1. Introduction
Wireless sensor networks (WSNs) consist of small, inexpensive devices that comprise a low power microcontroller, one or more sensors, and a radio for communication. They are self-organized ad-hoc networks capable of sensing, data processing, and forwarding different physical parameters to a user using multi-hop communications. They offer a flexible, self-adaptable, low-cost solution for a number of distributed monitoring applications, especially in places with limited accessibility. Since batteries are difficult to replace, WSNs must use effective energy management schemes to conserve energy to extend their lifetime. An alternative approach for achieving long term operations in WSNs is to harvest energy from renewable resources, such as sunlight, vibration, heat, etc. However, renewable energy can have wide spatial and temporal variations due to natural (e.g., weather) and location specific factors (e.g., exposure to sunlight) that can be difficult to predict prior to deployment. Consequently, energy management in rechargeable wireless sensor networks must also address the variations of energy availability to avoid localized node outages in the network.
This paper addresses the energy conservation problem as well as the issue of spatio-temporal variations of energy resources in rechargeable WSNs. It is well known that the radio transceiver typically dominates the energy consumption in wireless sensor nodes. The most effective strategy for conserving the energy consumed by the transceiver is by frequently setting it to an energy-conserving sleep mode, which can be achieved by duty-cycling between sleep and wake periods. The key challenge for applying duty-cycling is synchronization of the wake periods between a transmitter and a receiver. If the nodes are time synchronized, then network-wide or local scheduling policies can be applied that can enable nodes to synchronize their wake periods during transmission/reception for successful packet transmissions. However, challenges in achieving network-wide time synchronization and the latency in multi-hop transmissions caused by such synchronized scheduling principles are concerns with this approach. An alternative is to perform duty-cycling
asynchronously, where all nodes wake up briefly at periodic intervals of time to check for transmissions and only remain awake if some activity is detected. Otherwise, the nodes return to their energy-conserving sleep states. Generally, a lengthy preamble is used for each transmitted packet so that the receiving node is able to detect it during its brief wake times. This provides an effective solution for energy conservation in asynchronous WSNs, especially under low data rates. Asynchronous duty cycling has been applied to a number of Low Power Listening (LPL) and preamble sampling MAC protocols [
1,
2]. Asynchronous duty cycling also has its problems, most notably that of energy wastage from
overhearing, where a data packet transmitted to a specific neighboring node is also received (or overheard) by all other unintended neighbors of the transmitting node before being discarded. The long preamble used in LPL exacerbates the problem since the entire data packet must be received before the destination is known. Possible solutions to this overhearing problem include mechanisms for providing additional information in the preamble to enable neighbors to interrupt the reception of long preambles when not needed [
3], adaptive duty-cycling (EA-ALPL, ASLEEP) [
4,
5], and others. Despite these developments, overhearing remains to be a dominating factor in the energy consumption in asynchronous WSNs, especially under high node density and large network sizes.
A number of efforts have been directed in the networking community to design routing protocols that address the energy conservation issue on single-channel sensor networks [
6,
7,
8,
9]. Unfortunately, when only one channel is used, each node suffers from overhearing transmissions from all other nodes within its range, leading to high energy wastage. This problem can be alleviated by using multiple channels in the same network. Using multiple channels also helps in reducing interference as well as the contention in the network that improves the communication performance. Current WSN hardwares such as MICAz [
10] and Telos [
11] that use CC2420 radio, provide multiple channels (16 channels with 5 MHz spacing in between the center frequencies) that can greatly reduce the overhearing problem to conserve energy.
The problems imposed by variations of energy availability can be addressed by using mechanisms to
dynamically adapt their energy consumption based on estimated energy resources [
8,
9,
12,
13,
14]. We demonstrate that dynamic channel selection and routing can solve this problem. However, designing effective mechanisms to jointly select channels and routes for energy management is a complex problem due to the fact that it has to be addressed by
network wide adaptations as opposed to independent adaptations at the nodes.
We consider large-scale WSNs where implementation of network-wide time synchronization is a significant challenge. Hence, these networks must rely on asynchronous duty-cycling for energy conservation where it is critical to avoid energy wastage from overhearing. In this regard, our main contributions of this paper are as follows. First, we motivate the use of multiple channels to alleviate the overhearing problem and thereby improve the network lifetime. We show that the multi-channel allocation problem of sensor nodes is similar to a coalition game formation problem, which is proven to be NP-hard. Second, we develop a route quality and battery-health aware Distributed Routing and Channel Selection (DRCS) scheme that dynamically chooses channels and routes to optimize network lifetime and performance. In addition to adapting to the variable energy consumptions at different nodes that occur due to location issues (such as node density), DRCS also has the capability of adapting to the variations of energy availability at the nodes that arise in energy harvesting WSNs. The objective is to dynamically equalize the remaining lifetimes of nodes as estimated from their current battery capacity and usage. Finally, the performance of DRCS is obtained from experiments using a MICAz testbed as well as from simulations. Performance comparison with an existing multi-channel routing protocol for WSNs is also presented from simulations.
The rest of the paper is organized as follows. In
Section 2, we summarize prior works related to this paper.
Section 3 describes our motivations behind this work.
Section 4 describes our multi-channel routing problem along with its computation complexity. In
Section 5, we discuss our detailed multi-channel routing scheme. Simulation and experimental results of our proposed routing scheme are discussed in
Section 6. We conclude our paper in
Section 7.
2. Related Works
Tree based routing in sensor networks is well-researched. Two very popular tree-based schemes are Xmesh [
15] that is available in Tinyos 1.x [
16], and the Collection Tree Protocol (CTP) [
17] that is available in Tinyos 2.x [
18]. These tree based collection protocols are designed with the objective to provide best effort anycast datagram communication to one of the collection root nodes in the network. At the start, some of the nodes advertise themselves as the root nodes or sink nodes. The rest of the nodes use the root advertisements to connect to the collection tree. When a node collects any physical parameter, it is sent up the tree. As there can be multiple root nodes in the network, the data is delivered to one with the minimum cost. These are
address–free protocols, so a node does not send the packet to a particular node but chooses its next hop based on a routing cost.
Multi-channel routing in wireless networks received a lot of attention in recent times [
19,
20,
21,
22,
23,
24]. However, most of the work published in this area either assume a multi-radio transceiver at each node or generate high control overhead for channel negotiation. These schemes are not suitable for WSNs where each sensor is typically equipped with a single radio transceiver. In addition, overhead must be minimized since energy resources are at a premium. Existing literature on multi-channel MAC protocols may be described in three categories:
scheduled multi-channel schemes,
contention-based multi-channel schemes, and
hybrid schemes. These are discussed in the following:
In scheduled multi-channel schemes, each node is assigned a time slot for data transmission that is unique in its 2-hop neighborhood. An example is
TFMAC, presented in [
25], where the authors consider that time is partitioned in a contention-access period and a contention-free period. In the contention-access period, nodes exchange control messages in a default channel and then in contention-free period, the actual data transmission takes place. In [
26], the authors propose a multi-channel extension of
LMAC [
27] where each transmitting node owns an exclusive time slot, and all nodes wake up at every time slot to avoid missing incoming packets. Initially all nodes are assigned time-slots using single channel LMAC. If there is any slot-less node (i.e., when all the slots are exhausted in its neighborhood), then new channels are introduced. In [
28], authors propose a
Multi-channel MAC (MMAC), where each sensor node notifies its cluster-head if it wants to transmit. Next, the cluster-head distributes the channel assignment information to the sources and destinations. Other cluster based multi-channel schemes are proposed in [
29,
30].
An example of contention-based multi-channel schemes is
Multi-frequency media access control for wireless sensor networks (MMSN) [
31], where the authors consider that time is divided in time slots. Each slot consists of a broadcast contention period and a transmission period. Each node has an assigned receiving frequency. During the broadcast contention period, nodes compete for the same broadcast frequency and during the transmission period, nodes compete for shared unicast frequencies. Another example in this category is [
32], where a
TDMA based multi-channel MAC (TMMAC) is proposed. The authors assume that time is divided into some beacon intervals that consist of an
Ad Hoc Traffic Indication Messages (ATIM) window and a communication window. In the ATIM window, all nodes listen to the same default channel and the sender and receiver decide on which channel and which slot to use for data transmission. Then in each slot of the communication window, nodes adopt negotiated frequencies to transmit and receive packets. Authors in [
33] propose a
Multi-channel Distributed Coordinated Function (MC-DCF), where the backoff algorithm of the IEEE 802.11 distributed coordination function (DCF) is modified to invoke channel switching, in order to improve the network throughput.
Hybrid protocols combine the principles of scheduled and contention based approaches. In [
34], the authors propose a TDMA-based multi-channel MAC protocol. The scheme allocates a time slot to each receiving node, where each slot consists of a contention window and a window for data transmission. A sender first contends for getting access to the channel in the contention window and then the winner transmits in the remaining slot. The scheme uses channel-hopping to take advantage of multiple channels. However, all these schemes require precise time synchronization, which is hard to achieve in WSNs.
Recently, some channel assignment strategies are proposed in [
35,
36,
37] for multi-hop routing in WSNs. In [
35], the authors propose a
Tree-based multichannel protocol (TMCP) where the whole network is statically divided into mutually exclusive single-channel subtrees to reduce interference. In [
38] TMCP is extended to include inter-channel received signal strength models for interference assessment while channel allocation. Authors in [
36] propose a control theory approach that selects channel dynamically to achieve load balancing among channels, whereas in [
37] authors propose a channel assignment scheme for WSNs based on game theory to reduce interference. Authors in [
39] develop a component-based channel assignment scheme where the same channel is assigned to a component formed by nodes belonging to multiple intersecting flows. In [
40] the authors present a multi-channel communication protocol along with transmit power adaptation, where the channels are allocated to network partitions formed by the many-to-one data flows of the network.
