
IoRT-Based Middleware for Heterogeneous Multi-Robot Systems




Abstract
1. Introduction
- Demonstrate the benefits of combining IRoT, Cloud Robotics, and Mesh Communication protocols for the implementation of flexible and efficient heterogeneous multi-robot systems.
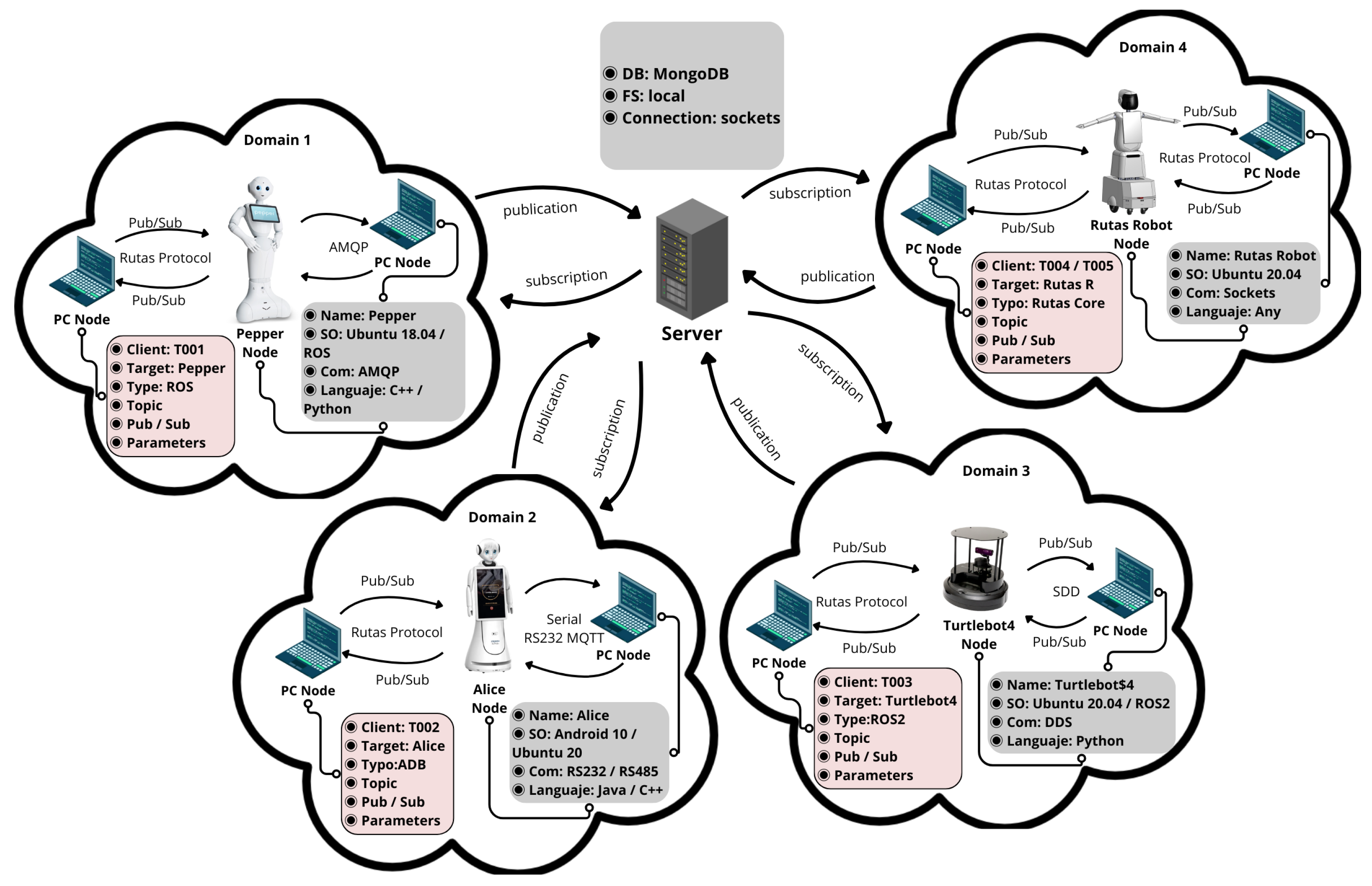
- Propose a middleware for multi-robots systems that allows heterogeneous robots located in different domains communicate and share information.
- Develop of a proof-of-concept based on a tourism environment populated by heterogeneous robots.
