
An Improved Fault Detection and Isolation Method for Airborne Inertial Navigation System/Attitude and Heading Reference System Redundant System

Abstract
:1. Introduction
2. Traditional Generalized Likelihood Test Fault Detection for Redundant Systems
- (1)
- The three sets of subsystems are installed in the same direction and are parallel, and the inertial devices can be unified to the same coordinate origin;
- (2)
- The inertial devices for each subsystem are mounted orthogonally in three axes.
3. Principal Component Parity Vector-Based Sequential Weighted Generalized Likelihood Ratio Test Fault Detection for Inertial Navigation System/Attitude and Heading Referential System Redundant System
3.1. Principal Component Parity Vector Method
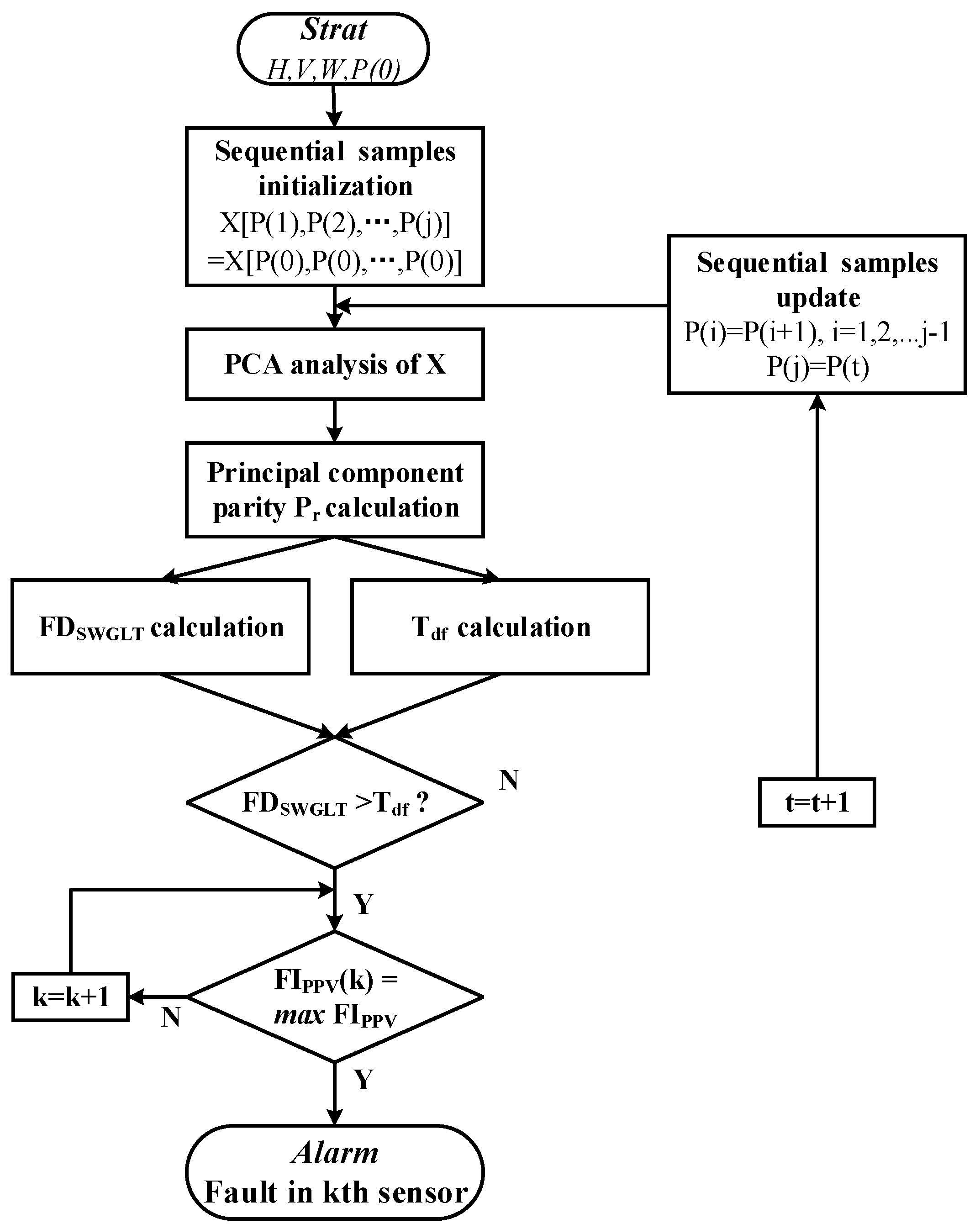
3.2. Principal Component Parity Vector-Based Sequential Weighted Generalized Likelihood Ratio Test Fault Detection
- Step 1 is the sequential parity vector sampling matrix initialization.
