3. Numerical Analysis Results and Considerations
This study applied the finite-element method to perform a numerical analysis and developed a calculation program (using MATLAB) to investigate the stability according to changes in the position of the intermediate support in Beck’s beam on an elastic foundation. In addition, in this study, the length of the beam was obtained by dividing it into 20 finite elements, and to verify the validity of the numerical solution, the result (
p = 20.052) of reference [
10], which did not consider the intermediate support point in Beck’s beam on an elastic foundation, was used, and it can be confirmed that the result (
p = 20.054) obtained in this study has an error of 0.0001%.
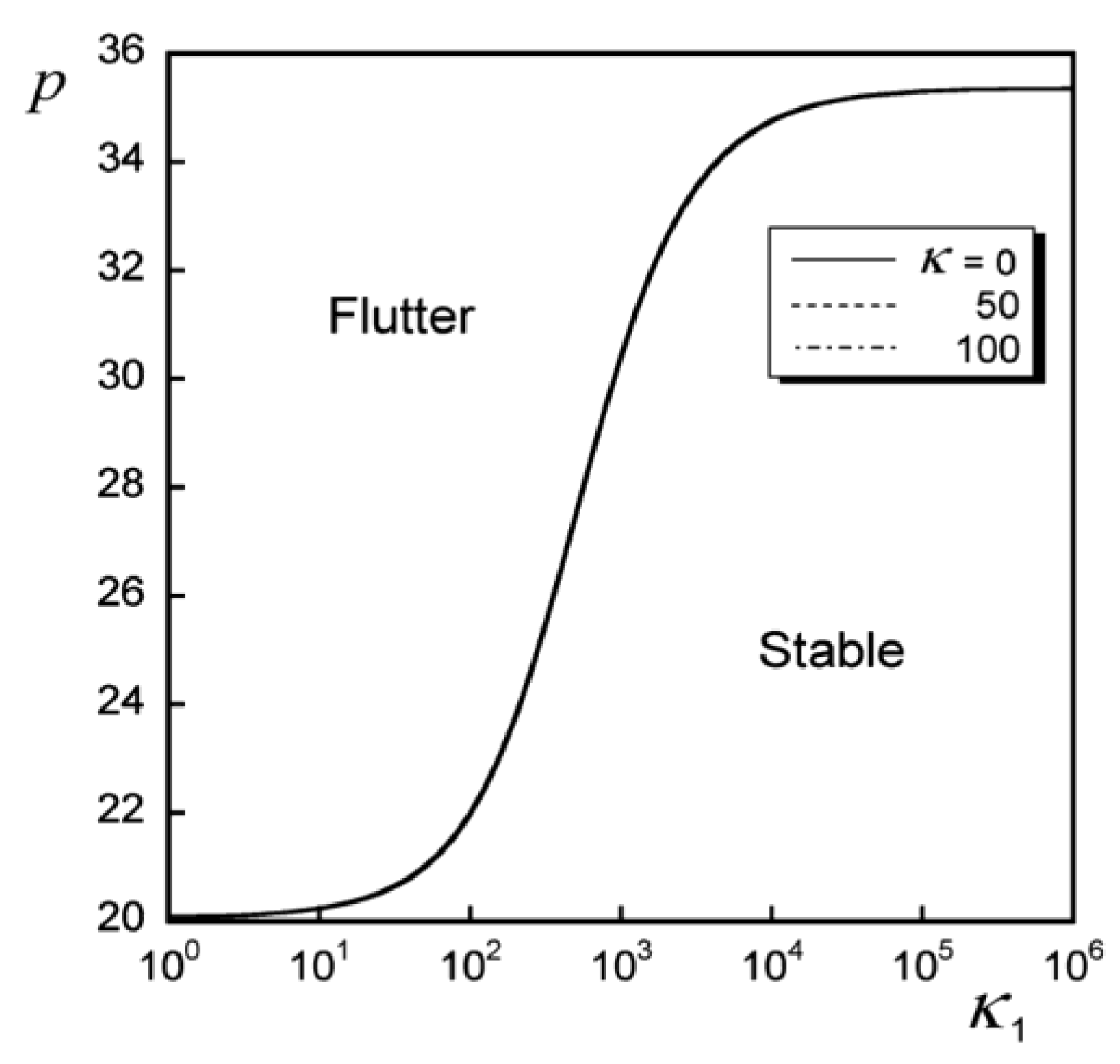
Figure 4 shows the critical follower force value according to the size of the intermediate support spring stiffness,
k1, when the elastic foundation parameter is k = 0, 50, 100 and the position of the intermediate support point is
= 0.3. What can be seen from this figure is that, regardless of the sizes of
k and
k1, only flutter-type instability occurs, and the critical value increases sharply when
k1 ranges from 10
1 to 10
6.
