Parallel Cellular Automata Markov Model for Land Use Change Prediction over MapReduce Framework




Abstract
1. Introduction
2. Materials and Background Technologies
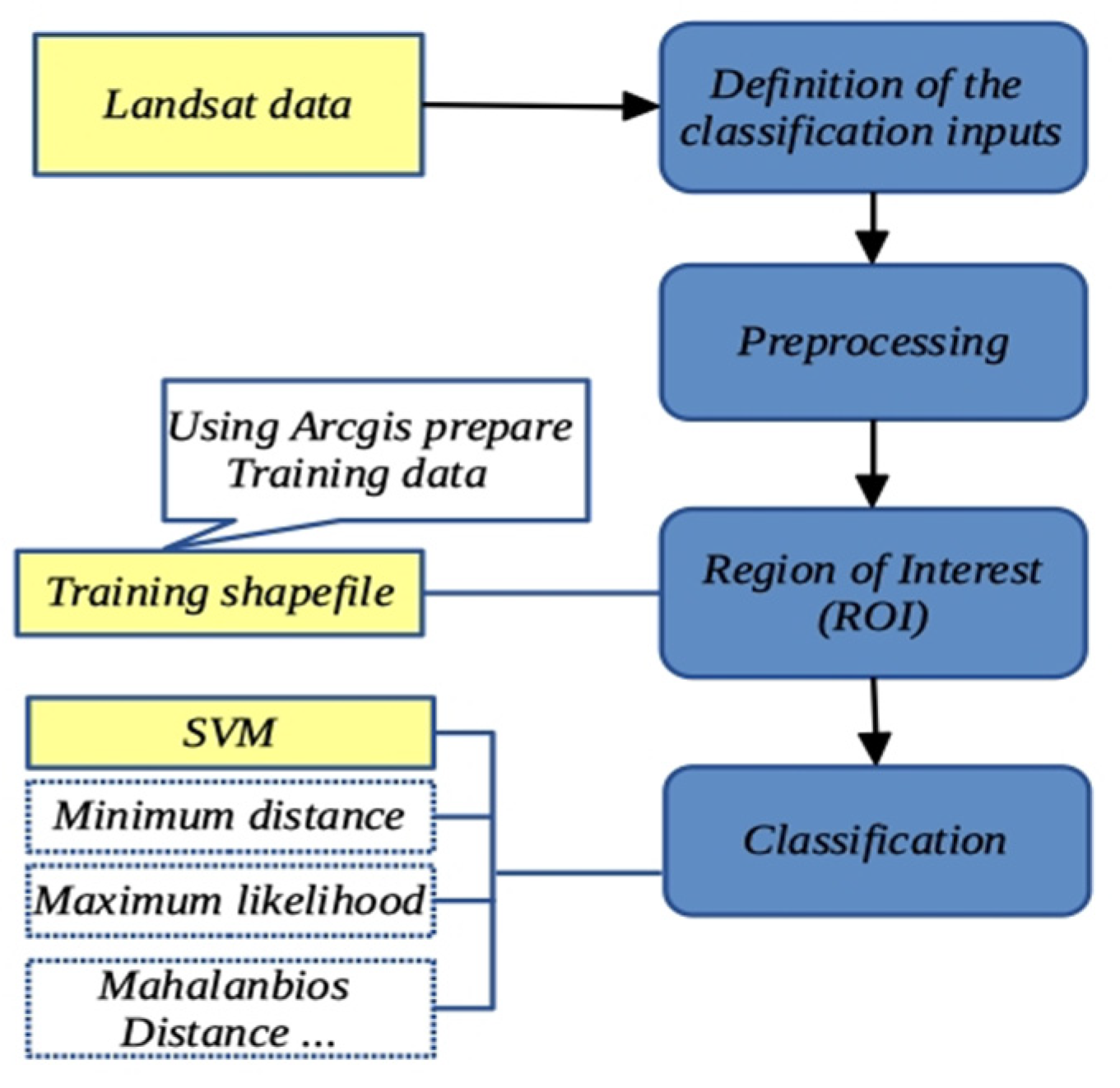
2.1. Study Area and Data
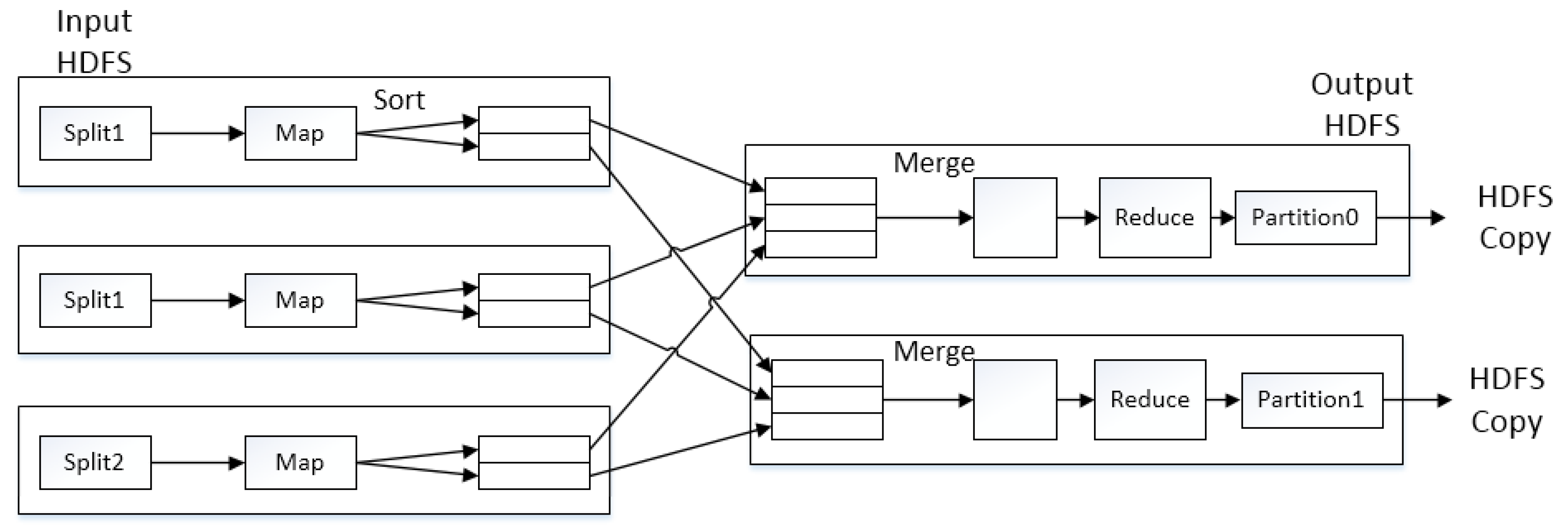
2.2. MapReduce
2.3. CA Markov Model
3. Methods
3.1. Parallel CA-Markov Model Overview
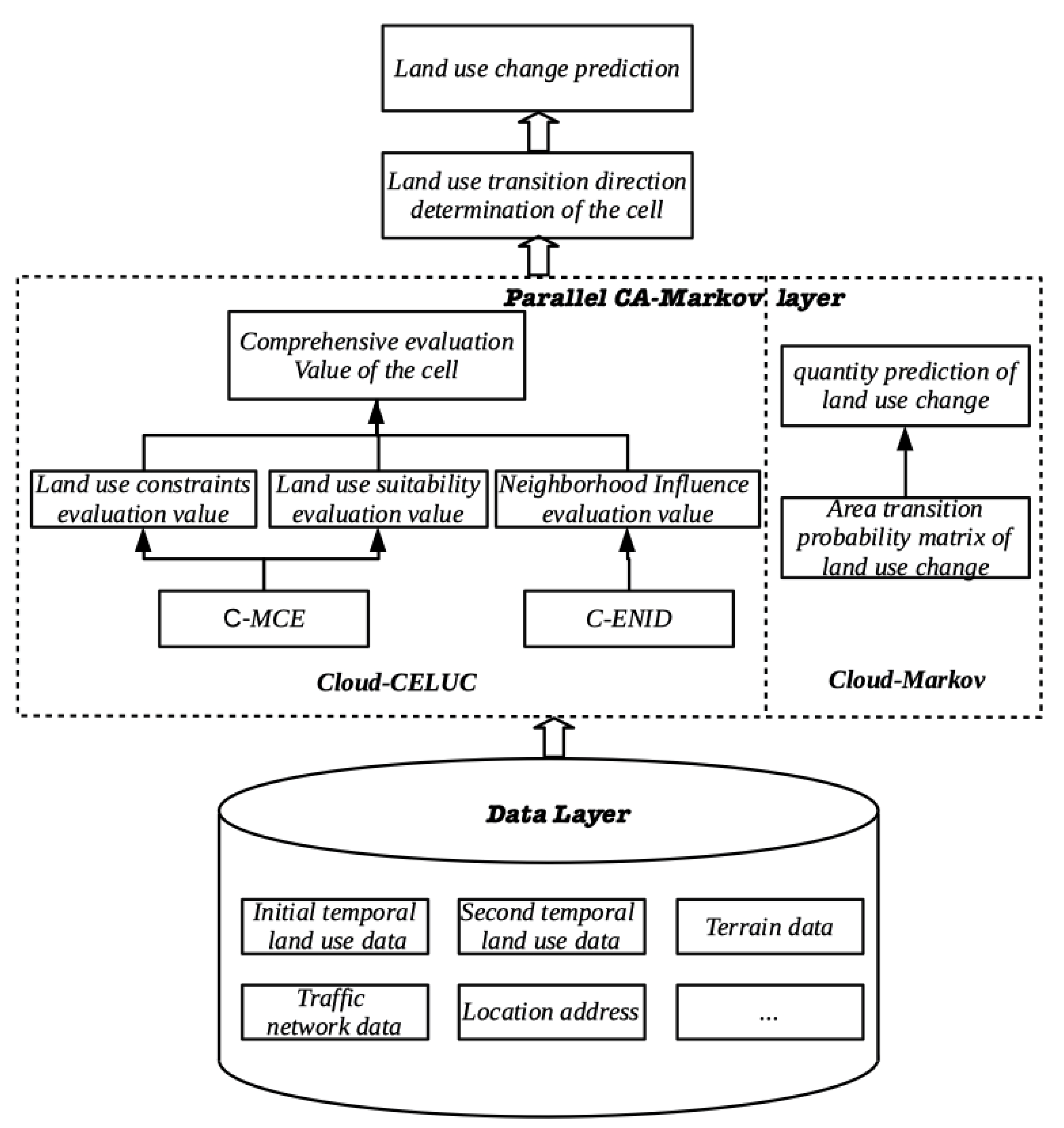
3.1.1. Parallel CA-Markov Structure
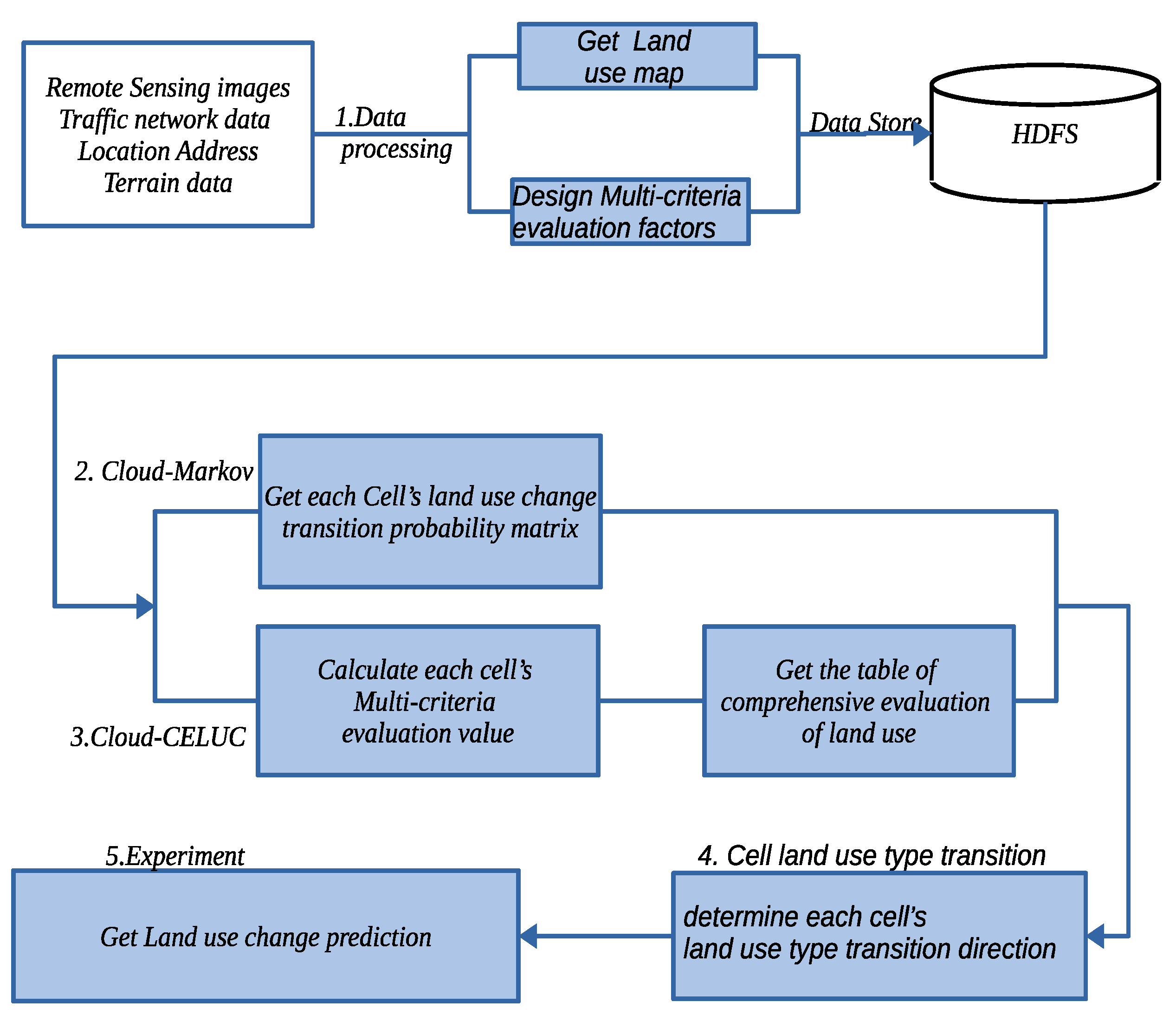
3.1.2. Parallel CA-Markov Workflow
- (1)
- Data-processing: Preprocessing and interpreting remote-sensing images to land-use maps, designing multicriteria-evaluation