3.1. Flow Behavior under Pitch Conditions without Yaw
To get a first-hand appreciation of the key flow behavior associated with the present UAV,
Figure 4 and
Figure 5 show the side views of the surface oil flow visualizations and surface streamlines from the wind tunnel tests and numerical simulations, respectively. Results from six different pitch angles at
, and
are presented here, so as to show the changes in flow patterns along the fuselage as the pitch angle increases gradually. Starting with the experimental results, it can be observed that flows remain almost completely attached to the fuselage up to
. There appears to be minor dark streaks along the upper fuselage that indicate flow separation/reattachments, reminiscent of oil flow patterns observed by [
29,
30] for ogive cylinders at subsonic, low-pitch-angle conditions. Such oil flow patterns are well-documented to be associated with the formation of a pair of counter-rotating vortex roll-ups at the lee side of the ogive cylinder due to flow separations occurring on both sides of the ogive cylinder. The formations of vortex roll-ups on both sides of an ogive cylinder or slender bodies with ogive forebodies have also been reported by [
31,
32], and they are known to exist in symmetrical forms at low pitch angles but destabilize to asymmetrical forms at high pitch angles. As such, it can be deduced that a similar vortex roll-up initiates at approximately a quarter of the fuselage length downstream of the ogive cylinder tip at about
. As the pitch angle continues to increase to
and beyond, flow patterns show that vortex roll-ups begin to form right off the ogive cylinder tips, with clear flow separation/reattachment lines tracing along the length of the fuselage. More importantly, the vortex roll-ups encounter and interact with the fore-wing root, such that their trajectories are affected even as they remain close to the fuselage. As such, the vortex roll-ups continue to remain approximately parallel to the fuselage and below the aft-wing.
A comparison with the numerical results will reveal more flow details, as
Figure 5 shows. Note that the UAV surface is color-tagged with the pressure coefficient, with orange and green denoting higher and lower pressure levels, for better appreciation. Just like the experimental results, flow patterns show that no clear formations of vortex roll-ups associated with the ogive cylinder tip can be observed up to
. Hence, there is good agreement between the experiments and simulations so far. On the other hand, the junction flows between the fore-wing root and the flow along the fuselage can clearly be discerned even at
. As the pitch angle increases, the junction flow distorts the fuselage surface flow from
onwards, such that they divert upwards and towards the vertical stabilizer. There are two reasons why this is happening. Firstly, the fore-wing is inclined at the same pitch angle as the fuselage and that produces an asymmetrical flow scenario leading to lower pressure above the fore-wing. Secondly, the increasing higher pressure levels along the lower fuselage region, resulting from the increasingly larger blockage area posed by the fuselage as its pitch angle increases, will also complement the lower pressure effects above the fore-wing. And in agreement with the experiments, vortex roll-ups are formed once the pitch angle reaches
and beyond, with clear flow separation/reattachment lines originating from the ogive cylinder tip. Due to the flow influences described above, the vortex roll-ups are also diverted towards the upper fuselage and vertical stabilizer. In fact, the interactions between the vortex roll-ups with the fore-wing root predicted by the simulations in
Figure 5d–f can also be seen in their experimental counterparts in
Figure 4d–f. Last but not least, it could also be that the low pressure level generated by the suction side of the fore-wing expands along the fuselage as the pitch angle increases.
Next, attention will be paid towards the flow patterns as observed from the top view, as shown in
Figure 6, so as to complement the side views in
Figure 4 and
Figure 5. Note that due to the flow pattern symmetry about the fuselage centerline for both the experimental and simulation results, each of their halves are arranged side-by-side for ease of comparison. Returning to
Figure 6, it can be discerned that the fuselage flow patterns obtained from the experiments are in reasonable agreement with the simulation results. For instance, the initiation and growth in formations of the vortex roll-ups from the ogive cylinder tip from
onwards can be observed in both of them. On the other hand, there exist some subtle differences in the joined-wing flow patterns observed experimentally and those predicted by the simulations. For instance, while flow separation lines/regions and recirculating flow regions along both the fore- and aft-wings can be seen for both approaches, their exact locations or extents differ for larger pitch angles. There are several plausible reasons for these discrepancies. Firstly, it can be challenging to achieve the right fluorescent oil mix that works under different test conditions, and occasional pooling was detected during the experiments, which could introduce errors in the identifications of flow separation/recirculating regions despite best efforts. This is especially the case when the UAV was rotated to capture its top view flow visualizations. Secondly, discrepancies between the experimental free-stream characteristics and the turbulence model adopted in the simulations could also lead to the differences observed, since no single turbulence model can fully describe the actual wind tunnel flow conditions exactly. Having said that, the general flow separation and recirculating flow characteristics predicted by the simulations are deemed to be sufficiently reasonable and agreeable when compared to the experiments, considering the research goal of better understanding how the present sharp-tipped UAV behaves under a variety of pitch and/or yaw conditions for design purposes.
