

Electric Vehicles Energy Management for Vehicle-to-Grid 6G-Based Smart Grid Networks


Abstract
:1. Introduction
- Load shifting consists of shifting the demand for an electrical device, i.e., postponing or advancing a demand from one time slot of the day to another.
- The reduction in the peak of electricity demand, or peak clipping, can be performed by reducing or very occasionally cutting off electricity use. This solution reduces the electrical power during peak periods and induces a consumption drop.
- Valley filling makes it possible to increase the load during periods when it is less important.
2. Related Work
- –
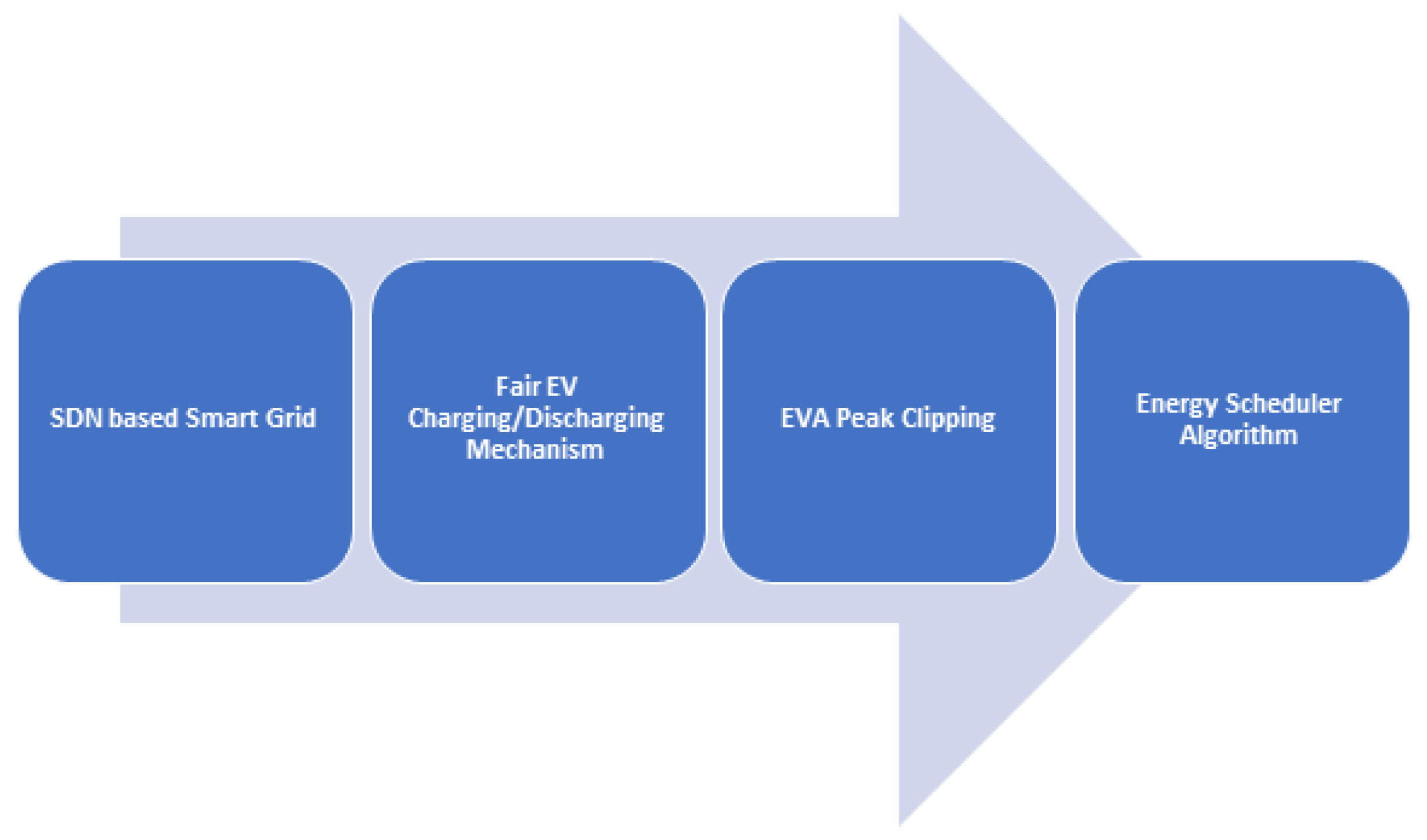
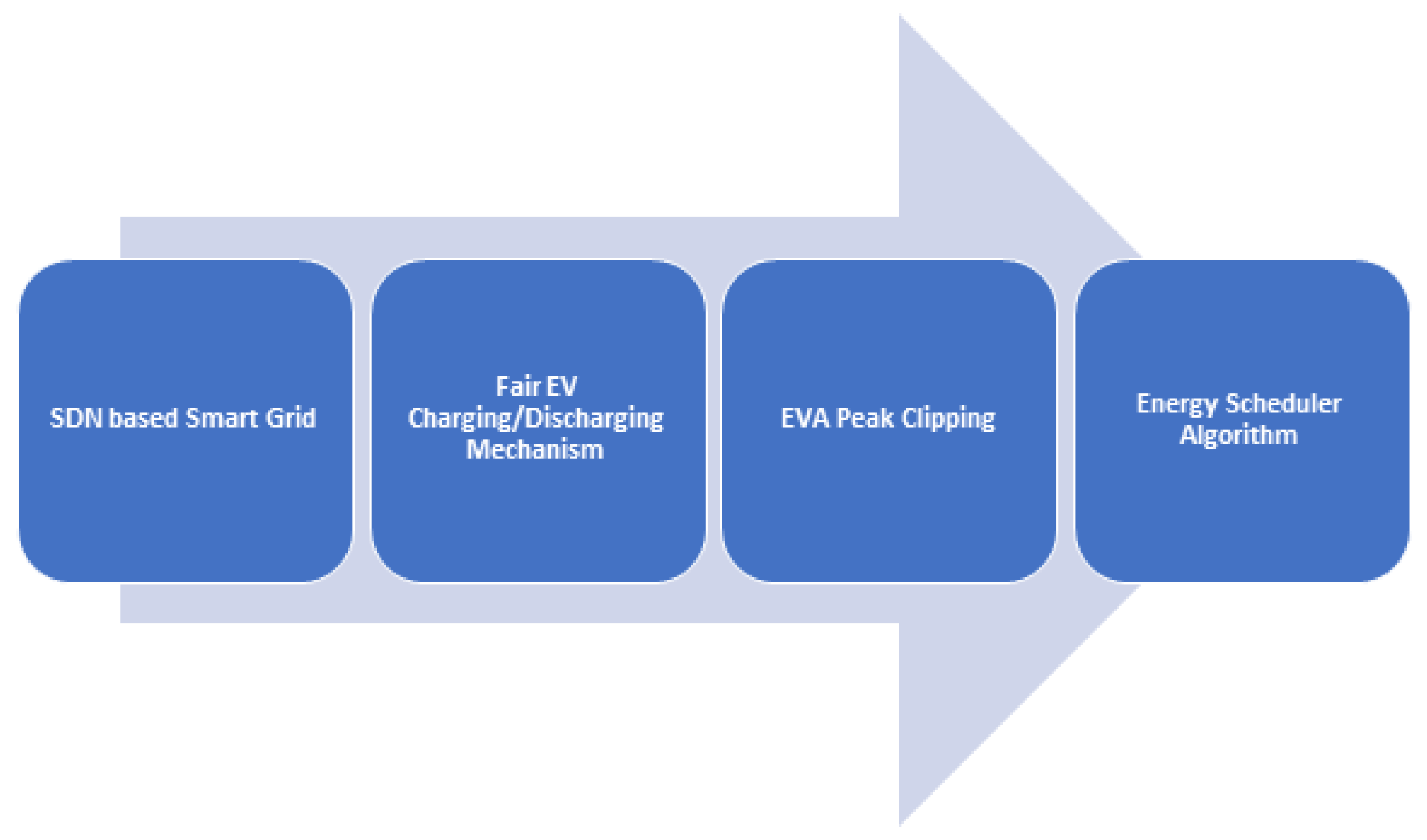
- Energy optimization process is critical and should be controlled efficiently. Therefore, we integrate the software defined network technology that controls timely loads, network slices, the Virtual Power Plant (VPP), and the electric vehicles aggregator. On the other hand, the EVA is responsible for orchestrating the charging or discharging of vehicles connected to the system, taking into account the energy supplied or required by the VPP.
- –
- Research projects dealing with V2G consider one class of vehicles; while these models may function well under typical common circumstances, they may be inefficient in the event of urgent vehicles that pose time constraints. Based on this knowledge, we develop a fair charging mechanism that considers two classes of vehicles and demonstrate how our system fulfills vehicles’ requirements. The charging mechanism relies on the driver satisfaction computed according to the percentage of battery charged during the last charging session and the last time the vehicle needed energy from the grid.
- –
- Vehicle discharging is of paramount importance for the V2G process. Nevertheless, an inefficient unfair discharging mechanism may lead to frustrating drivers. Therefore in light of this understanding, we devised a mechanism based on degradation degree and degradation ratio that protects the vehicles batteries that have been frequently discharged in the past. The suggested module’s performance results demonstrate its advantages and demonstrate that it enhances vehicles fairness and satisfaction.
- –
- We implemented an energy optimization algorithm that dispatches energy between two types of loads: non-flexible loads (medical clinic) and flexible loads (electrical vehicles).The main objective of the proposed energy management model is to establish balancing between power consumption and production, while performing peak clipping and valley filling.
