
Dynamic Event-Triggered Control for Sensor–Controller–Actuator Networked Control Systems



Abstract
1. Introduction
- We develop asynchronous dynamic ETC mechanisms for output feedback LTI systems that ensure the global asymptotic stability of the closed-loop system and reduce the data rate over the network.
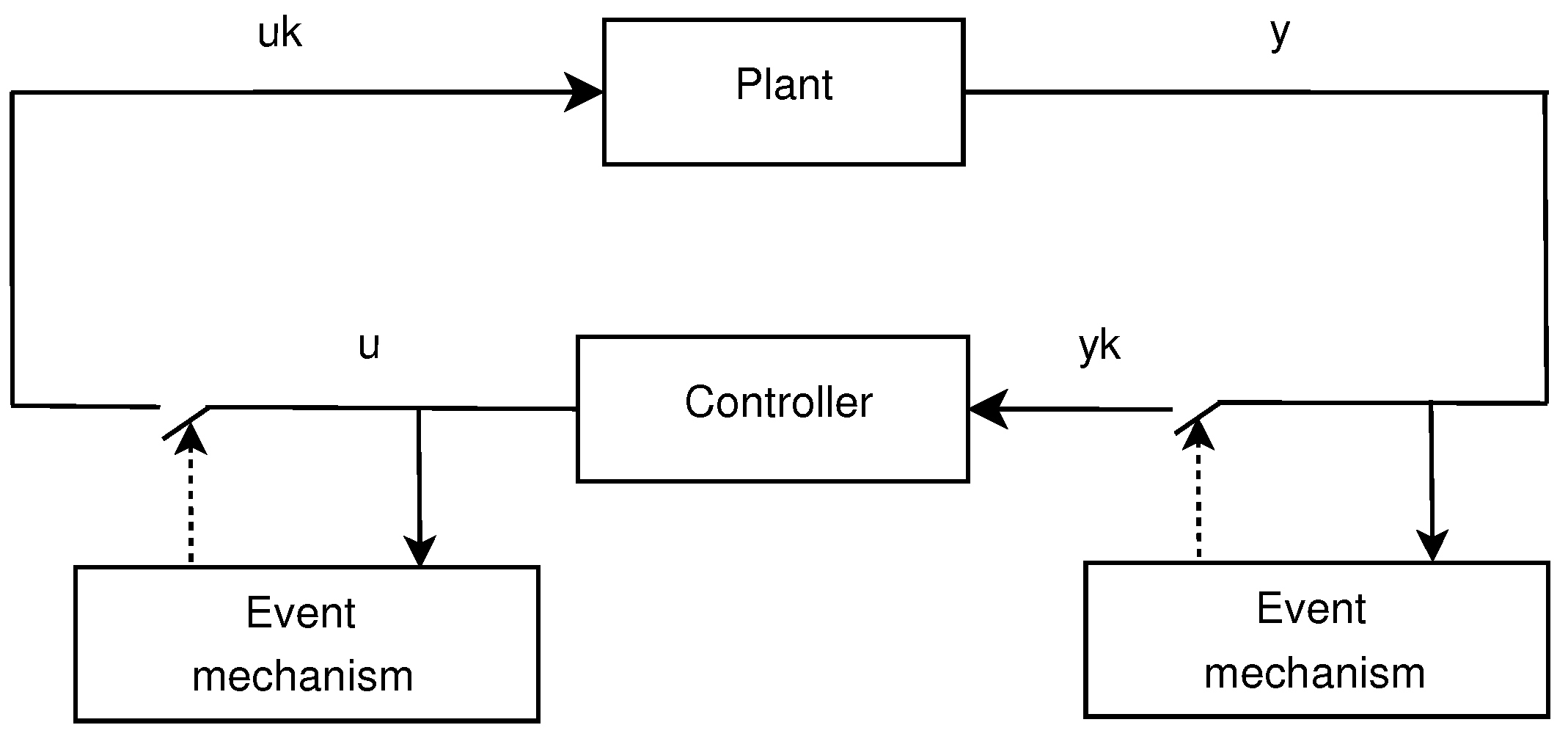
- The overall problem is modeled as a hybrid dynamical system to account for the existing dynamical phenomena.
