

Tool Condition Monitoring in the Milling Process Using Deep Learning and Reinforcement Learning

 ,
,  ,
,  , and
, and 
Abstract
1. Introduction
- RQ1: Study the effect of tool wear on vibration signals.
- RQ2: Analyze the performance of DL and RL for TCM applications.
2. Materials and Methods
2.1. Workpiece Material
2.2. Cutting Tools
2.3. Measurement
2.4. Decision-Making Algorithm
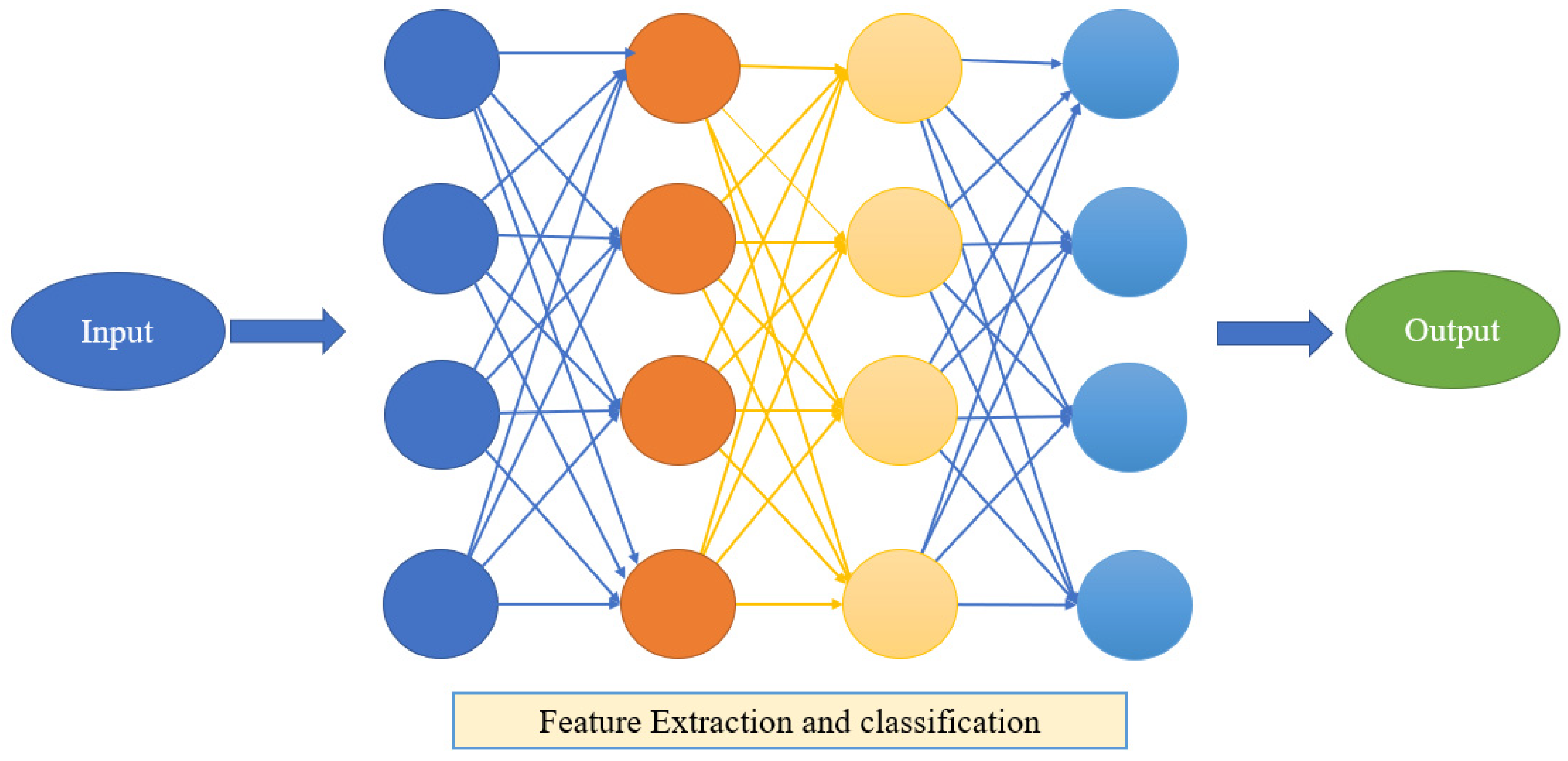
2.5. Deep Learning (DL)
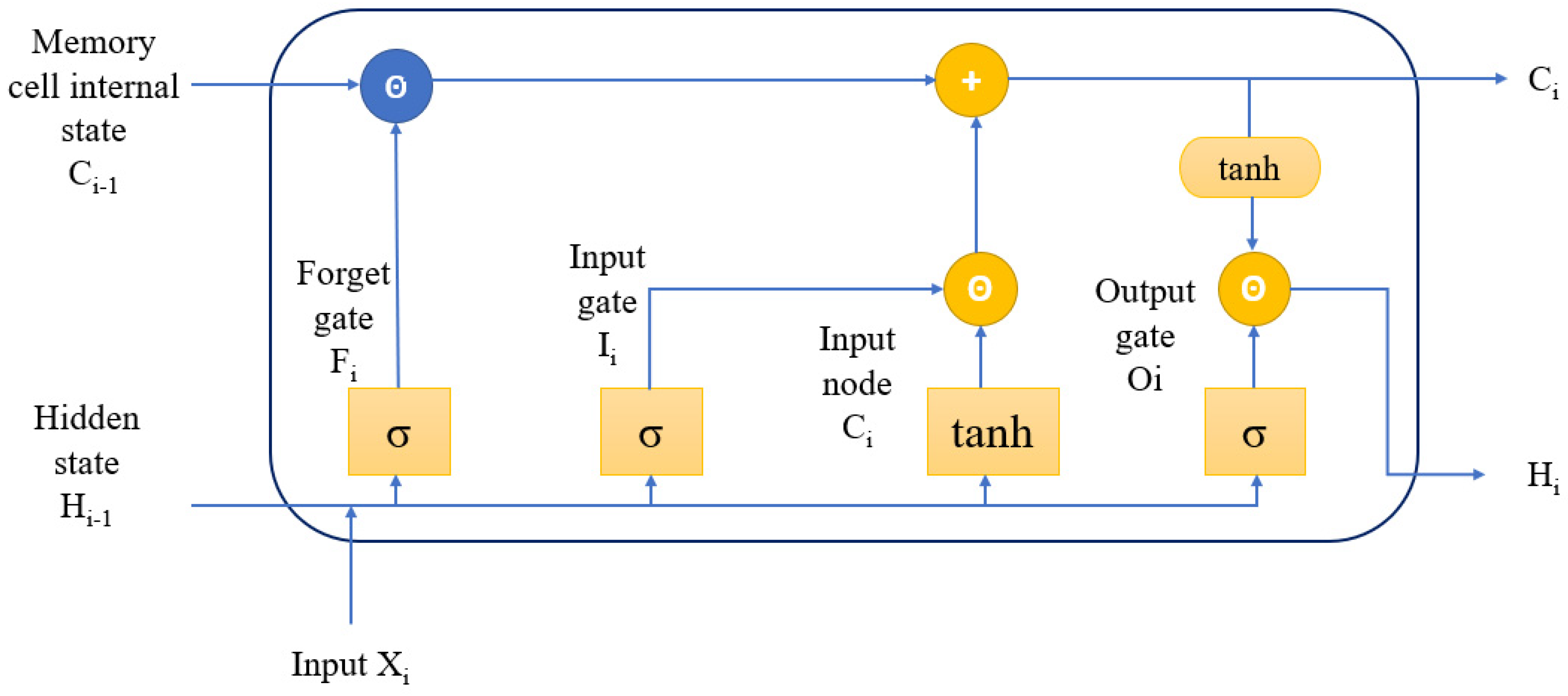
2.6. Long Short-Term Memory (LSTM)
2.7. Feed Forward Neural Network (FFNN)
