A Novel Indoor Structure Extraction Based on Dense Point Cloud



Abstract

1. Introduction
2. Related Studies
- (A) FSM
- (B) SSM
- (C) NSM
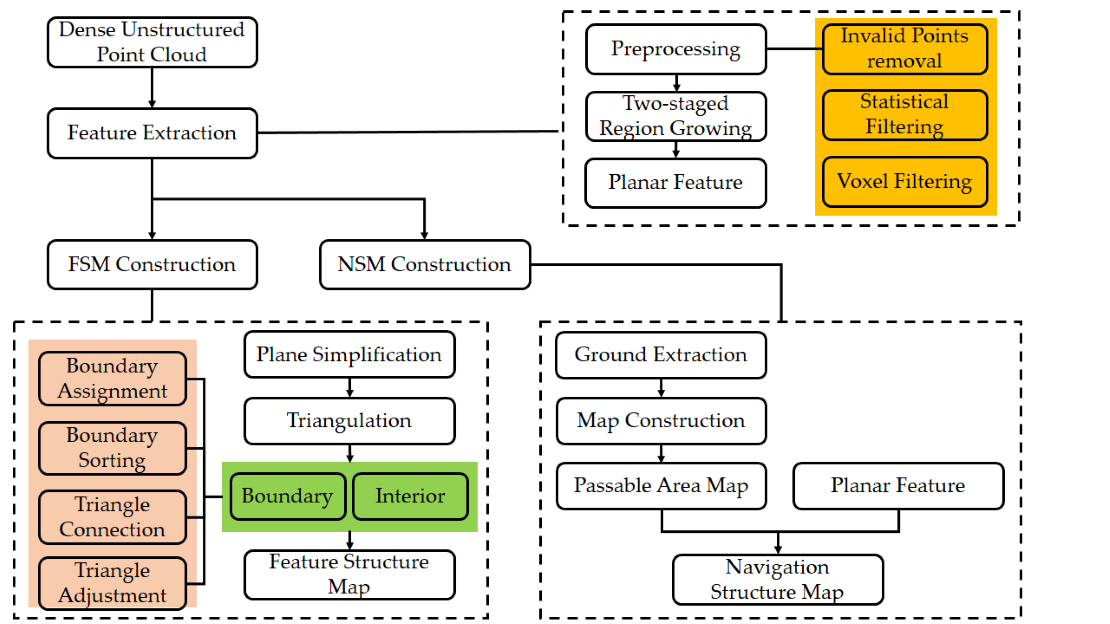
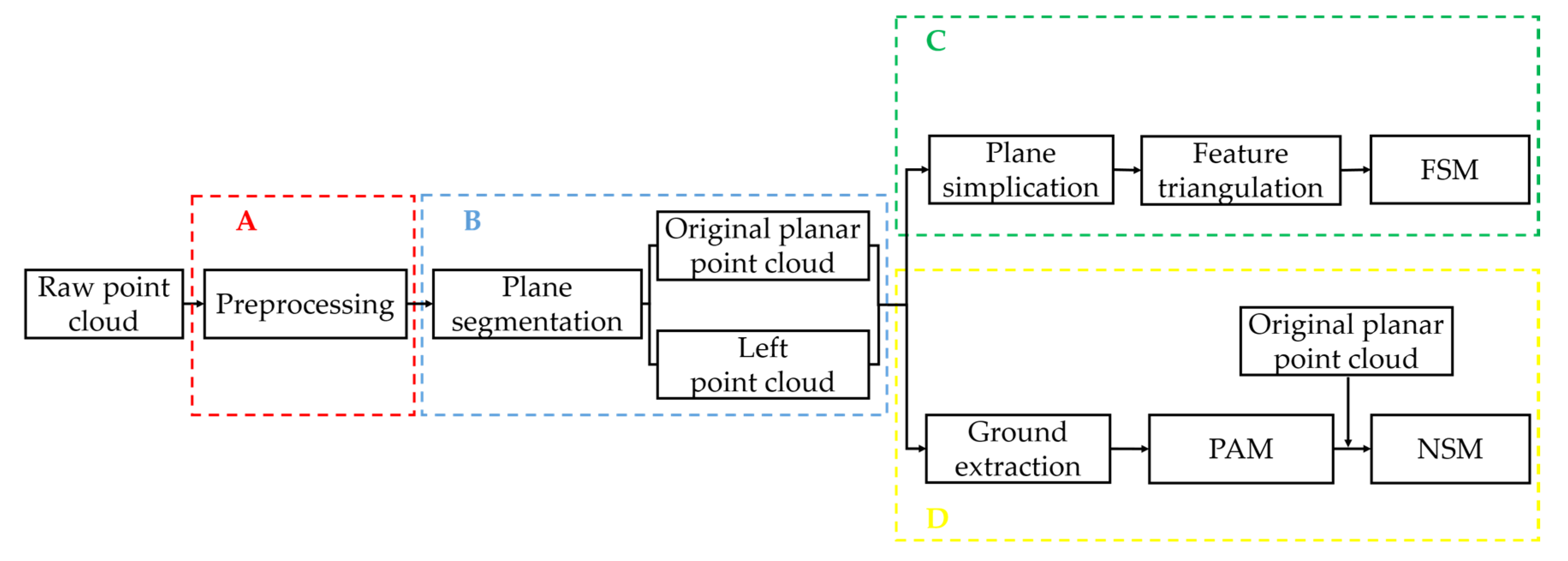
3. Method
- Preprocessing: the raw point cloud data are processed to eliminate invalid and noise points. Subsequently, the data volume is reduced significantly via downsampling.
- Plane segmentation: The planar structure is captured through a hybrid two-staged region-growing algorithm. Subsequently, the preprocessing point cloud is classified into the original plane and left point clouds.
