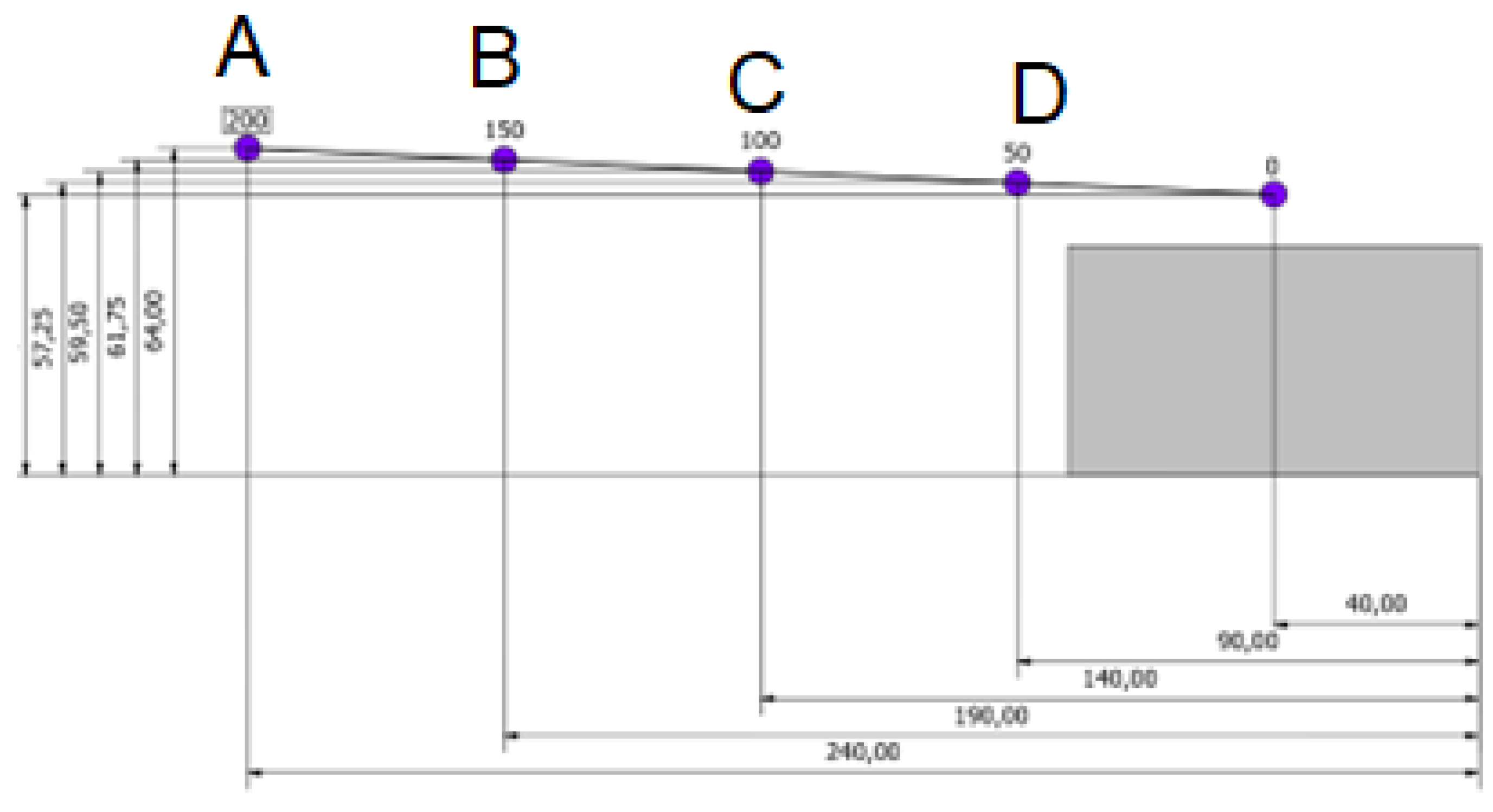
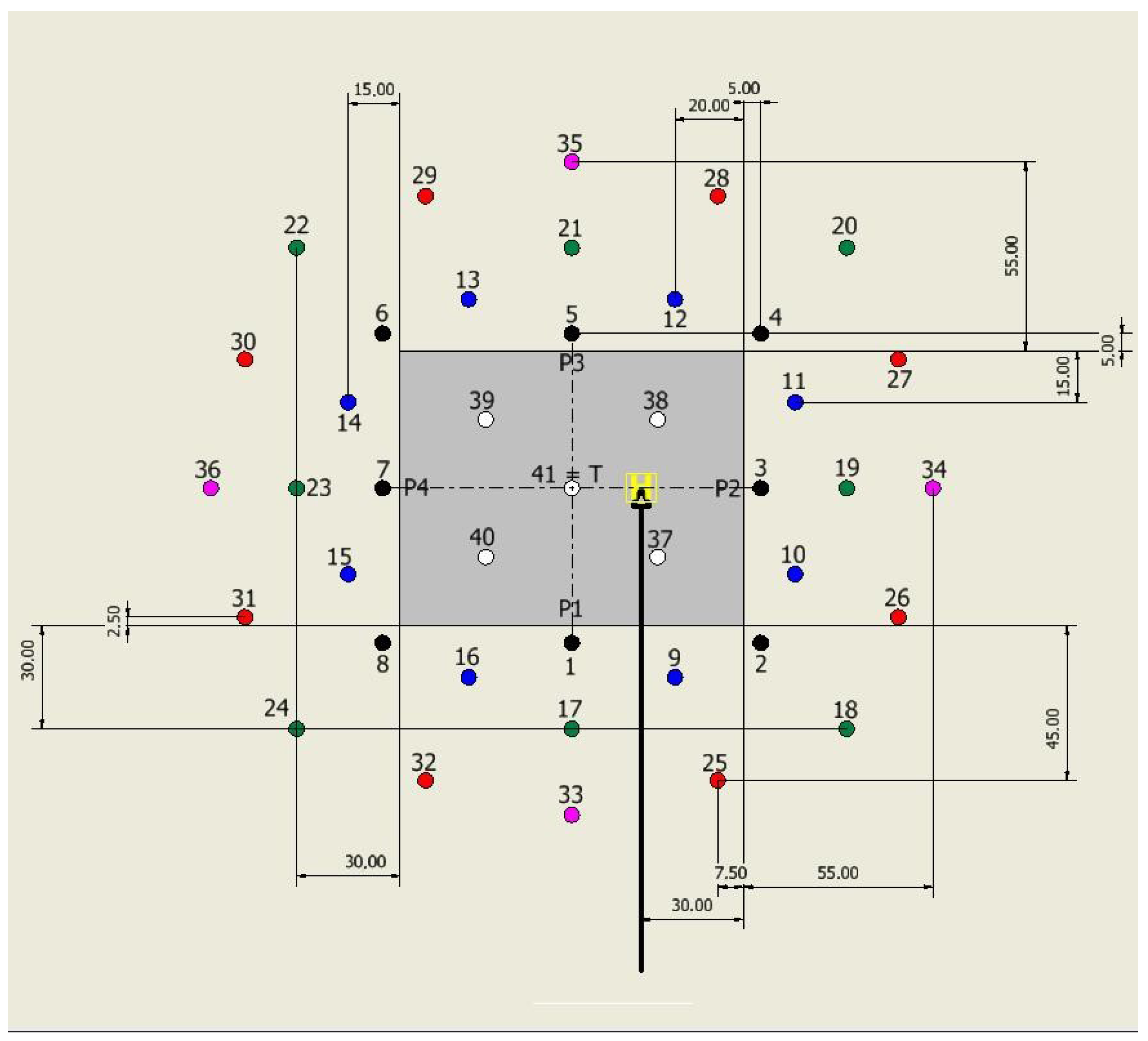
2. Experimental Set Up
Test Rig and Measurements Set Up
3. Results and Discussion
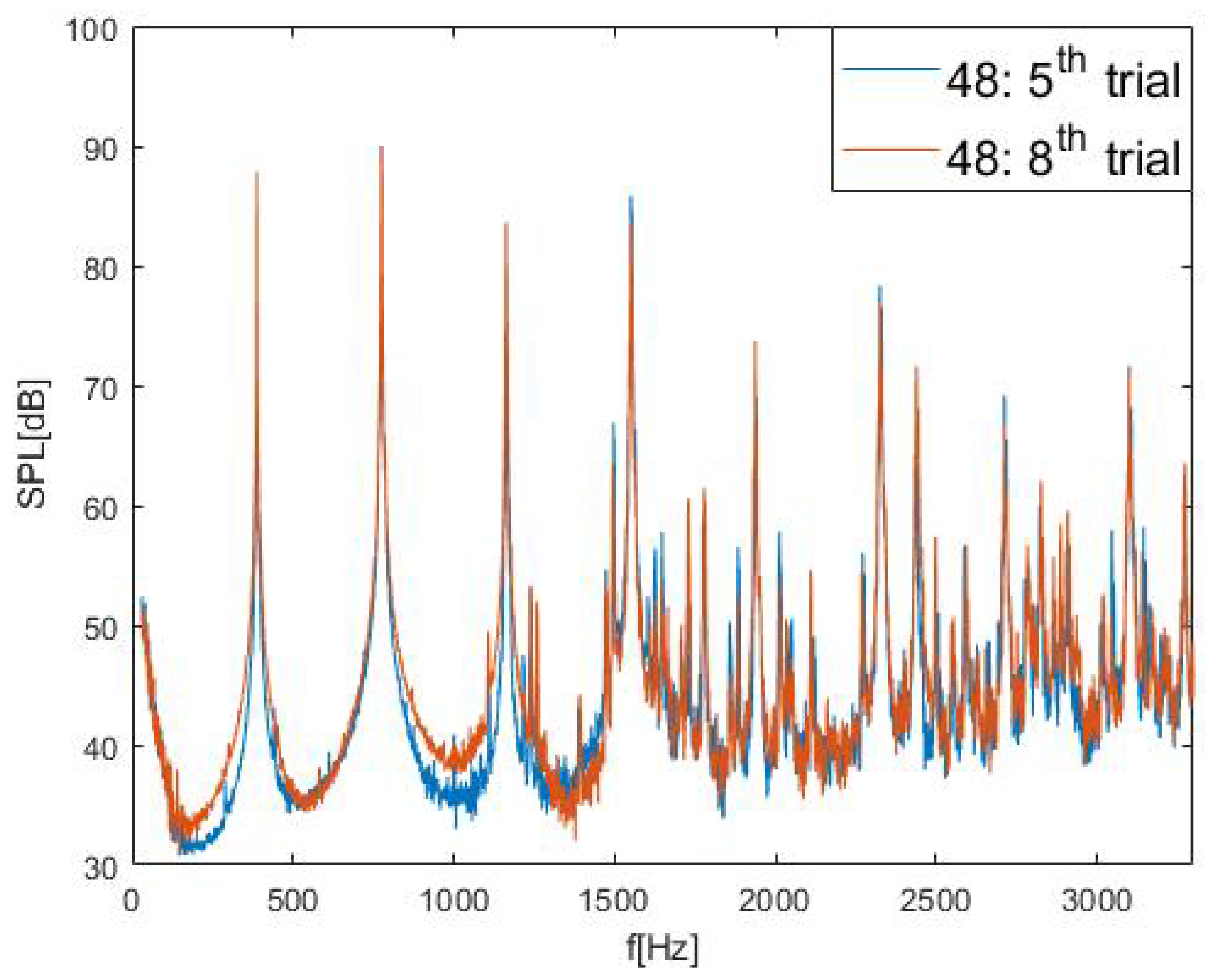
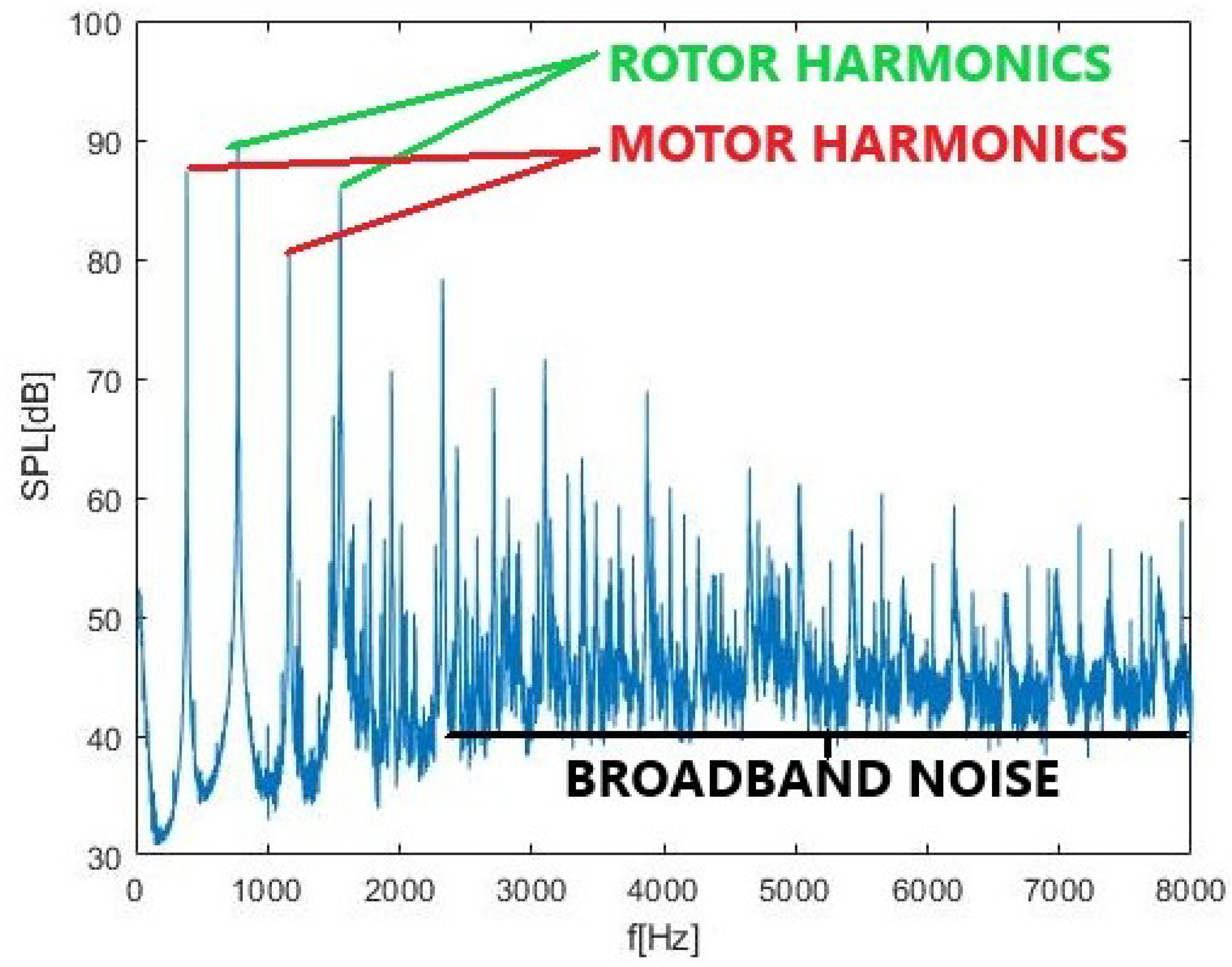