3. The 6G-Based Energy Management Architecture
3.1. Architecture Actors
- –
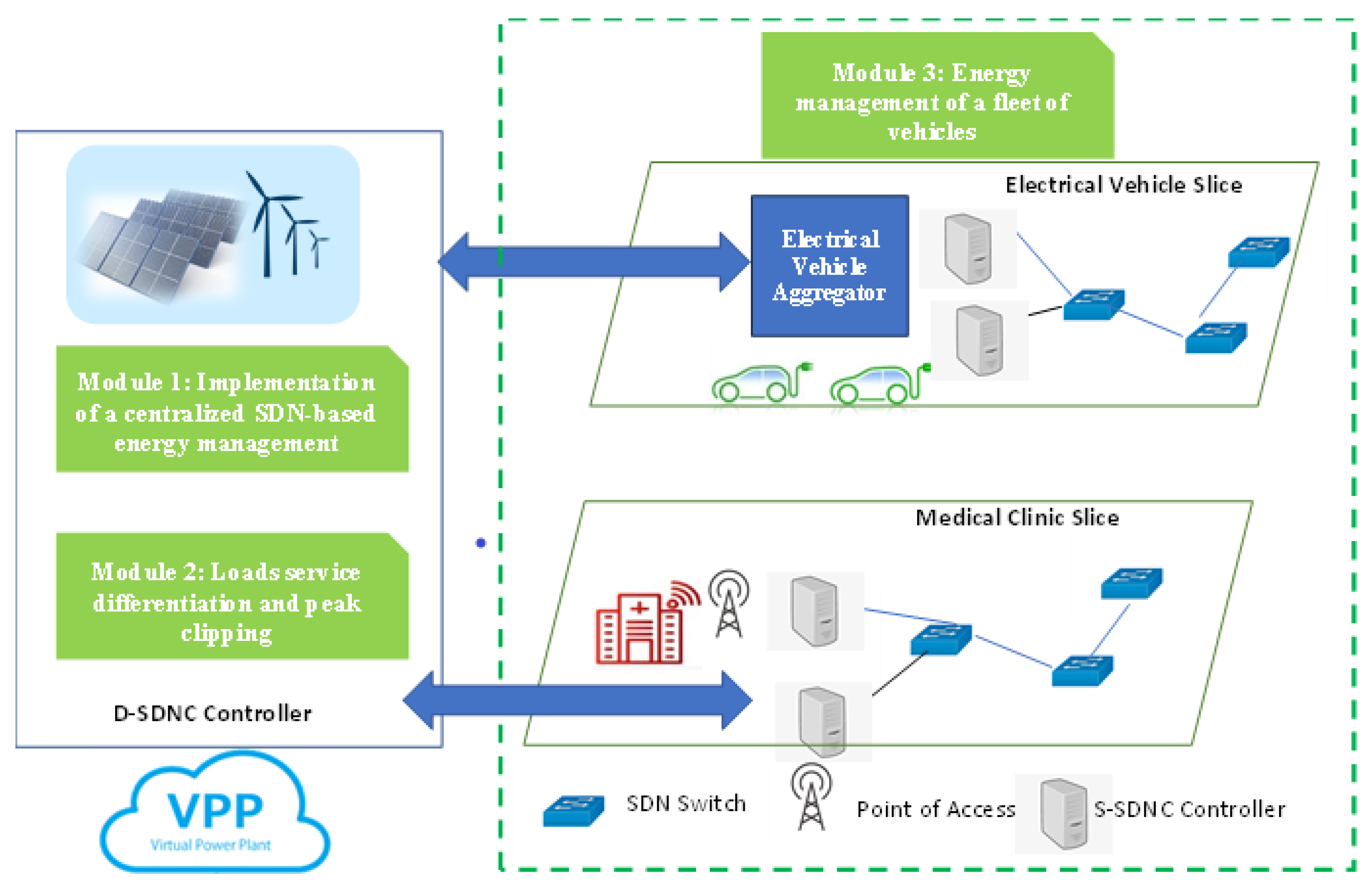
- Renewable energy sources:The power supply to the smart grid is provided by a set of wind turbines and photovoltaic panels.
- –
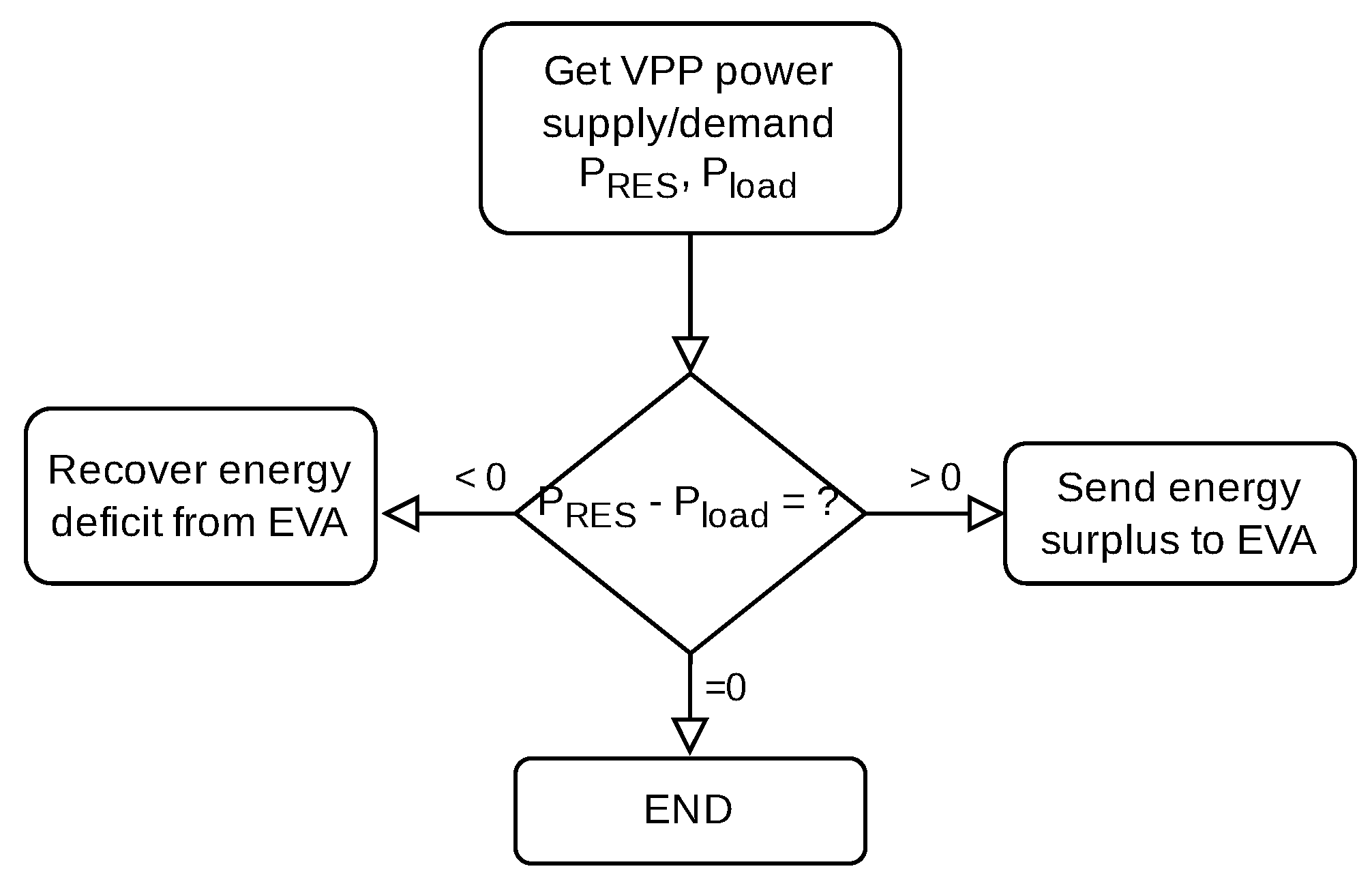
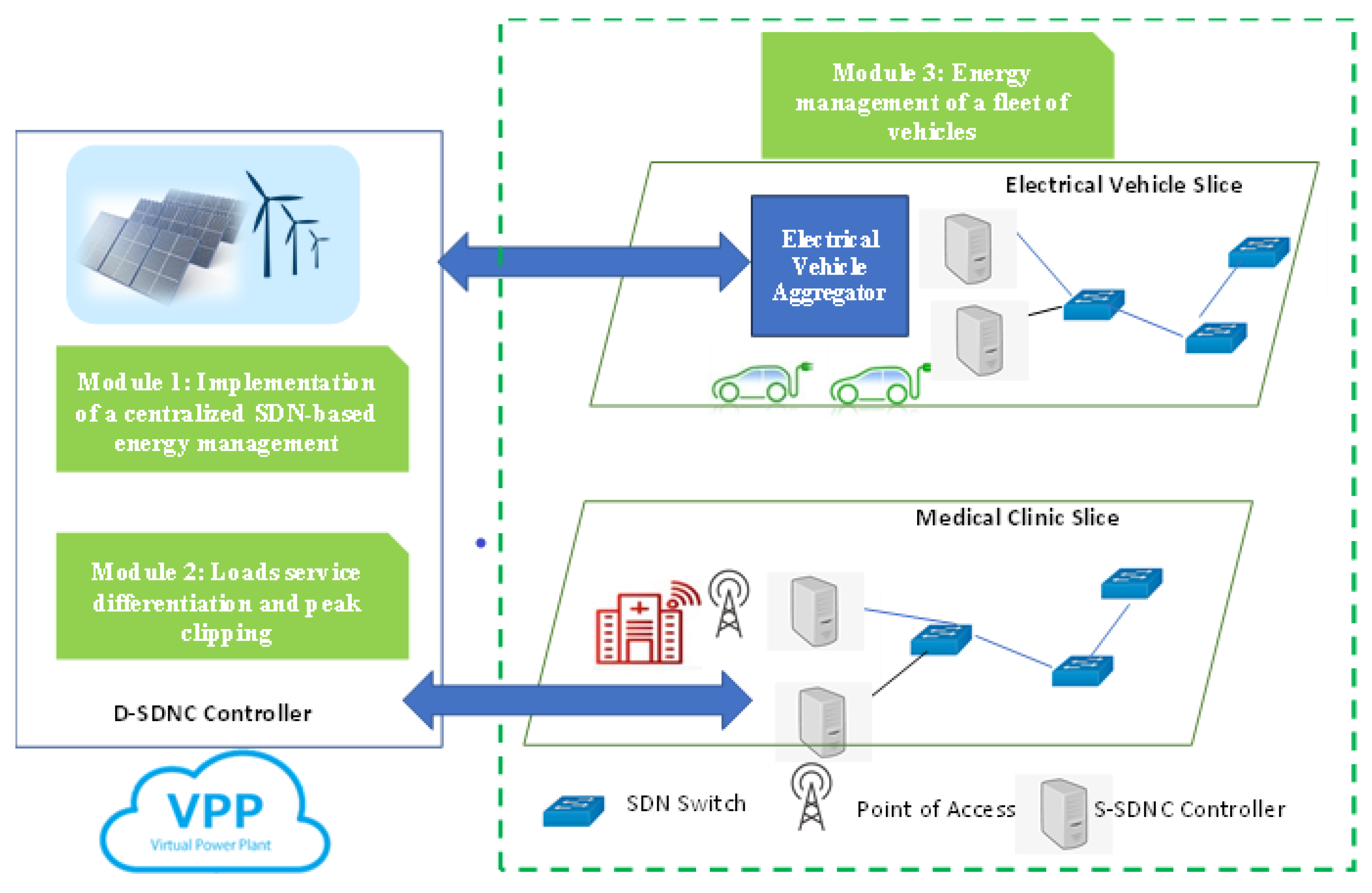
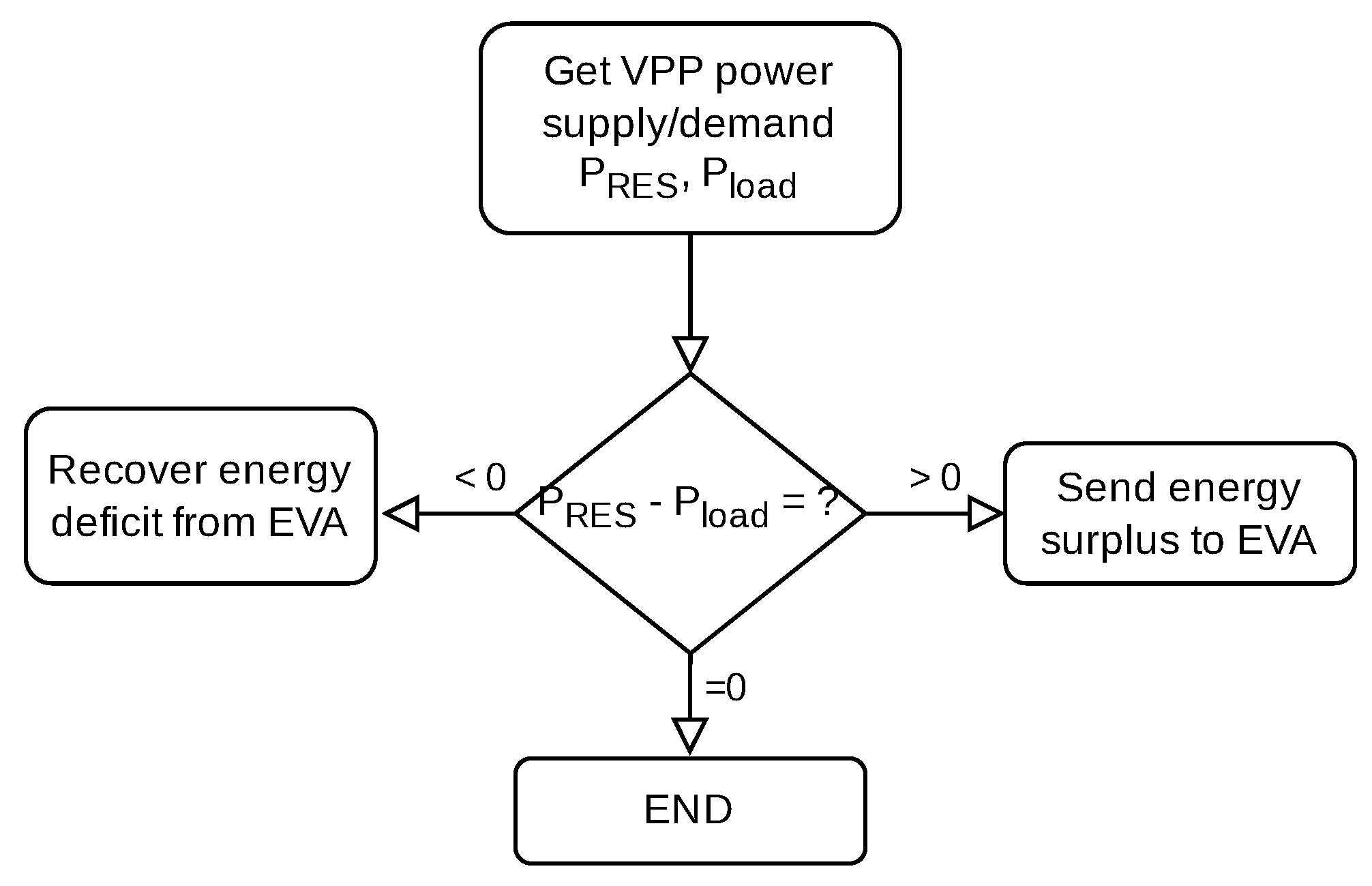
- Virtual power plant:The VPP is a cloud-based data control center that aggregates production data from various distributed energy resources. This data center uses various communication technologies and internet of things sensors to gather data, which enables it to monitor and control the production of each plant. Thus, VPP computes regularly the residual energy demand or the surplus energy remaining.
- –
- Electric vehicle aggregator:The EVA aggregates battery vehicles and interacts with the VPP for the provision of energy and capacity services.
- –
- Flexible loads: The considered flexible loads are battery electric vehicles that adhere to specific demand response programs, e.g., peak clipping and valley filling.
- –
- Non-flexible load:The considered non-flexible load is a medical clinic that does not adapt to the smart grids energy. Therefore, they do not apply any demand response program.
- –
- SDN controllers:SDN controllers are either Dedicated SDN Controller (D-SDNC) or Shared SDN Controller (S-SDNC). The D-SDNC is a SDN controller that plays a crucial role in the energy management function, in our architecture. It hosts the virtual power plant and interacts with the shared SDN controller. The S-SDNC applies the control rules disseminated by the D-SDNC.
3.2. Architecture Modules
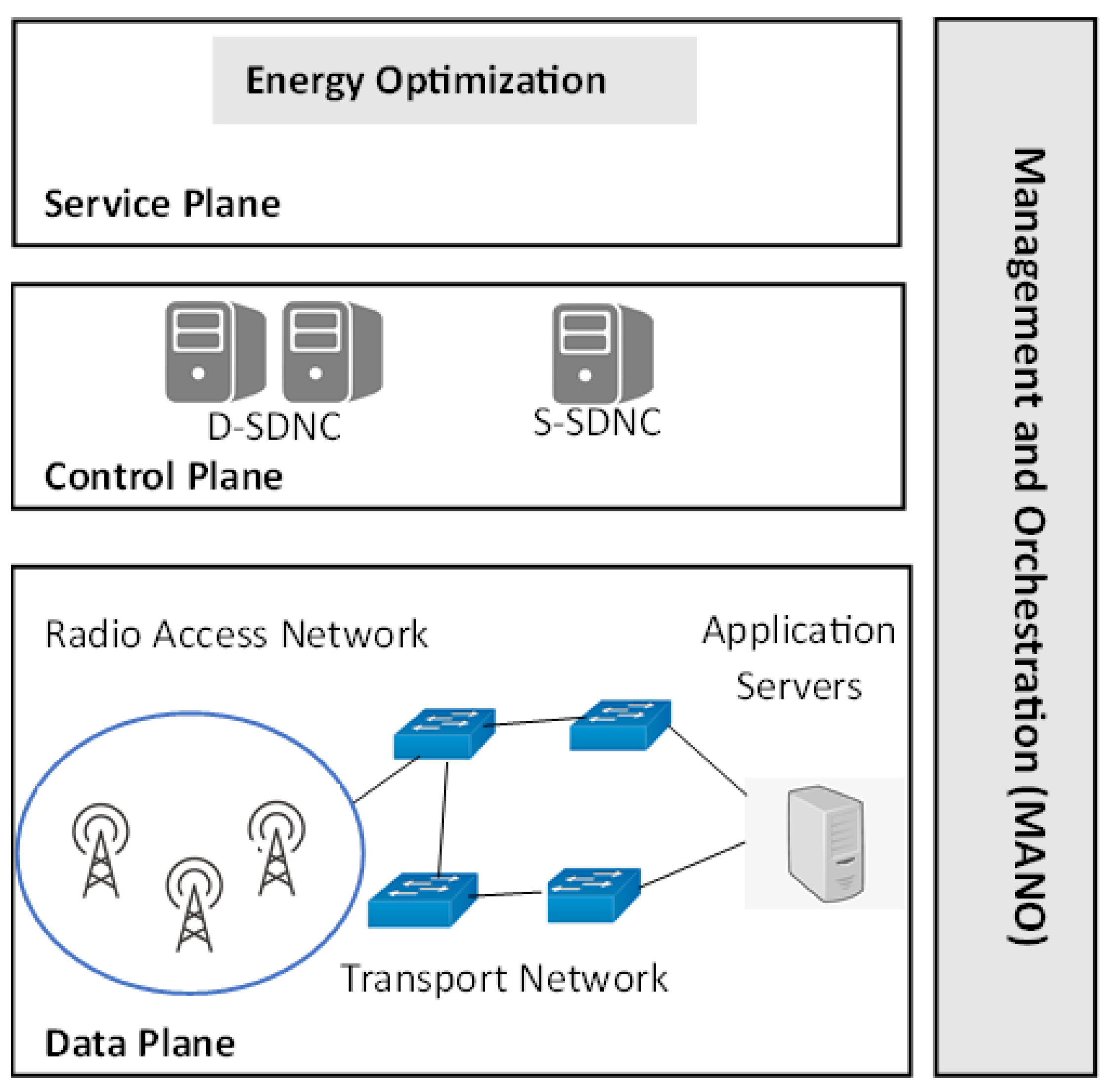
3.3. Network Slicing
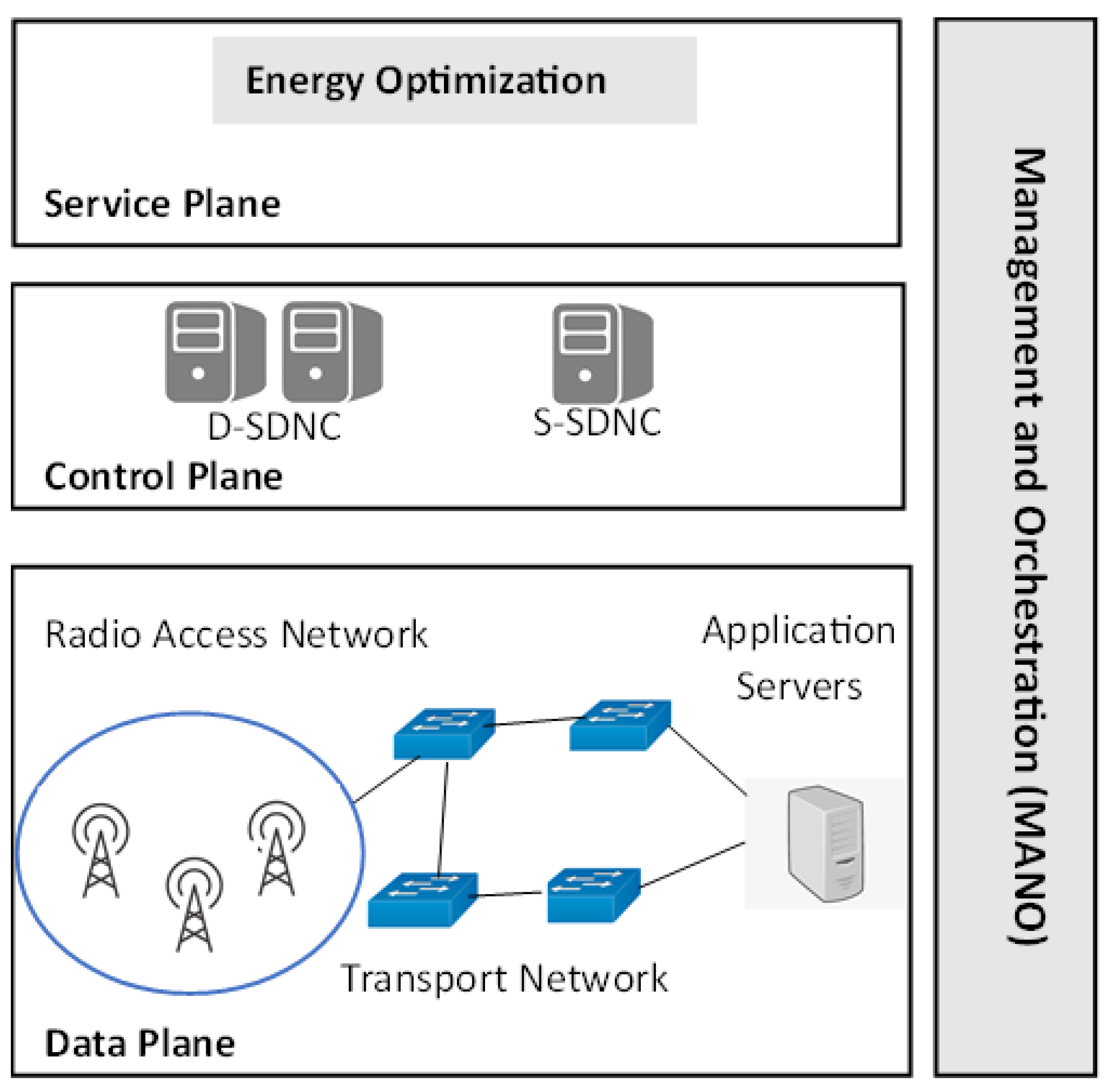
- Data plane: The infrastructure plane also contains all other physical network infrastructure, including the radio access network and core network. The transport network, storage nodes, computing nodes, and radio access network nodes and devices are all included.