- FSM construction: After plane segmentation, each planar point cloud is classified into inliers and boundaries. Subsequently, different triangulation strategies are adopted in the two parts. Finally, an FSM (e.g., a planar mesh model) based on a planar structure is generated.
- NSM construction: A novel ground plane is proposed based on indoor structure analysis under the Manhattan world assumption. Subsequently, an obstacle map within different heights and initial passable areas are constructed. Finally, a novel NSM comprising an original planar point cloud and a PAM is generated.
3.1. Preprocessing
3.2. Two-Staged Region Growing Plane Segmentation
3.2.1. Point-Based Region Growing
| Algorithm 1 Point-based region growing (Stage 1) |
| 1: Input: Point cloud , neighbor finding function , angle threshold |
| 2: distance threshold . |
| 3: Output: Preliminary segmented plane point cloud {} |
| 4: Initialize: ,, point normals |
| 5: , point curvature {}, region label {| |
| 6: }, {}, PCA (), EVD (), point order |
| 7: sort points according to curvature in ascending order. |
| 8: Candidate seeds , insert the minimum curvature point in to |
| 9: if there is still equals to −1 |
| 10: while is not empty do |
| 11: current seed the first element in , remove from |
| 12: for |
| 13: angle compute angle between |
| 14: if angle < |
| 15: insert to |
| 16: end if |
| 17: else |
| 18: dist compute distance between and the fitting local plane of |
| 19: if |
| 20: |
| 21: end if |
| 22: else |
| 23: −2 |
| 24: end else |
| 25: end else |
| 26: end for |
| 27: end while |
| 28: increases by 1 |
| 29: end if |
| 30: if > −1 |
| 31: Assemble to according to |
| 32: end if |
3.2.2. Plane-Based Region Growing
- (1)
- Remaining point updates
- (2)
- Plane Growing
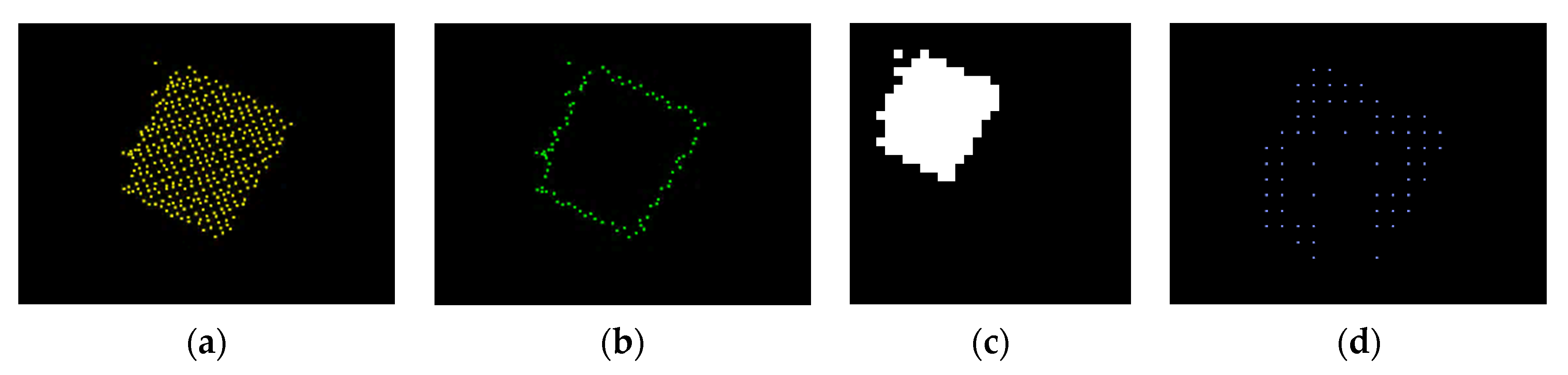
3.3. Plane Simplification
3.3.1. Orthographic Projection
3.3.2. Image Generation
3.3.3. Quadtree Segmentation
3.4. Feature Triangulation
3.4.1. Boundary Assignment
3.4.2. Boundary Sorting
3.4.3. Triangle Connection
3.4.4. Triangle Adjustment
3.5. NSM
3.5.1. Ground Extraction
- (1)
- Plane Grouping and Merging
- (2)
- Direction Correction
- (3)
- Indicator Calculation
3.5.2. Map Construction
- (1)
- Initial Passage Area Construction
- (2)
- PAM Construction
- (3).