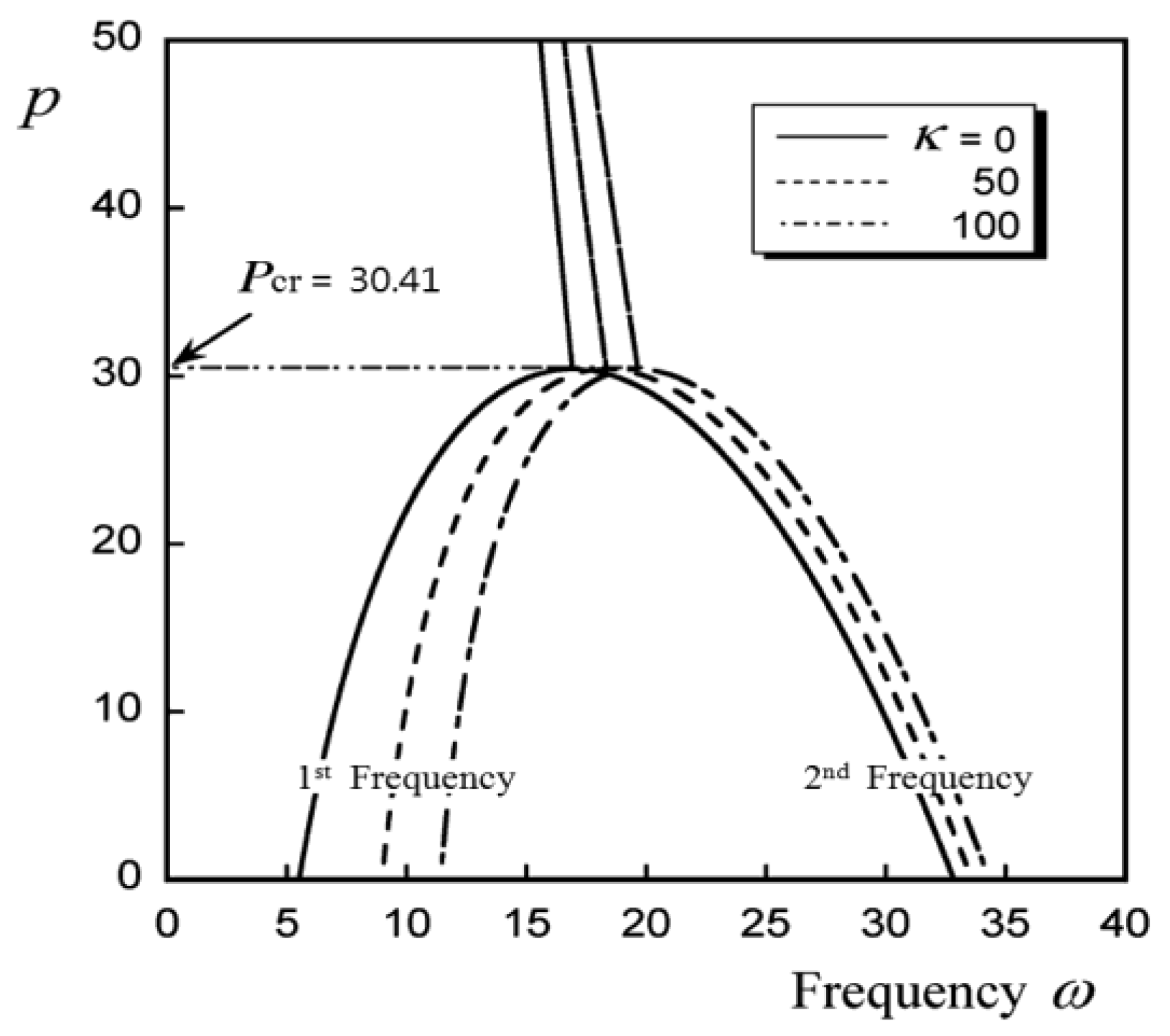
Figure 5 shows the first and second natural frequencies according to the change in the following force for the elastic foundation parameters are k = 0, 50, 100 when the intermediate support point position is
= 0.3 and the intermediate support spring stiffness is k
1 = 10
3. In this figure, flutter-type instability occurs where the first and second natural frequencies match, the critical flutter value at which flutter occurs is
, and as the value of the elastic basis parameter
k increases, the natural frequency value increases. However, it can be seen that there is no change in the critical flutter value.
Figure 6 shows the critical follower force value according to the size of the intermediate support spring stiffness, k1, when the elastic foundation parameters are
k = 0, 50, 100 and the position of the intermediate support point is
= 0.2. When
k = 0, flutter-type instability occurs in the section where
k1 ≤ 47.77, and as the value of
k1 increases, the critical follower force value increases rapidly. At
k1 = 47.77, there is a transition from flutter-type instability to divergence-type instability, and in the section of
k1 ≥ 47.77, only divergence-type instability occurs, and as the value of k1 increases, the critical follower force value decreases rapidly. In the case of
k = 50, 100, it can be seen that there is a transition from flutter-type instability to divergence-type instability at
k1 = 55.29 and 64.88, respectively.
In
Figure 7, in order to explain in more detail the process of transition from flutter-type instability to divergence-type instability, the position of the intermediate support point was calculated according to the change in the value of the following force when
= 0.510, 0.515, 0.520, 0.525. It shows changes in the first and second natural frequency values. In the case of
= 0.510, flutter-type instability, where the first and second natural frequencies match, occurs at
pcr = 36.48, and in the case of
= 0.515, flutter-type instability occurs at
pcr = 41.67. The section where the first and second natural frequencies matched became shorter than when
= 0.510, and the critical value at which flutter occurred increased. Divergence-type instability occurs at
pcr = 37.01, where the first natural frequency of
= 0.520 becomes 0, indicating that there has been a transition from flutter-type instability to divergence-type instability. In the case of
= 0.525, divergence-type instability occurs at
pcr = 32.91, where the first natural frequency becomes 0, and the critical value at which divergence occurs is reduced compared to the case of
= 0.520.
Figure 8 shows the instability type and critical follower force value according to the change in the position of the intermediate support point when the elastic foundation parameters are
k = 0, 50, 100 and
= 0.001 and the intermediate support spring stiffness,
k1 = 10
6. In this figure, flutter-type instability occurs in the section where the position of the middle support point is
≤ 0.498, and the critical follower force value increases rapidly at
= 0.499, resulting in a transition from flutter-type instability to divergence-type instability. In the range of
≥ 0.498, divergence-type instability occurs. Also, what can be seen from this figure is that, in the flutter section, there is a constant critical follower force value regardless of the value of the elastic basis parameter, and as the elastic support moves from the fixed end to the center (0 → 0.498), the critical follower force value increases. And in the divergence section, as the value of the elastic foundation parameter, k, increases, the critical follower force value increases, and as the elastic support moves from the center to the free-end direction (0.499 → 1), the critical follower force value decreases.
