


Edge Computing and Its Application in Robotics: A Survey


Abstract
1. Introduction
1.1. Applications of Edge Computing in Robotics
1.2. Survey Scope
- A classification of the diverse computing paradigms relevant to edge robotics;
- A survey of the current landscape and core aspects of edge robotics;
- An identification and discussion of key research challenges and future directions.
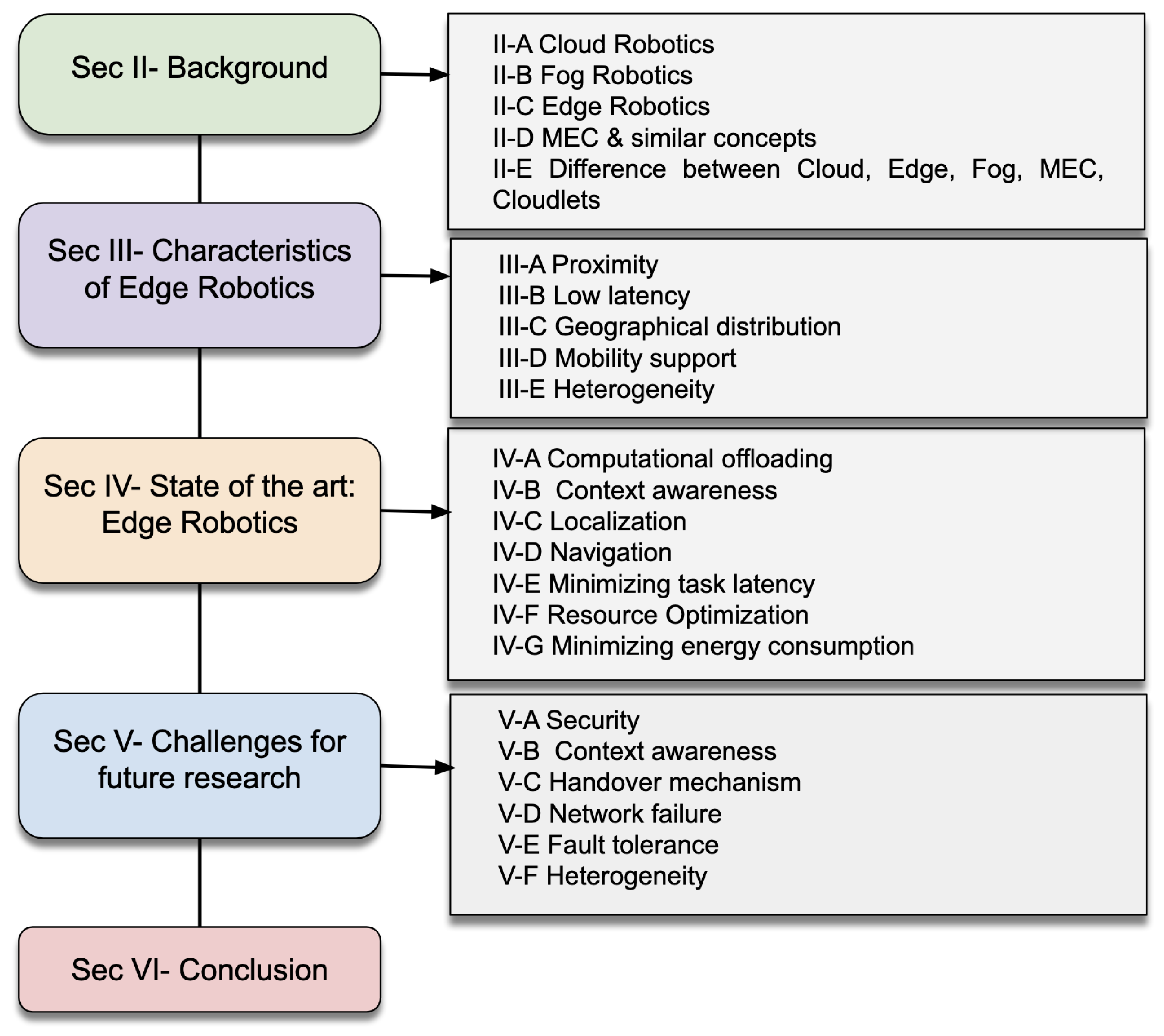
1.3. Article Organization
2. Background
2.1. Cloud Robotics
2.2. Fog Robotics
2.3. Edge Robotics
2.4. MEC and Similar Concepts
2.5. Difference Between Cloud, Edge, Fog, MEC, Cloudlets
3. Key Characteristics of Edge Robotics
3.1. Proximity
3.2. Low Latency
3.3. Geographical Distribution
3.4. Mobility Support
3.5. Heterogeneity
4. State of the Art: Edge Robotics
4.1. Computational Offloading
4.2. Context Awareness
4.3. Localization
4.4. Navigation
4.5. Minimizing Task Latency
4.6. Resource Optimization
4.7. Minimizing Energy Consumption
5. Research Gaps and Limitations
6. Challenges for Future Research
6.1. Security
6.2. Context Awareness
6.3. Handover Mechanism
6.4. Network Failure
6.5. Fault Tolerance
6.6. Heterogeneity
7. Conclusions
Funding
Conflicts of Interest
Abbreviations
| Acronym | Description |
| ETSI | European Telecommunications Standards Institute |
| MEC | Mobile Edge Computing |
| CPS | Cyber–Physical Systems |
| SLAM | Simultaneous Localization and Mapping |
| AWS | Amazon Web Services |
| ROS | Robot Operating System |
| MRS | Multi-Robot Systems |
| RAN | Radio Access Network |
| FCN | Fog Computing Nodes |
| OS | Operating System |
| VM | Virtual Machines |
| GPU | Graphics Processing Unit |
| NPU | Neural Network Processor Unit |
| FGPA | Field Programmable Gate Array |
| TPU | Tensor Processing Unit |
| APU | Accelerated Processing Unit |
| UAV | Unmanned Aerial Vehicle |
| LSTM | Long Short-Term Memory |
| MRS | Multi-Robot System |
References
- Sun, X.; Ansari, N. EdgeIoT: Mobile edge computing for the Internet of Things. IEEE Commun. Mag. 2016, 54, 22–29. [Google Scholar] [CrossRef]
- Alrawais, A.; Alhothaily, A.; Hu, C.; Cheng, X. Fog computing for the internet of things: Security and privacy issues. IEEE Internet Comput. 2017, 21, 34–42. [Google Scholar] [CrossRef]
- Hassan, N.; Gillani, S.; Ahmed, E.; Yaqoob, I.; Imran, M. The role of edge computing in internet of things. IEEE Commun. Mag. 2018, 56, 110–115. [Google Scholar] [CrossRef]
- Khan, W.Z.; Ahmed, E.; Hakak, S.; Yaqoob, I.; Ahmed, A. Edge computing: A survey. Future Gener. Comput. Syst. 2019, 97, 219–235. [Google Scholar] [CrossRef]
- Zhao, Z.; Liu, F.; Cai, Z.; Xiao, N. Edge computing: Platforms, applications and challenges. J. Comput. Res. Dev. 2018, 55, 327–337. [Google Scholar]
- Maskeliūnas, R.; Damaševičius, R.; Segal, S. A review of internet of things technologies for ambient assisted living environments. Future Internet 2019, 11, 259. [Google Scholar] [CrossRef]
- Cao, K.; Liu, Y.; Meng, G.; Sun, Q. An overview on edge computing research. IEEE Access 2020, 8, 85714–85728. [Google Scholar] [CrossRef]