All of the above schemes mainly address the problem of reducing network interference. Interference is proportional to packet size as well as packet interval. Generally in WSNs the packet size as well as packet interval are small, thus interference is usually not a primary performance factor. Also, some of the above approaches are either centralized or need the topology information that is not always possible to obtain in WSNs. As opposed to these contributions, the proposed DRCS protocol performs channel selection and routing together for improving the battery lifetime in WSNs, which is the main contribution of this paper. Furthermore, DRCS is distributed, adaptive, can be applied without time synchronization, and requires a single transceiver per node.
3. Motivation Behind This Work
Typical low-powered wireless sensor platforms such as MICAz nodes draw about 20 mA of current while transmitting and receiving (To be precise, the current consumption of a MICAz mote is 17.4 mA and 19.7 mA in transmit and receive modes respectively [
10]. However, for our discussions and performance evaluations we assume an approximate value to 20 mA for these two modes.), whereas they draw about 20
A in idle mode and 1
A in sleep mode. This explains the need for minimizing radio active periods for achieving energy efficiency. As stated earlier, popular energy efficient wireless sensor networking protocols such as
[
15] employs low-power (LP) operation by letting nodes duty cycle in their sleep modes for brief periods of time to detect possible radio activity and wake up when needed. While this principle extends the battery life (lifetime) of the nodes considerably, a key factor that leads to energy wastage is
overhearing, i.e., receiving packets that are intended for other nodes in the neighborhood.
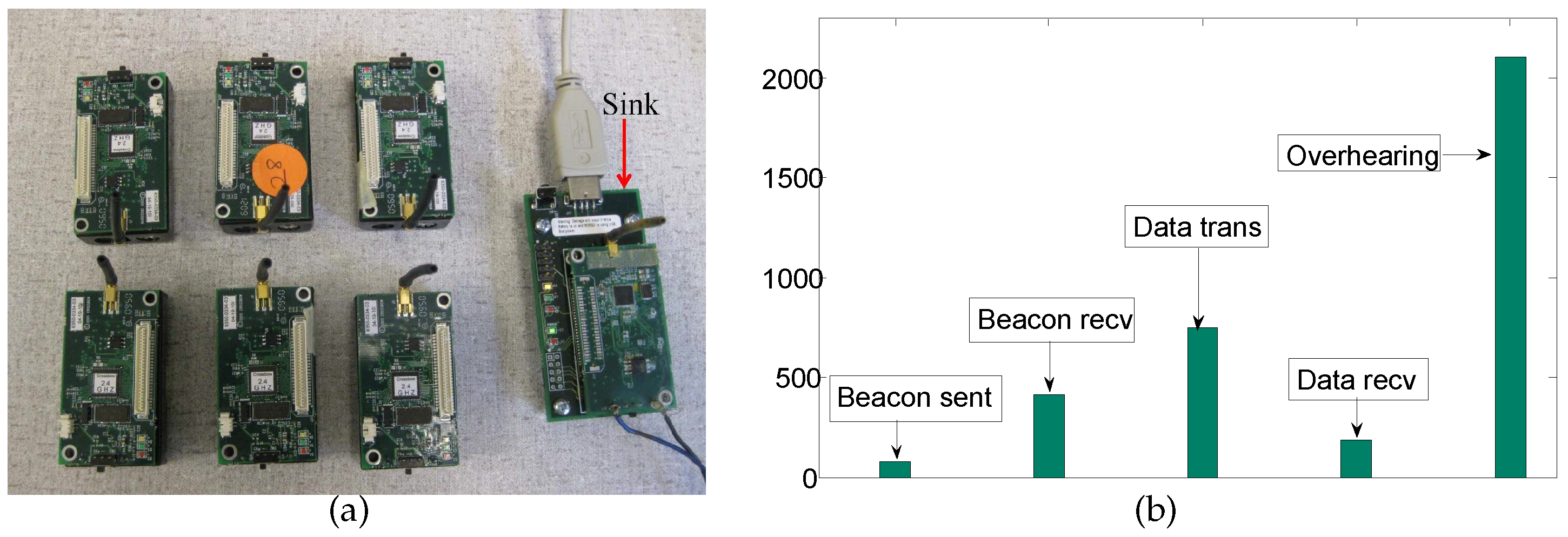
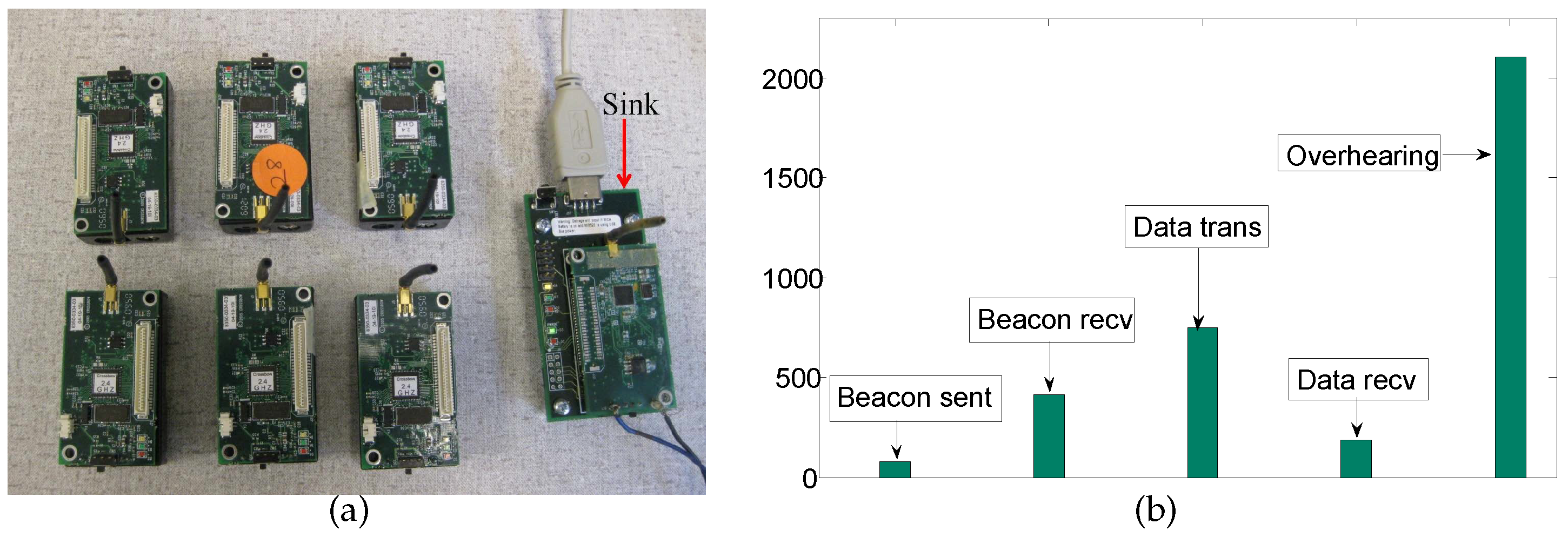
The effect of overhearing is illustrated in
Figure 1, which depicts an experiment using six MICAz motes and a sink. The network is programmed with the
collection tree protocol (CTP) [
17] application where each node transmits periodic data packets comprising of sensor observations with an interval of 10 s and routing packets (beacons) with an interval that varies between 0.128 and 512 s, similar to
Trickle algorithm used in CTP. The network uses the beacons to build link quality based least-cost routes from all nodes to the sink. All nodes use an extremely low transmit power of
dBm and apply the
LowPowerListening scheme [
41] with a wake-up interval of 125 milliseconds. We run this experiment for 10 min and record the total number of beacons and data packets sent/received throughout the network as well as the network wide overhearing. The results, shown in
Figure 1b, indicate that even with sleep cycles, overhearing is a dominating factor in the energy consumption in the nodes. Consequently, a mechanism to optimally distribute the network traffic over multiple channels would lead to reduction in overhearing and significant improvement in the lifetime of the network.
