
EWOD Sensor for Rapid Quantification of Marine Dispersants in Oil Spill Management



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
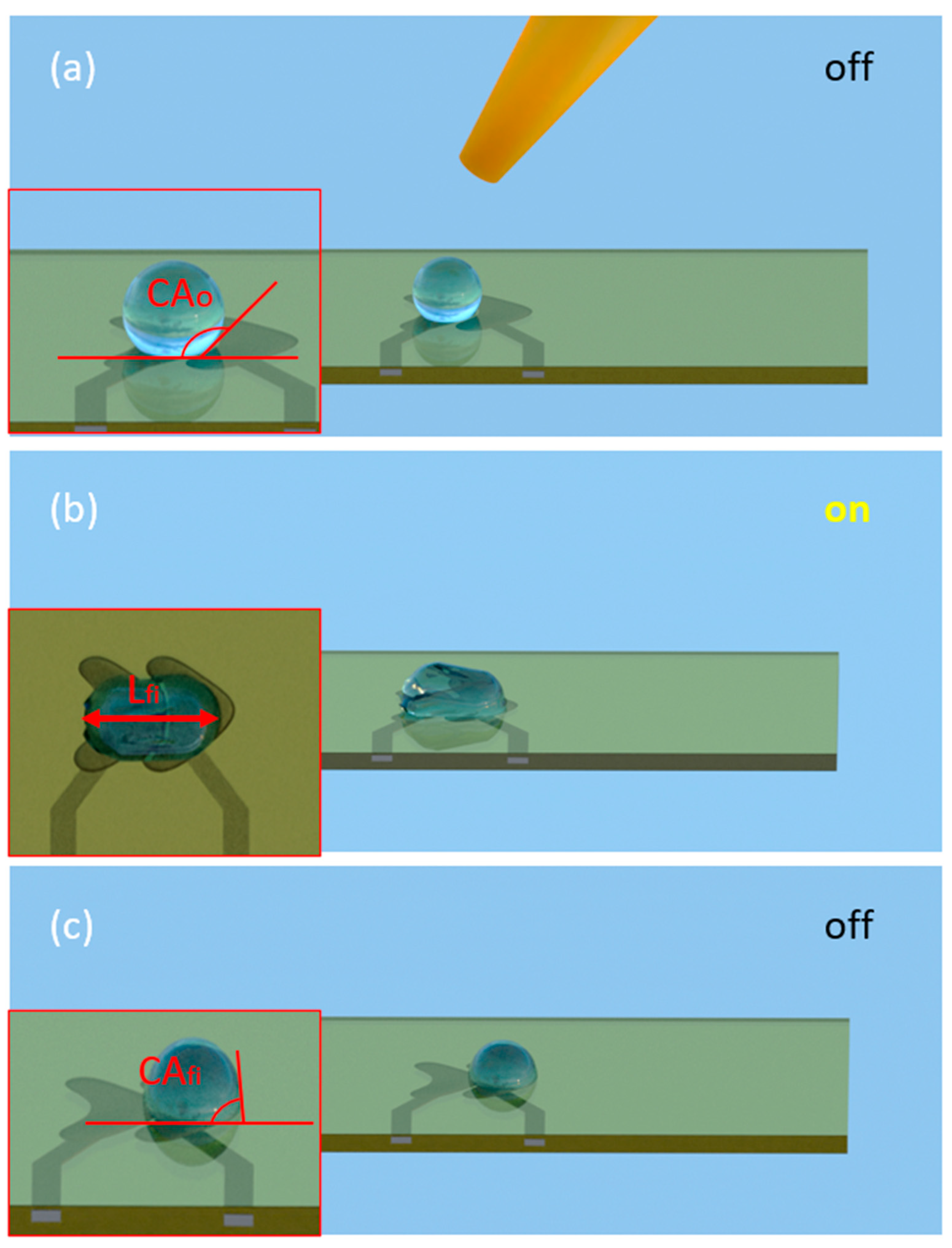
2.1. Sensor Principle
2.2. Capillary Regime Validation
2.3. Device Manufacturing Method
2.4. Preparation of Surfactant Solutions and Tensiometer
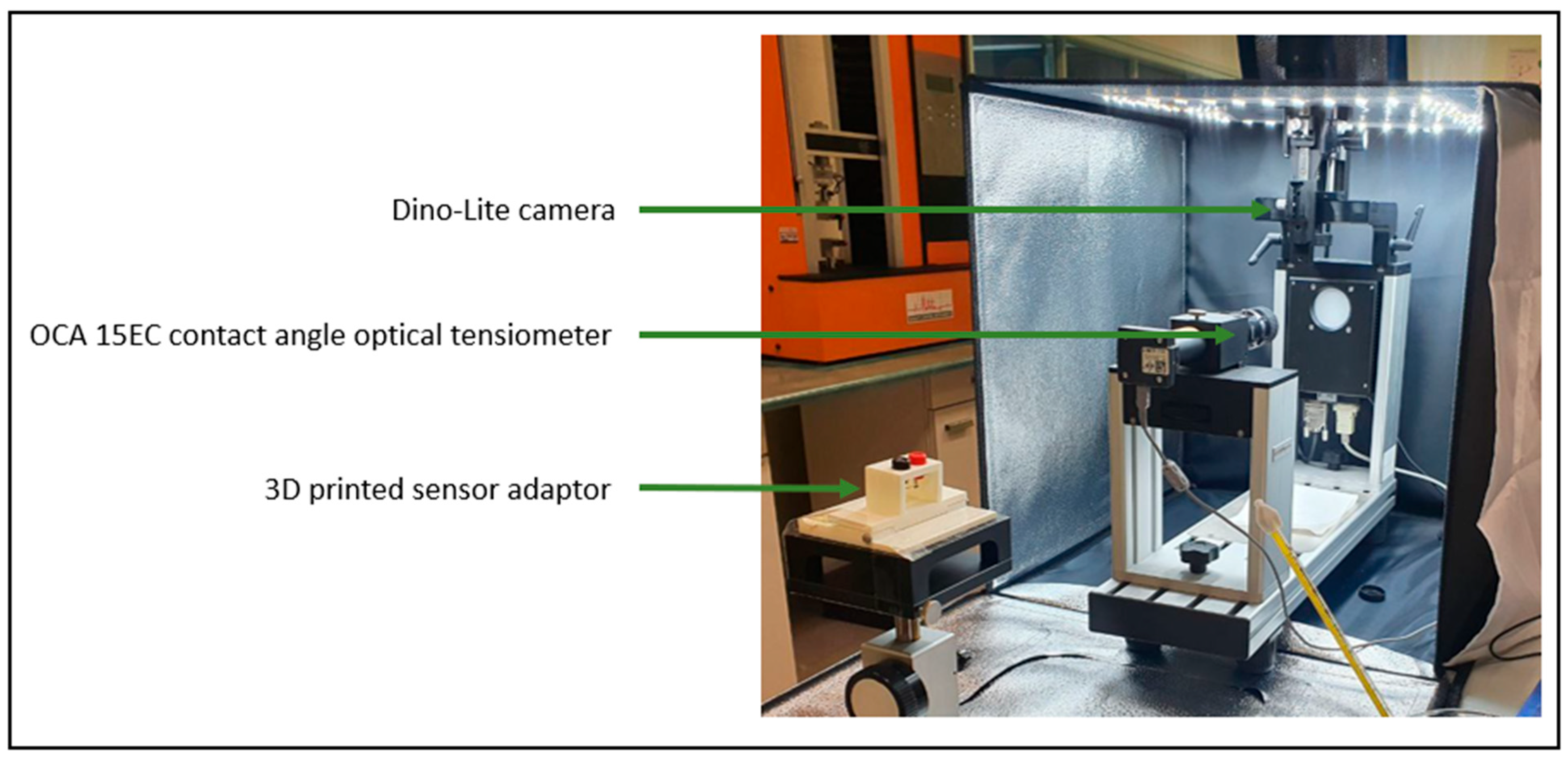
2.5. Experimental Setup
2.6. Electrostatic Simulation
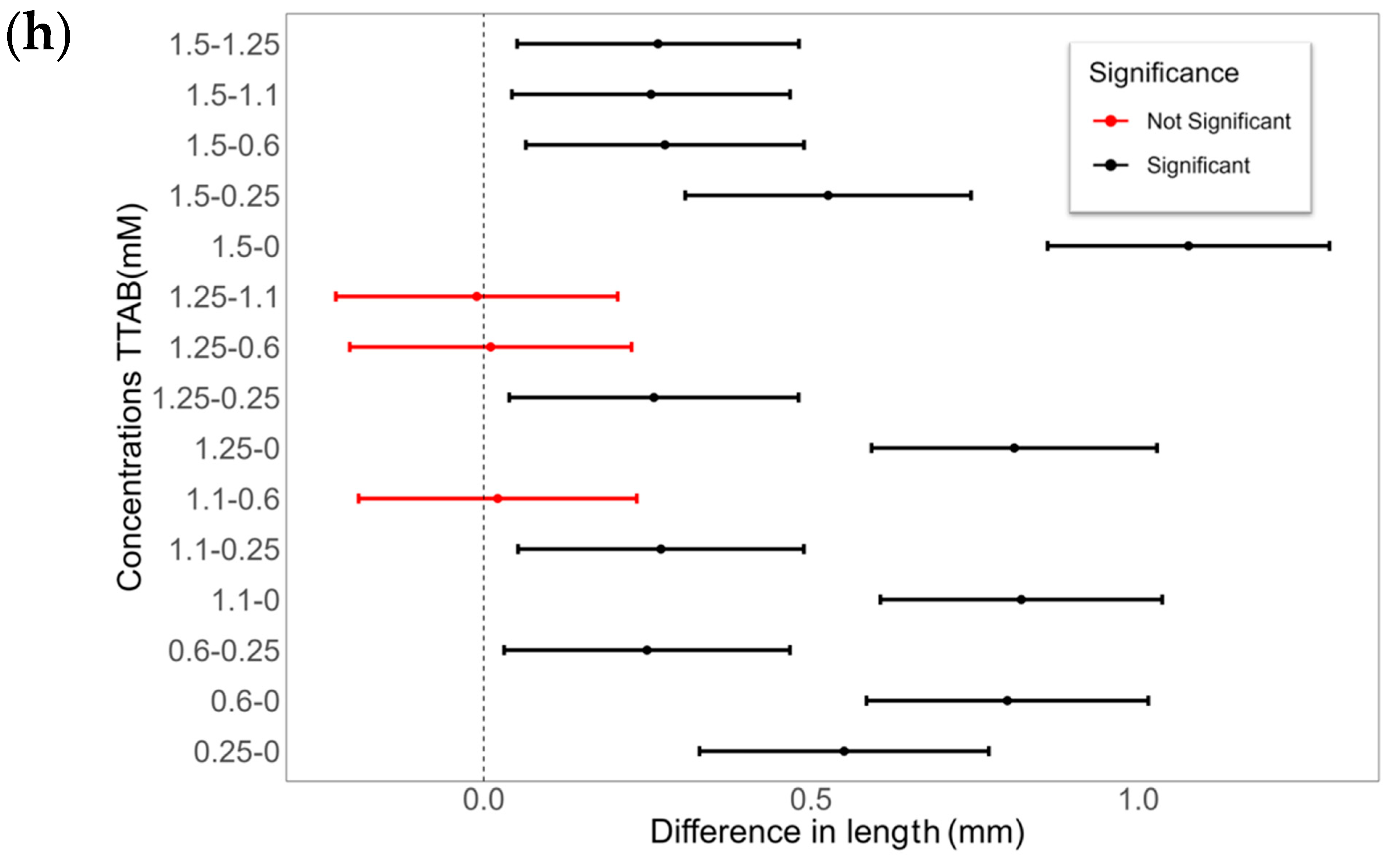
2.7. Statistical Analysis