- Construction of NSM
4. Experiment
4.1. Platform and Data Description
4.2. Parameter Setting
4.3. Experimental Results
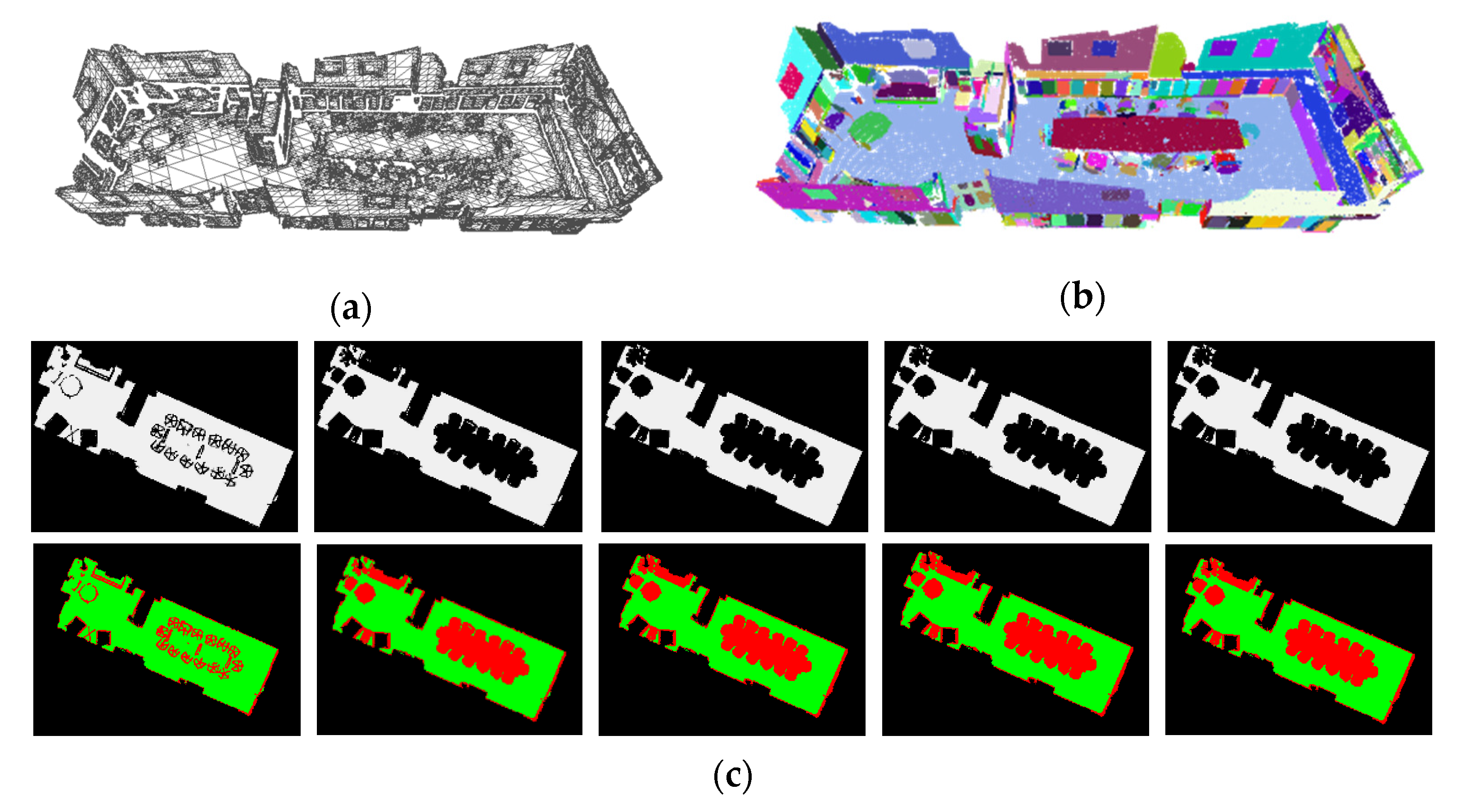
4.3.1. Real Dataset 1
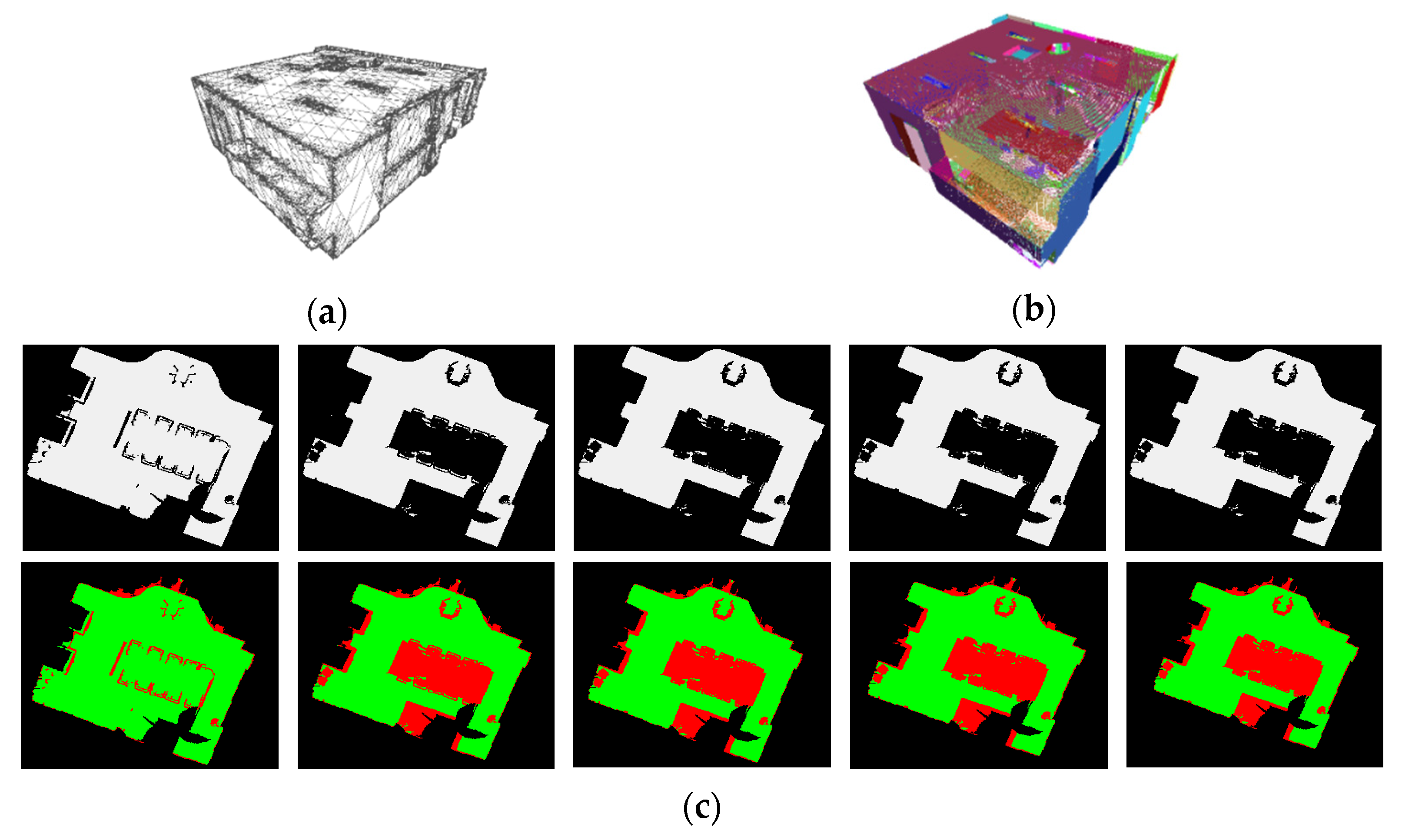
4.3.2. Real Dataset 2
4.3.3. Real Dataset 3
4.3.4. Real Dataset 4
5. Discussion
5.1. Performance of Plane Segmentation
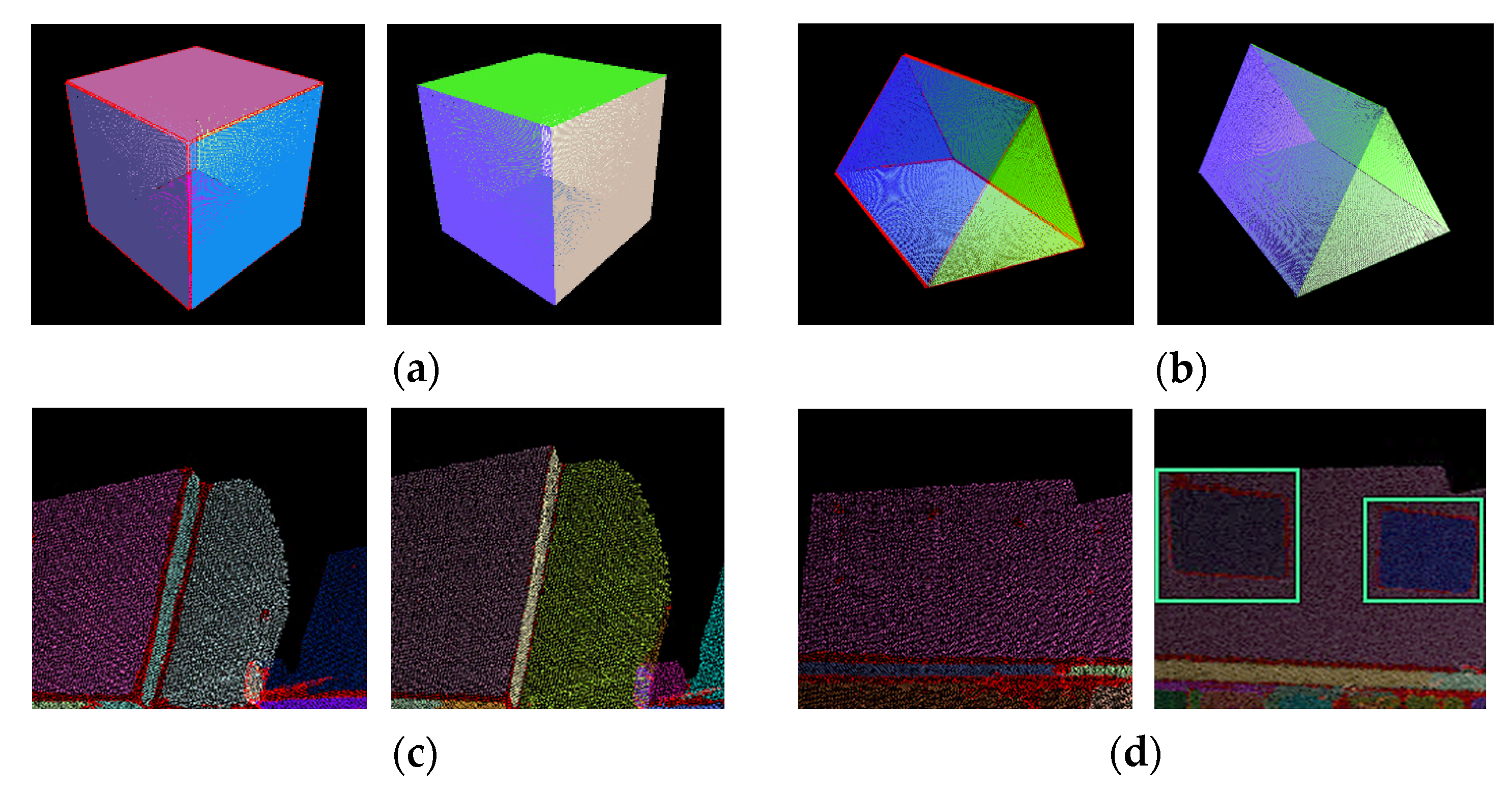
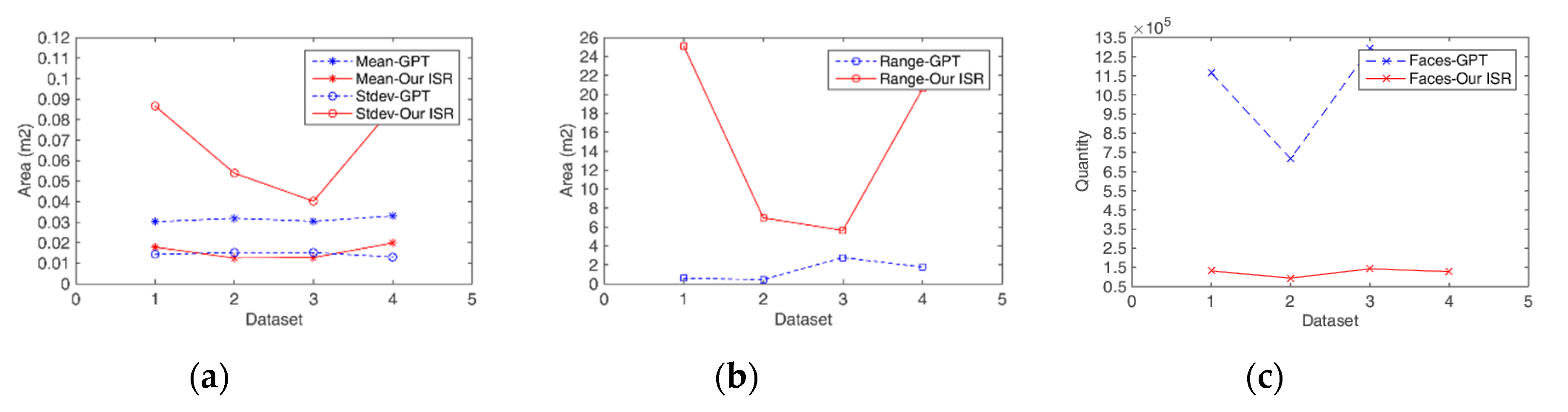
5.2. Triangulation Performance
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Österbring, M.; Thuvander, L.; Mata, É.; Wallbaum, H. Stakeholder Specific Multi-Scale Spatial Representation of Urban Building-Stocks. ISPRS Int. J. Geo-Inf. 2018, 7, 173. [Google Scholar] [CrossRef]
- Lehtola, V.V.; Kaartinen, H.; Nüchter, A.; Kaijaluoto, R.; Kukko, A.; Litkey, P.; Honkavaara, E.; Rosnell, T.; Vaaja, M.T.; Virtanen, J.-P.; et al. Comparison of the Selected State-Of-The-Art 3D Indoor Scanning and Point Cloud Generation Methods. Remote Sens. 2017, 9, 796. [Google Scholar] [CrossRef]
- Piccinni, G.; Avitabile, G.; Coviello, G.; Talarico, C. Modeling of a Re-Configurable Indoor Positioning System Based on Software Defined Radio Architecture. In Proceedings of the 2018 New Generation of CAS (NGCAS), Valletta, Malta, 20–23 November 2018; pp. 174–177. [Google Scholar] [CrossRef]
- Davis, J.; Marschner, S.R.; Garr, M.; Levoy, M. Filling holes in complex surfaces using volumetric diffusion. In Proceedings of the Symposium on 3D Data Processing, Visualization, and Transmission (3DPVT), Padova, Italy, 19–21 June 2002; pp. 428–441. [Google Scholar] [CrossRef]
- Kim, C.; Moon, H.; Lee, W. Data management framework of drone-based 3D model reconstruction of disaster site. In Proceedings of the 23rd International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences Congress (ISPRS), Prague, Czech Republic, 12–19 July 2016; pp. 31–33. [Google Scholar] [CrossRef]
- Samad, S.; Lim, S.; Sara, S. Implementation of Rapid As-built Building Information Modeling Using Mobile LiDAR. In Proceedings of the 2014 Construction Research Congress (CRC): Construction in a Global Network, Atlanta, GA, USA, 19–21 May 2014; pp. 209–218. [Google Scholar] [CrossRef]
- Chiabrando, F.; Di Pietra, V.; Lingua, A.; Cho, Y.; Jeon, J. An Original Application of Image Recognition Based Location in Complex Indoor Environments. ISPRS Int. J. Geo-Inf. 2017, 6, 56. [Google Scholar] [CrossRef]