2. Multi-Robot Systems: Preliminaries
2.1. Internet of Robotic Things
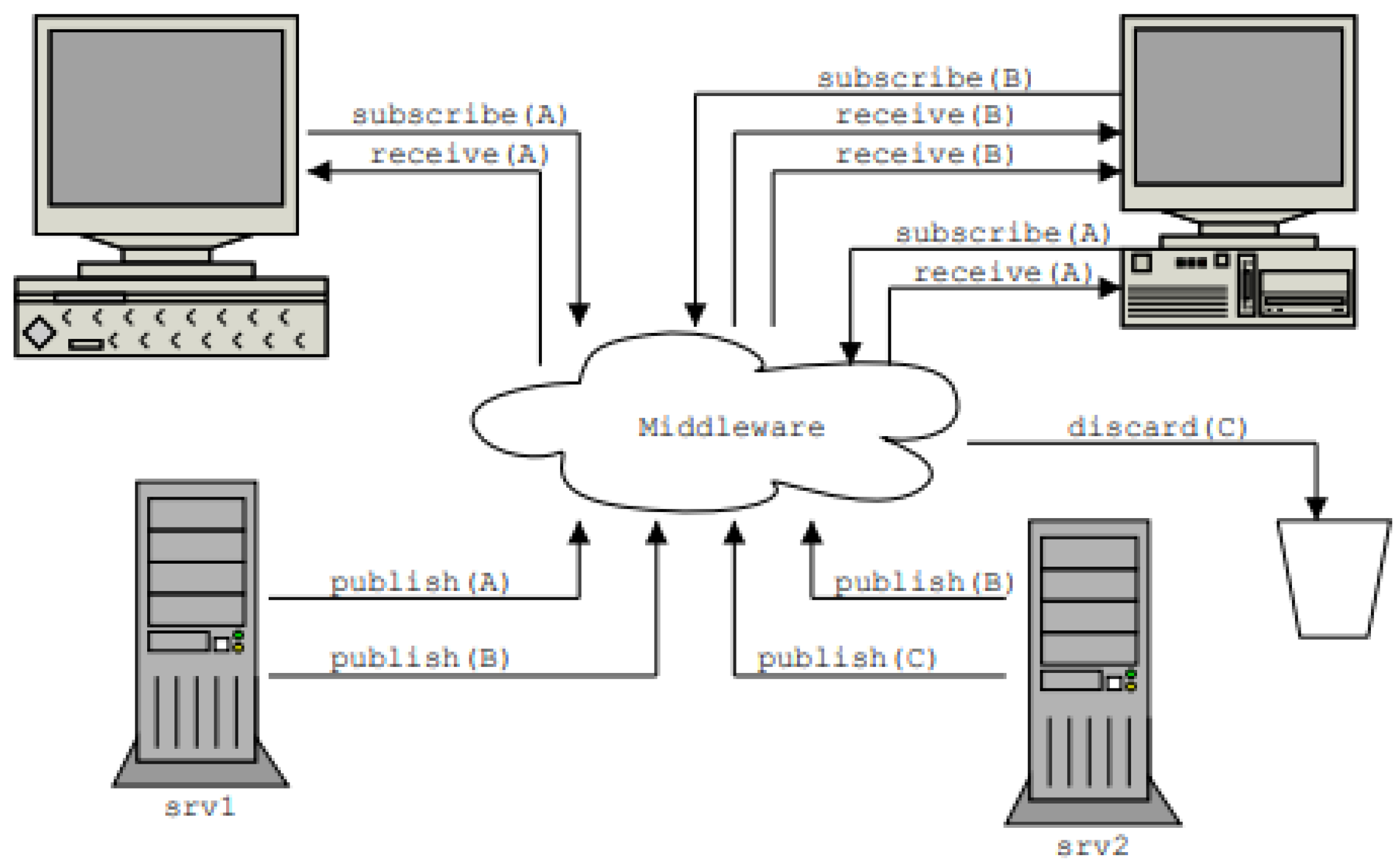
2.2. Communication in Heterogeneous Multi-Robot Systems
3. Related Work
4. A Middleware for Heterogeneous Multi-Robot Systems: Our Proposal
Middleware Implementation
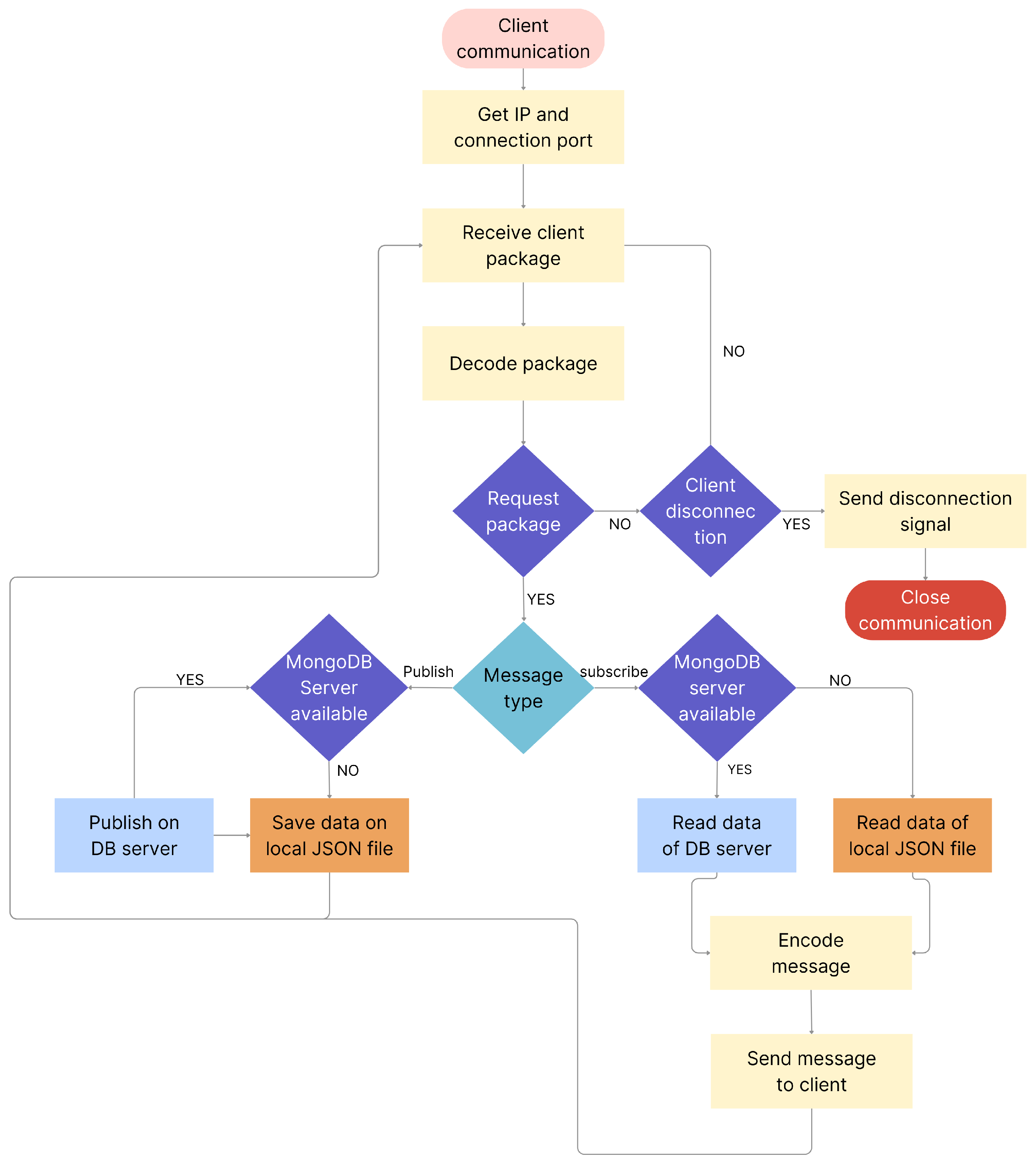
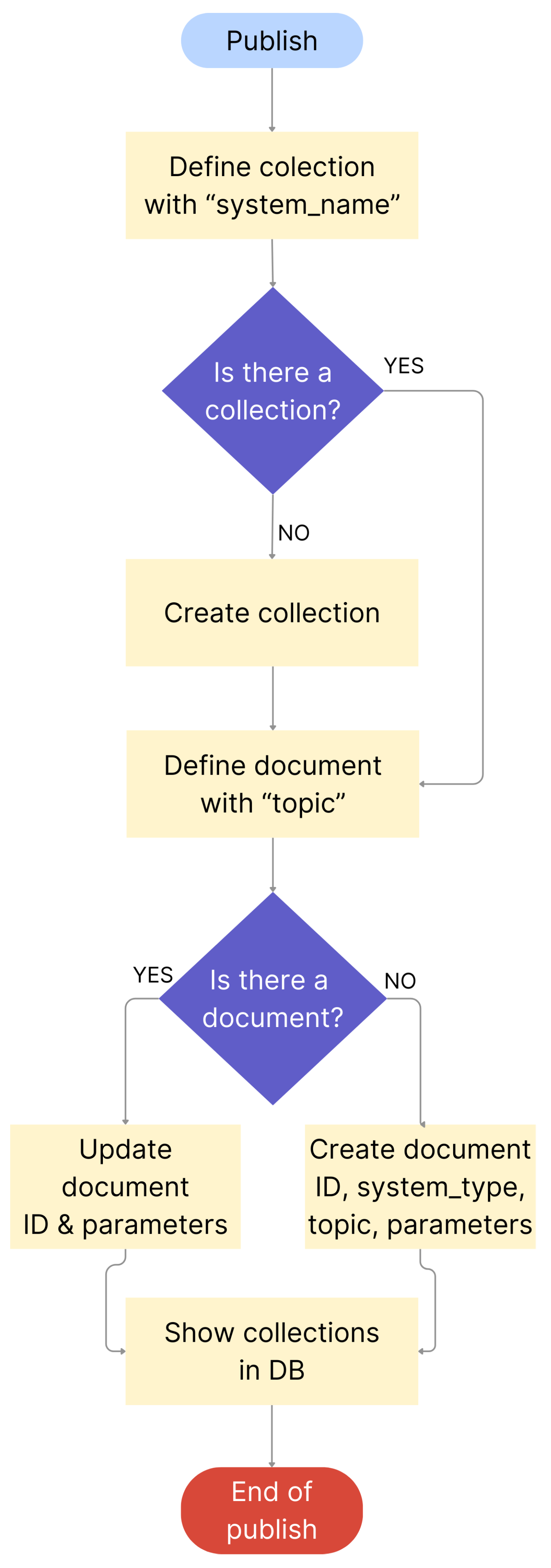
- If it is a publication package, the Server obtains the data from the client to store them into the remote database (MongoDB). Data are also stored in the Local File System of the Server and the client Node in JSON format. For publication in MongoDB (Figure 8), a Collection must first be defined using the value of the System Identifier within the package. If this Collection has not been already added to the database, it will be created. Then, a Document is defined using the Topic Identifier; in the same way, it is queried if the Document exists within the database Collection, and if it does not exist, a Document is created by adding the data contained in the package message. If the Document does exist, then the data it contains are updated.
- In the case of a subscription, the process to access the database is similar in terms of the queries that are made. A Collection is defined using the System Identifier; if it does not exist, an error message is generated. On the other hand, a database Document is defined using the Topic Identifier; similarly, if it does not exist, an error message is generated. If the Collection and the Document exist, then the data contained in the message are extracted to be sent to the client (see Figure 9). Another option that the Server has is to use the data stored in its Local File System, in case it does not have a connection to the database.
5. Application Case: Robots for Urban Tourism
5.1. Description of the Application Case Scenario
