V-Factor Indicator in the Assessment of the Change in the Attractiveness of View as a Result of the Implementation of a Specific Planning Scenario


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials
3. Methods
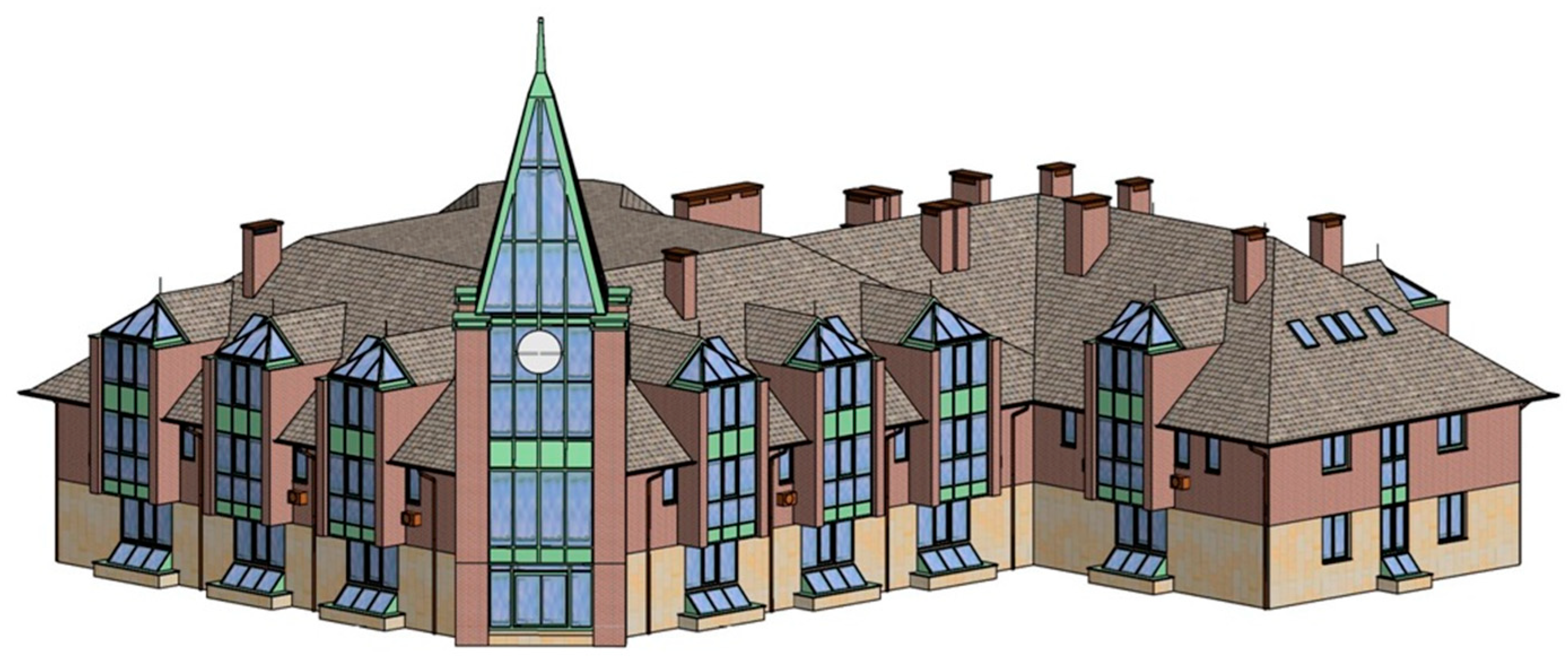
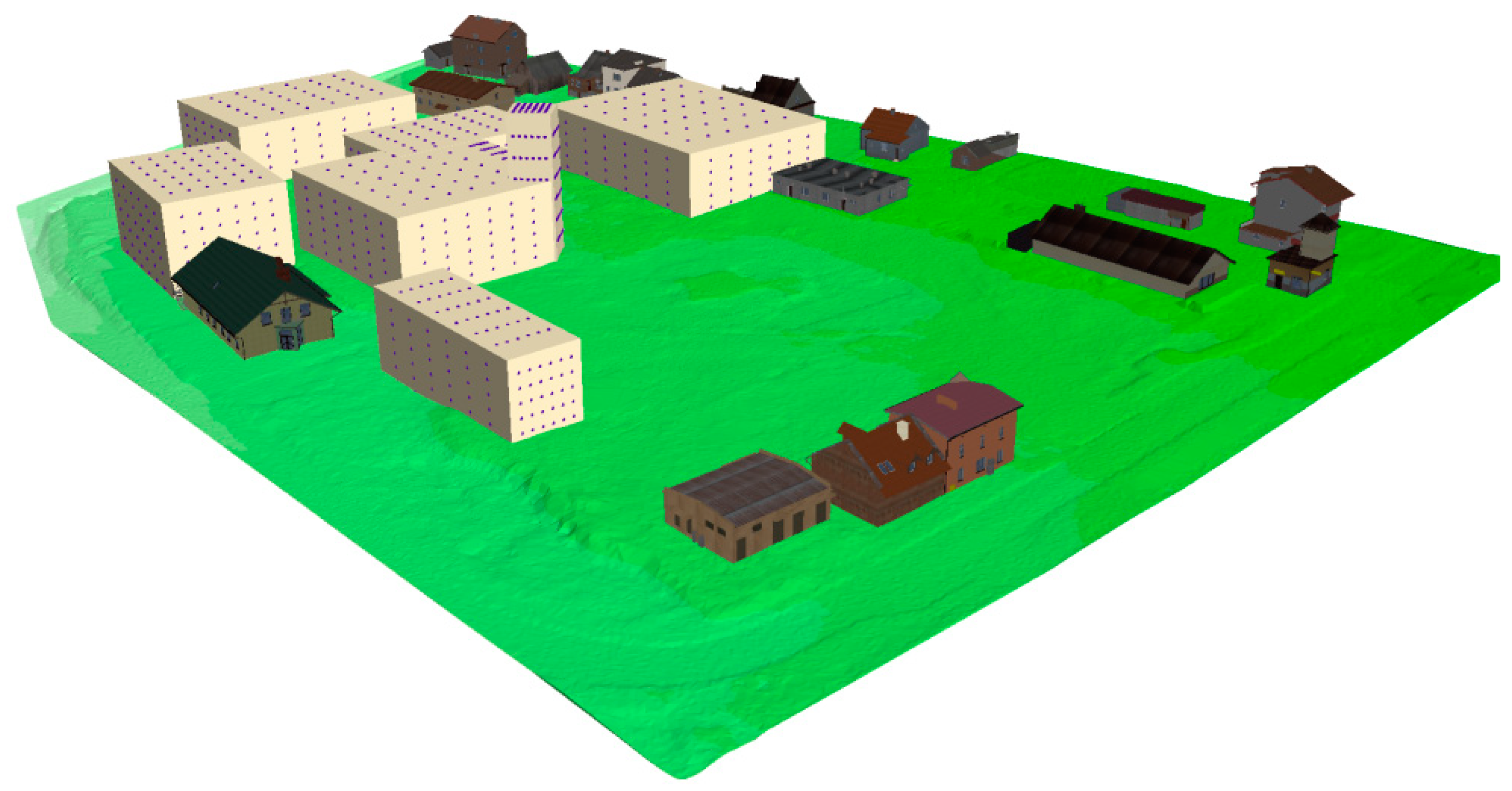
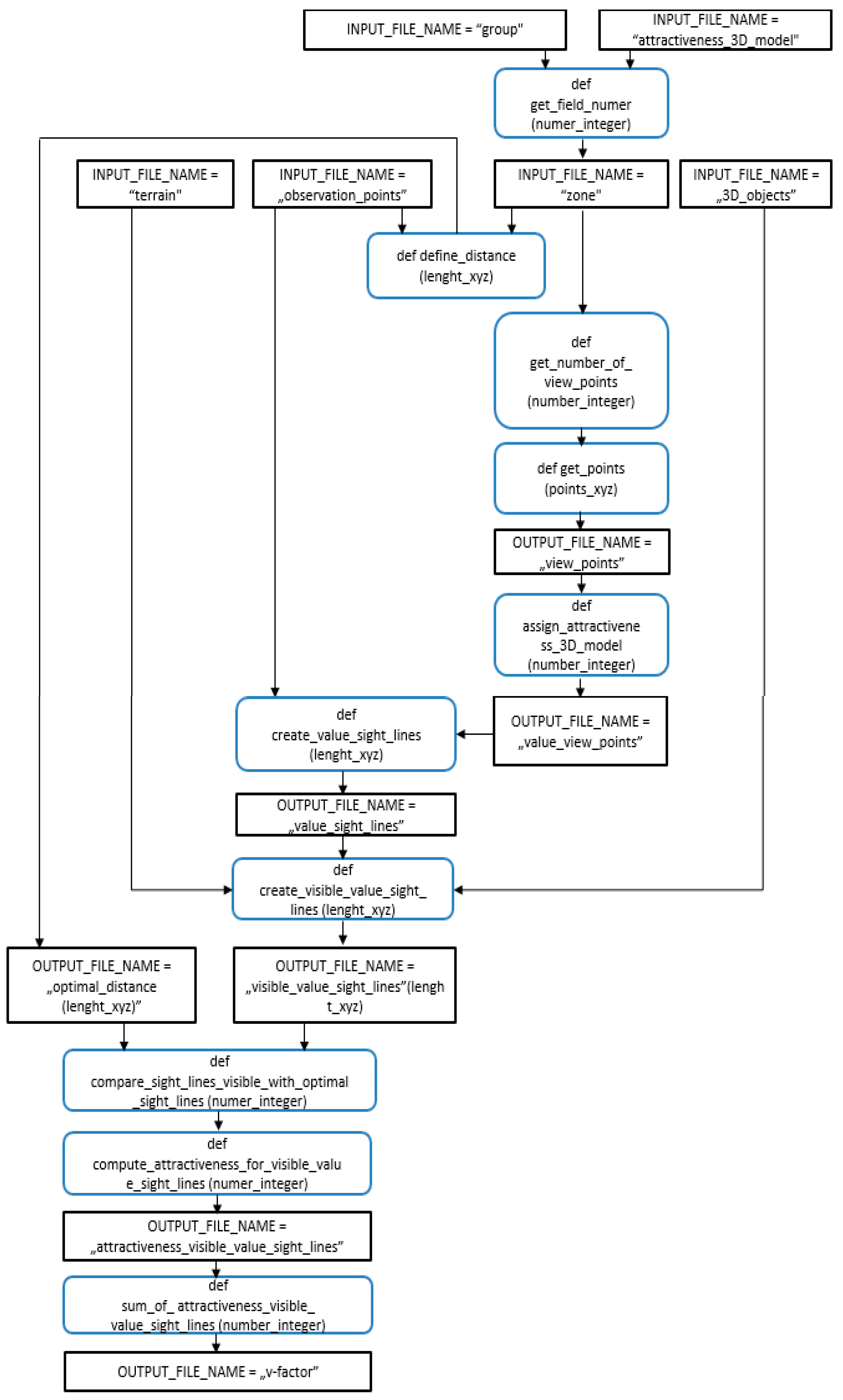
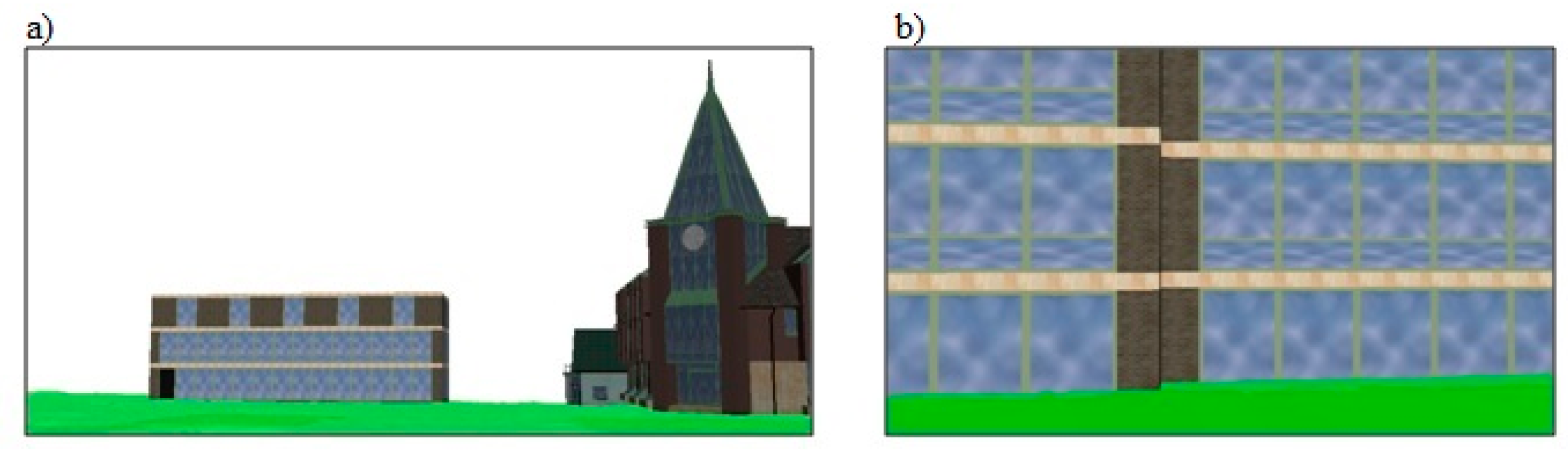
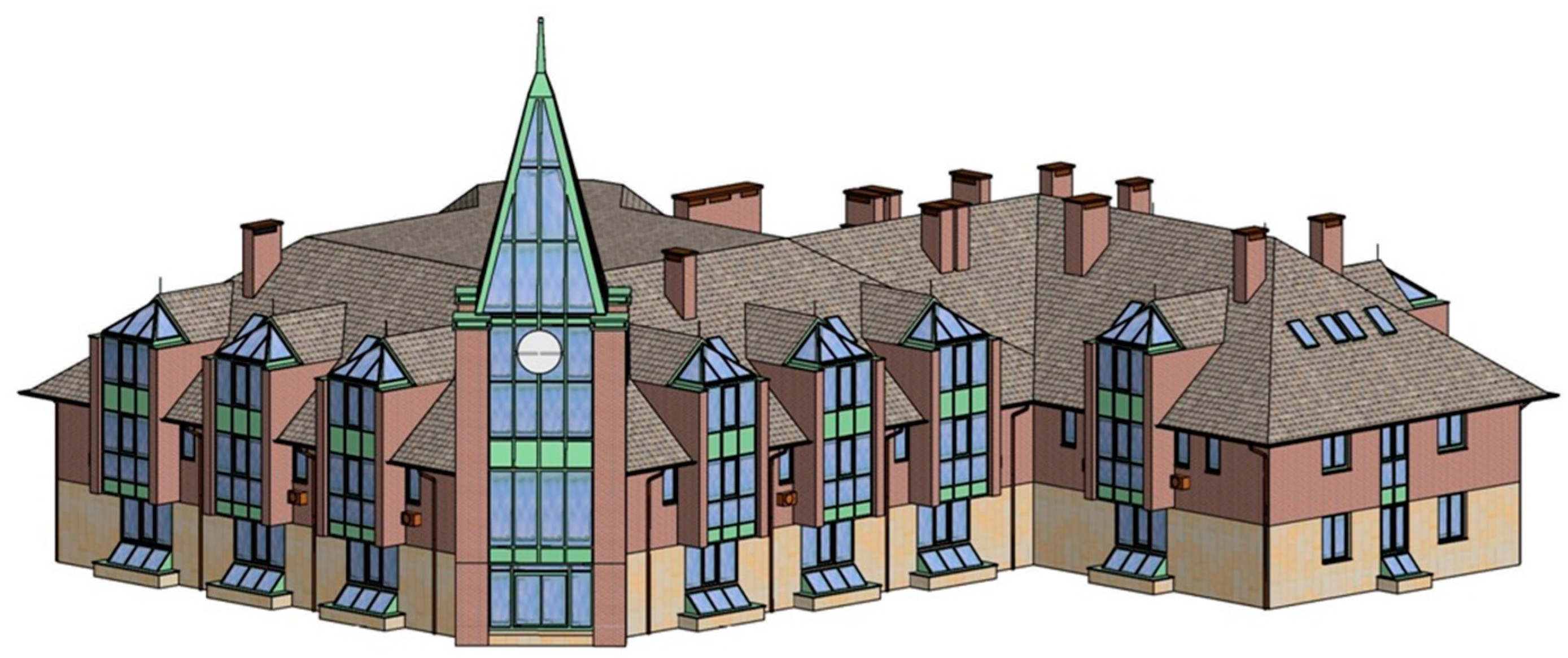
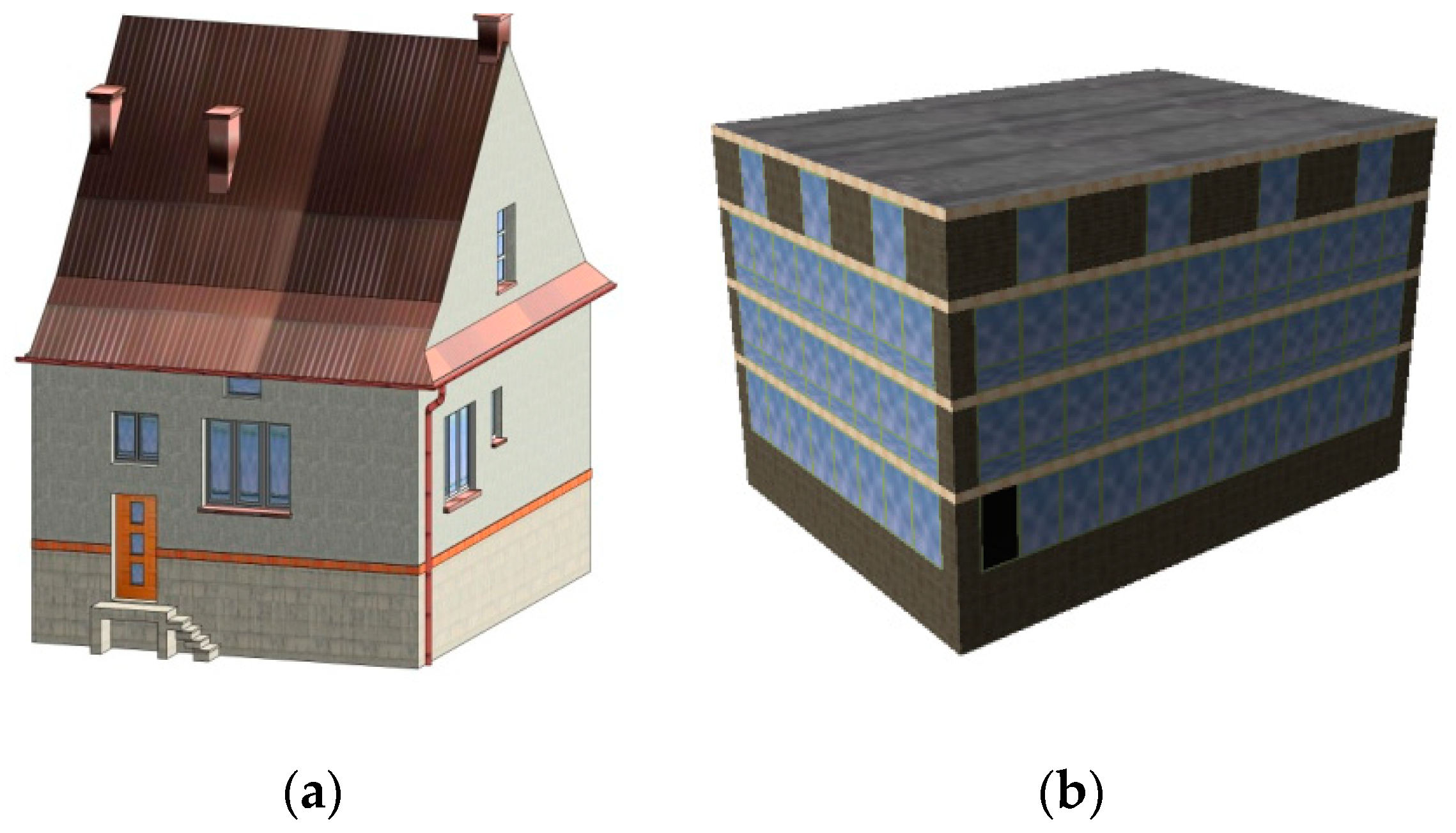
