A Review on IEEE 802.11p for Intelligent Transportation Systems




Abstract
1. Introduction
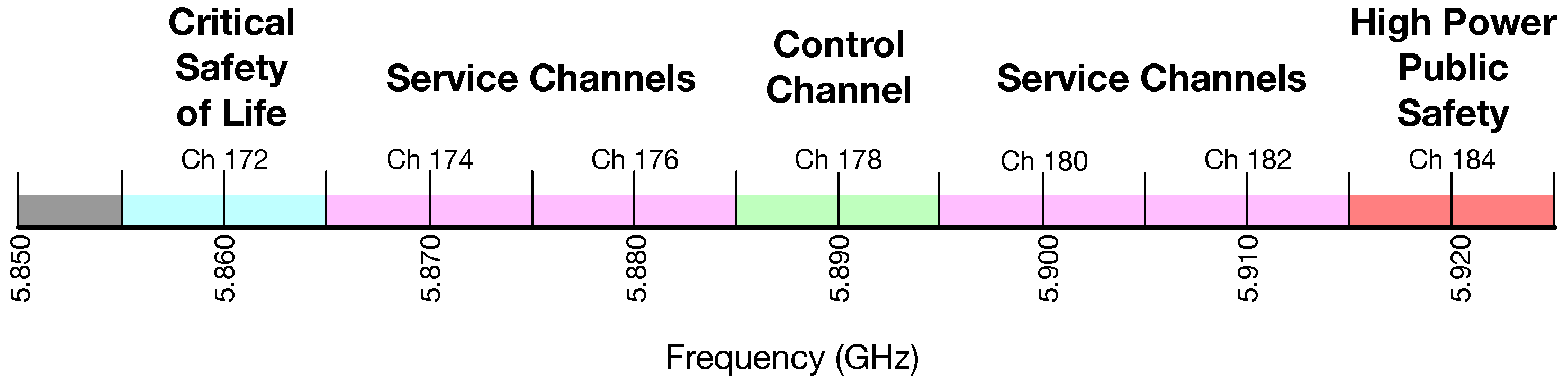
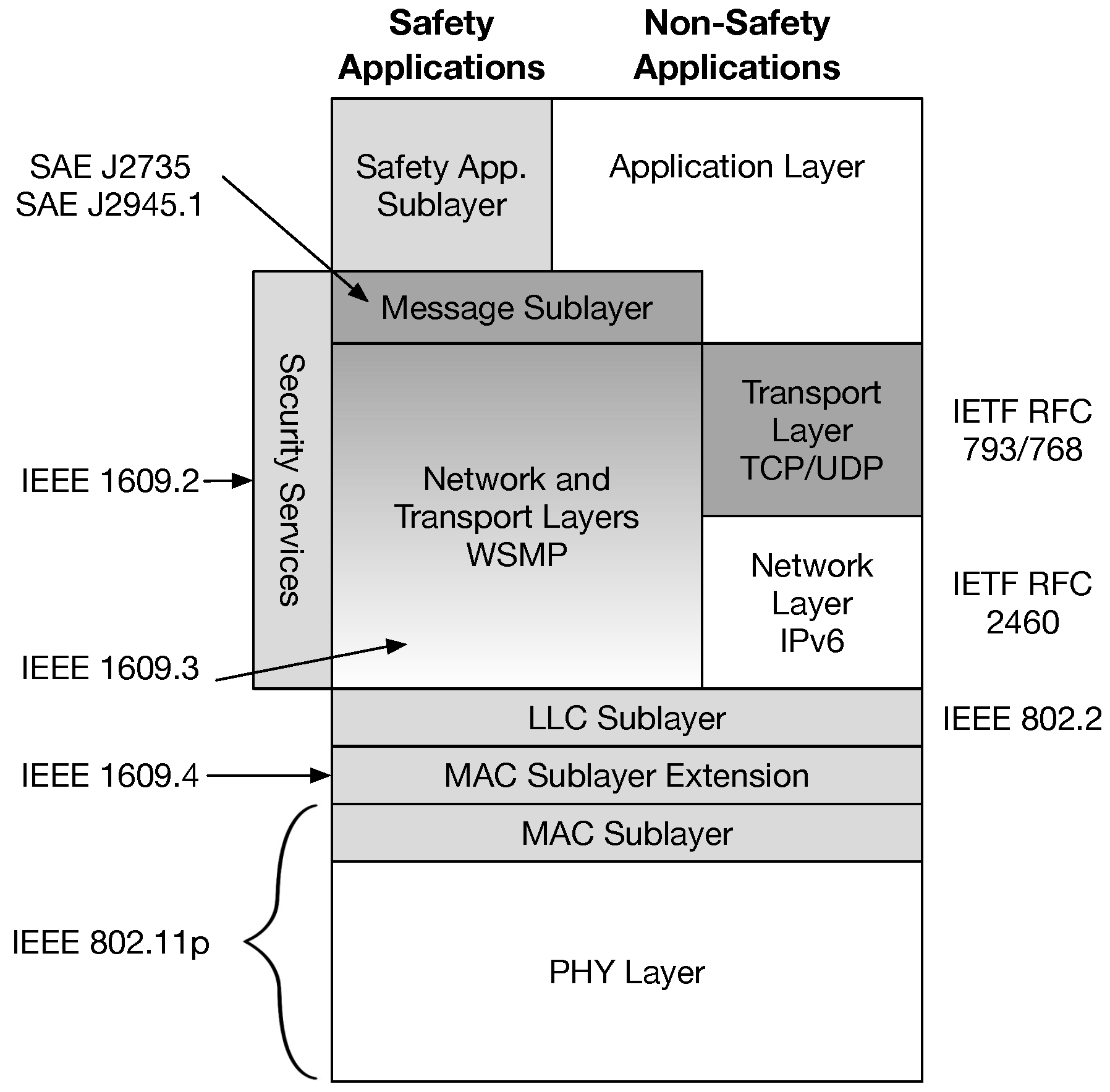
2. Preliminary Notes on Dsrc
- Describe the functions and services required by the WAVE systems;
- Define the interfaces that allow communication with higher layers.
3. Mac Layer
4. Phy Layer
5. Comparison between IEEE 802.11p and Lte-V2x
6. IEEE 802.11bd as an Evolution of the IEEE 802.11p
7. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Toppan, A.; Bazzi, A.; Toppan, P.; Masini, B.; Andrisano, O. Architecture of a simulation platform for the smart navigation service investigation. In Proceedings of the 2010 IEEE 6th International Conference on Wireless and Mobile Computing, Networking and Communications, Niagara Falls, ON, Canada, 11–13 October 2010; pp. 548–554. [Google Scholar] [CrossRef]
- Pau, G.; Severino, A.; Canale, A. Special issue “new perspectives in intelligent transportation systems and mobile communications towards a smart cities context”. Future Internet 2019, 11, 228. [Google Scholar] [CrossRef]
- Uchida, N.; Takeuchi, S.; Ishida, T.; Shibata, Y. Mobile traffic accident prevention system based on chronological changes of wireless signals and sensors. J. Wirel. Mob. Netw. Ubiquitous Comput. Dependable Appl. 2017, 8, 57–66. [Google Scholar] [CrossRef]
- Bazzi, A.; Zanella, A.; Masini, B. An OFDMA-Based MAC Protocol for Next-Generation VANETs. IEEE Trans. Veh. Technol. 2015, 64, 4088–4100. [Google Scholar] [CrossRef]
- Nkenyereye, L.; Tama, B.; Park, Y.; Rhee, K. A fine-grained privacy preserving protocol over attribute based access control for VANETs. J. Wirel. Mob. Netw. Ubiquitous Comput. Dependable Appl. 2015, 6, 98–112. [Google Scholar]
- Eziama, E.; Tepe, K.; Balador, A.; Nwizege, K.; Jaimes, L. Malicious Node Detection in Vehicular Ad-Hoc Network Using Machine Learning and Deep Learning. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, UAE, 9–13 December 2018. [Google Scholar] [CrossRef]
- Medeiros, D.; Hernandez, D.; Campista, M.; de Castro, P.; Pedroza, A. Impact of relative speed on node vicinity dynamics in VANETs. Wirel. Netw. 2019, 25, 1895–1912. [Google Scholar] [CrossRef]
- Balador, A.; Uhlemann, E.; Calafate, C.; Cano, J.C. Supporting beacon and event-driven messages in vehicular platoons through token-based strategies. Sensors 2018, 18, 955. [Google Scholar] [CrossRef]