To better understand the flow patterns observed thus far,
Figure 7 shows the flow behavior along the suction surfaces of both fore- and aft-wings under closer inspection using streamline plots based on simulation results. Results from three representative pitch angles will only be shown for the sake of brevity, where they show “clean” flows with little/no flow separations, mild flow separations and/or spanwise flows, and lastly, significant flow separations and spanwise flows. Starting with the fore-wing, with the expectation that its behavior could affect that of the aft-wing depending on the pitch angle, it can be observed that only a small recirculating region at the wing root and some slight flow separations exist along the fore-wing at a small pitch angle of
, shown in
Figure 7a(i). Despite their occurrences, however, much of the flow leaves the fore-wing without discernible flow separations that could destabilize or increase the free-stream turbulence levels upstream of the aft-wing. Furthermore, if one were to inspect closely the joined-wing design presented in
Figure 1 earlier, a small pitch angle of
will see the fore-wing remaining substantially lower than the aft-wing. This implies that much of the flow leaving the fore-wing trailing edge is unlikely to confer significant influences upon the aft-wing, which agrees well with the result presented for the aft-wing shown in
Figure 7b(i), where little or no separation occurs along the aft-wing. As the pitch angle increases to
, the recirculating region at the wing root, as well as flow separations and spanwise flows along the fore-wing, become more apparent, as shown in
Figure 7a(ii). However, they are not sufficiently severe to reduce the quality of the free stream ahead of the aft-wing (see
Figure 7b(ii)), on top of the fact that the fore-wing remains lower than the aft-wing at that pitch angle. Hence, the flow behavior along the aft-wing does not deviate much from that observed at
. When the pitch angle increases further to
, spanwise flows along the fore-wing become far more pronounced. In particular,
Figure 7a(iii) shows a strong junction vortex arising from interactions between the fuselage and fore-wing boundary layers, which serves to drive highly intense spanwise flows along the entire suction surface of the fore-wing. Flow separations are also significantly more pronounced along the fore-wing now. Interestingly, it does not appear to have significant impact upon the lift generation, even though it is undesirable flow-wise, as will be seen in the lift coefficient results later on. As for the aft-wing depicted in
Figure 7b(iii), significant flow separations, recirculating and spanwise flows, can finally be seen to manifest at this highest pitch angle. It is very likely that this is the direct result of the wake from the separated flow along the fore-wing coming sufficiently close to or even impinging upon the aft-wing to impart drastically destabilizing flow effects. This is especially the case when one considers the larger
pitch angle here, where the fore- and aft-wings would be much closer in terms of height separation. Similarly, even though the flow behavior depicted in
Figure 7b(iii) appears to be severe, the lift generation does not appear to suffer, as will be seen in the lift coefficient results later. It should be noted that while the present simulations are able to predict these flow separations, the present RANS approach with the Spalart–Allmaras turbulence model was meant to capture the general mean flow and aerodynamics trends in mind. Numerical approaches with higher-order turbulence modelling that are better in predicting their unsteady flow behavior at higher fidelity levels would likely provide more accurate predictions and transient flow characteristics, if appropriate computational resources and time are available.