- Chen, G.; Kang, B.T.; Kandemir, M.; Vijaykrishnan, N.; Irwin, M.J.; Chandramouli, R. Studying energy trade offs in offloading computation/compilation in java-enabled mobile devices. IEEE Trans. Parallel Distrib. Syst. 2004, 15, 795–809. [Google Scholar] [CrossRef]
- Spatharakis, D.; Avgeris, M.; Athanasopoulos, N.; Dechouniotis, D.; Papavassiliou, S. Resource-aware estimation and control for edge robotics: A set-based approach. IEEE Internet Things J. 2022, 10, 2003–2020. [Google Scholar] [CrossRef]
- Tahir, N.; Parasuraman, R. Analog twin framework for human and ai supervisory control and teleoperation of robots. IEEE Trans. Syst. Man Cybern. Syst. 2022, 53, 2616–2628. [Google Scholar] [CrossRef]
- Hu, G.; Tay, W.P.; Wen, Y. Cloud robotics: Architecture, challenges and applications. IEEE Netw. 2012, 26, 21–28. [Google Scholar] [CrossRef]
- Wan, J.; Tang, S.; Yan, H.; Li, D.; Wang, S.; Vasilakos, A.V. Cloud robotics: Current status and open issues. IEEE Access 2016, 4, 2797–2807. [Google Scholar] [CrossRef]
- Rahman, A.; Jin, J.; Rahman, A.; Cricenti, A.; Afrin, M.; Dong, Y.n. Energy-efficient optimal task offloading in cloud networked multi-robot systems. Comput. Netw. 2019, 160, 11–32. [Google Scholar] [CrossRef]
- Afrin, M.; Jin, J.; Rahman, A.; Rahman, A.; Wan, J.; Hossain, E. Resource allocation and service provisioning in multi-agent cloud robotics: A comprehensive survey. IEEE Commun. Surv. Tutor. 2021, 23, 842–870. [Google Scholar] [CrossRef]
- Groshev, M.; Baldoni, G.; Cominardi, L.; de la Oliva, A.; Gazda, R. Edge robotics: Are we ready? An experimental evaluation of current vision and future directions. Digit. Commun. Netw. 2023, 9, 166–174. [Google Scholar] [CrossRef]
- Haidegger, T.; Galambos, P.; Rudas, I.J. Robotics 4.0–Are we there yet? In Proceedings of the 2019 IEEE 23rd International Conference on Intelligent Engineering Systems (INES), Gödöllő, Hungary, 25–27 April 2019; pp. 000117–000124. [Google Scholar]
- Ayranci, A.A.; Erkmen, B. Edge computing and robotic applications in modern agriculture. In Proceedings of the 2024 International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Istanbul, Turkiye, 23–25 May 2024; pp. 1–6. [Google Scholar]
- Sharma, M.; Tomar, A.; Hazra, A. Edge computing for industry 5.0: Fundamental, applications, and research challenges. IEEE Internet Things J. 2024, 11, 19070–19093. [Google Scholar] [CrossRef]
- Wan, S.; Gu, Z.; Ni, Q. Cognitive computing and wireless communications on the edge for healthcare service robots. Comput. Commun. 2020, 149, 99–106. [Google Scholar] [CrossRef]
- Kuffner, J. Cloud-Enabled Robots in: IEEE-Ras International Conference on Humanoid Robots; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Kehoe, B.; Patil, S.; Abbeel, P.; Goldberg, K. A survey of research on cloud robotics and automation. IEEE Trans. Autom. Sci. Eng. 2015, 12, 398–409. [Google Scholar] [CrossRef]
- Arumugam, R.; Enti, V.R.; Bingbing, L.; Xiaojun, W.; Baskaran, K.; Kong, F.F.; Kumar, A.S.; Meng, K.D.; Kit, G.W. DAvinCi: A cloud computing framework for service robots. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 3084–3089. [Google Scholar]
