
Output Feedback Stabilization of Doubly Fed Induction Generator Wind Turbines under Event-Triggered Implementations



Abstract
:1. Introduction
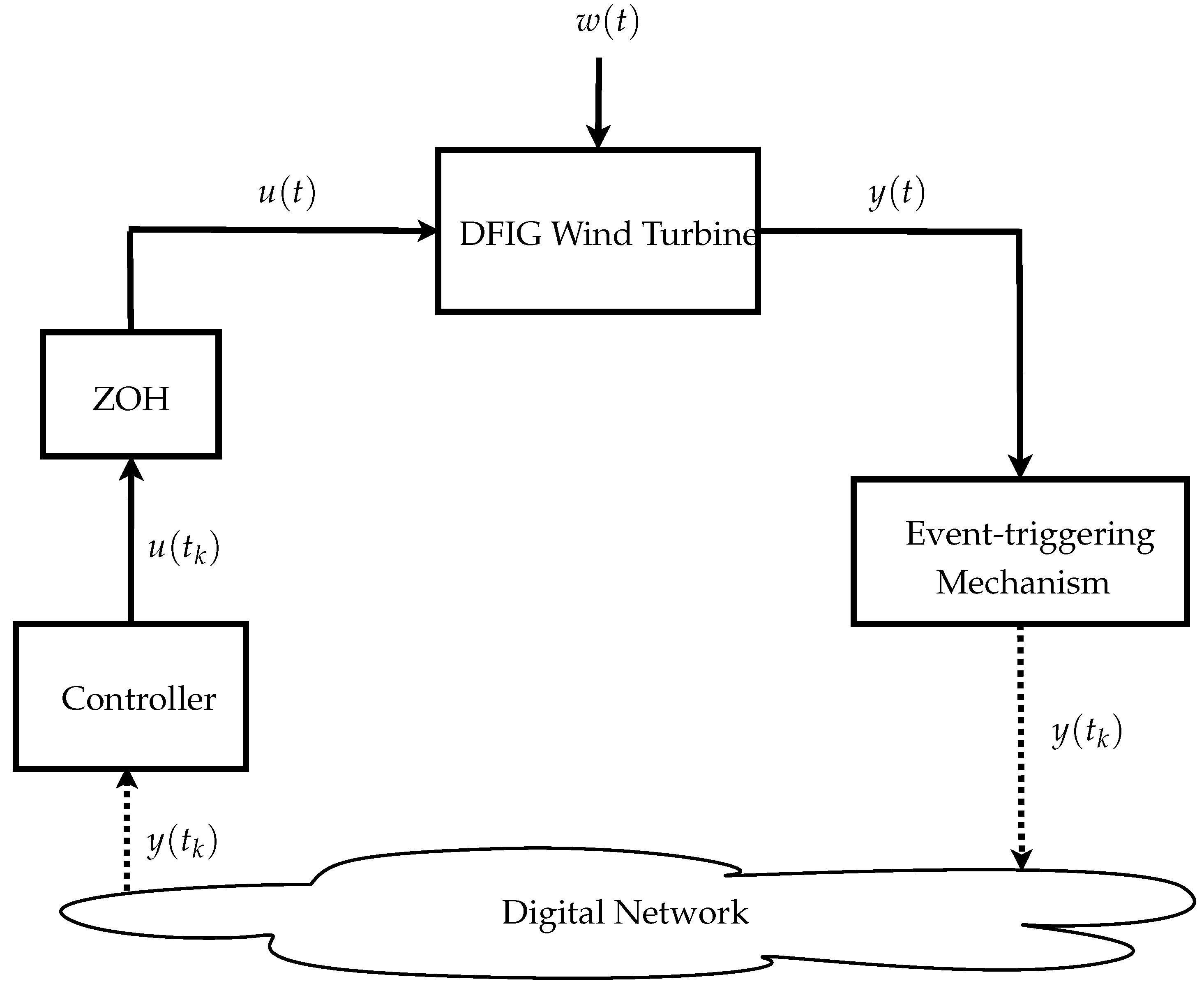
- An observer-based event-triggering mechanism is developed for a DFIG wind turbine.
