Extended Batches Petri Nets Based System for Road Traffic Management in WSNs †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Related Work
- Modelling the traffic in order to predict its evolution in accordance with deploying of the minimum number of sensors.
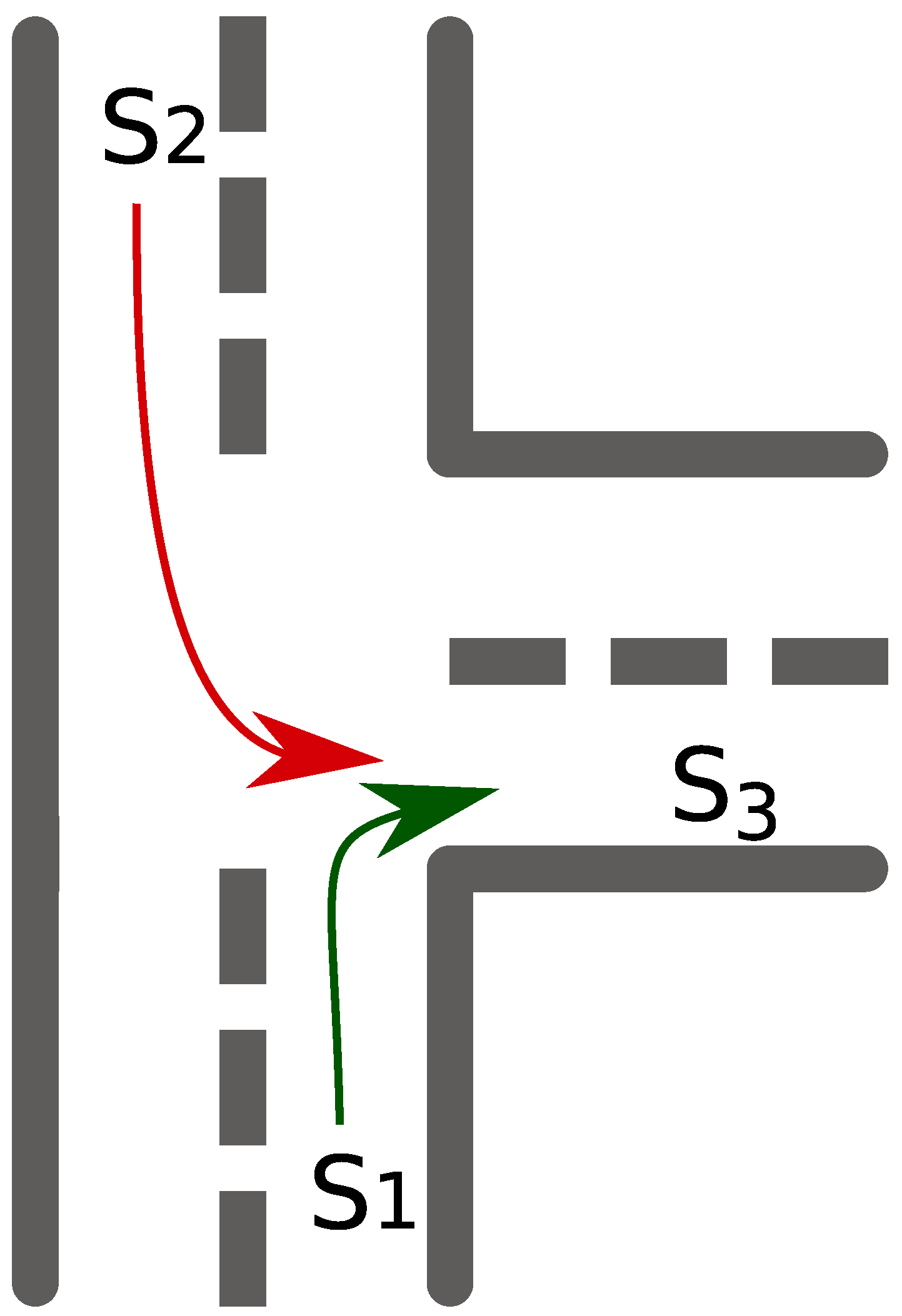
- Estimating vehicles dispatched in a road intersection using statistical models
- Taking into account events for predicting traffic status
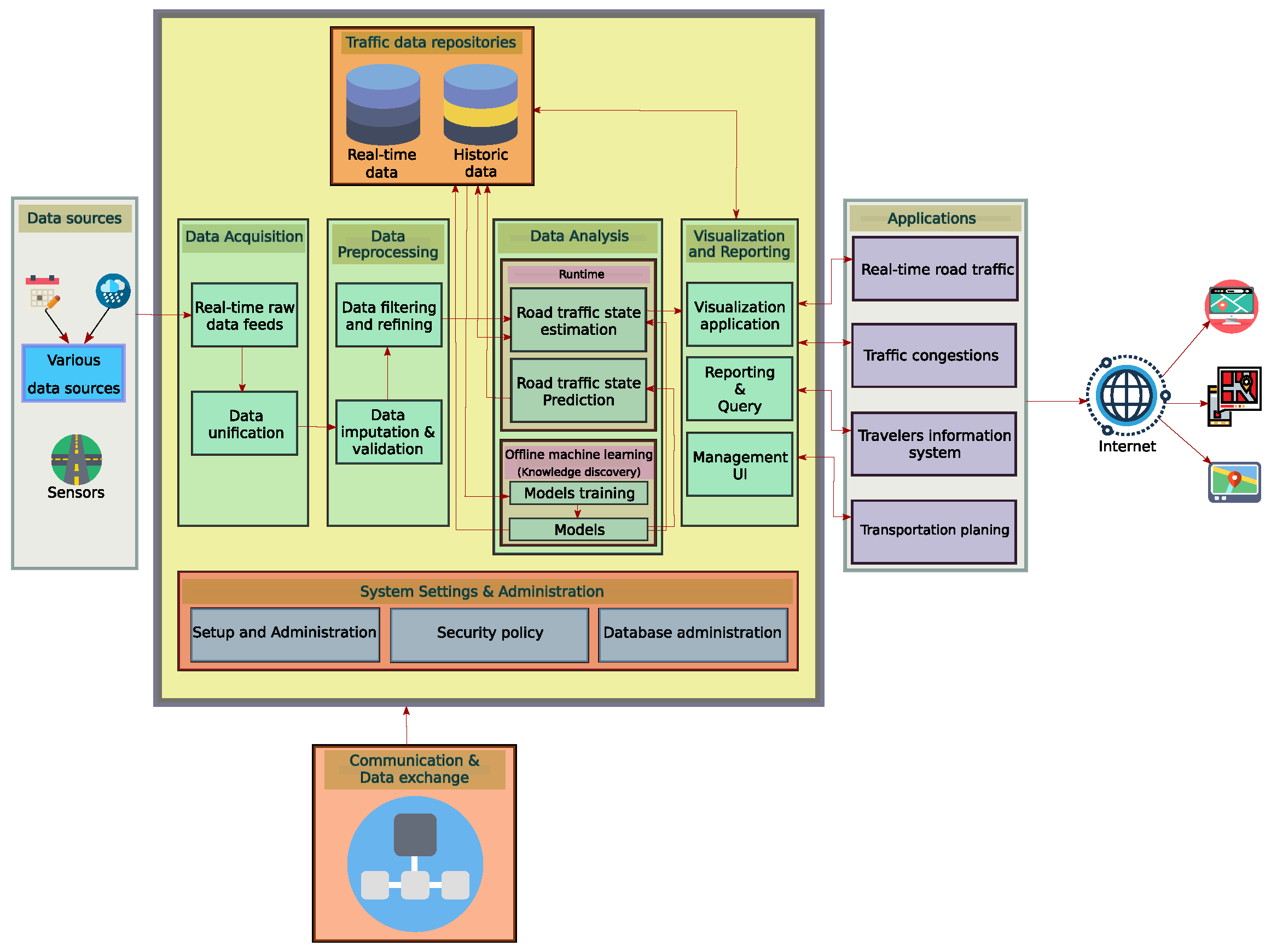
3. WSN-Based Traffic Management System (WTMS)
3.1. Overview of the WTMS
3.2. WTMS Architecture
3.2.1. Acquisition Component
- Pull-based approach: it allows users to selectively acquire and query the data at preferred point in time, within a specific time interval or within a user-defined frequency acquisition.