- Montemerlo, M.; Thrun, S. FastSLAM 1.0. FastSLAM: A Scalable Method for the Simultaneous Localization and Mapping Problem in Robotics; Springer: Berlin/Heidelberg, Germany, 2007; pp. 27–62. [Google Scholar]
- Mohanarajah, G.; Hunziker, D.; D’Andrea, R.; Waibel, M. Rapyuta: A cloud robotics platform. IEEE Trans. Autom. Sci. Eng. 2014, 12, 481–493. [Google Scholar] [CrossRef]
- Riazuelo, L.; Civera, J.; Montiel, J.M. C2tam: A cloud framework for cooperative tracking and mapping. Robot. Auton. Syst. 2014, 62, 401–413. [Google Scholar] [CrossRef]
- Sartoni, M. AWS Services for Cloud Robotics Applications. Ph.D. Thesis, Politecnico di Torino, Turin, Italy, 2022. [Google Scholar]
- Saha, O.; Dasgupta, P. A comprehensive survey of recent trends in cloud robotics architectures and applications. Robotics 2018, 7, 47. [Google Scholar] [CrossRef]
- Bonomi, F.; Milito, R.; Zhu, J.; Addepalli, S. Fog computing and its role in the internet of things. In Proceedings of the First Edition of the MCC Workshop on Mobile Cloud Computing, Helsinki, Finland, 17 August 2012; pp. 13–16. [Google Scholar]
- Gudi, S.C.; Ojha, S.; Clark, J.; Johnston, B.; Williams, M.-A. Fog robotics: An introduction. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I. Fog-Enabled Multi-Robot Systems. In Proceedings of the 2018 IEEE 2nd International Conference on Fog and Edge Computing (ICFEC), Washington, DC, USA, 1–3 May 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Galambos, P. Cloud, fog, and mist computing: Advanced robot applications. IEEE Syst. Man Cybern. Mag. 2020, 6, 41–45. [Google Scholar] [CrossRef]
- Hu, Y.C.; Patel, M.; Sabella, D.; Sprecher, N.; Young, V. Mobile edge computing—A key technology towards 5G. ETSI White Pap. 2015, 11, 1–16. [Google Scholar]
- Giust, F.; Verin, G.; Antevski, K.; Chou, J.; Fang, Y.; Featherstone, W.; Fontes, F.; Frydman, D.; Li, A.; Manzalini, A.; et al. MEC deployments in 4G and evolution towards 5G. ETSI White Pap. 2018, 24, 1–24. [Google Scholar]
- Wang, F.; Zhang, M.; Wang, X.; Ma, X.; Liu, J. Deep learning for edge computing applications: A state-of-the-art survey. IEEE Access 2020, 8, 58322–58336. [Google Scholar] [CrossRef]
- Afrin, M.; Jin, J.; Rahman, A. Energy-delay co-optimization of resource allocation for robotic services in cloudlet infrastructure. In Proceedings of the International Conference on Service-Oriented Computing, Hangzhou, China, 12–15 November 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 295–303. [Google Scholar]
- Taleb, T.; Samdanis, K.; Mada, B.; Flinck, H.; Dutta, S.; Sabella, D. On multi-access edge computing: A survey of the emerging 5g network edge cloud architecture and orchestration. IEEE Commun. Surv. Tutor. 2017, 19, 1657–1681. [Google Scholar] [CrossRef]
- IEEE P1934/D1.0; IEEE Draft Standard for Adoption of Openfog Reference Architecture for Fog Computing. IEEE: Piscataway, NJ, USA, February 2018; pp. 1–170.