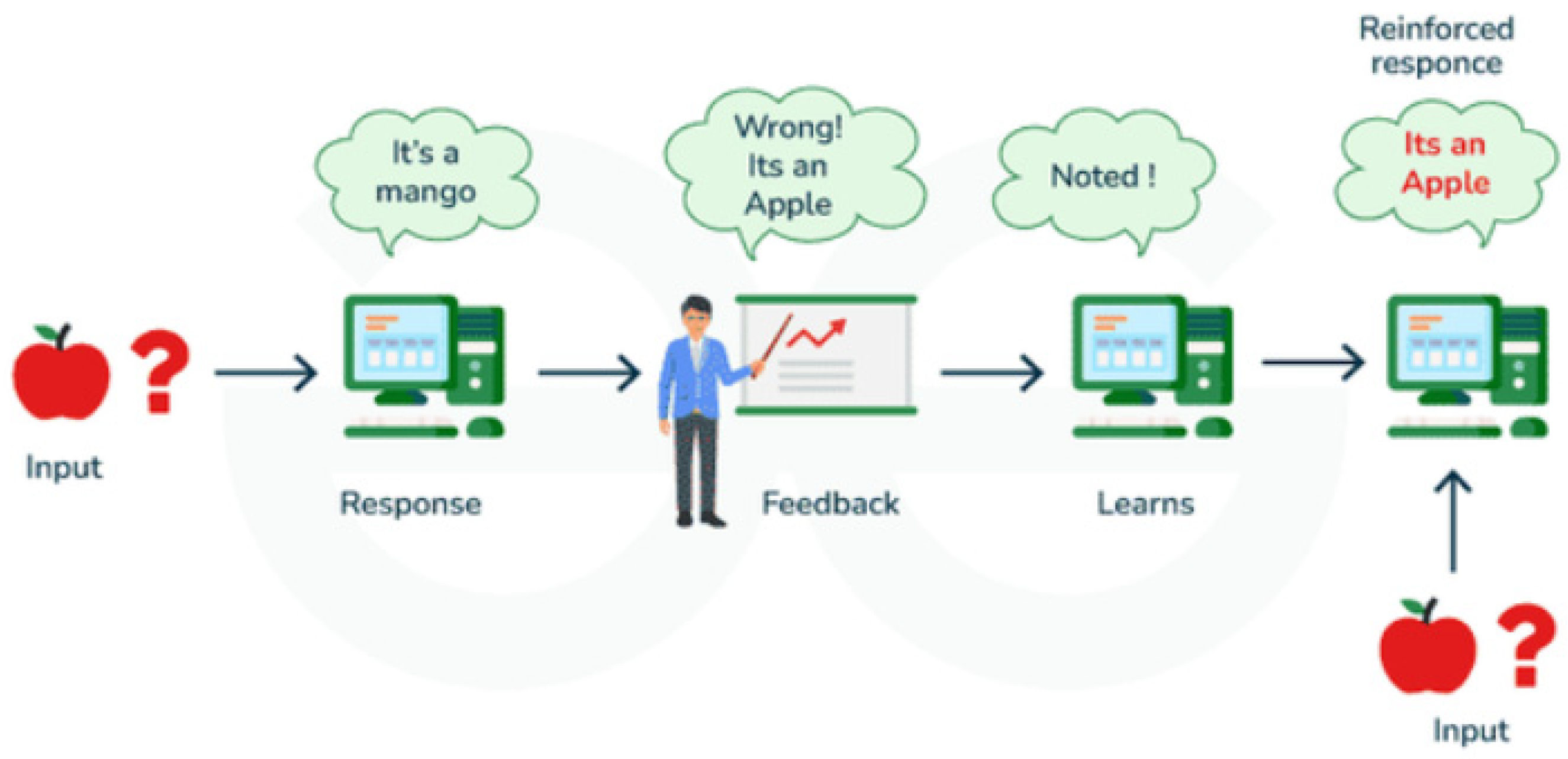
2.8. Reinforcement Learning (RL)
- ➢
- An agent interacts with its surroundings after being trained by a goal-oriented algorithm.
- ➢
- A state, represented by the symbol “st”, is the data gathered from the surroundings.
- ➢
- An award is represented by the symbol “rt” and is the result of an agent’s interaction with the environment, either positive or negative.
- ➢
- A behavior is an agent’s manner of moving that is expressed as “at” and is determined by the information they have gathered from their surroundings.
- ➢
- The agent observes the given environment.