- Push-based approach: In this approach, data acquisition is executed in regular periods. Data are disseminated proactively through sensors, i.e., the sensors can decide when to send data to a centre node such as a sink.
3.2.2. Data Preprocessing
3.2.3. Data Analysis
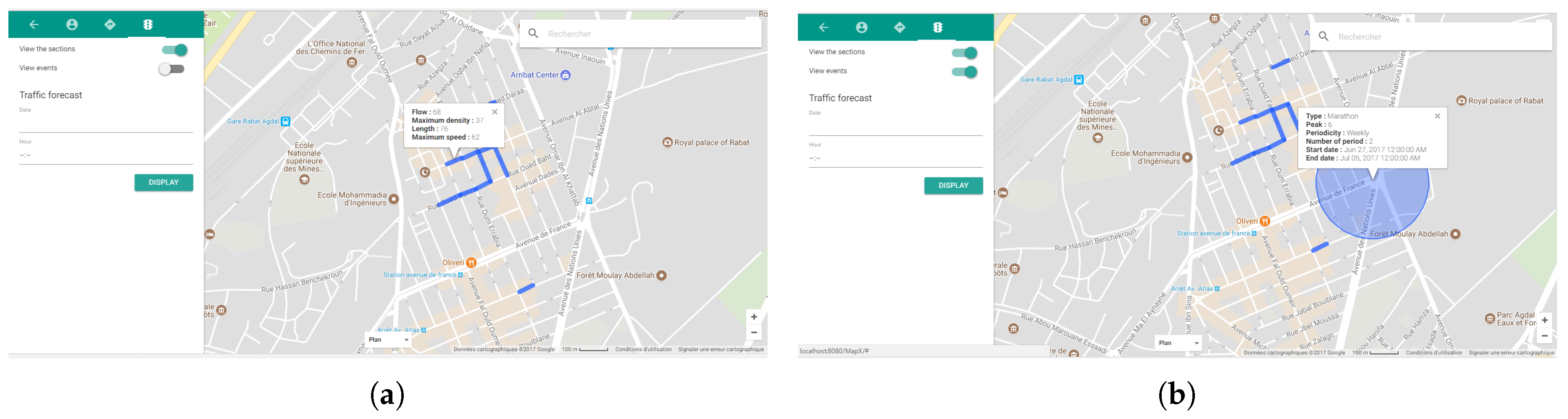
3.2.4. Visualization and Reports
3.2.5. System Settings and Administration
3.2.6. Traffic Data Repositories
3.2.7. Communication and Data Exchange
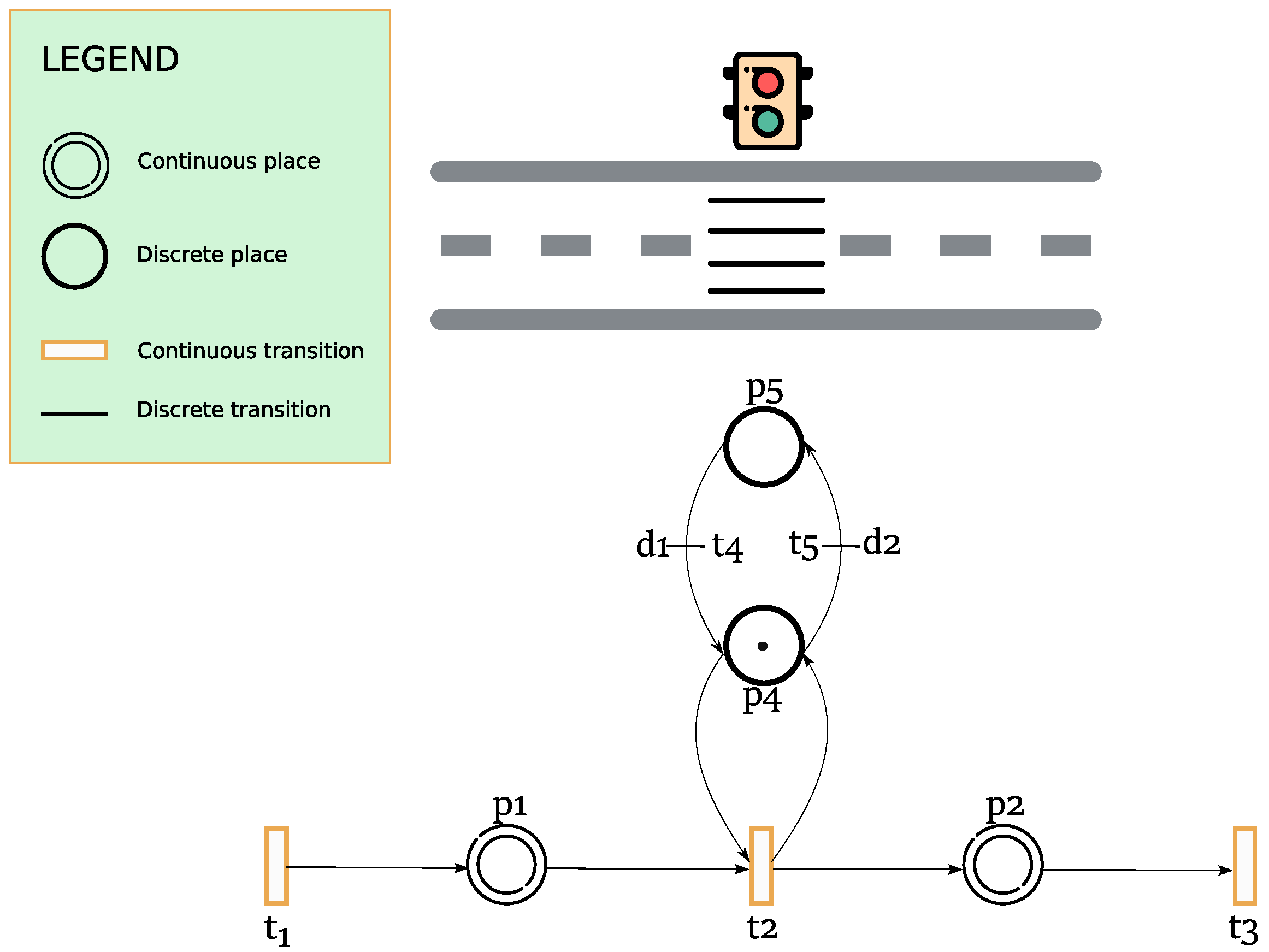
4. Road Traffic State Estimation
4.1. Background on Triangular Batches Petri Net
4.1.1. Petri Nets
- -
- P and T are, respectively, disjoint non-empty finite sets of places and transitions;
- -
- : is the backward incidence matrix, : is the forward incidence matrix.
4.1.2. Generalized Batch Petri Nets
4.1.3. The Triangular Batches Petri Net
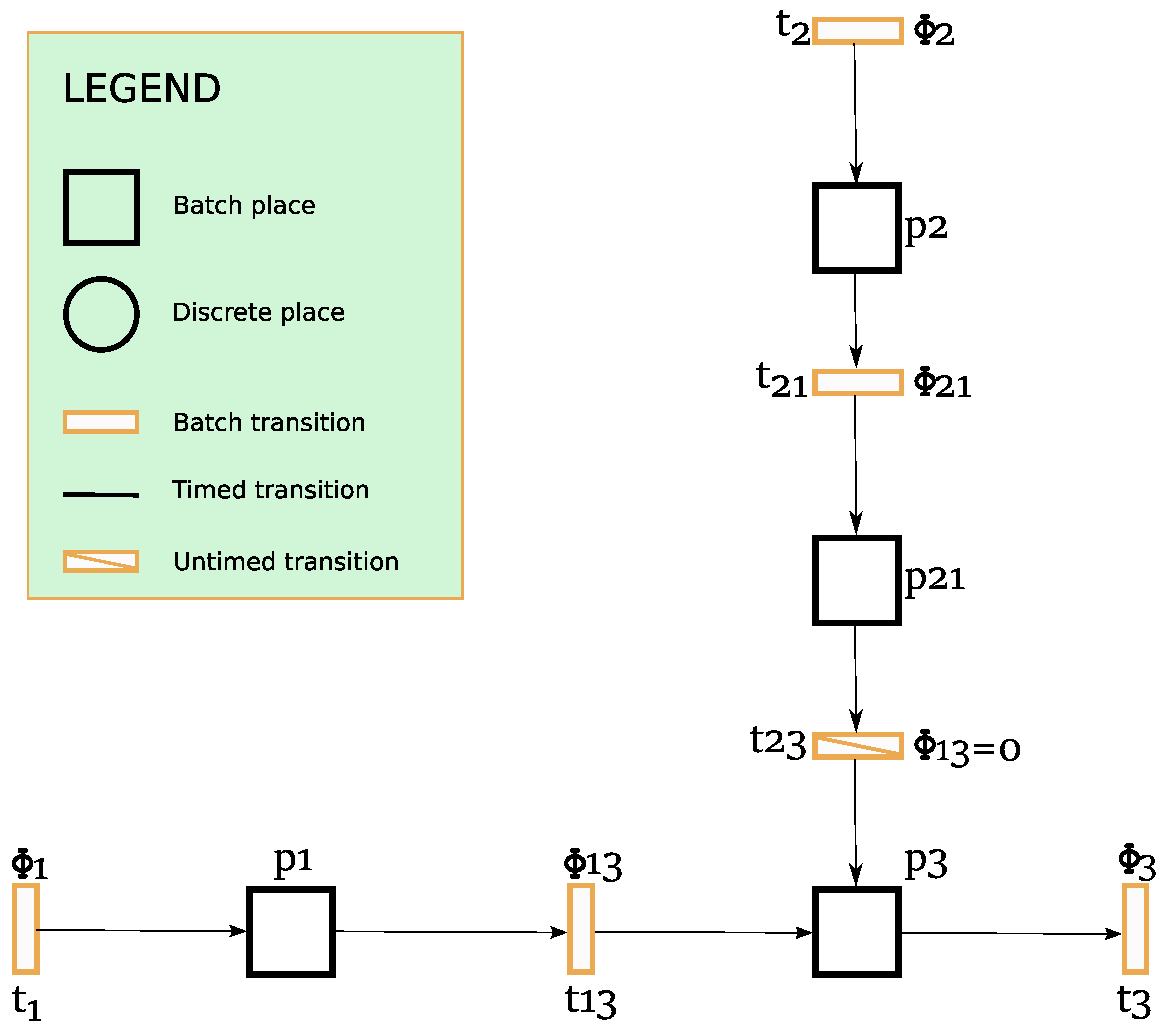
4.2. Our Extension: Generalized Nondeterministic Batch Petri Net
- P, and are respectively the set of places, the pre-incidence and the post-incidence matrices;
- T is a finite set of transitions that are partitioned into the three set of timed , untimed and batch transitions ;
- C is the “characteristic function”. It associates with every batch place three continuous characteristics that represent respectively speed, maximum density, and length and the total number of segments of the batch place;
- f: is an application that associates a non-negative number to every transition:
- if , then denotes the firing delay associated with the timed transition expressed in time unit;
- if , then denotes the maximal firing flow associated with the batch transition expressed in entities/time unit and estimated by statistical models in case of multiple outputs;We use the symbol f to refer to firing rules of transitions which can depend on both delay times and flow rules.