- Step 2 is the PCA analysis, and the construction of principal component parity vector Pr.
- Step 3 is the SWGLT fault detection function calculation; if , we proceed to the next step; otherwise, we return to step 2.
- Step 4 is the SWGLT fault isolation function calculation, where the failed subsystem is isolated and the fault alarm is reported.
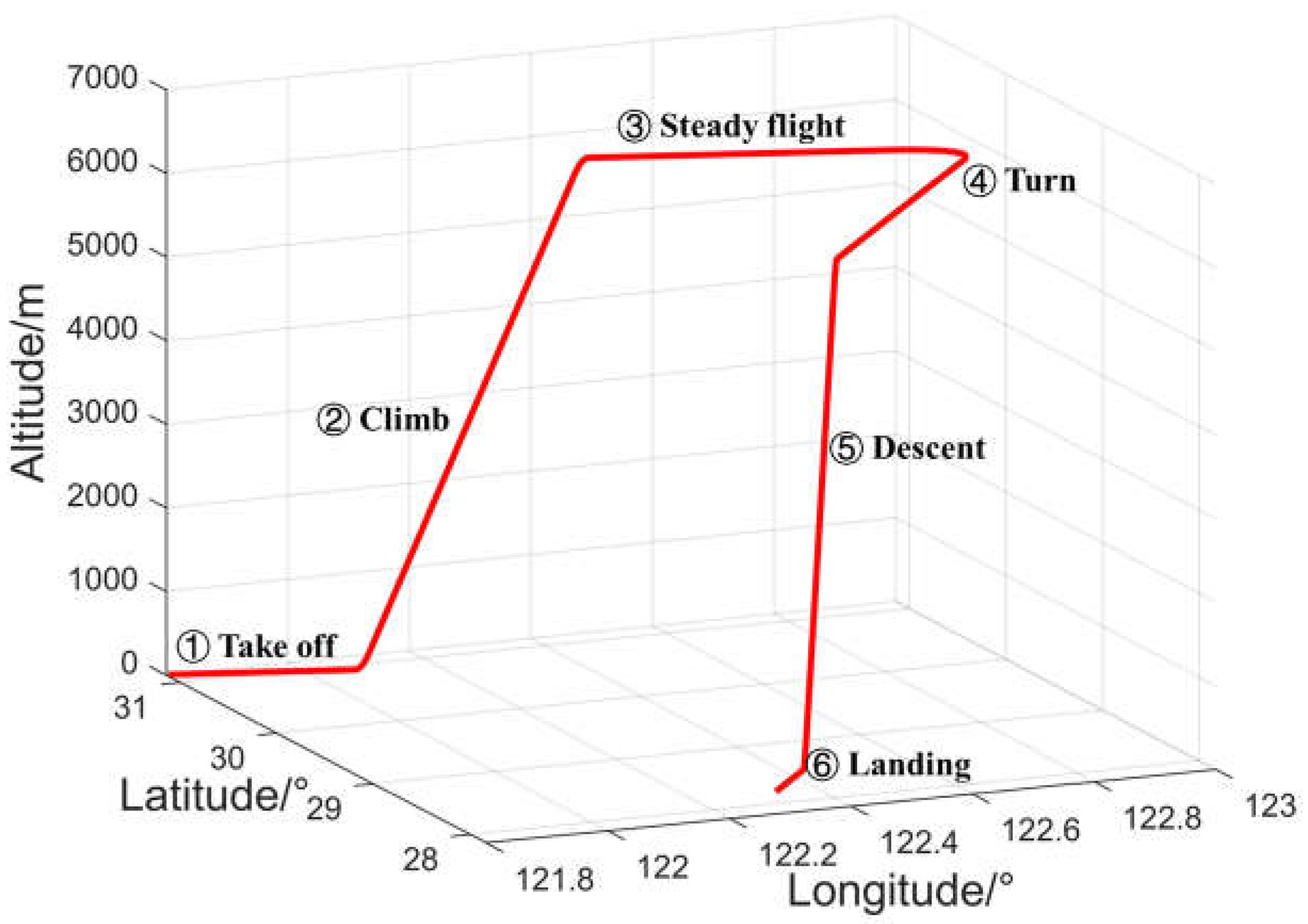
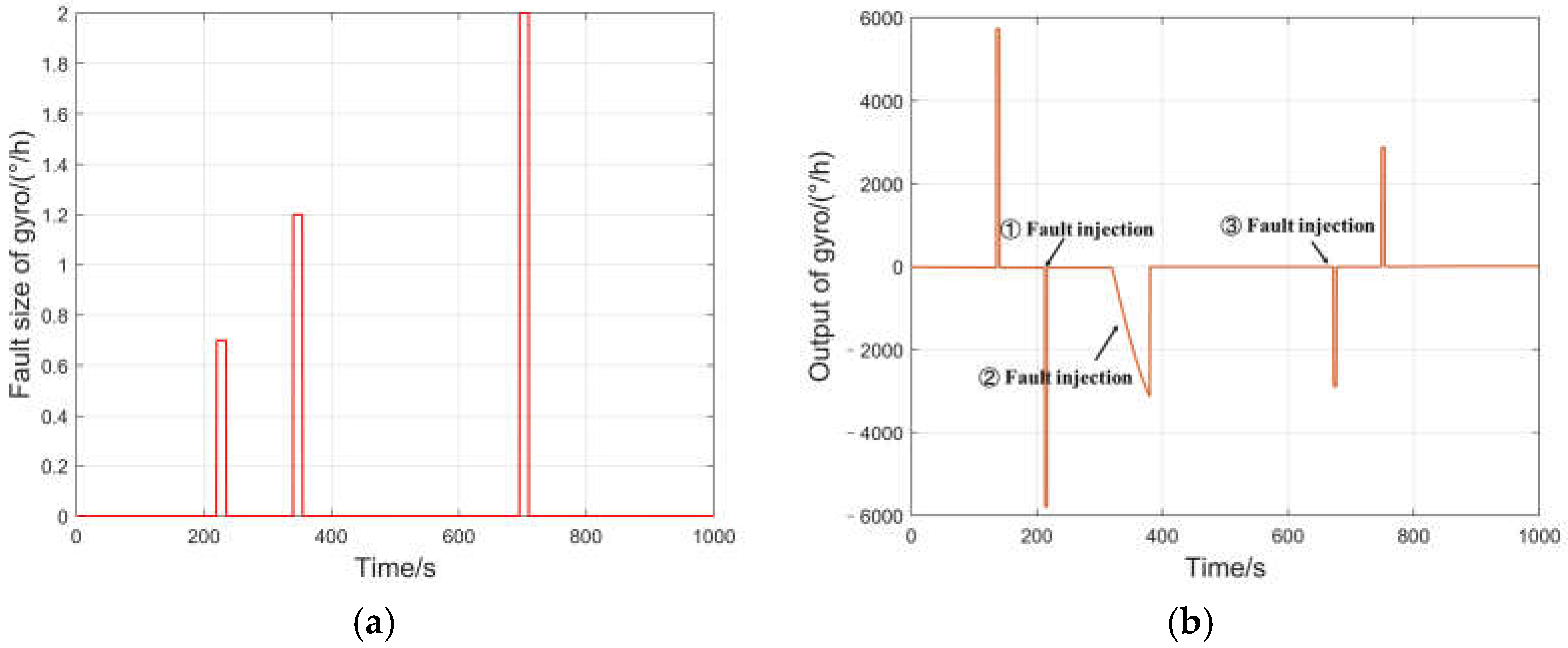
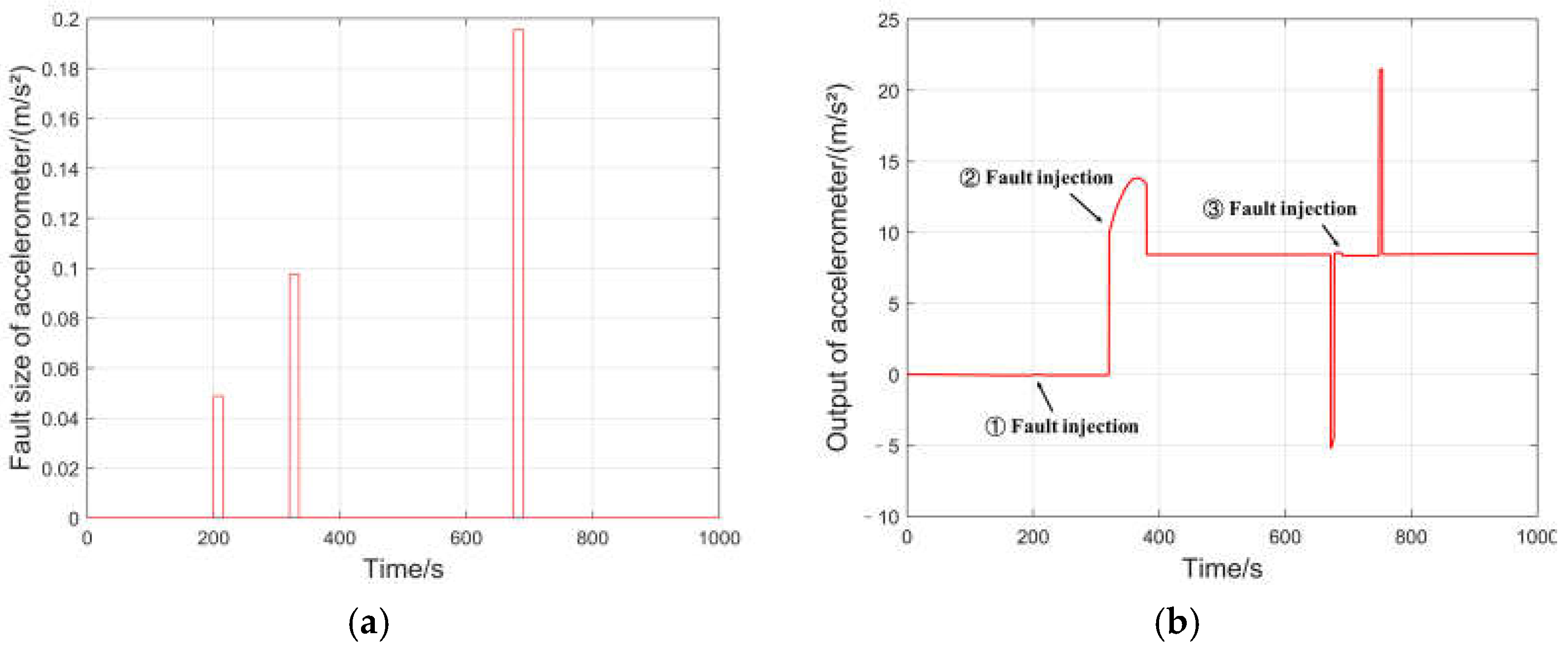
4. Experimental Setup
5. Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| RNP | Required navigation performance |
| INS | Inertial navigation system |
| GLT | Generalized likelihood ratio |
| AHRS | Attitude and heading reference system |
| IMA | Integrated modular avionics |
| FMS | Flight management system |
References
- Joint Planning and Development Office (JPDO). Concept of Operations for the Next Generation Air Transportation System; JPDO: Washington, DC, USA, 2013. [Google Scholar]
- SESAR Consortium. The ATM Target of Operations; SESAR Consortium: Brussels Belgium, 2007. [Google Scholar]
- International Civil Aviation Organization (ICAO). Doc 9750: 2016–2030 Global Air Navigation Plan; ICAO: Montréal, QC, Canada, 2016. [Google Scholar]
- Civil Aviation Administration of China (CAAC). Statistical Bulletin on the Development of Civil Aviation Industry of 2019; CAAC: Beijing, China, 2020. [Google Scholar]
- International Civil Aviation Organization (ICAO). Doc 9613: Performance Based Navigation (PBN) Manual; ICAO: Montréal, QC, Canada, 2013. [Google Scholar]
- Jiang, W.; Li, Y.; Rizos, C. A multisensor navigation system based on an adaptive fault-tolerant GOF algorithm. IEEE Trans. Intell. Transp. 2017, 18, 103–113. [Google Scholar] [CrossRef]
