
A Model-Based Prognostic Framework for Electromechanical Actuators Based on Metaheuristic Algorithms



Abstract
1. Introduction
2. Related Work
3. Materials and Methods
- : Dry friction. When , the resulting friction is the nominal value multiplied by three.
- : Backlash. When , the backlash magnitude is the nominal value multiplied by one hundred.
- , , : Short circuit (SC). Being a three-phase motor, each coefficient is linked to a short circuit in one phase.
- , : Static eccentricity. These coefficients are linked to the modulus and phase of the eccentricity in the rotor. Under nominal conditions, the phase corresponds to 0 rad, so .
- : Proportional gain drift (PGD). is linked to an increase of 50 per cent in the proportional gain, while determines a 50 per cent decrease. The nominal value is .
3.1. Employed Algorithms
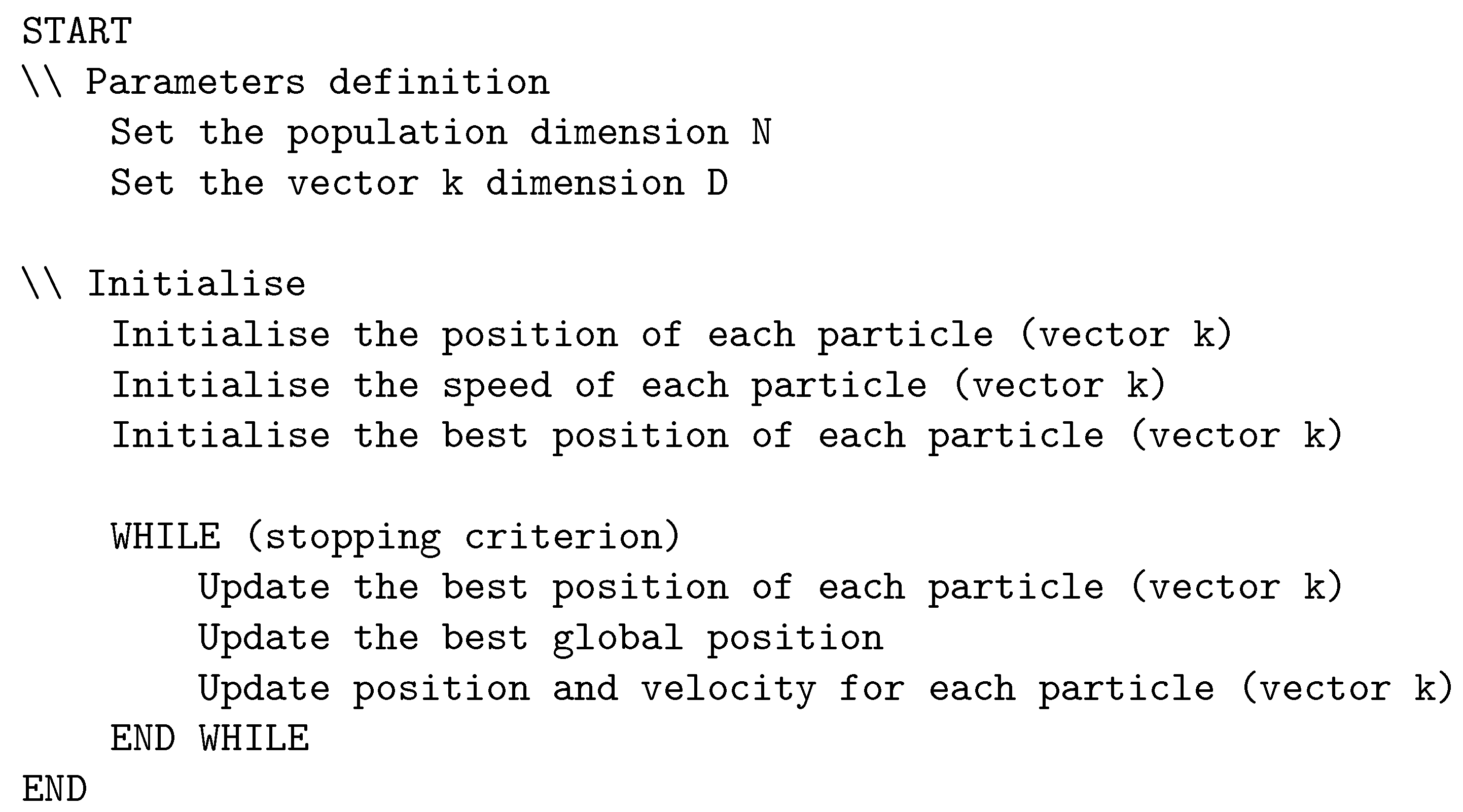
- PSO, since it resulted as one of the most used ones;
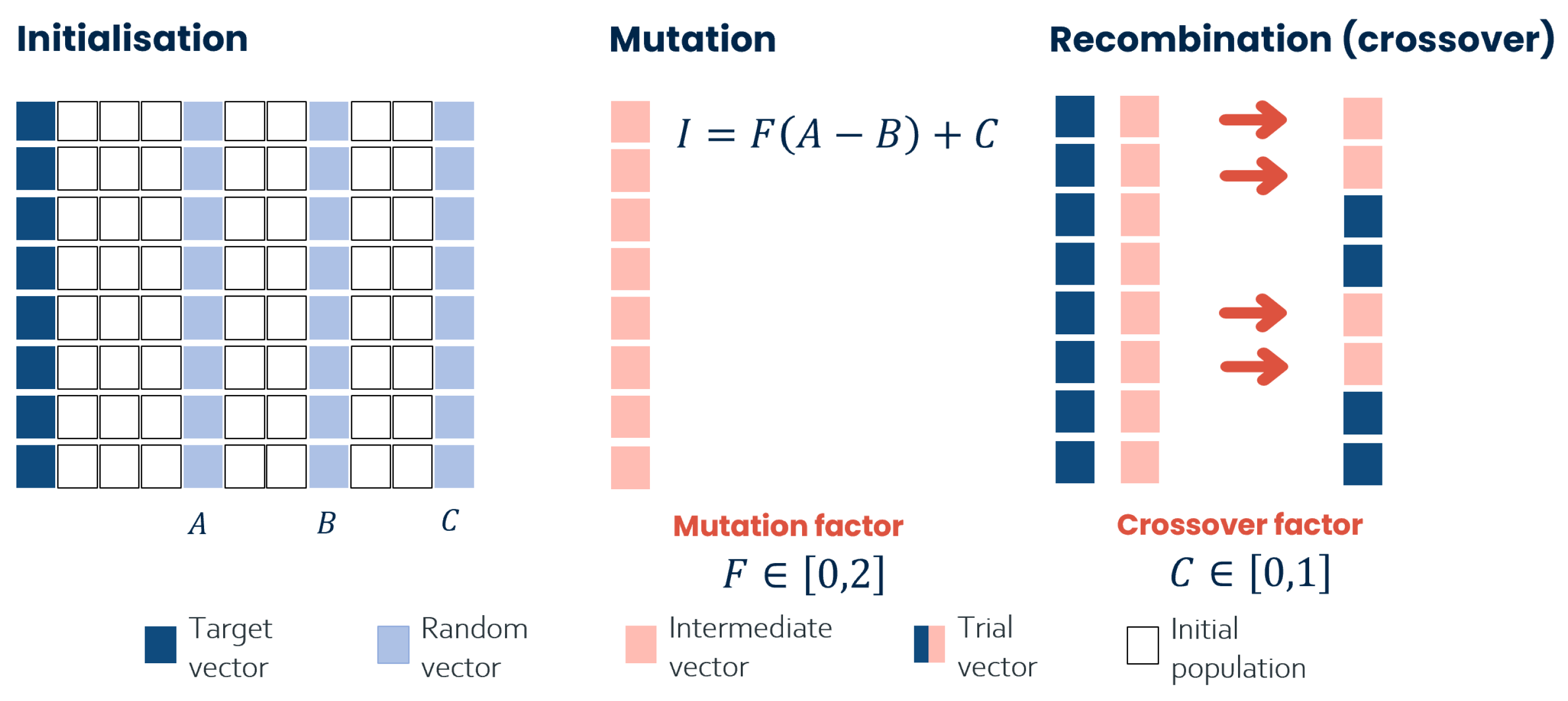
- DE, to represent the evolutionary algorithm category;
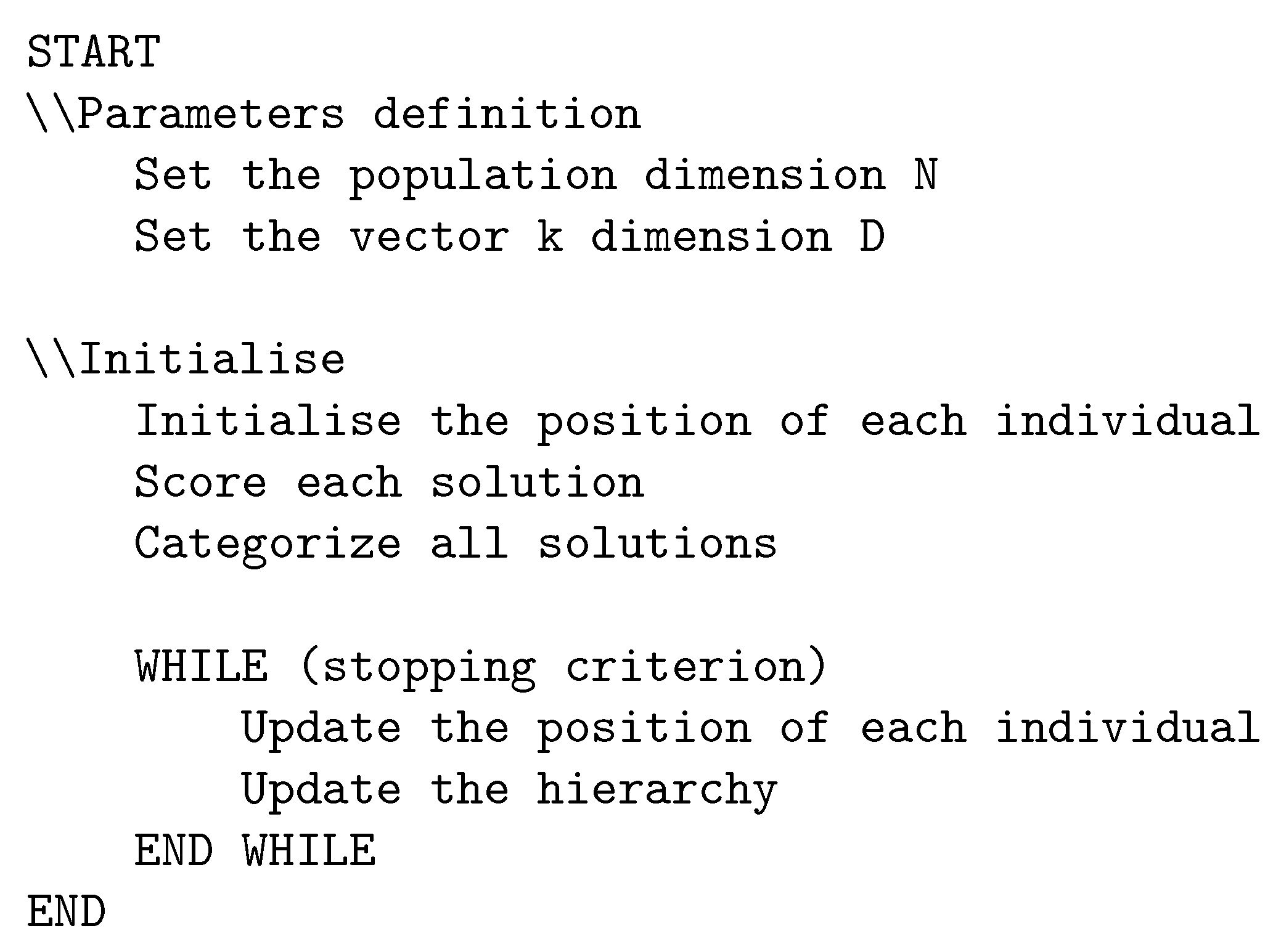
- GWO, which we selected among new algorithms.