- The design methodology is presented systemically by solving an LMI condition to facilitate the application of the proposed approach.
2. Related Work
3. Preliminaries
4. Problem Statement
5. Hybrid Dynamical Model
6. Design of the Event-Triggering Mechanism
7. Stability Result
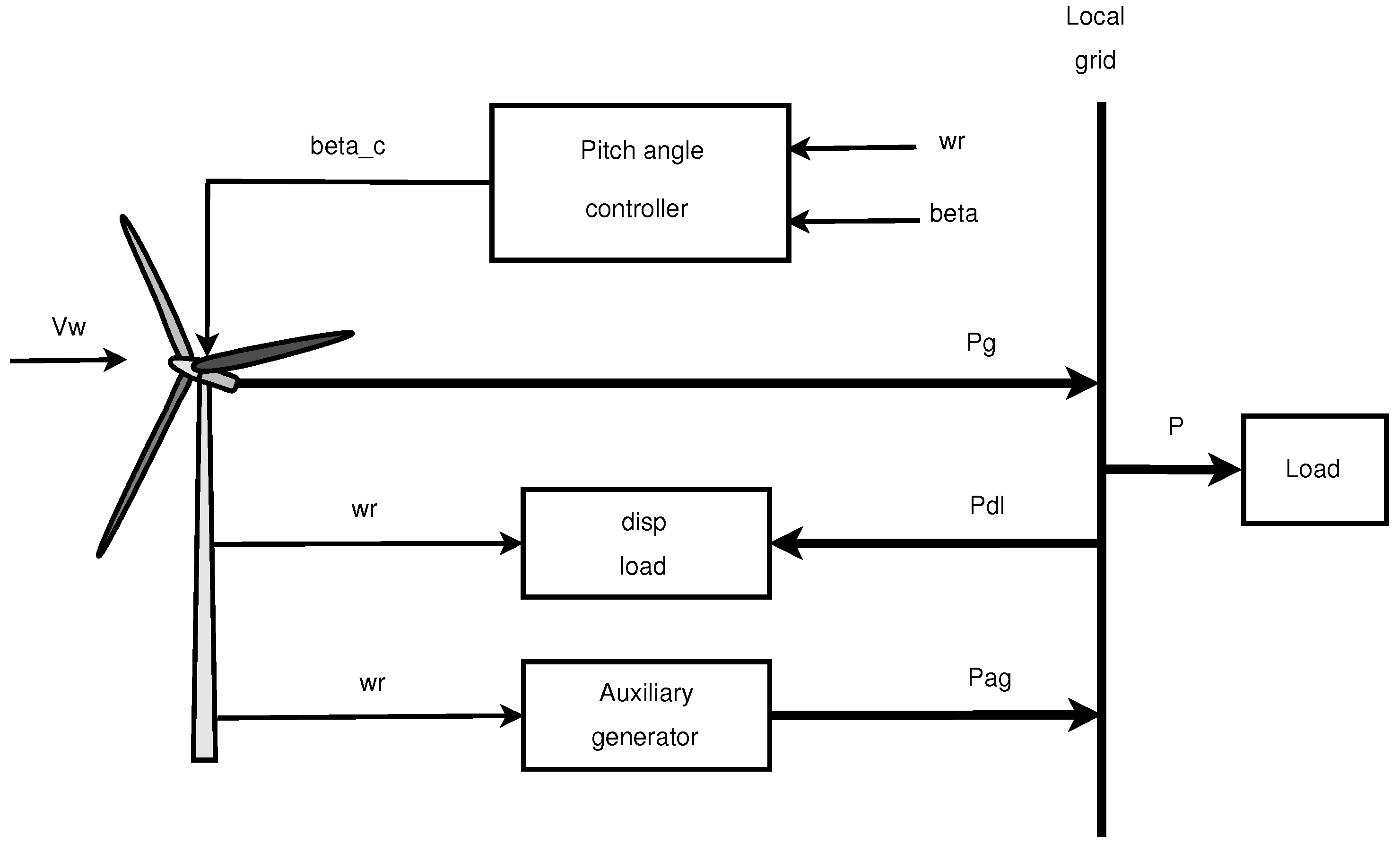
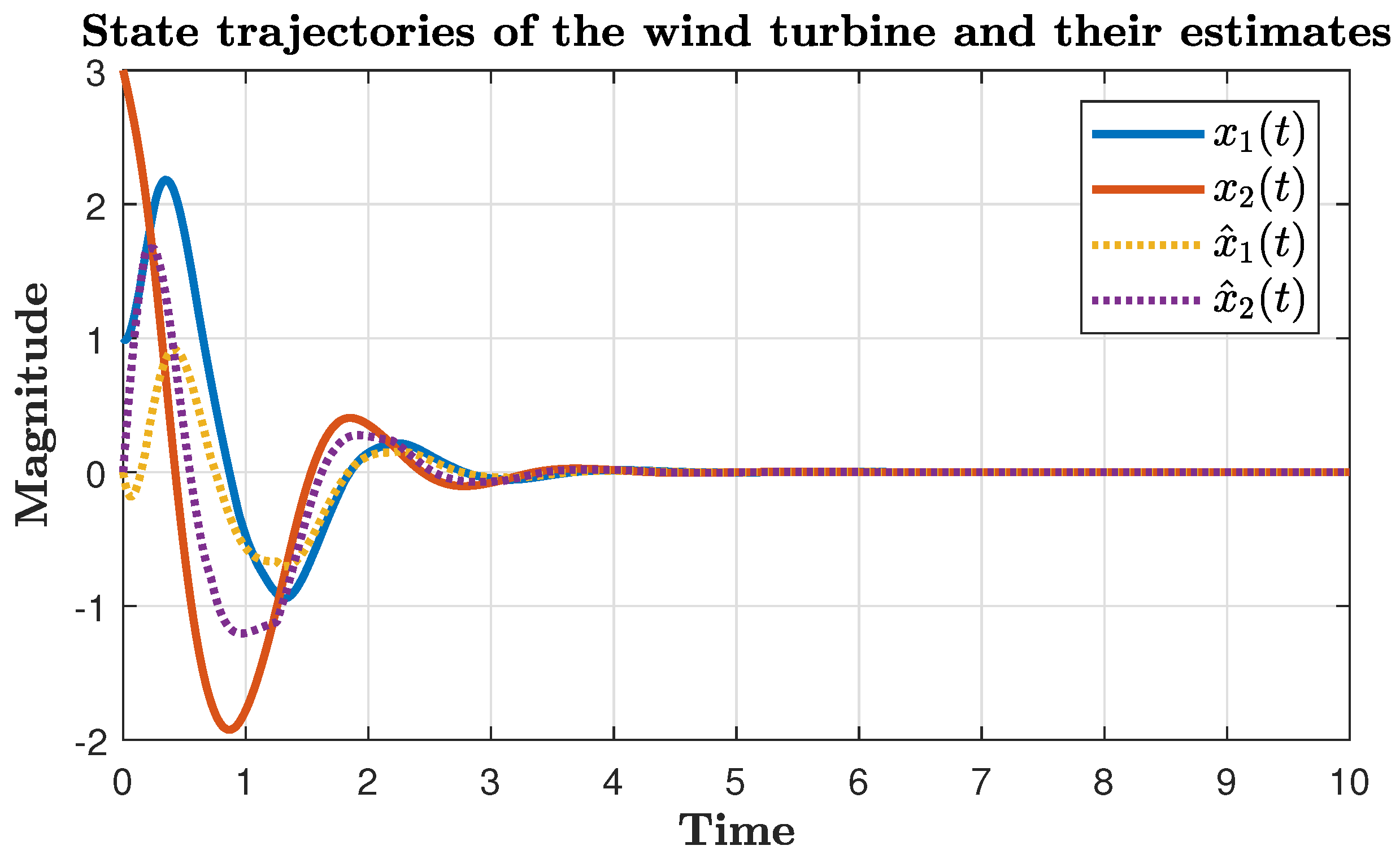
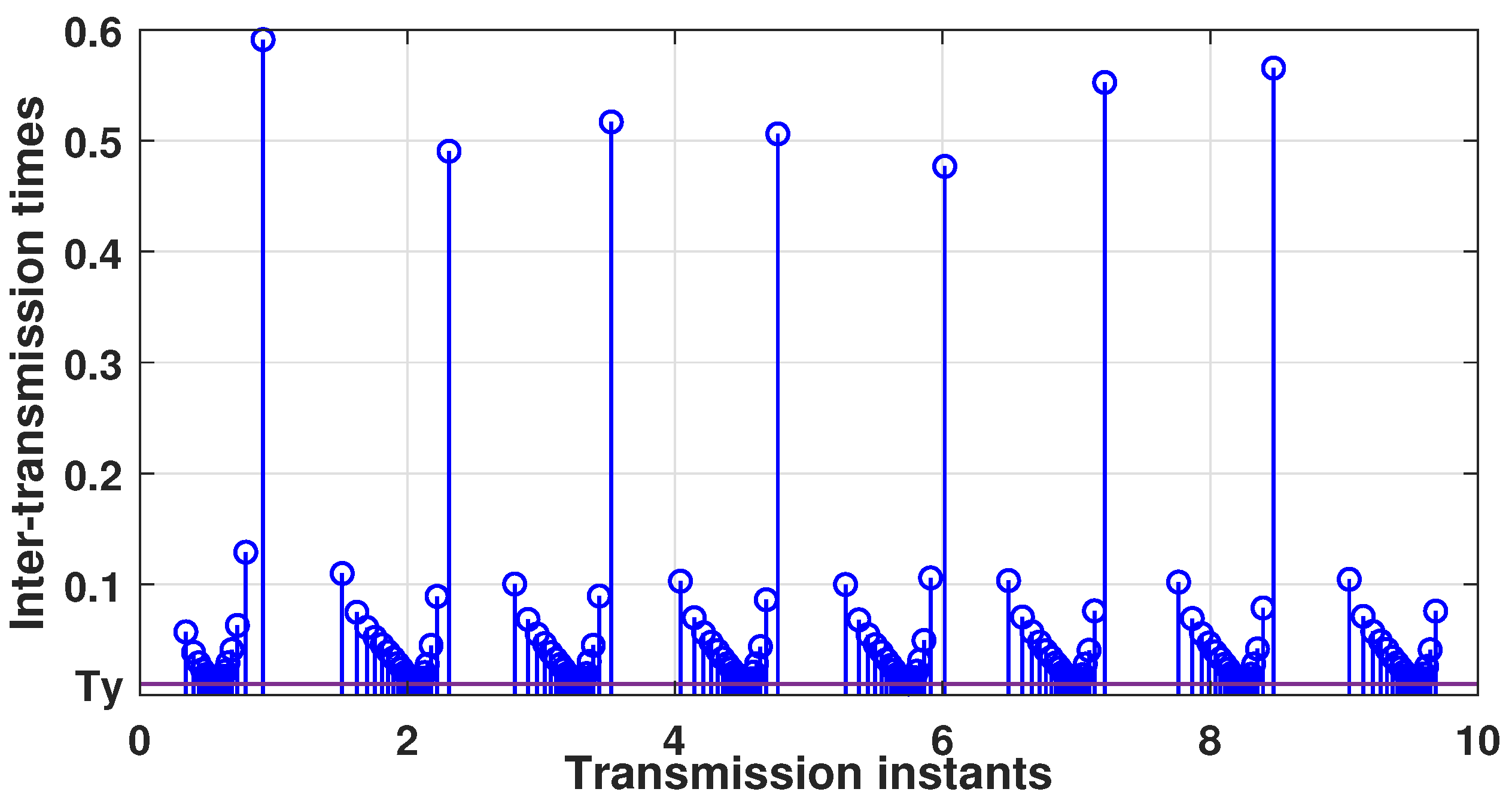
8. Illustrative Example
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ge, X.; Yang, F.; Han, Q. Distributed networked control systems: A brief overview. Inf. Sci. 2017, 380, 117–131. [Google Scholar] [CrossRef]
- Singh, A.; Singh, R.; Pal, B. Stability analysis of networked control in smart grids. IEEE Trans. Smart Grid 2015, 6, 381–390. [Google Scholar] [CrossRef]
- Filho, E.; Severino, R.; Santos, P.S.D.; Koubaa, A.; Tovar, E. Cooperative vehicular platooning: A multi-dimensional survey towards enhanced safety, security and validation. Cyber-Phys. Syst. 2023, 10, 123–175. [Google Scholar] [CrossRef]
- Alajmi, M.; Nour, M.; Hassine, S.; Alkhonaini, M.; Hamza, M.; Yaseen, I.; Zamani, A.; Rizwanullah, M. Energy Aware Secure Cyber-Physical Systems with Clustered Wireless Sensor Networks. Comput. Mater. Contin. 2022, 72, 5499–5513. [Google Scholar] [CrossRef]
- Samy, S.; Cao, Y.; Ramachandran, R.; Alzabut, J.; Niezabitowski, M.; Lim, C. Globally asymptotic stability and synchronization analysis of uncertain multi-agent systems with multiple time-varying delays and impulses. Int. J. Robust Nonlinear Control. 2022, 32, 737–773. [Google Scholar] [CrossRef]
- Baillieul, J.; Antsaklis, P. Control and communication challenges in networked real-time systems. Proc. IEEE 2007, 95, 9–28. [Google Scholar] [CrossRef]
- Chen, X.; Wang, Y.; Hu, S. Event-triggered quantized H∞ control for networked control systems in the presence of denial-of-service jamming attacks. Nonlinear Anal. Hybrid Syst. 2019, 33, 265–281. [Google Scholar] [CrossRef]