- Pujol, V.C.; Dustdar, S. Fog robotics—Understanding the research challenges. IEEE Internet Comput. 2021, 25, 10–17. [Google Scholar] [CrossRef]
- Gudi, S.L.K.C.; Johnston, B.; Williams, M.-A. Fog robotics: A summary, challenges and future scope. arXiv 2019, arXiv:1908.04935. [Google Scholar] [CrossRef]
- Song, D.; Tanwani, A.K.; Goldberg, K. Networked, cloud and fog robotics. In Robotics Goes MOOC: Interaction; Springer: Berlin/Heidelberg, Germany, 2025; pp. 271–313. [Google Scholar]
- Zuo, Q.; Tao, D.; Qi, T.; Xie, J.; Zhou, Z.; Tian, Z.; Mingyu, Y. Industrial internet robot collaboration system and edge computing optimization. arXiv 2025, arXiv:2504.02492. [Google Scholar] [CrossRef]
- Ren, J.; Zhang, D.; He, S.; Zhang, Y.; Li, T. A survey on end-edge-cloud orchestrated network computing paradigms: Transparent computing, mobile edge computing, fog computing, and cloudlet. ACM Comput. Surv. (CSUR) 2019, 52, 1–36. [Google Scholar] [CrossRef]
- Dey, S.; Mukherjee, A. Robotic slam: A review from fog computing and mobile edge computing perspective. In Proceedings of the Adjunct 13th International Conference on Mobile and Ubiquitous Systems: Computing Networking and Services, Hiroshima, Japan, 28 November–1 December 2016; pp. 153–158. [Google Scholar]
- Dechouniotis, D.; Spatharakis, D.; Papavassiliou, S. Edge Robotics Experimentation over Next Generation IIoT Testbeds. In Proceedings of the NOMS 2022—2022 IEEE/IFIP Network Operations and Management Symposium, Budapest, Hungary, 25–29 April 2022; pp. 1–3. [Google Scholar]
- Li, W.; Fan, Y.; Jiang, A.; Liu, Z.; Pan, A.; Wei, B. Intelligent control method of live working robot based on cloud and edge computing terminal. In Proceedings of the 2020 10th IEEE International Conference on Power and Energy Systems (ICPES), Chengdu, China, 25–27 December 2020; pp. 321–325. [Google Scholar]
- Wang, H. Collaborative task offloading strategy of UAV cluster using improved genetic algorithm in mobile edge computing. J. Robot. 2021, 2021, 3965689. [Google Scholar] [CrossRef]
- Tahir, N.; Parasuraman, R. Utility ai for dynamic task offloading in the multi-edge infrastructure. In Proceedings of the 2023 Seventh IEEE International Conference on Robotic Computing (IRC), Laguna Hills, CA, USA, 11–13 December 2023; pp. 331–338. [Google Scholar]
- Tahir, N.; Parasuraman, R. Consensus-based resource scheduling for collaborative multi-robot tasks. In Proceedings of the 2023 Seventh IEEE International Conference on Robotic Computing (IRC), Laguna Hills, CA, USA, 11–13 December 2023; pp. 323–330. [Google Scholar]
- Baruffa, G.; Detti, A.; Rugini, L.; Crocetti, F.; Banelli, P.; Costante, G.; Valigi, P. Ai-driven ground robots: Mobile edge computing and mmwave communications at work. IEEE Open J. Commun. Soc. 2024, 5, 3104–3119. [Google Scholar] [CrossRef]
- Klaas, T.; Lambrecht, J.; Funk, E. Semantic Local Planning for Mobile Robots through Path Optimization Services on the Edge: A Scenario-based Evaluation. In Proceedings of the 2020 25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vienna, Austria, 8–11 September 2020; pp. 711–718. [Google Scholar]