- Gupta, T.; Li, H. Indoor mapping for smart cities—An affordable approach: Using Kinect Sensor and ZED stereo camera. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Lan, Z.; Yew, Z.J.; Lee, G.H. Robust Point Cloud Based Reconstruction of Large-Scale Outdoor Scenes. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 9682–9690. [Google Scholar] [CrossRef]
- Skuratovskyi, S.; Gorovyi, I.; Vovk, V.; Sharapov, D. Outdoor Mapping Framework: From Images to 3D Model. In Proceedings of the 2019 Signal Processing Symposium (SPSympo), Krakow, Poland, 17–19 September 2019; pp. 296–399. [Google Scholar] [CrossRef]
- Debaditya, A.; Kourosh, K.; Stephan, W. BIM-PoseNet: Indoor camera localisation using a 3D indoor model and deep learning from synthetic images. ISPRS J. Photogramm. Remote Sens. 2019, 150, 245–258. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, K.; Zhu, J.; Wang, J.; Guo, J.; Guo, Y. Data-Driven Indoor Scene Modeling from a Single Color Image with Iterative Object Segmentation and Model Retrieval. IEEE Trans. Vis. Comput. Graph. 2020, 26, 1702–1715. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Zhang, Y.; He, J.; Guo, J.; Guo, Y. Image-Based 3D Model Retrieval for Indoor Scenes by Simulating Scene Context. In Proceedings of the 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018; pp. 3658–3662. [Google Scholar] [CrossRef]
- Tran, H.; Khoshelham, K. Procedural Reconstruction of 3D Indoor Models from Lidar Data Using Reversible Jump Markov Chain Monte Carlo. Remote Sens. 2020, 12, 838. [Google Scholar] [CrossRef]
- Pang, M.; Luo, C.; Mei, X.; Lin, H. Acceleration of Shadowing Detection with Octree and Improved Specular Model for Indoor Propagation Using Point Cloud Data. In Proceedings of the 2018 IEEE International Conference on Computational Electromagnetics (ICCEM), Chengdu, China, 26–28 March 2018; pp. 1–3. [Google Scholar] [CrossRef]
- Kim, B.K. Indoor localization and point cloud generation for building interior modeling. In Proceedings of the 2013 IEEE RO-MAN, Gyeongju, Korea, 26–29 August 2013; pp. 186–191. [Google Scholar] [CrossRef]
- Poux, F.; Neuville, R.; Nys, G.-A.; Billen, R. 3D Point Cloud Semantic Modelling: Integrated Framework for Indoor Spaces and Furniture. Remote Sens. 2018, 10, 1412. [Google Scholar] [CrossRef]
- Díaz-Vilariño, L.; Martínez-Sánchez, J.; Lagüela, S.; Armesto, J.; Khoshelham, K. Door recognition in cluttered building interiors using imagery and lidar data. In Proceedings of the ISPRS Technical Commission V Symposium, Riva del Garda, Italy, 23–25 June 2014; pp. 203–209. [Google Scholar] [CrossRef]