- Larue, G.; Watling, C.; Black, A.; Wood, J.; Khakzar, M. Pedestrians distracted by their smartphone: Are in-ground flashing lights catching their attention? A laboratory study. Accid. Anal. Prev. 2020, 134. [Google Scholar] [CrossRef]
- Neto, V.; Medeiros, D.; Campista, M. Analysis of mobile user behavior in vehicular social networks. In Proceedings of the 2016 7th International Conference on the Network of the Future (NOF), Buzios, Brazil, 16–18 November 2017. [Google Scholar] [CrossRef]
- Pau, G.; Campisi, T.; Canale, A.; Severino, A.; Collotta, M.; Tesoriere, G. Smart pedestrian crossing management at traffic light junctions through a fuzzy-based approach. Future Internet 2018, 10, 15. [Google Scholar] [CrossRef]
- Tesoriere, G.; Campisi, T.; Canale, A.; Severino, A. The effects of urban traffic noise on children at kindergarten and primary school: A case study in Enna. AIP Conf. Proc. 2018, 2040, 140005. [Google Scholar] [CrossRef]
- Ticali, D.; Denaro, M.; Barracco, A.; Guerrieri, M. Piezoelectric energy harvesting from raised crosswalk devices. AIP Conf. Proc. 2015, 1648, 780006. [Google Scholar] [CrossRef]
- Tesoriere, G.; Canale, A.; Severino, A.; Mrak, I.; Campisi, T. The management of pedestrian emergency through dynamic assignment: Some consideration about the “refugee Hellenism” Square of Kalamaria (Greece). AIP Conf. Proc. 2019, 2186, 160004. [Google Scholar] [CrossRef]
- Song, F.; Zhu, M.; Zhou, Y.; You, I.; Zhang, H. Smart Collaborative Tracking for Ubiquitous Power IoT in Edge-Cloud Interplay Domain. IEEE Internet Things J. 2019. [Google Scholar] [CrossRef]
- Arena, F.; Pau, G. An overview of vehicular communications. Future Internet 2019, 11, 27. [Google Scholar] [CrossRef]
- Pei, Q.; Kang, B.; Zhang, L.; Choo, K.R.; Zhang, Y.; Sun, Y. Secure and privacy-preserving 3D vehicle positioning schemes for vehicular ad hoc network. EURASIP J. Wirel. Comm. Netw. 2018, 2018, 271. [Google Scholar] [CrossRef]
- Zhang, L.; Luo, M.; Li, J.; Au, M.H.; Choo, K.R.; Chen, T.; Tian, S. Blockchain based secure data sharing system for Internet of vehicles: A position paper. Veh. Commun. 2019, 16, 85–93. [Google Scholar] [CrossRef]
- Tesoriere, G.; Campisi, T.; Canale, A.; Severino, A.; Arena, F. Modelling and simulation of passenger flow distribution at terminal of Catania airport. AIP Conf. Proc. 2018, 2040, 140006. [Google Scholar] [CrossRef]