3.1.1. Evolutionary Algorithms
- Population: The solution “pool”, which is initialized at the start of the process;
- Variety: The population must be varied enough to explore the solution space effectively;
- Heredity: This values is linked to the capability of passing a characteristic to the offspring;
- Selection: For artificial algorithms, selection must only occur in the desired direction, which is a key parameter to ensure that only the best solutions will be reproduced.
3.1.2. Swarm Intelligence Methods
3.2. Models
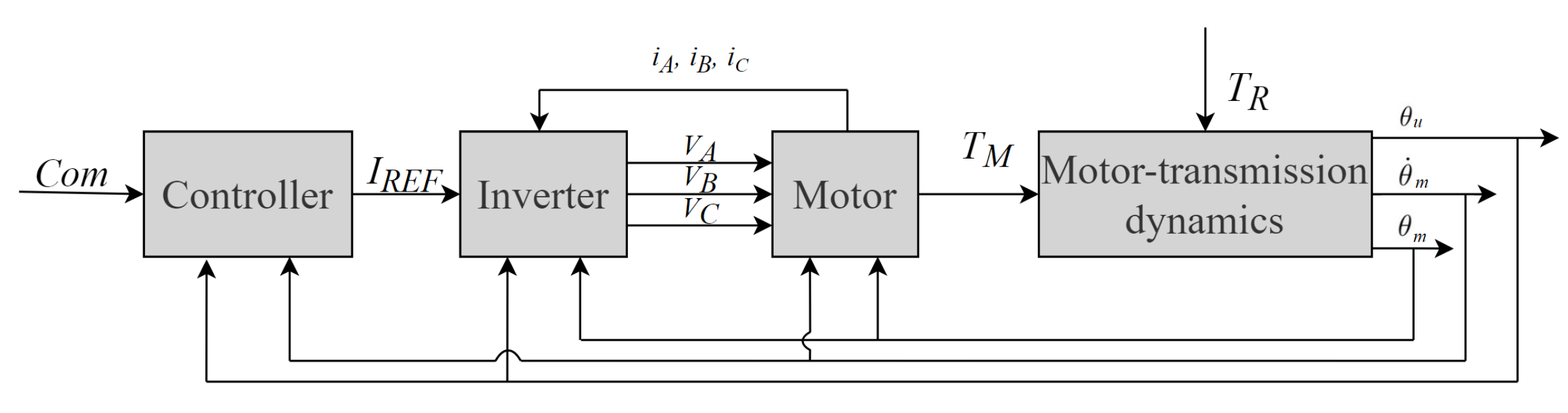
- Controller: This block is essentially composed of a PID controller. In fact, even if there are much more advanced and sophisticated control logics (e.g., [53]), PID controllers are still the way to go and they are still chosen even in complex systems, as they are easy to implement and tune. PID controllers are composed of three separated branches, where the proportional, differential, and integral action are calculated. The controller aim is comparing the command signals with the actual signal obtained from the motor transmission dynamics block, hence closing the control loop. In this particular case, both position and speed can be monitored. This block outputs the reference current , obtained from the motor torque thanks to the torque constant, which is finally passed to the inverter.
- Inverter: This block contains Clarke-Park equations, and it provides the motor block with the three voltages (one for each phase) for the PMSM motor by performing the corresponding pulse width modulation (PWM). A very complicated physics-based process is handled by Simscape, a specific Simulink library, capable of providing electrical simulation packages. The main actions inside this block are the calculation of the electrical angle starting from the motor position, the splitting of into the three phase currents (with Clarke-Park equations), the PWM process, and the calculation of the three phase voltages, using the fed-back currents.
- Sinusoidal BLDC motor: This block is able to simulate the electrical and magnetic interactions inside a PMSM. It contains Simscape elements, and it manages three main processes:
- The calculation of the counter-electromotive force coefficient for each phase. This is achieved with the multiplication of the back EMF coefficients (obtained with experimental test campaigns) with three sine waves out of phase from each other.