- Dumitru, R.-C.; Nüchter, A. Interior reconstruction using the 3D Hough transform. In Proceedings of the 3D Virtual Reconstruction and Visualization of Complex Architectures (3D-ARCH), Trento, Italy, 25–26 February 2013; pp. 65–72. [Google Scholar]
- Li, J.; He, X.; Li, J. 2D LiDAR and camera fusion in 3D modeling of indoor environment. In Proceedings of the NAECON 2015—IEEE National Aerospace and Electronics Conference, Dayton, OH, USA, 15–19 June 2015; pp. 379–383. [Google Scholar] [CrossRef]
- Yang, L.; Cheng, H.; Su, J.; Li, X. Pixel-to-Model Distance for Robust Background Reconstruction. IEEE Trans. Circuits Syst. Video Technol. 2019, 26, 903–916. [Google Scholar] [CrossRef]
- Pollefeys, M.; Nister, M.; Frahm, J.M.; Akbarzadeh, A.; Mordohai, P.; Clipp, B.; Engels, C.; Gallup, D.; Kim, S.J.; Merrell, P.; et al. Detailed real-time urban 3D reconstruction from video. Int. J. Comput. Vis. 2008, 78, 143–167. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Wang, L. Online Reconstruction of Indoor Scenes from RGB-D Streams. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 3271–3279. [Google Scholar] [CrossRef]
- Ma, L.; Whelan, T.; Bondarev, E.; de With, P.H.N.; McDonald, J. Planar simplification and texturing of dense point cloud maps. In Proceedings of the 2013 European Conference on Mobile Robots, Barcelona, Spain, 25–27 September 2013; pp. 164–171. [Google Scholar] [CrossRef]
- Feichter, S.; Hlavacs, H. Planar Simplification of Indoor Point-Cloud Environments. In Proceedings of the 2018 IEEE International Conference on Artificial Intelligence and Virtual Reality (AIVR), Taichung, Taiwan, 10–12 December 2018; pp. 274–281. [Google Scholar] [CrossRef]
- Adan, A.; Huber, D. 3D Reconstruction of Interior Wall Surfaces under Occlusion and Clutter. In Proceedings of the 2011 International Conference on 3D Imaging, Modeling, Processing, Visualization and Transmission (3DIMPVT), Hangzhou, China, 16–19 May 2011; pp. 275–281. [Google Scholar] [CrossRef]
- Oesau, S.; Lafarge, F.; Alliez, P. Indoor Scene Reconstruction using Feature Sensitive Primitive Extraction and Graph-cut. ISPRS J. Photogramm. Remote Sens. 2014, 90, 68–82. [Google Scholar] [CrossRef]
- Shui, W.; Liu, J.; Ren, P.; Maddock, S.; Zhou, M. Automatic planar shape segmentation from indoor point clouds. In Proceedings of the 15th ACM SIGGRAPH Conference on Virtual-Reality Continuum and Its Applications in Industry, VRCAI, Zhuhai, China, 3–4 December 2016; pp. 363–372. [Google Scholar] [CrossRef]