- Cloosterman, M.; Hetel, L.; van de Wouw, N.; Heemels, W.; Daafouz, J.; Nijmeijer, H. Controller synthesis for networked control systems. Automatica 2010, 46, 1584–1594. [Google Scholar] [CrossRef]
- Tabuada, P. Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans. Autom. Control 2007, 52, 1680–1685. [Google Scholar] [CrossRef]
- Heemels, W.; Johansson, K.; Tabuada, P. An Introduction to Event-triggered and Self-triggered Control. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 3270–3285. [Google Scholar]
- Åström, K.; Bernhardsson, B. Comparison of Riemann and Lebesgue sampling for first order stochastic systems. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; Volume 2, pp. 2011–2016. [Google Scholar]
- Aranda-Escolástico, E.; Guinaldo, M.; Miśkowicz, M.; Dormido, S. Event-Based Control in Industry Practice: Paving the Way Toward Resource-Efficient Industrial Internet of Things. IEEE Ind. Electron. Mag. 2024, 18, 38–47. [Google Scholar] [CrossRef]
- Postoyan, R.; Anta, A.; Nešić, D.; Tabuada, P. A unifying Lyapunov-based framework for the event-triggered control of nonlinear systems. In Proceedings of the IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 2559–2564. [Google Scholar]
- Postoyan, R.; Tabuada, P.; Nešić, D.; Anta, A. A Framework for the Event-Triggered Stabilization of Nonlinear Systems. IEEE Trans. Autom. Control 2015, 60, 982–996. [Google Scholar] [CrossRef]
- Behera, A.K.; Bandyopadhyay, B.; Cucuzzella, M.; Ferrara, A.; Yu, X. A Survey on Event-Triggered Sliding Mode Control. IEEE J. Emerg. Sel. Top. Ind. Electron. 2021, 2, 206–217. [Google Scholar] [CrossRef]
- Song, C.; Wang, H.; Tian, Y.; Christov, N. Event-triggered PCS Based Trajectory Tracking Control of Systems with Perturbation. Asian J. Control 2017, 19, 1173–1188. [Google Scholar] [CrossRef]