3. Results and Discussion
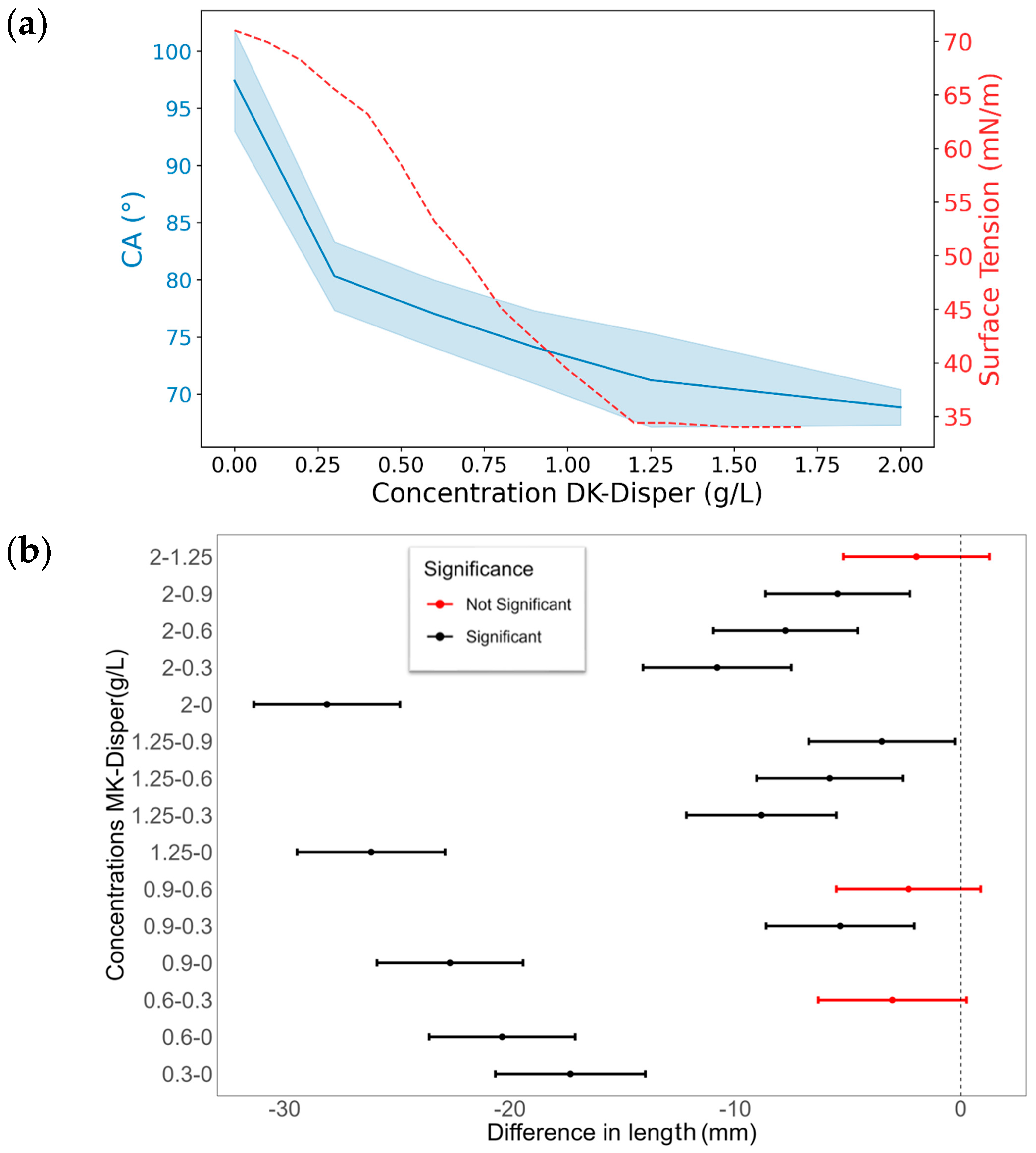
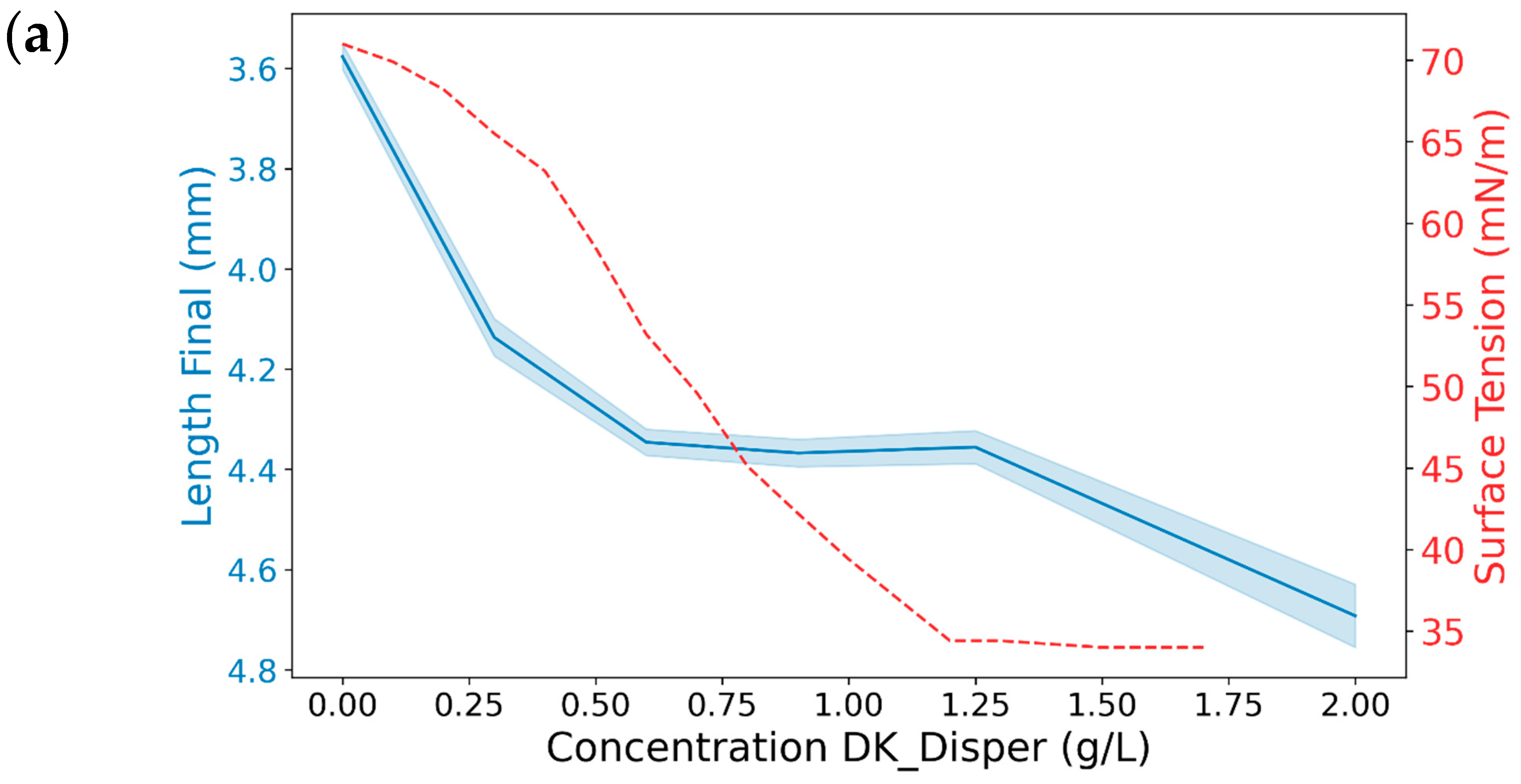
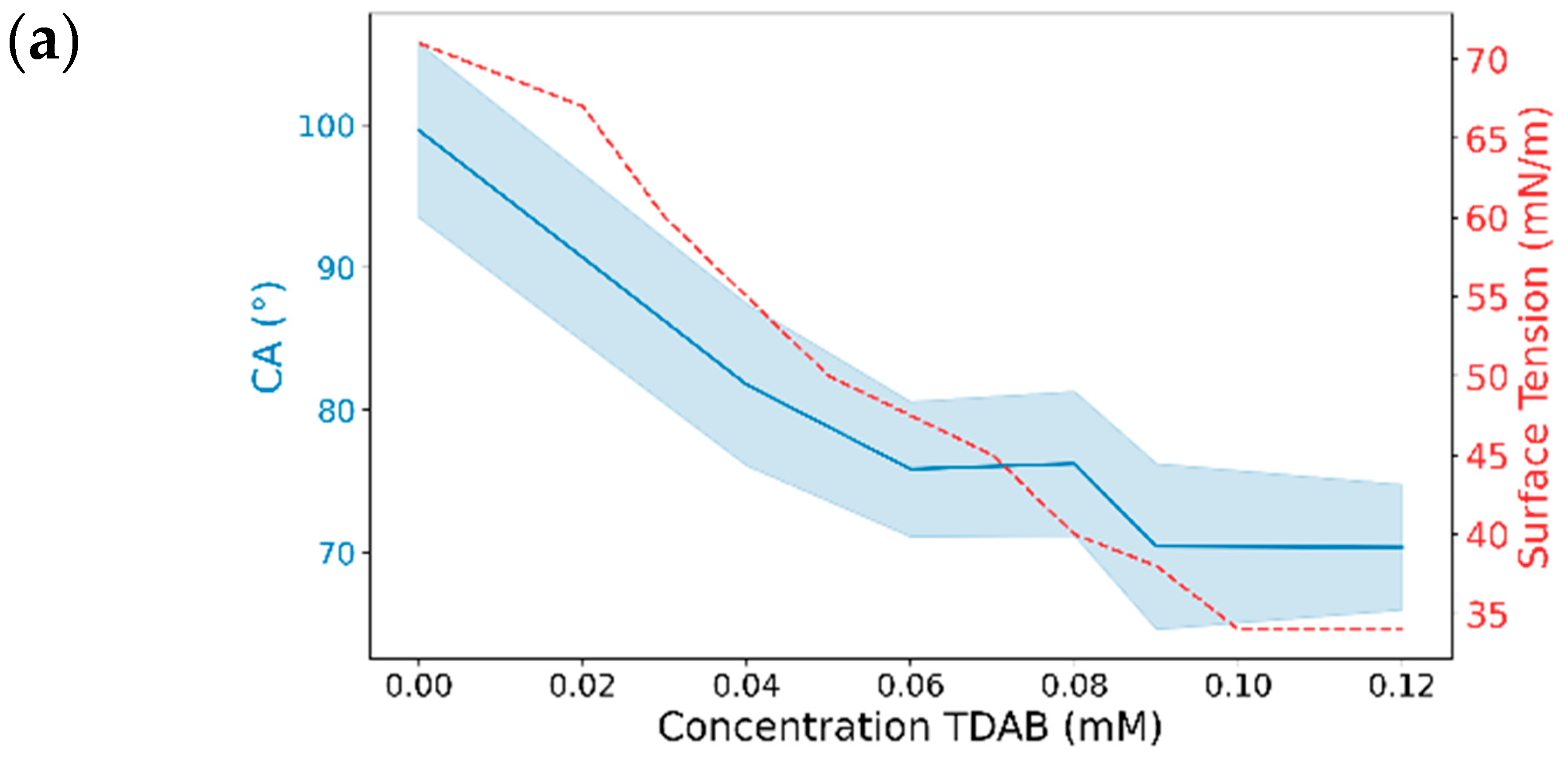
3.1. Impact of Marine Dispersant on Seawater Surface Tension
3.2. Device Characterization
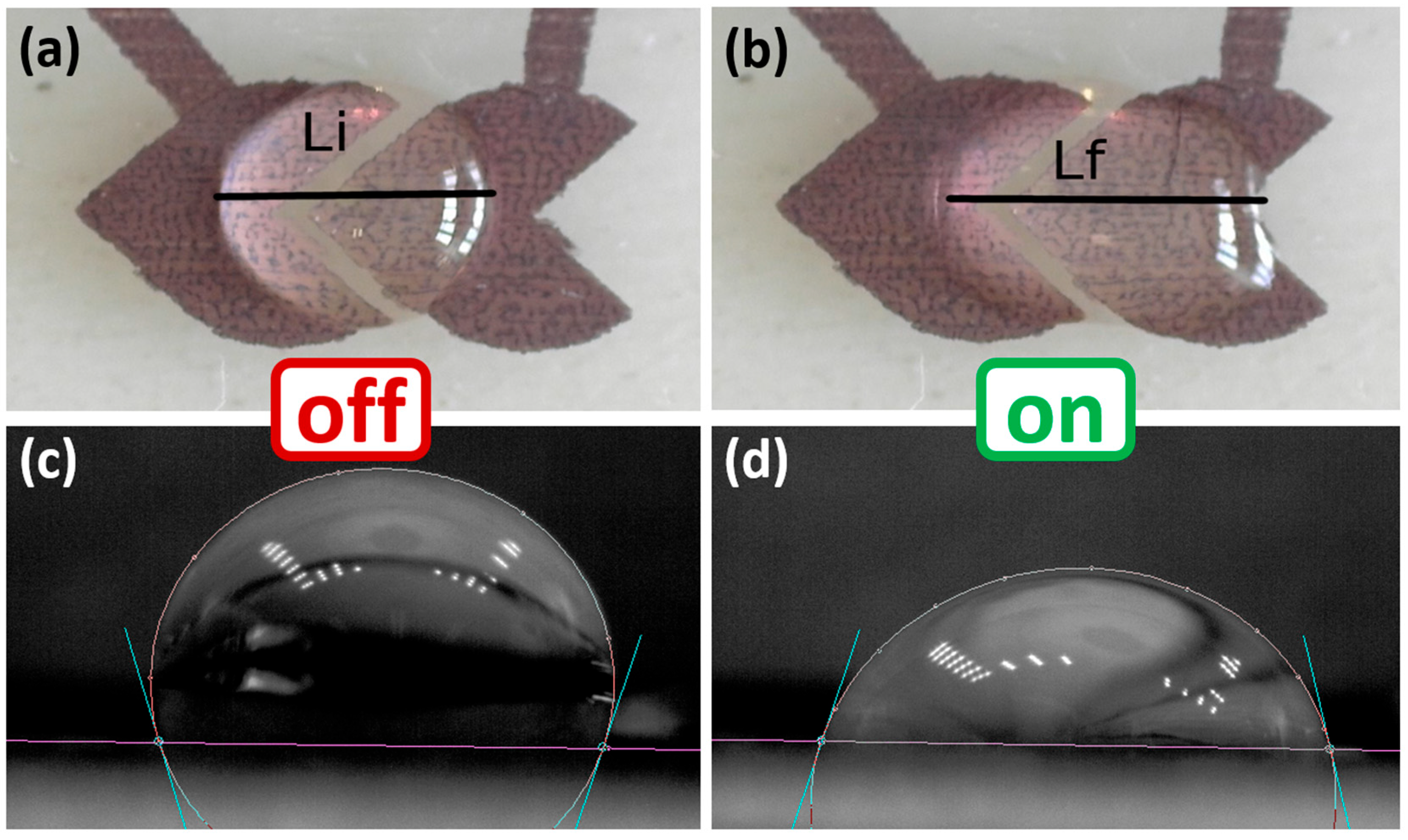
3.3. Volume and Voltage Measurement Methods
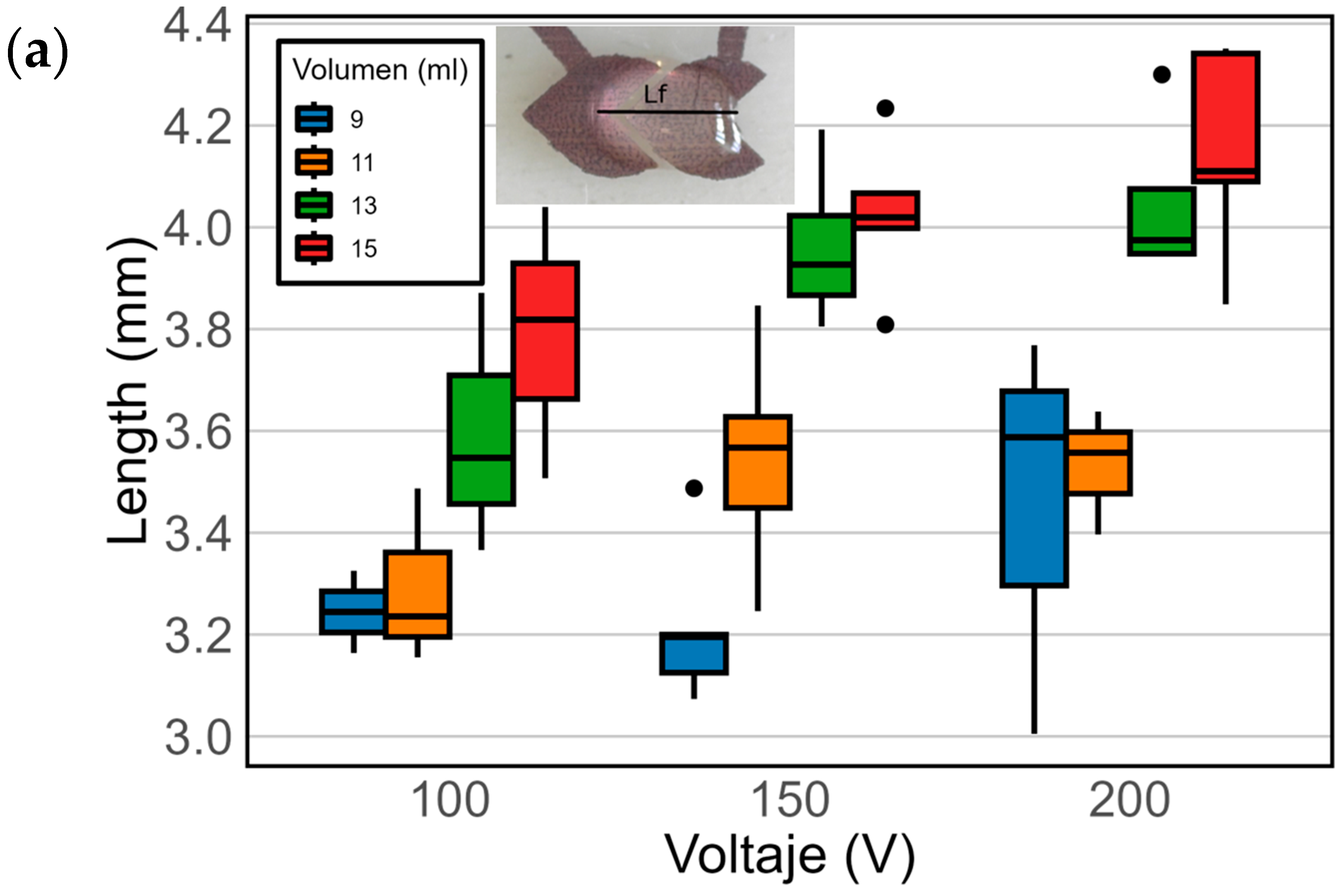
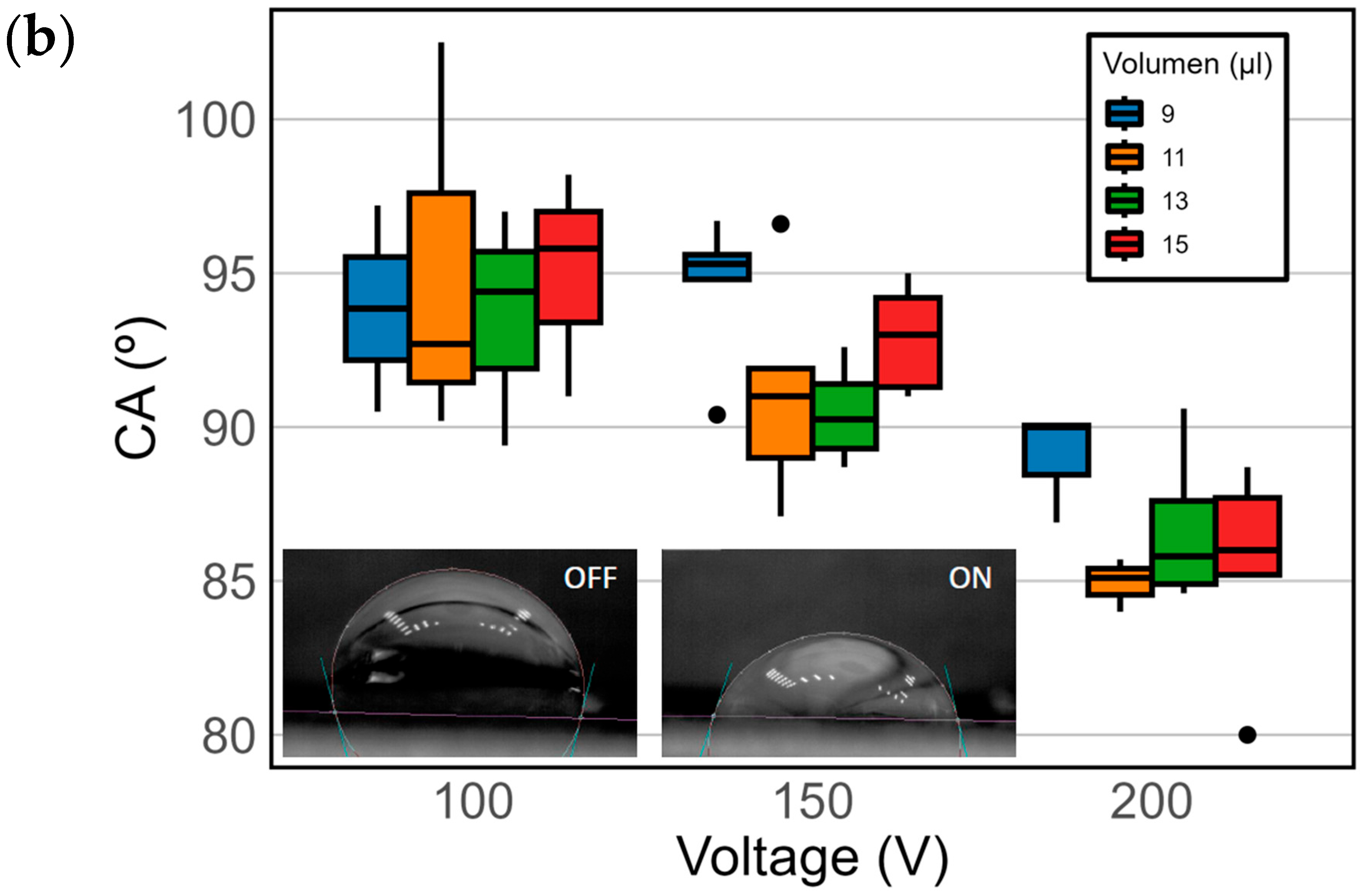
3.4. Parametric Optimization of the Droplet Volume Sensor Actuation Voltage
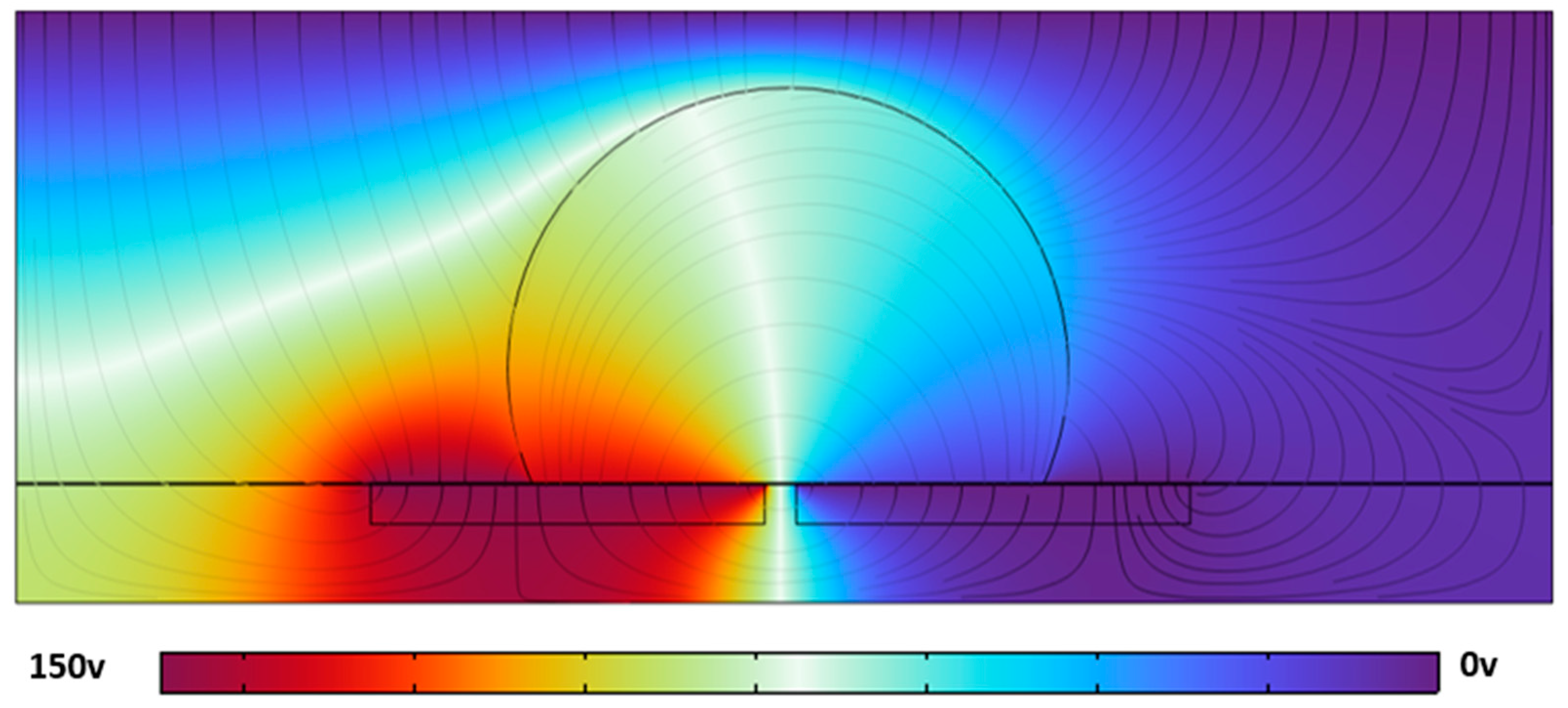