- Georgios-Tsampikos, M.; Renato, P. Bayesian graph-cut optimization for wall surfaces reconstruction in indoor environments. Vis. Comput. 2017, 33, 1347–1355. [Google Scholar] [CrossRef]
- Zhou, K.; Gorte, B.; Zlatanova, S. Exploring Regularities for improving façade reconstruction from point clouds. In Proceedings of the 23rd International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences Congress (ISPRS), Prague, Czech Republic, 12–19 July 2016; pp. 749–755. [Google Scholar] [CrossRef]
- Ma, L.; Favier, R.; Do, L.; Bondarev, E.; de With, P.H.N. Plane segmentation and decimation of point clouds for 3D environment reconstruction. In Proceedings of the 2013 IEEE 10th Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2013; pp. 43–49. [Google Scholar] [CrossRef]
- Turner, E.; Zakhor, A. Watertight Planar Surface Meshing of Indoor Point-Clouds with Voxel Carving. In Proceedings of the 2013 International Conference on 3D Vision, Seattle, WA, USA, 29 June–1 July 2013; pp. 41–48. [Google Scholar] [CrossRef]
- Dimitrov, A.; Golparvar-Fard, M. Segmentation of building point cloud models including detailed architectural/structural features and MEP systems. Autom. Constr. 2015, 51, 32–45. [Google Scholar] [CrossRef]
- Poux, F.; Billen, R. Voxel-based 3D point cloud semantic segmentation: Unsupervised geometric and relationship featuring vs deep learning methods. ISPRS Int. J. Geo-Inf. 2019, 8, 213. [Google Scholar] [CrossRef]
- Papon, J.; Abramov, A.; Schoeler, M.; Worgotter, F. Voxel cloud connectivity segmentation—Supervoxels for point clouds. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Portland, OR, USA, 23–28 June 2013; pp. 2027–2034. [Google Scholar] [CrossRef]
- Vo, A.V.; Truong-Hong, L.; Laefer, D.F.; Bertolotto, M. Octree-based region growing for point cloud segmentation. ISPRS J. Photogramm. Remote Sens. 2015, 104, 88–100. [Google Scholar] [CrossRef]
- Armeni, I.; Sener, O.; Zamir, A.R.; Jiang, H.; Brilakis, I.; Fischer, M.; Savarese, S. 3D Semantic Parsing of Large-Scale Indoor Spaces. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1534–1543. [Google Scholar] [CrossRef]
- Ochmann, S.; Vock, R.; Wessel, R.; Tamke, M.; Klein, R. Automatic generation of structural building descriptions from 3D point cloud scans. In Proceedings of the 9th International Conference on Computer Graphics Theory and Applications, Lisbon, Portugal, 5–8 January 2014; pp. 120–127. Available online: https://cg.cs.uni-bonn.de/aigaion2root/attachments/GRAPP_2014_54_CR.pdf (accessed on 17 June 2020).