In addition to reducing overhearing, a second consideration for improving the network lifetime is to address the effect of
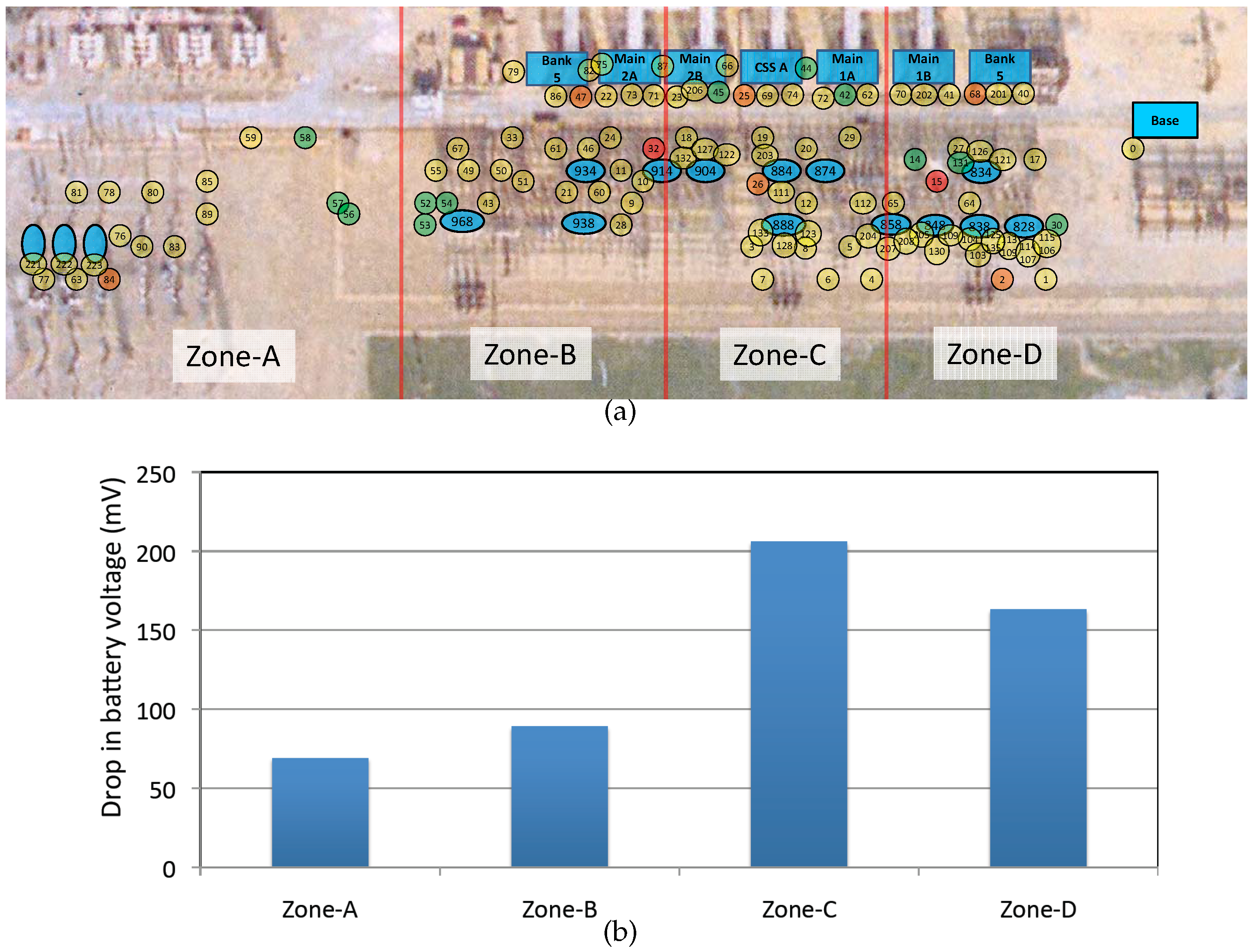
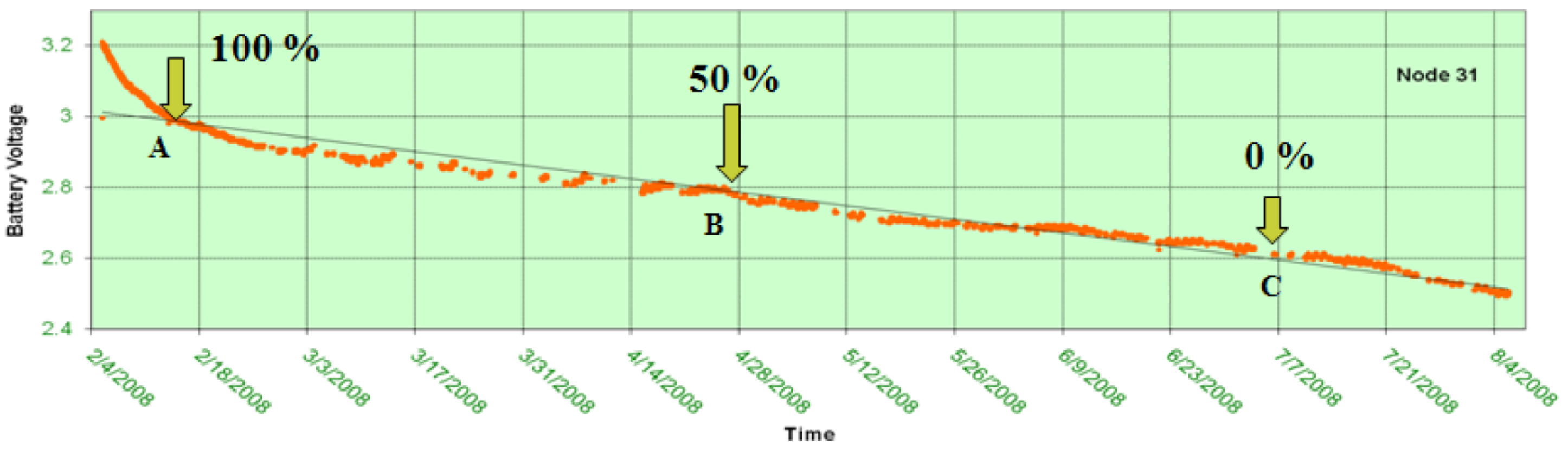
differential battery drainage among the nodes. This is motivated by experimental observations from a real-life WSN that was developed by the authors for monitoring the health of equipment in a power substation. The project, sponsored by EPRI, was initiated in 2006, which led to the deployment of a 122-node WSN known as
ParadiseNet in a TVA-operated power substation in Kentucky [
42]. The location site and an illustration of a deployed wireless sensor node is depicted in
Figure 2. The sensor nodes were deployed in a
feet area, which use a link-quality based routing protocol.
Figure 3a depicts the location of nodes in
ParadiseNet and
Figure 3b depicts the average drops in the battery levels in the four regions of the network over a period of five months of operation. It can be observed that while nodes closer to the base station generally have higher voltage drops, Zone C has the highest drop. This is basically due to the fact that sensor nodes in Zone C are responsible for forwarding most of the packets from Zone A and Zone B. In addition, nodes from Zone C also experience higher amount of overhearing traffic. This type of energy imbalance ultimately results Zone C nodes to deplete their batteries earlier than the ones in other zones which collectively result in network partitioning and decrease in the lifetime of the network. Consequently, it is important that in addition to addressing the overhearing problem, the routing and channel selection scheme should balance the energy consumption of the nodes so that the network lifetime is maximized.
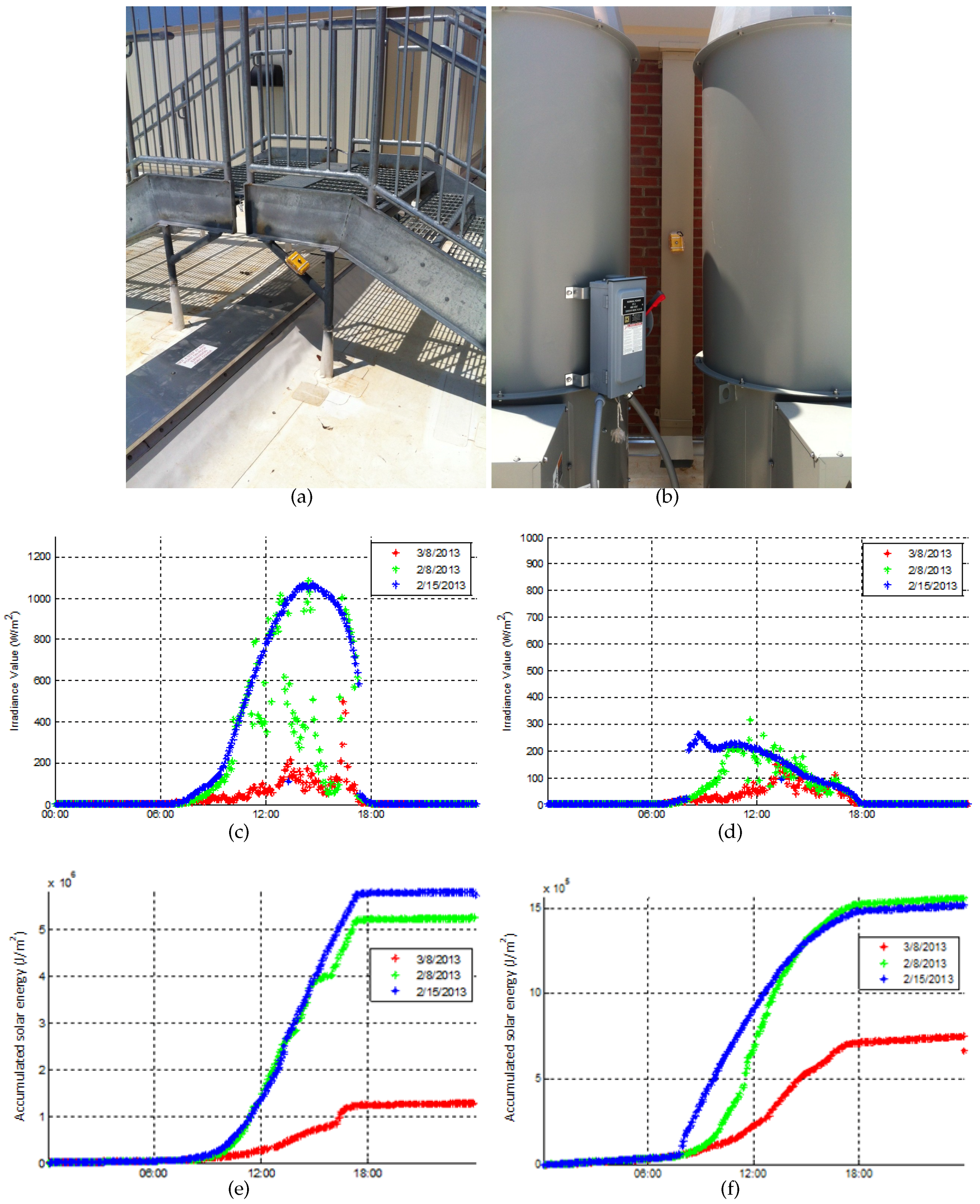
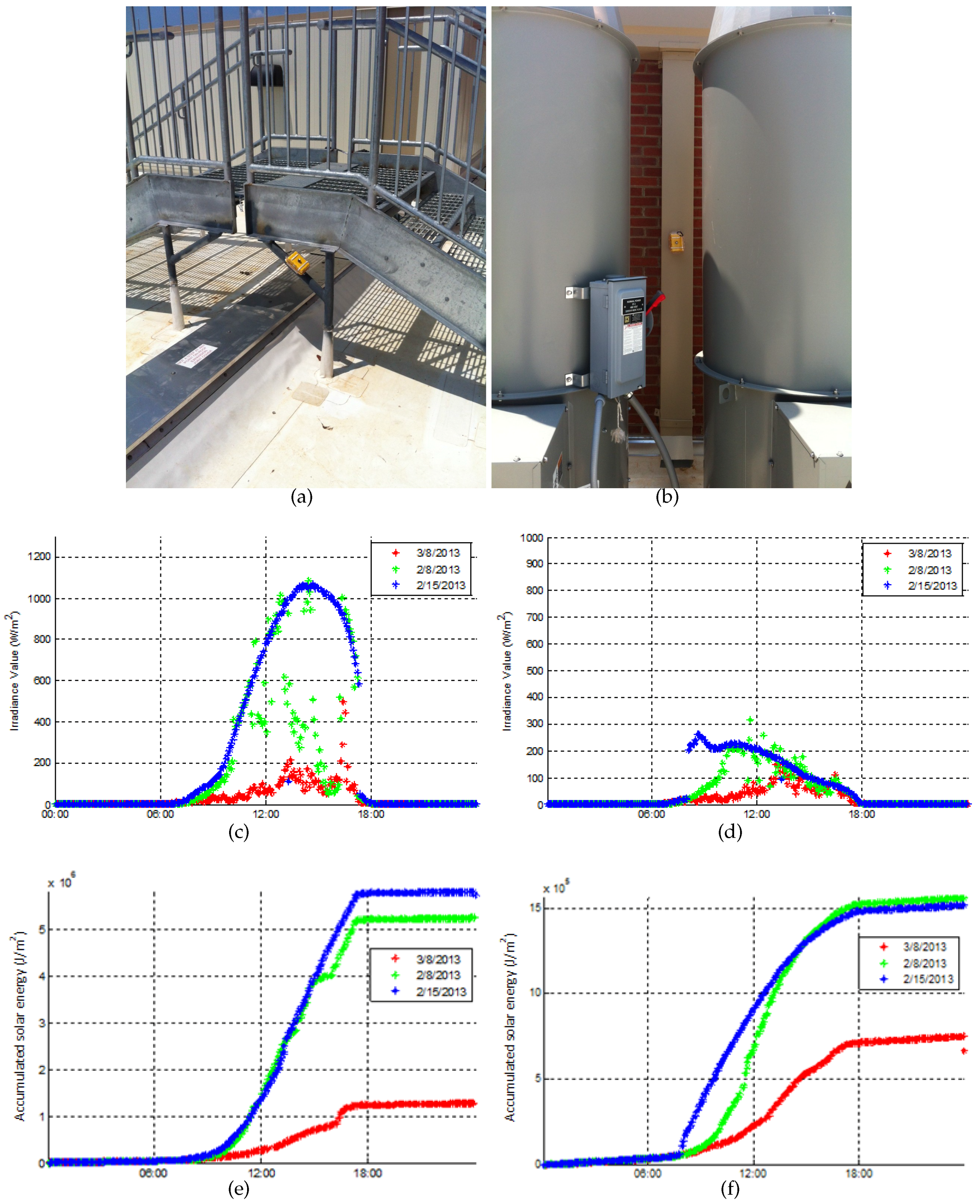
In addition to variations in energy consumption, rechargeable WSNs are also characterized by significant variations in terms of energy availability from the renewable energy sources. Consider a network of solar energy harvesting rechargeable sensor nodes that are deployed in an outdoor location. Since node placement is driven by sensing needs, it is likely that individual nodes will see variations resulting from the effects of shading, reflections, and orientation. Changes of weather and solar irradiance also change solar power intake over time. To illustrate such spatio-temporal variations from a real network setting, we developed a WSN testbed named
EPIC-RoofNet, which comprises of a set of pyranometer sensor nodes [
43] that are used to obtain solar irradiance data from wireless sensor nodes placed in outdoor settings. EPIC-RoofNet was deployed in the roof of the Energy Production and Infrastructure Center (EPIC) building at UNC Charlotte to provide an experimental platform for this research.
In
Figure 4 we show the positions of two motes along with their irradiance measurements in three different days, illustrating high variations in the amount of irradiance over both time and space. As shown in