- To capture the sampled data characteristic of the control system, the closed-loop system is described as a hybrid system.
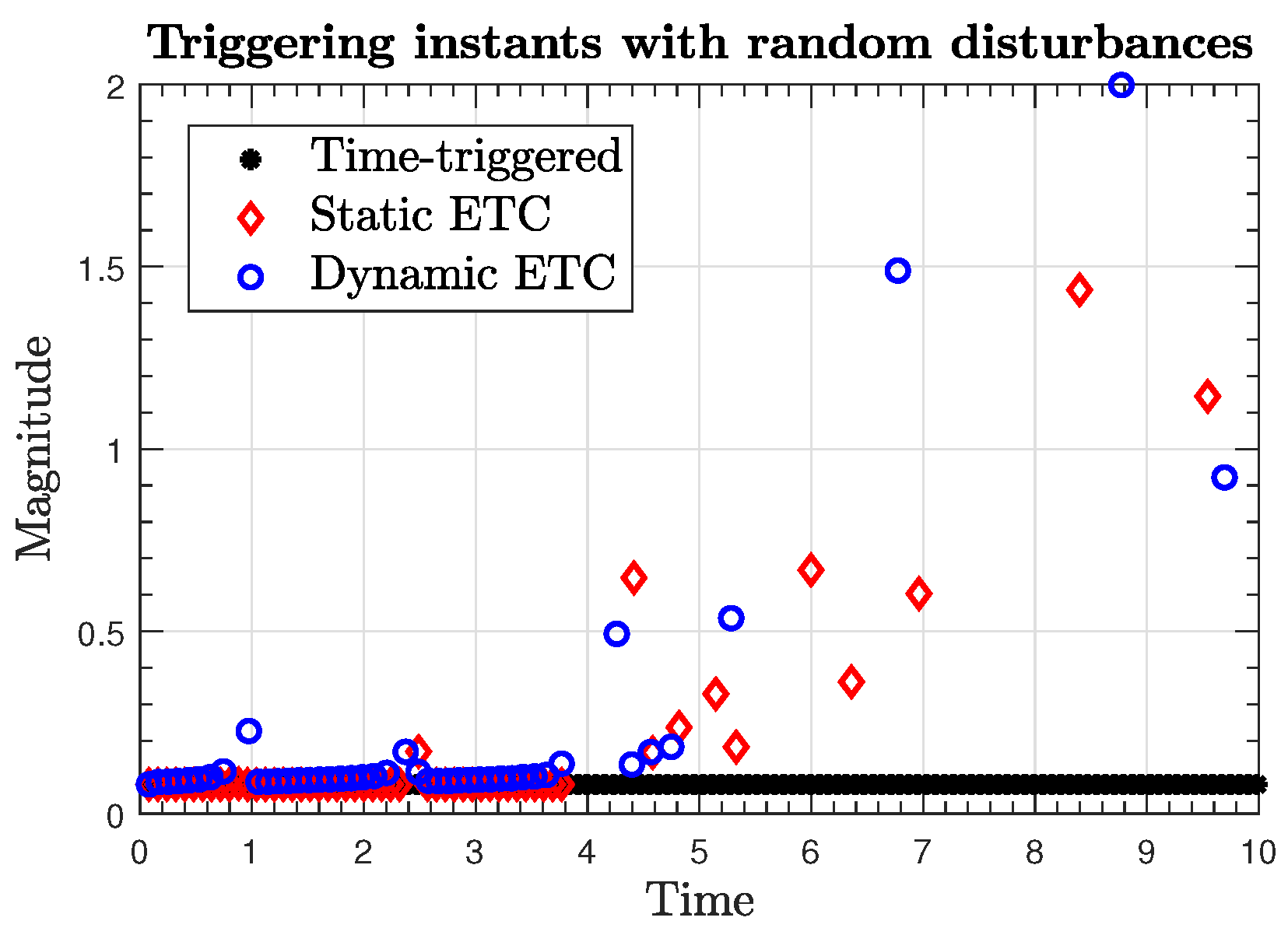
- The produced sampling times of the proposed approach are less than the traditional periodic time-triggered controllers.