- 1.
- Pepper robot. Pepper is a semi-humanoid robot from the Aldebaran company. Among the sensors it includes, there are microphones, one front camera, two stereo depth cameras, contact sensors, shock sensors, lasers, infrared, sonars, one internal IMU, and a battery capacity sensor. As actuators, it uses the motors in the wheels and joints, one speaker, and LEDs. The information provided by these components can be accessed through topics. The following characteristics are presented in the configuration with which the Pepper robot works within the RUTAS project:
- Hardware: Intel ATOM E3845 Quad core, 1.91 GHz, 4 GB DDR3 RAM
- Operating System: Ubuntu 18.04
- Working system: NAOqi 2.9 and ROS Melodic.
- Communication model: AMQP 1.0
- Programming language used: C++ and Python 2.7
- Communication route: WiFi
- Transport protocol: TCP
- 2.
- Alice robot. Alice is also a semi-humanoid robot from the company CSJbot. Unlike the Pepper robot, this robot has fewer components and among the sensors, it has one lidar for mapping, one camera located at the top of the touch screen, microphones, one ultrasonic sensor for distances and a battery status controller. Another factor that makes this robot different is its use of two main control boards, one of them for the use of the Android operating system and another for the Ubuntu operating system, both communicating with each other. Most notable configuration features used in the Alice robot are:
- Hardware: Rockchip RK3399 Dual Cortex-A72 + Quad Cortex-A53, 2.0 GHz, 8 GB DDR3 RAM;
- Operating System: Android 10 and Ubuntu 20.04;
- Working system: COS (CSJbot operative system) and ADB;
- Communication model: RS232 between mainboards and sockets;
- Programming language used: Java and C++;
- Communication route: WiFi;
- Transport protocol: TCP.