- Lambrecht, J.; Funk, E. Edge-Enabled Autonomous Navigation and Computer Vision as a Service: A Study on Mobile Robot’s Onboard Energy Consumption and Computing Requirements. In Proceedings of the ROBOT, Porto, Portugal, 20–22 November 2019. [Google Scholar]
- Antevski, K. Enhancing Edge robotics through the use of context information. In Proceedings of the Workshop on Experimentation and Measurements in 5G, Heraklion, Greece, 4 December 2018; pp. 7–12. [Google Scholar]
- Groshev, M.; Martín-Pérez, J.; Antevski, K.; De La Oliva, A.; Bernardos, C.J. COTORRA: Context-Aware testbed for robotic applications. In Proceedings of the MobileServerless 2021, 2021 1st Workshop on Serverless Mobile Networking for 6G Communications, Virtual, 25 June 2021; pp. 7–12. [Google Scholar] [CrossRef]
- Zeng, Q.; Wang, Z.; Zhou, Y.; Wu, H.; Yang, L.; Huang, K. Knowledge-based ultra-low-latency semantic communications for robotic edge intelligence. IEEE Trans. Commun. 2024; early access. [Google Scholar]
- Thong Tran, T.; Zhang, Y.C.; Liao, W.T.; Lin, Y.J.; Li, M.C.; Huang, H.S. An autonomous mobile robot system based on serverless computing and edge computing. In Proceedings of the APNOMS 2020—2020 21st Asia-Pacific Network Operations and Management Symposium: Towards Service and Networking Intelligence for Humanity, Daegu, Republic of Korea, 22–25 September 2020; pp. 334–337. [Google Scholar] [CrossRef]
- Huang, P.; Zeng, L.; Luo, K.; Guo, J.; Zhou, Z.; Chen, X. ColaSLAM: Real-time multi-robot collaborative laser SLAM via edge computing. In Proceedings of the IEEE/CIC International Conference on Communications in China, ICCC 2021, Xiamen, China, 28–30 July 2021; pp. 242–247. [Google Scholar] [CrossRef]
- Huang, P.; Zeng, L.; Chen, X.; Luo, K.; Zhou, Z.; Yu, S. Edge robotics: Edge-computing-accelerated multirobot simultaneous localization and mapping. IEEE Internet Things J. 2022, 9, 14087–14102. [Google Scholar] [CrossRef]
- Liu, X.; Wen, S.; Zhao, J.; Qiu, T.Z.; Zhang, H. Edge-assisted multi-robot visual-inertial slam with efficient communication. IEEE Trans. Autom. Sci. Eng. 2025, 22, 2186–2198. [Google Scholar] [CrossRef]
- Sarker, V.K.; Pe, J. Offloading SLAM for Indoor Mobile Robots with Edge-Fog-Cloud Computing. In Proceedings of the 2019 1st International Conference on Advances in Science, Engineering and Robotics Technology (ICASERT), Dhaka, Bangladesh, 3–5 May 2019. [Google Scholar]
- Cui, X.; Lu, C.; Wang, J. 3D Semantic Map Construction Using Improved ORB-SLAM2 for Mobile Robot in Edge Computing Environment. IEEE Access 2020, 8, 67179–67191. [Google Scholar] [CrossRef]
- Ben Ali, A.J.; Kouroshli, M.; Semenova, S.; Hashemifar, Z.S.; Ko, S.Y.; Dantu, K. Edge-slam: Edge-assisted visual simultaneous localization and mapping. ACM Trans. Embed. Comput. Syst. 2022, 22, 18. [Google Scholar] [CrossRef]
- Chen, Q.; Zhu, H.; Yang, L.; Chen, X.; Pollin, S.; Vinogradov, E. Edge computing assisted autonomous flight for UAV: Synergies between vision and communications. IEEE Commun. Mag. 2021, 59, 28–33. [Google Scholar] [CrossRef]