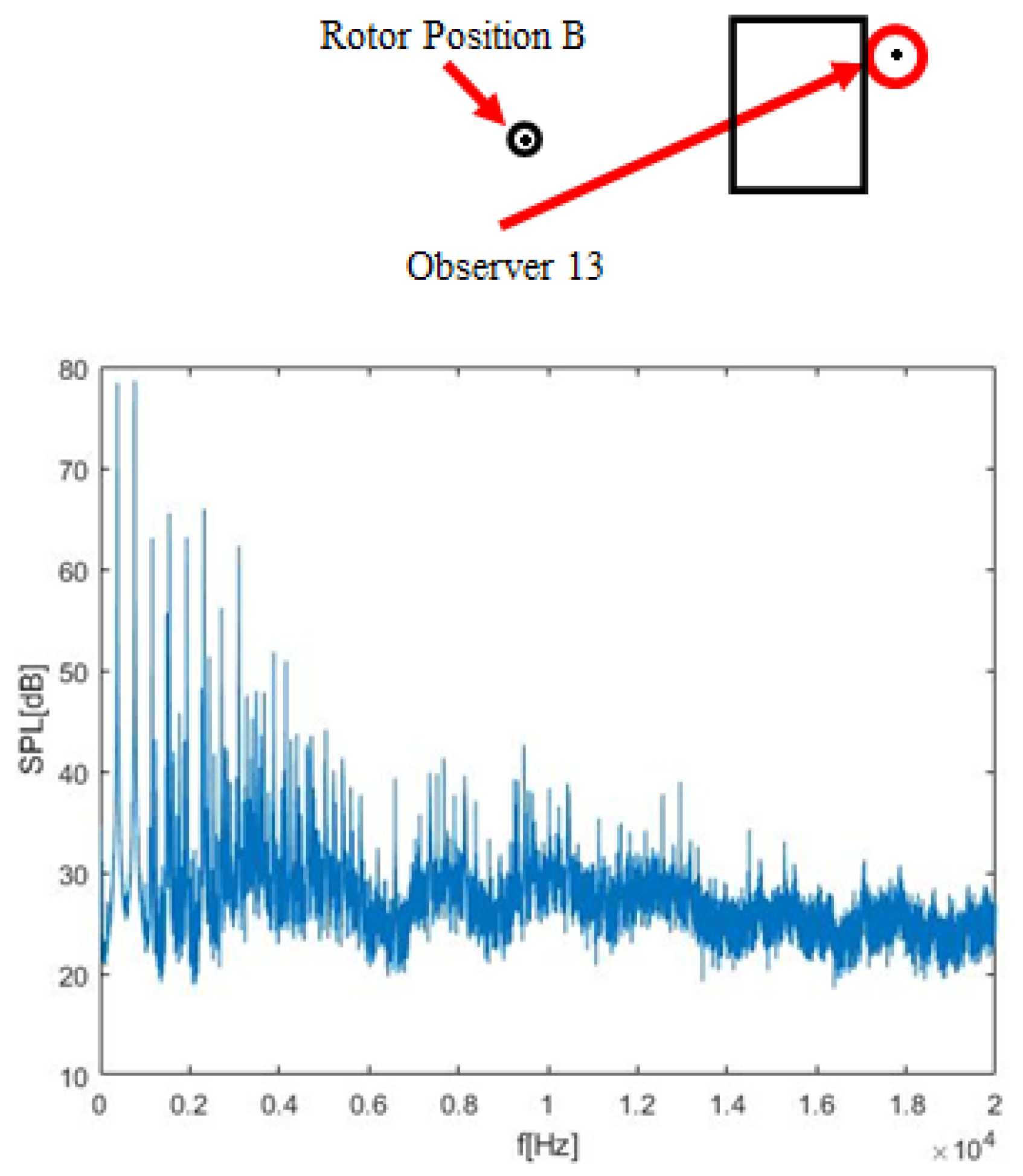
- Loading Noise: Produced by the pressure variation caused by rotor blade motion and related to lift and drag forces, i.e., a tonal component that is represented by even rotor harmonics (indicated as “rotor harmonics” in the figure). This noise component can be in a certain extent involved also in odd harmonics , including the fundamental one-per-rev due to possible small asymmetries in rotor blade manufacturing. As can be seen in Figure 6, the first even harmonic presents the highest peak value;
- Thickness Noise: Due to the air displacement produced by the blade motion. As for the loading noise, it is basically a tonal noise, mainly on the even harmonics;
- Vibration noise: involved in both odd harmonics (indicated as “motor harmonics” in the figure) and even harmonics and related to the vibrations caused by aerodynamic load and motor operation;
- Broadband Noise: mainly produced by the turbulence of the generated wake.