- is the priority of a transition according to the output flow of a place, . This priority’s feature is added to support non-deterministic time based transitions.
5. Implementation
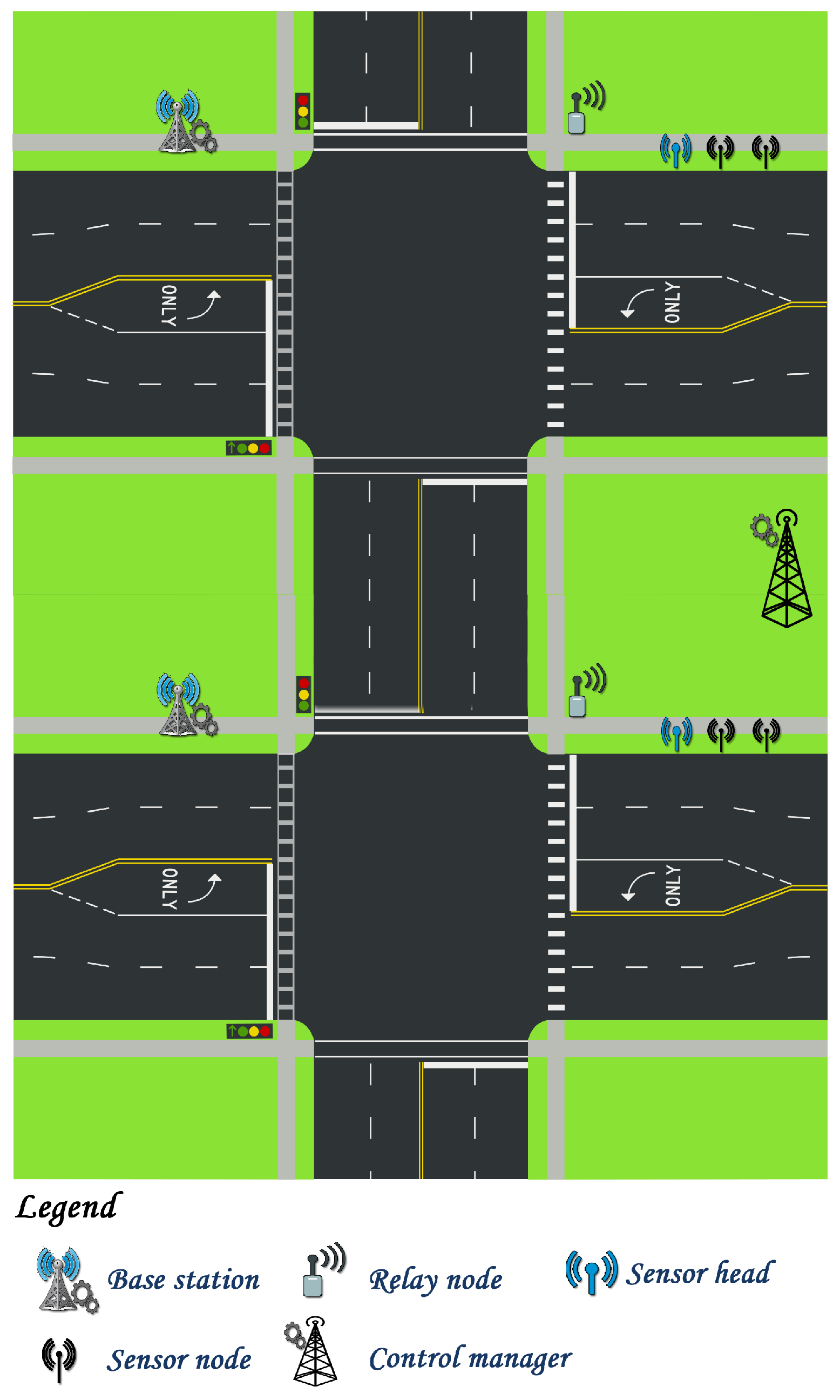
5.1. Deployment Architecture of WTMS
- Sensor nodes: are responsible for detecting traffic flow at points of interest namely the beginning of roads, and sending the real time measurements to the sensor head;
- Relay nodes: are intermediate sensor nodes that are used in case the network is wide and a multi-hope communication is needed;
- Sensor head: The duty of the sensor head is to aggregate the physical traffic parameters that were captured by sensor nodes like density, velocity and to send the aggregated data to the base station.