- Aeronautical Radio, Incorporated (ARINC). ARINC 702A: Advanced Flight Management Computer System; ARINC: Annapolis, MD, USA, 2018. [Google Scholar]
- Aeronautical Radio, Incorporated (ARINC). ARINC 704: Inertial Reference System; ARINC: Annapolis, MD, USA, 2018. [Google Scholar]
- Gilmore, J.P.; McKern, R.A. A redundant strapdown inertial reference unit (SIRU). J. Spacecr. Rocket. 1972, 9, 39–47. [Google Scholar] [CrossRef]
- Fazal, Q.; Liaquat, M.; Iftikhar, M. Robust fault tolerant control of an unmanned aerial vehicle in the presence of actuator faults. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 757–763. [Google Scholar]
- Liu, S.; Lyu, P.; Lai, J.; Yuan, C.; Wang, B. A fault-tolerant attitude estimation method for quadrotors based on analytical redundancy. Aerosp. Sci. Technol. 2019, 93, 105290. [Google Scholar] [CrossRef]
- Nobahari, H.; Mohammadkarimi, H. Application of model aided inertial navigation for precise altimetry of Unmanned Aerial Vehicles in ground proximity. Aerosp. Sci. Technol. 2017, 69, 650–658. [Google Scholar] [CrossRef]
- Lu, J.; Hu, M.; Yang, Y.; Dai, M. On-Orbit Calibration Method for Redundant IMU Based on Satellite Navigation & Star Sensor Information Fusion. IEEE Sens. J. 2020, 20, 4530–4543. [Google Scholar]
- Allerton, D.J.; Jia, H. A review of multi-sensor fusion methodologies for aircraft navigation systems. J. Navig. 2005, 58, 405–417. [Google Scholar] [CrossRef]
- Li, D.; Wang, Y.; Wang, J.; Wang, C.; Duan, Y. Recent advances in sensor fault diagnosis: A review. Sens. Actuators A Phys. 2020, 309, 111990. [Google Scholar] [CrossRef]
- Zhai, X.; Ren, Y.; Wang, L.; Zhu, T.; He, Y.; Lv, B. A review of redundant inertial navigation technology. In Proceedings of the 2021 International Conference on Computer, Control and Robotics (ICCCR), Shanghai, China, 8–10 January 2021; pp. 272–278. [Google Scholar]