3.2. Lift and Drag Characteristics under Pitch Conditions without Yaw
The impact of the flow behavior observed in
Figure 4,
Figure 5,
Figure 6 and
Figure 7 can be better discerned from
Figure 8, where detailed breakdowns of the lift and drag coefficients contributed by the five physical components of the UAV (i.e., fore- and aft-wings, fuselage, wing joint, and vertical stabilizer) are shown. As the overall lift and drag coefficients of the entire UAV itself have been presented and discussed previously by [
12], they will not be covered here for the sake of brevity. In
Figure 8a, where different lift coefficient components are shown, it can be discerned that the wing joint is unsurprisingly insensitive towards the pitch angle, due to its vertical orientation and small physical size. Having said that, the vertical stabilizer does demonstrate lift increments as the pitch angle increases, even though the maximum lift reaches an asymptotic value of approximately
. Upon closer inspection, in conjunction with
Figure 4 and
Figure 5, this could be explained by the proximity of the vortex roll-ups on both sides of the vertical stabilizer, which could have led to corresponding low-pressure regions and hence minor lift generation. In contrast, the fuselage produces moderate lift levels that grow relatively linearly with the pitch angle throughout the test range. This can be accounted for by the formation of the vortex roll-ups and their growing strengths as the pitch angle increases. Note that the maximum pitch angle of
used here remains sufficiently moderate for the ogive-tip cylinder, such that the vortex roll-ups do not abruptly detach themselves away from the fuselage with a corresponding sudden reduction in lift levels. Last but not least, the lift coefficient contributions from the fore- and aft-wings exhibit complementary behavior. While the aft-wing produces comparatively higher lift levels over the fore-wing up until
, the former stalls at
and its lift level subsequently drops thereafter. However, the fore-wing continues to see lift increments until it stalls at a significantly higher pitch angle of
with much shallower lift reductions after that. The end result of this is highly beneficial, sustained high lift levels until the maximum pitch angle of
investigated here.
As for the drag coefficient contributions shown in
Figure 8b, the trends exhibited by the wing joint and vertical stabilizer are relatively similar to their lift coefficient counterparts, where their contributions remain small. Drag coefficient behavior for both fore-and aft-wings does not show significant deviations as well, with both contributing moderately low drag levels up to