Result Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AAM | Advanced Air Mobility |
| c | sound speed |
| eVTOL | electrical Vertical Take-Off and Landing |
| f | frequency |
| acquisition frequency | |
| n | number of harmonics |
| rpm | round per minute |
| SPL | Sound Pressure Level |
| observation time | |
| time interval | |
| covered distance by direct and reflected waves | |
| scale factor | |
| standard deviation | |
| angular speed |
References
- Lusiak, T.; Ziubiński, A.; Szumanski, K. Interference between helicopter and its surroundings, experimental and numerical analysis. Task Q. 2009, 13, 379–392. [Google Scholar]
- Vouros, S.; Goulos, I.; Pachidis, V. Integrated methodology for the prediction of helicopter rotor noise at mission level. Aerosp. Sci. Technol. 2019, 89, 136–149. [Google Scholar] [CrossRef]
- Schomer, P.; Hoover, B.D.; Wagner, L.R. Human response to helicopter noise: A test of a-weighting. In DOD Noise Source Human Response Characterization; Technical Report, N91-13; US Army Corps of Engineers, Construction Engineering Research Laboratory: Champaign, IL, USA, 1991. [Google Scholar]
- Ahuja, K.; Funk, R.; Hsu, J.; Heighs, M.; Charles, S. Operation Helistar—Effects of Buildings on Helicopter Noise; DOT/FAA/ND 97-13 5, FAA; U.S. Department of Transportation: Washington, DC, USA, 1997. [Google Scholar]
- Hilton, D.A.; Pegg, R.J. The Noise Environment of a School Classroom Due to the Operation of Utility Helicopters; Nasa tm x-71957, NASA Technical Memorandum; NASA: Washington, DC, USA, 1974. [Google Scholar]
- Doolan, C.J.; Leclercq, D. An anechoic wind tunnel for the investigation of the main rotor/tail-rotor blade vortex interaction. In Proceedings of the 6th Australian Vertiflite Conference on Helicopter Technology, Melbourne, Australia, 20–22 March 2007. [Google Scholar]
- Feight, J.A.; Jacob, J.D.; Gaeta, R.J. Acoustic characterization of a multi-rotor uas as a first step towards noise reduction. In Proceedings of the AIAA SciTech Forum, 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Zawodny, N.S.; Boyd, D.J. Investigation of rotorairframe interaction noise associated with small-scale rotary-wing unmanned aircraft systems. In Proceedings of the AHS 73rd Annual Forum, Fort Worth, TX, USA, 9–11 May 2017. [Google Scholar]
- Yang, Y.; Liu, Y.; Hu, H.; Liu, X.; Wang, Y.; Arcondoulis, E.J.; Li, Z. Experimental study on noise reduction of a wavy multi-copter rotor. Appl. Acoust. 2020, 165, 107311. [Google Scholar] [CrossRef]
- Yin, J.; Rossignol, K.S.; Barbarino, M.; Bianco, D.; Testa, C.; Brouwer, H.; Janssen, S.R.; Reboul, G.; Vigevano, L.; Bernardini, G.; et al. GARTEUR activities on acoustical methods and experiments for studying on acoustic scattering. CEAS Aeronaut. J. 2019, 10, 531–551. [Google Scholar] [CrossRef]