- The implementation of the motor resitive-inductive circuit. A set of mathematical equations (Equation (5)) that model the three star connected LR branches is solved and phase currents () are, hence, calculated. The resistance and inductance of the motor are taken from equipment data sheets.where and are the currents and voltages across a single j phase.
- The calculation of the motor available torque. Three different electromotive coefficients are used to calculate the motor torque along with the relative phase currents:
- Motor transmission dynamics: this final block compares the available torque with the external requested torque and solves a second-order dynamical system (Equation (7) comprehensive of multiple non linearities, such as dry friction and backlash [52]). The outputs of this block are the motor position and speed, which are looped back to the controller.where represents the motor torque, and represents the external torque. On the other hand, represents the assembly inertia, is the viscous friction coefficient, and is the motor position.
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MEA | More Electric Aircraft |
| EMA | Electro-Mechanical Actuator |
| PHM | Prognostic and Health Management |
| PMSM | Permanent Magnet Syncrhonous Motor |
| DE | Differential Evolution |
| PSO | Particle Swarm Optimization |
| GWO | Grey Wolf Optimization |
| NTB | Numerical Test Bench |
| LCC | Life Cycle Costs |
| EHA | Electro-Hydraulic Actuators |
| CBM | Condition-Based Maintenance |
| RAMS | Reliability, Availability, Maintenability, and Safety |
| TLBO | Teaching–Learning-Based Optimization |
| HGS | Hunger Game Search |
| VNS | Variable Neighbourhood Search |
| ACO | Ant Colony Optimization |
| CSO | Cuckoo Search Optimization |
| MM | Monitoring Model |
| RM | Reference Model |
| SC | Short Circuit |
| FDI | Failure Detection and Identification |
| ConOps | Concept of Operation |
| TLP | Top Level Parameter |
| MSA | Metaheuristic Search Algorithm |
| EA | Evolutionary Algorithm |
| SI | Swarm Intelligence |
| GA | Genetic Algorithm |
| BLDC | BrushLess Direct Current |
| PID | Proportional Integral Derivative |
| PWM | Pulse Width Modulation |
| FMECA | Failure Mode Effect and Criticality Analysis |
| PC | Performance Coefficient |
| PHMC | Prognostic and Health Management Computer |
| EMF | Electro-Motive Force |
References
- Vercella, V.; Fioriti, M.; Viola, N. Towards a methodology for new technologies assessment in aircraft operating cost. Inst. Mech. Eng. Part J. Aerosp. Eng. 2021, 235, 879–892. [Google Scholar] [CrossRef]
- Hölzel, N.B.; Gollnick, V. Cost-benefit analysis of prognostics and condition-based maintenance concepts for commercial aircraft considering prognostic errors. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, PHM, Coronado, CA, USA, 18–24 October 2015. [Google Scholar]
- Berri, P.C.; Dalla Vedova, M.D.; Mainini, L. Computational framework for real-time diagnostics and prognostics of aircraft actuation systems. Comput. Ind. 2021, 132, 103523. [Google Scholar] [CrossRef]
- Gp Capt Atul, G.; Rezawana Islam, L.; Tonoy, C. Evolution of Aircraft Flight Control System and Fly-By-Light Flight Control System. Int. J. Emerg. Technol. Adv. Eng. 2013, 3, 12. [Google Scholar]
- Sutherland, J.P. Fly-by-Wire Flight Control Systems. Air Force Flight Dyn. Lab Wright-Patterson Air Force Base Ohio 1968, 3, 2250–2459. [Google Scholar]