- Wu, J.; Peng, C.; Yang, H.; Wang, Y. Recent advances in event-triggered security control of networked systems: A survey. Int. J. Syst. Sci. 2022, 53, 2624–2643. [Google Scholar] [CrossRef]
- Han, Y.; Li, J.; Wang, B. Event-Triggered Active Disturbance Rejection Control for Hybrid Energy Storage System in Electric Vehicle. IEEE Trans. Transp. Electrif. 2023, 9, 75–86. [Google Scholar] [CrossRef]
- Li, B.; Hu, S.; Zhong, Q.; Shi, K.; Zhong, S. Dynamic memory event-triggered proportional-integral-based H∞ load frequency control for multi-area wind power systems. Appl. Math. Comput. 2023, 453, 128070. [Google Scholar] [CrossRef]
- Abdelrahim, M.; Postoyan, R.; Daafouz, J.; Nešić, D. Robust event-triggered output feedback controllers for nonlinear systems. Automatica 2017, 75, 96–108. [Google Scholar] [CrossRef]
- Yu, H.; Chen, T. A new Zeno-free event-triggered scheme for robust distributed optimal coordination. Automatica 2021, 129, 109639. [Google Scholar] [CrossRef]
- Miskowicz, M. Send-on-delta concept: An event-based data reporting strategy. Sensors 2006, 6, 49–63. [Google Scholar] [CrossRef]
- Suh, Y. Send-On-Delta sensor data transmission with a linear predictor. Sensors 2007, 7, 537–547. [Google Scholar] [CrossRef]
- Saxena, S.; Fridman, E. Event-Triggered Load Frequency Control via Switching Approach. IEEE Trans. Power Syst. 2020, 35, 4484–4494. [Google Scholar] [CrossRef]
- Abdelrahim, M.; Postoyan, R.; Daafouz, J.; Nešić, D. Stabilization of nonlinear systems using event-triggered output feedback controllers. IEEE Trans. Autom. Control 2016, 61, 2682–2687. [Google Scholar] [CrossRef]
- Heemels, W.; Donkers, M.; Teel, A. Periodic Event-Triggered Control Based on State Feedback. In Proceedings of the IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 2571–2576. [Google Scholar]