3.5. Numerical Simulation of Electric Field Distribution
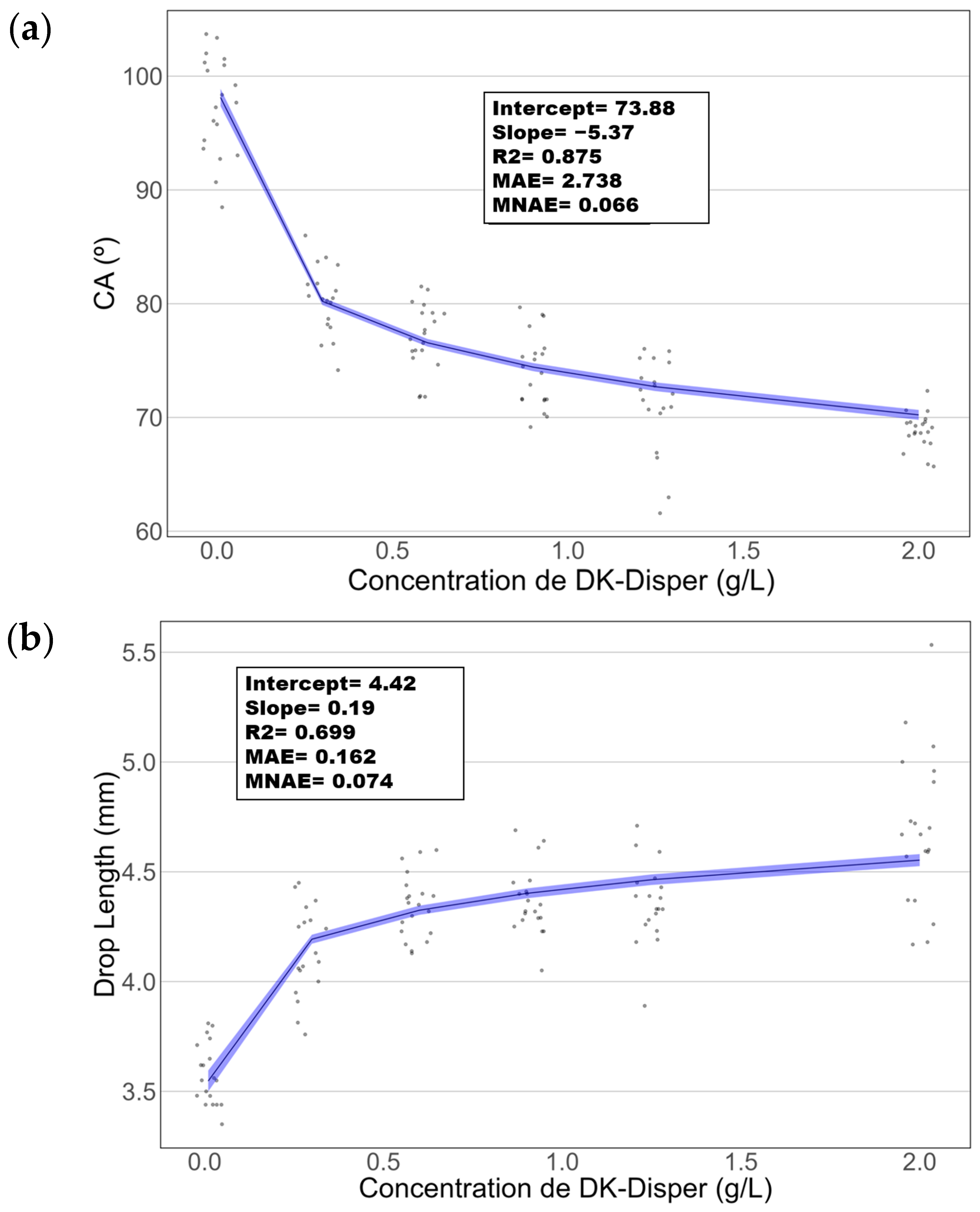
3.6. Sensor Calibration
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| EWOD | Electrowetting on Dielectric |
| CA | Contact Angle |
| LC-MS/MS | Liquid chromatography–tandem mass spectrometry |
| DOSS | Dioctyl sulfosuccinate |
| MS | Mass spectrometry |
| LC-HRMS | Liquid chromatography coupled to high-resolution mass spectrometry |
| TTAB | Tetradecyltrimethylammonium bromide |