2.9. Q-Learning
2.10. SARSA
2.11. Performance Metrics
3. Results and Discussion
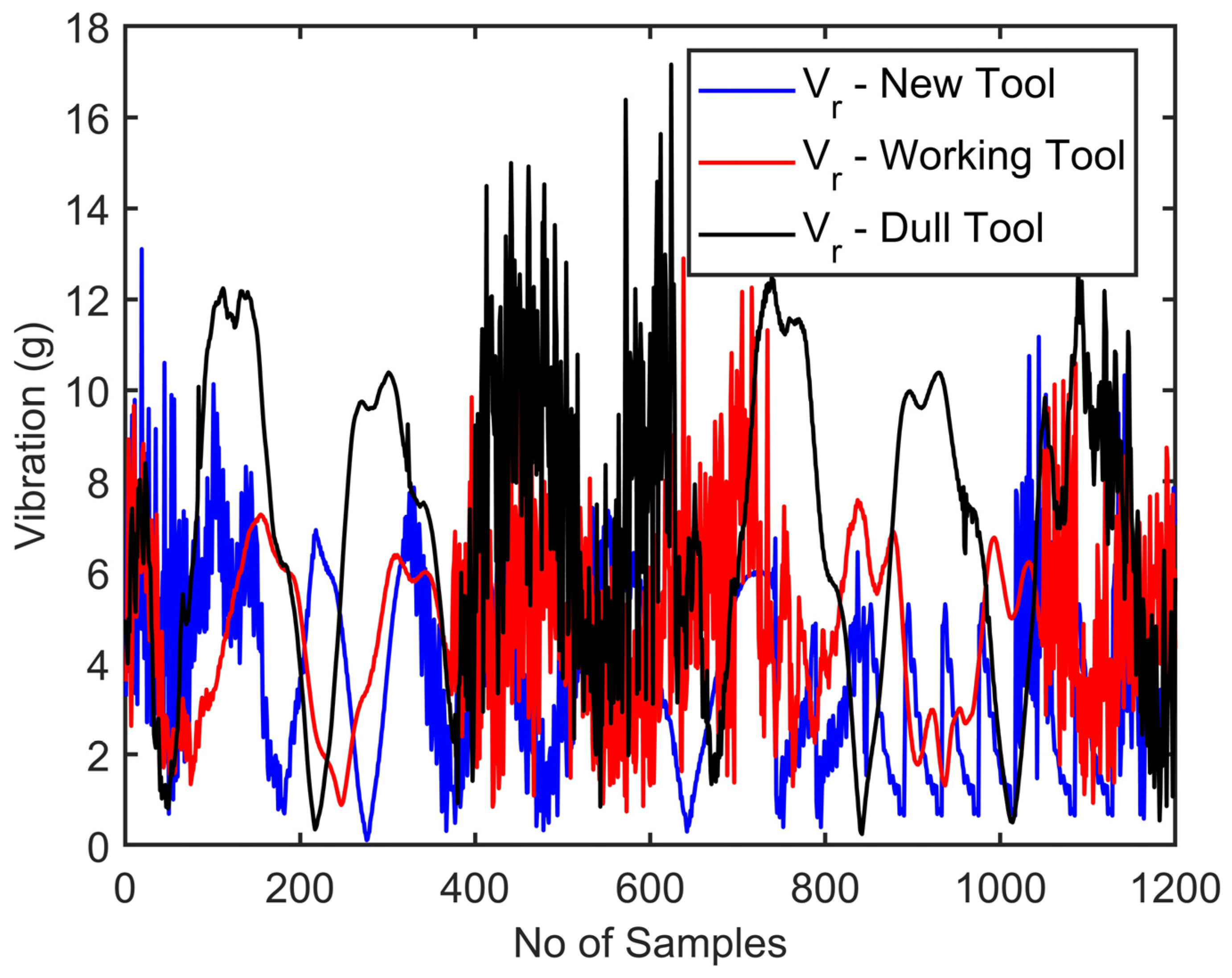
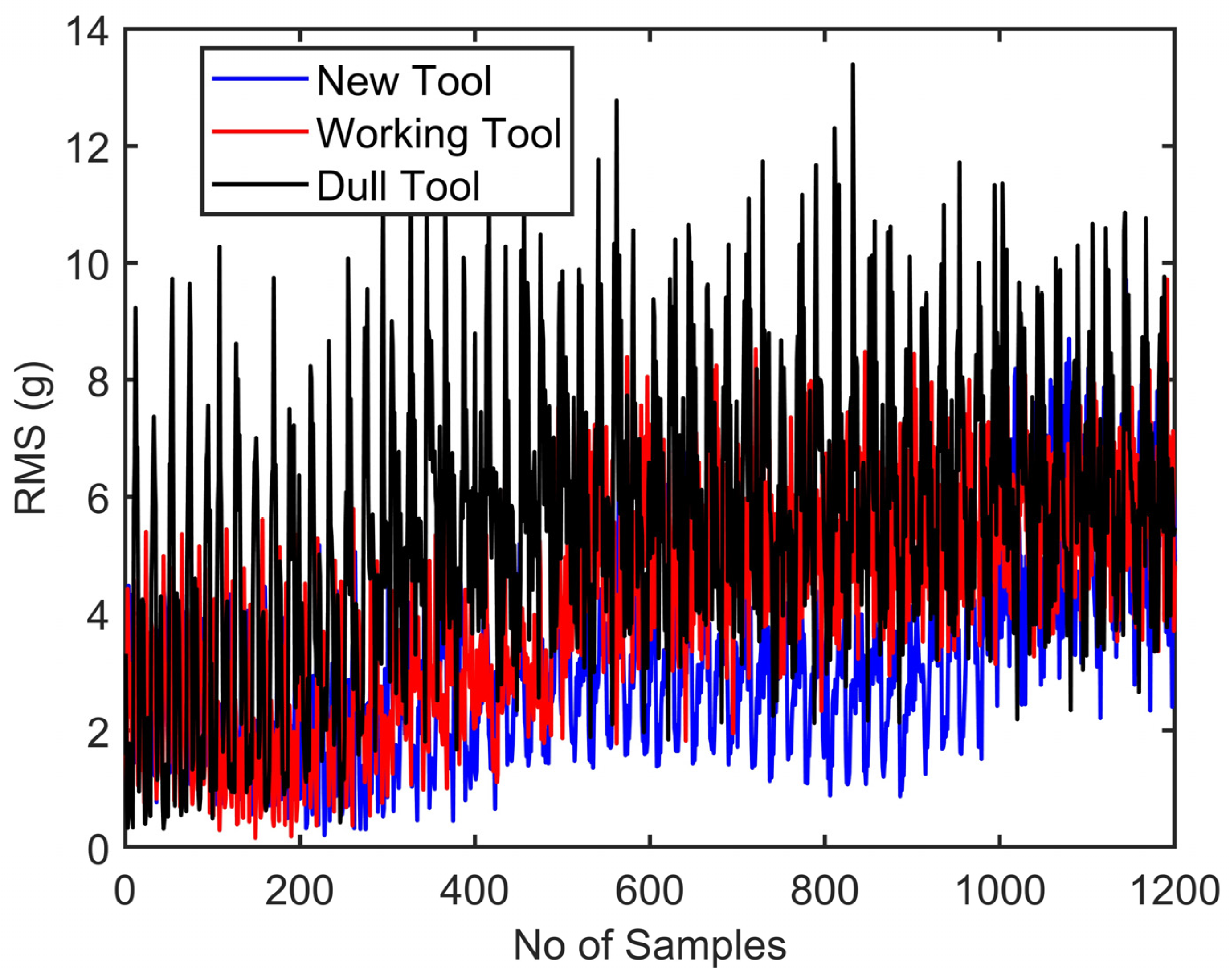
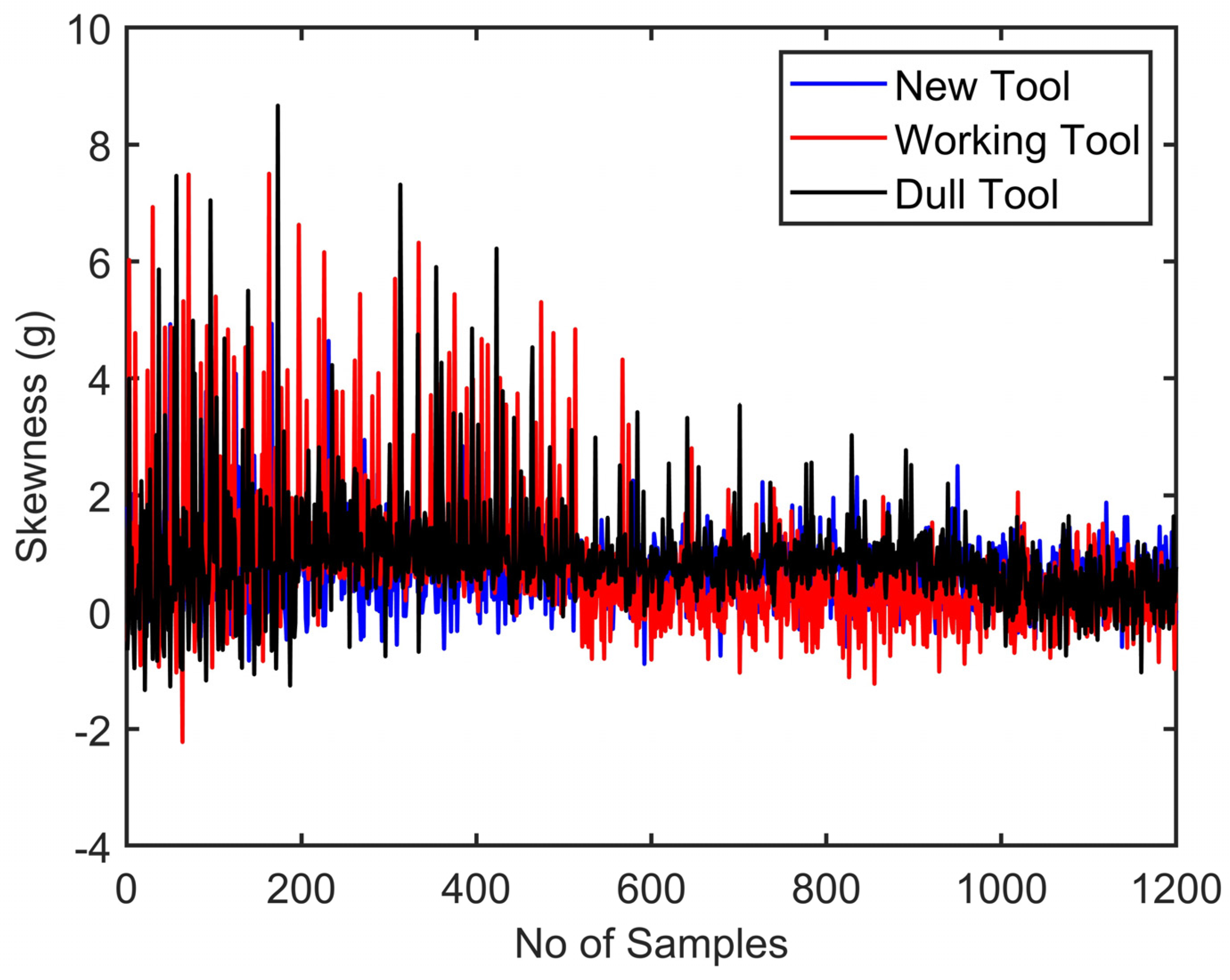
3.1. RQ1: Study the Effect of Tool Wear on Vibration Signals
Effect of Flank Wear on Vibration Signals
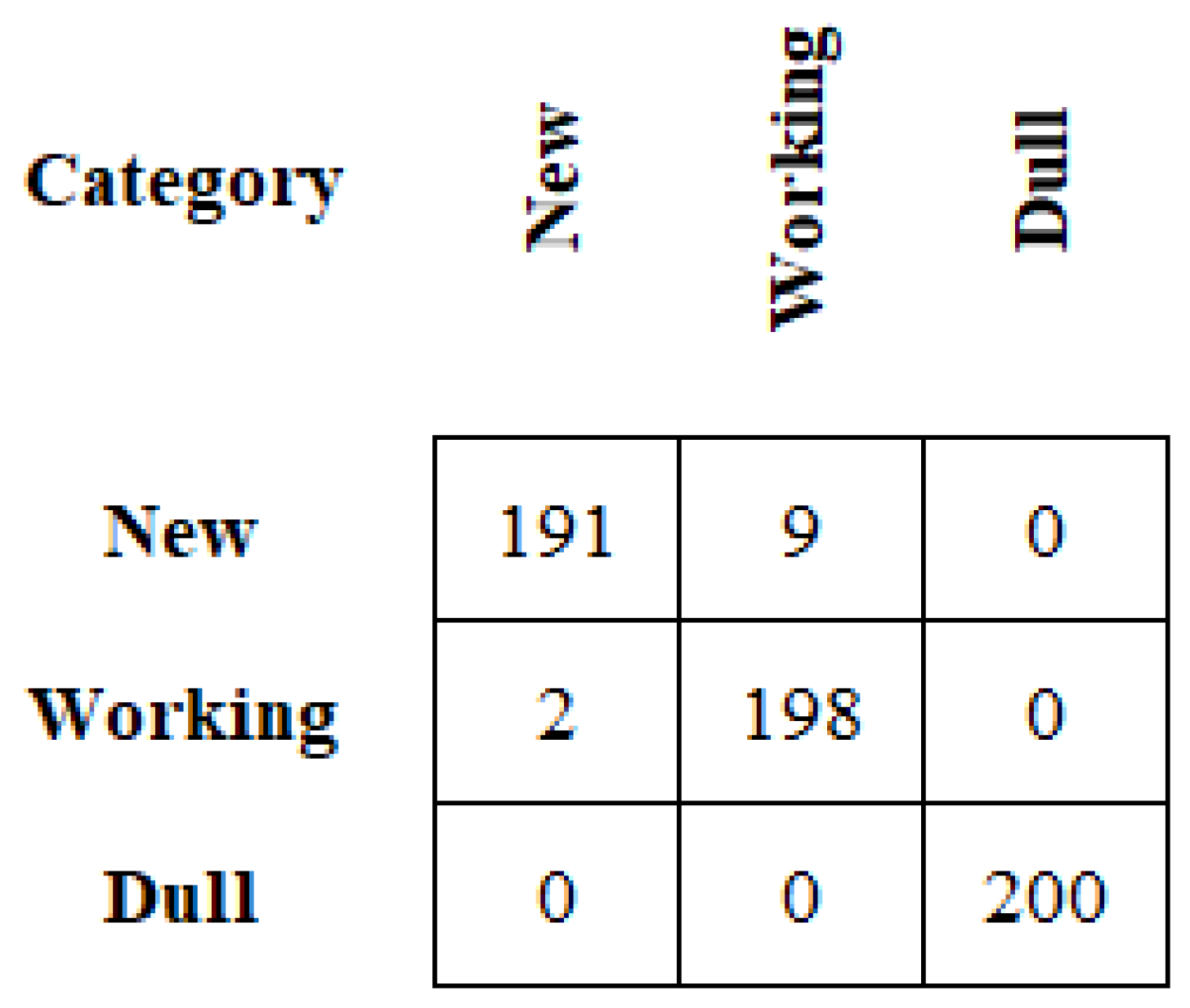
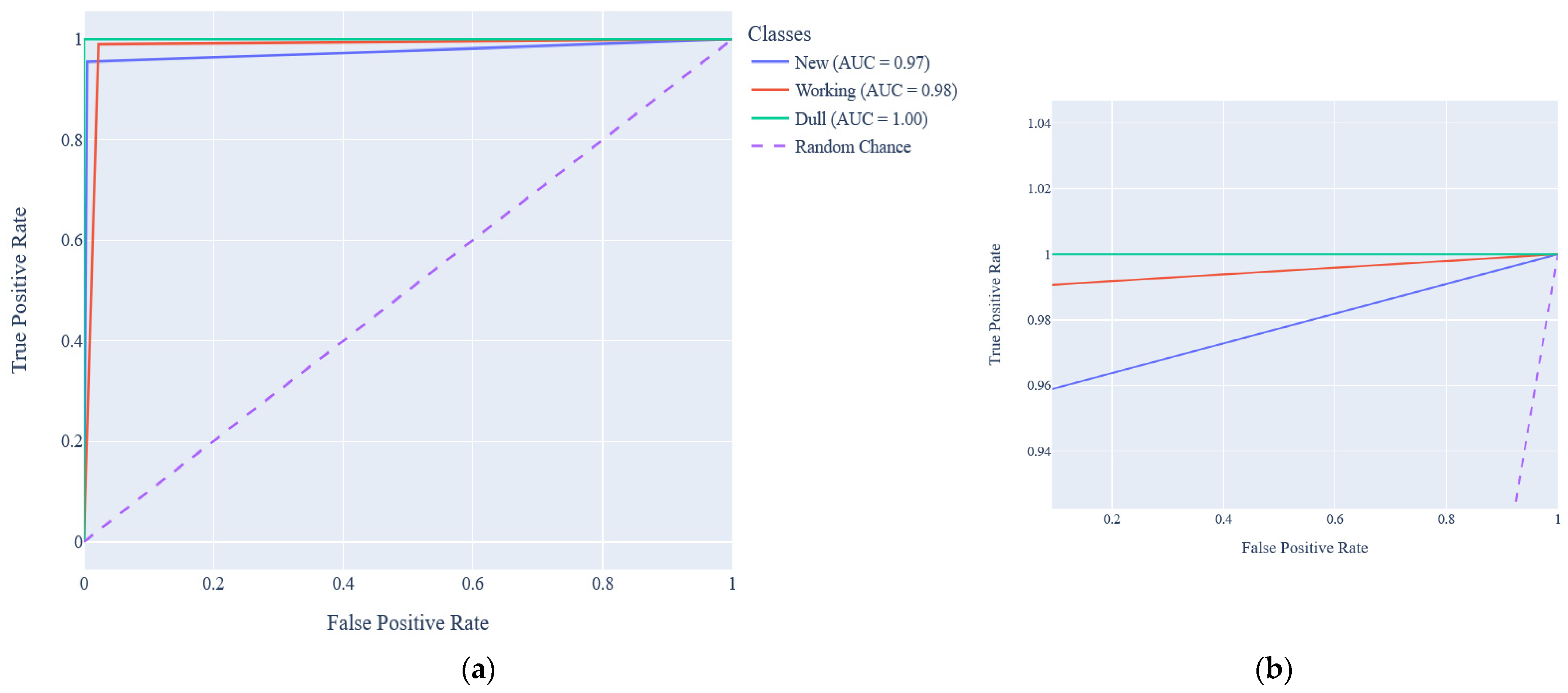
3.2. RQ2: Analyze the Performance of DL and RL for TCM Applications
3.2.1. TCM Using DL Models
3.2.2. Feedforward Neural Network
3.2.3. TCM Using RL Models
Q-Learning
3.2.4. SARSA
3.3. Research Implications
- ➢
- Advancement in Predictive Maintenance: The DL and RL algorithms for TCM significantly enhance predictive maintenance strategies. High accuracy in the prediction of tool condition and failure enables prompt maintenance, decreasing downtime and increasing tool life. This may result in lower production costs, more effective manufacturing techniques, and higher-quality products. Industries can optimize their operations by switching from reactive to proactive maintenance.
- ➢
- Real-Time Monitoring and Decision Making: RL enables dynamic decision-making capabilities for TCMs. This dynamic approach can handle the variability in milling processes more effectively than static models. This adaptability can lead to increased productivity and the ability to handle customized production requirements.
- ➢
- Integration with Industry 4.0: By combining TCM with other Industry 4.0 technologies, like digital twins, cyber-physical systems, and the Industrial Internet of Things (IIoT), manufacturing environments can become more intelligent and networked. The development of “smart factories” where equipment can automatically check on itself, anticipate problems, and plan maintenance without human assistance may result from this integration.