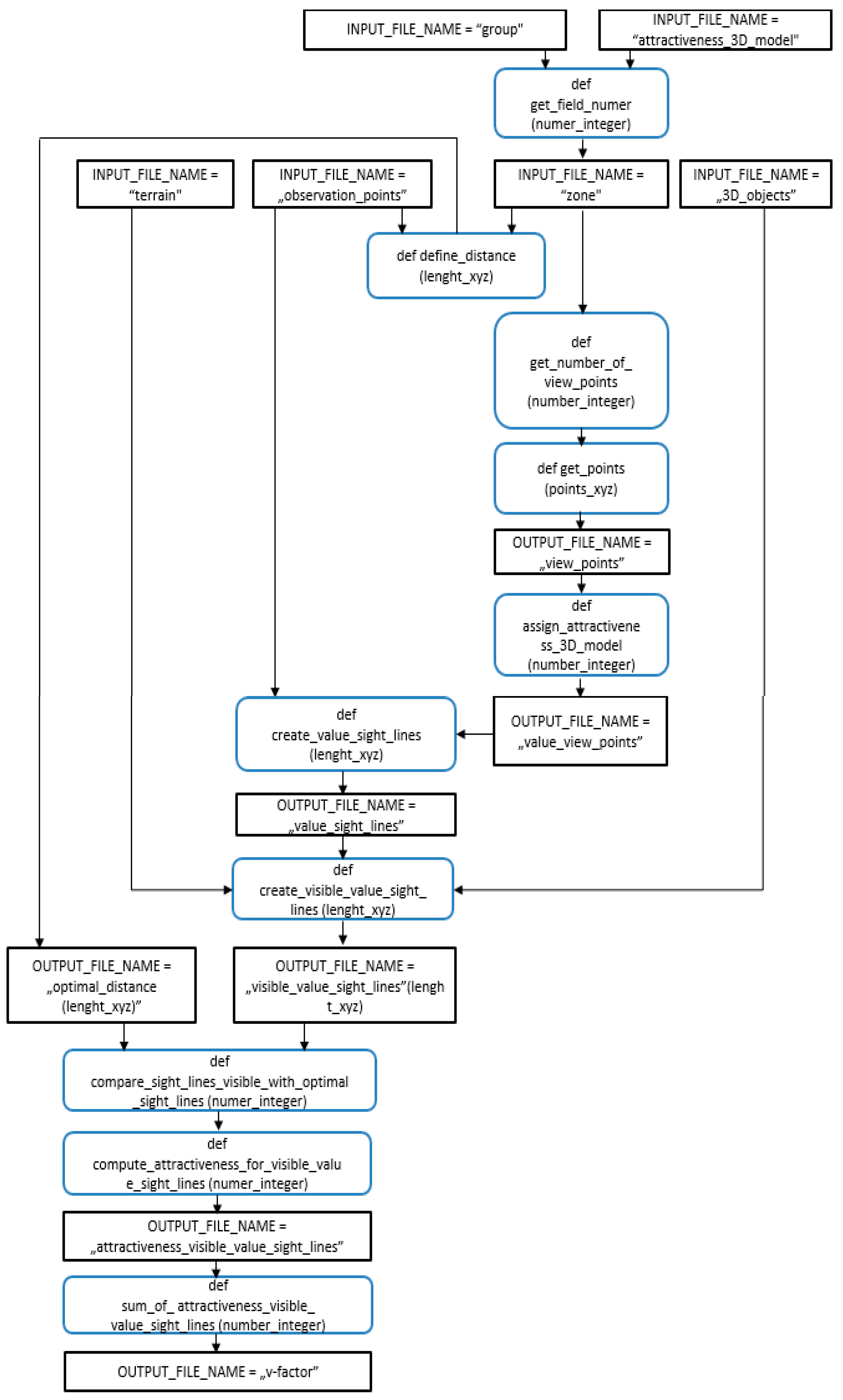
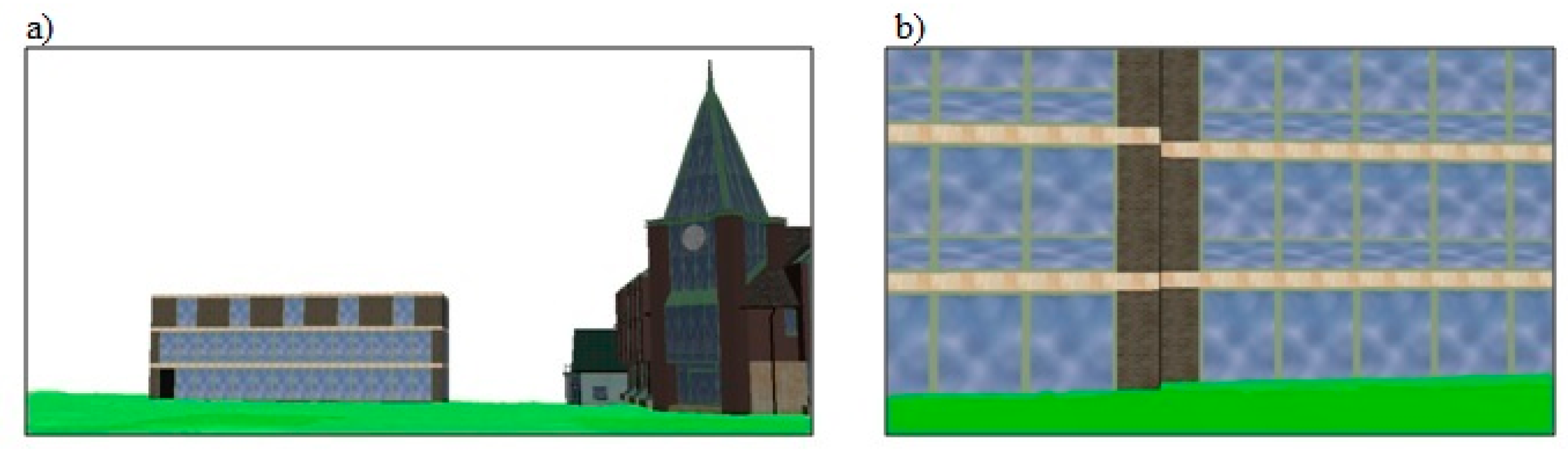
- ‘3D spatial model’—a set of 3D models of the existing buildings in the field and planned 3D objects in the studied area (Figure 3).
- ‘group’—the group can be a single-element group in the case of a 3D object of a spatial model with simple geometry or a multi-element group for complex geometries.
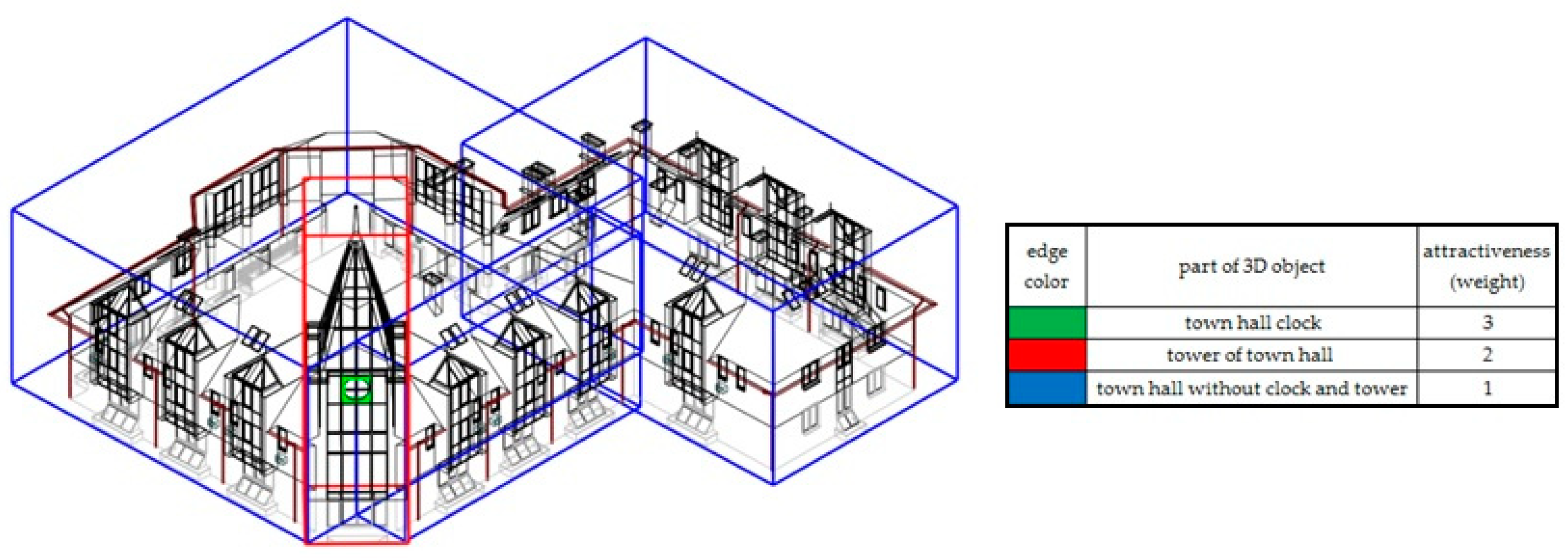
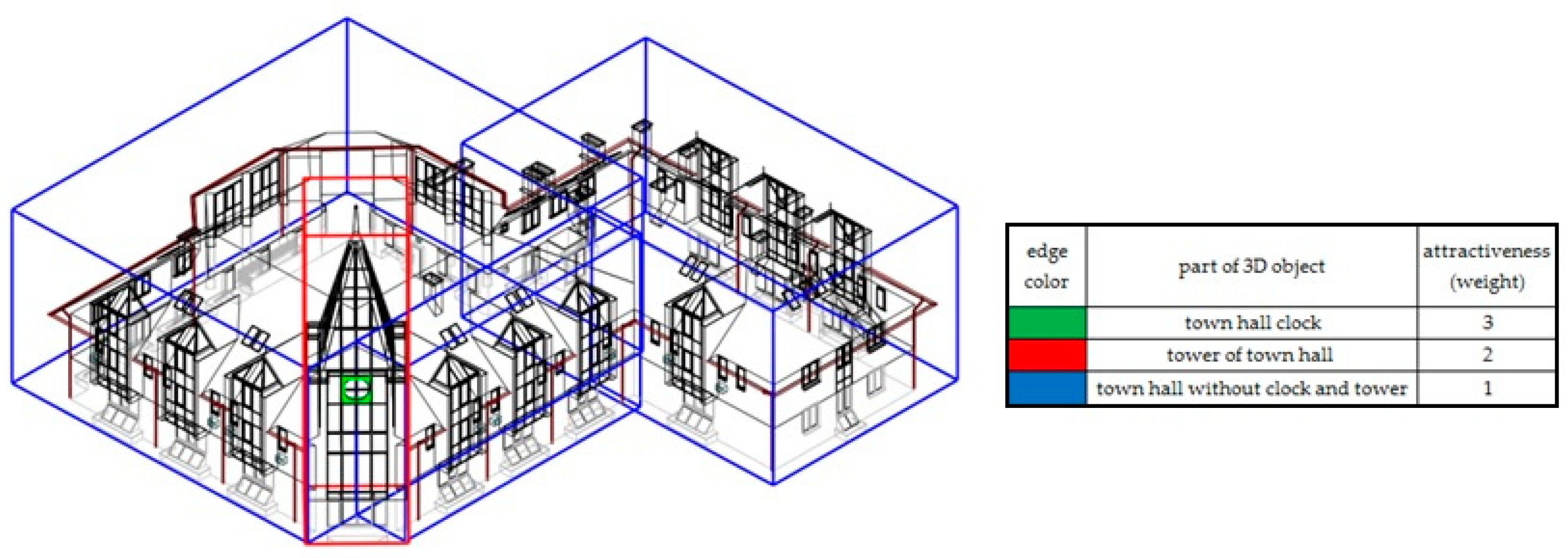
- ‘attractiveness_3D_model’—the attractiveness of an object of a 3D spatial model: a number (weight) from the set of integers, defined for the object of the 3D spatial model. The numerical values are assigned based on the Wejchert’s impression curve method. The assessment of the attractiveness of objects of a 3D spatial model uses an interactive visualisation of the 3D spatial model. The function of rotation, zooming in/out, and moving the 3D visualisation allows the user to explore the 3D spatial model in detail.