- Ticali, D.; Acampa, G.; Denaro, M. Renewable energy efficiency by railway transit. Case study on Rebaudengo railway tunnel in Turin. AIP Conf. Proc. 2018, 2040, 140009. [Google Scholar] [CrossRef]
- Arena, F.; Ticali, D. The development of autonomous driving vehicles in tomorrow’s smart cities mobility. AIP Conf. Proc. 2018, 2040, 140007. [Google Scholar] [CrossRef]
- Giliberto, M.; Arena, F.; Pau, G. A fuzzy-based solution for optimized management of energy consumption in e-bikes. J. Wirel. Mob. Netw. Ubiquitous Comput. Dependable Appl. 2019, 10, 45–64. [Google Scholar] [CrossRef]
- Masini, B.; Zuliani, L.; Andrisano, O. On the effectiveness of a GPRS based intelligent transportation system in a realistic scenario. In Proceedings of the 2006 IEEE 63rd Vehicular Technology Conference, Melbourne, Australia, 7–10 May 2006; Volume 6, pp. 2997–3001. [Google Scholar]
- Riouali, Y.; Benhlima, L.; Bah, S. Extended Batches Petri Nets Based System for Road Traffic Management in WSNs. J. Sens. Actuator Netw. 2017, 6, 30. [Google Scholar] [CrossRef]
- Arena, F.; Pau, G.; Collotta, M. A survey on driverless vehicles: From their diffusion to security features. J. Internet Serv. Inf. Secur. 2018, 8, 1–19. [Google Scholar] [CrossRef]
- Ai, Z.; Liu, Y.; Chang, L.; Lin, F.; Song, F. A Smart Collaborative Authentication Framework for Multi-dimensional Fine-grained Control. IEEE Access 2020, 8, 8101–8113. [Google Scholar] [CrossRef]
- Song, F.; Ai, Z.; Zhou, Y.; You, I.; Choo, R.; Zhang, H. Smart Collaborative Automation for Receive Buffer Control in Multipath Industrial Networks. IEEE Trans. Ind. Inform. 2020, 16, 1385–1394. [Google Scholar] [CrossRef]
- Song, F.; Zhou, Y.; Wang, Y.; Zhao, T.; You, I.; Zhang, H. Smart Collaborative Distribution for Privacy Enhancement in Moving Target Defense. Inf. Sci. 2019, 479, 593–606. [Google Scholar] [CrossRef]
- Song, F.; Zhou, Y.; Chang, L.; Zhang, H. Modeling Space-Terrestrial Integrated Networks with Smart Collaborative Theory. IEEE Netw. 2019, 33, 51–57. [Google Scholar] [CrossRef]
- Ai, Z.; Liu, Y.; Song, F.; Zhang, H. A Smart Collaborative Charging Algorithm for Mobile Power Distribution in 5G Networks. IEEE Access 2018, 6, 28668–28679. [Google Scholar] [CrossRef]
- Hua, J.; Zhang, R.; Liu, D.; Wang, Y.; Qian, C. Spatial Inequality Analysis of Urban Road Network based on Internet Traffic Data. In Proceedings of the 2018 3rd IEEE International Conference on Intelligent Transportation Engineering (ICITE), Singapore, 3–5 September 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, S.; Yuan, J.; Li, X.; Qian, Z.; Arena, F.; You, I. Active Data Replica Recovery for Quality-Assurance Big Data Analysis in IC-IoT. IEEE Access 2019, 7, 106997–107005. [Google Scholar] [CrossRef]