| DTAB | n-Dodecyltrimethylammonium bromide |
| CMC | Critical micelle concentration |
| NMAE | Normalized Mean Absolute Error |
| MAE | Mean Absolute Error |
| LOD | Limit of Detection |
| OCA | Optical contact angle |
References
- Agboola, M.O.; Bekun, F.V.; Joshua, U. Pathway to environmental sustainability: Nexus between economic growth, energy consumption, CO2 emission, oil rent and total natural resources rent in Saudi Arabia. Resour. Policy 2021, 74, 102380. [Google Scholar] [CrossRef]
- Keramea, P.; Spanoudaki, K.; Zodiatis, G.; Gikas, G.; Sylaios, G. Oil spill modeling: A critical review on current trends, perspectives, and challenges. J. Mar. Sci. Eng. 2021, 9, 181. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, W.; Wan, Z.; Li, S.; Huang, T.; Fei, Y. Oil spills from global tankers: Status review and future governance. J. Clean. Prod. 2019, 227, 20–32. [Google Scholar] [CrossRef]
- Asif, Z.; Chen, Z.; An, C.; Dong, J. Environmental impacts and challenges associated with oil spills on shorelines. J. Mar. Sci. Eng. 2022, 10, 762. [Google Scholar] [CrossRef]
- Tedesco, P.; Balzano, S.; Coppola, D.; Esposito, F.P.; de Pascale, D.; Denaro, R. Bioremediation for the recovery of oil polluted marine environment, opportunities and challenges approaching the Blue Growth. Mar. Pollut. Bull. 2024, 200, 116157. [Google Scholar] [CrossRef]
- Data & Statistics—ITOPF. 2023. Available online: https://www.itopf.org/knowledge-resources/data-statistics/ (accessed on 16 November 2023).