- Realpe, M.; Vintimilla, B.; Vlacic, L. Sensor fault detection and diagnosis for autonomous vehicles. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2015; Volume 30, p. 04003. [Google Scholar]
- Chen, T.; You, R. A novel fault- tolerant sensor system for sensor drift compensation. Sens. Actuators A 2008, 147, 623–632. [Google Scholar] [CrossRef]
- Dai, X.; Lin, Z.; Zhen, S. Fault Tolerant Control in Redundant Inertial Navigation System. Math. Probl. Eng. 2013, 2013, 782617. [Google Scholar] [CrossRef]
- Mansouri, M.; Hajji, M.; Trabelsi, M.; Harkat, M.F.; Al-khazraji, A.; Livera, A.; Nounou, H.; Nounou, M. An effective statistical fault detection technique for grid connected photovoltaic systems based on an improved generalized likelihood ratio test. Energy 2018, 159, 842–856. [Google Scholar] [CrossRef]
- Du, B.; Shi, Z.; Song, J.; Wang, H.; Han, L. A Fault-Tolerant Data Fusion Method of MEMS Redundant Gyro System Based on Weighted Distributed Kalman Filtering. Micromachines 2019, 10, 278. [Google Scholar] [CrossRef] [PubMed]
- Mansouri, M.; Nounou, M.; Nounou, H.; Karim, N. Kernel PCA-based GLRT for nonlinear fault detection of chemical processes. J. Loss Prev. Process Ind. 2016, 40, 334–347. [Google Scholar] [CrossRef]
- Harkat, M.F.; Mansouri, M.; Abodayeh, K.; Nounou, M.; Nounou, H. New sensor fault detection and isolation strategy–based interval-valued data. J. Chemom. 2020, 34, e3222. [Google Scholar] [CrossRef]
- He, K.P.; Shao, Y.P.; Zhang, L. A Study on Fault Detection Method of Redundant Inertial Navigation System on Micro AUV. Appl. Mech. Mater. 2015, 709, 473–479. [Google Scholar] [CrossRef]