- Wang, H.; Wang, L.; Zhou, Z.; Tao, X.; Pau, G.; Arena, F. Blockchain-Based Resource Allocation Model in Fog Computing. Appl. Sci. 2019, 9, 5538. [Google Scholar] [CrossRef]
- Balouchestani-Asli, M. Robust Wireless Local Area Networks Based on Compressed Sensing. J. Sens. Actuator Netw. 2018, 7, 15. [Google Scholar] [CrossRef]
- Ai, Z.; Zhou, Y.; Song, F. A Smart Collaborative Routing Protocol for Reliable Data Diffusion in IoT Scenarios. Sensors 2018, 18, 1926. [Google Scholar] [CrossRef]
- Soares, J.; Silva, N.; Shah, V.; Rodrigues, H. A Road Condition Service Based on a Collaborative Mobile Sensing Approach. In Proceedings of the 2018 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Athens, Greece, 19–23 March 2018; pp. 639–644. [Google Scholar] [CrossRef]
- IEEE. IEEE Standard for Information Technology– Local and Metropolitan Area Networks–Specific Requirements–Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 6: Wireless Access in Vehicular Environments; IEEE Std 802.11p-2010 (Amendment to IEEE Std 802.11-2007 as amended by IEEE Std 802.11k-2008, IEEE Std 802.11r-2008, IEEE Std 802.11y-2008, IEEE Std 802.11n-2009, and IEEE Std 802.11w-2009); IEEE: Piscataway, NJ, USA, 2010; pp. 1–51. [Google Scholar] [CrossRef]
- Cecchini, G.; Bazzi, A.; Masini, B.; Zanella, A. Performance comparison between IEEE 802.11p and LTE-V2V in-coverage and out-of-coverage for cooperative awareness. In Proceedings of the 2017 IEEE Vehicular Networking Conference (VNC), Torino, Italy, 27–29 November 2017; pp. 109–114. [Google Scholar]
- Harkat, Y.; Amrouche, A.; Lamini, E.S.; Kechadi, M.T. Modeling and performance analysis of the IEEE 802.11p EDCA mechanism for VANET under saturation traffic conditions and error-prone channel. AEU Int. J. Electron. Commun. 2019, 101, 33–43. [Google Scholar] [CrossRef]
- Cao, S.; Lee, V.C. An accurate and complete performance modeling of the IEEE 802.11p MAC sublayer for VANET. Comput. Commun. 2020, 149, 107–120. [Google Scholar] [CrossRef]
- Ramanathan, R. An Empirical study on MAC layer in IEEE 802.11p/WAVE based Vehicular Ad hoc Networks. Procedia Comput. Sci. 2018, 143, 720–727. [Google Scholar] [CrossRef]