- Heemels, W.; Donkers, M.; Teel, A. Periodic Event-Triggered Control for Linear Systems. IEEE Trans. Autom. Control 2013, 58, 847–861. [Google Scholar] [CrossRef]
- Antunes, D.; Heemels, W.; Tabuada, P. Dynamic Programming Formulation of Periodic Event-Triggered Control: Performance Guarantees and Co-Design. In Proceedings of the 51st IEEE Conference on Decision and Control, Maui, HI, USA, 10–13 December 2012; pp. 7212–7217. [Google Scholar]
- Behera, A.K.; Bandyopadhyay, B.; Yu, X. Periodic event-triggered sliding mode control. Automatica 2018, 96, 61–72. [Google Scholar] [CrossRef]
- Li, C.; Zhao, X.; Chen, M.; Xing, W.; Zhao, N.; Zong, G. Dynamic Periodic Event-Triggered Control for Networked Control Systems Under Packet Dropouts. IEEE Trans. Autom. Sci. Eng. 2024, 21, 906–920. [Google Scholar] [CrossRef]
- Li, C.; Zhao, X.; Wu, C.; Liu, L.; Zhao, N. Periodic event-triggered dynamic output feedback control for networked control systems subject to packet dropouts. ISA Trans. 2023, 140, 97–108. [Google Scholar] [CrossRef]
- Sun, J.; Zeng, Z. Periodic Event-Triggered Control for Networked Control Systems With External Disturbance and Input and Output Delays. IEEE Trans. Cybern. 2022, 53, 6386–6394. [Google Scholar] [CrossRef]
- Dhullipalla, M.H.; Yu, H.; Chen, T. A framework for distributed control via dynamic periodic event-triggering mechanisms. Automatica 2022, 146, 110548. [Google Scholar] [CrossRef]
- Fu, A.; Mazo, M., Jr. Decentralized periodic event-triggered control with quantization and asynchronous communication. Automatica 2018, 94, 294–299. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Memon, A. Asynchronous sampled-data approach for event-triggered systems. Int. J. Control 2017, 90, 2508–2516. [Google Scholar] [CrossRef]
- Girard, A. Dynamic triggering mechanisms for event-triggered control. IEEE Trans. Autom. Control 2015, 60, 1992–1997. [Google Scholar] [CrossRef]