- Control plane: The control plane holds the logical network behaviors that manage a slice. The two main SDN-based control entities that constitute the control plane are D-SDNC and S-SDNC. On top of the S-SDNC, some network functionalities, shared by all accessible slices, are present. Energy management, slice selection, inter-slice mobility management, and load balancing between slices are all considered to be SDN applications. Each slice also has a few unique features that are implemented as D-SDNC programs.The Fifth Generation Public Private Partnership (5G-PPP) [34] identifies three reference slices: enhanced mobile broadband, massive machine type communications, and ultra-reliable low latency communications. Because there are many V2X services, there is no straightforward mapping into the aforementioned reference slices. As a result, new V2X use cases require the creation of dedicated network slices. Slices of the V2X network are shown and developed in articles [35,36]. According to the authors of [37], the adoption of network slicing in V2X can increase the likelihood of producing intelligent and secure traffic. This paper will discuss two use cases: medical care and electrical transportation. It is noteworthy that each slice has particular requirements and quality of service needs.
- Service plane: The services and use cases for each vertical market are represented in the service plane.
- Management and orchestration (MANO) plane: The MANO plane is in charge of slice description, instantiation, and life-cycle management. The MANO plane’s core is an SDN controller called software defined orchestrator. The latter enables resource distribution across the slices of numerous operators.
4. Smart Grid Optimization Energy Scheduling Algorithms
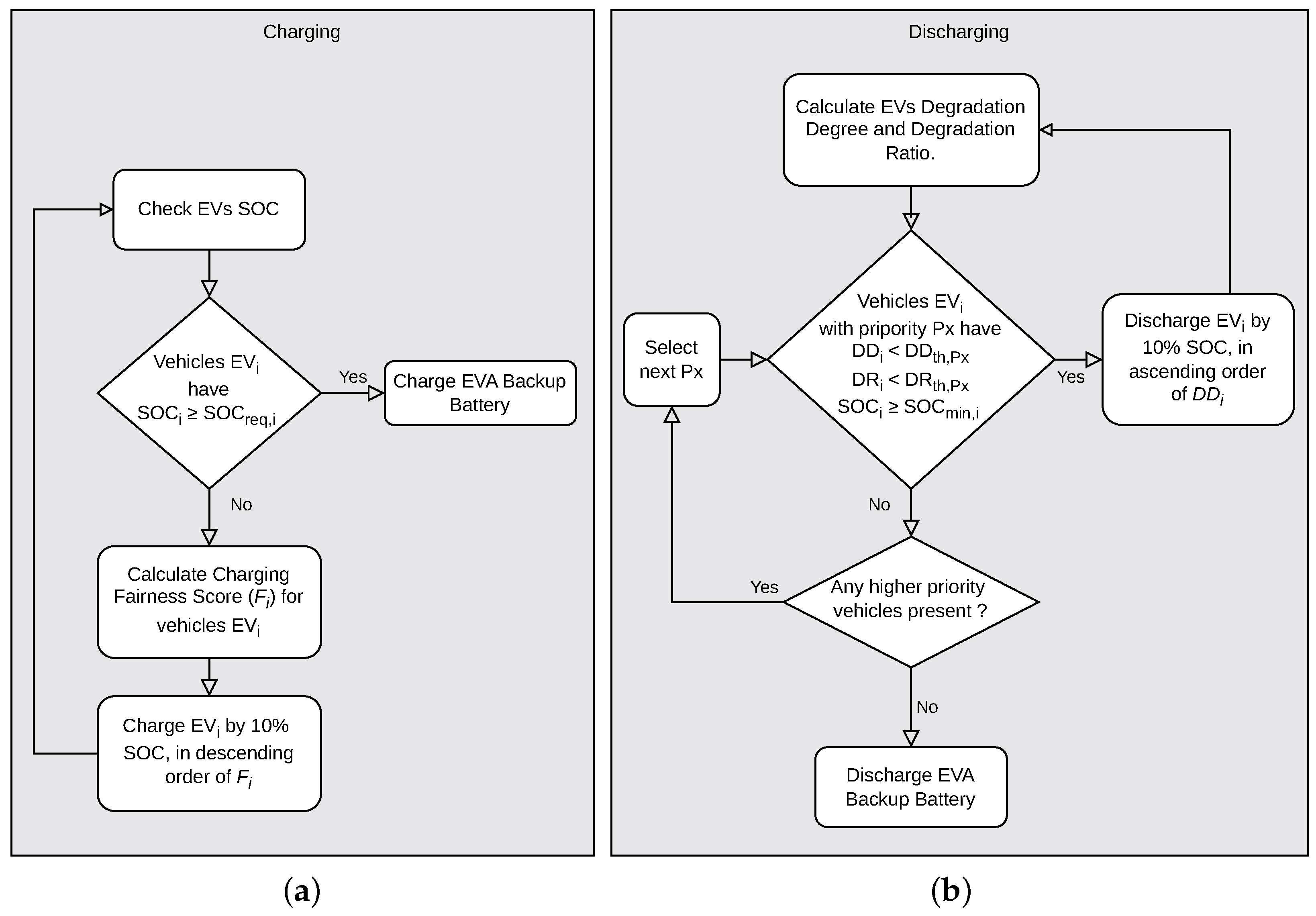
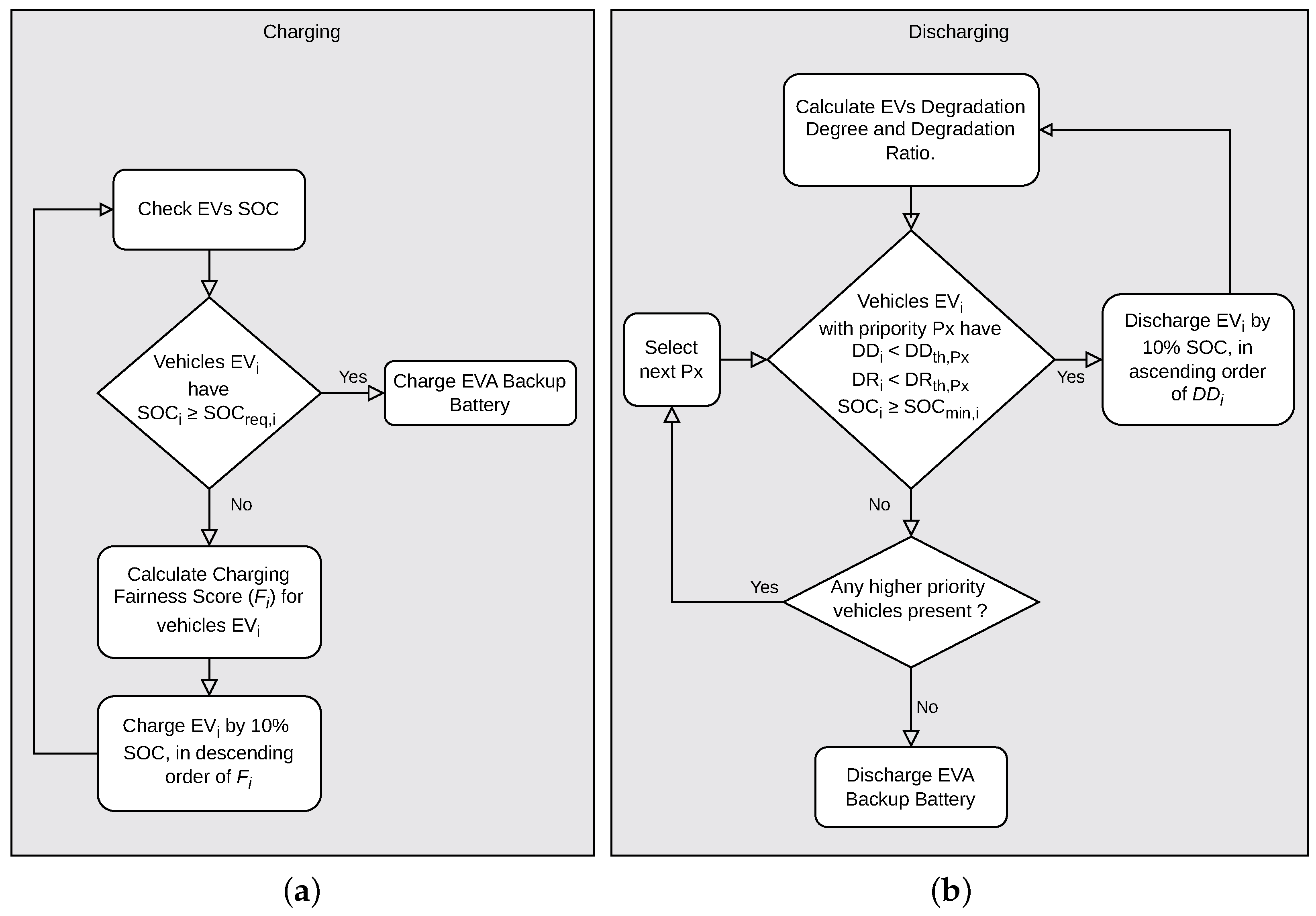
4.1. Electrical Vehicle Charging Algorithm at EVA
- denotes the average time, measured in timeslots, required to charge 1% of SOC during the previous visit of at the charging station.
- is the duration (in sec) of one timeslot.
- indicates the number of timeslots that remained plugged-in during the previous visit.
- is the effective charge of during the previous visit, calculated as the difference between at plug-out time and at plug-in time. When , an arbitrary constant is introduced.
- is the time elapsed (in days) since the previous visit of at the charging station.
- and are coefficients used to prioritize the different factors. These coefficients can be adjusted based on the importance assigned to each factor. In the simulations (see Section 5), we set and , prioritizing the quantity of charge from the previous session over the time elapsed.
4.2. Electrical Vehicle Discharging Algorithm at EVA