. However, they do quickly increase as the pitch angle increases further. As for the fuselage, it makes the largest contribution towards the overall drag levels and, being the component that incurs the largest flow blockage, this does not come as a surprise. In fact, fuselage drag level is approximately 3.5 to 5 times that of the fore- and aft-wing drag levels at
. However, as the pitch angle increases, their discrepancies reduce drastically as the fore- and aft-wing drag levels increase substantially. Nevertheless, it is clear that while the ogive cylinder tip provides additional lift over the joined wings through the vortex roll-ups, it also produces significant drag levels. At this point, a few notions can be surmised from
Figure 8. Firstly, through the use of the present joined-wing design, the UAV stalls at a much higher pitch angle than if only the fore-wing was used, as with most other conventional fixed-wing UAVs. Secondly, the ability of the ogive cylinder tip to generate additional lift by producing vortex roll-ups may be useful for further stall-delaying efforts. However, this consideration will have to take into account the drag penalty that accompanies such a configuration and specific mission requirements for the UAV.
3.3. Effects of Yaw on Flow Characteristics
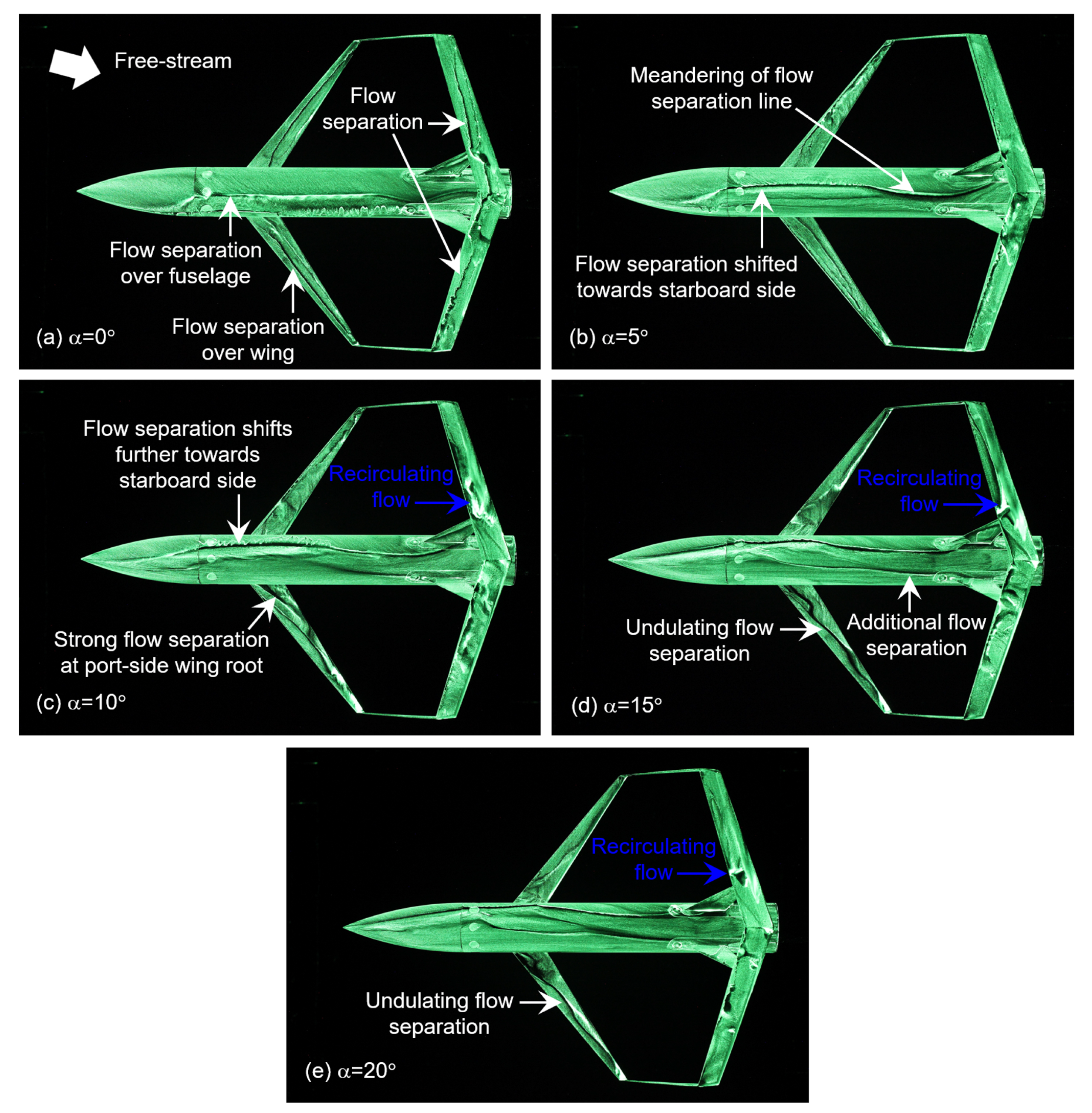
Figure 9 and
Figure 10 show comparisons between the experimental surface oil flow visualizations and numerical surface streamlines when the UAV is pitched at
, and
with a non-zero yaw angle of
imposed. The imposition of a
yaw angle leads to an asymmetric flow behavior, where flow separations over much of the straight cylindrical fuselage along the port side can be observed in
Figure 9a. Note that this flow separation does not lead to formation of the ogive vortex roll-ups. Clear flow separations can also be discerned along all fore- and aft-wings. As the pitch angle increases to
and beyond, the flow separation line(s) shift gradually towards the starboard side, with some meandering occurring just upstream of the vertical stabilizers. A second fuselage flow separation appears to manifest on the port side of the first one at a pitch angle of
, where they have very similar trajectories along the cylindrical fuselage. However, they become rather complex and interact with one another at a pitch angle of