- ‘terrain’—a 3D representation of terrain surface.
- ‘observation_points’—the location and the number of observation points are defined in the three-dimensional space as necessary. For the purposes of defining the impact of buildings planned under the local development plan on the existing buildings in the area, it is advisable to set observation points in windows of the existing buildings [30].
- ‘zone’—the smallest possible cuboid that contains a block of a 3D object. Its vertical edges are parallel to the Z axis of the Cartesian system adapted for the given object of the 3D spatial model (Figure 4).While determining the zones of visibility, it is necessary to describe the geometry of the 3D object with the smallest possible number of zones of visibility. In case the geometry of the 3D object is complex, the term ‘group’ is introduced. The zones of visibility belonging to the same group have the same attractiveness. The group can be a single-element group for 3D objects with simple geometry or a multiple-element group for objects with complex geometry. The decision on introducing a group is made by the user after analysing the geometry of the 3D object.
- ‘3D_objects’—a three-dimensional, approximate representation of each element of space that is the subject of the study. 3D objects designed as part of the local development plan.
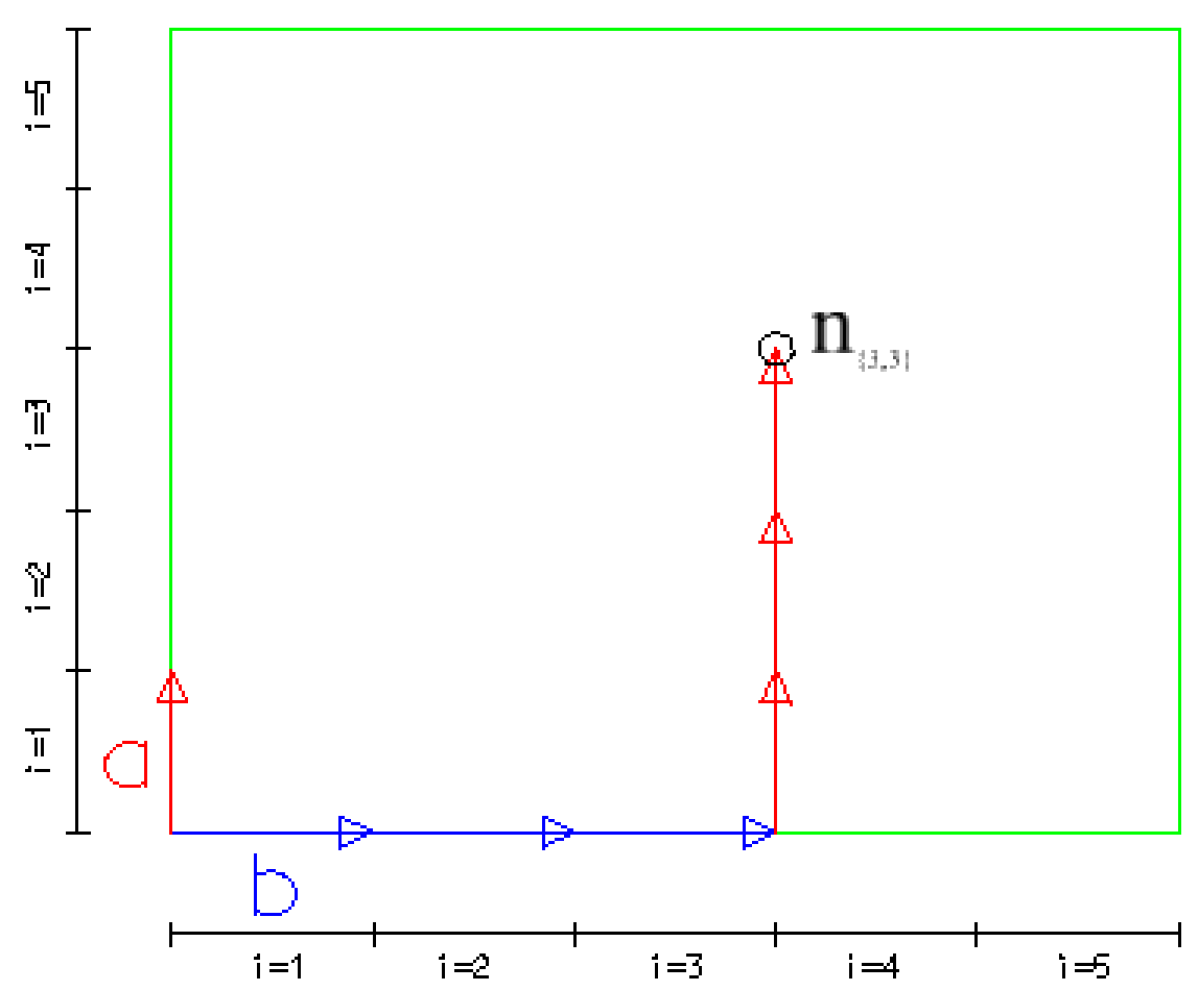
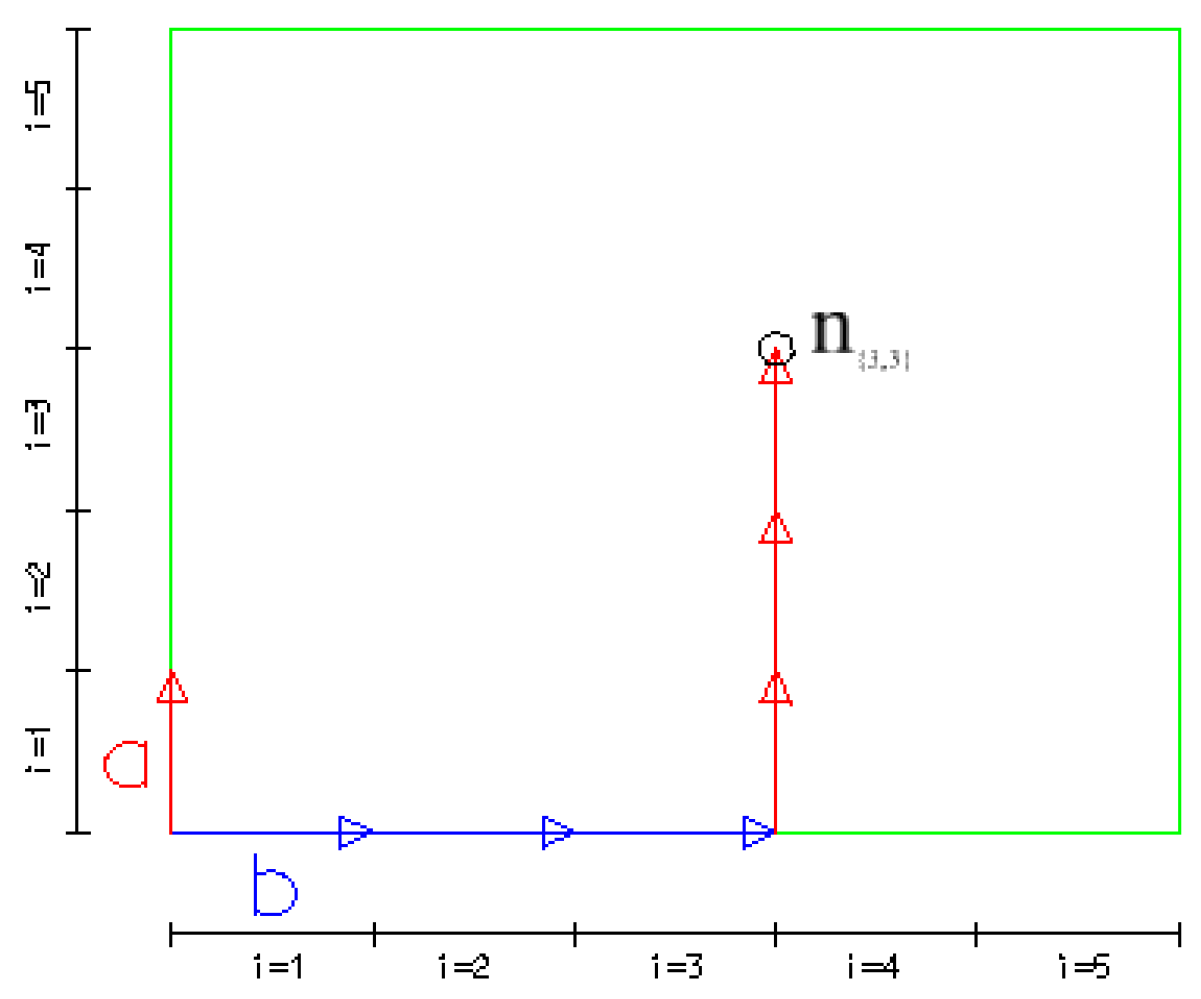
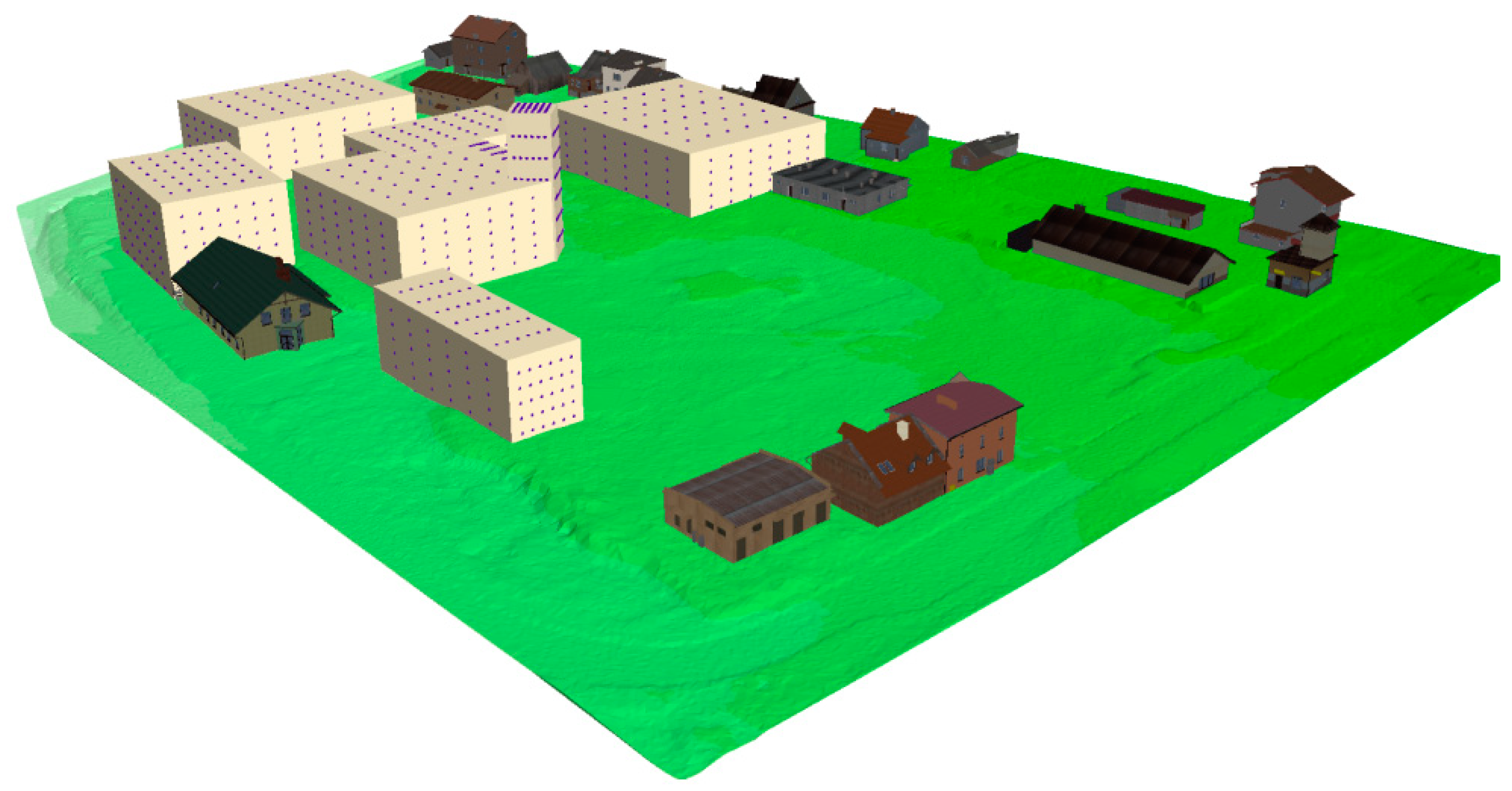