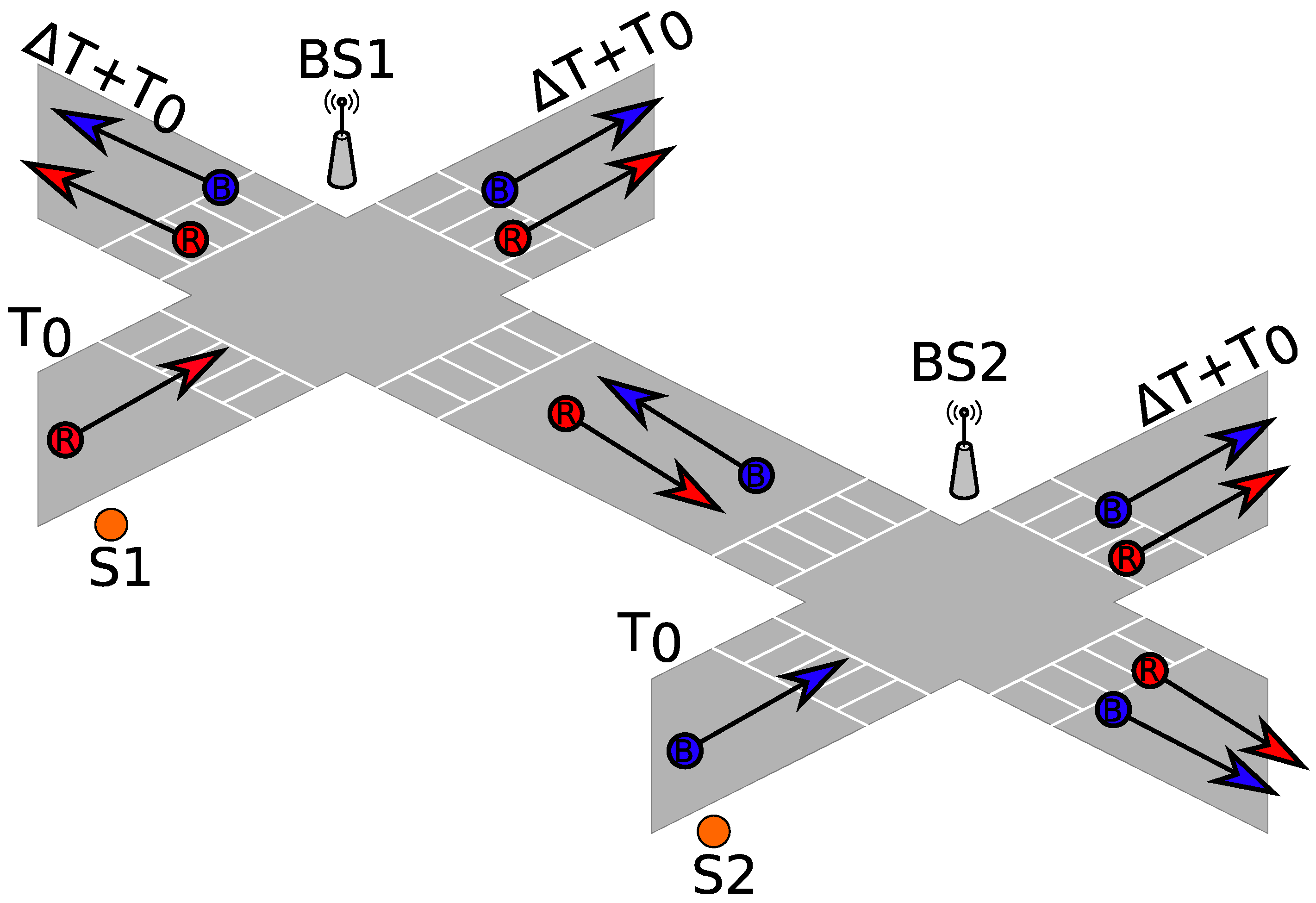
- Base station: The major purpose of base stations is to model and simulate the received traffic flow in the corresponding region and provide its dynamic evolution over time.
- Control manager: provides more coherent traffic flow of the overall road network, while dealing with some of the most common critical situations such as congestion.
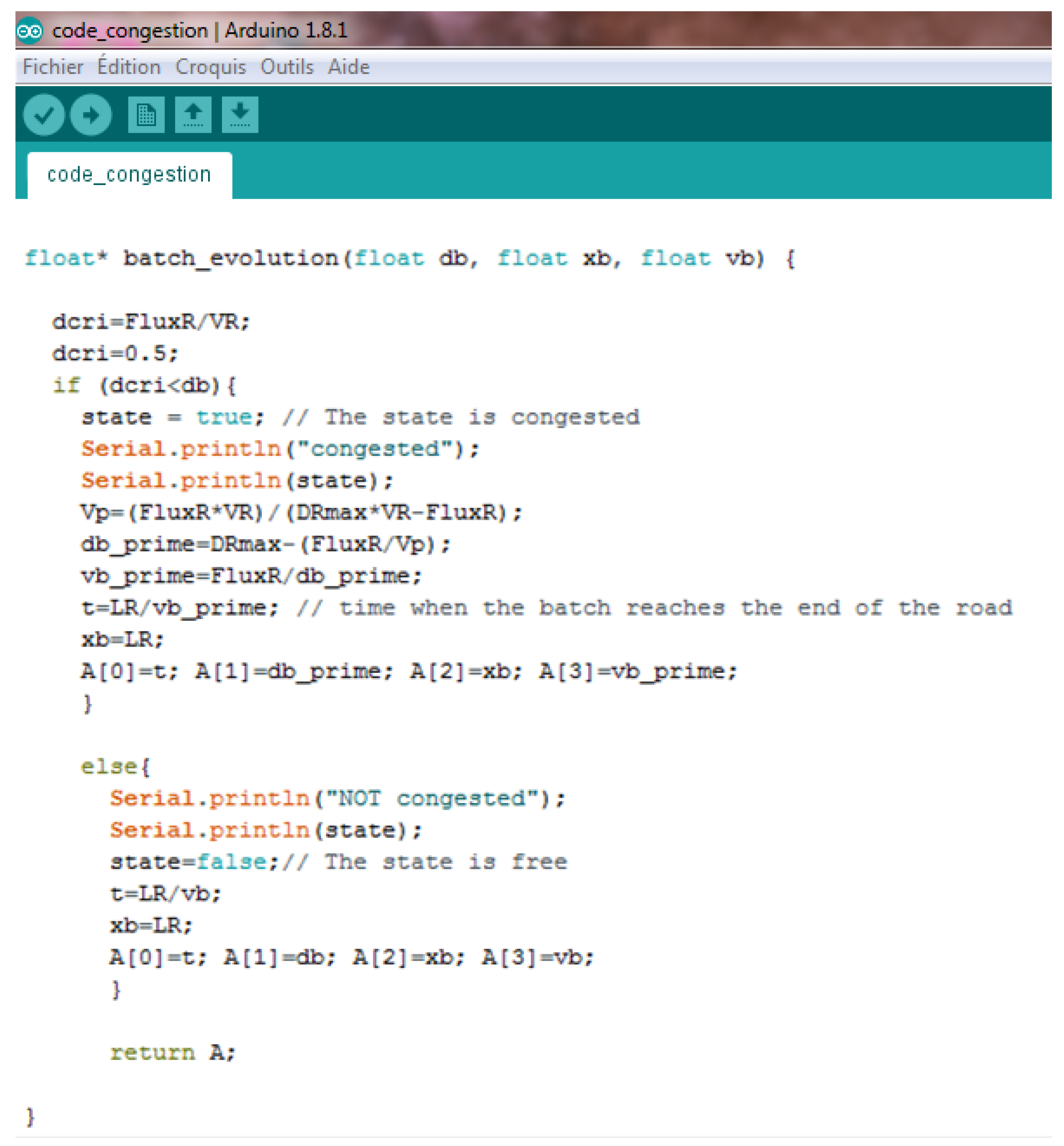
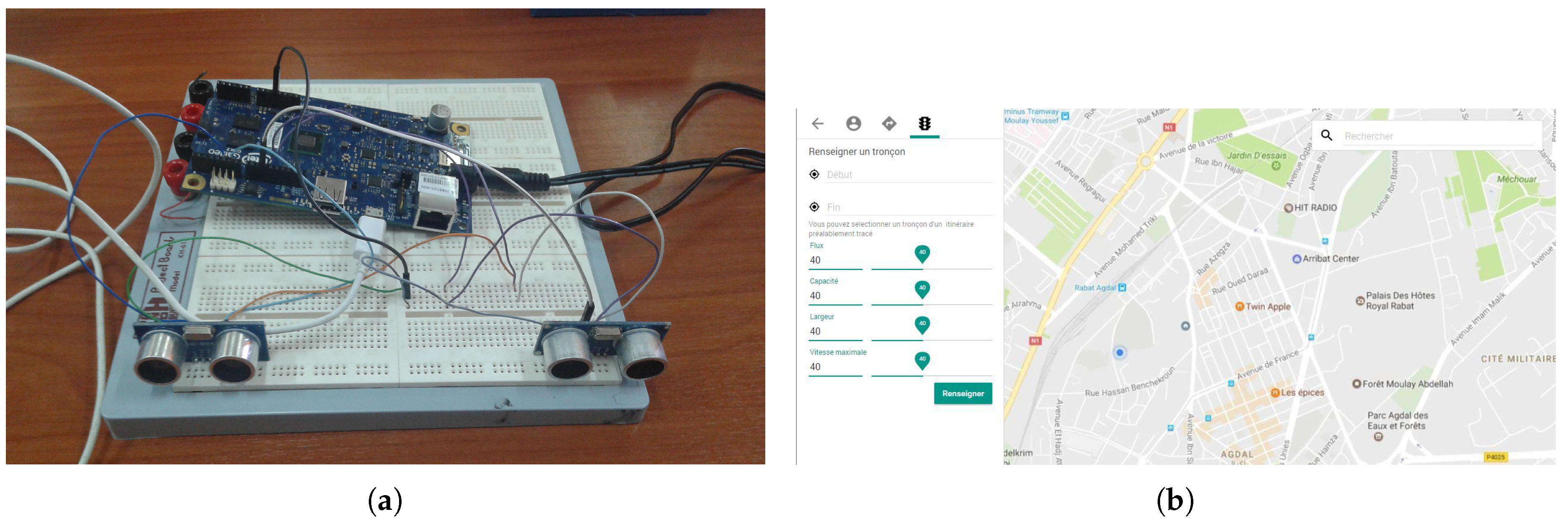
5.2. Prototyping
- The characteristics of the vehicles batch, which are:
- -
- : The density of vehicles batch (veh/km);
- -
- : The position of vehicles batch;
- -
- : The speed of vehicles batch (km/h).
- The characteristics of the road R:
- -
- : The length of the road (km);
- -
- : The maximum density (veh/km);
- -
- : The maximum speed (km/h);
- -
- : The maximum flow (veh/h).
- t: The travel time needed to reach the end of the road;
- : The updated density of vehicles batch;
- : The updated position of vehicles batch;
- : The updated speed of vehicles batch.
- -
- Setting up the computer for development with the Galileo Gen 2 board by installing arduino integrated development environment (IDE) software;
- -
- Writing and Uploading the code: Once the code is created, it has to be compiled and uploaded to the Galileo board.
- -
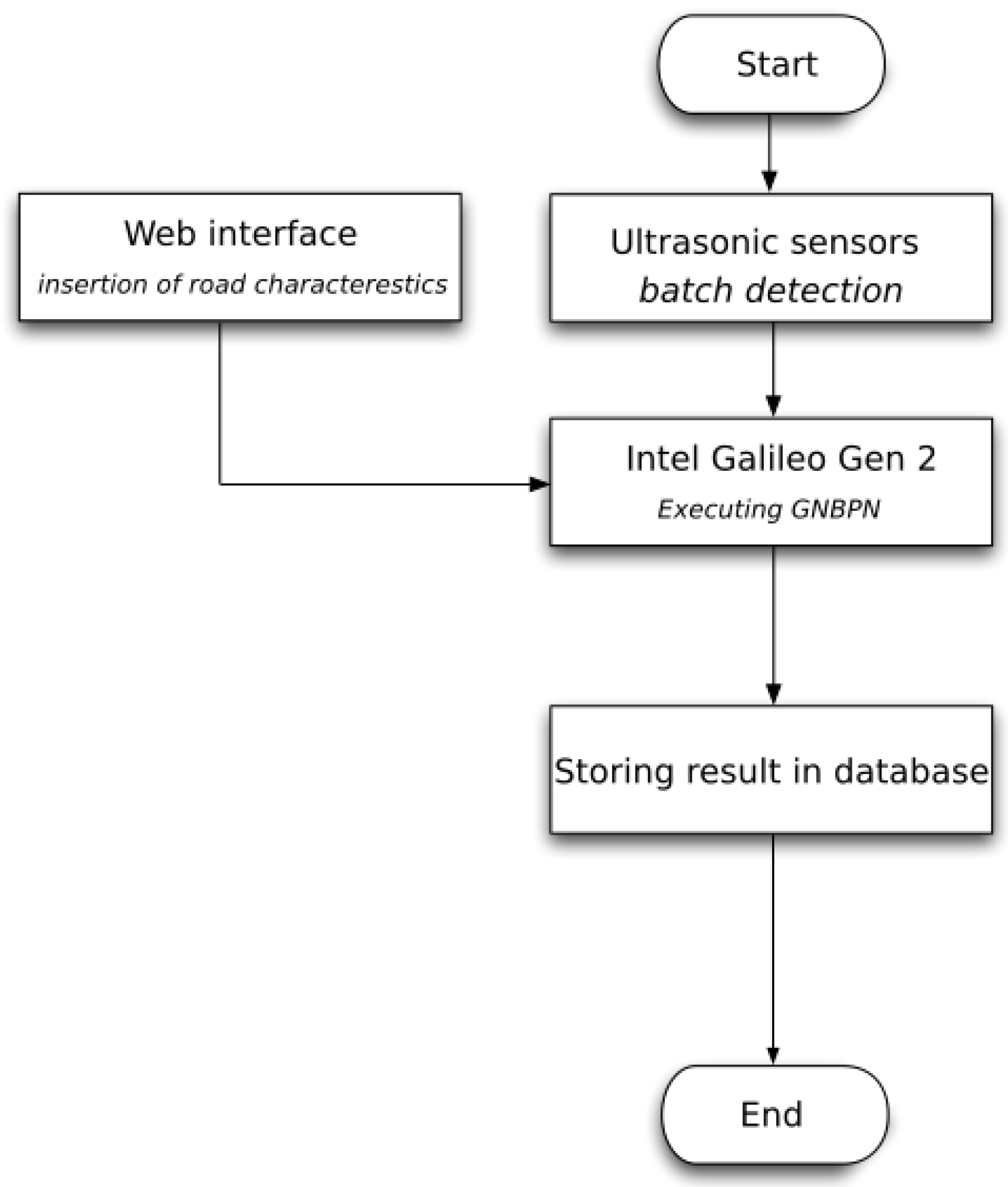
- Obtain the parameters that have already been stored via the web interface into a database
- -
- Interact with sensors for computing cars speed and density
- -
- Perform the simplified version of GNBPN model
- -
- Transmit the result and save it into XAMPP based database server
6. Conclusions
- Implementation of the complete algorithm of our traffic state evolution
- Estimation of intersection turning movements and its implementation
- Using NoSQL database for data storage
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| WSN | Wireless Sensor Network |
| ITS | Intelligent Transportation System |
| ICT | Information and Communication technology |
| VANET | Vehicular Ad-hoc Network |
| HPN | Hybrid Petri nets |
| WTMS | WSN-based Traffic Management System |
References
- Losilla, F.; Garcia-Sanchez, A.J.; Garcia-Sanchez, F.; Garcia-Haro, J.; Haas, Z.J. A Comprehensive Approach to WSN-Based ITS Applications: A Survey. Sensors 2011, 11, 10220–10265. [Google Scholar] [CrossRef] [PubMed]
- Lazarescu, M.T. Design and Field Test of a WSN Platform Prototype for Long-Term Environmental Monitoring. Sensors 2015, 15, 9481–9518. [Google Scholar] [CrossRef] [PubMed]
- Darwish, A.; Hassanien, A.E. Wearable and Implantable Wireless Sensor Network Solutions for Healthcare Monitoring. Sensors 2011, 11, 5561–5595. [Google Scholar] [CrossRef] [PubMed]
- Conti, M. Secure Wireless Sensor Networks: Threats and Solutions; Advances in Information Security; Springer: New York, NY, USA, 2015. [Google Scholar]