- Dolk, V.; Borgers, D.; Heemels, W. Dynamic Event-triggered Control: Tradeoffs Between Transmission Intervals and Performance. In Proceedings of the IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 2764–2769. [Google Scholar]
- Dolk, V.; Borgers, D.; Heemels, W. Output-based and decentralized dynamic event-triggered control with guaranteed Lp-gain performance and Zeno-freeness. IEEE Trans. Autom. Control 2017, 62, 34–49. [Google Scholar] [CrossRef]
- Tan, Y.; Yuan, Y.; Xie, X.; Niu, B. Dynamic event-triggered security control for networked T-S fuzzy system with non-uniform sampling. Fuzzy Sets Syst. 2023, 452, 91–109. [Google Scholar] [CrossRef]
- Mazo, M., Jr.; Cao, M. Asynchronous decentralized event-triggered control. Automatica 2014, 50, 3197–3203. [Google Scholar] [CrossRef]
- Liu, D.; Yang, G.H.; Er, M.J. Event-Triggered Control for T–S Fuzzy Systems Under Asynchronous Network Communications. IEEE Trans. Fuzzy Syst. 2020, 28, 390–399. [Google Scholar] [CrossRef]
- Tallapragada, P.; Chopra, N. Event-triggered dynamic output feedback control for LTI systems. In Proceedings of the 51st IEEE Conference on Decision and Control, Maui, HI, USA, 10–13 December 2012; pp. 6597–6602. [Google Scholar]
- Guo, Y.; Fang, X.; Fan, Y. Asynchronous dynamic event-triggered control for network systems with dual triggers. IET Control Theory Appl. 2023, 17, 1625–1636. [Google Scholar] [CrossRef]
- Li, L.; Song, L.; Li, T.; Fu, J. Event-Triggered Output Regulation for Networked Flight Control System Based on an Asynchronous Switched System Approach. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7675–7684. [Google Scholar] [CrossRef]
- Berkel, F.; Liu, S. An Event-Triggered Output-Based Model Predictive Control Strategy. IEEE Trans. Control Netw. Syst. 2019, 6, 822–832. [Google Scholar] [CrossRef]