- The developed ETC approach provides better performance compared to the existing results in terms of the stability guarantee and number of triggering instants.
- Time-triggered control, where an upper bound on the maximally allowable transmission interval is derived for periodic sampling implementation. Also, the corresponding hybrid model and the guaranteed stability property are presented in this case. This was not provided in [30].
2. Related Work
3. Preliminaries
4. System Model
5. Control Design
6. Hybrid Dynamical Model
7. Design of the Triggering Rules
7.1. Time-Triggered Control
7.2. Static Event-Triggering
7.3. Dynamic Event-Triggering
8. Results and Discussion
| Algorithm 1: Guidelines on how to apply the ETC approaches |
| Start |
| 1: Define the wind turbine parameters and compute the matrices in (5) |
| 2: Check controllability and observability |
| If the system is controllable and observable, do: |
| 1: Choose , and compute the controller gain K |
| 2: Choose , and compute the observer gain L |
| 3: Construct the matrices for the hybrid model (18) |
| 4: Check the feasibility of LMI (22) |
| If LMI is feasible, do: |
| 1: Find and compute |
| 2: Set the initial condition and start the simulation |
| End |
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Acronyms | |
| ARE | algebraic Riccati equation |
| ETC | event-triggered control |
| ETM | event-triggering mechanism |
| DFIG | doubly fed induction generator |
| LMI | linear matrix inequality |
| LTI | linear time-invariant |
| LQR | linear quadratic regulator |
| MATI | maximal allowable transmission interval |
| NCS | networked control system |
| RES | renewable energy sources |
| SDC | sampled-data control |
| SMC | sliding mode control |
| WT | wind turbine |
| ZOH | zero-order hold |
| List of Symbols | |
| pitch angle of WT | |
| angular speed of WT | |
| pitch angle command | |
| variation in power demand | |
| variation in wind speed | |
| time constant of WT blade | |
| J | moment of inertia of WT blade |
| load power demand | |
| inertia J at | |
| functions of WT parameters | |
| state vector of WT | |
| control input | |
| external disturbances on WT | |
| measured output of WT | |
| constant matrices of WT model | |
| sampling error | |
| triggering instant | |
| updated values of at | |
| estimated state by observer | |
| threshold constant for static ETC | |
| K | controller gain matrix |
| F | observer gain matrix |
| controllability matrix | |
| observability matrix | |
| J | quadratic cost function |
| controller LQR matrices | |
| observer LQR matrices | |
| dimension of plant state | |
| auxiliary time variable | |
| concatenated state vector | |
| flow set of the hybrid model | |
| jump set of the hybrid model | |
| T | periodic sampling interval |
| MATI bound | |
| dynamic variable to compute | |
| function of the sampling error | |
| Lyapunov function candidates | |
| dynamic ETC variable | |
| , | dynamic ETC functions |
References
- Abulizi, M.; Zhang, C.; Xie, L. Research of current control strategies for doubly-fed wind power generation system. In Proceedings of the 2023 IEEE 6th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 24–26 February 2023; Volume 6, pp. 55–59. [Google Scholar] [CrossRef]
- Ntuli, W.K.; Sharma, G.; Kabeya, M. Development of Grid–Connected Renewable Generation Control Techniques. In Proceedings of the 2022 IEEE PES/IAS PowerAfrica, Kigali, Rwanda, 22–26 August 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Badal, F.; Das, P.; Sarker, S.; Das, S. A survey on control issues in renewable energy integration and microgrid. Prot. Control Mod. Power Syst. 2019, 4, 8. [Google Scholar] [CrossRef]