4. Conclusions
- ➢
- The tool wear has a substantial effect on vibration signals. When the tool loses its effectiveness at the cutting edge, it increases the tool-workpiece contact area and considerably increases the vibration amplitude.
- ➢
- DL algorithms such as LSTM and FFNN yielded a classification accuracy of 94.85% and 98.16%, respectively.
- ➢
- RL algorithms namely Q-learning and SARSA yielded a classification accuracy of 98.5% and 98.66% respectively.
- ➢
- The SARSA RL model performed better than other models in terms of classification accuracy, precision, recall, and F1 score.
- ➢
- The results obtained from the performance metrics indicated the superior performance of RL compared to DL due to the balancing mechanism for exploration and exploitation.
- ➢
- This balance is crucial in discovering effective tool conditions and avoiding premature convergence to suboptimal solutions.
- ➢
- The on-policy learning algorithm of SARSA through interaction with the environment ensures that the learning process is consistent with the actions being taken, which can be particularly useful in TCM applications.
- ➢
- RL algorithms have been recognized as an efficient model for TCM applications due to their learning behavior.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mohanraj, T.; Kirubakaran, E.S.; Madheswaran, D.K.; Naren, M.L.; Suganithi Dharshan, P.; Ibrahim, M. Review of advances in tool condition monitoring techniques in the milling process. Meas. Sci. Technol. 2024, 35, 092002. [Google Scholar]
- Mohanraj, T.; Shankar, S.; Rajasekar, R.; Sakthivel, N.; Pramanik, A. Tool condition monitoring techniques in milling process—A review. J. Mater. Res. Technol. 2020, 9, 1032–1042. [Google Scholar] [CrossRef]
- Kurada, S.; Bradley, C. A review of machine vision sensors for tool condition monitoring. Comput. Ind. 1997, 34, 55–72. [Google Scholar] [CrossRef]
- Wang, M.; Zhou, J.; Gao, J.; Li, Z.; Li, E. Milling tool wear prediction method based on deep learning under variable working conditions. IEEE Access 2020, 8, 140726–140735. [Google Scholar] [CrossRef]
- Mohanraj, T.; Yerchuru, J.; Krishnan, H.; Aravind, R.N.; Yameni, R. Development of tool condition monitoring system in end milling process using wavelet features and Hoelder’s exponent with machine learning algorithms. Measurement 2021, 173, 108671. [Google Scholar] [CrossRef]
- Chennai Viswanathan, P.; Venkatesh, S.N.; Dhanasekaran, S.; Mahanta, T.K.; Sugumaran, V.; Lakshmaiya, N.; Paramasivam, P.; Nanjagoundenpalayam Ramasamy, S. Deep learning for enhanced fault diagnosis of monoblock centrifugal pumps: Spectrogram-based analysis. Machines 2023, 11, 874. [Google Scholar] [CrossRef]
- Shankar, S.; Mohanraj, T.; Rajasekar, R. Prediction of cutting tool wear during milling process using artificial intelligence techniques. Int. J. Comput. Integr. Manuf. 2019, 32, 174–182. [Google Scholar] [CrossRef]
- Nair, V.S.; Rameshkumar, K.; Saravanamurugan, S. Chatter Identification in Milling of Titanium Alloy Using Machine Learning Approaches with Non-Linear Features of Cutting Force and Vibration Signatures. Int. J. Progn. Health Manag. 2024, 15. [Google Scholar] [CrossRef]
- Zhou, Y.; Sun, W. Tool wear condition monitoring in milling process based on current sensors. IEEE Access 2020, 8, 95491–95502. [Google Scholar] [CrossRef]
- He, Z.; Shi, T.; Xuan, J.; Li, T. Research on tool wear prediction based on temperature signals and deep learning. Wear 2021, 478, 203902. [Google Scholar] [CrossRef]
- Abdeltawab, A.; Xi, Z.; Longjia, Z. Enhanced tool condition monitoring using wavelet transform-based hybrid deep learning based on sensor signal and vision system. Int. J. Adv. Manuf. Technol. 2024, 132, 5111–5140. [Google Scholar] [CrossRef]
- Mannan, M.; Mian, Z.; Kassim, A.A. Tool wear monitoring using a fast Hough transform of images of machined surfaces. Mach. Vis. Appl. 2004, 15, 156–163. [Google Scholar] [CrossRef]
- De Barrena, T.F.; Ferrando, J.L.; García, A.; Badiola, X.; de Buruaga, M.S.; Vicente, J. Tool remaining useful life prediction using bidirectional recurrent neural networks (BRNN). Int. J. Adv. Manuf. Technol. 2023, 125, 4027–4045. [Google Scholar] [CrossRef]
- Natarajan, S.; Thangamuthu, M.; Gnanasekaran, S.; Rakkiyannan, J. Digital twin-driven tool condition monitoring for the milling process. Sensors 2023, 23, 5431. [Google Scholar] [CrossRef] [PubMed]
- Gupta, M.K.; Korkmaz, M.E.; Yılmaz, H.; Şirin, Ş.; Ross, N.S.; Jamil, M.; Królczyk, G.M.; Sharma, V.S. Real-time monitoring and measurement of energy characteristics in sustainable machining of titanium alloys. Measurement 2024, 224, 113937. [Google Scholar] [CrossRef]
- Arendra, A.; Herianto, H.; Akhmad, S.; Lumintu, I. Dimensions Reduction of Vibration Signal Features Using LDA and PCA for Real Time Tool Wear Detection with Single Layer Perceptron. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2021. [Google Scholar]
- Gheisari, M.; Ebrahimzadeh, F.; Rahimi, M.; Moazzamigodarzi, M.; Liu, Y.; Dutta Pramanik, P.K.; Heravi, M.A.; Mehbodniya, A.; Ghaderzadeh, M.; Feylizadeh, M.R. Deep learning: Applications, architectures, models, tools, and frameworks: A comprehensive survey. CAAI Trans. Intell. Technol. 2023, 8, 581–606. [Google Scholar] [CrossRef]