factors, and storing images, land-use data, and multicriteria-evaluation factors into the Hadoop HDFS.
- (2)
- Parallel Markov: Using the overlay method, analyzing two-phase images and land-use data to obtain each cell’s land-use-type transition probability, and calculating the total number of cells in each land-use-type transition direction, and counting the area transition-probability matrix of each land-use type.
- (3)
- Parallel CA: In Cloud-CELUC, C-ENID was used to calculate the cell’s neighborhood influence value. C-MCE was designed to calculate multicriteria-evaluation values, including constraint-evaluation and suitability-evaluation values. These values were then used to calculate the statistical table of comprehensive evaluation of land use.
- (4)
- Transition-direction determination stage: Loop reading each cell’s transition probability from the statistical table of comprehensive-evaluation values in the parallel CA stage and combining the area transfer-probability matrix of each land-use type in the parallel Markov stage to decide a cell’s land-use-type transition direction.
- (5)
- Land-use-change prediction: In our experiment, we used data from 2006 to predict 2013 land-use changes and then evaluate the precision of the parallel CA-Markov model with a Kappa coefficient. Land-use change prediction for 2020 was then obtained.
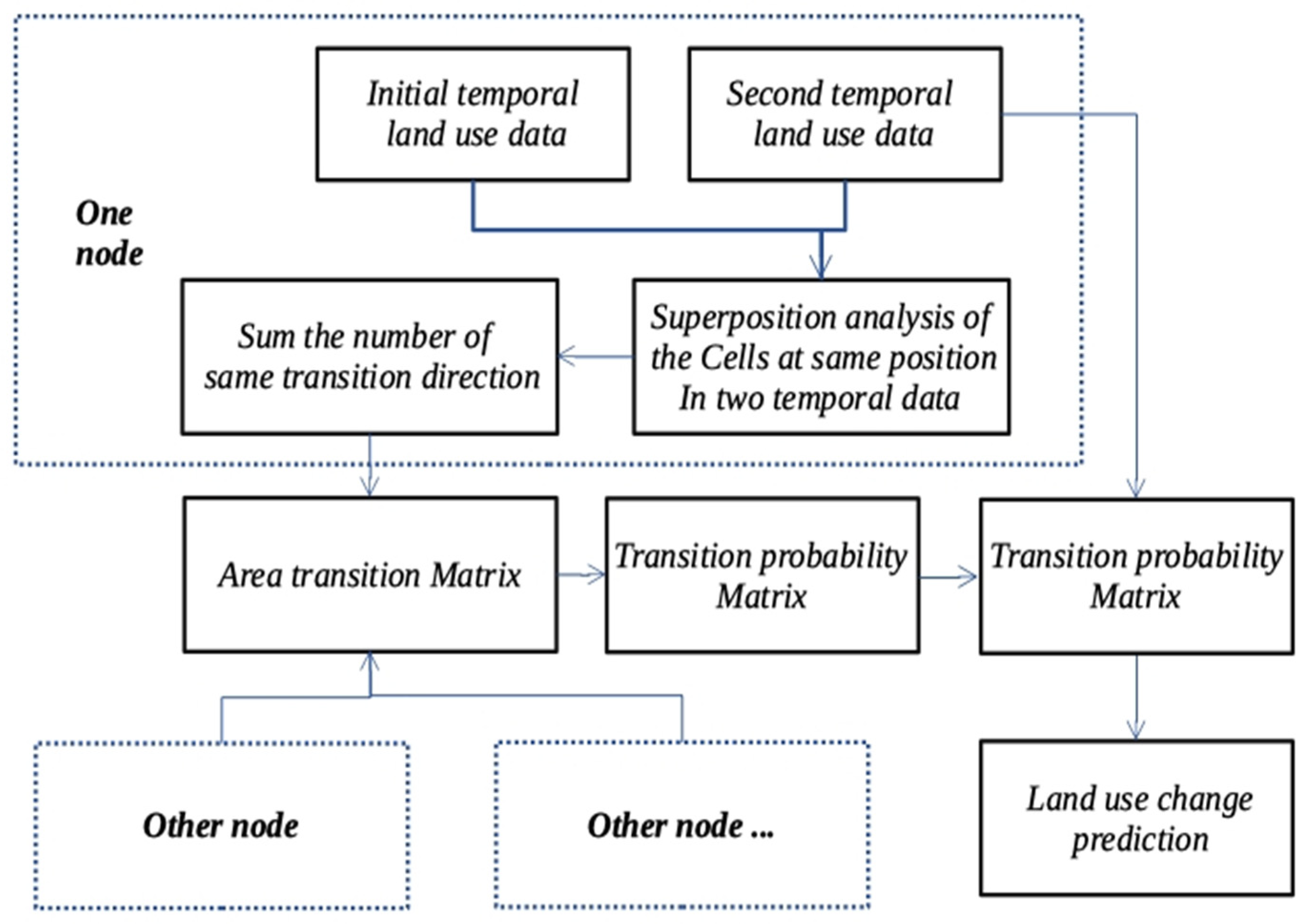
3.2. Markov Model Parallel Processing (Cloud-Markov)
- (1)
- Map stage:
- ①
- Input <Key,Value>
- ②
- Raster cell’s land-use type conversion analysis
- ③
- Output <Key,Value>
- (2)
- Combiner stage:
- ①
- Enter <Key,Value>
- ②
- Calculate the number of each land-use-type conversion direction in each node
- ③
- Output <Key,Value>
- (3)
- Reduce stage:
- ①
- Enter <Key,Value>
- ②
- Calculate transition probability
- ③
- Output <Key,Value>
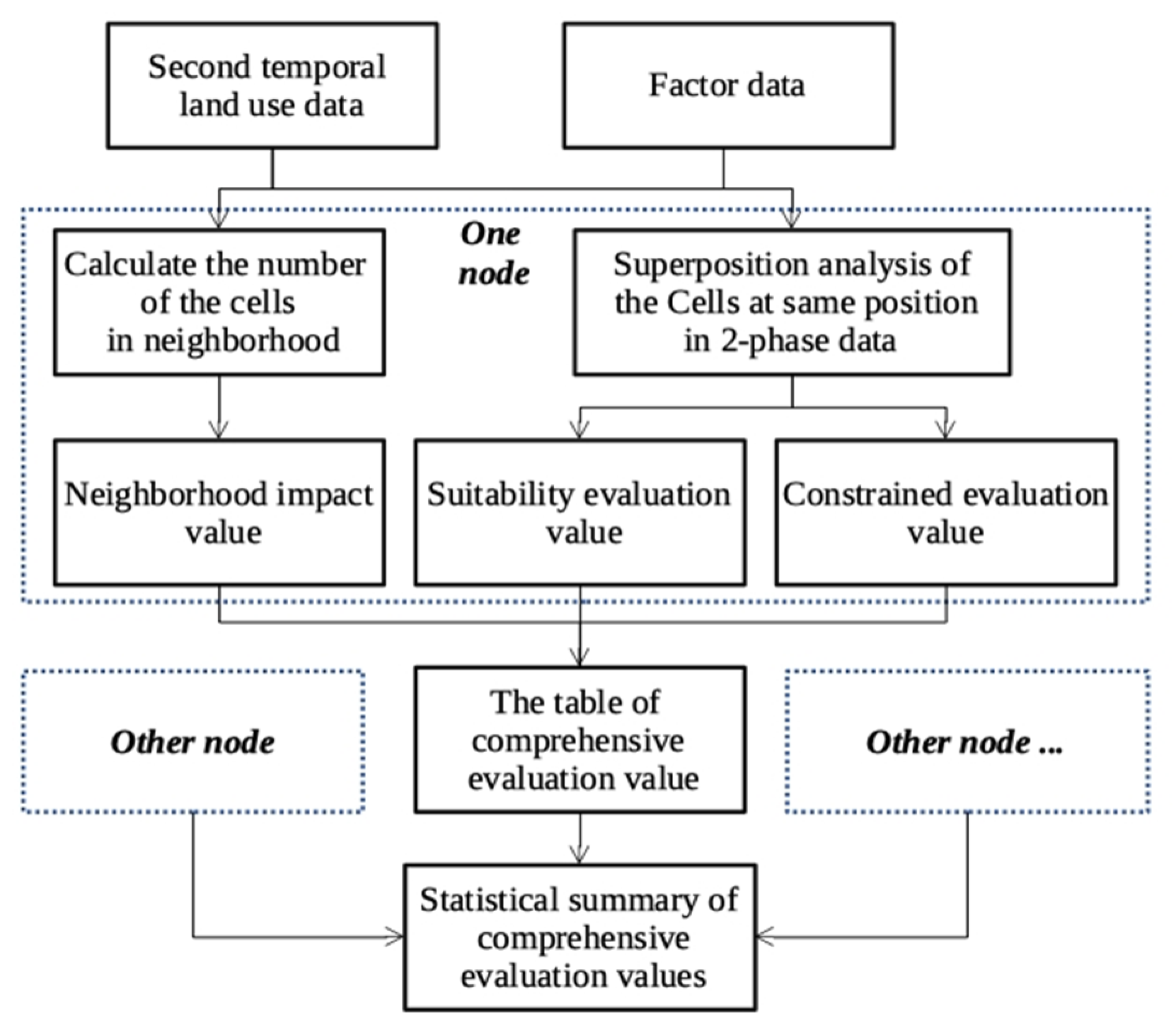
3.3. Cloud-CELUC