. It cannot be ascertained at this point if the two fuselage flow separations actually produce the ogive vortex roll-ups, though that is unlikely to be the case due to the yaw direction. Flow separations along the aft-wings will also evolve to produce small recirculating flow regions that persist until
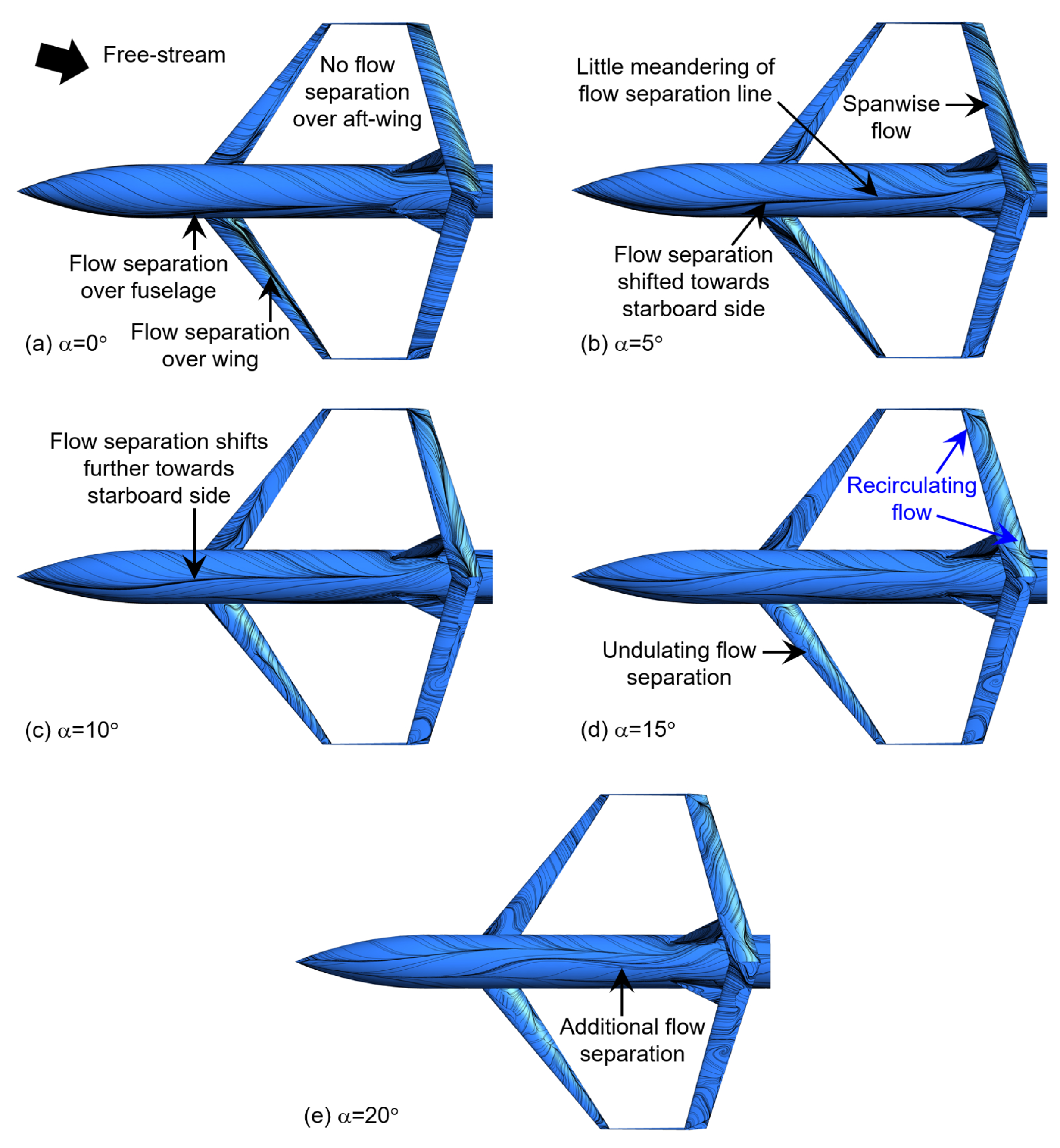
. As for the flow separations along the fore-wings, it is interesting to note that they become more convoluted and stronger (presumably due to the fuselage flow separations) as pitch angle increases and take on undulating distributions along the wingspan at higher pitch angles. The numerical results in
Figure 10 show general agreements, though aft-wing flow separations are predicted later with less meandering of the flow separation line observed. Additionally, the complex flow separation behavior at
is not predicted numerically either. With regards to flow influences conferred by the fore-wing upon the aft-wing, it is challenging to differentiate between them and effects caused by the non-zero yaw angle. However, if one were to take a closer look at
Figure 10a–c, the streamlines along the aft-wing indicate that they are more or less aligned with the yaw angle, with little interference coming off the fore-wing. In contrast, the streamline patterns on the aft-wing at higher pitch angles of
and
do not reflect that, thereby suggesting that the fore-wing is likely to impart more flow effects upon the aft-wing at higher pitch angles, similar to the non-yawed test cases. In fact, results associated with a
yaw angle to be presented later show relatively similar outcomes.
When the yaw angle doubles to
, as shown in the experimental surface oil flow visualizations in
Figure 11, fuselage flow separation behavior remains largely similar, even though it becomes more complex earlier, from
. In contrast to the
yaw angle, however, there is significantly less meandering of the flow separation lines. As for the fore- and aft-wings, flow separations over them are also more complex than those observed for a smaller yaw angle of
. Numerical results captured for the same yaw angle of
shown in
Figure 12 predicted the fuselage flow separations, though they are not located as much towards the starboard side as the experimental results. Additionally, flow separations over the fore- and aft-wings are not that well-predicted by the numerical results, particularly at higher pitch angle angles of
and beyond. Nevertheless, the numerical results provide an acceptable appreciation of the most significant differences between the two yaw angles studied here.