- Hall, S.; Newman, S.T.; Loukaides, E.; Shokrani, A. ConvLSTM deep learning signal prediction for forecasting bending moment for tool condition monitoring. Procedia CIRP 2022, 107, 1071–1076. [Google Scholar] [CrossRef]
- Zhang, Q.; Xiao, J.; Tian, C.; Chun-Wei Lin, J.; Zhang, S. A robust deformed convolutional neural network (CNN) for image denoising. CAAI Trans. Intell. Technol. 2023, 8, 331–342. [Google Scholar] [CrossRef]
- Ross, N.S.; Shibi, C.S.; Mustafa, S.M.; Gupta, M.K.; Korkmaz, M.E.; Sharma, V.S.; Li, Z. Measuring Surface Characteristics in Sustainable Machining of Titanium Alloys Using Deep Learning-Based Image Processing. IEEE Sens. J. 2023, 23, 13629–13639. [Google Scholar] [CrossRef]
- Zhang, C.; Tan, K.C.; Li, H.; Hong, G.S. A cost-sensitive deep belief network for imbalanced classification. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 109–122. [Google Scholar] [CrossRef]
- Dou, J.; Xu, C.; Jiao, S.; Li, B.; Zhang, J.; Xu, X. An unsupervised online monitoring method for tool wear using a sparse auto-encoder. Int. J. Adv. Manuf. Technol. 2020, 106, 2493–2507. [Google Scholar] [CrossRef]
- Cai, W.; Zhang, W.; Hu, X.; Liu, Y. A hybrid information model based on long short-term memory network for tool condition monitoring. J. Intell. Manuf. 2020, 31, 1497–1510. [Google Scholar] [CrossRef]
- Ou, J.; Li, H.; Huang, G.; Liu, B.; Wang, Z. Tool Wear Recognition Based on Deep Kernel Autoencoder with Multichannel Signals Fusion. IEEE Trans. Instrum. Meas. 2021, 70, 1–9. [Google Scholar] [CrossRef]
- Liao, D.; Shi, C.; Wang, L. A complementary integrated Transformer network for hyperspectral image classification. CAAI Trans. Intell. Technol. 2023, 8, 1288–1307. [Google Scholar] [CrossRef]
- Ross, N.S.; Sheeba, P.T.; Shibi, C.S.; Gupta, M.K.; Korkmaz, M.E.; Sharma, V.S. A novel approach of tool condition monitoring in sustainable machining of Ni alloy with transfer learning models. J. Intell. Manuf. 2024, 35, 757–775. [Google Scholar] [CrossRef]
- Liu, X.; Liu, S.; Li, X.; Zhang, B.; Yue, C.; Liang, S.Y. Intelligent tool wear monitoring based on parallel residual and stacked bidirectional long short-term memory network. J. Manuf. Syst. 2021, 60, 608–619. [Google Scholar] [CrossRef]
- Chen, M.; Li, M.; Zhao, L.; Liu, J. Tool wear monitoring based on the combination of machine vision and acoustic emission. Int. J. Adv. Manuf. Technol. 2023, 125, 3881–3897. [Google Scholar] [CrossRef]
- Cao, D.; Sun, H.; Zhang, J.; Mo, R. In-process tool condition monitoring based on convolution neural network. Comput. Integr. Manuf. Syst. 2020, 26, 74–80. [Google Scholar]
- Nguyen, V.; Nguyen, V.; Pham, V. Deep Stacked Auto-Encoder Network Based Tool Wear Monitoring in the Face Milling Process. J. Mech. Eng./Stroj. Vestn. 2020, 66. [Google Scholar] [CrossRef]
- Ma, J.; Luo, D.; Liao, X.; Zhang, Z.; Huang, Y.; Lu, J. Tool wear mechanism and prediction in milling TC18 titanium alloy using deep learning. Measurement 2021, 173, 108554. [Google Scholar] [CrossRef]
- Khandey, U.; Arya, V. Optimization of Multiple Surface Roughness Characteristics of Mild Steel Turned Product Using Weighted Principal Component and Taguchi Method. In Materials Today: Proceedings; Elsevier: Amsterdam, The Netherlands, 2023. [Google Scholar]
- Tran, Q.K.; Huynh, K.T.; Grall, A.; Langeron, Y.; Mosayebi Omshi, E. A Review on Reinforcement Learning in Condition-Based Maintenance; IDEALS: Champaign, IL, USA, 2023. [Google Scholar]
- Serin, G.; Sener, B.; Ozbayoglu, A.M.; Unver, H.O. Review of tool condition monitoring in machining and opportunities for deep learning. Int. J. Adv. Manuf. Technol. 2020, 109, 953–974. [Google Scholar] [CrossRef]
- Kaelbling, L.P.; Littman, M.L.; Moore, A.W. Reinforcement learning: A survey. J. Artif. Intell. Res. 1996, 4, 237–285. [Google Scholar] [CrossRef]
- Gnanasekaran, S.; Jakkamputi, L.P.; Rakkiyannan, J.; Thangamuthu, M.; Bhalerao, Y. A comprehensive approach for detecting brake pad defects using histogram and wavelet features with nested dichotomy family classifiers. Sensors 2023, 23, 9093. [Google Scholar] [CrossRef] [PubMed]
- Dimla, D.E. Sensor signals for tool-wear monitoring in metal cutting operations—A review of methods. Int. J. Mach. Tools Manuf. 2000, 40, 1073–1098. [Google Scholar] [CrossRef]
- Mehta, N.K.; Pandey, P.C.; Chakravarti, G. An investigation of tool wear and the vibration spectrum in milling. Wear 1983, 91, 219–234. [Google Scholar] [CrossRef]
- Chelladurai, H.; Jain, V.; Vyas, N. Development of a cutting tool condition monitoring system for high speed turning operation by vibration and strain analysis. Int. J. Adv. Manuf. Technol. 2008, 37, 471–485. [Google Scholar] [CrossRef]
- Dimla, D.E. The correlation of vibration signal features to cutting tool wear in a metal turning operation. Int. J. Adv. Manuf. Technol. 2002, 19, 705–713. [Google Scholar] [CrossRef]
- El-Wardany, T.; Gao, D.; Elbestawi, M. Tool condition monitoring in drilling using vibration signature analysis. Int. J. Mach. Tools Manuf. 1996, 36, 687–711. [Google Scholar] [CrossRef]
- Orhan, S.; Er, A.O.; Camuşcu, N.; Aslan, E. Tool wear evaluation by vibration analysis during end milling of AISI D3 cold work tool steel with 35 HRC hardness. NDT E Int. 2007, 40, 121–126. [Google Scholar] [CrossRef]