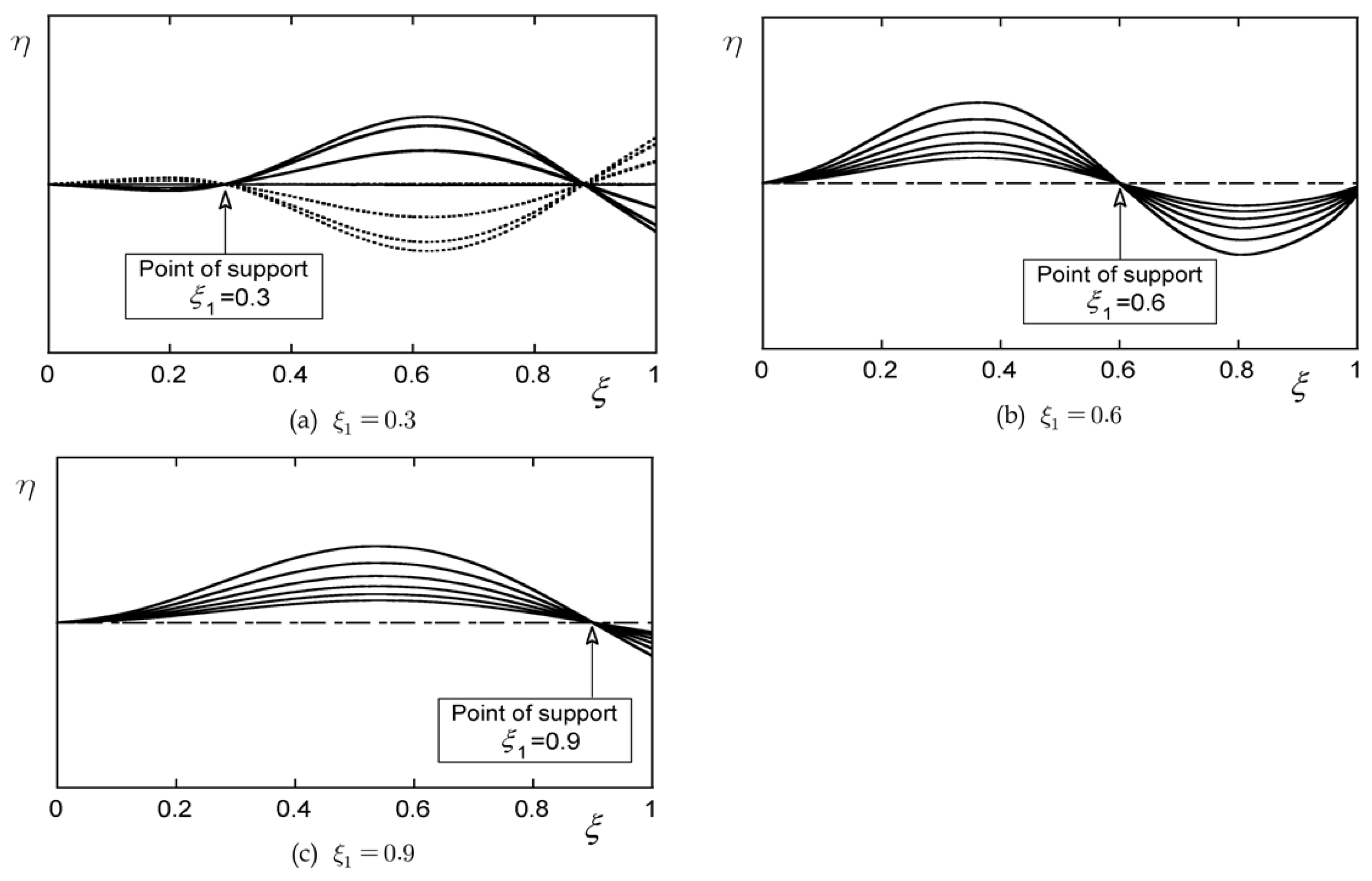
Figure 9 shows the instability mode shapes in each instability region (
= 0.3, 0.6, 0.9).
Figure 9a shows the instability mode shape when there is an intermediate support at the position of
= 0.3. In this picture, it has a flutter-type unstable mode shape and is a third mode with two nodes.
Figure 9b shows the unstable mode shape when there is an intermediate support at the position of
= 0.6, and it has a divergence-type unstable mode shape with upper and lower amplitudes based on the point of
= 0.6.
When there is an intermediate support at the position of
= 0.9, as shown in
Figure 9c, it has a divergence-type instability mode shape with upper and lower amplitudes based on the point of
= 0.9. Therefore, in
Figure 9, it can be seen that the unstable mode shape and the order of the mode are different depending on the location of the intermediate support point.
Through the above analysis results, it was found that structural instability transitions near the center of the beam. Although there is no change in the critical value (pcr) according to the number of finite-element divisions, the calculation was performed by dividing the finite elements into 40 to perform a detailed analysis of changes according to the intermediate support position (ξ1). The change in the critical value of the follower force in the section where structural instability transitions was confirmed, and the number of finite-element divisions was increased to obtain detailed analysis values.
Figure 10a shows the results of the analysis performed using the range ξ
1 = 0.4~0.6 (pos) and the values of
k1 = 10
6 (ssp) and
k = 0 (fsp). It was confirmed that the intermediate support’s vibration divergence occurred as
k1 moved from 0.4 to 0.6.
Figure 10b shows the results of the analysis performed using the range ξ
1 = 0.4~0.6 (pos) and the values of
k1 = 10
6 (ssp) and
k = 150 (fsp). It was confirmed that the intermediate support’s vibration divergence occurred as
k1 moved from 0.4 to 0.6. As shown in
Figure 10a,b, the flutter critical value is the same as
k changes, but when vibration diverges, the critical value increases further. Here, pos(x): represents the position ratio from the fixed end, ssp(x): represents the dimensionless parameter of the elastic support end, and fsp(x): represents the dimensionless parameter of the elastic support member.
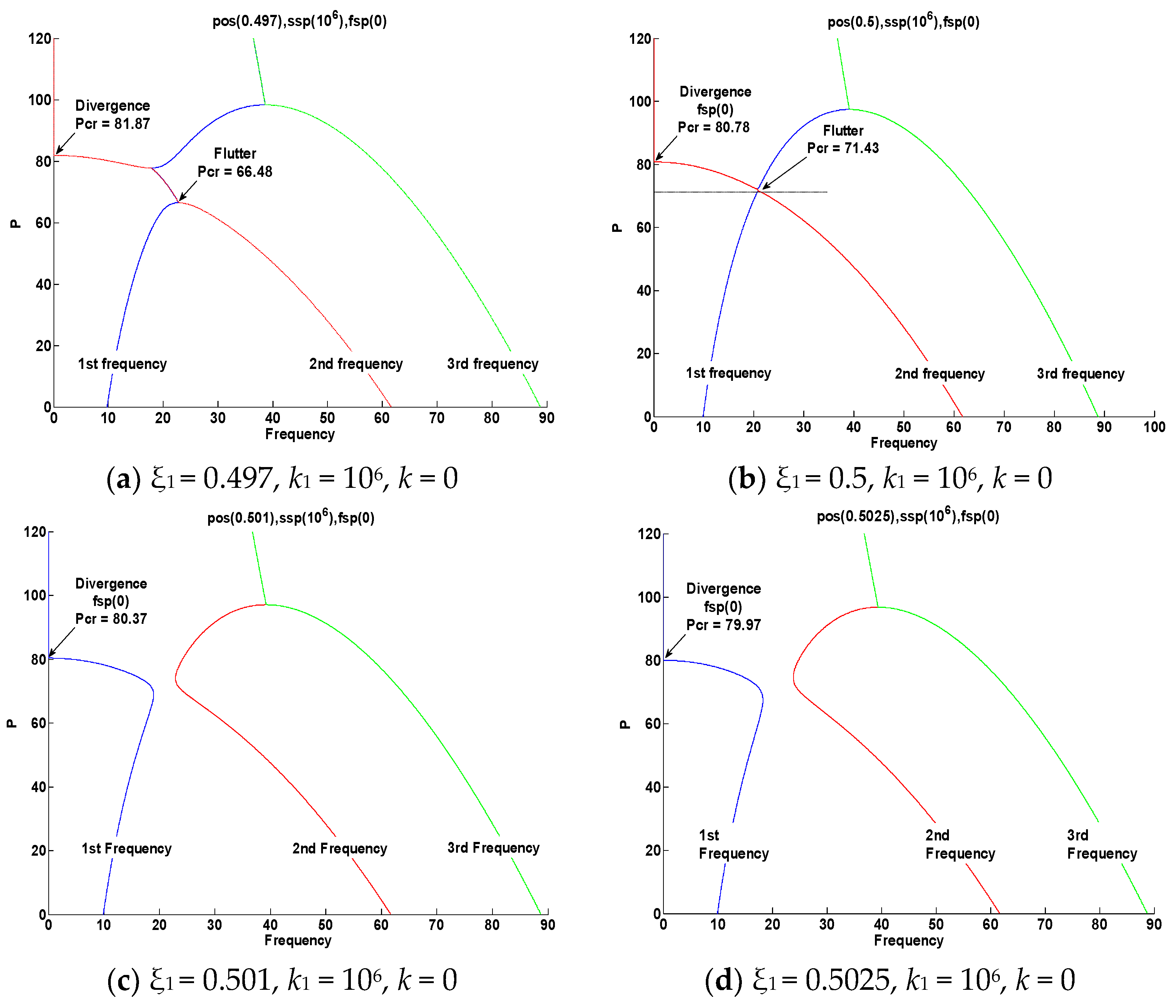
Figure 11 shows the process in which the intermediate elastic support transitions (flutter → divergence) according to the change in position (ξ
1). The critical value (p
cr) is in the form of flutter when the position of the intermediate support (
k1) increases from 0.497 → 0.525. It was confirmed that the critical value (p
cr) in the form of divergence decreased after the transition while rising.