- Palani, U.; Engineering, C.; Sadhana, R.; Engineering, C.; Mahesh, S.S.; Analyst, P.; Vasanthi, D.; Engineering, C. Edge Computing Based Autonomous Robot for Secured Industrial IoT. In Proceedings of the 2022 IEEE International Conference on Data Science and Information System (ICDSIS), Hassan, India, 29–30 July 2022. [Google Scholar]
- Fan, Z.; Chen, W.; Zhu, G.; You, Y.; Deng, F.; Hou, Y.; Liang, W.; Fu, R.; Xin, J.; Chen, J.; et al. Collaborative Robot Transport System Based on Edge Computing. In Proceedings of the 9th IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, CYBER 2019, Suzhou, China, 29 July–2 August 2019; pp. 1320–1326. [Google Scholar] [CrossRef]
- Li, J.; Yin, J.; Deng, L. A robot vision navigation method using deep learning in edge computing environment. Eurasip J. Adv. Signal Process. 2021, 2021, 22. [Google Scholar] [CrossRef]
- Qingqing, L.; Queralta, J.P.; Gia, T.N.; Westerlund, T. Offloading monocular visual odometry with edge computing: Optimizing image quality in multi-robot systems. In Proceedings of the 2019 5th International Conference on Systems, Control and Communications, Wuhan, China, 21–23 December 2019; pp. 22–26. [Google Scholar] [CrossRef]
- Hayat, S.; Jung, R.; Hellwagner, H.; Bettstetter, C.; Emini, D.; Schnieders, D. Edge Computing in 5G for Drone Navigation: What to Offload? IEEE Robot. Autom. Lett. 2021, 6, 2571–2578. [Google Scholar] [CrossRef]
- Li, G.; Han, R.; Wang, S.; Gao, F.; Eldar, Y.C.; Xu, C. Edge accelerated robot navigation with collaborative motion planning. IEEE/ASME Trans. Mechatron. 2024, 30, 1166–1178. [Google Scholar] [CrossRef]
- Asavasirikulkij, C.; Mathong, C.; Sinthumongkolchai, T.; Chancharoen, R.; Asdomwised, W. Low Latency Peer to Peer Robot Wireless Communication with Edge Computing. In Proceedings of the 2021 IEEE 11th International Conference on System Engineering and Technology, ICSET 2021, Shah Alam, Malaysia, 6 November 2021; pp. 100–105. [Google Scholar] [CrossRef]
- Yin, R.; Shen, Y.; Zhu, H.; Chen, X.; Wu, C. Time-critical tasks implementation in MEC based multi-robot cooperation systems. China Commun. 2022, 19, 199–215. [Google Scholar] [CrossRef]
- Tahir, N.; Parasuraman, R.; Sun, H. Communication-aware consistent edge selection for mobile users and autonomous vehicles. In Proceedings of the 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), Washington, DC, USA, 7–10 October 2024; pp. 1–7. [Google Scholar]
- Chen, K.; Wang, M.; Gualtieri, M.; Tian, N.; Juette, C.; Ren, L.; Ichnowski, J.; Kubiatowicz, J.; Goldberg, K. Fogros2-ls: A location-independent fog robotics framework for latency sensitive ros2 applications. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13–17 May 2024; pp. 10581–10587. [Google Scholar]
- Qingqing, L.; Yuhong, F.; Pe, J. Edge Computing for Mobile Robots: Multi-Robot Feature-Based Lidar Odometry with FPGAs. In Proceedings of the 2019 Twelfth International Conference on Mobile Computing and Ubiquitous Network (ICMU), Kathmandu, Nepal, 4–6 November 2019; pp. 4–5. [Google Scholar]