Figure 4, node 153 has an unobstructed view of the sky, whereas node 157 is placed between two large exhaust vents that provide significant shading throughout much of the day. Furthermore, the latter node is oriented vertically, meaning that it receives reduced contribution from the direct normal component of the radiant flux.
Figure 4c–f show the irridiance measurements of these two nodes as well as their accumulated solar energy over different times of the day. Note that the peak irradiance value observed by node 153 is approximately 1000 W/m
2, which is expected to be the peak irradiance value at the surface of the Earth [
44]. However, the vertical orientation and shading cause a significantly different pattern to be observed at node 157.
In addition to the spatial effects noted above, individual nodes are also subject to various temporal variations. This phenomena can be classified into high and low frequency categories. Weather patterns can cause high frequency fluctuations as passing clouds can momentarily reduce direct irradiance.
Figure 4c–f demonstrate this effect by presenting the observed irradiance at the nodes on three different days. Where as weather variations have high frequency, seasonal variations are considered to be low frequency. Seasonal variations are caused by fluctuations due to slow changes within the Earth’s rotation around the sun. Furthermore, it can be observed that the amount of irradiance to be present within a day is directly related to the time at which the sun rises and sets. All these observations motivate the need for developing adaptive schemes that address the spatio-temporal variations of energy availability.
5. Towards a Completely Distributed and Dynamic Approach
However, implementing a distributed coalition formation game in a WSN environment has several limitations in terms of its applicability in practical scenario. First, such a game requires significant amount of information exchange in between the sensor nodes due to its iterative nature. Also they need to be in common channel at the time of this information exchange. Second, the information exchange in between the sensor nodes need to be completely reliable, i.e., the convergence criteria requires no packet loss. This is hard to obtain in lossy wireless networks. Third, such a game theoretic scheme is suitable for static environments. In a rechargeable sensor networks, due to the varying energy availability, such coalition formation game needs to be repeated to take into account the network dynamics which is onerous in terms of additional information exchange. Fourth, the assignment will be repeated again if some nodes will join or leave the network, which is common in a rechargeable environment. To cope with this, we propose a completely distributed and dynamic routing and channel assignment scheme in this section.
5.1. Proposed DRCS Scheme
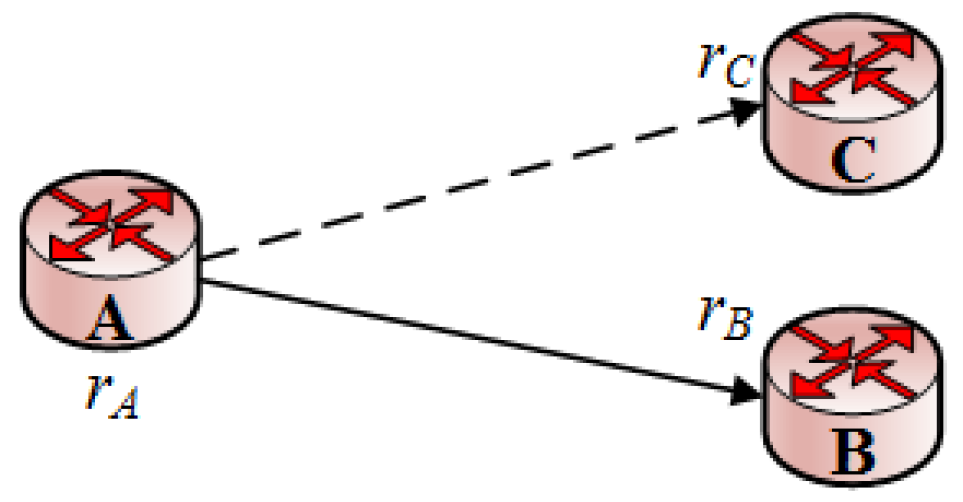
The proposed distributed channel selection and routing scheme DRCS for single-radio WSNs distributes transmission over multiple channels to dynamically adapt the current consumption in the nodes so that their remaining lifetimes are balanced. This extends the overall lifetime of the network. We define the receiver channel of a node to be its designated channel for receiving all incoming packets.