- Mason, A.; Al-Shamma’a, A.I.; Shaw, A. Wireless Sensor Network for Intelligent Inventory Management for Packaged Gases. In Proceedings of the 2009 Second International Conference on Developments in eSystems Engineering, Abu Dhabi, UAE, 14–16 December 2009; pp. 413–417. [Google Scholar]
- Zhao, F.; Guibas, L. Wireless Sensor Networks: An Information Processing Approach; Electronics & Electrical; Morgan Kaufmann: Burlington, MA, USA, 2004. [Google Scholar]
- Liu, X.; Cao, J.; Lai, S.; Yang, C.; Wu, H.; Xu, Y.L. Energy efficient clustering for WSN-based structural health monitoring. In Proceedings of the 2011 IEEE INFOCOM, Shanghai, China, 10–15 April 2011; pp. 2768–2776. [Google Scholar]
- Giammarini, M.; Isidori, D.; Concettoni, E.; Cristalli, C.; Fioravanti, M.; Pieralisi, M. Design of Wireless Sensor Network for Real-Time Structural Health Monitoring. In Proceedings of the 2015 IEEE 18th International Symposium on Design and Diagnostics of Electronic Circuits Systems, Belgrade, Serbia, 22–24 April 2015; pp. 107–110. [Google Scholar]
- Bhattacharyya, S.; Deprettere, E.; Leupers, R.; Takala, J. Handbook of Signal Processing Systems; Springer: New York, NY, USA, 2013. [Google Scholar]
- Forster, C.A. Australian Cities: Continuity and Change; Meridian (Melbourne, Australia), Oxford University Press: Oxford, UK, 2004. [Google Scholar]
- Daven, J.; Klein, R. Progress in Waste Management Research; Nova Science Publishers: Hauppauge, NY, USA, 2008. [Google Scholar]
- Engelbrecht, J.; Booysen, M.J.; van Rooyen, G.J.; Bruwer, F.J. Survey of smartphone-based sensing in vehicles for intelligent transportation system applications. IET Intell. Transp. Syst. 2015, 9, 924–935. [Google Scholar] [CrossRef]
- Wang, Y.; Peng, Z.; Wang, K.; Song, X.; Yao, B.; Feng, T. Research on Urban Road Congestion Pricing Strategy Considering Carbon Dioxide Emissions. Sustainability 2015, 7, 10534–10553. [Google Scholar] [CrossRef]
- Alrawi, F. The importance of intelligent transport systems in the preservation of the environment and reduction of harmful gases. Transp. Res. Procedia 2017, 24, 197–203, 3rd Conference on Sustainable Urban Mobility, 3rd CSUM 2016, Volos, Greece, 26–27 May 2016. [Google Scholar] [CrossRef]
- Wang, R.; Xiao, F. Advances in Wireless Sensor Networks: 6th China Conference, CWSN 2012, Huangshan, China, October 25-27, 2012; Revised Selected Papers; Communications in Computer and Information Science; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Bui, K.H.N.; Pham, X.H.; Jung, J.J.; Lee, O.J.; Hong, M.S. Context-Based Traffic Recommendation System. In Context-Aware Systems and Applications: Proceedings of the 4th International Conference, ICCASA 2015, Vung Tau, Vietnam, 26–27 November 2015; Vinh, P.C., Alagar, V., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 122–131. [Google Scholar]