- ‘number_of_view_points’—the number of viewpoints (VPN) for the wall of the zone of visibility is constant for all walls of all zones of visibility present in a spatial model. The number of VPNs must be a square of an integer. For this purpose, two vectors were designed (, ). Each of them is parallel to one of the two adjacent sides of the wall and their lengths are equal 1/n of the length of the respective sides where n = √(VPN) + 1. n{i,j} is a grid point where: i, j ∈ [1, √(VPN)] determined from the formula: n{i, j} = (i ∗ + j ∗ ) (Figure 5).
- ‘view_points’—a set of points where each point is located on the surface of the zone of visibility. Viewpoints are determined in such a way that they are located on the sides of the view wall and they are the vertices of rectangles dividing the wall into congruent rectangles whose vertices divide all sides of the wall into an equal number of segments. For a single-element group, the number of points of view for the wall of the zone of visibility is equal to VPNsingle-el = VPN, while for a multi-element group VPNmulti-el. = VPN/n, where n equals the number of zones of visibility belonging to a given group. Introducing the term ‘VPNmulti-el.’ prevents an uneven contribution of a particular attractiveness of the zone of visibility to the result of the V-factor indicator.
- ‘value_view_point’ = numerical value (weight) is determined for each viewpoint. This is equal to the attractiveness of the zone of visibility to which the point belongs (Figure 6). Every viewpoint must have assigned the attractiveness of the zone of visibility to which it belongs.
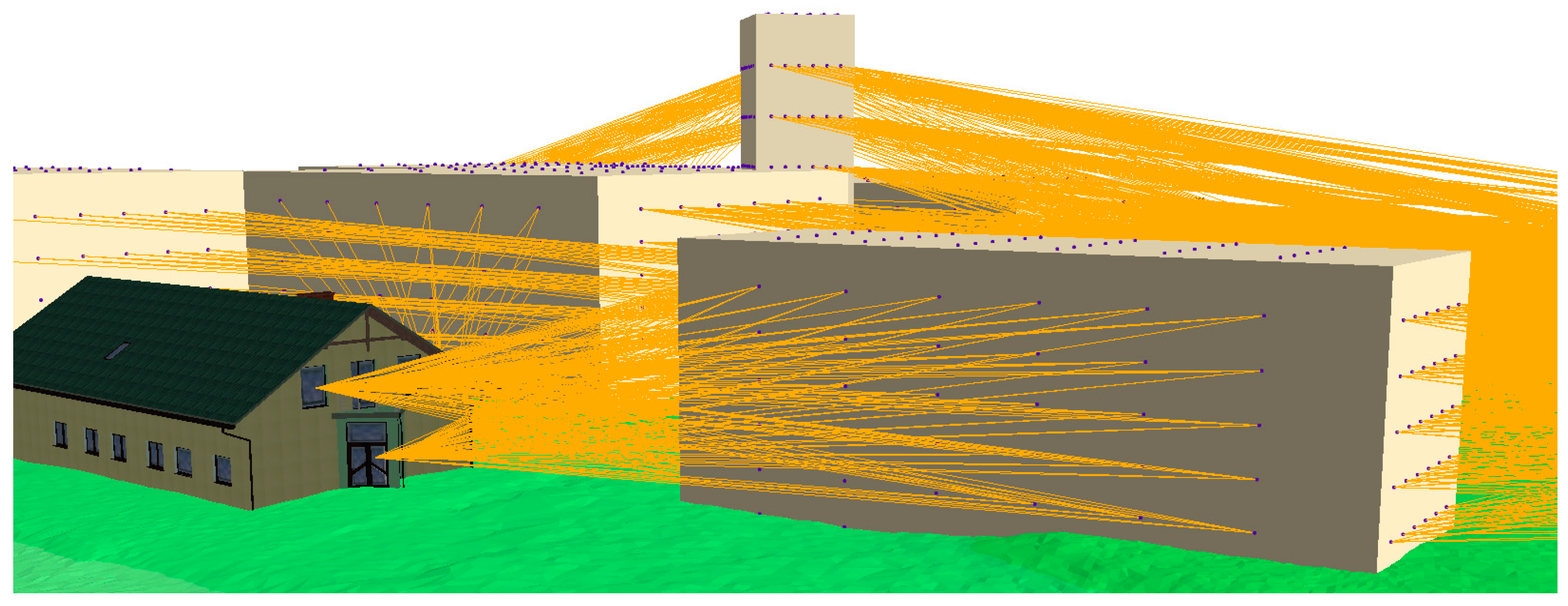
- ‘value_sight_lines’—a segment connecting the observation point with the value viewpoint. Every sightline must have assigned the attractiveness of the value viewpoint corresponding to it.