- Mahfoud, S.; Derouich, A.; El Ouanjli, N.; Mossa, M.A.; Bhaskar, M.S.; Lan, N.K.; Quynh, N.V. A New Robust Direct Torque Control Based on a Genetic Algorithm for a Doubly-Fed Induction Motor: Experimental Validation. Energies 2022, 15, 5384. [Google Scholar] [CrossRef]
- Nadour, M.; Essadki, A.; Nasser, T. Comparative analysis between PI & backstepping control strategies of DFIG driven by wind turbine. Int. J. Renew. Energy Res. 2017, 7, 1307–1316. [Google Scholar]
- Hosseini, E.; Behzadfar, N.; Hashemi, M.; Moazzami, M.; Dehghani, M. Control of Pitch Angle in Wind Turbine Based on Doubly Fed Induction Generator Using Fuzzy Logic Method. J. Renew. Energy Environ. 2022, 9, 1–7. [Google Scholar]
- Abdelmalek, S.; Azar, A.T.; Dib, D. Fuzzy fault-tolerant control for doubly fed induction generator in wind energy conversion system. Int. J. Adv. Intell. Paradig. 2021, 20, 38–57. [Google Scholar] [CrossRef]
- Colombo, L.; Corradini, M.; Ippoliti, G.; Orlando, G. Pitch angle control of a wind turbine operating above the rated wind speed: A sliding mode control approach. ISA Trans. 2020, 96, 95–102. [Google Scholar] [CrossRef] [PubMed]
- Surinkaew, T.; Ngamroo, I. Robust power oscillation damper design for DFIG-based wind turbine based on specified structure mixed H2H∞ control. Renew. Energy 2014, 66, 15–24. [Google Scholar] [CrossRef]
- Rigatos, G.; Siano, P.; Abbaszadeh, M.; Wira, P. Nonlinear optimal control for wind power generators comprising a multi-mass drivetrain and a DFIG. J. Frankl. Inst. 2019, 356, 2582–2605. [Google Scholar] [CrossRef]
- Bouchemha, A.; Azar, A.T.; Laatra, Y.; Souaidia, C.; Dib, D. Sensor and sensorless speed control of doubly-fed induction machine. Int. J. Adv. Intell. Paradig. 2021, 19, 194–215. [Google Scholar] [CrossRef]
- Sami, I.; Ullah, S.; Ali, Z.; Ullah, N.; Ro, J. A Super Twisting Fractional Order Terminal Sliding Mode Control for DFIG-Based Wind Energy Conversion System. Energies 2020, 13, 2158. [Google Scholar] [CrossRef]
- Sami, I.; Ullah, S.; Ullah, N.; Ro, J. Sensorless fractional order composite sliding mode control design for wind generation system. ISA Trans. 2021, 111, 275–289. [Google Scholar] [CrossRef] [PubMed]
- Torchani, B.; Sellami, A.; Garcia, G. Variable speed wind turbine control by discrete-time sliding mode approach. ISA Trans. 2016, 62, 81–86. [Google Scholar] [CrossRef] [PubMed]
- Djilali, L.; Sanchez, E.N.; Belkheiri, M. Discrete-Time Neural Input Output Feedback Linearization Control for a DFIG based Wind Turbine. In Proceedings of the 2017 6th International Conference on Systems and Control (ICSC), Batna, Algeria, 7–9 May 2017; pp. 57–62. [Google Scholar]
- Ruiz-Cruz, R.; Sanchez, E.N.; Ornelas-Tellez, F.; Loukianov, A.G.; Harley, R.G. Particle Swarm Optimization for Discrete-Time Inverse Optimal Control of a Doubly Fed Induction Generator. IEEE Trans. Cybern. 2013, 43, 1698–1709. [Google Scholar] [CrossRef]
- Solís-Chaves, J.S.; Rodrigues, L.L.; Rocha-Osorio, C.M.; Filho, A.J.S. A long-range generalized predictive control algorithm for a DFIG based wind energy system. IEEE/CAA J. Autom. Sin. 2019, 6, 1209–1219. [Google Scholar] [CrossRef]
- Tohidi, A.; Hajieghrary, H.; Hsieh, M. Adaptive Disturbance Rejection Control Scheme for DFIG-Based Wind Turbine: Theory and Experiments. IEEE Trans. Ind. Appl. 2016, 52, 2006–2015. [Google Scholar] [CrossRef]
- Baillieul, J.; Antsaklis, P. Control and communication challenges in networked real-time systems. Proc. IEEE 2007, 95, 9–28. [Google Scholar] [CrossRef]
