Individual Behavior Simulation Based on Grid Object and Agent Model

Abstract
1. Introduction
2. Grid Object and Agent Model
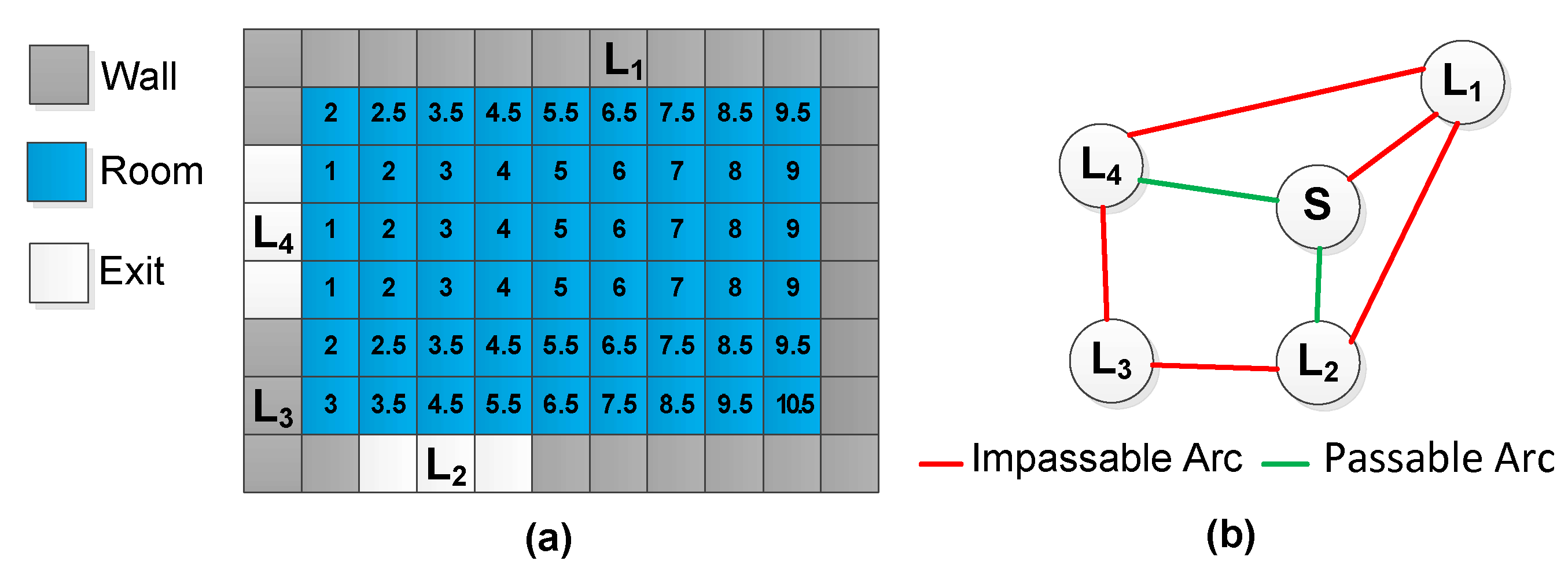
2.1. Modeling Environment in Individual Behavior Simulation
2.2. Modeling the Human in Individual Behavior Simulation
2.3. Interactions between the Human and the Environment in the GOAM
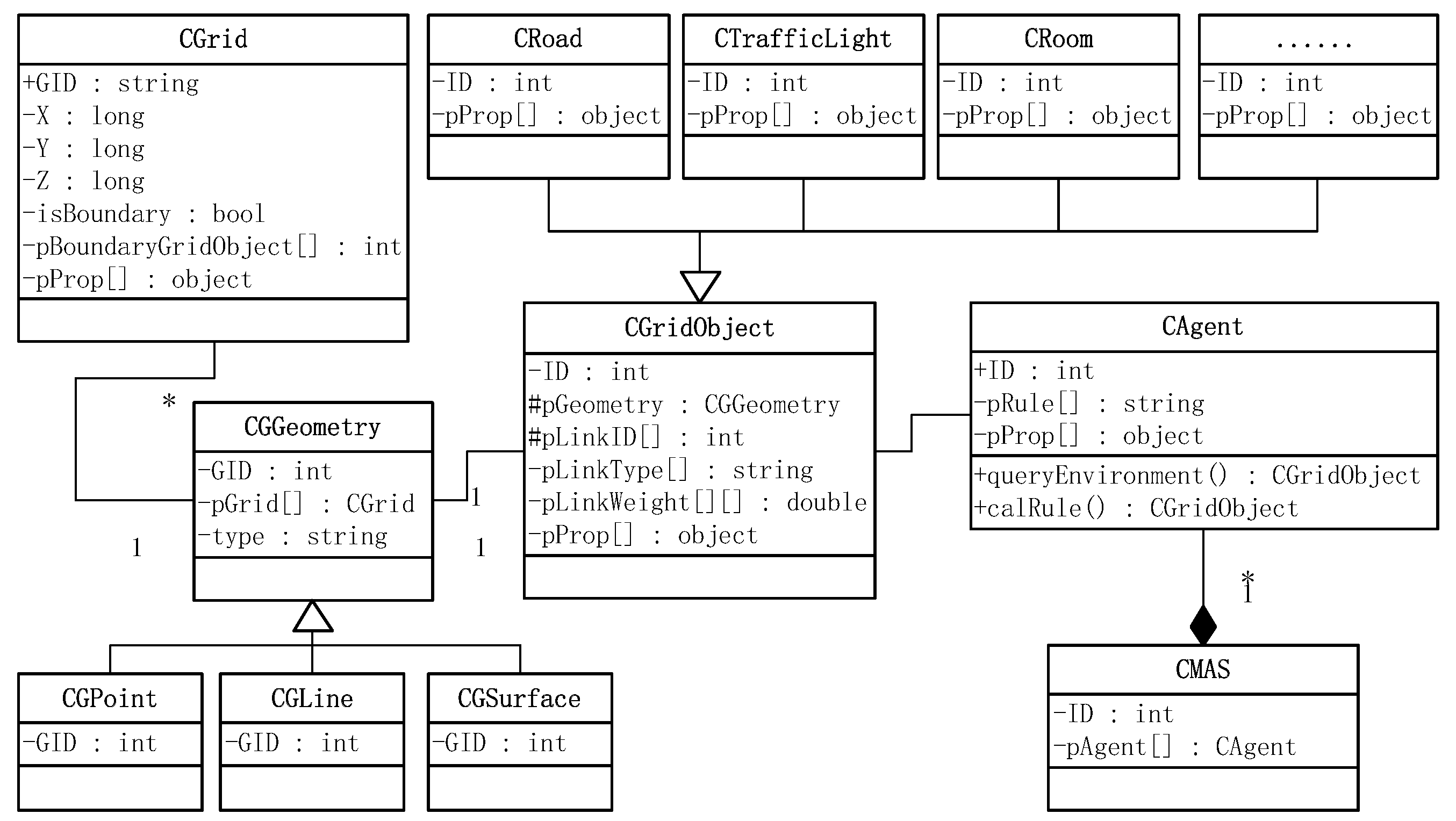
2.4. Unified Modeling Language Class Diagram Graph of the GOAM