- Fei, Z.; Guan, C.; Zhao, X. Event-Triggered Dynamic Output Feedback Control for Switched Systems With Frequent Asynchronism. IEEE Trans. Autom. Control 2020, 65, 3120–3127. [Google Scholar] [CrossRef]
- Guan, Y.; Han, Q.L.; Ge, X. On asynchronous event-triggered control of decentralized networked systems. Inf. Sci. 2018, 425, 127–139. [Google Scholar] [CrossRef]
- Wang, J.; Ru, T.; Xia, J.; Shen, H.; Sreeram, V. Asynchronous Event-Triggered Sliding Mode Control for Semi-Markov Jump Systems Within a Finite-Time Interval. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 458–468. [Google Scholar] [CrossRef]
- Goebel, R.; Sanfelice, R.; Teel, A. Hybrid Dynamical Systems: Modeling, Stability, and Robustness; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Nešić, D.; Teel, A.; Carnevale, D. Explicit Computation of the Sampling Period in Emulation of Controllers for Nonlinear Sampled-Data Systems. IEEE Trans. Autom. Control 2009, 54, 619–624. [Google Scholar] [CrossRef]
- Cai, C.; Teel, A. Robust Input-to-State Stability for Hybrid Systems. SIAM J. Control Optim. 2013, 51, 1651–1678. [Google Scholar] [CrossRef]
- Nešić, D.; Teel, A.; Valmorbida, G.; Zaccarian, L. Finite-gain Lp stability for hybrid dynamical systems. Automatica 2013, 49, 2384–2396. [Google Scholar] [CrossRef]
- Sanfelice, R.; Copp, D.; Ñanñez, P. A Toolbox for Simulation of Hybrid Systems in Matlab/Simulink: Hybrid Equations (HyEQ) Toolbox. In Proceedings of the Hybrid Systems: Computation and Control Conference, Philadelphia, PA, USA, 8–11 April 2013; pp. 101–110. [Google Scholar]
- Abdelrahim, M.; Postoyan, R.; Daafouz, J.; Nešić, D. Stabilization of nonlinear systems using event-triggered output feedback laws. In Proceedings of the 21th International Symposium on Mathematics Theory of Networks and Systems, Groningen, The Netherlands, 7–11 July 2014; pp. 274–281. [Google Scholar]