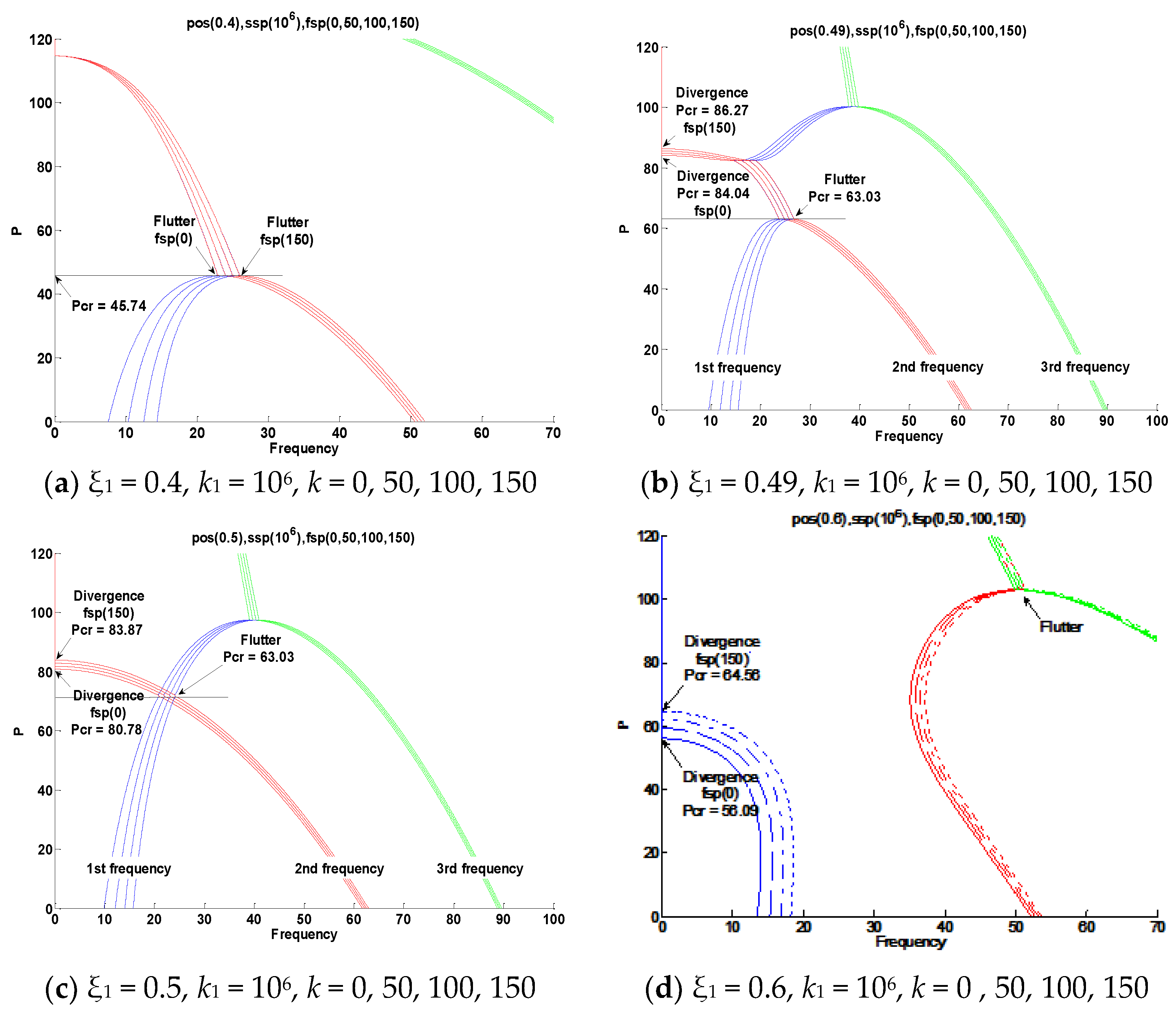
Figure 12 shows the change in location of the concentrated elastic support (ξ
1) and the increase in the elasticity value (
k) of the distributed elastic support. The instability characteristics (flutter → divergence) changed according to the position change (ξ
1), the critical value (p
cr) was the same according to the change in value in the case of flutter-type instability, and the value changed in the case of divergence-type instability. Accordingly, the critical value (p
cr) increased. At this time, as the
k value increased, each natural frequency increased. In the process of transition (flutter → divergence),
Figure 12a shows instability in the form of flutter where the first and second natural frequencies meet. However, as the position change (ξ
1) increases, as shown in
Figure 12b,c, instability in the form of flutter is followed by instability in the form of divergence due to secondary natural vibrations. Additionally, in
Figure 12d, it was confirmed that instability in the form of divergence appears by the first natural frequency.