- 3.
- Turtlebot4. This is a mobile robot with a circular shape, which is mainly used to perform SLAM; it has several sensors to fulfill its purpose: a charging station guidance system, an OAK -D spatial AI stereo camera, 2D Lidar, IMU, optical floor tracking sensor, wheel encoders, and infrared, cliff, bump, and slip detection. Likewise, the characteristics configured in this robot are the following:
- Hardware: Raspberry pi 4 Quad core Cortex-A72, 1.5 GHz, 4 GB DDR3 RAM;
- Operating System: Ubuntu 20.04 and 22.04;
- Job system: ROS2 Galactic and Humble;
- Communication model: DDS;
- Programming language used: Python 3;
- Communication route: WiFi;
- Transport protocol: TCP.
- 4.
- RUTAS robot. This is a robot created for the RUTAS project, which combines several characteristics that the previous robots have, but for the same purpose of applying its systems in social environments. It has one depth camera, one lidar, infrared sensors, distance sensors, an internal IMU, encoders on its two wheels, and six degrees of freedom located on its head and arms. The characteristics of the system used with this robot are as follows:
- Hardware: 8-Kern Arm Cortex-A78AE, 2 GHz, 16 GB DDR4 RAM;
- Operating System: Ubuntu 20.04;
- Work system: ROS Noetic;
- Communication model: AMQP 1.0;
- Programming language used: Python 3;
- Communication route: WiFi;
- Transport protocol: TCP.
- 5.
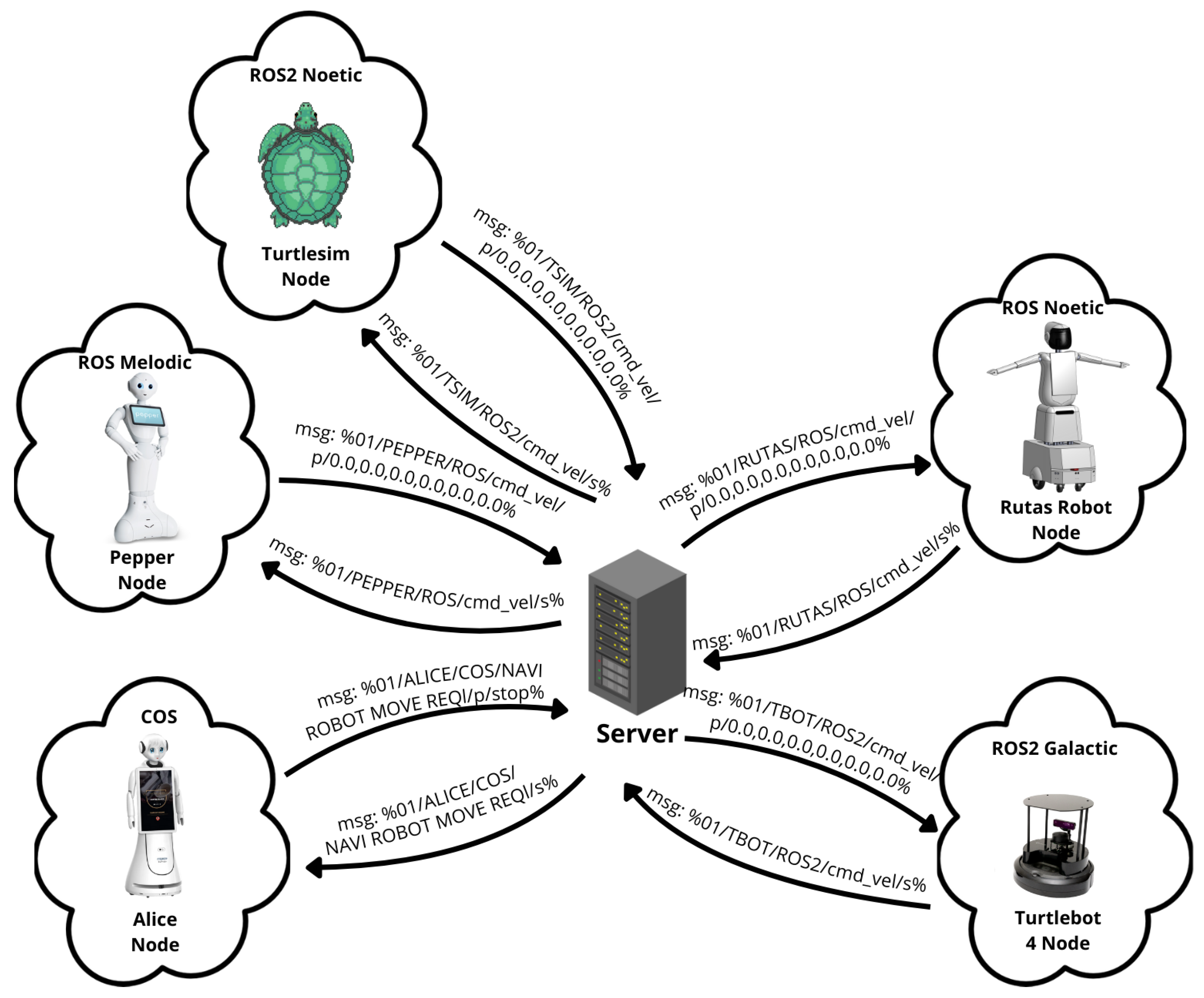
- Turtlesim. This is a tool integrated within ROSs, which encapsulates many of the fundamental topics handled by ROSs and some robots. Turtlesim is executed as a Robot Node that can receive and send messages. That is why, within the Server, ROS Noetic was installed to execute this Robot Node and can be used in comparison with the communication of other Robot Nodes. The characteristics that they present are the same as those of the Server and ROS Noetic:
- Work system: ROS Noetic;
- Communication model: TCPROS;
- Programming language used: Python 3;
- Communication route: WiFi;
- Transport protocol: TCP.