- Dimla, D.; Lister, P. On-line metal cutting tool condition monitoring.: I: Force and vibration analyses. Int. J. Mach. Tools Manuf. 2000, 40, 739–768. [Google Scholar] [CrossRef]
- Ma, K.; Wang, G.; Yang, K.; Hu, M.; Li, J. Tool wear monitoring for cavity milling based on vibration singularity analysis and stacked LSTM. Int. J. Adv. Manuf. Technol. 2022, 120, 4023–4039. [Google Scholar] [CrossRef]
- Zheng, G.; Sun, W.; Zhang, H.; Zhou, Y.; Gao, C. Tool wear condition monitoring in milling process based on data fusion enhanced long short-term memory network under different cutting conditions. Eksploat. I Niezawodn. 2021, 23, 612–618. [Google Scholar] [CrossRef]
- Chan, Y.-W.; Kang, T.-C.; Yang, C.-T.; Chang, C.-H.; Huang, S.-M.; Tsai, Y.-T. Tool wear prediction using convolutional bidirectional LSTM networks. J. Supercomput. 2022, 78, 810–832. [Google Scholar] [CrossRef]
- Chen, Q.; Xie, Q.; Yuan, Q.; Huang, H.; Li, Y. Research on a real-time monitoring method for the wear state of a tool based on a convolutional bidirectional LSTM model. Symmetry 2019, 11, 1233. [Google Scholar] [CrossRef]
- Chen, Y.; Jin, Y.; Jiri, G. Predicting tool wear with multi-sensor data using deep belief networks. Int. J. Adv. Manuf. Technol. 2018, 99, 1917–1926. [Google Scholar] [CrossRef]
- Patil, S.S.; Pardeshi, S.S.; Pradhan, N.; Patange, A.D. Cutting tool condition monitoring using a deep learning-based artificial neural network. Int. J. Perform. Eng. 2022, 18, 37. [Google Scholar]
- Ou, J.; Li, H.; Huang, G.; Zhou, Q. A Novel Order Analysis and Stacked Sparse Auto-Encoder Feature Learning Method for Milling Tool Wear Condition Monitoring. Sensors 2020, 20, 2878. [Google Scholar] [CrossRef] [PubMed]
- Siraskar, R.; Kumar, S.; Patil, S.; Bongale, A.; Kotecha, K. Reinforcement learning for predictive maintenance: A systematic technical review. Artif. Intell. Rev. 2023, 56, 12885–12947. [Google Scholar] [CrossRef]
- Ding, Y.; Ma, L.; Ma, J.; Suo, M.; Tao, L.; Cheng, Y.; Lu, C. Intelligent fault diagnosis for rotating machinery using deep Q-network based health state classification: A deep reinforcement learning approach. Adv. Eng. Inform. 2019, 42, 100977. [Google Scholar] [CrossRef]
- Marugán, A.P. Applications of Reinforcement Learning for maintenance of engineering systems: A review. Adv. Eng. Softw. 2023, 183, 103487. [Google Scholar] [CrossRef]
- Zhou, C.A.; Yang, B.; Guo, K.; Liu, J.; Sun, J.; Song, G.; Zhu, S.; Sun, C.; Jiang, Z. Vibration singularity analysis for milling tool condition monitoring. Int. J. Mech. Sci. 2020, 166, 105254. [Google Scholar] [CrossRef]
- Zhou, C.; Jiang, X.; Sun, C.; Zhu, Z. The Monitoring of Milling Tool Tipping by Estimating Holder Exponents of Vibration. IEEE Access 2020, 8, 96661–96668. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classes/Metrics | Precision | Recall | FPR | F1 Score | Support |
|---|---|---|---|---|---|
| New | 0.9378 | 1.0000 | 0.0300 | 1.0000 | 200 |
| Working | 0.9082 | 0.9050 | 0.0475 | 0.9211 | 200 |
| Dull | 1.0000 | 0.9400 | 0.0000 | 0.9238 | 200 |
| Overall accuracy: 0.9485; Kappa statistics: 0.9225 | |||||
| Classes/Metrics | Precision | Recall | FPR | F1 Score | Support |
|---|---|---|---|---|---|
| New | 0.9596 | 0.9550 | 0.0050 | 0.9720 | 200 |
| Working | 0.9865 | 0.9900 | 0.0225 | 0.9729 | 200 |
| Dull | 1.0000 | 1.0000 | 0.0000 | 1.0000 | 200 |
| Overall accuracy: 0.9816; Kappa statistics: 0.9725 | |||||
| Classes/Metrics | Precision | Recall | FPR | F1 Score | Support |
|---|---|---|---|---|---|
| New | 0.9851 | 0.9950 | 0.0050 | 0.9900 | 200 |
| Working | 0.9897 | 0.9700 | 0.0125 | 0.9797 | 200 |
| Dull | 0.9801 | 0.9900 | 0.0075 | 0.9850 | 200 |
| Overall accuracy: 0.9850; Kappa statistics: 0.9775 | |||||
| Classes/Metrics | Precision | Recall | FPR | F1 Score | Support |
|---|---|---|---|---|---|
| New | 0.9705 | 0.9950 | 0.0025 | 0.9875 | 200 |
| Working | 0.9850 | 0.9750 | 0.0075 | 0.9848 | 200 |
| Dull | 0.9801 | 0.9900 | 0.0100 | 0.9875 | 200 |
| Overall accuracy: 0.9866; Kappa statistics: 0.9800 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaliyannan, D.; Thangamuthu, M.; Pradeep, P.; Gnansekaran, S.; Rakkiyannan, J.; Pramanik, A. Tool Condition Monitoring in the Milling Process Using Deep Learning and Reinforcement Learning. J. Sens. Actuator Netw. 2024, 13, 42. https://doi.org/10.3390/jsan13040042
Kaliyannan D, Thangamuthu M, Pradeep P, Gnansekaran S, Rakkiyannan J, Pramanik A. Tool Condition Monitoring in the Milling Process Using Deep Learning and Reinforcement Learning. Journal of Sensor and Actuator Networks. 2024; 13(4):42. https://doi.org/10.3390/jsan13040042
Chicago/Turabian StyleKaliyannan, Devarajan, Mohanraj Thangamuthu, Pavan Pradeep, Sakthivel Gnansekaran, Jegadeeshwaran Rakkiyannan, and Alokesh Pramanik. 2024. "Tool Condition Monitoring in the Milling Process Using Deep Learning and Reinforcement Learning" Journal of Sensor and Actuator Networks 13, no. 4: 42. https://doi.org/10.3390/jsan13040042
APA StyleKaliyannan, D., Thangamuthu, M., Pradeep, P., Gnansekaran, S., Rakkiyannan, J., & Pramanik, A. (2024). Tool Condition Monitoring in the Milling Process Using Deep Learning and Reinforcement Learning. Journal of Sensor and Actuator Networks, 13(4), 42. https://doi.org/10.3390/jsan13040042