- Cloosterman, M.; Hetel, L.; van de Wouw, N.; Heemels, W.; Daafouz, J.; Nijmeijer, H. Controller synthesis for networked control systems. Automatica 2010, 46, 1584–1594. [Google Scholar] [CrossRef]
- Heemels, W.; Teel, A.; van de Wouw, N.; Nešić, D. Networked Control Systems with Communication Constraints: Tradeoffs between Transmission Intervals, Delays and Performance. IEEE Trans. Autom. Control 2010, 55, 1781–1796. [Google Scholar] [CrossRef]
- Forni, F.; Galeani, S.; Nešić, D.; Zaccarian, L. Event-triggered transmission for linear control over communication channels. Automatica 2014, 50, 490–498. [Google Scholar] [CrossRef]
- Abdelrahim, M.; Postoyan, R.; Daafouz, J.; Nešić, D. Event-triggered dynamic feedback controllers for nonlinear systems with asynchronous transmissions. In Proceedings of the 54th IEEE Conference on Decision and Control, Osaka, Japan, 15–18 December 2015; pp. 5494–5499. [Google Scholar] [CrossRef]
- Behera, A.K.; Bandyopadhyay, B.; Cucuzzella, M.; Ferrara, A.; Yu, X. A Survey on Event-Triggered Sliding Mode Control. IEEE J. Emerg. Sel. Top. Ind. Electron. 2021, 2, 206–217. [Google Scholar] [CrossRef]
- Fu, A.; Mazo, M., Jr. Decentralized periodic event-triggered control with quantization and asynchronous communication. Automatica 2018, 94, 294–299. [Google Scholar] [CrossRef]
- Li, F.; Fu, J.; Du, D. An improved event-triggered communication mechanism and control co-design for network control systems. Inf. Sci. 2016, 370-371, 743–762. [Google Scholar] [CrossRef]
- Dolk, V.; Abdelrahim, M.; Heemels, W. Event-triggered Consensus Seeking under Non-uniform Time-Varying Delays. IFAC-PapersOnLine 2017, 50, 10096–10101. [Google Scholar] [CrossRef]
- Dolk, V.; Borgers, D.; Heemels, W. Dynamic Event-triggered Control: Tradeoffs Between Transmission Intervals and Performance. In Proceedings of the IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 2764–2769. [Google Scholar]
- Goebel, R.; Sanfelice, R.; Teel, A. Hybrid Dynamical Systems: Modeling, Stability, and Robustness; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Abdelrahim, M.; Cucuzzella, M.; Almakhles, D. Output Feedback Event-triggered Control of Doubly Fed Induction Generators For Wind Turbines. In Proceedings of the 11th International Conference on Smart Grid (icSmartGrid 2023), Paris, France, 5–7 June 2023. [Google Scholar] [CrossRef]
- Nafiz Musarrat, M.; Fekih, A. Event-Triggered robust control scheme for sub-synchronous resonance mitigation in DFIG-based WECS. Int. J. Electr. Power Energy Syst. 2023, 148, 109006. [Google Scholar] [CrossRef]
- Dong, Z.; Li, Z.; Dong, Y.; Jiang, S.; Ding, Z. Fully-Distributed Deloading Operation of DFIG-Based Wind Farm for Load Sharing. IEEE Trans. Sustain. Energy 2021, 12, 430–440. [Google Scholar] [CrossRef]
- Xiong, L.; Li, J.; Li, P.; Huang, S.; Wang, Z.; Wang, J. Event-triggered prescribed time convergence sliding mode control of DFIG with disturbance rejection capability. Int. J. Electr. Power Energy Syst. 2021, 131, 106970. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Memon, A. Asynchronous sampled-data approach for event-triggered systems. Int. J. Control 2017, 90, 2508–2516. [Google Scholar] [CrossRef]
- Li, B.; Hu, S.; Zhong, Q.; Shi, K.; Zhong, S. Dynamic memory event-triggered proportional-integral-based H∞ load frequency control for multi-area wind power systems. Appl. Math. Comput. 2023, 453, 128070. [Google Scholar] [CrossRef]
- Fazeli, M.; Asher, G.; Klumpner, C.; Yao, L. Novel integration of DFIG-based wind generators within microgrids. IEEE Trans. Energy Convers. 2011, 26, 840–850. [Google Scholar] [CrossRef]