- Michael, P.E.; Hixson, K.M.; Haney, J.C.; Satgé, Y.G.; Gleason, J.S.; Jodice, P.G.R. Seabird vulnerability to oil: Exposure potential, sensitivity, and uncertainty in the northern Gulf of Mexico. Front. Mar. Sci. 2022, 9, 880750. [Google Scholar] [CrossRef]
- Adofo, Y.K.; Nyankson, E.; Agyei-Tuffour, B. Dispersants as an oil spill clean-up technique in the marine environment: A review. Heliyon 2022, 8, e10153. [Google Scholar] [CrossRef]
- Sharma, K.; Shah, G.; Singh, H.; Bhatt, U.; Singhal, K.; Soni, V. Advancements in natural remediation management techniques for oil spills: Challenges, innovations, and future directions. Environ. Pollut. Manag. 2024, 1, 128–146. [Google Scholar] [CrossRef]
- Zhu, Z.; Merlin, F.; Yang, M.; Lee, K.; Chen, B.; Liu, B.; Cao, Y.; Song, X.; Ye, X.; Li, Q.K.; et al. Recent advances in chemical and biological degradation of spilled oil: A review of dispersants application in the marine environment. J. Hazard. Mater. 2022, 436, 129260. [Google Scholar] [CrossRef]
- White, H.K.; Karras, S. The Use of Dispersants in Marine Oil Spill Response. In International Oil Spill Conference; National Academies Press: Washington, DC, USA, 2021; p. 689431. [Google Scholar]
- Bavadi, M.; Song, X.; Zhu, Z.; Zhang, B. Generation of oil spill dispersants composed of biosurfactants and chemical surfactants: Mechanism exploration through molecular dynamics simulation. J. Environ. Chem. Eng. 2024, 12, 114249. [Google Scholar] [CrossRef]
- Cui, F.; Geng, X.; Robinson, B.; King, T.; Lee, K.; Boufadel, M.C. Oil droplet dispersion under a deep-water plunging breaker: Experimental measurement and numerical modeling. J. Mar. Sci. Eng. 2020, 8, 230. [Google Scholar] [CrossRef]
- Prince, R.C. A half century of oil spill dispersant development, deployment and lingering controversy. Int. Biodeterior. Biodegrad. 2023, 176, 105510. [Google Scholar] [CrossRef]
- Onokare, E.; Odokuma, L.; Sikoki, F.; Nziwu, B.; Iniaghe, P.; Ossai, J. Physicochemical Characteristics and Toxicity Studies of Crude Oil, Dispersant and Crude Oil-Dispersant Test Media to Marine Organisms. J. Niger. Soc. Phys. Sci. 2022, 4, 105–116. [Google Scholar] [CrossRef]
- Onokare, E.P.; Tesi, G.O.; Odokuma, L.O.; Sikoki, F.D. Effectiveness and toxicity of chemical dispersant in oil spill aquatic environment. Asian J. Water Environ. Pollut. 2022, 19, 41–46. [Google Scholar] [CrossRef]
- Ozhan, K.; Parsons, M.L.; Bargu, S. How were phytoplankton affected by the Deepwater Horizon oil spill? BioScience 2014, 64, 829–836. [Google Scholar] [CrossRef]
- Farahani, M.D.; Zheng, Y. The formulation, development and application of oil dispersants. J. Mar. Sci. Eng. 2022, 10, 425. [Google Scholar] [CrossRef]
- Tiwari, S.K.; Upadhyay, S.; Singh, V.K.; Dasgotra, A.; Umamaheswararao, A.; Sharma, H.; Pandey, J.K. Use of chemical dispersants for management of oil pollution. In Advances in Oil-Water Separation; Elsevier: Amsterdam, The Netherlands, 2022; pp. 263–281. [Google Scholar]
- French-McCay, D.P.; Robinson, H.; Bock, M.; Crowley, D.; Schuler, P.; Rowe, J.J. Counter-historical study of alternative dispersant use in the Deepwater Horizon oil spill response. Mar. Pollut. Bull. 2022, 180, 113778. [Google Scholar] [CrossRef]
- Giwa, A.; Chalermthai, B.; Shaikh, B.; Taher, H. Green dispersants for oil spill response: A comprehensive review of recent advances. Mar. Pollut. Bull. 2023, 193, 115118. [Google Scholar] [CrossRef]
- Quigg, A.; Farrington, J.W.; Gilbert, S.; Murawski, S.A.; John, V.T. A decade of GoMRI dispersant science. Oceanography 2021, 34, 98–111. [Google Scholar] [CrossRef]
- Fu, H.; Liu, W.; Sun, X.; Zhang, F.; Wei, J.; Li, Y.; Li, Y.; Lu, J.; Bao, M. Assessment of spilled oil dispersion affected by dispersant: Characteristic, stability, and related mechanism. J. Environ. Manag. 2024, 358, 120888. [Google Scholar] [CrossRef]
- Kujawinski, E.B.; Soule, M.C.K.; Valentine, D.L.; Boysen, A.K.; Longnecker, K.; Redmond, M.C. Fate of Dispersants Associated with the Deepwater Horizon Oil Spill. Environ. Sci. Technol. 2011, 45, 1298–1306. [Google Scholar] [CrossRef]
- Mathew, J.; Schroeder, D.L.; Zintek, L.B.; Schupp, C.R.; Kosempa, M.G.; Zachary, A.M.; Schupp, G.C.; Wesolowski, D.J. Dioctyl sulfosuccinate analysis in near-shore Gulf of Mexico water by direct-injection liquid chromatography–tandem mass spectrometry. J. Chromatogr. A 2012, 1231, 46–51. [Google Scholar] [CrossRef]
- Ramirez, C.E.; Batchu, S.R.; Gardinali, P.R. High sensitivity liquid chromatography tandem mass spectrometric methods for the analysis of dioctyl sulfosuccinate in different stages of an oil spill response monitoring effort. Anal. Bioanal. Chem. 2013, 405, 4167–4175. [Google Scholar] [CrossRef] [PubMed]
- Bugden, J.; Yeung, C.; Kepkay, P.; Lee, K. Application of ultraviolet fluorometry and excitation–emission matrix spectroscopy (EEMS) to fingerprint oil and chemically dispersed oil in seawater. Mar. Pollut. Bull. 2008, 56, 677–685. [Google Scholar] [CrossRef]
- Abou-Khalil, C.; Ji, W.; Prince, R.C.; Coelho, G.M.; Nedwed, T.J.; Lee, K.; Boufadel, M.C. Field fluorometers for assessing oil dispersion at sea. Mar. Pollut. Bull. 2023, 192, 115143. [Google Scholar] [CrossRef]
- Fu, J.; Cai, Z.; Gong, Y.; O’reilly, S.; Hao, X.; Zhao, D. A new technique for determining critical micelle concentrations of surfactants and oil dispersants via UV absorbance of pyrene. Colloids Surf. A Physicochem. Eng. Asp. 2015, 484, 1–8. [Google Scholar] [CrossRef]
- Cai, Z.; Gong, Y.; Liu, W.; Fu, J.; O’Reilly, S.; Hao, X.; Zhao, D. A surface tension based method for measuring oil dispersant concentration in seawater. Mar. Pollut. Bull. 2016, 109, 49–54. [Google Scholar] [CrossRef]
- Kalli, M.; Chagot, L.; Angeli, P. Comparison of surfactant mass transfer with drop formation times from dynamic interfacial tension measurements in microchannels. J. Colloid Interface Sci. 2022, 605, 204–213. [Google Scholar] [CrossRef]
- Kleinheins, J.; Shardt, N.; El Haber, M.; Ferronato, C.; Nozière, B.; Peter, T.; Marcolli, C. Surface tension models for binary aqueous solutions: A review and intercomparison. Phys. Chem. Chem. Phys. 2023, 25, 11055–11074. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Xu, S.; Wang, Y.; Chen, X. Contact angle hysteresis due to electric inhomogeneity of topographical patterning of dielectric layer in electrowetting. Colloids Surf. A Physicochem. Eng. Asp. 2024, 699, 134728. [Google Scholar] [CrossRef]
- Xu, X.; Wang, F.; Qin, Z.; Wen, B. Electrowetting lattice Boltzmann method for micro- and nano-droplet manipulations. Phys. Rev. E 2023, 107, 045305. [Google Scholar] [CrossRef] [PubMed]
- Feng, X.; Kim, Y.; Park, K.-S. Re-equilibrium of sessile droplets on vertically vibrating substrates. Microsyst. Technol. 2023, 29, 1129–1136. [Google Scholar] [CrossRef]
- Wang, W.; Rui, X.; Sheng, W.; Wang, Q.; Wang, Q.; Zhang, K.; Riaud, A.; Zhou, J. An asymmetric electrode for directional droplet motion on digital microfluidic platforms. Sens. Actuators B Chem. 2020, 324, 128763. [Google Scholar] [CrossRef]
- Razali, N.M.; Wah, Y.B. Power comparisons of shapiro-wilk, kolmogorov-smirnov, lilliefors and anderson-darling tests. J. Stat. Model Anal. 2011, 2, 21–33. [Google Scholar]
- Shapiro, S.S.; Wilk, M.B. An analysis of variance test for normality (complete samples). Biometrika 1965, 52, 591–611. [Google Scholar] [CrossRef]
- Ostertagová, E.; Ostertag, O.; Kováč, J. Methodology and application of the Kruskal-Wallis Test. Appl. Mech. Mater. 2014, 611, 115–120. [Google Scholar] [CrossRef]
- Abdi, H.; Williams, L.J. Newman-Keuls test and Tukey test. Encycl. Res. Des. 2010, 2, 897–902. [Google Scholar]
- Dinno, A. Nonparametric pairwise multiple comparisons in independent groups using Dunn’s test. Stata J. Promot. Commun. Stat. Stata 2015, 15, 292–300. [Google Scholar] [CrossRef]
- Schlegel, A. Post-Hoc Analysis: Tukey HSD in R. RPubs, 2017. Available online: https://rpubs.com/aaronsc32/post-hoc-analysis-tukey (accessed on 5 May 2025).