- Yang, C.K.; Shim, D.S. FDI using Multiple Parity Vectors for Redundant Inertial Sensors. Eur. J. Control. 2006, 12, 437–449. [Google Scholar] [CrossRef]
- Daly, K.C.; Gai, E.; Harrison, J.V. Generalized Likelihood Test for FDI in Redundant Sensor Configurations. J. Guid. Control. Dyn. 2012, 2, 9–17. [Google Scholar] [CrossRef]
- Lyu, P.; Wang, B.; Lai, J.; Bai, S. A factor graph optimization method for high-precision IMU based navigation system. IEEE Trans. Instrum. Meas. 2023, 72, 23483881. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subsystems | Bias Instability of Gyro (°/h) | Bias Instability of Acc (m/s2) |
|---|---|---|
| INS1 | 0.01 | 1 × 10−4 g |
| INS2 | 0.01 | 1 × 10−4 g |
| AHRS | 0.1 | 5 × 10−3 g |
| Statistical Items | Fault Detection Rate (FDR) | False Alarm Rate (FAR) | Accuracy |
|---|---|---|---|
| Traditional GLT | 68.33% | 67.15% | 50.59% |
| WGLT | 66.66% | 0% | 83.33% |
| PPV-aided SWGLT | 99.27% | 0% | 99.64% |
| Statistical Items | Fault Detection Rate (FDR) | False Alarm Rate (FAR) | Accuracy |
|---|---|---|---|
| Traditional GLT | 65.40% | 59.63% | 52.89% |
| WGLT | 67.74% | 0% | 83.87% |
| PPV-aided SWGLT | 99.38% | 0% | 99.69% |
| Statistical Items | Fault Detection Rate (FDR) | False Alarm Rate (FAR) | Accuracy | Detection Delay |
|---|---|---|---|---|
| Traditional GLT | 33.0% | 78.32% | 27.34% | 33.5 s |
| WGLT | 31.4% | 0% | 65.70% | 34.3 s |
| PPV-aided SWGLT | 74.2% | 0% | 87.10% | 12.9 s |
| Statistical Items | Fault Detection Rate (FDR) | False Alarm Rate (FAR) | Accuracy | Detection Delay |
|---|---|---|---|---|
| Soft fault rate with 0.03°/h/s | ||||
| Traditional GLT | 40.2% | 76.18% | 32.01% | 29.9 s |
| WGLT | 34.6% | 0% | 67.3% | 32.7 s |