- Nešić, D.; Teel, A.; Carnevale, D. Explicit Computation of the Sampling Period in Emulation of Controllers for Nonlinear Sampled-Data Systems. IEEE Trans. Autom. Control 2009, 54, 619–624. [Google Scholar] [CrossRef]
- Carnevale, D.; Teel, A.; Nešić, D. A Lyapunov proof of an improved maximum allowable transfer interval for networked control systems. IEEE Trans. Autom. Control 2007, 52, 892–897. [Google Scholar] [CrossRef]
- Abdelrahim, M.; Postoyan, R.; Daafouz, J. Event-triggered control of nonlinear singularly perturbed systems based only on the slow dynamics. In Proceedings of the IFAC Symposium on Nonlinear Control Systems, Toulouse, France, 4–6 September 2013; pp. 347–352. [Google Scholar] [CrossRef]
- Abdelrahim, M.; Dolk, V.; Heemels, W. Input-to-state stabilizing event-triggered control for linear systems with output quantization. In Proceedings of the 55th IEEE Conference on Decision and Control, Las Vegas, NV, USA, 12–14 December 2016; pp. 483–488. [Google Scholar] [CrossRef]
- Dolk, V.; Borgers, D.; Heemels, W. Output-based and decentralized dynamic event-triggered control with guaranteed -gain performance and Zeno-freeness. IEEE Trans. Autom. Control 2017, 62, 34–49. [Google Scholar] [CrossRef]
- Lofberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation (IEEE Cat. No.04CH37508), Taipei, Taiwan, 2–4 September 2004; pp. 284–289. [Google Scholar] [CrossRef]
- Sanfelice, R.G.; Copp, D.; Nanez, P. A toolbox for simulation of hybrid systems in MATLAB/SIMULINK: Hybrid equations (HyEQ) toolbox (HSCC). In Proceedings of the 16th international conference on Hybrid systems: Computation and Control, Philadelphia, PA, USA, 8–11 April 2013; pp. 101–106. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [31] | [32] | [33] | [34] | [35] | Proposed Approach | |
|---|---|---|---|---|---|---|
| Problem | sub-synchronous resonance | power regulation | power control | pitch angle control | frequency regulation | pitch angle control |
| Control | sliding mode | load sharing | sliding mode | observer-based | observer-based | |
| Dynamics | linear | multi-agent | linear | linear | linear | linear |
| Modeling | continuous | continuous | continuous | continuous | continuous | hybrid |
| ETC mechanism | static | time-dependent | static | static | dynamic | static/dynamic |
| Stability | practical | asymptotic | practical | asymptotic | asymptotic | asymptotic |
| ETC performance compared to periodic | - | - | - | - | - | better performance ensured |
| Parameter | τβ | J | P0 | ω0 | M1 | M2 | M3 |
| Value | 1 s | 180 s | kW | 300 rad/s | 4054 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelrahim, M.; Almakhles, D. Output Feedback Stabilization of Doubly Fed Induction Generator Wind Turbines under Event-Triggered Implementations. J. Sens. Actuator Netw. 2023, 12, 64. https://doi.org/10.3390/jsan12050064
Abdelrahim M, Almakhles D. Output Feedback Stabilization of Doubly Fed Induction Generator Wind Turbines under Event-Triggered Implementations. Journal of Sensor and Actuator Networks. 2023; 12(5):64. https://doi.org/10.3390/jsan12050064
Chicago/Turabian StyleAbdelrahim, Mahmoud, and Dhafer Almakhles. 2023. "Output Feedback Stabilization of Doubly Fed Induction Generator Wind Turbines under Event-Triggered Implementations" Journal of Sensor and Actuator Networks 12, no. 5: 64. https://doi.org/10.3390/jsan12050064
APA StyleAbdelrahim, M., & Almakhles, D. (2023). Output Feedback Stabilization of Doubly Fed Induction Generator Wind Turbines under Event-Triggered Implementations. Journal of Sensor and Actuator Networks, 12(5), 64. https://doi.org/10.3390/jsan12050064