- Telford, R.D.; Galloway, S.J.; Burt, G.M. Evaluating the reliability & availability of more-electric aircraft power systems. In Proceedings of the 2012 47th International Universities Power Engineering Conference (UPEC), Uxbridge, UK, 4–7 September 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, G.; Shi, Z.; Wang, Y.; Ma, S.; Lim, T.C. A review of electromechanical actuators for More/All Electric aircraft systems. Inst. Mech. Eng. Part J. Mech. Eng. Sci. 2018, 232, 4128–4151. [Google Scholar] [CrossRef]
- Wang, C.; Fan, I.S.; King, S. Failures Mapping for Aircraft Electrical Actuation System Health Management. In Proceedings of the PHM Society European Conference, London, UK, 27–29 May 2022; Volume 7, pp. 509–520. [Google Scholar] [CrossRef]
- Balaban, E.; Saxena, A.; Bansal, P.; Goebel, K.F.; Curran, S. A Diagnostic Approach for Electro-Mechanical Actuators in Aerospace Systems. In Proceedings of the 2009 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2009; pp. 1–13. [Google Scholar]
- Baldo, L.; Querques, I.; Dalla Vedova, M.D.L.; Maggiore, P. Prognostics of aerospace electromechanical actuators: Comparison between model-based metaheuristic methods. In Proceedings of the 12th EASN International Conference on Innovation in Aviation & Space for Opening New Horizons, Barcelona, Spain, 18–21 October 2022. [Google Scholar]
- Wileman, A.J.; Aslam, S.; Perinpanayagam, S. A road map for reliable power electronics for more electric aircraft. Prog. Aerosp. Sci. 2021, 127, 100739. [Google Scholar] [CrossRef]
- Kuznetsov, V.E.; Khanh, N.D.; Lukichev, A.N. System for Synchronizing Forces of Dissimilar Flight Control Actuators with a Common Controller. In Proceedings of the 2020 23rd International Conference on Soft Computing and Measurements, SCM 2020, St. Petersburg, Russia, 27–29 May 2020. [Google Scholar] [CrossRef]
- Benedettini, O.; Baines, T.S.; Lightfoot, H.W.; Greenough, R.M. State-of-the-art in integrated vehicle health management. Proc. Inst. Mech. Eng. Part J. Aerosp. Eng. 2009, 223, 157–170. [Google Scholar] [CrossRef]
- Lee, J.; de Pater, I.; Boekweit, S.; Mitici, M. Remaining-Useful-Life prognostics for opportunistic grouping of maintenance of landing gear brakes for a fleet of aircraft. In Proceedings of the PHM Society European Conference, London, UK, 27–29 May 2022; Volume 7, pp. 278–285. [Google Scholar]
- Scott, M.J.; Verhagen, W.J.C.; Bieber, M.T.; Marzocca, P. A Systematic Literature Review of Predictive Maintenance for Defence Fixed-Wing Aircraft Sustainment and Operations. Sensors 2022, 22, 7070. [Google Scholar] [CrossRef]
- Swerdon, G.; Watson, M.J.; Bharadwaj, S.; Byington, C.S.; Smith, M.; Goebel, K.; Balaban, E. A Systems Engineering Approach to Electro-Mechanical Actuator Diagnostic and Prognostic Development. In Proceedings of the Machinery Failure Prevention Technology (MFPT) Conference, Dublin, Ireland, 23–25 June 2009. [Google Scholar]
- Rosero, J.A.; Ortega, J.A.; Aldabas, E.; Romeral, L. Moving towards a more electric aircraft. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 9380100. [Google Scholar] [CrossRef]
- Garcia Garriga, A.; Ponnusamy, S.S.; Mainini, L. A multi-fidelity framework to support the design of More-Electric Actuation. In Proceedings of the 2018 Multidisciplinary Analysis and Optimization Conference, Atlanta, GA, USA, 25–29 June 2018; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2018. [Google Scholar] [CrossRef]
- Yin, Z.; Hu, N.; Chen, J.; Yang, Y.; Shen, G. A review of fault diagnosis, prognosis and health management for aircraft electromechanical actuators. IET Electr. Power Appl. 2022, 16, 1249–1272. [Google Scholar] [CrossRef]