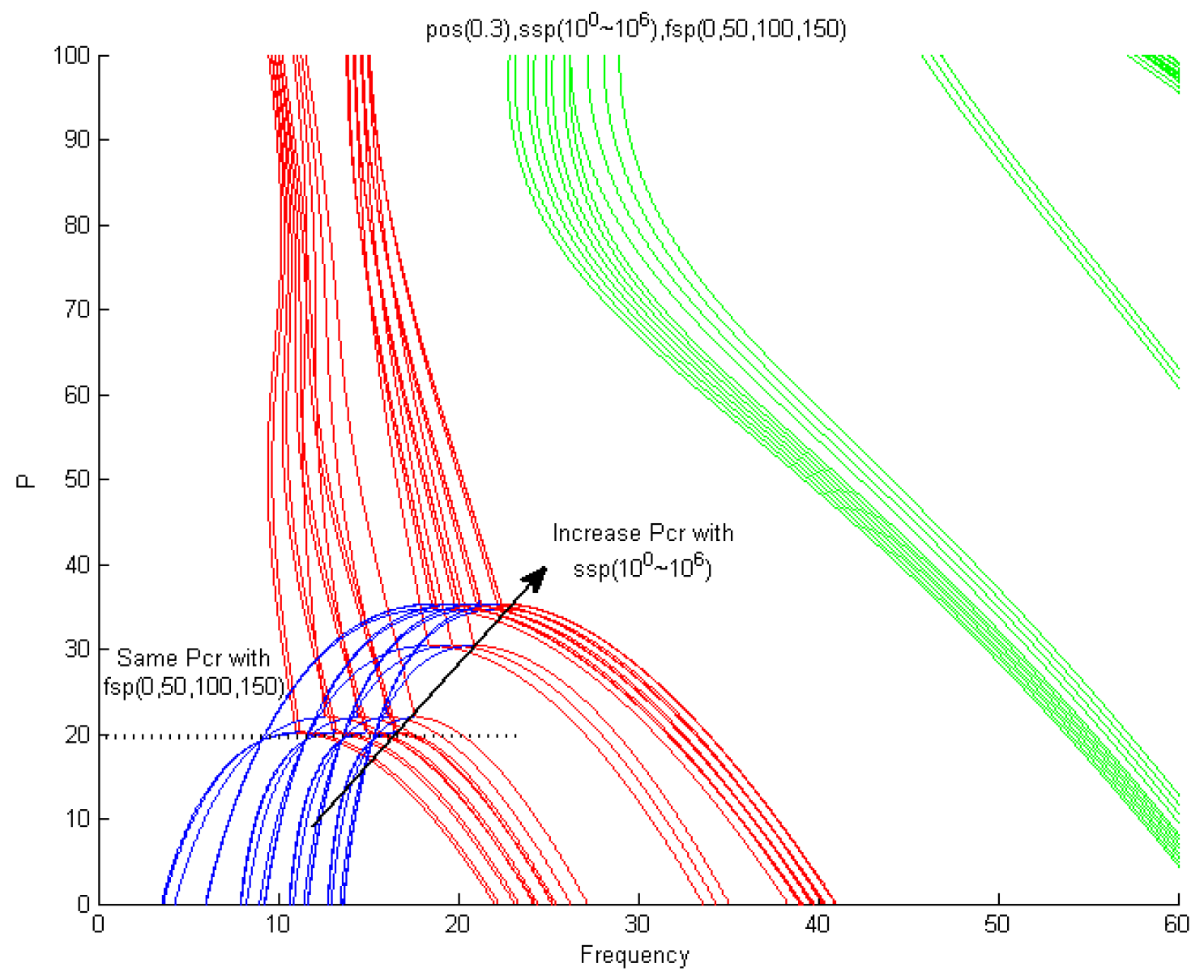
Figure 13 shows an analysis performed according to the increase in elasticity values of
k1 and
k in the section ξ
1 = 0.3 (pos). For
k1, the values
k1 = 10
0, 10
1, 10
2, 10
3, 10
4, 10
5, 10
6 (ssp) were applied step by step, and
k was the result of the analysis by applying the values
k = 0, 50, 100, and 150 (fsp). It was confirmed that as the elastic modulus of
k1 increased in the intermediate support section, the critical follower force value (p
cr) and the natural frequency increased. In addition, it was confirmed that as the elastic modulus of
k increases, the critical follower force value (p
cr) remains unchanged and only the natural frequency increases.
Through this conclusion, as shown in
Figure 12, it was confirmed that the natural frequency of the beam structure placed on an elastic foundation increases only as the elastic modulus (
k) increases, and the critical value (p
cr) when unstable in the form of flutter is the same. It was confirmed that the critical value (p
cr) increases when instability occurs in the form of divergence.
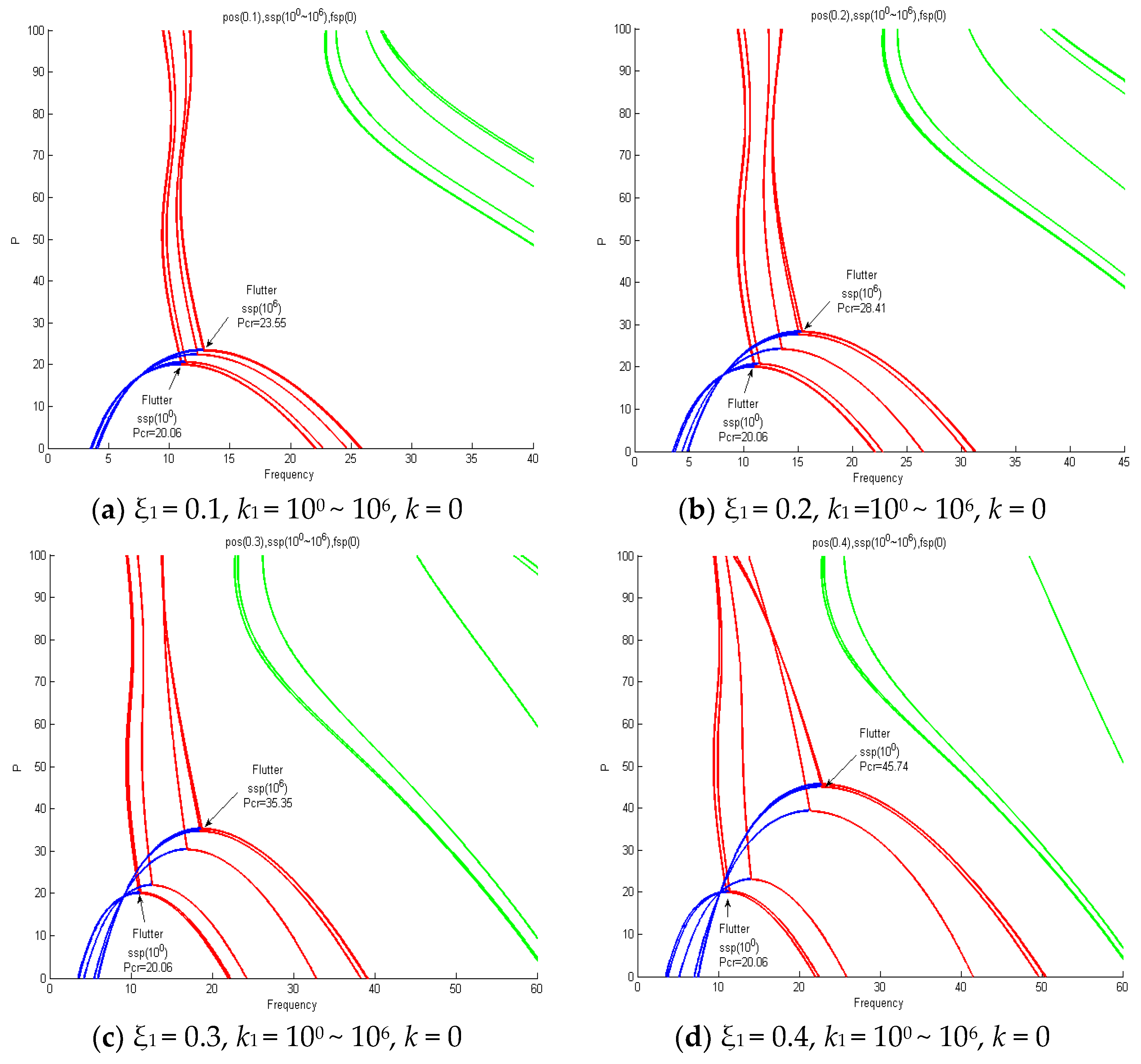
Figure 14 shows the change in critical value according to the change in the intermediate elastic support position (ξ
1) and the elastic support value (