| PPV-aided SWGLT | 76.4% | 0% | 88.2% | 11.8 s |
| Soft fault rate with 0.05°/h/s | ||||
| Traditional GLT | 49.4% | 68.98% | 40.21% | 25.3 s |
| WGLT | 50.2% | 0% | 75.1% | 24.9 s |
| PPV-aided SWGLT | 83.74% | 0% | 91.48% | 8.13 s |
| Soft fault rate with 0.1°/h/s | ||||
| Traditional GLT | 85.98% | 69.22% | 58.38% | 7.01 s |
| WGLT | 85.1% | 0% | 92.55% | 7.45 s |
| PPV-aided SWGLT | 91.84% | 0% | 95.92% | 4.08 s |
| Soft fault rate with 0.2°/h/s | ||||
| Traditional GLT | 96.52% | 69.58% | 63.47% | 1.74 s |
| WGLT | 96.04% | 0% | 98.02% | 1.98 s |
| PPV-aided SWGLT | 98.48% | 0% | 99.24% | 0.48 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, Y.; Lai, J.; Zhang, Q.; Li, Z.; Shen, Y. An Improved Fault Detection and Isolation Method for Airborne Inertial Navigation System/Attitude and Heading Reference System Redundant System. Aerospace 2023, 10, 1024. https://doi.org/10.3390/aerospace10121024
Dai Y, Lai J, Zhang Q, Li Z, Shen Y. An Improved Fault Detection and Isolation Method for Airborne Inertial Navigation System/Attitude and Heading Reference System Redundant System. Aerospace. 2023; 10(12):1024. https://doi.org/10.3390/aerospace10121024
Chicago/Turabian StyleDai, Yuting, Jizhou Lai, Qieqie Zhang, Zhimin Li, and Yugui Shen. 2023. "An Improved Fault Detection and Isolation Method for Airborne Inertial Navigation System/Attitude and Heading Reference System Redundant System" Aerospace 10, no. 12: 1024. https://doi.org/10.3390/aerospace10121024
APA StyleDai, Y., Lai, J., Zhang, Q., Li, Z., & Shen, Y. (2023). An Improved Fault Detection and Isolation Method for Airborne Inertial Navigation System/Attitude and Heading Reference System Redundant System. Aerospace, 10(12), 1024. https://doi.org/10.3390/aerospace10121024