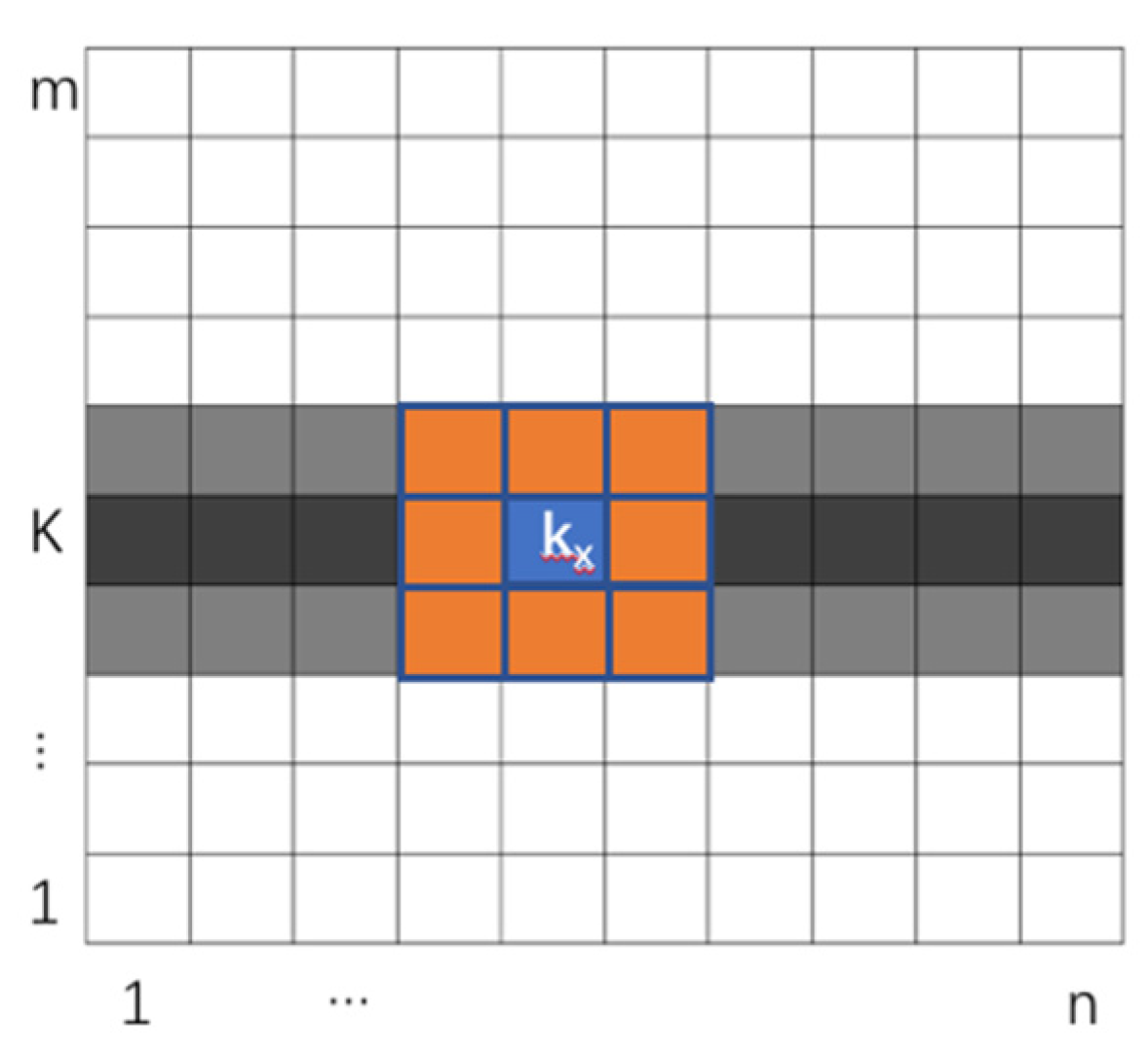
3.3.1. Cell Neighborhood Processing
3.3.2. Multicriteria Evaluation Factors
3.3.3. Parallel Cloud-CELUC Algorithm
- ①
- Enter <Key,Value>
- ②
- Calculate neighborhood-influence evaluation value (NID)
- ③
- Calculate Suitability-Evaluation Value (SEV)
- ④
- Calculate constraint-evaluation value (CEV)
- ⑤
- Calculate comprehensive-evaluation value (CELUC)
- ⑥
- Output <Key,Value>
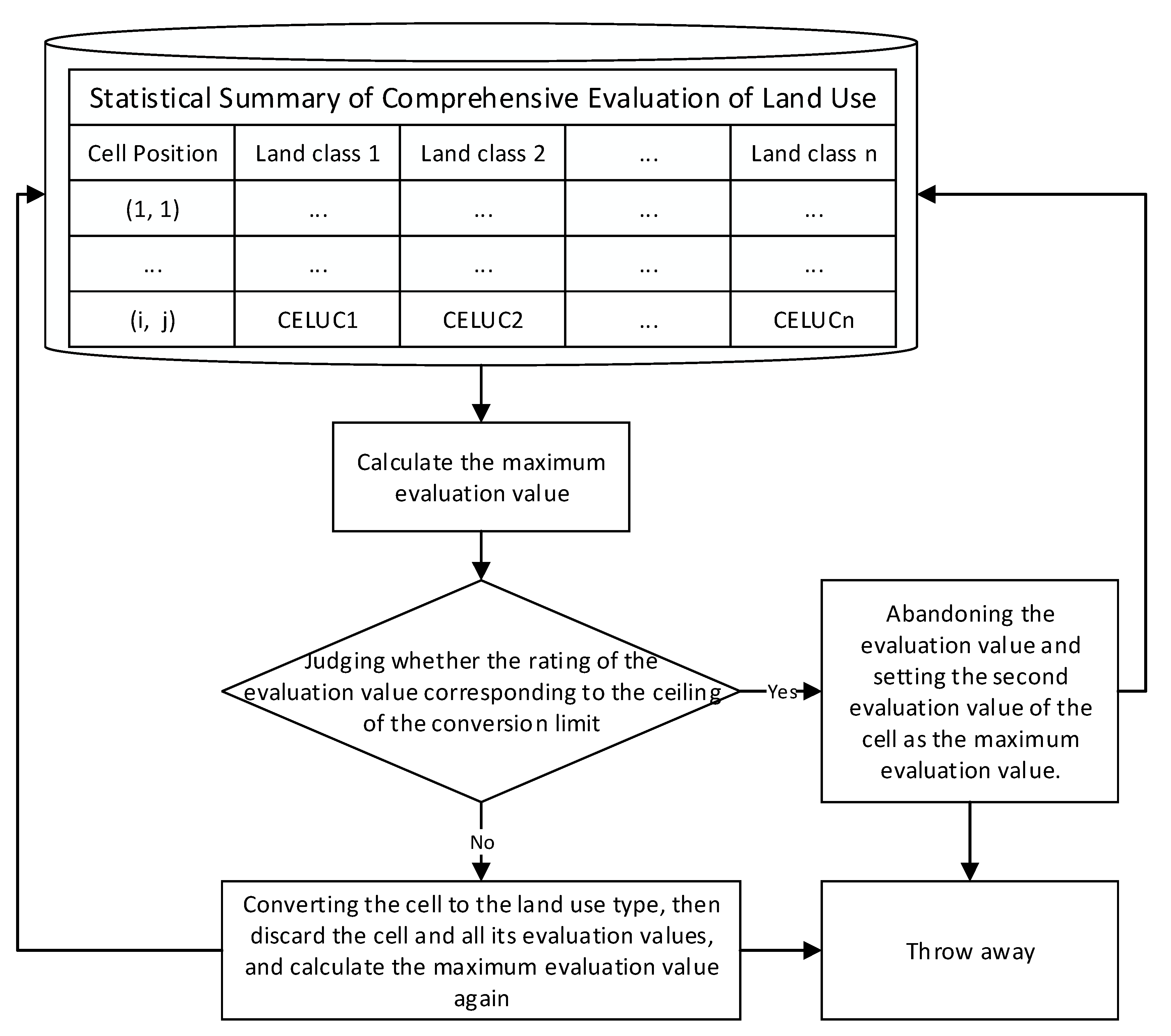
3.4. Cell Land-Use-Type Conversion
- ①
- Calculating the maximum evaluation value from the table of statistical summary of comprehensive evaluation that was obtained from Cloud-CELUC.