4.3. Centralized Management Algorithm at the VPP
5. Energy Optimization Platform Validation
5.1. Simulation Scenario
- Constraints related to power supplied by RES:
- Constraints related to charging and discharging power of EV battery:where = 0 when x is false and forbids the charging and discharging at the same time.
- Constraints related to acceptable SOC levels in order to preserve battery life and permit anytime usage of EVs:
- Constraints related to fairness in discharging:
- Smart grid load balance condition:where and are, respectively, the sum of discharging powers and charging powers of eligible EVs. When no EV is eligible for charging/discharging, power is provided/used by EVA storage batteries.
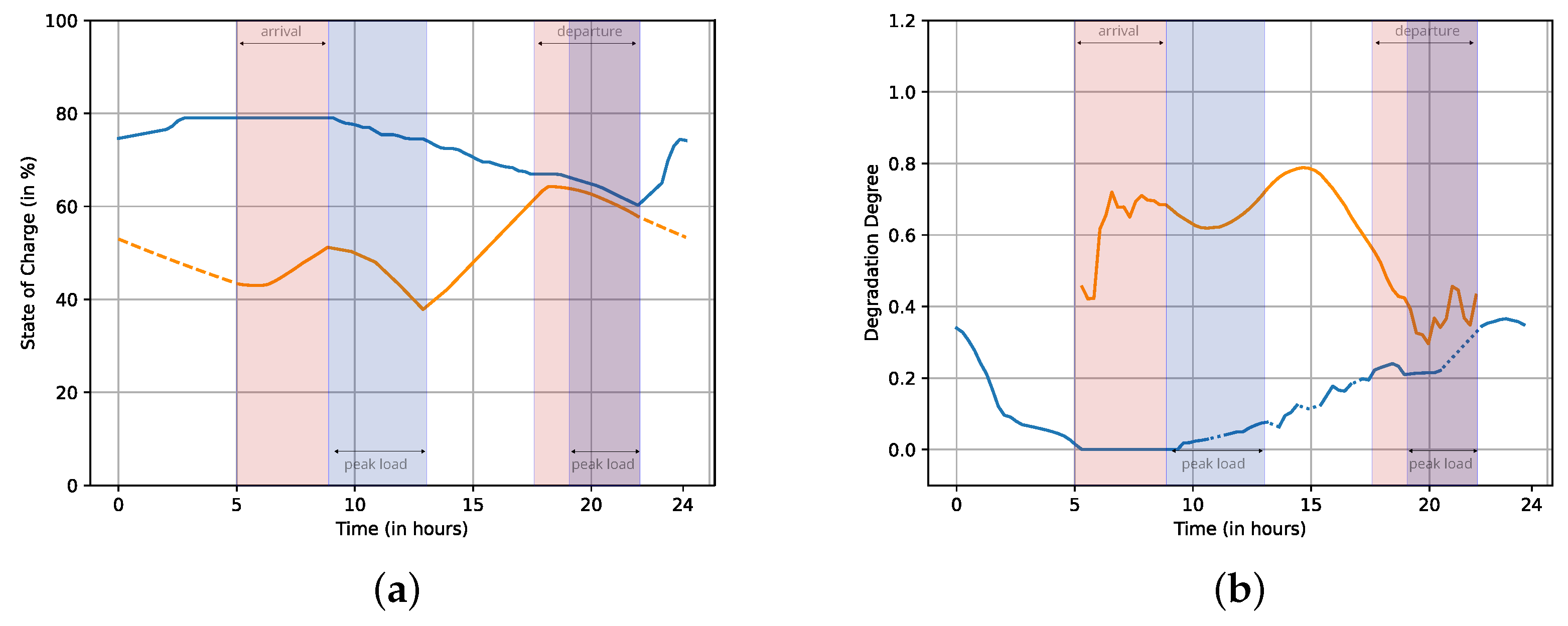
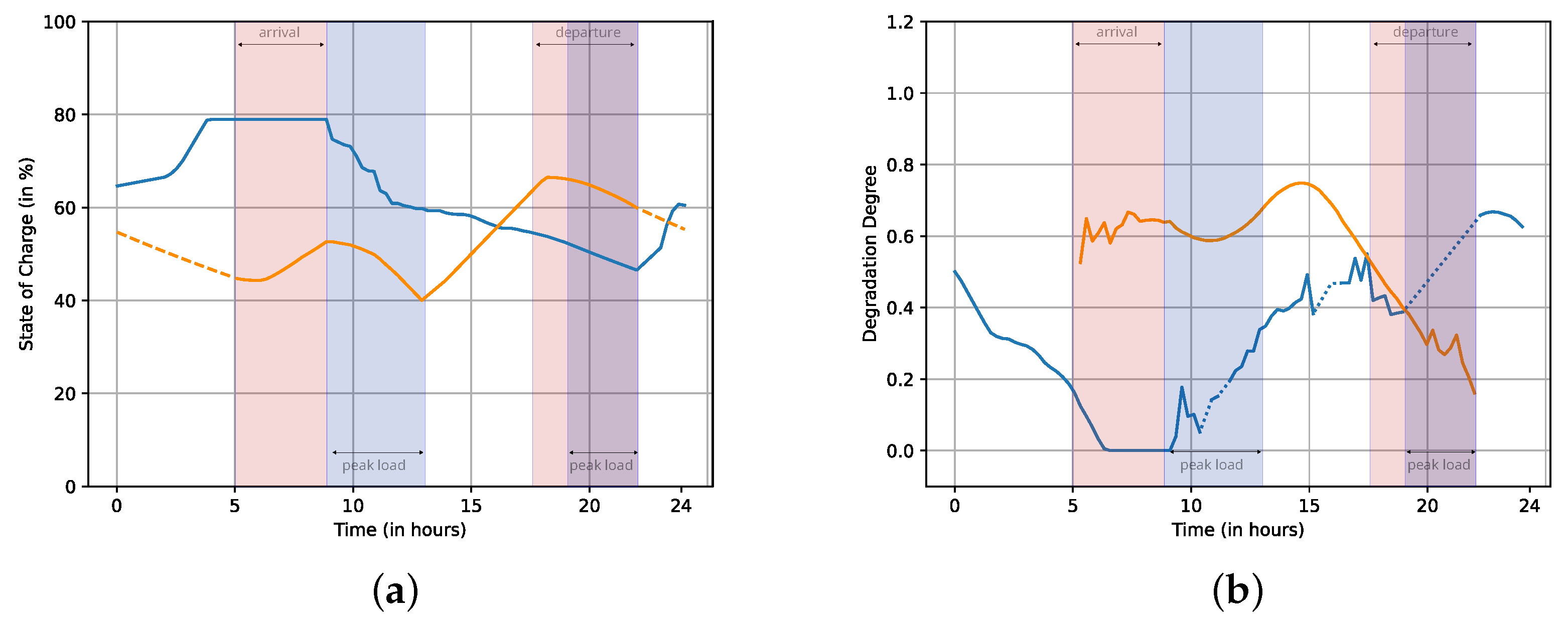
5.2. Performance Analysis
5.3. Scenarios
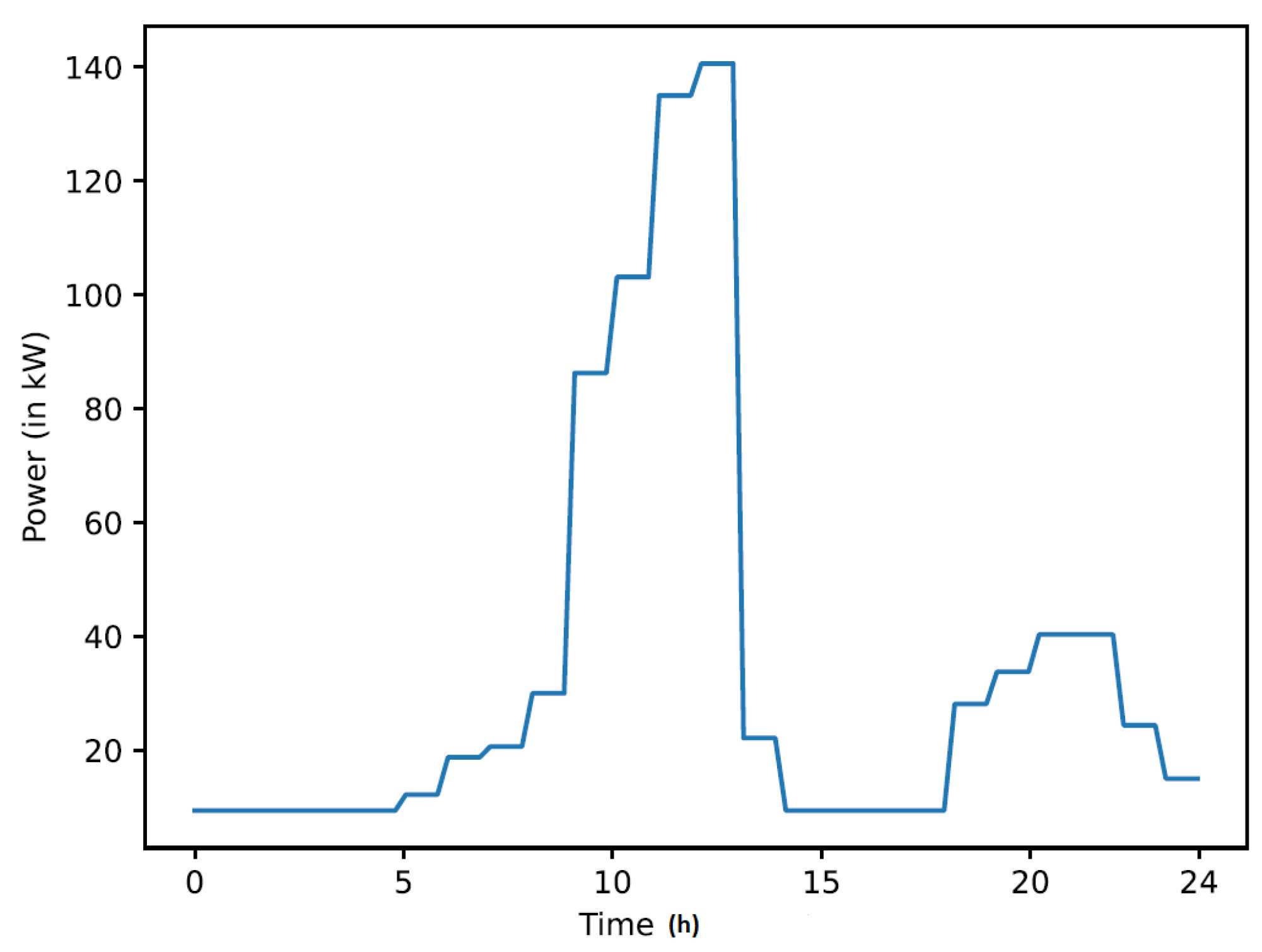
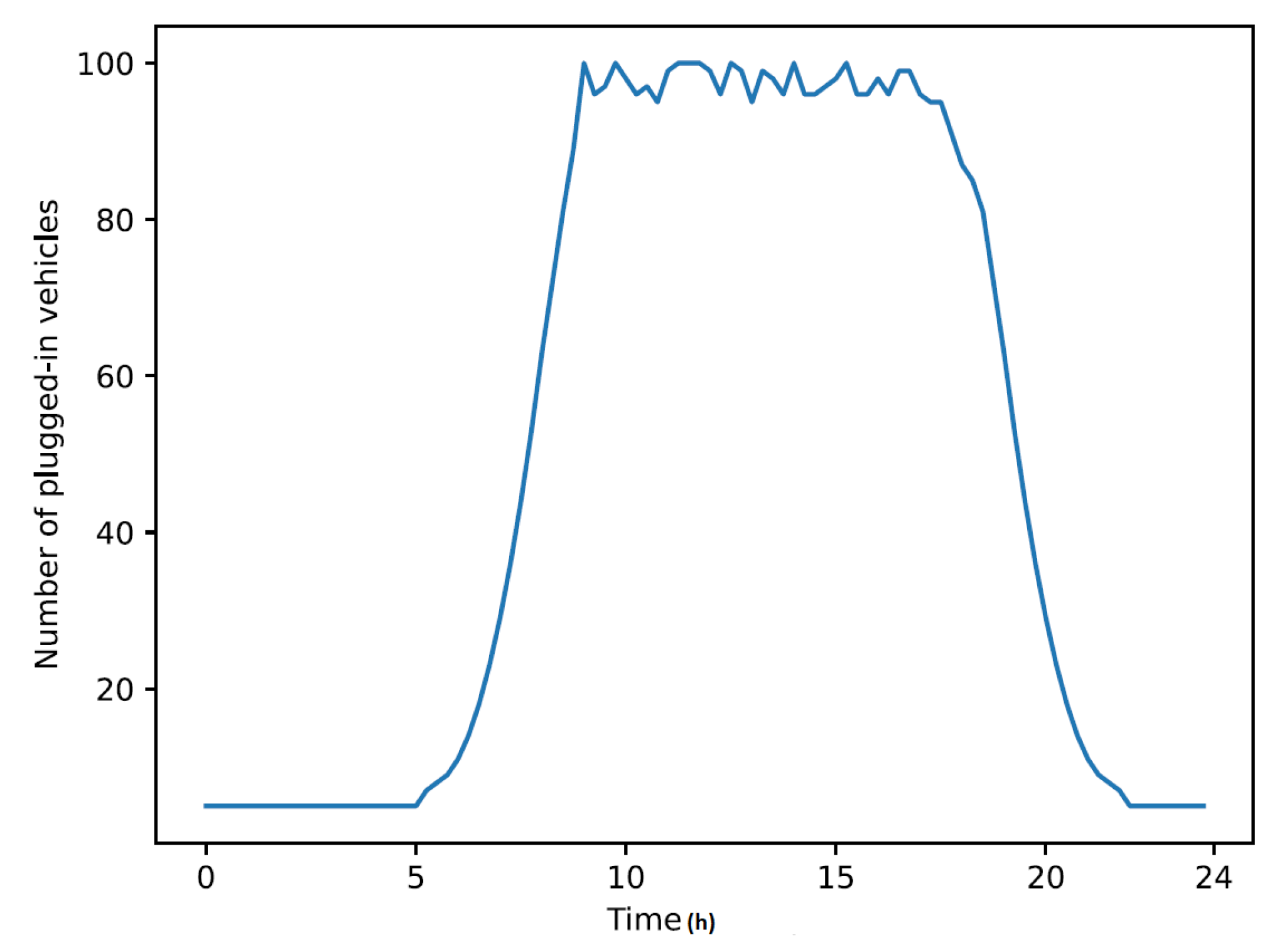
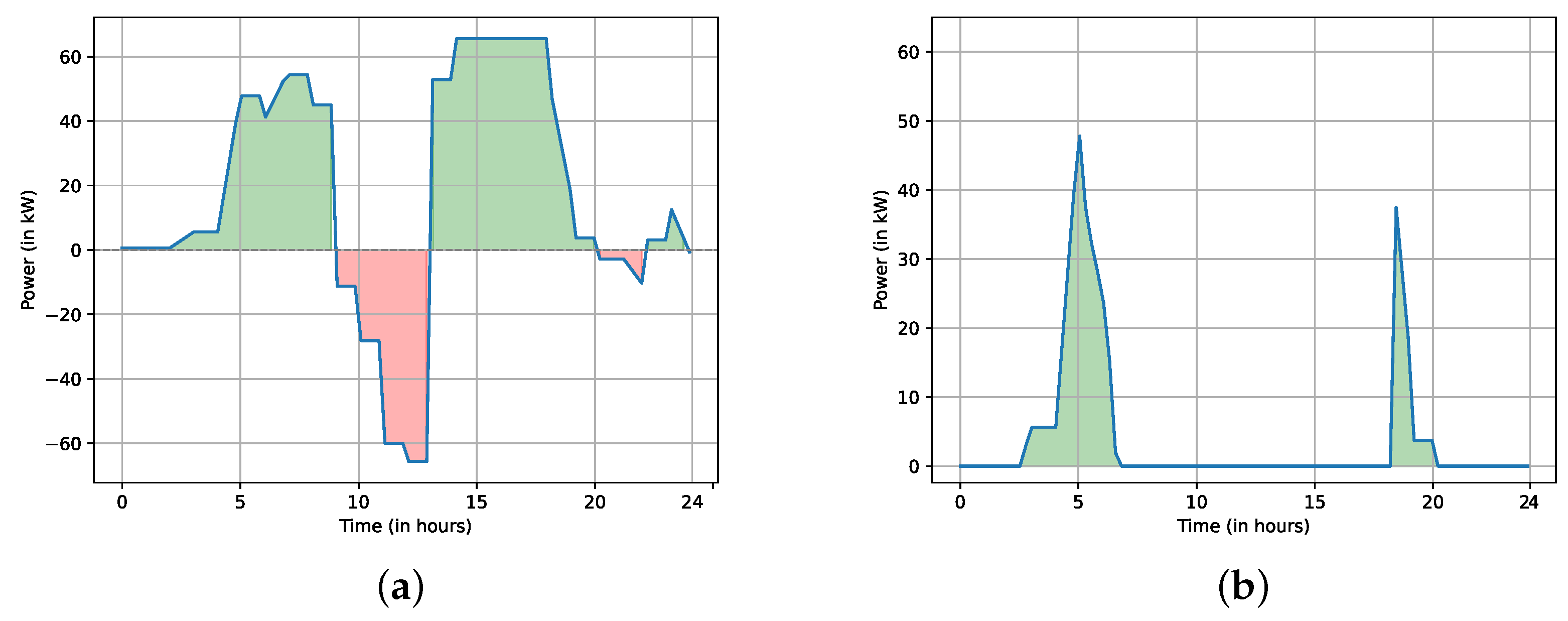
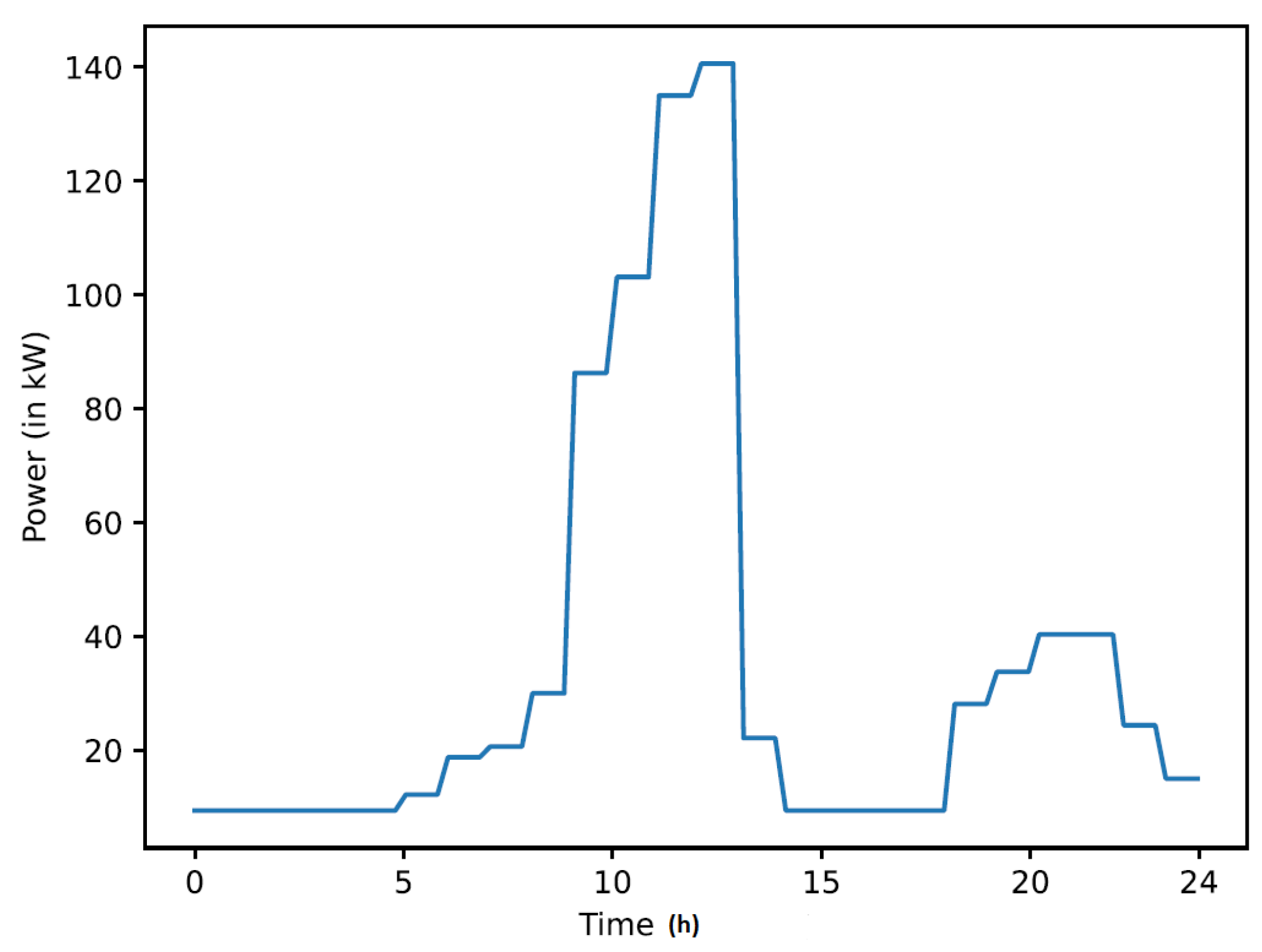
5.4. Smart-Grid Available Power
5.5. EV User Satisfaction
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- International Energy Agency IEA. World Energy Outlook. 2023. Available online: www.iea.org/weo (accessed on 1 October 2023).
- Patil, S.; Deshmukh, S.R. Development of Control Strategy to Demonstrate Load Priority System for Demand Response Program. In Proceedings of the IEEE International WIE Conference on Electrical and Computer Engineering (WIECON-ECE), Bangalore, India, 15–16 November 2019; pp. 1–6. [Google Scholar]
- Chekired, D.A.; Khoukhi, L.; Mouftah, H.T. Decentralized cloud-SDN architecture in smart grid: A dynamic pricing model. IEEE Trans. Ind. Inform. 2018, 14, 1220–1231. [Google Scholar] [CrossRef]
- Nafi, N.S.; Ahmed, K.; Datta, M.; Gregory, M.A. A novel software defined wireless sensor network based grid to vehicle load management system. In Proceedings of the 10th International Conference on Signal Processing and Communication Systems (ICSPCS), Surfers Paradise, QLD, Australia, 19–21 December 2016; pp. 1–6. [Google Scholar]
- Zhao, J.; Hammad, E.; Farraj, A.; Kundur, K. Network-Aware QoS Routing for Smart Grids Using Software Defined Networks; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; pp. 384–394. [Google Scholar]