3. The Prototype System and Case Study with GOAM
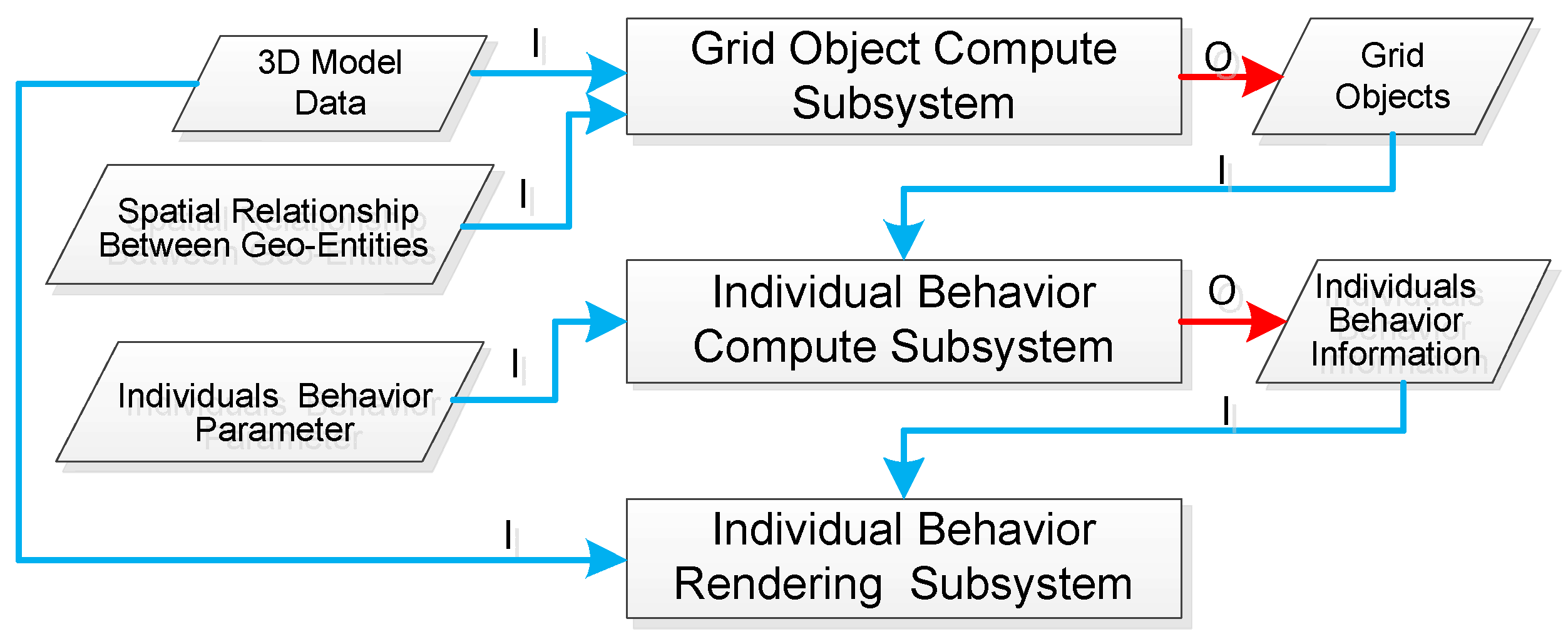
3.1. The Prototype System with GOAM
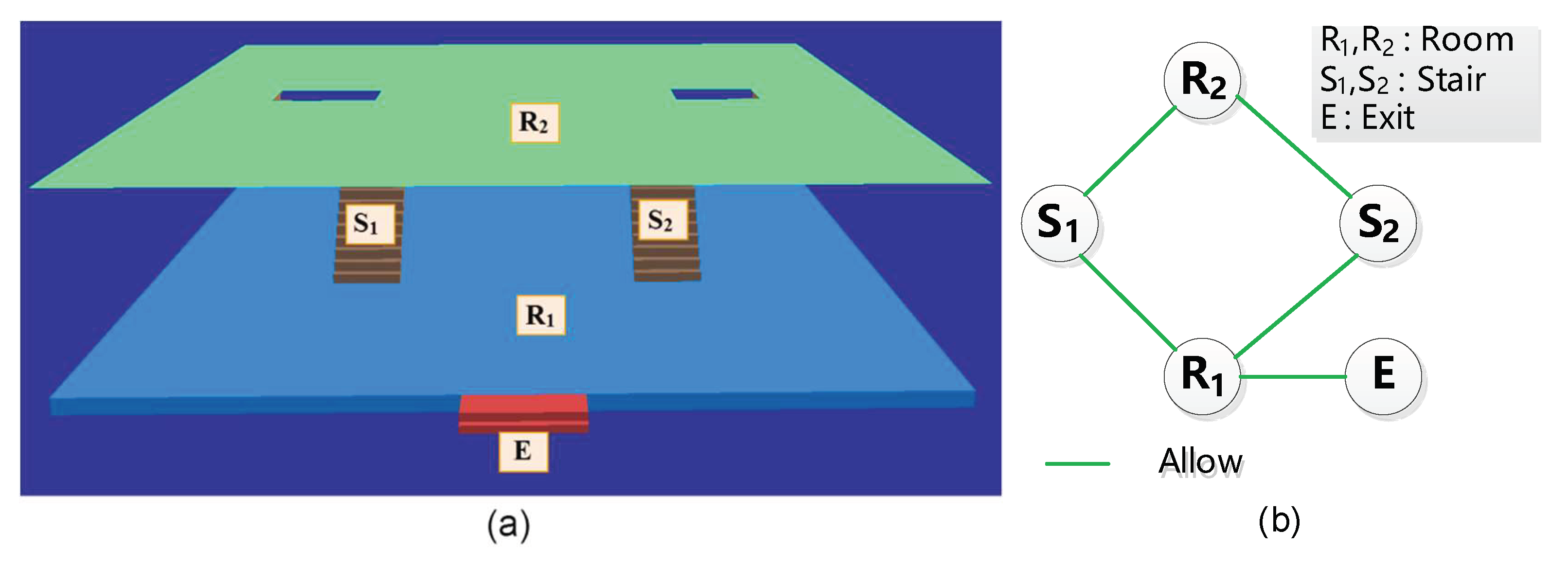
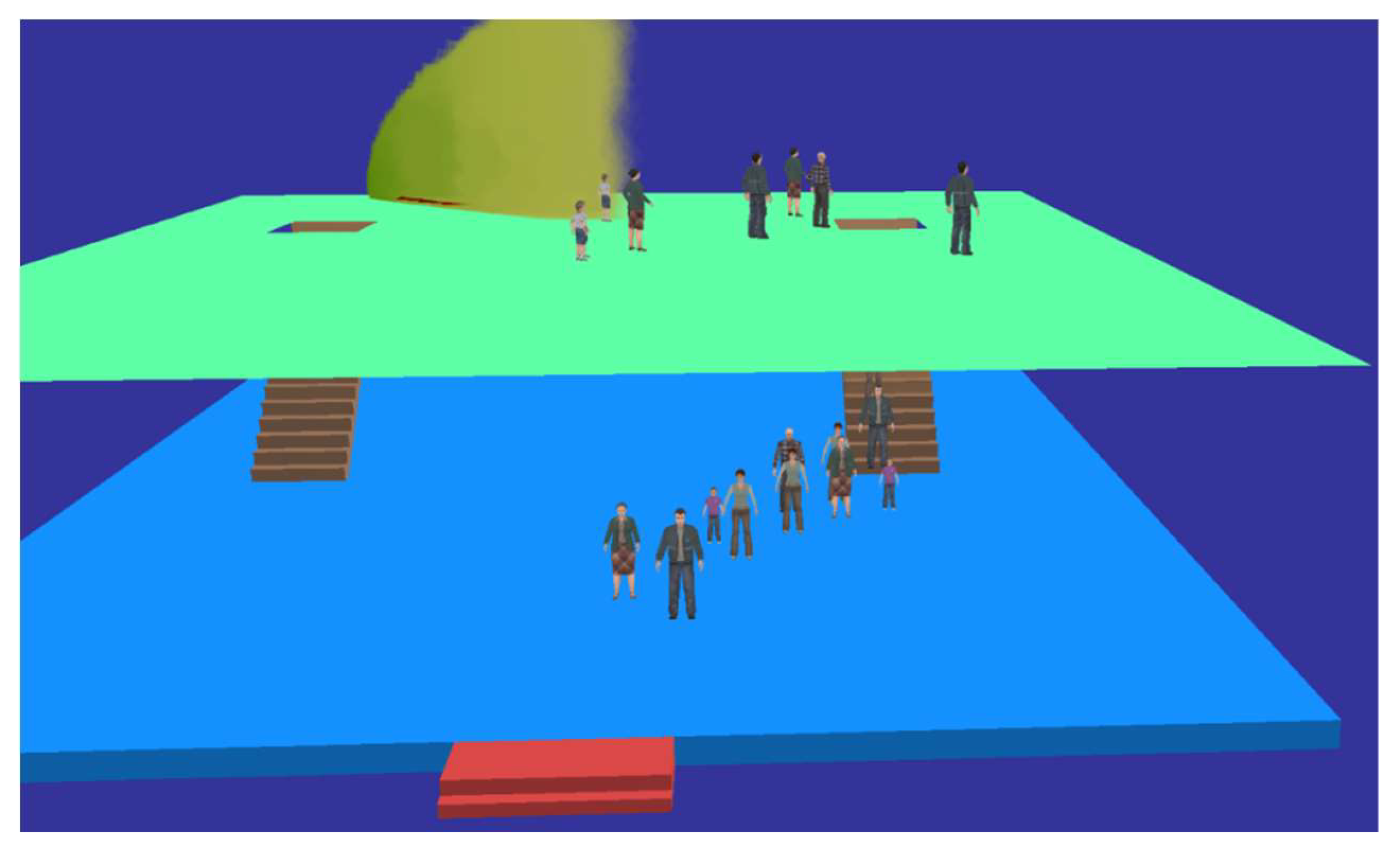
3.2. Case 1: Individual Behavior Simulation in a Multi-Story Building
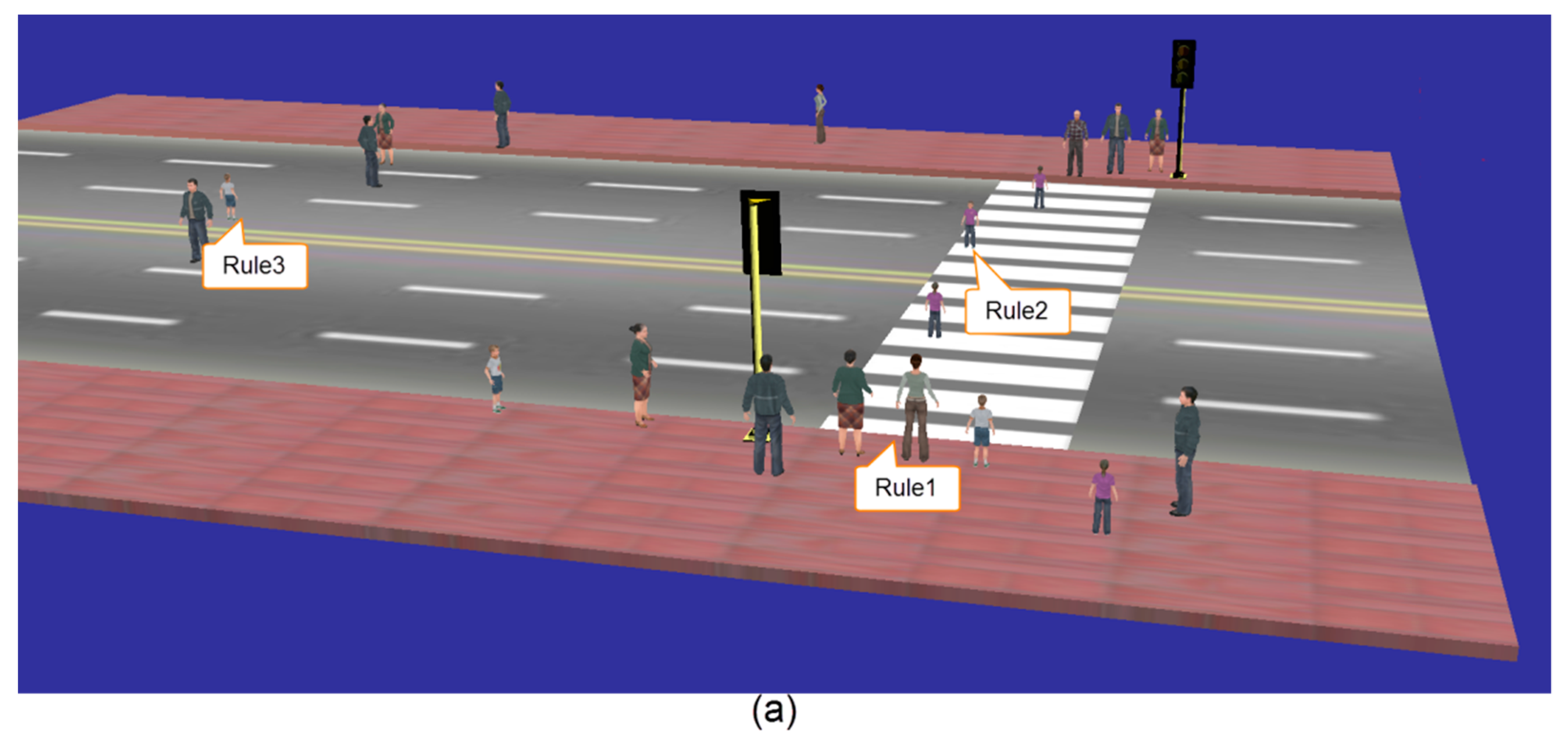
3.3. Case 2: Individual Behavior Simulation on the Outdoors Road