- Thai, A.D.; De Paola, E.; Di Marco, A.; Stoica, L.G.; Camussi, R.; Tron, R.; Grace, S.M. Experimental and Computational Aeroacoustic Investigation of Small Rotor Interactions in Hover. Appl. Sci. 2021, 11, 10016. [Google Scholar] [CrossRef]
- Jia, Z.; Lee, S. Acoustic Analysis of a Quadrotor eVTOL Design via High-Fidelity Simulations. In Proceedings of the 25th AIAA/CEAS Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019. [Google Scholar]
- Poggi, C.; Bernardini, G.; Gennaretti, M.; Camussi, R. Scalability of Mach Number Effects on Noise Emitted by Side-by-Side Propellers. Appl. Sci. 2022, 12, 9507. [Google Scholar] [CrossRef]
- Yin, J.; Rossignol, K.S.; Rottmann, L.; Schwarz, T. Numerical investigations on small-scale rotor configurations with validation using acoustic wind tunnel data. In Proceedings of the 48th European Rotorcraft Forum, Winterthur, Switzerland, 6–8 September 2022. [Google Scholar]
- Yin, J.; Zanotti, A.; Gibertini, G.; Vigevano, L.; Rossignol, K. Design of a Generic Rotor Noise Source for Helicopter Fuselage Scattering Tests. In Proceedings of the 44th European Rotorcraft Forum (ERF 2018), Delft, The Netherlands, 18–21 September 2018; pp. 11–20. [Google Scholar]
- Gibertini, G.; Grassi, D.; Parolini, C.; Zagaglia, D.; Zanotti, A. Experimental Investigationon of the Aerodynamic Interaction Between a Helicopter and Ground Obstacles. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 1395–1406. [Google Scholar] [CrossRef]
- Cowan, J. Handbook of Environmental Acoustics; John Wiley and Sons: Hoboken, NJ, USA, 1994. [Google Scholar]
- Ffowcs Williams, J.E. Noise source mechanisms. In Modern Methods in Analytical Acoustics, Lecture Notes; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Grizzi, S.; Camussi, R. Experimental investigation of the Near-Field Noise generated by a Compressible Round Jet. J. Phys. Conf. Ser. 2011, 318, 092003. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean Value | ||
|---|---|---|
| Pressure ( Pa) | 9.9138 | 0.0057 |
| Temperature (K) | 291.93 | 0.31 |
| Relative Humidity () | 39.5 | 1.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gibertini, G.; Rezzonico, S.; Rossetti, M.; Zanotti, A. Experimental Investigation of Helicopter Noise While Approaching an Elevated Helipad. Aerospace 2023, 10, 701. https://doi.org/10.3390/aerospace10080701
Gibertini G, Rezzonico S, Rossetti M, Zanotti A. Experimental Investigation of Helicopter Noise While Approaching an Elevated Helipad. Aerospace. 2023; 10(8):701. https://doi.org/10.3390/aerospace10080701
Chicago/Turabian StyleGibertini, Giuseppe, Silvano Rezzonico, Marco Rossetti, and Alex Zanotti. 2023. "Experimental Investigation of Helicopter Noise While Approaching an Elevated Helipad" Aerospace 10, no. 8: 701. https://doi.org/10.3390/aerospace10080701
APA StyleGibertini, G., Rezzonico, S., Rossetti, M., & Zanotti, A. (2023). Experimental Investigation of Helicopter Noise While Approaching an Elevated Helipad. Aerospace, 10(8), 701. https://doi.org/10.3390/aerospace10080701