- Dorsch, N.; Kurtz, F.; Girke, F.; Wietfeld, C. Enhanced fast failover for software-defined smart grid communication networks. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Ghosh, U.; Chatterjee, P.; Shetty, S. A security framework for SDNE enabled smart power grids. In Proceedings of the IEEE 37th International Conference on Distributed Computing Systems Workshops (ICDCSW), Atlanta, GA, USA, 5–8 June 2017; pp. 113–118. [Google Scholar]
- Lin, H.; Chen, C.; Wang, J.; Qi, J.; Jin, D.; Kalbarczyk, Z.; Iyer, R.K. Self-healing attack-resilient PMU network for power system operation. IEEE Trans. Smart Grid 2018, 9, 1551–1565. [Google Scholar] [CrossRef]
- Mouawad, N.; Naja, R.; Tohme, S. Inter-slice handover management in a V2X slicing environment using bargaining games. Wirel. Netw. 2020, 26, 3883–3903. [Google Scholar] [CrossRef]
- Seyed Arash, A.; Ali Ahmadian, A.; Aliakbar-Golka, M. Optimal probabilistic energy management in a typical micro-grid based-on robust optimization and point estimate method. J. Energy Convers. Manag. 2015, 95, 314–325. [Google Scholar]
- Alireza, Z.; Jadid, S.; Siano, P. Stochastic multi-objective operational planning of smart distribution systems considering demand response programs. J. Electr. Power Syst. Res. 2014, 111, 156–168. [Google Scholar]
- Al-Sumaiti, A.; Saad, A.; Hassan Ahmed, M.; Rivera, S.; Shawky El Moursi, M.; Salama, M.M.A.; Alsumaiti, T. Stochastic PV model for power system planning applications. J. Iet Renew. Power Gener. 2019, 16, 3168–3179. [Google Scholar] [CrossRef]
- Mehran, M.; Abdollahi, A.; Rashidinejad, M. Possibilistic-probabilistic self-scheduling of PEVAggregator for participation in spinning reserve market considering uncertain DRPs. J. Energy 2020, 196, 108–117. [Google Scholar]
- Masood, P.; Fotuhi-Firuzabad, M. Integrating load reduction into wholesale energy market with application to wind power integration. IEEE Syst. J. 2011, 1, 35–45. [Google Scholar]
- Sheraz, A.; Khalid, A.; Javaid, N. Towards efficient energy management in smart grids considering microgrids with day- ahead energy forecasting. Electr. Power Syst. Res. 2020, 1, 106–232. [Google Scholar]
- Nihan, C.; Delic, H. Demand response management for smart grids with wind power. IEEE Trans. Sustain. Energy 2015, 2, 625–634. [Google Scholar]
- Aghajani, G.R.; Shayanfar, H.A.; Shayeghi, H. Demand side management in a smart micro-grid in the presence of renewable generation and demand response. IEEE Trans. Sustain. Energy 2017, 126, 622–637. [Google Scholar] [CrossRef]