- Tchuinkou Kwadjo, D.; Tchinda, N.; Bobda, C.; Menadjou, N.; Fotsing, C.; Nziengam, N. From PC2BIM: Automatic Model generation from Indoor Point Cloud. In Proceedings of the 13th International Conference on Distributed Smart Cameras, Trento, Italy, 9–11 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, F.; Li, L.; Su, F.; Li, D.; Zhu, H.; Ying, S.; Zuo, X.; Tang, L. Semantic decomposition and recognition of indoor spaces with structural constraints for 3D indoor modelling. Autom. Constr. 2019, 106, 319–339. [Google Scholar] [CrossRef]
- Shi, W.; Ahmed, W.; Li, N.; Fan, W.; Xiang, H.; Wang, M. Semantic Geometric Modelling of Unstructured Indoor Point Cloud. ISPRS Int. J. Geo-Inf. 2019, 8, 9. [Google Scholar] [CrossRef]
- Wang, C.; Hou, S.; Wen, C.; Gong, Z.; Li, Q.; Sun, X.; Li, J. Semantic line framework-based indoor building modeling using backpacked laser scanning point cloud. ISPRS J. Photogramm. Remote Sens. 2018, 143, 150–166. [Google Scholar] [CrossRef]
- Xiong, X.; Huber, D. Using Context to Create Semantic 3D Models of Indoor Environments. In Proceedings of the 2010 21st British Machine Vision Conference, Aberystwyth, Wales, UK, 31 August–3 September 2010; pp. 45.1–45.11. [Google Scholar] [CrossRef]
- Cui, Y.; Li, Q.; Yang, B.; Xiao, W.; Chen, C.; Dong, Z. Automatic 3-D Reconstruction of Indoor Environment With Mobile Laser Scanning Point Clouds. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3117–3130. [Google Scholar] [CrossRef]
- Xiong, X.; Adan, A.; Akinci, B.; Huber, D. Automatic Creation of Semantically Rich 3D Building Models from Laser Scanner Data. Autom. Constr. 2013, 31, 325–337. [Google Scholar] [CrossRef]
- Yang, L.; Worboys, M. Generation of navigation graphs for indoor space. Int. J. Geogr. Inf. Sci. 2015, 29, 1737–1756. [Google Scholar] [CrossRef]
- Brawn, G.; Nagel, C.; Zlatanova, S.; Kolbe, T. Modelling 3D Topographic Space against Indoor Navigation Requirements. In Proceedings of the 7th International Workshop on 3D Geoinformation, Quebec City, QC, Canada, 16–17 May 2012; pp. 1–22. [Google Scholar] [CrossRef]
- Nikoohemat, S.; Diakité, A.; Zlatanova, S.; Vosselman, G. Indoor 3D Modeling and Flexible Space Subdivision from Point Clouds. In Proceedings of the 4th ISPRS Geospatial Week, Enschede, The Netherlands, 10–14 June 2019; pp. 285–292. [Google Scholar] [CrossRef]
- Diakité, A.A.; Zlatanova, S. Spatial subdivision of complex indoor environments for 3D indoor navigation. Int. J. Geogr. Inf. Sci. 2018, 32, 213–235. [Google Scholar] [CrossRef]
- Zlatanova, S.; Liu, L.; Sithole, G. A conceptual framework of space subdivision for indoor navigation. In Proceedings of the 5th ACM SIGSPATIAL International Workshop on Indoor SpatialAwareness, Orlando, FL, USA, 5 November 2013; pp. 37–41. [Google Scholar] [CrossRef]
- Taneja, S.; Akinci, B.; Garrett, J.; Soibelman, L. Algorithms for automated generation of navigation models from building information models to support indoor map-matching. Autom. Constr. 2016, 61, 24–41. [Google Scholar] [CrossRef]
- Flikweert, P.; Peters, R.; Díaz-Vilariño, L.; Voûte, R.; Staats, B. Automatic Extraction of A Navigation Graph Intended for IndoorGML From An Indoor Point Cloud. In Proceedings of the 4th ISPRS Geospatial Week, Enschede, The Netherlands, 10–14 June 2019; pp. 271–278. [Google Scholar] [CrossRef]
- Boguslawski, P.; Mahdjoubi, L.; Zverovich, V.; Fadli, F. Automated construction of variable density navigable networks in a 3D indoor environment for emergency response. Autom. Constr. 2016, 72, 115–128. [Google Scholar] [CrossRef]
- Li, F.; Wang, H.; Akwensi, P.H.; Kang, Z. Construction of Obstacle Element Map Based on Indoor Scene Recognition. In Proceedings of the 4th ISPRS Geospatial Week, Enschede, The Netherland, 10–14 June 2019; pp. 819–825. [Google Scholar] [CrossRef]
- Nakagawa, M.; Nozaki, R. Geometrical Network Model Generation Using Point Cloud Data for Indoor Navigation. In Proceedings of the 2018 ISPRS TC IV Mid-Term Symposium on 3D Spatial Information Science—The Engine of Change, Delft, The Netherlands, 1–5 October 2018; pp. 141–146. [Google Scholar] [CrossRef]
- Liu, L.; Zlatanova, S. Generating Navigation Models from Existing Building Data. In Proceedings of the 2013 ISPRS Acquisition and Modelling of Indoor and Enclosed Environments, Cape Town, South Africa, 11–13 December 2013; pp. 19–25. [Google Scholar] [CrossRef]