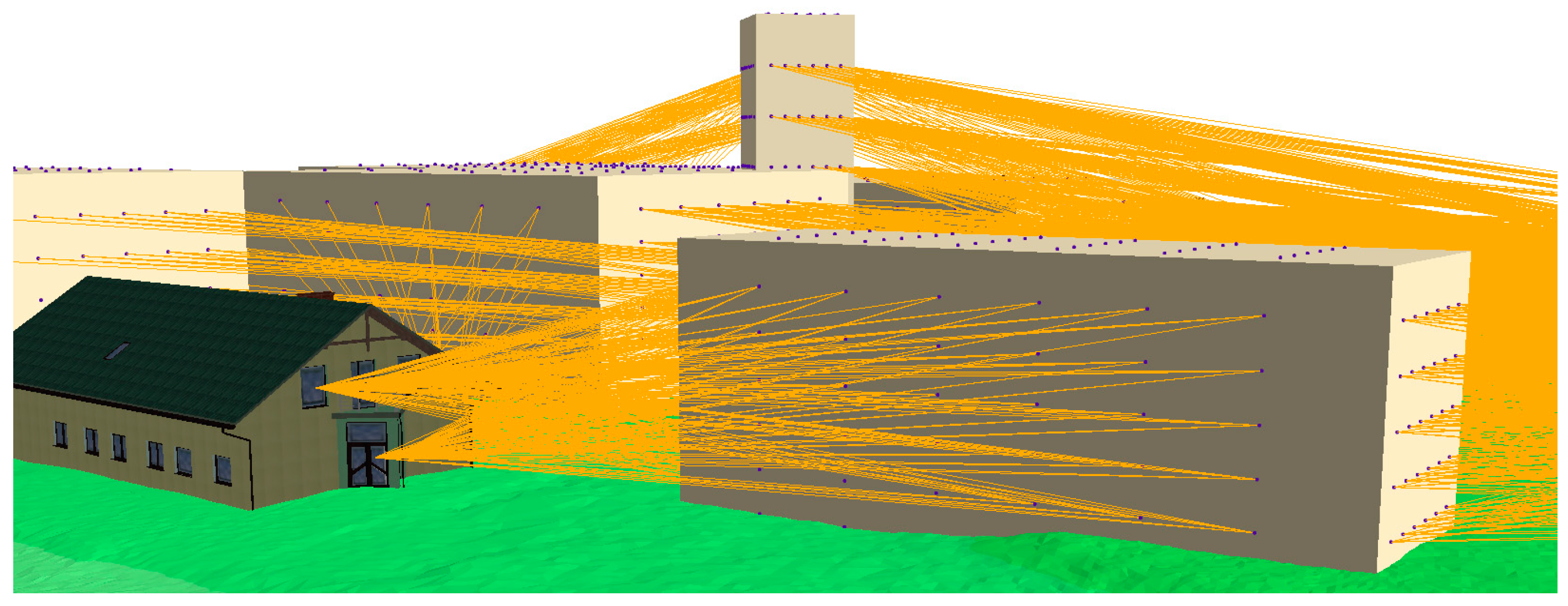
- ‘visible_value_sight_lines’—value sightline not crossing any 3D objects of the 3D spatial model (Figure 7).
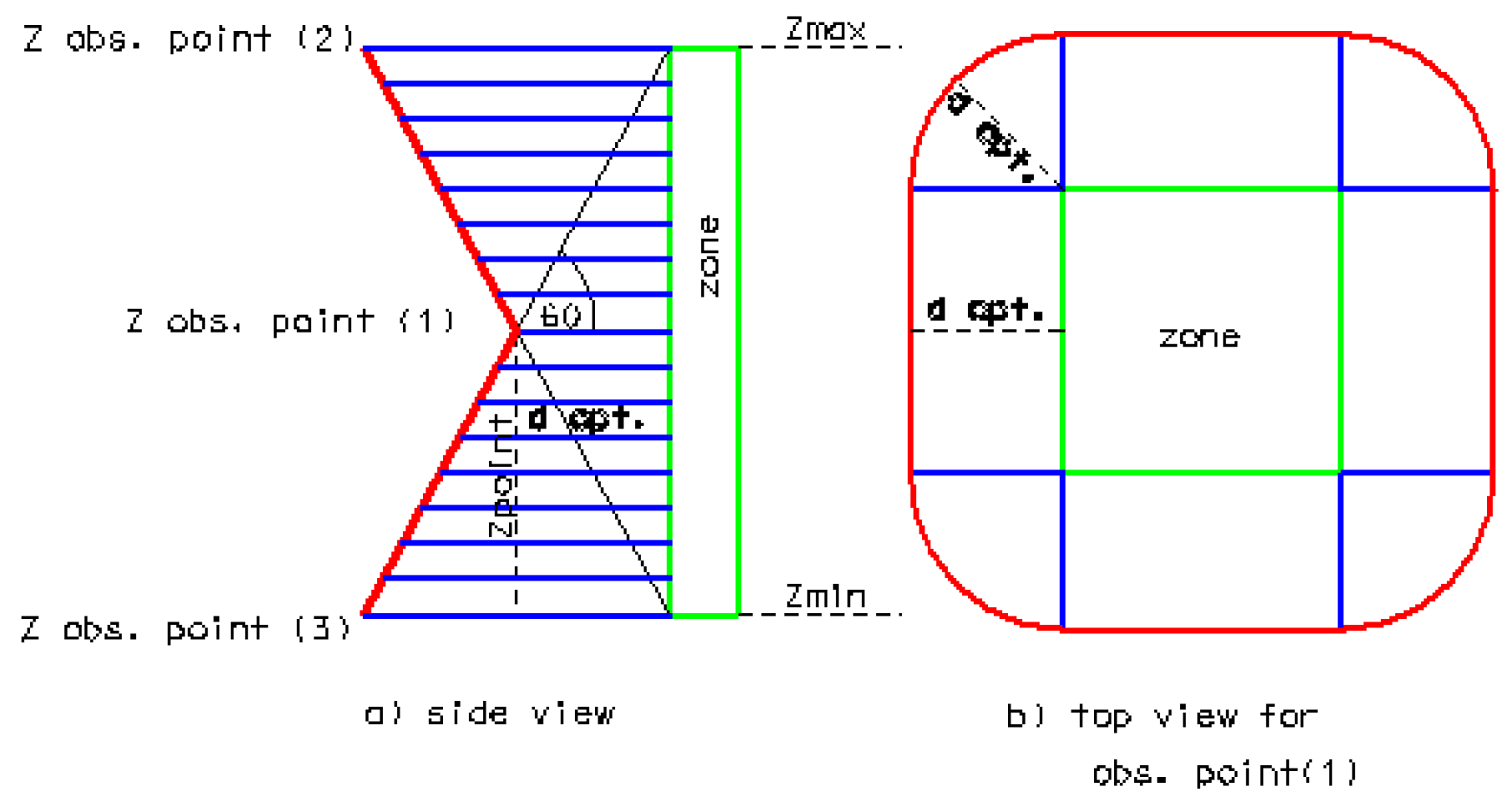
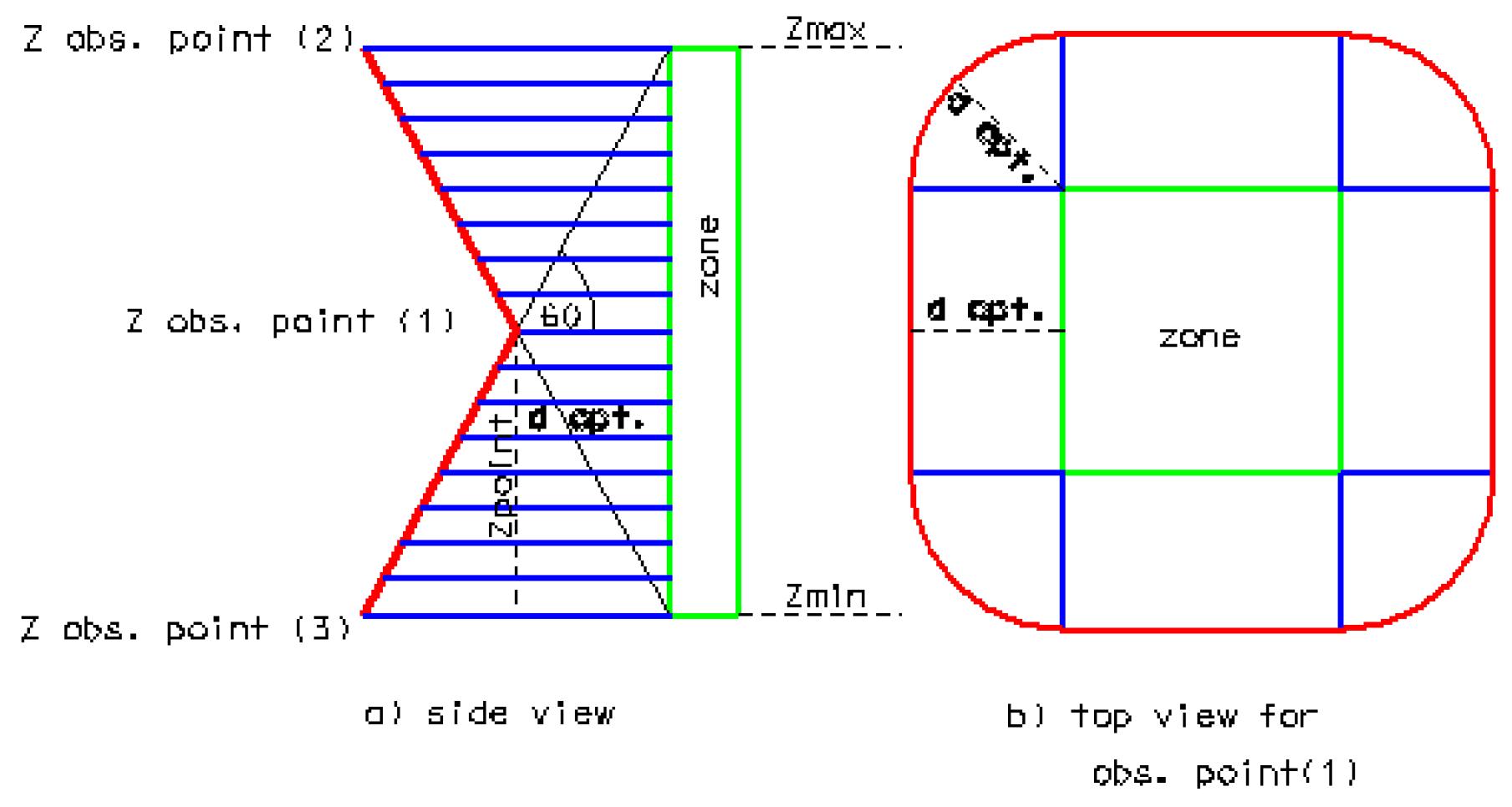
- ‘optimal_distance’—the distance between an observation point and the zone of visibility calculated for each zone of visibility defined for the 3D object of the 3D spatial model. The assumption was made that the optimal distance of observation is that at which the total height of the zone is visible from the observation point, assuming a vertical observer angle of 120 degrees. The total height of the 3D object of the 3D spatial model is calculated as the difference between the Z coordinate of the upper and lower base of the zone of visibility assigned to each 3D object of the 3D spatial model (Figure 8).dopt. = ((Zmax − Zmin) − Zobs) ∗ ctgφ
- ‘attractiveness_visible_value_sight_lines’ – the attractiveness of the sightline is determined for each sightline based on the following formula:
- —the horizontal angle between the sightline and the zone of visibility it falls on,
- —the vertical angle between the sightline and the zone of visibility it falls on,
- —the attractiveness of the zone of visibility containing a view point that belongs to a given sightline,
- d—the length of the sightline,
- —the optimal observation distance.