- Aghajani, G.R.; Shayanfar, H.A.; Shayeghi, H. Presenting a multi- objective generation scheduling model for pricing demand response rate in micro-grid energy management. Energy Convers. Manag. 2015, 106, 308–321. [Google Scholar] [CrossRef]
- Gholamreza, A.; Ghadimi, N. Multi-objective energy management in a micro-grid. Energy Rep. 2018, 4, 218–225. [Google Scholar]
- Mohamed, F.A.; Heikki, N.K. System modelling and online optimal management of microgrid using mesh adaptive direct search. Int. Electr. Power Energy Syst. 2010, 5, 398–407. [Google Scholar] [CrossRef]
- Mohamed, F.A.; Heikki, N.K. Multiobjective optimization using Mesh Adaptive Direct Search for power dispatch problem of microgrid. Int. J. Electr. Power Energy Syst. 2012, 1, 728–735. [Google Scholar] [CrossRef]
- Afshar, K.; Shokri Gazafroudi, A. Application of Stochastic Programming to Determine Operating Reserves with Considering Wind and Load Uncertainties. J. Oper. Autom. Power Eng. 2013, 1, 23–30. [Google Scholar]
- Zhang, S.; Leung, K. A Smart Cross-System Framework for Joint Allocation and Scheduling with Vehicle-to-Grid Regulation Service. IEEE Trans. Veh. Technol. 2022, 71, 6019–6031. [Google Scholar] [CrossRef]
- Ahmed, I.; Rehan, M.; Basit, A.; Tufail, M.; Hong, K. A Dynamic Optimal Scheduling Strategy for Multi-Charging Scenarios of Plug-in-Electric Vehicles Over a Smart Grid. IEEE Access 2023, 11, 28992–29008. [Google Scholar] [CrossRef]
- Das, S.; Acharjee, P.; Bhattacharya, A. Charging Scheduling of Electric Vehicle Incorporating Grid-to-Vehicle and Vehicle-to-Grid Technology Considering in Smart Grid. IEEE Trans. Ind. Appl. 2021, 57, 1688–1702. [Google Scholar] [CrossRef]
- Khayyama, H.; Ranjbarzadeha, H.; Maranob, V. Intelligent control of vehicle-to-grid power. J. Power Sources 2011, 201, 1–9. [Google Scholar] [CrossRef]
- Mignoni, N.; Carli, R.; Dotoli, M. Distributed Noncooperative MPC for Energy Scheduling of Charging and Trading Electric Vehicles in Energy Communities. IEEE Trans. Control. Syst. Technol. 2023, 31, 2159–2172. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of vehicle-to-grid on the distribution grid. Electr. Power Syst. Res. 2011, 81, 185–192. [Google Scholar] [CrossRef]
- Guille, C.; Gross, G. A conceptual framework for the vehicle-to-grid (V2G) implementation. Energy Policy 2009, 37, 437–4390. [Google Scholar] [CrossRef]