- Ugnenko, E.; Uzhvieva, E.; Voronova, Y. Simulation of Traffic Flows on the Road Network of Urban Area. Procedia Eng. 2016, 134, 153–156, Transbaltica 2015: Proceedings of the 9th International Scientific Conference, Vilnius Gediminas Technical University, Vilnius, Lithuania, 7–8 May 2015. [Google Scholar] [CrossRef]
- Lv, Y.; Duan, Y.; Kang, W.; Li, Z.; Wang, F.Y. Traffic Flow Prediction With Big Data: A Deep Learning Approach. IEEE Trans. Intell. Transp. Syst. 2015, 16, 865–873. [Google Scholar] [CrossRef]
- Hoogendoorn, S.P.; Bovy, P.H.L. State-of-the-art of vehicular traffic flow modelling. Proc. I MECH E Part I J. Syst. Control Eng. 2001, 215, 283–303. [Google Scholar] [CrossRef]
- Arem, V.; Arem, B.V.; Hoogendoorn, S.P. Gas kinetic traffic flow modelling including continuous driver behaviour models. Transp. Res. Rec. J. Transp. Res. Board 2003, 1852, 1–19. [Google Scholar]
- Savrasovs, M. Traffic Flow Simulation on Discrete Rate Approach Base. Transp. Telecommun. J. 2012, 13, 167–173. [Google Scholar] [CrossRef]
- Treiber, M.; Kesting, A. Traffic Flow Dynamics; Springer-Verlag: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Huang, B. GIS coupled with traffic simulation and optimization for incident response. Comput. Environ. Urban Syst. 2007, 31, 116–132. [Google Scholar] [CrossRef]
- Riouali, Y.; Benhlima, L.; Bah, S. Petri net extension for traffic road modelling. In Proceedings of the 2016 IEEE/ACS 13th International Conference of Computer Systems and Applications (AICCSA), Agadir, Morocco, 29 November–2 December 2016; Volume 7, pp. 7–12. [Google Scholar]
- Demongodin, I.; Audry, N.; Prunet, F. Batches Petri nets. In Proceedings of the IEEE Systems Man and Cybernetics Conference (SMC), Le Touquet, France, 17–20 October 1993; Volume 1, pp. 607–617. [Google Scholar]
- Demongodin, I. Generalised Batches Petri Net: Hybrid Model For High Speed Systems With Variable Delays. Discret. Event Dyn. Syst. 2001, 11, 137–162. [Google Scholar] [CrossRef]
- Riouali, Y.; Benhlima, L.; Bah, S. Toward a Global WSN-Based System to Manage Road Traffic. In Proceedings of the International Conference on Future Networks and Distributed Systems, Cambridge, UK, 19–20 July 2017; pp. 28:1–28:6. [Google Scholar]
- Xiao, L.; Peng, X.; Wang, Z.; Xu, B.; Hong, P. Research on Traffic Monitoring Network and Its Traffic Flow Forecast and Congestion Control Model Based on Wireless Sensor Networks. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009; Volume 1, pp. 142–147. [Google Scholar]
- Rahman, M.; Ahmed, N.U.; Mouftah, H.T. City traffic management model using Wireless Sensor Networks. In Proceedings of the 2014 IEEE 27th Canadian Conference on Electrical and Computer Engineering (CCECE), Toronto, ON, Canada, 4–7 May 2014; pp. 1–6. [Google Scholar]
- Nafi, N.S.; Khan, R.H.; Khan, J.Y.; Gregory, M. A predictive road traffic management system based on vehicular ad-hoc network. In Proceedings of the 2014 Australasian Telecommunication Networks and Applications Conference (ATNAC), Southbank, Australia, 26–28 November 2014; pp. 135–140. [Google Scholar]