- ②
- Loop reading each row of the table. Each row was a key-value pair ((i, j), CELUCs), where (i, j) is the position of the cell, CELUCs means cell (i, j) has N kinds of land-use conversion possibilities (CELUC), and CELUCi means the ith CELUC of the cell.
- ③
- Determining whether the area of the converted land-use type reached the upper area limit of this land-use-type conversion or not.
- ④
- If reaching the upper area limit, the CELUCi of the cell should be marked as 0, meaning that one of the cell (i, j)’s CELUCi was deleted to make sure the CELUCi would not be used in the subsequent steps. Then, it returns to the first step.
- ⑤
- Repeating the above steps until all cells completed conversion, and finally obtaining the prediction of the whole land-use-change distribution, which was stored as an array. Each item of the array was a key-value pair ((i, j), CELUC).
4. Results and Discussion
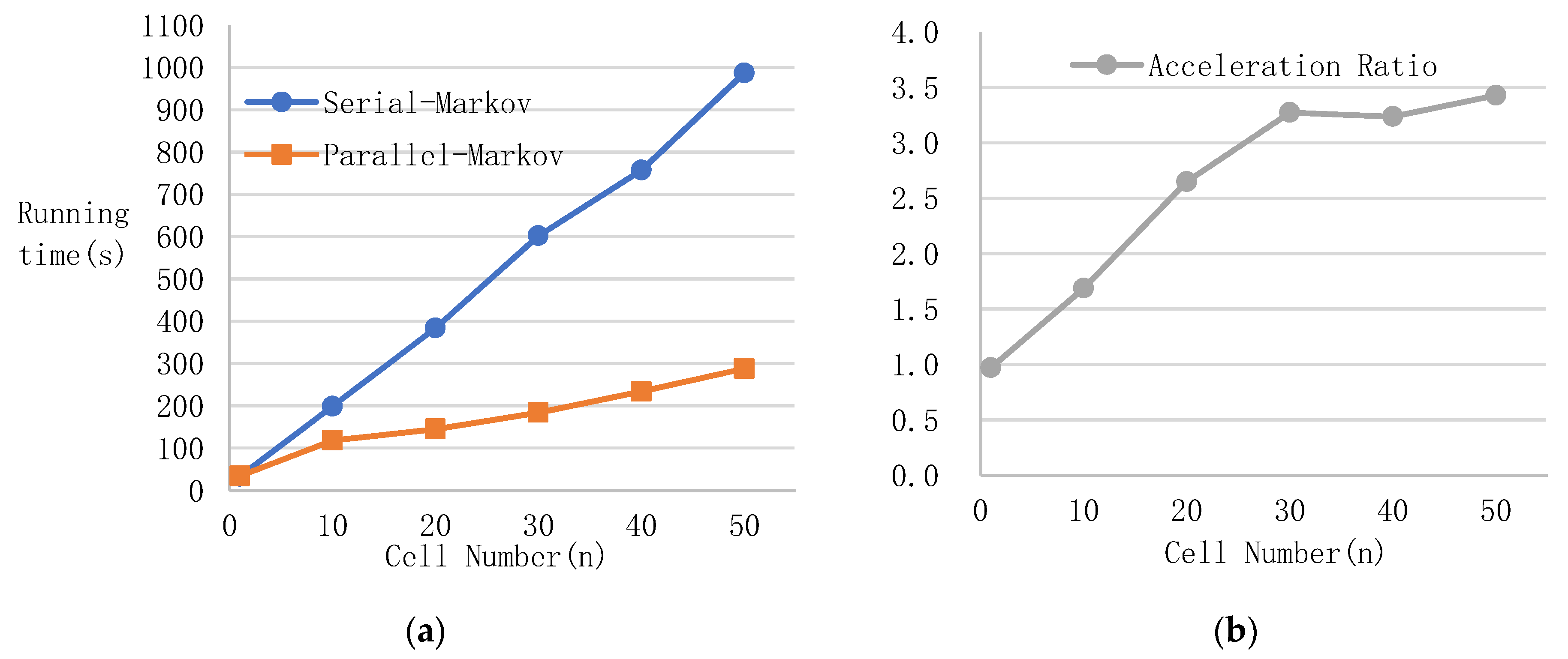
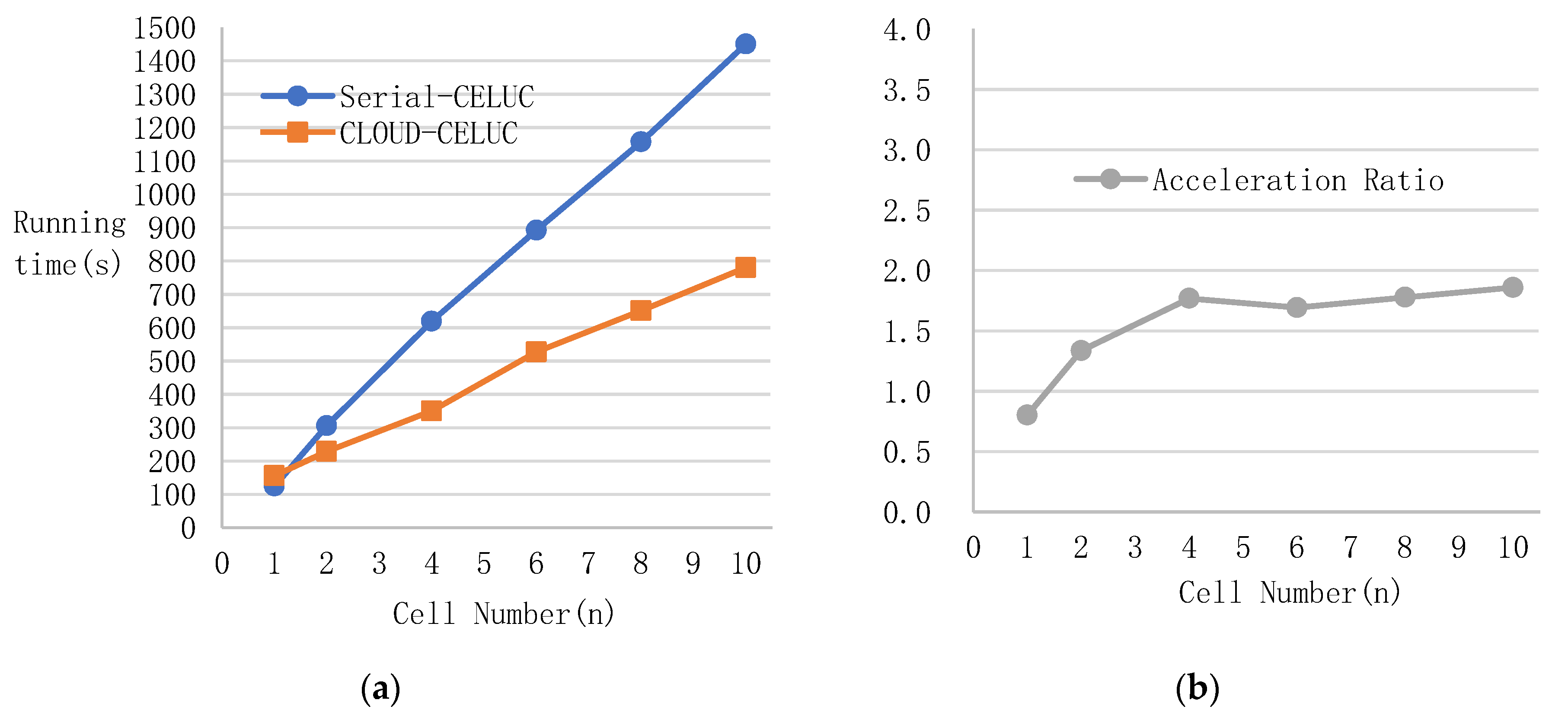