On the other hand, a
transmit channel is the channel to which a node switches temporarily to transmit, which is the receiver channel of its intended destination. According to DRCS, nodes select their receiver channels to enable distribution of traffic over multiple channels. Since nodes listen to their receiver channels by default, overhearing is limited to neighboring transmissions on a node’s receiver channel only. Transmit channels are chosen dynamically to prolong the lifetime of the
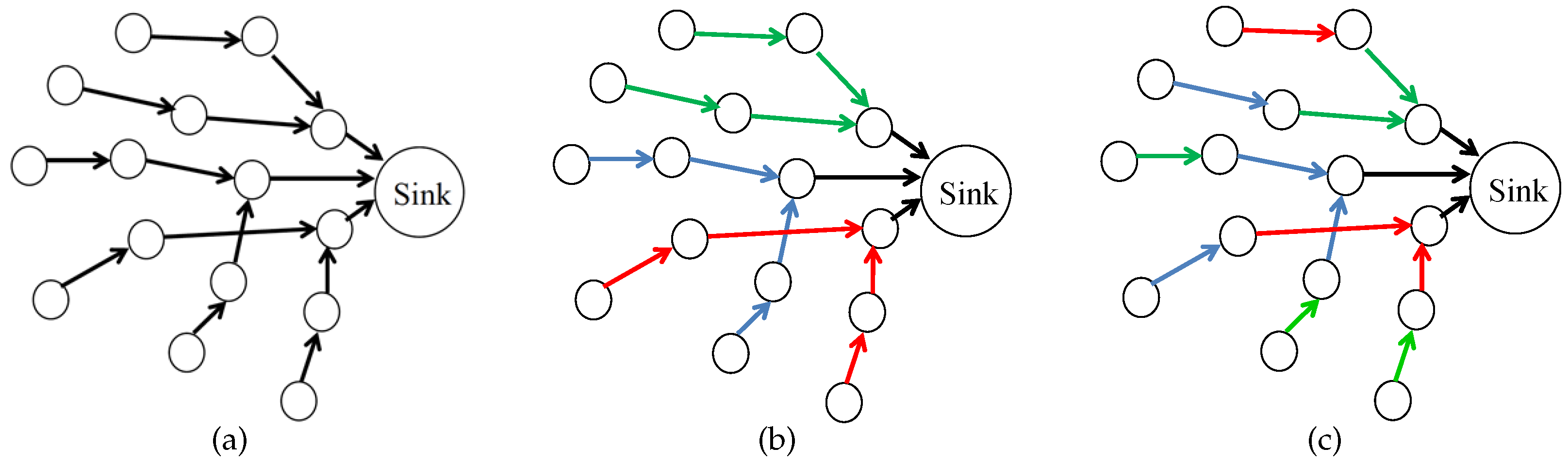
neighboring node with the worst battery health-metric. For example in
Figure 7, assume that
,
,
are the receiver channels of the senor nodes
A,
B and
C respectively. At any time instance if
A chooses
B to be its parent, then it switches to
at the time of transmission, and then switches back to
when the transmission is over. At a different time instance if
A chooses
C to be its parent, it switches to
while transmitting. Thus notice that channel selection is tied to parent selection, which leads to route determination. Hence the proposed approach leads to a
joint channel selection and routing in the WSNs.
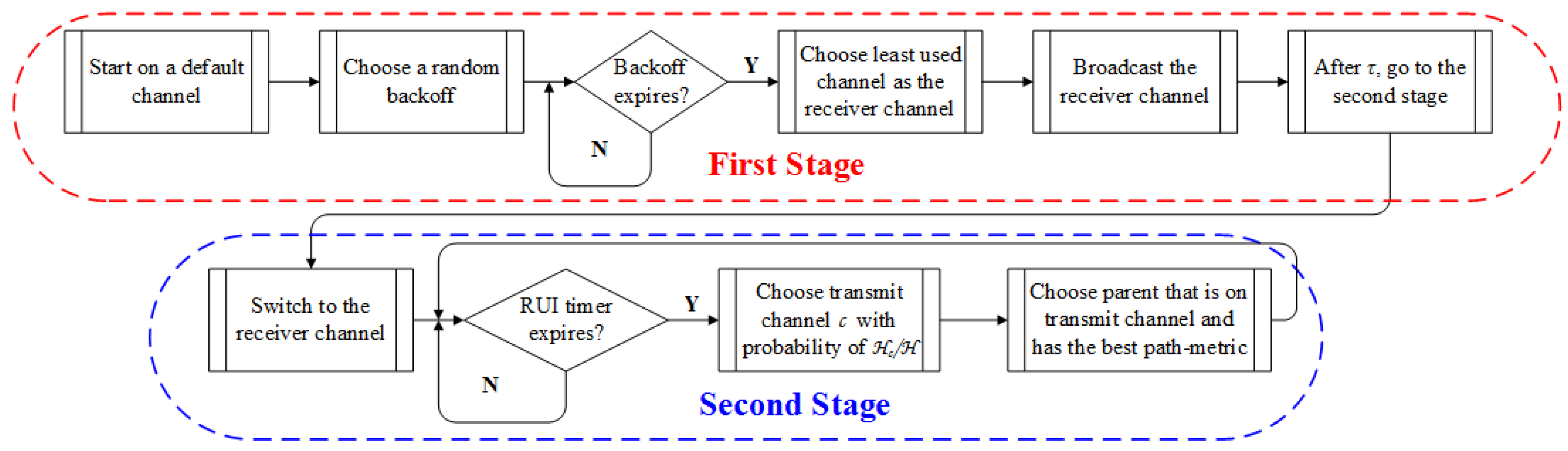
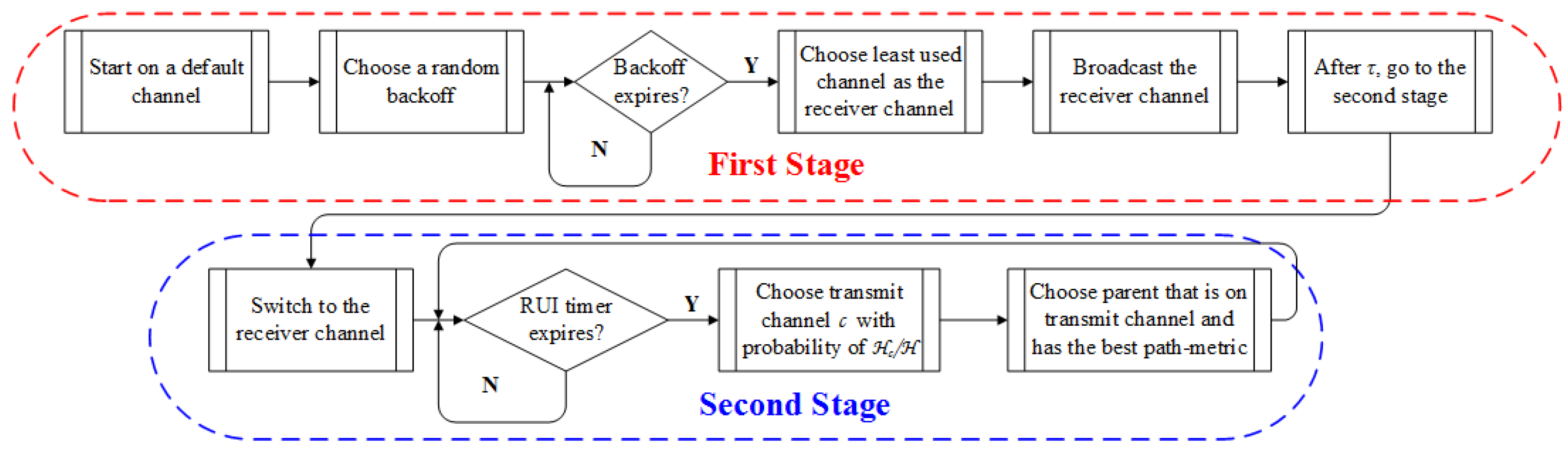
As shown in
Figure 8, the channel selection scheme in DRCS runs in two stages, which is described below. We assume that all nodes broadcast periodic beacon messages, which include their node ID, their receiver channel, the ETX value, and their battery health-metrices.
First stage: In this stage, all nodes use a common default channel. Each node chooses a random backoff (this ensures that nodes choose channels one after another) and selects the least used channel in its neighborhood when the backoff timer expires. This channel becomes the node’s receiver channel, which it announces to its neighbors via beacon packets. If there are multiple channels that are least used, the tie is broken by choosing a random channel among the channels that make the tie. The purpose of such receiver channel selection is to ensure that the receiver channels are uniformly distributed throughout the network. All nodes store their neighbors as well as the neighbors’ receiver channel information. After a certain time interval , the second stage begins.
Second stage: In the second stage, all nodes switch to their receiver channels. In this stage, nodes dynamically perform parent selection, and consequently, their transmit channels, based on periodic assessments of the battery health and ETX parameters. This is done as follows. For any channel c, each node calculates = min{} ∀ where is the set of neighbors that are in receiver channel c and is the health metric of node i. In order to transmit to the sink, nodes that are immediate neighbors of the sink switch to the common default channel for transmitting DATA packets (we assume that the sink always remains in the default channel). All other nodes choose a transmit channel c with a probability of , where ∀ channel c in the node’s neighborhood such that there is at least one neighbor that is in channel c, whose ETX is less than the node’s ETX. The term ensures that the receiver channel of the node with the worst health-metric is chosen with the lowest probability. This mechanism minimizes the overhearing for the neighboring node that has the worst health-metric. After choosing the transmit channel, a node chooses the parent among all its neighbors on c that has the best path metric to the sink. Nodes choose transmit channels as well as their parents in periodic intervals, called route-update intervals (RUI).