- Rice, M.E.; Harris, G.T. Comparing effect sizes in follow-up studies: ROC Area, Cohen’s d, and r. Law Hum. Behav. 2005, 29, 615–620. [Google Scholar] [CrossRef]
- Moulahoum, H.; Ghorbanizamani, F. The LOD paradox: When lower isn’t always better in biosensor research and development. Biosens. Bioelectron. 2024, 264, 116670. [Google Scholar] [CrossRef]
- Gegenschatz, S.A.; Chiappini, F.A.; Teglia, C.M.; de la Peña, A.M.; Goicoechea, H.C. Binding the gap between experiments, statistics, and method comparison: A tutorial for computing limits of detection and quantification in univariate calibration for complex samples. Anal. Chim. Acta. 2022, 1209, 339342. [Google Scholar] [CrossRef] [PubMed]
- Donati, G. The Case of the Limit of Detection. Braz. J. Anal. Chem. 2022, 9, 8–9. [Google Scholar] [CrossRef]
- Svitova, T.; Wetherbee, M.; Radke, C. Dynamics of surfactant sorption at the air/water interface: Continuous-flow tensiometry. J. Colloid Interface Sci. 2003, 261, 170–179. [Google Scholar] [CrossRef]
- Reichert, M.D.; Walker, L.M. Interfacial tension dynamics, interfacial mechanics, and response to rapid dilution of bulk surfactant of a model oil–water-dispersant system. Langmuir 2013, 29, 1857–1867. [Google Scholar] [CrossRef]
- Peng, M.; Duignan, T.T.; Nguyen, C.V.; Nguyen, A.V. From surface tension to molecular distribution: Modeling surfactant adsorption at the air–water interface. Langmuir 2021, 37, 2237–2255. [Google Scholar] [CrossRef]
- Mabrouk, M.M.; Hamed, N.A.; Mansour, F.R. Spectroscopic methods for determination of critical micelle concentrations of surfac-tants; a comprehensive review. Appl. Spectrosc. Rev. 2023, 58, 206–234. [Google Scholar] [CrossRef]
- Myers, D. Surfaces, Interfaces, and Colloids; Wiley: New York, NY, USA, 1999; Volume 415. [Google Scholar]
- Menger, F.M.; Shi, L.; Rizvi, S.A.A. Re-evaluating the Gibbs analysis of surface tension at the air/water interface. J. Am. Chem. Soc. 2009, 131, 10380–10381. [Google Scholar] [CrossRef]
- Caro-Pérez, O.; Casals-Terré, J.; Roncero, M.B. Materials and Manufacturing Methods for EWOD Devices: Current Status and Sustainability Challenges. Macromol. Mater. Eng. 2023, 308, 2200193. [Google Scholar] [CrossRef]
- Son, Y.; Kim, W.; Lee, D.; Chung, S.K. Study on repetitive damage-recovery cycle of hydrophobic coating for electrowetting-on-dielectric (EWOD) applications. Micro Nano Syst. Lett. 2024, 12, 4. [Google Scholar] [CrossRef]
- Chakrabarty, K.; Zeng, J. Design Automation Methods and Tools for Microfluidics-Based Biochips; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Sohail, S.; Das, S.; Biswas, K. Effect of Interface Layer Capacitance on Polydimethylsiloxane in Electrowetting-on-Dielectric Actuation. J. Exp. Phys. 2015, 2015, 426435. [Google Scholar] [CrossRef]
- Cho, S.K.; Moon, H.; Kim, C.-J. Creating, transporting, cutting, and merging liquid droplets by electrowetting-based actuation for digital microfluidic circuits. J. Microelectromech. Syst. 2003, 12, 70–80. [Google Scholar] [CrossRef]
- Brassard, D.; Malic, L.; Normandin, F.; Tabrizian, M.; Veres, T. Water-oil core-shell droplets for electrowetting-based digital microfluidic devices. Lab Chip 2008, 8, 1342–1349. [Google Scholar] [CrossRef] [PubMed]
- Sun, D.; Böhringer, K.F. EWOD-aided droplet transport on texture ratchets. Appl. Phys. Lett. 2020, 116, 093702. [Google Scholar] [CrossRef]
- Bhattacharjee, S.; Khan, S. Molecular insights into the electrowetting behavior of aqueous ionic liquids. Phys. Chem. Chem. Phys. 2022, 24, 1803–1813. [Google Scholar] [CrossRef]
- Mugele, F.; Baret, J.C. Electrowetting: From basics to applications. J. Phys. Condens. Matter. 2005, 17, R705. [Google Scholar] [CrossRef]
- Johansson, P.; Hess, B. Electrowetting diminishes contact line friction in molecular wetting. Phys. Rev. Fluids 2020, 5, 064203. [Google Scholar] [CrossRef]
- Li, X.; Ratschow, A.D.; Hardt, S.; Butt, H.-J. Surface charge deposition by moving drops reduces contact angles. Phys. Rev. Lett. 2023, 131, 228201. [Google Scholar] [CrossRef]
- Wang, W.; Zhou, J.; Xie, Y. Frequency-dependent contact angle hysteresis in electrowetting. Phys. Fluids 2022, 34, 121702. [Google Scholar] [CrossRef]
- Zhou, L.; Zhang, Z.; Tang, Y.; Men, C.; Luo, Y.; Wang, H.-T.; Liu, Y. Polarity-dependent electro-wetting/-dewetting for efficient droplet manipulation. Phys. Fluids 2024, 36, 031705. [Google Scholar] [CrossRef]
- Li, J.; Ha, N.S.; Liu, T.L.; van Dam, R.M.; Kim, C.J. Ionic-surfactant-mediated electro-dewetting for digital microfluidics. Nature 2019, 572, 507–510. [Google Scholar] [CrossRef]
- Raccurt, O.; Berthier, J.; Clementz, P.; Borella, M.; Plissonnier, M. On the influence of surfactants in electrowetting systems. J. Micromechanics Microengineering 2007, 17, 2217–2223. [Google Scholar] [CrossRef]
- Roques-Carmes, T.; Gigante, A.; Commenge, J.-M.; Corbel, S. Use of surfactants to reduce the driving voltage of switchable optical elements based on electrowetting. Langmuir 2009, 25, 12771–12779. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Caro-Pérez, O.; Roncero, M.B.; Casals-Terré, J. EWOD Sensor for Rapid Quantification of Marine Dispersants in Oil Spill Management. J. Sens. Actuator Netw. 2025, 14, 54. https://doi.org/10.3390/jsan14030054
Caro-Pérez O, Roncero MB, Casals-Terré J. EWOD Sensor for Rapid Quantification of Marine Dispersants in Oil Spill Management. Journal of Sensor and Actuator Networks. 2025; 14(3):54. https://doi.org/10.3390/jsan14030054
Chicago/Turabian StyleCaro-Pérez, Oriol, María Blanca Roncero, and Jasmina Casals-Terré. 2025. "EWOD Sensor for Rapid Quantification of Marine Dispersants in Oil Spill Management" Journal of Sensor and Actuator Networks 14, no. 3: 54. https://doi.org/10.3390/jsan14030054
APA StyleCaro-Pérez, O., Roncero, M. B., & Casals-Terré, J. (2025). EWOD Sensor for Rapid Quantification of Marine Dispersants in Oil Spill Management. Journal of Sensor and Actuator Networks, 14(3), 54. https://doi.org/10.3390/jsan14030054