- Kaplan, H.; Tehrani, K.; Jamshidi, M. A Fault Diagnosis Design Based on Deep Learning Approach for Electric Vehicle Applications. Energies 2021, 14, 6599. [Google Scholar] [CrossRef]
- Sutharssan, T.; Stoyanov, S.; Bailey, C.; Yin, C. Prognostic and health management for engineering systems: A review of the data-driven approach and algorithms. J. Eng. 2015, 2015, 215–222. [Google Scholar] [CrossRef]
- Berri, P.C.; Dalla Vedova, M.D.L.; Mainini, L. Learning for predictions: Real-time reliability assessment of aerospace systems. Aiaa J. 2022, 60, 566–577. [Google Scholar] [CrossRef]
- Dalla Vedova, M.D.; Berri, P.C.; Re, S. Metaheuristic Bio-Inspired Algorithms for Prognostics: Application to on-Board Electromechanical Actuators. In Proceedings of the 2018 3rd International Conference on System Reliability and Safety, ICSRS 2018, Barcelona, Spain, 24–26 November 2018. [Google Scholar] [CrossRef]
- Ma, Y.; Yao, M.; Liu, H.; Tang, Z. State of Health estimation and Remaining Useful Life prediction for lithium-ion batteries by Improved Particle Swarm Optimization-Back Propagation Neural Network. J. Energy Storage 2022, 52, 104750. [Google Scholar] [CrossRef]
- Li, A.; Yang, X.; Dong, H.; Xie, Z.; Yang, C. Machine Learning-Based Sensor Data Modeling Methods for Power Transformer PHM. Sensors 2018, 18, 4430. [Google Scholar] [CrossRef] [PubMed]
- Gougam, F.; Chemseddine, R.; Benazzouz, D.; Benaggoune, K.; Zerhouni, N. Fault prognostics of rolling element bearing based on feature extraction and supervised machine learning: Application to shaft wind turbine gearbox using vibration signal. Proc. Inst. Mech. Eng. Part J. Mech. Eng. Sci. 2021, 235, 5186–5197. [Google Scholar] [CrossRef]
- Rodrigues, L.R.; Coelho, D.B.P.; Gomes, J.P.P. A Hybrid TLBO-Particle Filter Algorithm Applied to Remaining Useful Life Prediction in the Presence of Multiple Degradation Factors. In Proceedings of the 2020 IEEE Congress on Evolutionary Computation (CEC), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Jin, Z.; Li, X.; Yu, D.; Zhang, J.; Zhang, W. Lithium-ion battery state of health estimation using meta-heuristic optimization and Gaussian process regression. J. Energy Storage 2023, 58, 106319. [Google Scholar] [CrossRef]
- Chen, K.; Laghrouche, S.; Djerdir, A. Health state prognostic of fuel cell based on wavelet neural network and cuckoo search algorithm. ISA Trans. 2021, 113, 175–184. [Google Scholar] [CrossRef]
- Zhong, J.; Long, J.; Zhang, S.; Li, C. Flexible Kurtogram for Extracting Repetitive Transients for Prognostics and Health Management of Rotating Components. IEEE Access 2019, 7, 55631–55639. [Google Scholar] [CrossRef]
- Hong, H.; Tsangaratos, P.; Ilia, I.; Loupasakis, C.; Wang, Y. Introducing a novel multi-layer perceptron network based on stochastic gradient descent optimized by a meta-heuristic algorithm for landslide susceptibility mapping. Sci. Total Environ. 2020, 742, 140549. [Google Scholar] [CrossRef]
- Ladj, A.; Benbouzid-Si Tayeb, F.; Varnier, C. An integrated prognostic based hybrid genetic-immune algorithm for scheduling jobs and predictive maintenance. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 2083–2089. [Google Scholar] [CrossRef]
- Ladj, A.; Tayeb, F.B.S.; Varnier, C. Hybrid of metaheuristic approaches and fuzzy logic for the integrated flowshop scheduling with predictive maintenance problem under uncertainties. Eur. J. Ind. Eng. 2021, 15, 675–710. [Google Scholar] [CrossRef]