The routing and channel selection scheme should ensure that new nodes that are added to the network at any time are able to connect to the network and send information to the sink. In our proposed scheme, this is ensured by sending the beacon messages in different channels in rotation. Hence, a new node is always able to receive beacons from its neighbors and can connect to the network, irrespective of its initial choice of a default channel.
5.2. Key Characteristics of DRCS
The proposed routing and channel selection scheme has several desirable characteristics that are summarized below:
Adaptation to the battery state: The battery state of a node is taken into account by the term B. If the battery condition of any node deteriorates, the value of its health-metric will drop. This will result in a lower probability of selection of that node’s channel by its neighboring nodes for DATA transmission, resulting in reducing its current consumption. Variability in the battery states of the sensor nodes is an inherent property of both battery-powered and rechargeable sensor networks. However, in rechargeable WSNs the battery states of the nodes vary relatively frequently over time. DRCS has the ability to dynamically adapt the routes and transmit channels to cope up with this energy variations.
Load balancing between nodes: If a node’s load increases, its will increase, causing its health-metric to decrease. This will cause that node’s channel to be chosen with lower probability in the next RUI. Also after choosing the transmit channel, a parent is chosen based on the lowest ETX. Thus, if a parent is overloaded, its ETX will increase, resulting in other nodes to avoid selecting that node.
Load balancing between channels: If a channel is overused, the forwarding and overhearing traffic on that channel will increase. This will decrease the health-metric of the nodes in that channel. Thus, that channel is avoided in the next RUIs with higher probability.
Route quality: The ETX value quantifies the quality of a route. The route quality is important as bad routes result in higher retransmissions, which reduce the network lifetime.
Channel quality: DRCS favors selection of channels with better quality, i.e., lower interference, as follows. A high level of channel interference will result in higher number of retransmissions and overhearing on that channel, causing the health-metrices of the nodes on that channel to reduce. Consequently, the corresponding channel will be chosen with lower probability in the next RUIs.
The proposed scheme does not incur any additional control overhead other than periodic beacon updates. Also,
idle listening is avoided by using low-power listening. Problems such as routing loop detection and repairing are tackled similar to CTP. One possible drawback of the DRCS is energy wastage and delay associated with channel switching, which occurs when the receiver and transmit channels of a node are different. However, we show that data collection application with low data rates, this does not impact the performance. For high data rate applications, frequent channel switching may result in some data loss. However, in [
45] the authors have shown that for CC2420 radios the channel switching time is ∼0.34 milliseconds, which results in
the additional energy consumption of less than ∼2%. This makes the proposed dynamic channel selection scheme particularly appealing in practical settings.
6. Performance Evaluation