- Huang, X.; Yu, R.; Ye, D.; Shu, L.; Xie, S. Efficient Workload Allocation and User-Centric Utility Maximization for Task Scheduling in Collaborative Vehicular Edge Computing. IEEE Trans. Veh. Technol. 2021, 70, 3773–3787. [Google Scholar] [CrossRef]
- Bouhoula, S.; Avgeris, M.; Leivadeas, A.; Lambadaris, I. Drl-based trajectory planning and sensor task scheduling for edge robotics. In Proceedings of the 2024 IEEE 10th World Forum on Internet of Things (WF-IoT), Ottawa, ON, Canada, 10–13 November 2024; pp. 352–357. [Google Scholar]
- Wang, X.; Guo, H. Mobility-Aware Computation Offloading for Swarm Robotics using Deep Reinforcement Learning. In Proceedings of the 2021 IEEE 18th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Farahbakhsh, F.; Shahidinejad, A.; Ghobaei-Arani, M. Multiuser context-aware computation offloading in mobile edge computing based on Bayesian learning automata. Trans. Emerg. Telecommun. Technol. 2021, 32, e4127. [Google Scholar] [CrossRef]
- Zeng, L.; Ye, S.; Chen, X.; Yang, Y. Implementation of big ai models for wireless networks with collaborative edge computing. IEEE Wirel. Commun. 2024, 31, 50–58. [Google Scholar] [CrossRef]
- Jahan, F.; Sun, W.; Niyaz, Q.; Alam, M. Security Modeling of Autonomous Systems: A Survey. ACM Comput. Surv. 2019, 52, 91. [Google Scholar] [CrossRef]
- Ghosh, S.; Patro, R.; Raina, M.; Thejaswi, C.; Ganapathy, V. Secure group communication in wireless sensor networks. In Proceedings of the 2006 1st International Symposium on Wireless Pervasive Computing, Phuket, Thailand, 16–18 January 2006; p. 5. [Google Scholar] [CrossRef]
- Chaâri, R.; Cheikhrouhou, O.; Koubâa, A.; Youssef, H. Dynamic computation offloading for ground and flying robots: Taxonomy, state of art, and future directions. Comput. Sci. Rev. 2022, 45, 100488. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
| Aspect | Fog Robotics | Edge Robotics |
|---|---|---|
| Scope | Broader, covers intermediate layers between cloud and robots (e.g., gateways, local servers) | Narrower, focused on computing at or near the robot or sensor |
| Location | Distributed across network nodes between cloud and robots | Located directly at or on the robots or edge devices |
| Control and Coordination | Managed across multiple network nodes, e.g., warehouses or local hubs | Mostly local control near the robot or sensor |
| Latency and Bandwidth | Reduces latency and bandwidth usage by intermediate processing | Minimizes latency by ultra-local processing near the robot |
| Example Use Case | Warehouse robots coordinating via local servers with occasional cloud access [40] | Robots processing sensor data on nearby embedded devices for real-time tasks [41] |
| Administrative Domain | Can span multiple trusted domains with policies on data flow | Typically operates within a single domain such as a smart home or manufacturer |
| Reference | Computational Offloading | Context Awareness | Localization | Navigation | Minimizing Latency | Resource Optimization | Minimizing Energy Consumption |
|---|---|---|---|---|---|---|---|