- Chen, S.; Nai, W.; Dong, D.; Zheng, W.; Jing, W. Key Indices Analysis of IEEE 802.11p based Vehicle to Infrastructure System in Highway Environment. Procedia Soc. Behav. Sci. 2013, 96, 188–195. [Google Scholar] [CrossRef][Green Version]
- Bazzi, A.; Masini, B.M.; Zanella, A.; Thibault, I. On the Performance of IEEE 802.11p and LTE-V2V for the Cooperative Awareness of Connected Vehicles. IEEE Trans. Veh. Technol. 2017, 66, 10419–10432. [Google Scholar] [CrossRef]
- Bazzi, A.; Zanella, A.; Masini, B. A distributed virtual traffic light algorithm exploiting short range V2V communications. Ad Hoc Netw. 2016, 49, 42–57. [Google Scholar] [CrossRef]
- Arena, F.; Pau, G.; Severino, A. V2X Communications Applied to Safety of Pedestrians and Vehicles. J. Sens. Actuator Netw. 2019, 9, 3. [Google Scholar] [CrossRef]
- Silva, C.; Silva, L.; Santos, L.; Sarubbi, J.; Pitsillides, A. Broadening understanding on managing the communication infrastructure in vehicular networks: Customizing the coverage using the Delta Network. Future Internet 2018, 11, 1. [Google Scholar] [CrossRef]
- Sarubbi, J.; Silva, T.; Martins, F.; Wanner, E.; Silva, C. Allocating Roadside Units in VANETs Using a Variable Neighborhood Search Strategy. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017. [Google Scholar] [CrossRef]
- Abboud, K.; Omar, H.A.; Zhuang, W. Interworking of DSRC and Cellular Network Technologies for V2X Communications: A Survey. IEEE Trans. Veh. Technol. 2016, 65, 9457–9470. [Google Scholar] [CrossRef]
- Fitah, A.; Badri, A.; Moughit, M.; Sahel, A. Performance of DSRC and WIFI for Intelligent Transport Systems in VANET. Procedia Comput. Sci. 2018, 127, 360–368. [Google Scholar] [CrossRef]
- Zhou, P.; Liu, Y.; Wang, J.; Deng, W.; Oh, H. Performance analysis of prioritized broadcast service in WAVE/IEEE 802.11p. Comput. Netw. 2016, 107, 233–245. [Google Scholar] [CrossRef]
- Shahen Shah, A.F.M.; Ilhan, H.; Tureli, U. Modeling and Performance Analysis of the IEEE 802.11P MAC for VANETs. In Proceedings of the 2019 42nd International Conference on Telecommunications and Signal Processing (TSP), Budapest, Hungary, 1–3 July 2019; pp. 393–396. [Google Scholar] [CrossRef]
- Song, H.; Lee, H.S. An overview of analytic models of the IEEE 802.11p MAC protocol for vehicle-to-vehicle safety communications and their technical issues. In Proceedings of the 2013 International Conference on ICT Convergence (ICTC), Jeju Island, Korea, 14–16 October 2013; pp. 612–613. [Google Scholar] [CrossRef]