k1). In the section where the ξ
1 value increases from 0.1 → 0.4 (pos), instability in the form of flutter was shown. In addition, it was confirmed that when the intermediate elastic support value increased to
k1 = 10
0, 10
1, 10
2, 10
3, 10
4, 10
5, 10
6, the critical value (p
cr) and the natural frequency increased due to instability in the form of flutter. At this time, it was confirmed that the critical value (p
cr) increased rapidly at
k1 = 10
2, 10
3, 10
4 and that there was no change in the critical value depending on the value of
k. When
k1 = 10
0, the critical value according to the change in the intermediate elastic support position (ξ
1) was the same as p
cr = 20.06.
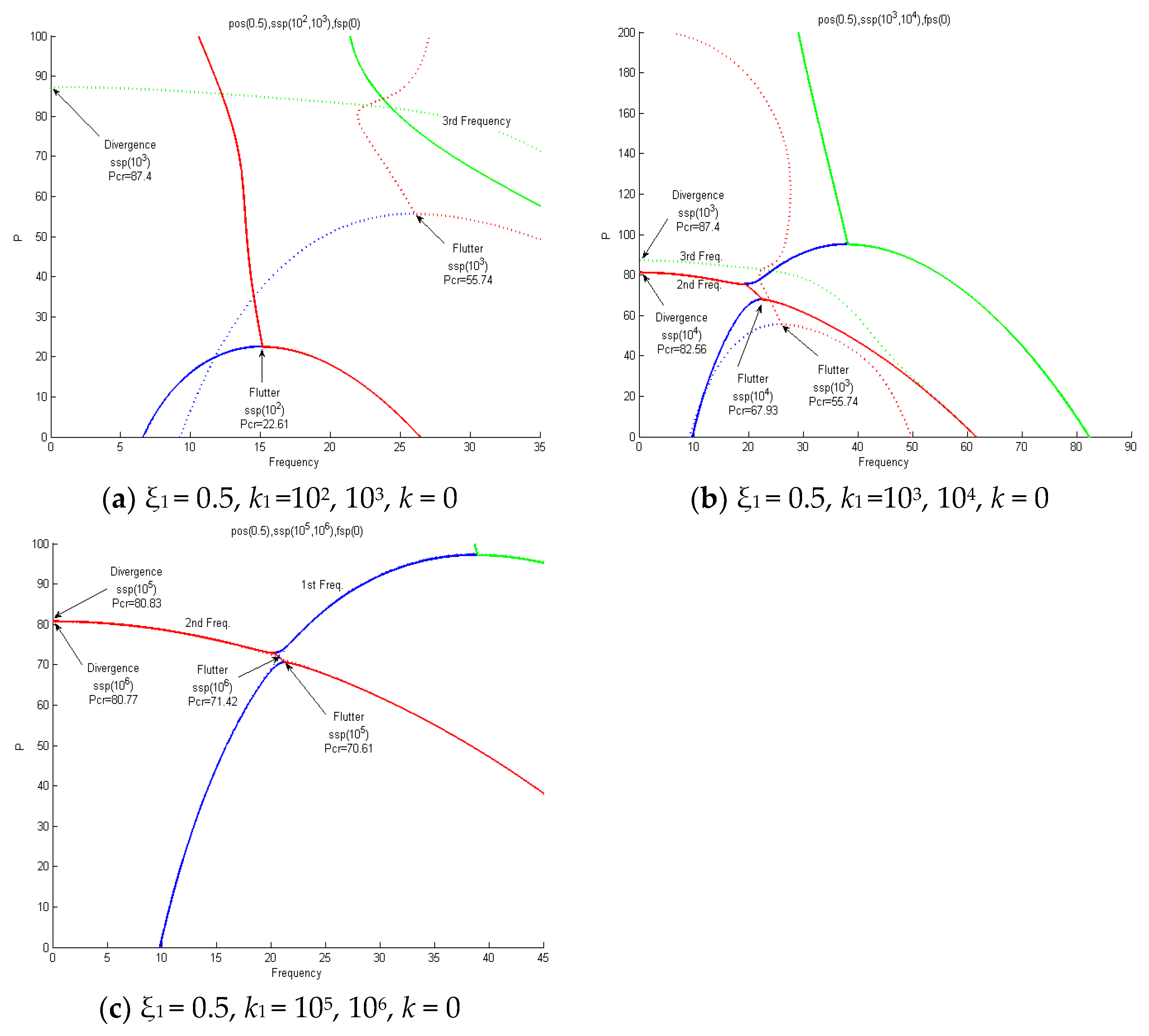
Figure 15 shows an analysis performed according to the elasticity value increase
k1 = 10
2, 10
3, 10
4, 10
5, 10
6 (ssp) in the ξ
1 = 0.5 (pos) section.
Figure 15a applies the values of
k1 = 10
2 and 10
3, and when
k1 = 10
2 increases from
k1 = 10
3, the critical value increases from p
cr = 22.31 to p
cr = 55.74 due to instability in the form of flutter. When
k1 = 10
3, the first and second natural vibrations met and flutter instability occurred. Then, at p
cr = 87.4, instability in the form of divergence appeared due to the third natural vibration.