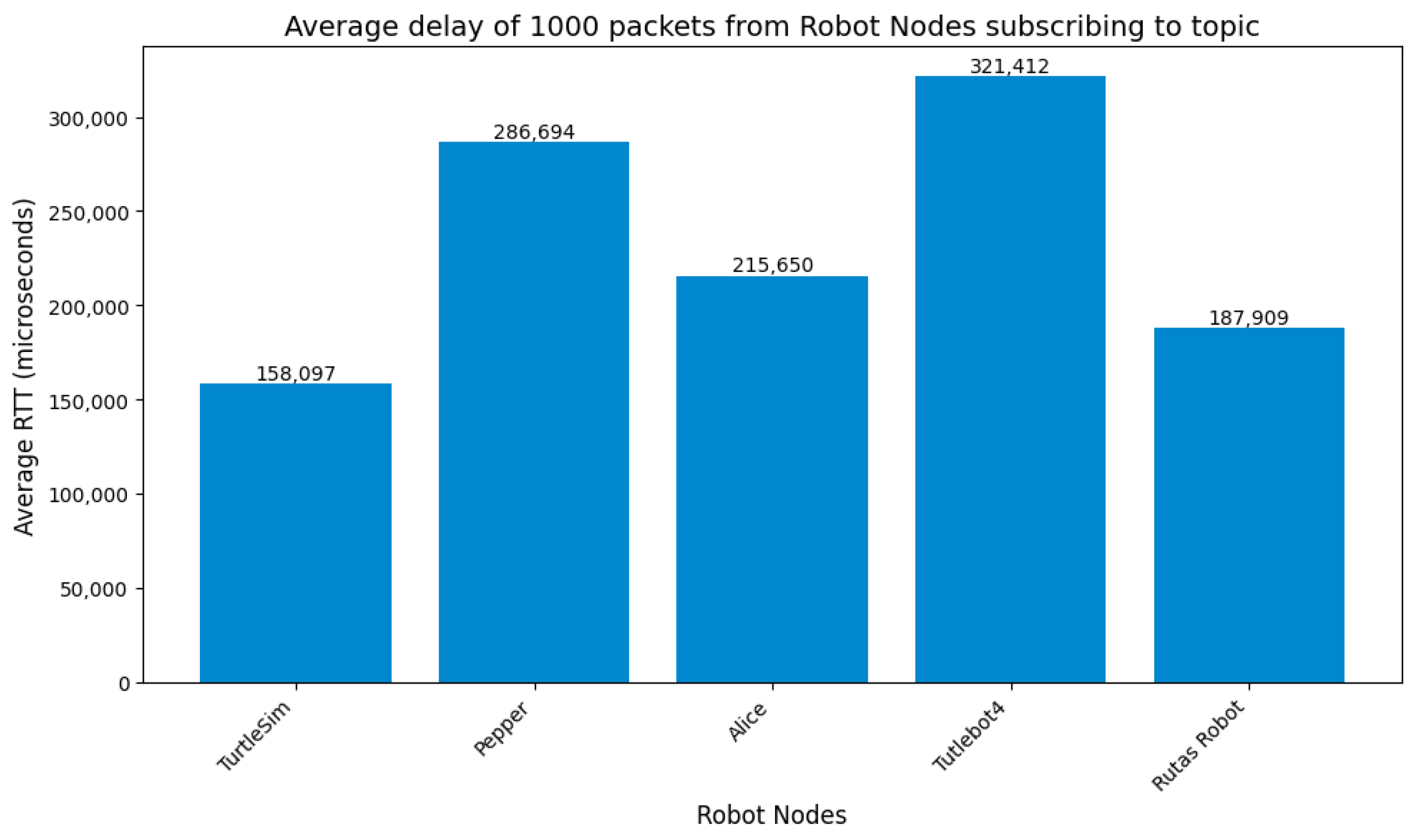
5.2. Tests and Results
6. General Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Baratta, A.; Cimino, A.; Gnoni, M.G.; Longo, F. Human Robot Collaboration in Industry 4.0: A literature review. Procedia Comput. Sci. 2023, 217, 1887–1895. [Google Scholar] [CrossRef] [PubMed]
- Stavropoulos, P.; Alexopoulos, K.; Makris, S.; Papacharalampopoulos, A.; Dhondt, S.; Chryssolouris, G. AI in manufacturing and the role of humans: Processes, robots, and systems. In Handbook of Artificial Intelligence at Work; Edward Elgar Publishing: Cheltenham, UK, 2024; pp. 119–141. [Google Scholar]
- Glas, D.F.; Kanda, T.; Ishiguro, H.; Hagita, N. Teleoperation of Multiple Social Robots. IEEE Trans. Syst. Man Cybern. Part Syst. Hum. 2012, 42, 530–544. [Google Scholar] [CrossRef]
- Chakraa, H.; Guérin, F.; Leclercq, E.; Lefebvre, D. Optimization techniques for Multi-Robot Task Allocation problems: Review on the state-of-the-art. Robot. Auton. Syst. 2023, 168, 104492. [Google Scholar] [CrossRef]
- Rosete, A.; Soares, B.; Salvadorinho, J.; Reis, J.; Amorim, M. Service Robots in the Hospitality Industry: An Exploratory Literature Review. In Exploring Service Science; Nóvoa, H., Drăgoicea, M., Kühl, N., Eds.; Springer: Cham, Switzerland, 2020; pp. 174–186. [Google Scholar]
- Luperto, M.; Monroy, J.R.J. Integrating Social Assistive Robots, IoT, Virtual Communities and Smart Objects to Assist at-Home Independently Living Elders: The MoveCare Project. Int. J. Soc. Robot. 2023, 15, 517–545. [Google Scholar] [CrossRef] [PubMed]
- Rosenberg-Kima, R.B.; Koren, Y.; Gordon, G. Robot-Supported Collaborative Learning (RSCL): Social Robots as Teaching Assistants for Higher Education Small Group Facilitation. Front. Robot. 2020, 6, 148. [Google Scholar] [CrossRef]
- Nisiotis, L.; Alboul, L. Initial Evaluation of an Intelligent Virtual Museum Prototype Powered by AI, XR and Robots. In Augmented Reality, Virtual Reality, and Computer Graphics; De Paolis, L.T., Arpaia, P., Bourdot, P., Eds.; Springer: Cham, Switzerland, 2021; pp. 290–305. [Google Scholar]
- Msala, Y.; Hamlich, M.; Mouchtachi, A. A new Robust Heterogeneous Multi-Robot Approach Based on Cloud for Task Allocation. In Proceedings of the 5th International Conference on Optimization and Applications, Kenitra, Morocco, 25–26 April 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Shorinwa, O.; Halsted, T.; Yu, J.; Schwager, M. Distributed Optimization Methods for Multi-robot Systems: Part 1—A Tutorial. IEEE Robot. Autom. Mag. 2024, 31, 121–138. [Google Scholar] [CrossRef]
- Rizk, Y.; Awad, M.; Tunstel, E.W. Cooperative heterogeneous multi-robot systems: A survey. ACM Comput. Surv. (CSUR) 2019, 52, 1–31. [Google Scholar] [CrossRef]
- Casals Gelpi, A.; Vinagre Ruiz, M.; Aranda López, J.; Amat Girbau, J. Plataforma para un entorno asistencial inteligente heterogéneo. In Proceedings of the Jornadas Nacionales de Robótica—Spanish Robotics Conference. Comité Español de Automática (CEA-IFAC), Valladolid, Barcelona, 14–15 June 2018; pp. 1–6. [Google Scholar]
- Barber, R.; Ortiz, F.J.; Calatrava, F.M.; Garrido, S.; Alfonso, L.M.J.; Vera, A.M.; Prados, A.; Roca, J.; Jiménez, M.; Mendez, I.; et al. Himtae: Sistema heterogéneo multirobot para ayuda de personas mayores en un ambiente asistido en el hogar. XII Jornadas Nac. RobóTica (MáLaga Univ. MáLaga) 2022, 106–117, ISBN 978-84-09-41095-8. [Google Scholar]
- Batth, R.S.; Nayyar, A.; Nagpal, A. Internet of Robotic Things: Driving Intelligent Robotics of Future—Concept, Architecture, Applications and Technologies. In Proceedings of the 4th International Conference on Computing Sciences, Jalandhar, India, 30–31 August 2018; pp. 151–160. [Google Scholar] [CrossRef]
- Bhat, K.U.; Kumar, N.; Koul, N.; Verma, C.; Enescu, F.M.; Raboaca, M.S. Intelligent Communication for Internet of Things (IoRT). In Proceedings of the International Conference on Recent Innovations in Computing; Springer Nature: Singapore, 2023; pp. 313–328. [Google Scholar]