- Yao, Y.; Hu, Y.; Yang, G.; Zhou, X. On MAC Access Delay Distribution for IEEE 802.11p Broadcast in Vehicular Networks. IEEE Access 2019, 7, 149052–149067. [Google Scholar] [CrossRef]
- Wang, L.; Iida, R.F.; Wyglinski, A.M. Performance Analysis of EDCA for IEEE 802.11p/DSRC Based V2V Communication in Discrete Event System. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Bazzi, A.; Cecchini, G.; Menarini, M.; Masini, B.M.; Zanella, A. Survey and Perspectives of Vehicular Wi-Fi versus Sidelink Cellular-V2X in the 5G Era. Future Internet 2019, 11, 122. [Google Scholar] [CrossRef]
- Naik, G.; Choudhury, B.; Park, J. IEEE 802.11bd 5G NR V2X: Evolution of Radio Access Technologies for V2X Communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar] [CrossRef]
- Sjoberg, K.; Uhlemann, E.; Strom, E.G. How Severe Is the Hidden Terminal Problem in VANETs When Using CSMA and STDMA? In Proceedings of the 2011 IEEE Vehicular Technology Conference (VTC Fall), San Francisco, CA, USA, 15–18 September 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Wijngaarden, P.; Eenennaam, M. Frame Capture in IEEE 802.11p Vehicular Networks. In Proceedings of the Second Workshop on the Pervasive Application of Wireless Technologies, Twente, The Netherlands, September 2010. [Google Scholar]
- Anwar, W.; Kulkarni, K.; Augustin, T.R.; Franchi, N.; Fettweis, G. PHY Abstraction Techniques for IEEE 802.11p and LTE-V2V: Applications and Analysis. In Proceedings of the 2018 IEEE Globeco Workshops (GC Wkshps), Abu Dhabi, UAE, 9–13 December 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Saponara, S.; Gagliardi, A. Modeling and Analysis of 802.11p Physical Layer for V2X Connected Transport Systems Considering Harsh Operating Conditions and HW Device Performance. In Proceedings of the 2018 International Conference of Electrical and Electronic Technologies for Automotive, Milano, Italy, 9–11 July 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Moller, A.; Nuckelt, J.; Rose, D.M.; Kurner, T. Physical Layer Performance Comparison of LTE and IEEE 802.11p for Vehicular Communication in an Urban NLOS Scenario. In Proceedings of the 2014 IEEE 80th Vehicular Technology Conference (VTC2014-Fall), Vancouver, BC, Canada, 14–17 September 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Status of Project IEEE P802.11bd. Available online: http://www.ieee802.org/11/Reports/tgbd_update.htm (accessed on 18 April 2020).