This section presents the performance of DRCS as obtained from tests conducted on an experimental testbed as well as from simulations. We first demonstrate that our proposed multi-channel scheme effectively reduces overhearing in comparison to CTP using an experimental testbed comprising of 18 MICAz motes. Note that in the following performance results, single channel operation refers to CTP. We also show the effectiveness of the dynamic channel selection scheme based on individual node’s battery health metrices. To show the performance of our scheme in a larger network, we implement this scheme in the
Castalia simulator [
50] on a 200-node network. Finally, we compare the performance of DRCS with a well-known channel assignment scheme TMCP [
35]. Parameters pertinent to the experiments and simulations are listed in
Table 1. The sensing current and duration is obtained corresponding to the onboard temperature sensor (a surface mount thermistor) of the MTS300 integrated sensor board [
51].
6.1. Evaluation in an Experimental Testbed
We implement our proposed scheme DRCS in TinyOS using MICAz motes that use LowPowerListening with wake-up intervals of 125 milliseconds. The beacon interval, DATA interval and
are chosen to be 30, 60 and 180 s respectively. The transmit power is chosen to be
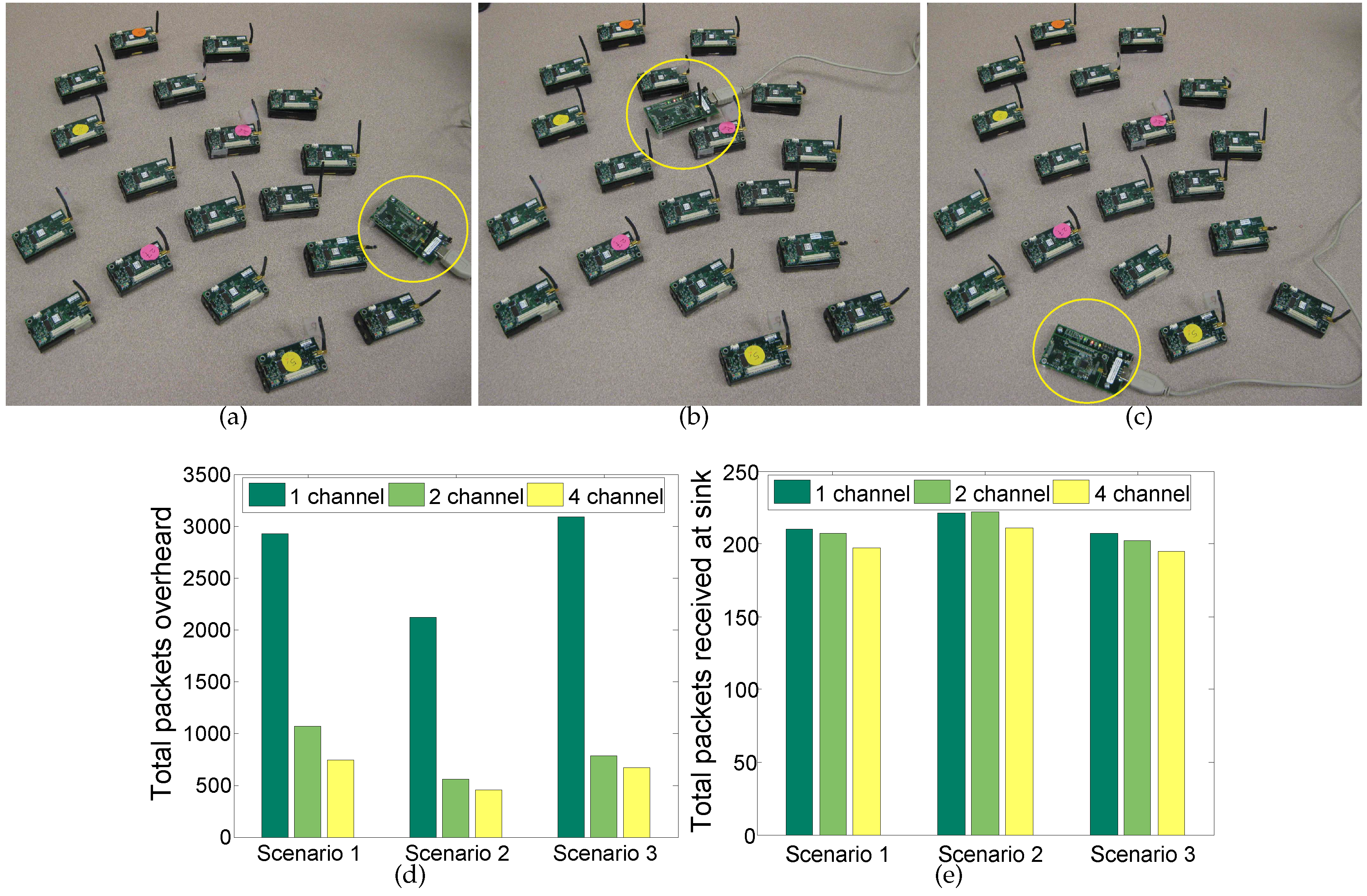
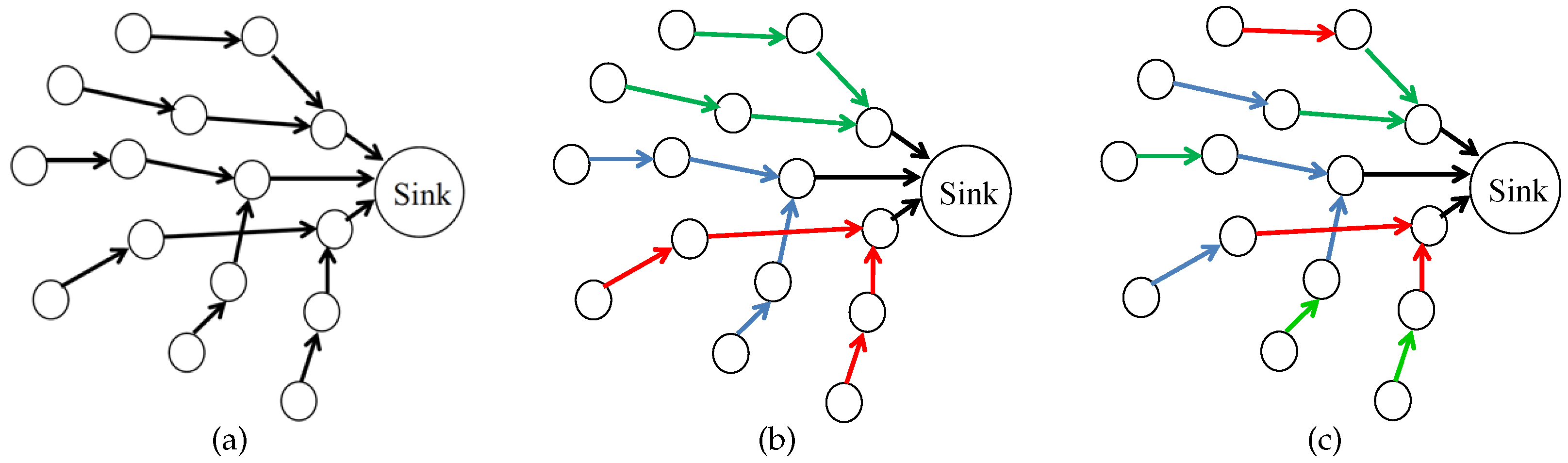
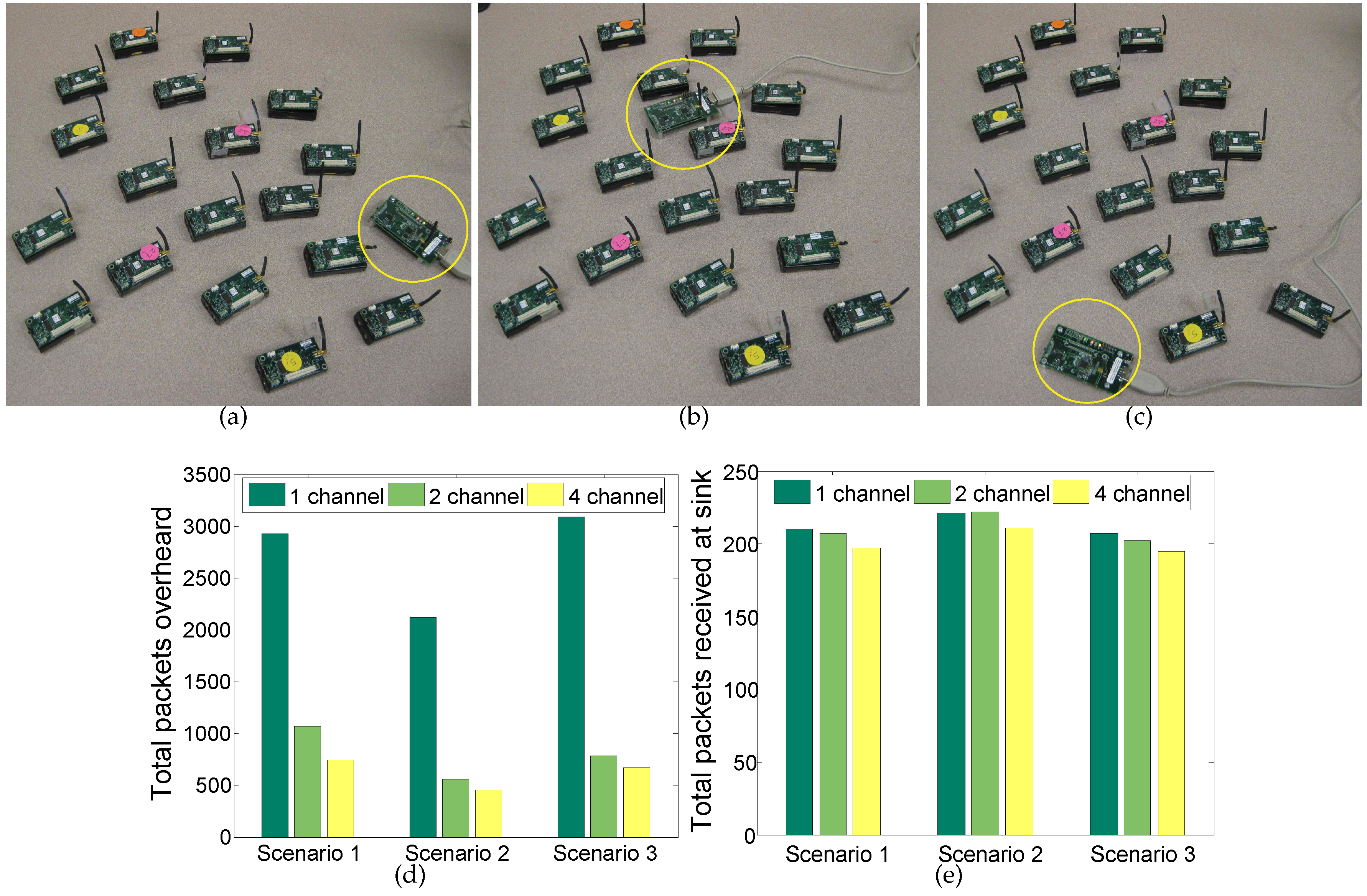
dBm to enable multi-hop communications in a small place. We place 18 motes that periodically sense and forward sensor data to the sink using our proposed multi-channel routing scheme DRCS. The position of the sink is varied to form three different network topologies as shown in
Figure 9a–c. For ease of obtaining packet counts, we disable retransmissions. The results obtained over a duration of 15 min are shown in
Figure 9d,e. It is observed that in all three topologies, the number of packets received at the sink drops only marginally with increasing number of channels, even with no retransmissions. This implies that the packet delivery performance is not affected by channel switching in these data-rates. However, there is a significant reduction in the total number of overhearing packets by using 2 and 4 channels. With just 2 channels, the overhearing is reduced to
. This experiment demonstrates that DRCS can significantly reduce energy wastage due to overhearing without sacrificing the delivery performance.
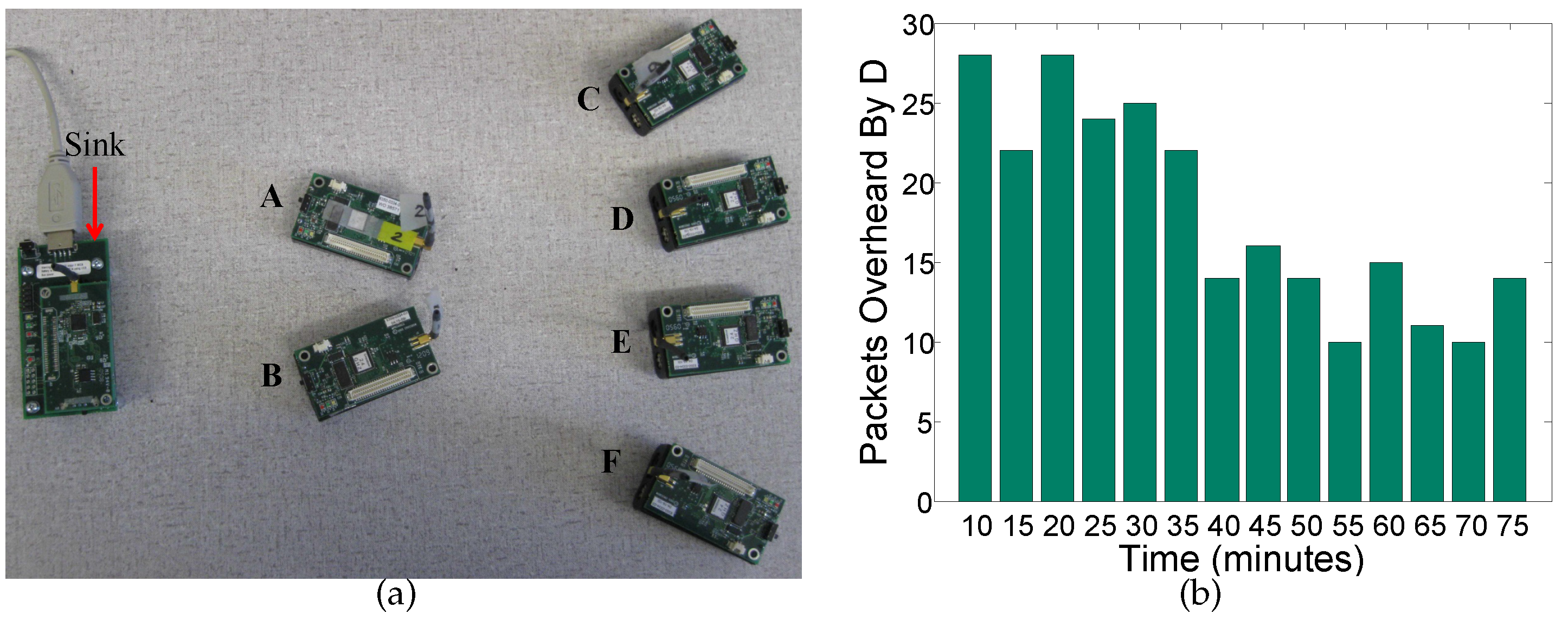
To show the effectiveness of the dynamic channel selection scheme, we set up a small network as shown in
Figure 10a, and monitor the variations of the number of packets overheard in a specific node when its battery voltage (and hence, its capacity) is changed manually. In this experiment, we use only 2 channels and a data interval of 15 s. Initially, the battery capacities of all nodes are made to be 100%. After 30 min, the battery voltage of node D (provided by a programmable power supply) is reduced to artificially represent a capacity of 50%, keeping all others unchanged. This is done to artificially introduce a temporal energy variation at node D, and demonstrate how DRCS adapts to such energy variations.
Figure 10b shows the variation of the number of packets overheard by node D over time. Each bar on the x-axis shows the number of overheard packets by D over time blocks of 5 min duration. It can be observed that after 30 min the overhearing on node D starts reducing as all other nodes switch their transmit channels to avoid the receiver channel of D. This experiment demonstrates that our proposed scheme helps in reducing energy consumption at a node with bad health-metric, which can occur due to deteriorating battery health.