- Wu, Y. A survey on population-based meta-heuristic algorithms for motion planning of aircraft. Swarm Evol. Comput. 2021, 62, 100844. [Google Scholar] [CrossRef]
- Rodrigues, L.R.; Gomes, J.P.P.; Ferri, F.A.S.; Medeiros, I.P.; Galvão, R.K.H.; Nascimento Júnior, C.L. Use of PHM Information and System Architecture for Optimized Aircraft Maintenance Planning. IEEE Syst. J. 2015, 9, 1197–1207. [Google Scholar] [CrossRef]
- Berri, P.C.; Dalla Vedova, M.D.L.; Maggiore, P. A Simplified Monitor Model for EMA Prognostics. In Proceedings of the MATEC Web of Conferences, Osaka, Japan, 21–22 September 2018; EDP Sciences: Les Ulis, France, 2018. [Google Scholar]
- Berri, P.C.; Dalla Vedova, M.D.L.; Maggiore, P.; Viglione, F. A simplified monitoring model for PMSM servoactuator prognostics. In Proceedings of the MATEC Web of Conferences, Osaka, Japan, 21–22 September 2018; EDP Sciences: Les Ulis, France, 2019; p. 04013. [Google Scholar]
- Dalla Vedova, M.D.; Berri, P.C.; Re, S. A comparison of bio-inspired meta-heuristic algorithms for aircraft actuator prognostics. In Proceedings of the 29th European Safety and Reliability Conference, ESREL, Hannover, DE, USA, 22–26 September 2019. [Google Scholar] [CrossRef]
- Kim, B.W.; Kim, K.T.; Hur, J. Simplified Impedance Modeling and Analysis for Inter-Turn Fault of IPM-type BLDC motor. J. Power Electron. 2012, 12, 10–18. [Google Scholar] [CrossRef]
- Berri, P.C. Design and Development of Algorithms and Technologies Applied to Prognostics of Aerospace Systems. Ph.D. Thesis, Politecnico di Torino, Torino, Italy, 2021. [Google Scholar]
- Querques, I. Prognostics of On-Board Electromechanical Actuators: Bio-Inspired Metaheuristic Algorithms; Technical Report; Politecnico di Torino: Torino, Italy, 2021. [Google Scholar]
- Wahde, M. Biologically Inspired Optimization Methods: An Introduction; WIT Press: Ashurst, UK, 2008. [Google Scholar]
- Ahmad, M.F.; Isa, N.A.M.; Lim, W.H.; Ang, K.M. Differential evolution: A recent review based on state-of-the-art works. Alex. Eng. J. 2022, 61, 3831–3872. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Aimasso, A.; Berri, P.C.; Dalla Vedova, M.D. A genetic-based prognostic method for aerospace electromechanical actuators. Int. J. Mech. Control 2021, 22, 195–206. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Darwish, A. Bio-inspired computing: Algorithms review, deep analysis, and the scope of applications. Future Comput. Inform. J. 2018, 3, 231–246. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Kumar, V.; Kumar, D. An astrophysics-inspired Grey wolf algorithm for numerical optimization and its application to engineering design problems. Adv. Eng. Softw. 2017, 112, 231–254. [Google Scholar] [CrossRef]
- Berri, P.C.; Dalla Vedova, M.D.L.; Maggiore, P.; Scanavino, M. Permanent Magnet Synchronous Motor (PMSM) for Aerospace Servomechanisms: Proposal of a Lumped Model for Prognostics. In Proceedings of the 2018 2nd European Conference on Electrical Engineering and Computer Science (EECS), Bern, Switzerland, 20–22 December 2018; pp. 471–477. [Google Scholar]
- Berri, P.C.; Dalla Vedova, M.D.; Maggiore, P. A lumped parameter high fidelity EMA model for model-based prognostics. In Proceedings of the 29th European Safety and Reliability Conference, ESREL 2019, Hannover, Germany, 22–26 September 2019; Research Publishing Services: Singapore, 2020; pp. 1086–1093. [Google Scholar] [CrossRef]