| S. Dey et al. [43] | ✓ | ✗ | ✓ | ✗ | ✓ | ✗ | ✓ |
| D. Dechouniotis et al. [44] | ✓ | ✗ | ✓ | ✓ | ✓ | ✓ | ✗ |
| W. Li et al. [45] | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ |
| H. Wang [46] | ✓ | ✗ | ✗ | ✗ | ✓ | ✓ | ✓ |
| N. Tahir et al. [47,48] | ✓ | ✗ | ✓ | ✓ | ✓ | ✓ | ✗ |
| Baruffa et al. [49] | ✓ | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ |
| T. Klaas et al. [50] | ✓ | ✓ | ✗ | ✓ | ✗ | ✗ | ✗ |
| J. Lambrecht et al. [51] | ✓ | ✓ | ✗ | ✓ | ✗ | ✗ | ✓ |
| K. Antevski et al. [52] | ✗ | ✓ | ✗ | ✓ | ✓ | ✗ | ✗ |
| M. Groshev et al. [53] | ✓ | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| Q. Zeng et al. [54] | ✓ | ✓ | ✗ | ✗ | ✓ | ✓ | ✗ |
| T. Thong Tran et al. [55] | ✓ | ✗ | ✓ | ✓ | ✓ | ✗ | ✓ |
| P. Huang et al. [56,57] | ✓ | ✗ | ✓ | ✗ | ✓ | ✓ | ✗ |
| Lui et al. [58] | ✓ | ✗ | ✓ | ✗ | ✓ | ✓ | ✗ |
| V. Sarkar et al. [59] | ✓ | ✗ | ✓ | ✗ | ✓ | ✓ | ✓ |
| X. Cui et al. [60] | ✗ | ✗ | ✓ | ✗ | ✗ | ✗ | ✗ |
| A. Ben Ali et al. [61] | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ | ✗ |
| Q. Chen et al. [62] | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ | ✗ |
| U. Palani et al. [63] | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ |
| Z. Fan et al. [64] | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ | ✗ |
| J. Li et al. [65] | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ | ✗ |
| L. Qingqing et al. [66] | ✓ | ✗ | ✓ | ✓ | ✓ | ✗ | ✗ |
| S. Hayat et al. [67] | ✓ | ✗ | ✓ | ✓ | ✓ | ✗ | ✓ |
| G. Li et al. [68] | ✓ | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ |
| C. Asavasirikulkij et al. [69] | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ | ✓ |
| R. Yin et al. [70] | ✓ | ✗ | ✗ | ✗ | ✓ | ✓ | ✓ |
| N. Tahir et al. [71] | ✓ | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ |
| K. Chen et al. [72] | ✓ | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ |
| L. Qingqing et al. [73] | ✓ | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ |
| D. Spatharakis et al. [9] | ✓ | ✗ | ✓ | ✓ | ✓ | ✓ | ✗ |
| X. Huang et al. [74] | ✓ | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| S. Bouhoula et al. [75] | ✓ | ✗ | ✗ | ✗ | ✓ | ✓ | ✓ |
| Wang et al. [76] | ✓ | ✗ | ✗ | ✗ | ✓ | ✗ | ✓ |
| F. Farahbaksh et al. [77] | ✓ | ✓ | ✗ | ✗ | ✓ | ✗ | ✓ |
| Zeng et al. [78] | ✓ | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tahir, N.; Parasuraman, R. Edge Computing and Its Application in Robotics: A Survey. J. Sens. Actuator Netw. 2025, 14, 65. https://doi.org/10.3390/jsan14040065
Tahir N, Parasuraman R. Edge Computing and Its Application in Robotics: A Survey. Journal of Sensor and Actuator Networks. 2025; 14(4):65. https://doi.org/10.3390/jsan14040065
Chicago/Turabian StyleTahir, Nazish, and Ramviyas Parasuraman. 2025. "Edge Computing and Its Application in Robotics: A Survey" Journal of Sensor and Actuator Networks 14, no. 4: 65. https://doi.org/10.3390/jsan14040065
APA StyleTahir, N., & Parasuraman, R. (2025). Edge Computing and Its Application in Robotics: A Survey. Journal of Sensor and Actuator Networks, 14(4), 65. https://doi.org/10.3390/jsan14040065