- Abdullah, A.; Sisi, Z.; Peter, V.; Ki-Joune, L. Improved and More Complete Conceptual Model for the Revision of IndoorGML. In Proceedings of the 10th International Conference on Geographic Information Science (GIScience 2018), Melbourne, Australia, 28–31 August 2018. [Google Scholar] [CrossRef]
- Walton, L.A.; Worboys, M. A Qualitative Bigraph Model for Indoor Space. In Proceedings of the 7th International Conference on Geographic Information Science (GIScience 2012), Columbus, OH, USA, 18–21 September 2012; pp. 226–240. [Google Scholar] [CrossRef]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for point-cloud shape detection. Comput. Graph. Forum 2007, 26, 214–226. [Google Scholar] [CrossRef]
- Okorn, B.E.; Xiong, X.; Akinci, B.; Huber, D. Toward automated modeling of floor plans. In Proceedings of the Symposium on 3D Data Processing, Visualization and Transmission, Paris, France, 17–20 May 2010; Available online: https://ri.cmu.edu/pub_files/2010/5/2009%203DPVT%20plan%20view%20modeling%20v13%20(resubmitted).pdf (accessed on 23 June 2020).
- Li, M.; Wonka, P.; Nan, L. Manhattan-world urban reconstruction from point clouds. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016; pp. 54–69. [Google Scholar] [CrossRef]
- Park, J.; Zhou, Q.; Koltun, V. Colored point cloud registration revisited. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 143–152. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage | Parameter | Value | |
|---|---|---|---|
| Preprocessing | Statistical filtering | Neighbor points | 50 |
| Voxel filtering | Voxel size /m | 0.02 | |
| FSM construction | Plane segmentation | Angle threshold /° | 3 |
| Distance threshold /m | 0.03 | ||
| Distance threshold /m | 0.004 | ||
| Point quantity threshold | 100 | ||
| Plane simplification | Neighbor points | 50 | |
| Image pixel resolution | 0.03 | ||
| NSM construction | Ground extraction | Plane group angle threshold | 10 |
| Plane merge distance threshold | 0.05 | ||
| Indicator ratio | 0.2 | ||
| Map construction | Minimum point number of cluster | 70 | |
| Image pixel resolution | 0.03 | ||
| Real Dataset | Number of Points in Original Dataset | Number of Planar Segments | Number of Patches in Mesh |
|---|---|---|---|
| 1. Boardroom | 9,268,856 | 563 | 142,055 |
| 2. Apartment | 8,560,872 | 384 | 130,924 |
| 3. Bedroom | 5,318,546 | 339 | 94,627 |
| 4. Reading room | 67,906,207 | 377 | 127,563 |
| Surface Id | Simulation Dataset 1 (Square) | Simulation Dataset 2 (Triangular Prism) | ||||
|---|---|---|---|---|---|---|
| Point Number | Point Number/ (Recall/%) | Point Number | Point Number/ (Recall/%) | |||
| Original Dataset | TRG | Our method | Original Dataset | TRG/ | Our Method | |
| 1 | 90,000 | 85,849(95.39) | 89,920(99.91) | 60,000 | 56,154(93.59) | 59,542(99.24) |
| 2 | 90,000 | 85,849(95.39) | 89,880(99.87) | 60,000 | 56,155(93.59) | 59,980(99.97) |
| 3 | 90,000 | 85,849(95.39) | 89,850(99.83) | 60,000 | 56,155(93.59) | 59,274(98.79) |
| 4 | 90,000 | 86,436(96.04) | 89,401(99.33) | 17,421 | 15,826(90.84) | 16,969(97.41) |
| 5 | 90,000 | 86,436(96.04) | 89,401(99.33) | 17,421 | 16,078(92.29) | 17,162(98.51) |
| 6 | 90,000 | 86,436(96.04) | 89,401(99.33) | - | - | - |
| Sum | 540,000 | 516,855(95.71) | 537,853(99.60) | 214,842 | 200,368(93.26) | 212,927(99.11) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, P.; Ye, Q.; Zeng, L. A Novel Indoor Structure Extraction Based on Dense Point Cloud. ISPRS Int. J. Geo-Inf. 2020, 9, 660. https://doi.org/10.3390/ijgi9110660
Shi P, Ye Q, Zeng L. A Novel Indoor Structure Extraction Based on Dense Point Cloud. ISPRS International Journal of Geo-Information. 2020; 9(11):660. https://doi.org/10.3390/ijgi9110660
Chicago/Turabian StyleShi, Pengcheng, Qin Ye, and Lingwen Zeng. 2020. "A Novel Indoor Structure Extraction Based on Dense Point Cloud" ISPRS International Journal of Geo-Information 9, no. 11: 660. https://doi.org/10.3390/ijgi9110660
APA StyleShi, P., Ye, Q., & Zeng, L. (2020). A Novel Indoor Structure Extraction Based on Dense Point Cloud. ISPRS International Journal of Geo-Information, 9(11), 660. https://doi.org/10.3390/ijgi9110660