6.2. Simulation Results
We conduct simulations to evaluate the performance of our proposed scheme in a larger network and to also evaluate the lifetime improvement achieved by DRCS. A deployment area of m is assumed, where the nodes are deployed uniformly. The transmission power is assumed to be 0 dBm. The initial battery capacities of the nodes are assumed to be uniformly (randomly) distributed between 75% to 100%. The capacity of a fresh battery (100% capacity) is assumed to be 5000 mAH. The random variations in battery capacities allow us to evaluate how DRCS performs energy management and optimize the network lifetime under arbitrary energy variations. The beacon interval is set to 30 s and the maximum retransmission count is set to 30. We assume a log-normal shadowing model with path-loss exponent n = 2.4, and channel variance = 4 dBm. The path loss at a reference distance = 1 m is assumed to be of 55 dBm.
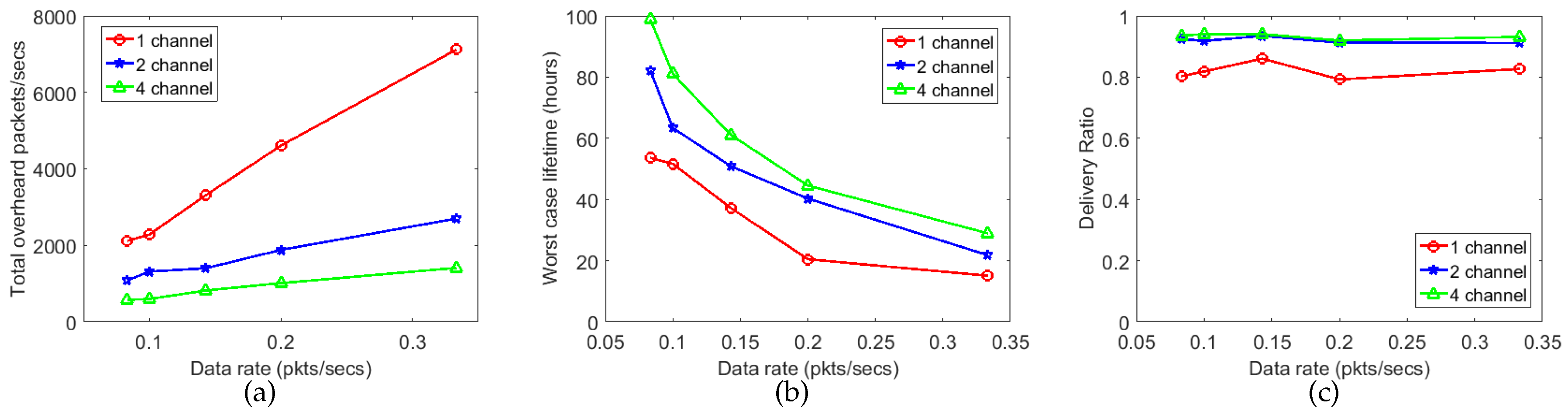
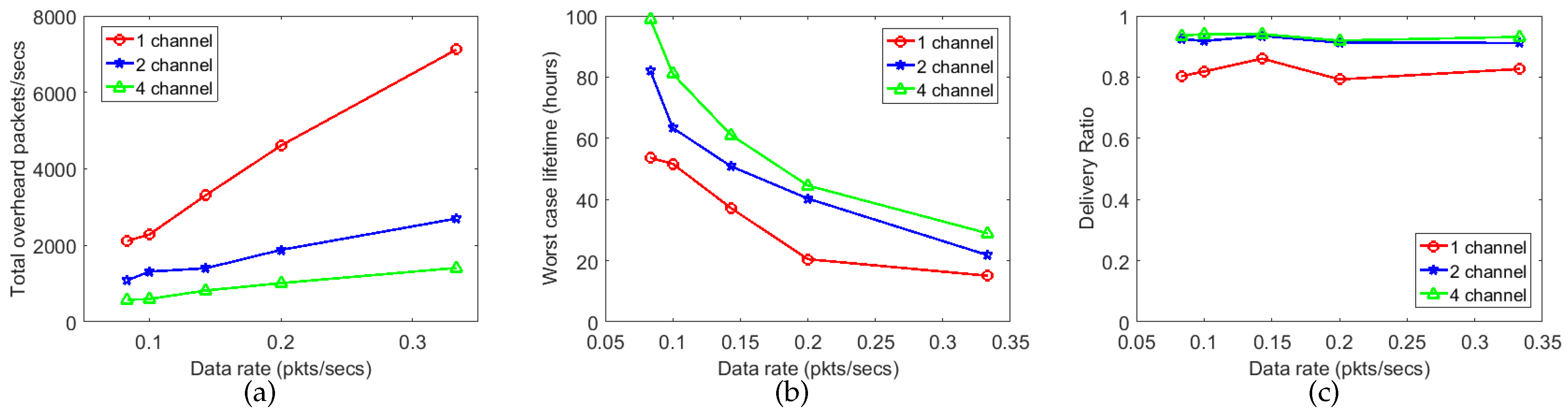
Comparison with different datarate: Figure 11 shows the variation of the packet delivery ratios, overhearing counts and the
worst case network lifetime with different number of channels and transmission rates. The worst case network lifetime is defined as the time when the first node of the network dies. We distribute 200 nodes for these set of figures. It is observed that the packet delivery ratio is above 80% for all cases. This is consistent with the findings from the experimental testbed, indicating that at these data rates, the packet delivery ratio is not significantly affected by the channel switching scheme employed in DRCS. However, overhearing is reduced by nearly 60% with 2 channels and by almost 80% with 4 channels. This significantly reduces the average current consumption in the nodes and improves the network lifetime as seen from
Figure 11b.
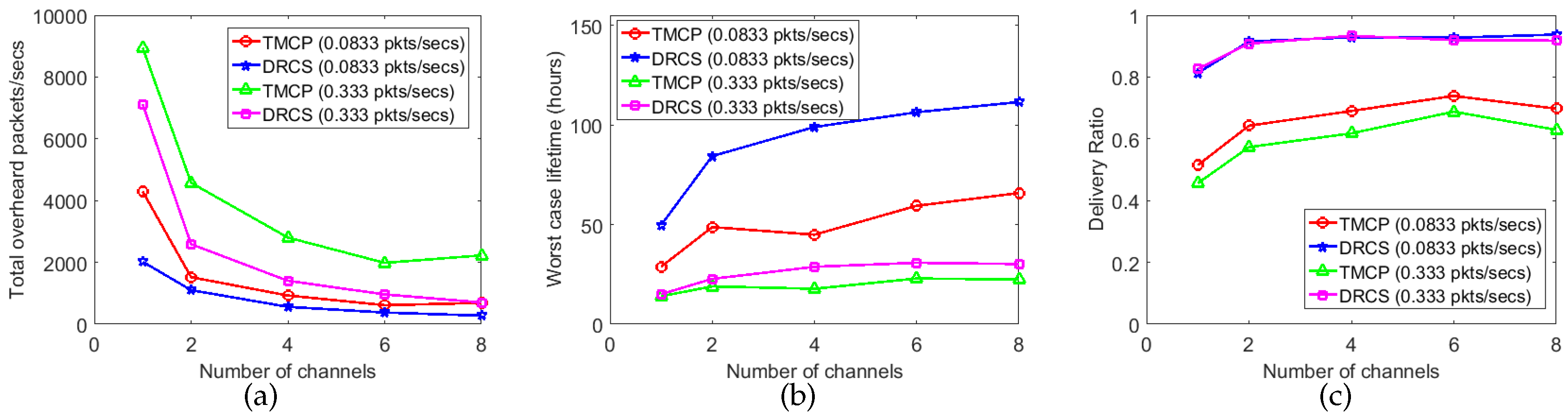
Comparison with TMCP [35]: Figure 12 shows the comparison of DRCS with another well-known channel assignment scheme TMCP with different number of channels. Here, we assume a communication range of 40 m and an interference range that is 1.5 times of the communication range. Several observation can be made from the comparative results presented in
Figure 12. It must be noted that DRCS generates a higher packet delivery ratio in comparison to TMCP. At the same time the overhearing is reduced by almost 50% which doubles the network lifetime as obtained from
Figure 12a,b. This is due to several reasons. Firstly, TMCP uses a distance-based communication and interference model that does not effectively capture the link qualities, especially with a high channel variance. Secondly, DRCS uses channels more efficiently than TMCP. In TMCP, nodes select the same channels as that of their parents. Hence, if the sink has
n immediate neighbors and there are
k channels where
, then at least
channels will be unused, since there will be at most
n sub-trees in the network. On the other hand, nodes on the same sub-tree in DRCS may use multiple channels, thereby improving channel utilization. Also in case of TMCP, the parent and channel assignments are static. These do not change even with variations of congestion and link quality. These result in poor route quality that leads to higher packet loss, retransmissions, and overhearing. Moreover, the channel quality may vary over time, which requires a dynamic protocol. It is also observed that the benefits of multiple channels drops with increasing number of channels and is not significant beyond 6 channels.
It must be noted that overhearing increases with increasing number of neighbors, which happens due to higher node density. To evaluate the effect of node density on DRCS, we evaluate the performance of DRCS by varying the number of sensor nodes from 50 to 250. Figure (a) shows that the overhearing increases by ∼40-95 times while the number of sensor nodes increases from 50 to 250. This is because of the higher network density, which results in significant increase in overhearing. This reduces the network lifetime by ∼5 times as obtained from Figure (b).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}