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chow, T.E. A crowdsourcing–geocomputational framework of mobile crowd simulation and estimation. Cartogr. Geogr. Inf. Sci. 2019, 46, 2–20. [Google Scholar] [CrossRef]
- Moulin, B.; Chaker, W.; Perron, J.; Pelletier, P.; Hogan, J.; Gbei, E. Mags project: Multi-agent geosimulation and crowd simulation. Spat. Inf. Theory Found. Geogr. Inf. Sci. 2003, 2825, 151–168. [Google Scholar]
- Lu, L.; Chan, C.-Y.; Wang, J.; Wang, W. A study of pedestrian group behaviors in crowd evacuation based on an extended floor field cellular automaton model. Transp. Res. Part C Emerg. Technol. 2017, 81, 317–329. [Google Scholar] [CrossRef]
- Karamouzas, I.; Sohre, N.; Narain, R.; Guy, S.J. Implicit crowds: Optimization integrator for robust crowd simulation. ACM Trans. Graph. (TOG) 2017, 36, 136. [Google Scholar] [CrossRef]
- Thalmann, D. Crowd Simulation; Wiley Online Library: Hoboken, NJ, USA, 2007. [Google Scholar]
- Gwynne, S.; Galea, E.; Lawrence, P.; Filippidis, L. Modelling occupant interaction with fire conditions using the buildingexodus evacuation model. Fire Saf. J. 2001, 36, 327–357. [Google Scholar] [CrossRef]
- Thompson, P.A.; Marchant, E.W. Testing and application of the computer model ‘simulex’. Fire Saf. J. 1995, 24, 149–166. [Google Scholar] [CrossRef]
- Guy, S.J.; Lin, M.C.; Manocha, D. Modeling collision avoidance behavior for virtual humans. In Proceedings of the 9th International Conference on Autonomous Agents and Multiagent Systems, Toronto, ON, Canada, 10–14 May 2010; pp. 575–582. [Google Scholar]
- Reynolds, C. Opensteer: Steering Behaviors for Autonomous Characters. 2004. Available online: http://opensteer.sourceforge.net (accessed on 24 April 2019).