- Baldo, L.; Berri, P.C.; Dalla Vedova, M.D.L.; Maggiore, P. Experimental Validation of Multi-fidelity Models for Prognostics of Electromechanical Actuators. In Proceedings of the PHM Society European Conference, Turin, Italy, 6–8 July 2022; Volume 7, pp. 32–42. [Google Scholar]
- Bendjedia, M.; Tehrani, K.A.; Azzouz, Y. Design of RST and Fractional Order PID Controllers for an Induction Motor Drive for Electric Vehicle Application. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives, Manchester, UK, 8–10 April 2014. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TLP | Physical Failure | Effect at | Effect at |
|---|---|---|---|
| Dry friction | No effect (Nominal friction) | of nominal friction | |
| Backlash | No effect (Nominal backlash) | 100 times nominal backlash | |
| Short circuit (Phase A) | No effect (No SC on Phase A) | Complete SC on phase A | |
| Short circuit (Phase B) | No effect (No SC on phase B) | Complete SC on phase B | |
| Short circuit (Phase C) | No effect (No SC on phase C) | Complete SC on phase C | |
| Eccentricity modulus | No effect (No eccentricity) | Maximum Eccentricity | |
| Eccentricity phase | |||
| PGD | of nominal proportional gain | of nominal proportional gain |
| Characteristic | Value |
|---|---|
| Rated speed (100 K) | 2000 rpm |
| Number of poles | 8 |
| Rated torque (100 K) | 5.3 Nm |
| Rated current | 3.0 A |
| Static torque (60 K) | 5.00 Nm |
| Static torque (100 K) | 6.0 Nm |
| Stall current (60 K) | 2.55 A |
| Stall current (100 K) | 3.15 A |
| Efficiency | 90.00 |
| Failures | DE | PSO | GWO | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Time (s) | Err. (%) | PC (%) | Time (s) | Err. (%) | PC (%) | Time (s) | Err. (%) | PC (%) | |
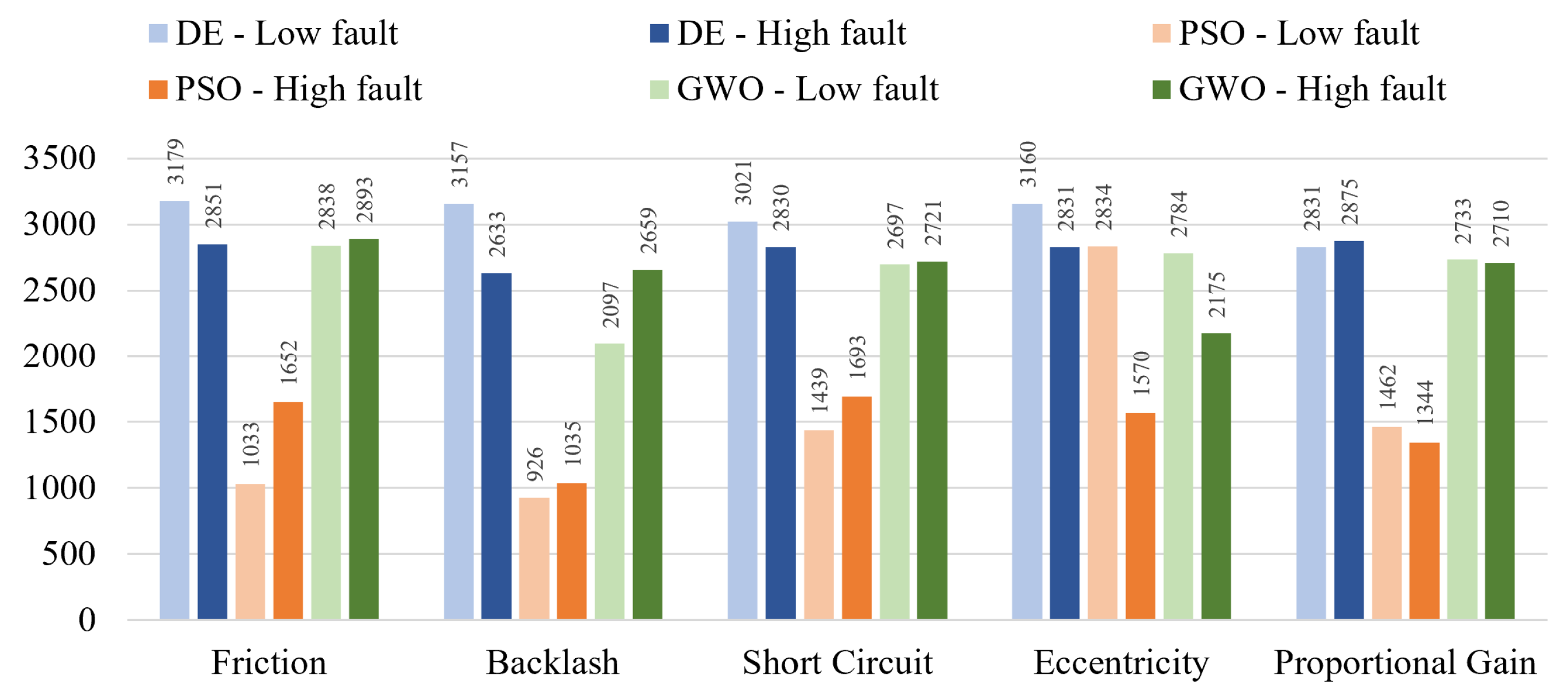
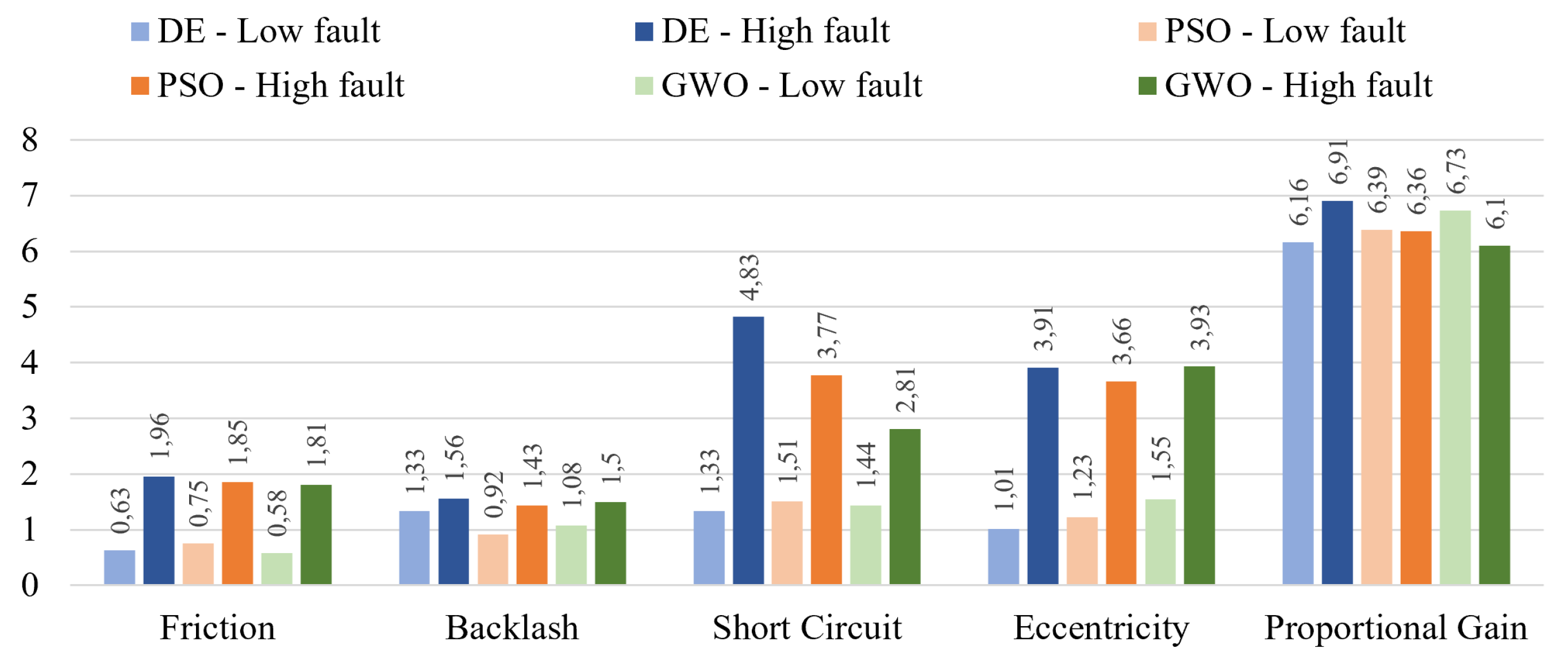
| Friction | 3015 | 1.30 | 56.97 | 1342.5 | 1.30 | 80.76 | 2865.5 | 1.20 | 62.26 |
| Backlash | 2895 | 1.45 | 50.21 | 980.5 | 1.18 | 86.28 | 2378 | 1.28 | 63.49 |
| Short Circuit | 2925.5 | 3.08 | 52.32 | 1566 | 2.64 | 78.12 | 2709 | 2.13 | 69.54 |
| Eccentricity | 2995.5 | 2.46 | 62.30 | 2202 | 2.45 | 72.45 | 2479.5 | 2.75 | 65.24 |
| Prop. Gain | 2853 | 6.54 | 58.61 | 1403 | 6.38 | 80.14 | 2721.5 | 6.42 | 61.24 |
| Total | 2936.8 | 2.96 | 56.75 | 1498.8 | 2.79 | 79.24 | 2530.7 | 2.75 | 64.00 |
| Time (s) | Err. (%) | PC (%) | |
|---|---|---|---|
| DE | 1777.0 | 4.21 | 60.95 |
| PSO | 1131.4 | 3.37 | 80.09 |
| GWO | 1816.6 | 4.33 | 58.94 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baldo, L.; Querques, I.; Dalla Vedova, M.D.L.; Maggiore, P. A Model-Based Prognostic Framework for Electromechanical Actuators Based on Metaheuristic Algorithms. Aerospace 2023, 10, 293. https://doi.org/10.3390/aerospace10030293
Baldo L, Querques I, Dalla Vedova MDL, Maggiore P. A Model-Based Prognostic Framework for Electromechanical Actuators Based on Metaheuristic Algorithms. Aerospace. 2023; 10(3):293. https://doi.org/10.3390/aerospace10030293
Chicago/Turabian StyleBaldo, Leonardo, Ivana Querques, Matteo Davide Lorenzo Dalla Vedova, and Paolo Maggiore. 2023. "A Model-Based Prognostic Framework for Electromechanical Actuators Based on Metaheuristic Algorithms" Aerospace 10, no. 3: 293. https://doi.org/10.3390/aerospace10030293
APA StyleBaldo, L., Querques, I., Dalla Vedova, M. D. L., & Maggiore, P. (2023). A Model-Based Prognostic Framework for Electromechanical Actuators Based on Metaheuristic Algorithms. Aerospace, 10(3), 293. https://doi.org/10.3390/aerospace10030293