- Saber, A.Y.; Venayagamoorthy, G.K. Intelligent unit commitment with vehicle-to-grid—A cost-emission optimization. J. Power Sources 2010, 195, 898–911. [Google Scholar] [CrossRef]
- Naja, R.; Tannous, A.; Moubayed, N.; Mouawad, N. Optimization of Energy Distribution with Demand Response Control In 6G Next Generation Smart Grids. In Proceedings of the EAI/Springer Proc. International Conference on Wireless Internet WICON, Athens, Greece, 15–16 December 2023. [Google Scholar]
- Bessem, S.; Marco, G.; Vasilis, F.; Dirk von, H.; Paul, A. SDN for 5g mobile networks: Norma perspective. In Proceedings of the 11th International Conference on Cognitive Radio Oriented Wireless Networks, CROWNCOM, Grenoble, France, 30 May–1 June 2016. [Google Scholar]
- Ersue, M. ETSI NFV management and orchestration—An overview. In Proceedings of the 88th IETF Meeting, Vancouver, BC, Canada, 3–8 November 2013. [Google Scholar]
- Elayoubi, S.; Maternia, M. 5G-PPP use cases and performance evaluation modeling. 5G PPP White Pap. 2016, 1, 81. [Google Scholar]
- Campolo, C.; Molinaro, A.; Iera, A.; Menichella, F. 5G network slicing for vehicle-to-everything services. Wirel. Commun. 2017, 24, 38–45. [Google Scholar] [CrossRef]
- Khan, H.; Luoto, P.; Bennis, M.; Latva-aho, M. On the application of network slicing for 5G-V2X. In Proceedings of the European Wireless 2018; 24th European Wireless Conference, VDE, Catania, Italy, 2–4 May 2018; pp. 1–6. [Google Scholar]
- Seremet, I.; Causevic, S. Benefits of using 5G network slicing to implement vehicle-to-everything (V2X) technology. In Proceedings of the 18th International Symposium INFOTEHJAHORINA (INFOTEH), Sarajevo, Bosnia and Herzegovina, 20–22 March 2019; pp. 1–6. [Google Scholar]
- Available online: Https://www.windpowercn.com/new-15kw-wind-turbine.asp (accessed on 1 September 2023).
- Olatomiwa, L.; Blanchard, R.; Mekhilef, S.; Akinyele, D. Hybrid renewable energy supply for rural healthcare facilities: An approach to quality healthcare delivery. Sustain. Energy Technol. Assess. 2018, 30, 121–138. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hour | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| u (m/s) | 6 | 6 | 6 | 7 | 7 | 8 | 8 | 12 | 13 | 15 | 19 | 19 |
| SI (w/m) | 0 | 0 | 0 | 0 | 0 | 57 | 254 | 446 | 621 | 766 | 89 | 971 |
| Hour | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| u (m/s) | 21 | 22 | 19 | 18 | 17 | 15 | 12 | 11 | 10 | 10 | 9 | 9 |