- Anwar, W.; Franchi, N.; Fettweis, G. Physical Layer Evaluation of V2X Communications Technologies: 5G NR-V2X, LTE-V2X, IEEE 802.11bd, and IEEE 802.11p. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 21–25 September 2019; pp. 1–7. [Google Scholar]



{kind=link}
{kind=link}
| Contribution | DSRC Analysis | PHY Analysis | MAC Analysis | ITS Analysis | Scope of Literature Review |
|---|---|---|---|---|---|
| Our review | Yes | Yes | Yes | Yes | 2006–2019 |
| [39] | No | Yes | No | No | 2000–2018 |
| [40] | No | Yes | No | Yes | 2004–2016 |
| [41] | Yes | Yes | Partial | Partial | 2000–2016 |
| [42] | Yes | Yes | Yes | Partial | 2000–2010 |
| [43] | Yes | Yes | Yes | Partial | 2010–2017 |
| Paramerers | 20 MHz Bandwidth | 10 MHz Bandwidth | 5 MHz Bandwidth |
|---|---|---|---|
| Bit rate (Mbit/s) | |||
| Modulation mode | BPSK, QPSK, 16QAM, 64QAM | BPSK, QPSK, 16QAM, 64QAM | BPSK, QPSK, 16QAM, 64QAM |
| Code rate | |||
| Number of subcarriers | 52 | 52 | 52 |
| Symbol duration | 4 s | 8 s | 16 s |
| Guard time | 0.8 s | 1.6 s | 3.2 s |
| FFT period | 3.2 s | 6.4 s | 12.8 s |
| Preamble duration | 16 s | 32 s | 64 s |
| Subcarrier spacing | kHz | kHz | kHz |
| Modulation | Coding Rate | Adjacent Channel Rejection (dB) | Nonadjacent Channel Rejection (dB) | Coded Bit Rate (Mbit/s) | Data Rate (Mbit/s) | Data Bits per OFDM Symbols | ||
|---|---|---|---|---|---|---|---|---|
| IEEE 802.11 a/g/n | IEEE 802.11p | IEEE 802.11 a/g/n | IEEE 802.11p | |||||
| BPSK | 16 | 28 | 32 | 42 | 6 | 3 | 24 | |
| BPSK | 15 | 27 | 31 | 41 | 6 | 36 | ||
| QPSK | 13 | 25 | 29 | 39 | 12 | 6 | 48 | |
| QPSK | 11 | 23 | 27 | 37 | 12 | 9 | 72 | |
| 16QAM | 8 | 20 | 24 | 34 | 24 | 12 | 96 | |
| 16QAM | 4 | 16 | 20 | 30 | 24 | 18 | 144 | |
| 64QAM | 0 | 12 | 16 | 26 | 36 | 24 | 192 | |
| 64QAM | 11 | 15 | 25 | 36 | 27 | 216 | ||
| Parameter | IEEE 802.11a | IEEE 802.11p |
|---|---|---|
| Sample rate | 20 MHz | 10 MHz |
| Chip duration | 50 ns | 100 ns |
| Number of fft points | 64 | 64 |
| Number of subcarriers | 52 + DC | 52 + DC |
| Number of data subcarriers | 52 | 52 |
| Number of pilot subcarriers | 4 | 4 |
| OFDM symbol period | = 80 chips = 4 s | 8 s |
| Cyclic prefix | 16 chips = 0.8 s | 1.6 s |
| FFT symbol period | 64 chips = 3.2 s | 6.4 s |
| Modulation scheme | BPSK, QPSK, 16QAM, 64QAM | BPSK, QPSK, 16QAM, 64QAM |
| Coding scheme | industry convulutional | |
| Puncturing | optional puncturing or | or |
| Available data rate | Mbps | Mbps |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arena, F.; Pau, G.; Severino, A. A Review on IEEE 802.11p for Intelligent Transportation Systems. J. Sens. Actuator Netw. 2020, 9, 22. https://doi.org/10.3390/jsan9020022
Arena F, Pau G, Severino A. A Review on IEEE 802.11p for Intelligent Transportation Systems. Journal of Sensor and Actuator Networks. 2020; 9(2):22. https://doi.org/10.3390/jsan9020022
Chicago/Turabian StyleArena, Fabio, Giovanni Pau, and Alessandro Severino. 2020. "A Review on IEEE 802.11p for Intelligent Transportation Systems" Journal of Sensor and Actuator Networks 9, no. 2: 22. https://doi.org/10.3390/jsan9020022
APA StyleArena, F., Pau, G., & Severino, A. (2020). A Review on IEEE 802.11p for Intelligent Transportation Systems. Journal of Sensor and Actuator Networks, 9(2), 22. https://doi.org/10.3390/jsan9020022