3.4. Effects of Yaw on Lift and Drag Characteristics
As mentioned earlier, one of the aims here is to understand how the UAV will behave aerodynamically under non-zero sideslip conditions (i.e., non-zero yaw) in combination with non-zero pitch angle for a more realistic assessment of its performance. As such, experiments and simulations were conducted to assess its lift, drag, and lateral force coefficients across different pitch angles from
to
, in conjunction with two different yaw angles of
and
. These two yaw angles were selected to represent small and moderate sideslip conditions, respectively, and the results are presented in
Figure 13. At a small yaw angle of
, no stall occurs within the pitch angle range tested and drag levels increase moderately from
as well. The lift and drag trends and levels are also relatively similar to what had been reported by [
12] without yaw, which indicates that small sideslip conditions do not alter the aerodynamic characteristics much. Additionally, the lateral force coefficient remains moderate and stable, although it does increase slightly as the pitch angle increases. Equally important is the fact that there is good agreement between the experiments and simulations, despite the simulations predicting slightly lower lift coefficients. With a larger yaw angle of
, however, the discrepancies in the lift coefficient between the experiments and simulations become more significant. While the trends remain similar with steady lift increments as the pitch angle increases, the lift coefficients predicted by the simulations progressively become lower than the experiments. This suggests that the simulations could be significantly under-predicting pressure differentials or over-predicting flow separations for the joined wings under significant sideslip conditions, evident from the surface flow patterns presented in
Figure 11 and
Figure 12. On the other hand, while discrepancies increase slightly for the lateral force coefficients, experimental and predicted drag levels continue to agree very well.
With the awareness that simulations tend to under-predict the lift coefficients under moderate yaw angles and beyond,
Figure 14 shows the experimental lift and drag coefficient results obtained across a much wider range of pitch angle and yaw angle combinations, which would reveal more about the flight envelope of the present UAV. In this case, the pitch angle ranges from
to
, while the yaw angle ranges from
to
. One thing to note before going into the details is that the lift coefficient continues to increase as the pitch angle used increases, regardless of the exact yaw angle. However, the increment becomes smaller despite the constant
pitch angle intervals used and that would be due to the complex flow interactions when yaw angle varies. As
Figure 14a shows, the lift coefficients remain relatively stable across the entire yaw angle range at small pitch angles of
and
. On the other hand, moderate pitch angles of
and
lead to progressively lower lift coefficients once the yaw angle reaches
and beyond. More interesting though is that once the pitch angles reach
and
, the lift coefficient increases in general across the yaw angle range. Nevertheless, the lift behavior remains stable despite these variations, and this shows that it is not significantly affected across the yaw angle range used here. This also implies that the present UAV is expected to be stable towards any abrupt changes in the lateral direction of the free stream.
On the other hand, the drag coefficient tends to increase at a higher rate as the pitch angle increases for the same yaw angle, opposite to what had been observed for lift coefficient previously. These observations are not unexpected, however, as the imposition of non-zero yaw angles is expected to decrease lift and increase drag due to more complex flow blockages and interactions. Referring to
Figure 14b, little increase in drag is incurred across all yaw angles when pitch angle increases from
to
, but that changes when the pitch angle increases to
and beyond where drag levels increase much more substantially. Clearly, this signifies that a significant drop in the lift-to-drag ratio occurs when large pitch angle and yaw angle combinations are used. Next,
Figure 15 shows the yawing and rolling moment coefficients obtained experimentally, where they will be analyzed as markers of directional and lateral stabilities. Note that good directional and lateral stabilities are typically represented by positive and negative yawing and rolling moment slopes, respectively, as described by [
33], and that is indeed the case shown in
Figure 15, save for some instances. However, those instances tend to occur mostly at high pitch angles at
to
, which the UAV is unlikely to operate at for prolonged periods of time. It should also be highlighted that
Figure 15b shows that the rolling moment slopes are sometimes close to zero when small pitch angles are used, which suggest that the statically neutral state may require external interventions to correct any perturbations. Nonetheless, results seen thus far prove that the present UAV generally possesses adequate directional and lateral stability, and flight control surfaces could be used to correct for any instabilities.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}