- Kabir, H.; Tham, M.L.; Chang, Y.C. Internet of robotic things for mobile robots: Concepts, technologies, challenges, applications, and future directions. Digit. Commun. Netw. 2023, 9, 1265–1290. [Google Scholar] [CrossRef]
- Odirichukwu, J.; Ndigwe, C.; Njoku, O. Internet of Things (IoT), Internet of Robotic Things (IoRT), IoT Security (IoTS) and Machine Learning Algorithms: A Review Perspective. Univ. Ib. J. Sci. Log. Ict Res. 2023, 9, 74–81, ISSN: 2714-3627. [Google Scholar]
- Odirichukwu, J.; Asagba, P.; Onuodu, F. Interoperable Protocols of the Internet of Things and Internet Of Robotic Things: A Review. Int. J. Comput. Intell. Secur. Res. 2021, 1, 101–123. [Google Scholar]
- Vermesan, O.; Bahr, R.; Ottella, M.; Serrano, M.; Karlsen, T.; Wahlstrøm, T.; Sand, H.E.; Ashwathnarayan, M.; Gamba, M.T. Internet of Robotic Things Intelligent Connectivity and Platforms. Front. Robot. 2020, 7, 509753. [Google Scholar] [CrossRef] [PubMed]
- Bi, Z.; Miao, Z.; Zhang, B.; Zhang, C.W.J. Framework for Performance Assessment of Heterogeneous Robotic Systems. IEEE Syst. J. 2021, 15, 1191–1201. [Google Scholar] [CrossRef]
- Sewtz, M.; Lay, F.S.; Luo, X.; Chupin, T.; Lii, N.Y. Enabling Communication between Heterogeneous Robots and Human Operators in Collaborative Missions. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2024; pp. 1–8. [Google Scholar] [CrossRef]
- Rajapaksha, U.K.; Jayawardena, C.; MacDonald, B.A. ROS Based Heterogeneous Multiple Robots Control Using High Level User Instructions. In Proceedings of the IEEE Region 10 Conference (TENCON), Auckland, New Zealand, 7–10 December 2021; pp. 163–168. [Google Scholar] [CrossRef]
- Shi, L.; Marcano, N.J.H.; Jacobsen, R.H. A review on communication protocols for autonomous unmanned aerial vehicles for inspection application. Microprocess. Microsyst. 2021, 86, 104340. [Google Scholar] [CrossRef]
- Tuci, E.; Alkilabi, M.H.M.; Akanyeti, O. Cooperative Object Transport in Multi-Robot Systems: A Review of the State-of-the-Art. Front. Robot. 2018, 5, 1–31. [Google Scholar] [CrossRef] [PubMed]
- Sahni, Y.; Cao, J.; Jiang, S. Middleware for multi-robot systems. In Mission-Oriented Sensor Networks and Systems: Art and Science: Volume 2: Advances; Springer: Cham, Switzerland, 2019; pp. 633–673. [Google Scholar]
- Anderson, J.E. Humanoid Multi-robot Systems. In Humanoid Robotics: A Reference; Goswami, A., Vadakkepat, P., Eds.; Springer: Dordrecht, The Netherlands, 2019; pp. 2473–2481. [Google Scholar] [CrossRef]
- Wan, J.; Tang, S.; Yan, H.; Li, D.; Wang, S.; Vasilakos, A.V. Cloud robotics: Current status and open issues. IEEE Access 2016, 4, 2797–2807. [Google Scholar] [CrossRef]
- Grieco, L.; Rizzo, A.; Colucci, S.; Sicari, S.; Piro, G.; Di Paola, D.; Boggia, G. IoT-aided robotics applications: Technological implications, target domains and open issues. Comput. Commun. 2014, 54, 32–47. [Google Scholar] [CrossRef]
- Shakya, S. Survey on Cloud Based Robotics Architecture, Challenges and Applications. J. Ubiquitous Comput. Commun. Technol. 2020, 2, 10–18. [Google Scholar] [CrossRef]
- Chen, W.; Yaguchi, Y.; Naruse, K.; Watanobe, Y.; Nakamura, K.; Ogawa, J. A Study of Robotic Cooperation in Cloud Robotics: Architecture and Challenges. IEEE Access 2018, 6, 36662–36682. [Google Scholar] [CrossRef]
- Halsted, T.; Shorinwa, O.; Yu, J.; Schwager, M. A Survey of Distributed Optimization Methods for Multi-Robot Systems. arXiv 2021, arXiv:2103.12840. [Google Scholar]
- Gielis, J.; Shankar, A.; Prorok, A. A critical review of communications in multi-robot systems. Curr. Robot. Rep. 2022, 3, 213–225. [Google Scholar] [CrossRef] [PubMed]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J. Secure Communication in Multi-Robot Systems. In Proceedings of the IEEE Systems Security Symposium, Crystal City, VA, USA, 1 July–1 August 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Matteucci, M. Publish/Subscribe Middleware for Robotics: Requirements and State of the Art. Tech. Report N 2003.3. Citeseer, 2003, pp. 1–36. Available online: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=82e61c3c0a3c5719e0312b7f5f39fff17040ffe0 (accessed on 27 October 2024).