- Song, Y.-Q.; Niu, L.; He, L.; Wang, R. A grid-based graph data model for pedestrian route analysis in a micro-spatial environment. Int. J. Automat. Comput. 2016, 13, 296–304. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, W.; Ebert, D.S.; Peng, Q. Conservative voxelization. Visual Comp. 2007, 23, 783–792. [Google Scholar] [CrossRef]
- Bonabeau, E. Agent-based modeling: Methods and techniques for simulating human systems. Proc. Nat. Acad. Sci. USA 2002, 99, 7280–7287. [Google Scholar] [CrossRef]
- Sakuma, T.; Mukai, T.; Kuriyama, S. Psychological model for animating crowded pedestrians. J. Vis. Comp. Animat. 2005, 16, 343–351. [Google Scholar] [CrossRef]
- Hollmann, C. A Cognitive Human Behaviour Model for Pedestrian Behaviour Simulation. Ph.D. Thesis, University of Greenwich, London, UK, 2015. [Google Scholar]
- Martz, P. Openscenegraph Quick Start Guide: A Quick Introduction to the Cross-Platform Open Source Scene Graph Api; Skew Matrix Software: Louisville, CO, USA, 2007. [Google Scholar]
- Hoogendoorn, S.P.; Bovy, P.H. Pedestrian travel behavior modeling. Netw. Spat. Econ. 2005, 5, 193–216. [Google Scholar] [CrossRef]
- Daamen, W. Modelling Passenger Flows in Public Transport Facilities; TU Delft, Delft University of Technology: Delft, The Netherlands, 2004. [Google Scholar]
- Miller, H.J.; Shaw, S.L. Geographic Information Systems for Transportation: Principles and Applications; Oxford University Press: New York, NY, USA, 2001. [Google Scholar]
- Kirchner, A.; Schadschneider, A. Simulation of evacuation processes using a bionics-inspired cellular automaton model for pedestrian dynamics. Phys. A Stat. Mech. Appl. 2002, 312, 260–276. [Google Scholar] [CrossRef]
- Helbing, D.; Molnar, P. Social force model for pedestrian dynamics. Phys. Rev. E 1995, 51, 4282–4286. [Google Scholar] [CrossRef] [PubMed]
- Bosanquet, C.; Pearson, J. The spread of smoke and gases from chimneys. Trans. Faraday Soc. 1936, 32, 1249–1263. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filed | Description |
|---|---|
| ID | The unique identifier for this grid object. |
| pGeometry | The set of grids contained in this object. Each grid contains the information listed of X (the row number of this grid), Y (the column number of this grid), Z (the elevation value of this grid), isBoundary (a Boolean value denoting whether this grid is a boundary grid), pBoundaryGridObject[] (when isBoundary is true, the list of grid objects adjacent to this grid), and pProp[] (other properties of this grid). |
| pLinkID[] | The set of other grid objects connected to this object, stored as an array. |
| pLinkType[] | The connection states of the arcs corresponding to pLinkID[]. The value of the connection state is either passable, impassable or conditional. |
| pLinkWeight[][] | The link distance weight corresponding to pLinkID[], stored in a hash table. |
| pProp[] | Other properties of this object, such as its name. |
| Filed or Method | Description |
|---|---|
| ID | The unique identifier for this individual. |
| pRule[] | The sets of rules for the individual behavior. |
| pProp[] | The set of individual attributes. |
| queryEnvironment() | The method for environmental perception. |
| calRule() | The method to compute the behavior rules of the individual (See Section 3.1.). |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Niu, L.; Li, Y. Individual Behavior Simulation Based on Grid Object and Agent Model. ISPRS Int. J. Geo-Inf. 2019, 8, 388. https://doi.org/10.3390/ijgi8090388
Song Y, Niu L, Li Y. Individual Behavior Simulation Based on Grid Object and Agent Model. ISPRS International Journal of Geo-Information. 2019; 8(9):388. https://doi.org/10.3390/ijgi8090388
Chicago/Turabian StyleSong, Yiquan, Lei Niu, and Yi Li. 2019. "Individual Behavior Simulation Based on Grid Object and Agent Model" ISPRS International Journal of Geo-Information 8, no. 9: 388. https://doi.org/10.3390/ijgi8090388
APA StyleSong, Y., Niu, L., & Li, Y. (2019). Individual Behavior Simulation Based on Grid Object and Agent Model. ISPRS International Journal of Geo-Information, 8(9), 388. https://doi.org/10.3390/ijgi8090388