Figure 15b applies the values of
k1 = 10
3 and 10
4, and when increasing from
k1 = 10
3 to
k1 = 10
4, the critical value increased from p
cr = 55.74 to p
cr = 67.93 due to instability in the form of flutter. When
k1 = 10
4, the first and second natural vibrations met and flutter instability occurred. Then, at p
cr = 82.56, instability in the form of divergence appeared due to the second natural vibration. In
Figure 15b,
k1 = 10
3 diverged by the third natural vibration, and
k1 = 10
4 diverged by the second natural vibration. It was confirmed that when increasing from
k1 = 10
3 to
k1 = 10
4, the flutter critical value increased, but the divergence critical value after flutter decreased from p
cr = 87.4 to p
cr = 82.56.
Figure 15c applies the values of
k1 = 10
5 and 10
6, and when increasing from
k1 = 10
5 to
k1 = 10
6, the critical value increased from p
cr = 70.61 to p
cr = 71.42 due to instability in the form of flutter. When
k1 = 10
5, 10
6, the first and second natural vibrations met and flutter instability occurred, and then instability in the form of divergence appeared due to the secondary natural vibrations at p
cr = 80.83 and p
cr = 80.77.
Figure 16 shows an analysis performed according to the increase in the elasticity value of
k1 (ssp) (
k1 = 10
0, 10
2, 10
3, 10
4) in the ξ
1 = 0.55, ξ
1 = 0.6, ξ
1 = 0.7, ξ
1 = 0.9 (pos) section.
Figure 16a shows flutter-type instability at ξ
1 = 0.55 and
k1 = 10
2, with a critical value of p
cr = 21.17. At ξ
1 = 0.55,
k1 = 10
3, the first and second natural vibrations did not meet, but at p
cr = 49.83, the second and third natural vibrations met, showing instability in the form of flutter. Additionally, the first natural vibration showed divergence at p
cr = 71.34.
Figure 16b shows flutter-type instability at ξ
1 = 0.6 and
k1 = 10
2, with a critical value of p
cr = 19.06. Unlike the flutter-type critical value at ξ
1 = 0.55,
k1 = 10
2 and the flutter-type critical value at ξ
1 = 0.6,
k1 = 10
2, which increased with
k1, the concentrated elastic support position (ξ
1) showed that the critical value decreased even as
k1 increased after ξ
1 = 0.55. At ξ
1 = 0.6 and
k1 = 10
3, instability in the form of divergence first appeared at p
cr = 58.62.
Figure 16c shows the same characteristics as
Figure 16b, but the overall critical value has decreased.
Figure 16d shows that the critical value of the flutter type decreased after ξ
1 = 0.55 at
k1 = 10
2, and then the first natural vibration showed instability in the form of divergence at p
cr = 28.76 at ξ
1 = 0.9.
4. Conclusions
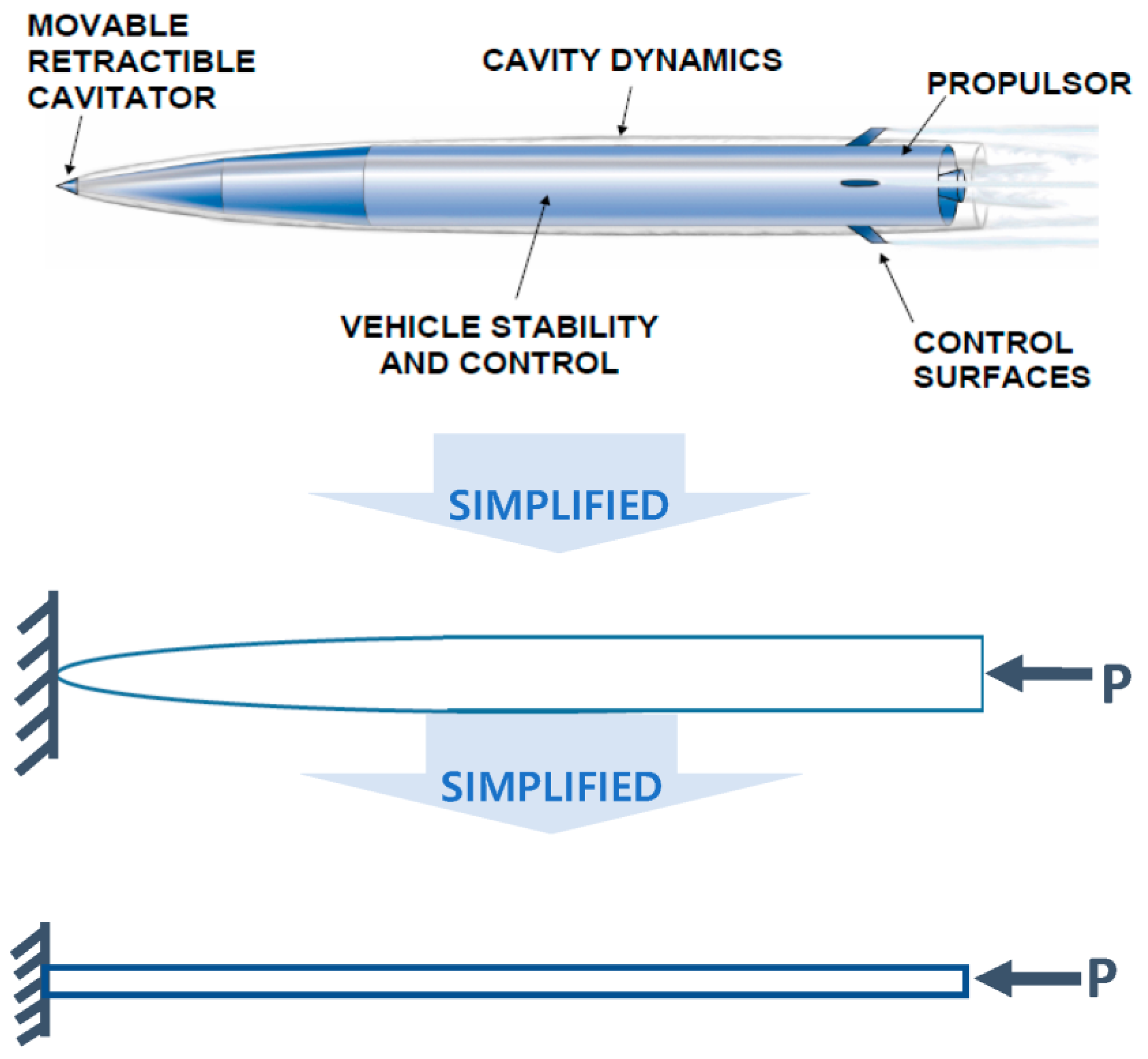
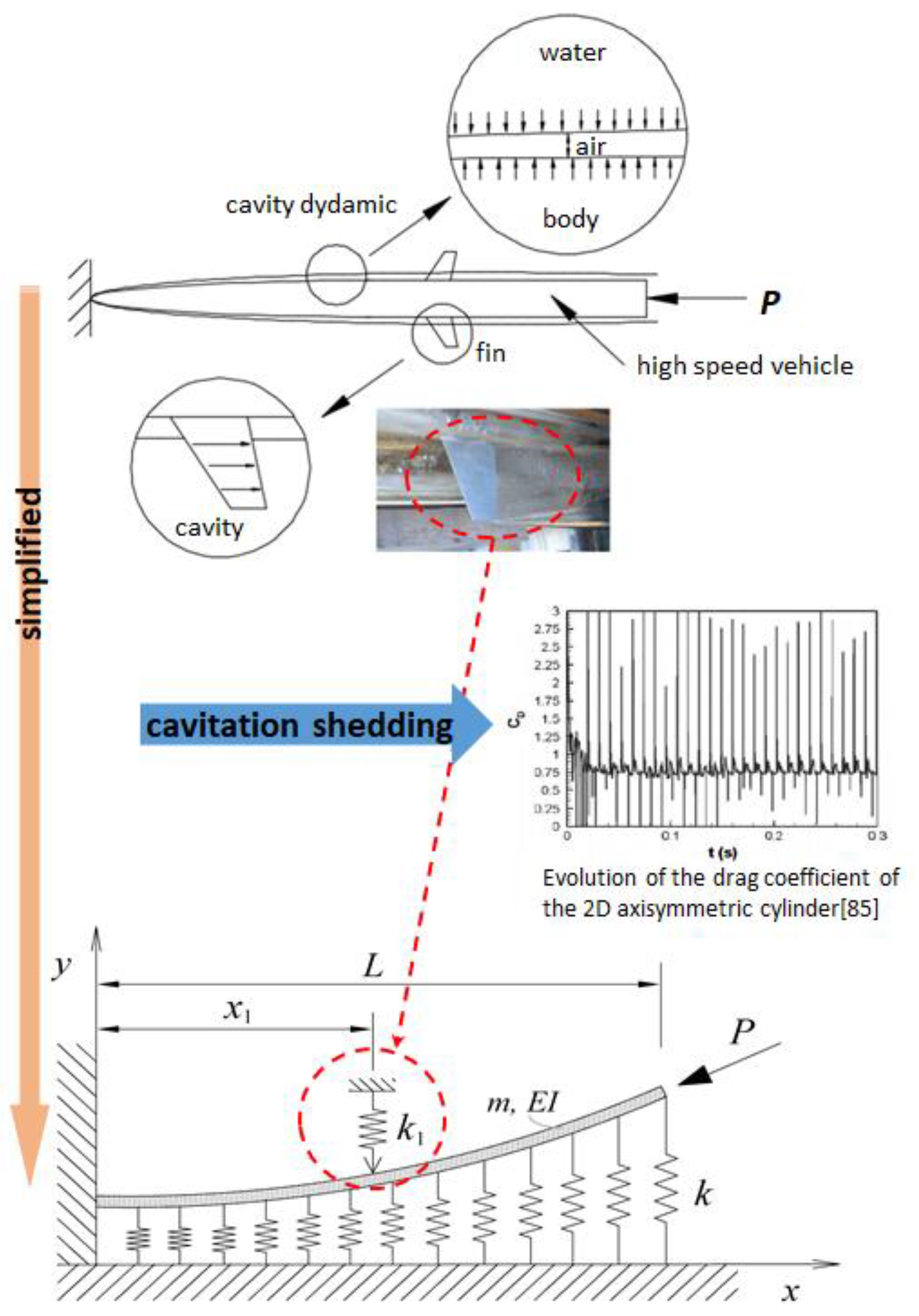
In this study, in order to analyze the structural instability characteristics of underwater high-speed vehicles, an underwater high-speed vehicle receiving propulsion at high speed was simplified into a cantilever-type model receiving driven force. In addition, the effect of the lumped mass that appears in the actual model was simplified to an intermediate support effect, and the effect of the change in the location of the lumped mass and the size of the lumped mass on structural stability was numerically analyzed. As a result of the numerical analysis, the parameters that affect the flutter-type instability, which is the dynamic instability of underwater high-speed moving objects, are the size and location of the concentrated mass, that is, the dimensionless elastic modulus (κ1) and the location (ξ1) of the intermediate support and the internal damping (γ). There are three parameters. On the other hand, there are four parameters that affect divergence-type instability, which is static instability: κ1, ξ1, γ, and the dimensionless coefficient (κ) of the elastic support.