- Yan, Z.; Fabresse, L.; Laval, J.; Bouraqadi, N. Building a ROS-Based Testbed for Realistic Multi-Robot Simulation: Taking the Exploration as an Example. Robotics 2017, 6, 21. [Google Scholar] [CrossRef]
- Macenski, S.; Foote, T.; Gerkey, B.; Lalancette, C.; Woodall, W. Robot Operating System 2: Design, architecture, and uses in the wild. Sci. Robot. 2022, 7, eabm6074. [Google Scholar] [CrossRef]
- Gao, Z.; Wanyama, T.; Singh, I.; Gadhrri, A.; Schmidt, R. From Industry 4.0 to Robotics 4.0—A Conceptual Framework for Collaborative and Intelligent Robotic Systems. Procedia Manuf. 2020, 46, 591–599. [Google Scholar] [CrossRef]
- Ferranti, L.; D’Oro, S.; Bonati, L.; Demirors, E.; Cuomo, F.; Melodia, T. HIRO-NET: Self-Organized Robotic Mesh Networking for Internet Sharing in Disaster Scenarios. In Proceedings of the IEEE 20th International Symposium on “A World of Wireless, Mobile and Multimedia Networks”, Washington, DC, USA, 10–12 June 2019; pp. 1–9. [Google Scholar] [CrossRef]
- Lončar, I.; Babić, A.; Arbanas, B.; Vasiljević, G.; Petrović, T.; Bogdan, S.; Mišković, N. A Heterogeneous Robotic Swarm for Long-Term Monitoring of Marine Environments. Appl. Sci. 2019, 9, 1388. [Google Scholar] [CrossRef]
- Dey, E.; Walczak, M.; Anwar, M.S.; Roy, N.; Freeman, J.; Gregory, T.; Suri, N.; Busart, C. A Novel ROS2 QoS Policy-Enabled Synchronizing Middleware for Co-Simulation of Heterogeneous Multi-Robot Systems. In Proceedings of the 32nd International Conference on Computer Communications and Networks, Honolulu, HI, USA, 24–27 July 2023; pp. 1–10. [Google Scholar] [CrossRef]
- Cornejo-Lupa, M.A.; Cardinale, Y.; Ticona-Herrera, R.; Barrios-Aranibar, D.; Andrade, M.; Diaz-Amado, J. Ontoslam: An ontology for representing location and simultaneous mapping information for autonomous robots. Robotics 2021, 10, 125. [Google Scholar] [CrossRef]
- Daza, M.; Barrios-Aranibar, D.; Diaz-Amado, J.; Cardinale, Y.; Vilasboas, J. An approach of social navigation based on proxemics for crowded environments of humans and robots. Micromachines 2021, 12, 193. [Google Scholar] [CrossRef]
- Tejada-Mesias, A.; Dongo, I.; Cardinale, Y.; Diaz-Amado, J. Odrom: Object detection and recognition supported by ontologies and applied to museums. In Proceedings of the XLVII Latin American Computing Conference (CLEI), Cartago, Costa Rica, 25–29 October 2021; pp. 1–10. [Google Scholar]
- Quiroz, M.; Patiño, R.; Diaz-Amado, J.; Cardinale, Y. Group emotion detection based on social robot perception. Sensors 2022, 22, 3749. [Google Scholar] [CrossRef]
- Graterol, W.; Diaz-Amado, J.; Cardinale, Y.; Dongo, I.; Lopes-Silva, E.; Santos-Libarino, C. Emotion detection for social robots based on NLP transformers and an emotion ontology. Sensors 2021, 21, 1322. [Google Scholar] [CrossRef]
- Heredia, J.; Cardinale, Y.; Dongo, I.; Aguilera, A.; Diaz-Amado, J. Multimodal emotional understanding in robotics. In Workshops at 18th International Conference on Intelligent Environments (IE2022)—1st International Workshop on Sentiment Analysis and Emotion Recognition for Social Robots (SENTIRobots); IOS Press: Amsterdam, The Netherlands, 2022; pp. 46–55. [Google Scholar]
- Miller, R.B. Response time in man-computer conversational transactions. In Proceedings of the 9–11 December 1968, Fall Joint Computer Conference, Part I, San Francisco, CA, USA, 9–11 December 1968; pp. 267–277. [Google Scholar]
- Stonebraker, M.; Çetintemel, U.; Zdonik, S. The 8 requirements of real-time stream processing. ACM Sigmod Rec. 2005, 34, 42–47. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Computing Model | Resource Level | Latency Mainly Caused by | Intelligence Level | Application |
|---|---|---|---|---|---|
| Stand-alone robots | On-board computing | Weak | Computing workload | Low | Static and structured tasks |
| Networked robotic system | Ad hoc cloud computing | Medium | Computing and communication workloads | Medium | Real-time processing |
| Cloud robotic system | Hybrid computing | Strong | Communication workload | High | Both real-time processing and resource applications |
| Reference | Objective | Communication | Heterogeneity Level |