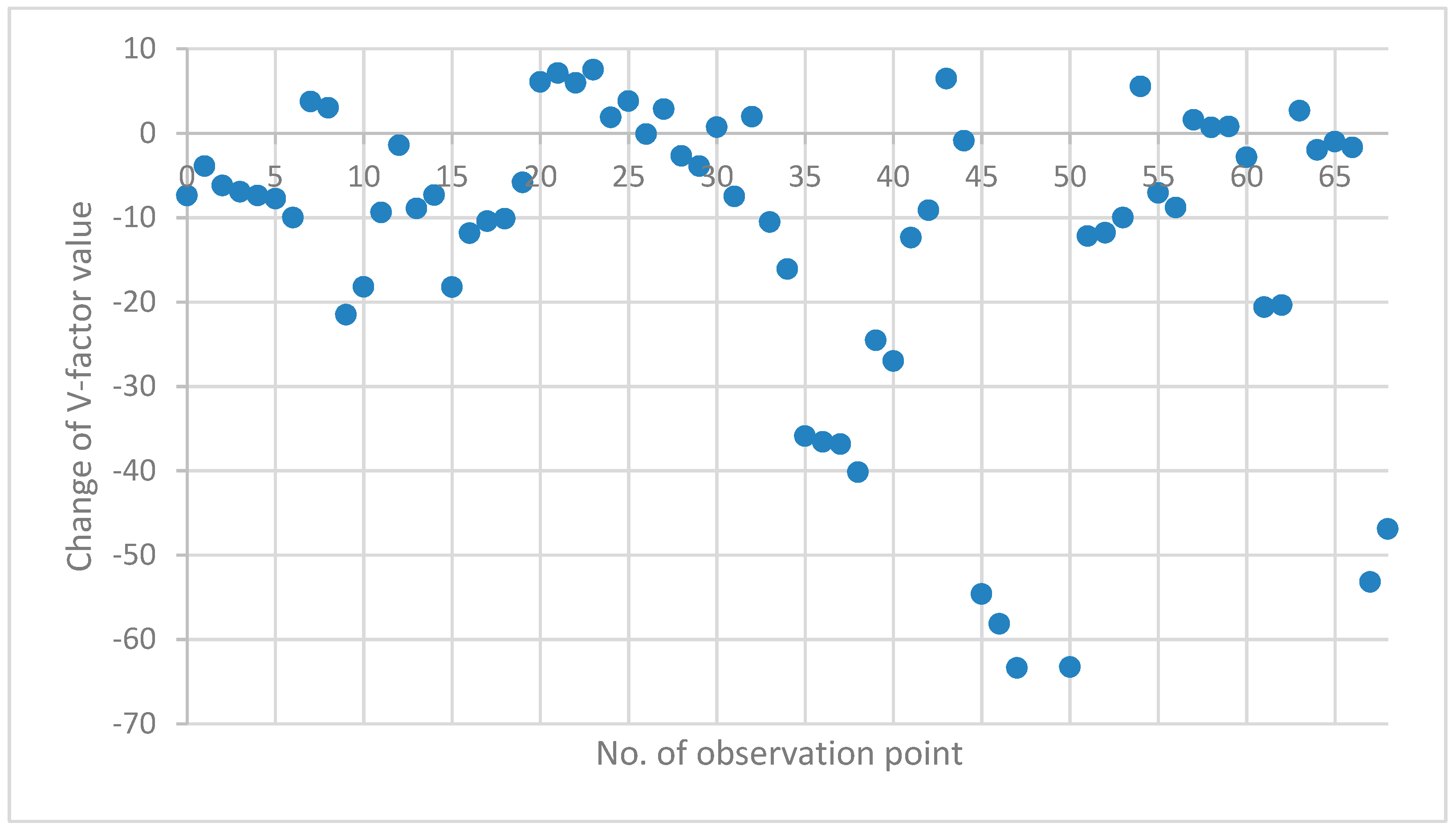
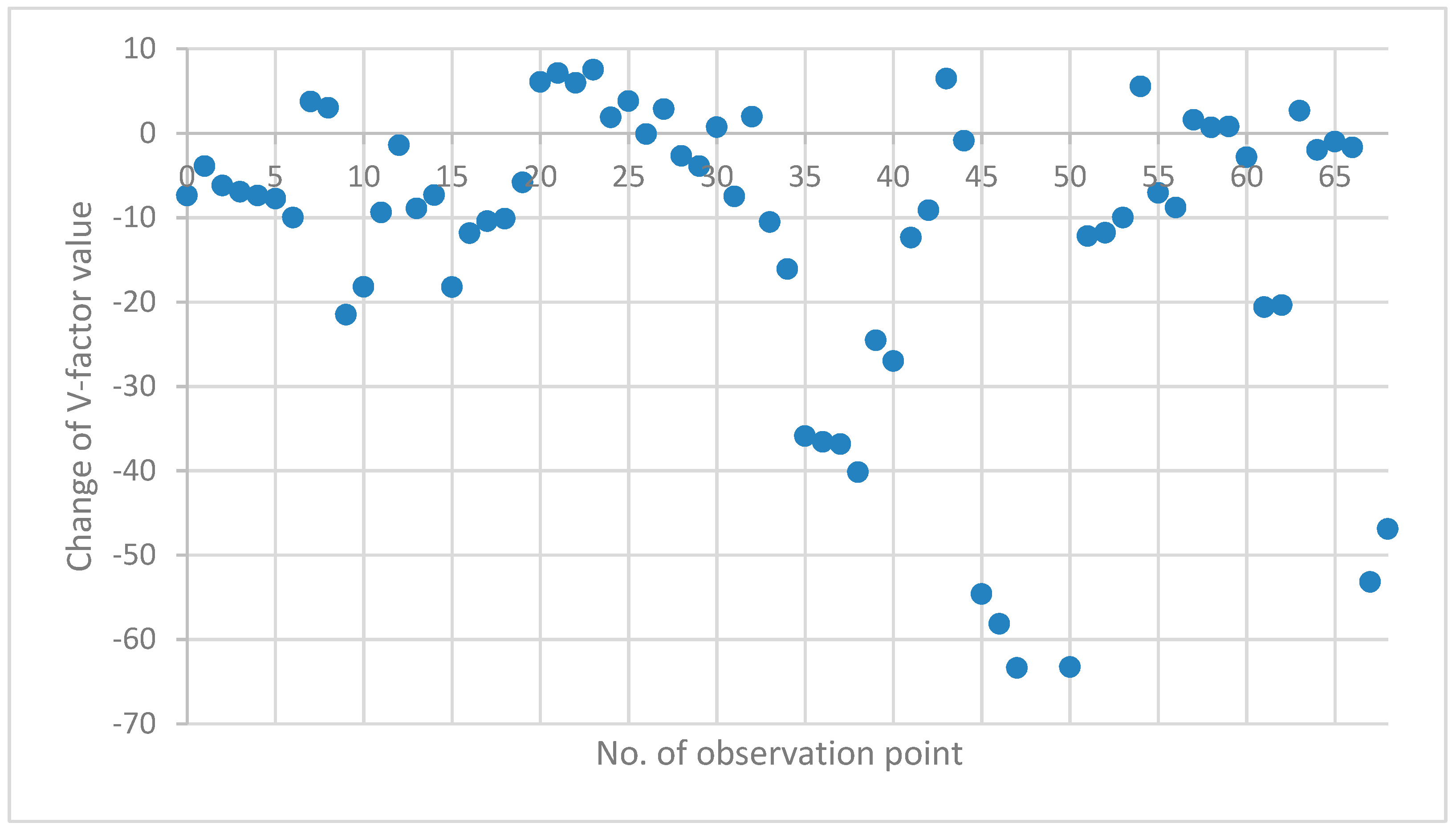
- ‘v-factor’—a sum of the values of attractiveness_visible_value_sight_lines of the sightlines corresponding to a given observation point.