- Cárdenas-Benítez, N.; Aquino-Santos, R.; Magaña-Espinoza, P.; Aguilar-Velazco, J.; Edwards-Block, A.; Medina Cass, A. Traffic Congestion Detection System through Connected Vehicles and Big Data. Sensors 2016, 16, 599. [Google Scholar]
- Iwasaki, Y.; Misumi, M.; Nakamiya, T. Robust Vehicle Detection under Various Environmental Conditions Using an Infrared Thermal Camera and Its Application to Road Traffic Flow Monitoring. Sensors 2013, 13, 7756–7773. [Google Scholar] [CrossRef] [PubMed]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, (CVPR), Kauai, HI, USA, 8–14 December 2001; Volume 1, pp. I-511–I-518. [Google Scholar]
- Lienhart, R.; Maydt, J. An extended set of Haar-like features for rapid object detection. In Proceedings of the International Conference on Image Processing, Rochester, NY, USA, 22–25 September 2002; Volume 1, pp. I–900–I–903. [Google Scholar]
- Du, R.; Chen, C.; Yang, B.; Lu, N.; Guan, X.; Shen, X. Effective Urban Traffic Monitoring by Vehicular Sensor Networks. IEEE Trans. Veh. Technol. 2015, 64, 273–286. [Google Scholar] [CrossRef]
- Singh, V.; Srivastava, H.; Venturino, E.; Resch, M.; Gupta, V. Modern Mathematical Methods and High Performance Computing in Science and Technology: M3HPCST, Ghaziabad, India, December 2015; Springer: Singapore, 2016. [Google Scholar]
- Mikolajczak, B.; Singh, A. TransCPN—Software Tool for Transformation of Colored Petri Nets. In Proceedings of the 2009 Sixth International Conference on Information Technology: New Generations, Las Vegas, NV, USA, 27–29 April 2009; pp. 211–216. [Google Scholar]
- Martínez, D.; González, A.; Blanes, F.; Aquino, R.; Simo, J.; Crespo, A. Formal Specification and Design Techniques for Wireless Sensor and Actuator Networks. Sensors 2011, 11, 1059–1077. [Google Scholar] [CrossRef] [PubMed]
- Ehrig, H.; Juhas, G.; Padberg, J.; Rozenberg, G. Unifying Petri Nets: Advances in Petri Nets; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]










© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Riouali, Y.; Benhlima, L.; Bah, S. Extended Batches Petri Nets Based System for Road Traffic Management in WSNs. J. Sens. Actuator Netw. 2017, 6, 30. https://doi.org/10.3390/jsan6040030
Riouali Y, Benhlima L, Bah S. Extended Batches Petri Nets Based System for Road Traffic Management in WSNs. Journal of Sensor and Actuator Networks. 2017; 6(4):30. https://doi.org/10.3390/jsan6040030
Chicago/Turabian StyleRiouali, Youness, Laila Benhlima, and Slimane Bah. 2017. "Extended Batches Petri Nets Based System for Road Traffic Management in WSNs" Journal of Sensor and Actuator Networks 6, no. 4: 30. https://doi.org/10.3390/jsan6040030
APA StyleRiouali, Y., Benhlima, L., & Bah, S. (2017). Extended Batches Petri Nets Based System for Road Traffic Management in WSNs. Journal of Sensor and Actuator Networks, 6(4), 30. https://doi.org/10.3390/jsan6040030