| SI (w/m) | 912 | 885 | 803 | 676 | 510 | 322 | 126 | 0 | 0 | 0 | 0 | 0 |
| Device Description | Quantity | Rated Power (W) | Total Power (W) | Total On-Time (h) | Total Energy (kWh) |
|---|---|---|---|---|---|
| Indoor Lighting | 8 | 15 | 120 | 8 | 0.96 |
| Outdoor Lighting | 6 | 40 | 240 | 12 | 2.88 |
| Ventilator | 7 | 60 | 420 | 8 | 3.36 |
| Blood bank refrigerator | 1 | 70 | 70 | 18 | 1.26 |
| Vaccine Refrigerator | 1 | 60 | 60 | 18 | 1.08 |
| Utility Refrigerator | 1 | 300 | 300 | 10 | 3.00 |
| Centrifuge | 1 | 242 | 242 | 3 | 0.73 |
| Microscope | 2 | 20 | 40 | 6 | 0.24 |
| Hematology Mixer | 1 | 28 | 28 | 4 | 0.11 |
| Hematology Analyzer | 1 | 230 | 230 | 4 | 0.92 |
| Lab Autoclave | 1 | 1500 | 1500 | 2 | 3.00 |
| Incubator | 1 | 400 | 400 | 5 | 2.00 |
| Oxygen Concentrator | 1 | 270 | 270 | 2 | 0.54 |
| Ultrasound machine | 1 | 800 | 800 | 2 | 1.60 |
| Vacuum Aspirator | 1 | 40 | 40 | 2 | 0.08 |
| Suction Apparatus | 1 | 100 | 100 | 2 | 0.20 |
| Desktop Computer | 1 | 150 | 150 | 5 | 0.75 |
| TV | 1 | 80 | 80 | 6 | 0.48 |
| Mobile Charger | 4 | 20 | 80 | 6 | 0.48 |
| VHF Radio Receiver | 1 | 30 | 30 | 4 | 0.12 |
| Feature | Details |
|---|---|
| Battery Type | Lithium-ion |
| Battery Capacity | 52 kWh |
| Charging Time | Fast charge Approx. 1 h 30 min at 50 kW, |
| (0–100 percent) | Regular charge Approx. 9 h 30 min at 7.4 kW |
| Life Cycle Estimated | around 3000 cycles |
| Reversible Energy | Yes: V2G compatible |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naja, R.; Soni, A.; Carletti, C. Electric Vehicles Energy Management for Vehicle-to-Grid 6G-Based Smart Grid Networks. J. Sens. Actuator Netw. 2023, 12, 79. https://doi.org/10.3390/jsan12060079
Naja R, Soni A, Carletti C. Electric Vehicles Energy Management for Vehicle-to-Grid 6G-Based Smart Grid Networks. Journal of Sensor and Actuator Networks. 2023; 12(6):79. https://doi.org/10.3390/jsan12060079
Chicago/Turabian StyleNaja, Rola, Aakash Soni, and Circe Carletti. 2023. "Electric Vehicles Energy Management for Vehicle-to-Grid 6G-Based Smart Grid Networks" Journal of Sensor and Actuator Networks 12, no. 6: 79. https://doi.org/10.3390/jsan12060079
APA StyleNaja, R., Soni, A., & Carletti, C. (2023). Electric Vehicles Energy Management for Vehicle-to-Grid 6G-Based Smart Grid Networks. Journal of Sensor and Actuator Networks, 12(6), 79. https://doi.org/10.3390/jsan12060079