- Forni, F.; Galeani, S.; Nešić, D.; Zaccarian, L. Event-triggered transmission for linear control over communication channels. Automatica 2014, 50, 490–498. [Google Scholar] [CrossRef]
- Fazeli, M.; Asher, G.; Klumpner, C.; Yao, L. Novel integration of DFIG-based wind generators within microgrids. IEEE Trans. Energy Convers. 2011, 26, 840–850. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [40] | [41] | [42] | [43] | Proposed Approach | |
|---|---|---|---|---|---|
| Plant Dynamics | nonlinear | T-S Fuzzy | LTI | LTI | LTI |
| Controller | state feedback | output feedback | output feedback | output feedback | output feedback |
| Modeling | continuous | continuous | continuous | continuous | hybrid |
| ETC mechanism | static | static | static | static | dynamic |
| Stability | practical | asymptotic | asymptotic | asymptotic | asymptotic |
| ETC performance compared to periodic | – | – | – | – | better performance ensured |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelrahim, M.; Almakhles, D. Dynamic Event-Triggered Control for Sensor–Controller–Actuator Networked Control Systems. J. Sens. Actuator Netw. 2024, 13, 61. https://doi.org/10.3390/jsan13050061
Abdelrahim M, Almakhles D. Dynamic Event-Triggered Control for Sensor–Controller–Actuator Networked Control Systems. Journal of Sensor and Actuator Networks. 2024; 13(5):61. https://doi.org/10.3390/jsan13050061
Chicago/Turabian StyleAbdelrahim, Mahmoud, and Dhafer Almakhles. 2024. "Dynamic Event-Triggered Control for Sensor–Controller–Actuator Networked Control Systems" Journal of Sensor and Actuator Networks 13, no. 5: 61. https://doi.org/10.3390/jsan13050061
APA StyleAbdelrahim, M., & Almakhles, D. (2024). Dynamic Event-Triggered Control for Sensor–Controller–Actuator Networked Control Systems. Journal of Sensor and Actuator Networks, 13(5), 61. https://doi.org/10.3390/jsan13050061