|---|---|---|---|
| Casals et al., 2018 [12] | Control and management of heterogeneous devices for healthcare environments | Through the ROS but does not exchange information between devices, only a central communication system | Heterogeneous robots and devices with ROS |
| Sewtz et al., 2024 [21] | Control different robots remotely, simplifying their communication | Implementation of a communication model based on identifiers targeting a central system | Heterogeneous robots for International Space Station |
| Rajapaksha et al., 2021 [22] | Middleware that allows connectivity and control of heterogeneous robots | Publication/subscription model and ontologies. Instructions are assigned to each robot separately | Heterogeneous robots |
| Shi et al., 2021 [23] | Propose a communication system based on the hierarchical needs of drones | Communication based on ROS nodes and the DDS protocol | Aerial drones with similar characteristics |
| Yan et al., 2017 [35] | Achieve communication between heterogeneous robots for collaboration in navigation | The ROS system is the communication middleware | Applicable for collaboration between aerial and terrestrial robots |
| Macenski et al., 2022 [36] | Analyze the use of ROSs in multi-robot environments | Based on ROS2 and the DDS communication protocol | Support homogeneous robots |
| Gao et al., 2020 [37] | Collaborative communication between robots and other devices | Communication scope between ROS1 and ROS2 | Heterogeneous robots |
| Ferranti et al., 2019 [38] | Heterogeneous communication system for robots with communication limitations | Communication via Wi-Fi, Cellular, satellite, and BLE | Drones with same equipment |
| Loncar et al., 2019 [39] | Network of sensors distributed in a swarm of heterogeneous robots | Finite state machine as a communication model | Interaction between two types of robots |
| Dey et al., 2023 [40] | Robot-agnostic middleware for speed control and transmission | Based on ROS1 and ROS2 | Heterogeneous robots with ROS system |
| Feature | MQTT | AMQP | DDS |
|---|---|---|---|
| Architecture | Client/Broker | Client/Broker Client/Server | Without intermediary |
| Transport protocol | TCP (WebScoket) | TCP, SCTP (WebSocket) | UDP, TCP |
| Security | TLS/SSL | TLS/SSL, IPSec, SASL | DDS plugins |
| Connectivity | One to one, one to many, many to many | Point to point | P2P, one to one, one to many, many to many, many to one |
| Bandwidth consumption | Depends on number of packages | Low | High |
| Size header | 2 Bytes | 8 Bytes | Not defined |
| QoS | QoS 0 QoS 1 QoS 2 | Settle Format (similar to At Most once) or Unsettle Format (similar to At Least once) | 23 QoS levels, high reliability |
| Self-discovery | Topics | Does not own | Publisher, subscriber, topical |
| Identification of messages | By topic | Queue, topic/ routing key | Topic/key |
| Robot | System | Topic | Parametes |
|---|---|---|---|
| Turtlesim | ROS2 | cmd_vel | x/y/z/a/b/c |
| Turtlebot4 | ROS2 | cmd_vel | x/y/z/a/b/c |
| RUTAS robot | ROS | cmd_vel | x/y/z/a/b/c |
| Pepper robot | ROS | cmd_vel | x/y/z/a/b/c |
| Alice robot | COS | NAVI_ROBOT_MOVE_REQ NAVI_GO_ROTATION_REQ | direction |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cuadros Zegarra, E.; Barrios Aranibar, D.; Cardinale, Y. IoRT-Based Middleware for Heterogeneous Multi-Robot Systems. J. Sens. Actuator Netw. 2024, 13, 87. https://doi.org/10.3390/jsan13060087
Cuadros Zegarra E, Barrios Aranibar D, Cardinale Y. IoRT-Based Middleware for Heterogeneous Multi-Robot Systems. Journal of Sensor and Actuator Networks. 2024; 13(6):87. https://doi.org/10.3390/jsan13060087
Chicago/Turabian StyleCuadros Zegarra, Emil, Dennis Barrios Aranibar, and Yudith Cardinale. 2024. "IoRT-Based Middleware for Heterogeneous Multi-Robot Systems" Journal of Sensor and Actuator Networks 13, no. 6: 87. https://doi.org/10.3390/jsan13060087
APA StyleCuadros Zegarra, E., Barrios Aranibar, D., & Cardinale, Y. (2024). IoRT-Based Middleware for Heterogeneous Multi-Robot Systems. Journal of Sensor and Actuator Networks, 13(6), 87. https://doi.org/10.3390/jsan13060087