In this study, we focused on the effect of three parameters, namely, κ1, ξ1, and κ, excluding γ, on the instability of underwater high-speed vehicles and obtained the following results.
First, as shown in
Figure 6, as the size of the concentrated mass, that is, κ
1, increases, the instability characteristic transitions from flutter-type instability to divergence-type instability. Additionally, in the region of κ
1 that is smaller than κ
1 (κ
cr), where the transition occurs, p
cr is constant, regardless of κ, whereas in the region where κ
1 > κ
cr, p
cr changes depending on κ.
Second, as shown in
Figure 8, when the internal damping of the beam is negligibly small, a transition from flutter-type instability to divergence-type instability occurs at ξ
1 = 0.499. Additionally, in the section where flutter-type instability occurs, p
cr is constant, regardless of κ, while in the section where divergence instability occurs, p
cr also increases as κ increases.
The main results obtained above are summarized as follows. The instability of a cantilever placed on an elastic foundation subjected to a follower force is divided into flutter-type instability and divergence-type instability areas depending on the elastic modulus and the location of the intermediate support. It can be seen that flutter-type instability appears toward the fixed end and that divergence-type instability appears toward the free end, around the center (L/2) of the beam. In addition, it is relatively stable as you move toward the center (L/2) of the beam, flutter-type instability is likely to appear as you move from the center (L/2) of the beam toward the fixed end, and divergence-type instability is likely to appear as you move toward the free end.
Therefore, when a large following force is applied to an actual underwater high-speed vehicle, instability appears as the center of gravity moves from the center to both ends, so this should be taken into consideration when designing, and it can be used as a guideline for controlling instability when designing a structure subject to a following force. If a mechanism that can generate a supercavity at a specific location is introduced, the entire moving body can be formed into a supercavity even with relatively small thrust. And in the case of beams with concentrated mass at the ends, the critical value is relatively high, so stability can be secured by the following force. Therefore, when a large following force is applied to an actual underwater high-speed vehicle, instability appears as the center of gravity moves from the center to both ends; so, unlike missiles that have the same aerodynamic characteristics, the position of the control pin is considered from the center toward the bow. Thus, it was clear that the design was necessary. It can also be used as a control guideline for instability when designing structures subject to driving force.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}