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Adams, N.; Alden, J.; Harris, N. Regional Development and Spatial Planning in an Enlarged European Union; Routledge Taylor & Francis Group: New York, NY, USA, 2016; p. 5. [Google Scholar]
- Fountas, S.; Wulfsohn, D.; Blackmore, B.S.; Jacobsen, H.L.; Pederson, S.M. A model of decision-making and information flows for information-intensive agriculture. Agr. Syst. 2006, 87, 192–210. [Google Scholar] [CrossRef]
- Matsuoka, R.H.; Kaplan, R. People needs in the urban landscape: Analysis of Landscape and Urban Planning contributions. Landsc. Urban Plan. 2008, 84, 7–19. [Google Scholar] [CrossRef]
- Angelidou, M. Smart city policies: A spatial approach. Cities 2014, 41, S3–S11. [Google Scholar] [CrossRef]
- Zubizarreta, I.; Seravalli, A.; Arrizabalaga, S. Smart City Concept: What It Is and What It Should Be. J. Urban Plan. Dev. 2016, 142, 04015005. [Google Scholar] [CrossRef]
- Hernik, J.; Gawroński, K.; Dixon-Gough, R. Social and economic conflicts between cultural landscapes and rural communities in the English and Polish systems. Land Use Policy 2013, 30, 800–813. [Google Scholar] [CrossRef]
- Bishop, I.D.; Wherrett, J.R.; Miller, D.R. Assessment of path choices on a country walk using a virtual environment. Landsc. Urban Plan. 2001, 52, 225–237. [Google Scholar] [CrossRef]
- Pakzad, E.; Salari, N. Measuring sustainability of urban blocks: The case of Dowlatabad, Kermanshah city. Cities 2018, 75, 90–100. [Google Scholar] [CrossRef]
- Sabri, S.; Pettit, C.J.; Kalantari, M.; Rajabifard, A.; White, M.; Lade, O.; Ngo, T. What are Essential requirements in Planning for Future Cities using Open Data Infrastructures and 3D Data Models? In Proceedings of the CUPUM 2015, 14th International Conference on Computers in Urban Planning and Urban Management, Cambridge, MA, USA, 7–10 July 2015; Available online: https://www.opengeospatial.org/standards/citygml (accessed on 10 February 2019).
- Chamberlain, B.C.; Meitner, M.J. A route-based visibility analysis for landscape management. Landsc. Urban Plan. 2013, 111, 13–24. [Google Scholar] [CrossRef]
- Lippold, A. 3D city-scale modelling applied to sustainable design: history, example, and the future. In Proceedings of the policy conference, Stuttgart, Germany, 15–17 September 2010. [Google Scholar]
- Open Geospatial Consortium. Available online: https://www.opengeospatial.org/standards/citygml (accessed on 10 December 2018).
- Gröger, G.; Plümer, L. CityGML–Interoperable semantic 3D city models. ISPRS J. Photogramm. Remote Sens. 2012, 71, 12–33. [Google Scholar] [CrossRef]
- Catita, C.; Redweik, P.; Pereira, J.; Brito, M.C. Extending solar potential analysis in buildings to vertical facades. Comput. Geosci. 2014, 66, 1–12. [Google Scholar] [CrossRef]
- Chun, B.; Guldmann, J.M. Spatial statistical analysis and simulation of the urban heat island in high-density central cities. Landsc. Urban Plan. 2014, 125, 76–88. [Google Scholar] [CrossRef]
- Martínez, J.; Soria-Medina, A.; Arias, P.; Buffara-Antunes, F. Automatic processing of Terrestrial Laser Scanning data of building facades. Autom. Constr. 2012, 22, 298–305. [Google Scholar] [CrossRef]
- Pu, S.; Vosselman, G. Automatic extraction of building features from terrestrial laser scanning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 25–27. [Google Scholar]
- Pu, S. Generating building outlines from terrestrial laser scanning. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—Beijing, Part B5, XXXVII, Beijing, China, 3–11 July 2008. [Google Scholar]
- Pluta, M.; Głowacka, A. Dokładność modelowania 3D na podstawie chmury punktów z naziemnego skaningu laserowego. Episteme Czasopismo Kulturalno Naukowe 2015, 26, 125–132. [Google Scholar]
- Jim, C.; Chen, W.Y. Impacts of urban environmental elements on residential housing prices in Guangzhou (China). Landsc. Urban Plan. 2006, 78, 422–434. [Google Scholar] [CrossRef]
- Suleiman, W.; Joliveau, T.; Favier, E. 3D Urban Visibility Analysis with vector Gis Data. In Proceedings of the 19th annual GIS Research UK (GISRUK), University of Portsmouth, Portsmouth, UK, 27–29 April 2011. [Google Scholar]
- Miller, D. A method for estimating changes in the visibility of land cover. Landsc. Urban Plan. 2001, 54, 93–106. [Google Scholar] [CrossRef]
- Turner, A.; Doxa, M.; Sullivan, D.; Penn, A. From isovists to visibility graphs: a methodology for the analysis of architectural space. Environ. Plann. B Plann. Des. 2001, 28, 103–121. [Google Scholar] [CrossRef]
- Albrecht, F.; Moser, J.; Hijazi, I. Assessing facade visibility in 3d city models for city marketing. In Proceedings of the ISPRS 8th 3D GeoInfo Conference & WG II/2 Workshop, XL-2/W2, Istanbul, Turkey, 27–29 November 2013. [Google Scholar]
- Davidson, D.; Watson, A.; Selman, P. An evaluation of GIS as an aid to the planning of proposed developments in rural areas. Geogr. Inf. Handl. Res. Appl. 1993, 1, 251–259. [Google Scholar]
- Iverson, W. And that’s about the size of it: Visual magnitude as a measurement of the physical landscape. Landsc. J. 1985, 4, 14. [Google Scholar] [CrossRef]
- Benedikt, M.L. To take hold of space: isovists and isovist fields. Environ. Plann. 1979, 6, 47–65. [Google Scholar] [CrossRef]
- Bartie, P.; Reitsma, F.; Kingham, S.; Mills, S. Advancing visibility modelling algorithms for urban environments. Comput. Environ. Urban Syst. 2010, 34, 518–531. [Google Scholar] [CrossRef]
- Chmielewski, S.; Tompalski, P. Estimating outdoor advertising media visibility with voxel-based approach. Appl. Geogr. 2017, 87, 1–13. [Google Scholar] [CrossRef]
- Fisher-Gewirtzman, D.; Shashkov, A.; Doytsher, Y. Voxel based volumetric visibility analysis of urban environments. Surv. Rev. 2013, 45, 451–461. [Google Scholar] [CrossRef]
- Feng, W.; Gang, W.; Deji, P.; Yuan, L.; Liuzhong, L.; Hongbo, W. A parallel algorithm for viewshed analysis in three-dimensional Digital Earth. Comput. Geosci. 2015, 75, 57–65. [Google Scholar] [CrossRef]
- Suleiman, W.; Joliveau, T.; Favier, E. Advances in Spatial Data Handling; Springer: Berlin/Heidelberg, Germany, 2013; pp. 157–173. [Google Scholar]
- Bartie, P.; Mackaness, W. Mapping the visual magnitude of popular tourist sites in Edinburgh city. J. Maps 2016, 12, 203–210. [Google Scholar] [CrossRef]
- Sawada, M.; Cossette, D.; Wellar, B.; Kurt, T. Analysis of the urban/rural broadband divide in Canada: Using GIS in planning terrestrial wireless deployment. Gov Inf. Q. 2006, 23, 454–479. [Google Scholar] [CrossRef]
- Guneya, C.; Girginkaya, S.A.; Cagdas, G.; Yavuz, S. Tailoring a geomodel for analyzing an urban skyline. Landsc. Urban Plan. 2012, 105, 160–173. [Google Scholar] [CrossRef]
- Karimimoshaver, M.; Winkemann, P. A framework for assessing tall buildings’ impact on the city skyline: Aesthetic, visibility, and meaning dimensions. Environ. Impact Asses. Rev. 2018, 73, 164–176. [Google Scholar] [CrossRef]
- Rafieian, M.; Rad, H.R.; Sharifi, A. The Necessity of using Sky View Factor in Urban Planning: A Case Study of Narmak Neighborhood, Tehran. In Proceedings of the 2014 International Conference and Utility Exhibition on Green Energy for Sustainable Development (ICUE 2014), Pattaya City, Thailand, 19–21 March 2014. [Google Scholar]
- Yang, F.; Qian, F.; Lau, S. Urban form and density as indicators for summertime outdoor ventilation potential: A case study on high-rise housing in Shanghai. Build. Environ. 2013, 70, 122–137. [Google Scholar] [CrossRef]
- Oh, K. Visual threshold carrying capacity (VTCC) in urban landscape management: A case study of Seoul, Korea. Landsc. Urban Plan. 1998, 39, 283–294. [Google Scholar] [CrossRef]
- Kupidura, A.; Bielska, A.; Rogoziński, R. Analiza i ocena krajobrazu wizualnego wsi na potrzeby opracowania planów rozwoju obszarów wiejskich. Studia Komitetu Przestrzennego Zagospodarowania Kraju PAN 2012, 1, 336–342. [Google Scholar]
- Lai, S.-K. Why plans matter for cities. Cities 2018, 73, 91–95. [Google Scholar]
- Sustainable Development Goals Knowledge Platform. Available online: https://sustainabledevelopment.un.org/post2015/transformingourworld (accessed on 10 February 2019).
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pluta, M.; Mitka, B. V-Factor Indicator in the Assessment of the Change in the Attractiveness of View as a Result of the Implementation of a Specific Planning Scenario. ISPRS Int. J. Geo-Inf. 2019, 8, 78. https://doi.org/10.3390/ijgi8020078
Pluta M, Mitka B. V-Factor Indicator in the Assessment of the Change in the Attractiveness of View as a Result of the Implementation of a Specific Planning Scenario. ISPRS International Journal of Geo-Information. 2019; 8(2):78. https://doi.org/10.3390/ijgi8020078
Chicago/Turabian StylePluta, Magda, and Bartosz Mitka. 2019. "V-Factor Indicator in the Assessment of the Change in the Attractiveness of View as a Result of the Implementation of a Specific Planning Scenario" ISPRS International Journal of Geo-Information 8, no. 2: 78. https://doi.org/10.3390/ijgi8020078
APA StylePluta, M., & Mitka, B. (2019). V-Factor Indicator in the Assessment of the Change in the Attractiveness of View as a Result of the Implementation of a Specific Planning Scenario. ISPRS International Journal of Geo-Information, 8(2), 78. https://doi.org/10.3390/ijgi8020078