4.1. Model-Efficiency Analysis
4.2. Precision Evaluation and Result Analysis
4.2.1. Precision Evaluation
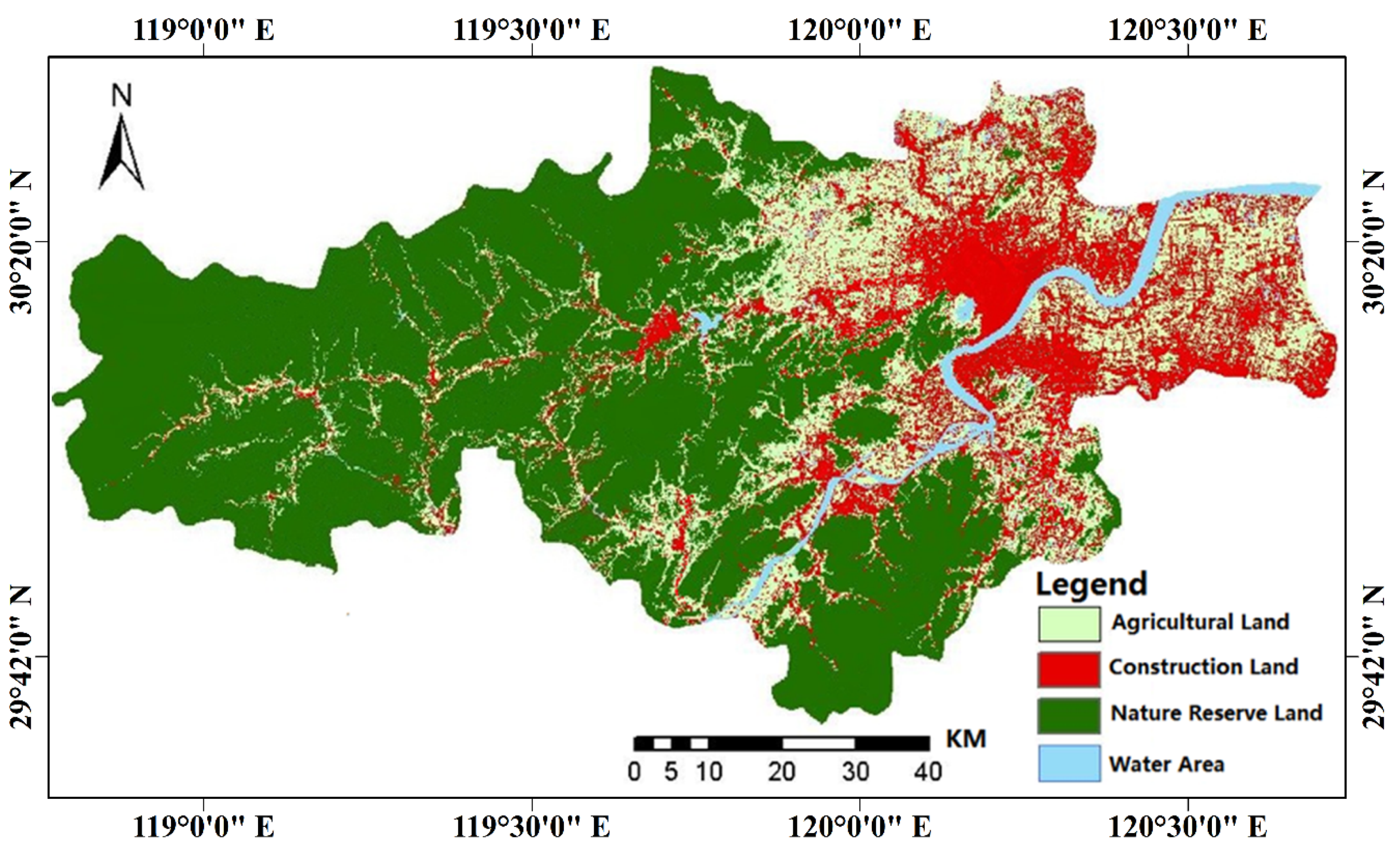
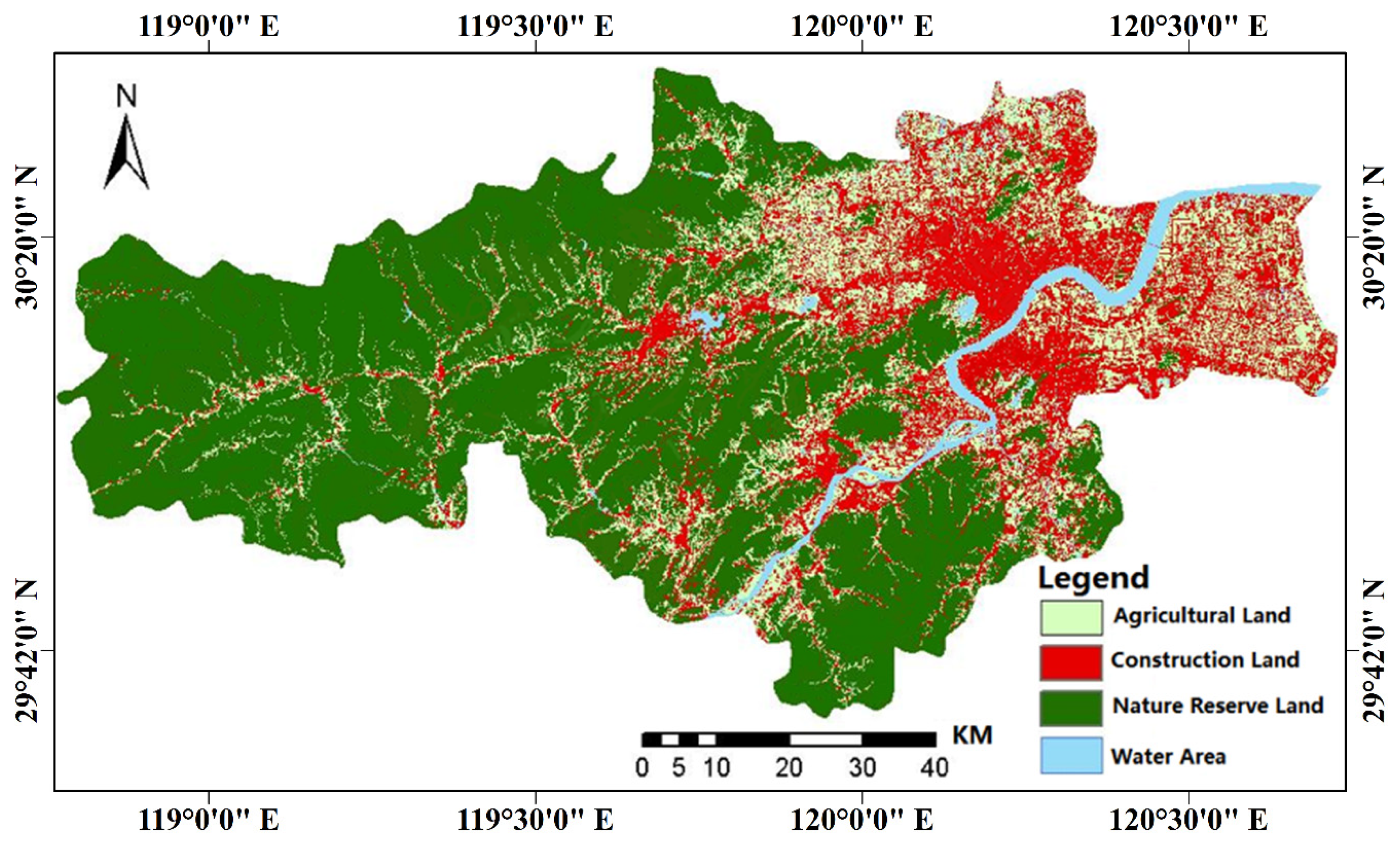
4.2.2. Land-Use-Change Prediction
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Veldkamp, A.; Lambin, E. Predicting land-use change. Agric. Ecosyst. Environ. 2001, 85, 1–6. [Google Scholar] [CrossRef]
- Li, X. A review of the international researches on land use/land cover change. ACTA Geogr. Sin. Ed. 1996, 51, 558–565. [Google Scholar]
- Wijesekara, G.N.; Farjad, B.; Gupta, A.; Qiao, Y.; Delaney, P.; Marceau, D.J. A comprehensive land-use/hydrological modeling system for scenario simulations in the Elbow River watershed, Alberta, Canada. Environ. Manag. 2014, 53, 357–381. [Google Scholar] [CrossRef] [PubMed]
- Verburg, P.H.; Soepboer, W.; Veldkamp, A.; Limpiada, R.; Espaldon, V.; Mastura, S.S.A. Modeling the spatial dynamics of regional land use: The CLUE-S model. Environ. Manag. 2002, 30, 391–405. [Google Scholar] [CrossRef] [PubMed]
- White, R.; Engelen, G. Cellular Automata and Fractal Urban Form: A Cellular Modelling Approach to the Evolution of Urban Land-Use Patterns. Environ. Plan. A Econ. Spec. 1993, 25, 1175–1199. [Google Scholar] [CrossRef]
- Clarke, K.C.; Hoppen, S.; Gaydos, L. A self-modifying cellular automaton model of historical urbanization in the San Francisco Bay area. Environ. Plan. B Plan. Des. 1997, 24, 247–261. [Google Scholar] [CrossRef]
- Zhang, C.; Li, W. Markov chain modeling of multinomial land-cover classes. GISci. Remote Sens. 2005, 42, 1–18. [Google Scholar] [CrossRef][Green Version]
- Fu, X.; Wang, X.; Yang, Y.J. Deriving suitability factors for CA-Markov land use simulation model based on local historical data. J. Environ. Manag. 2018, 206, 10–19. [Google Scholar]
- Jantz, C.A.; Goetz, S.J.; Shelley, M.K. Using the SLEUTH urban growth model to simulate the impacts of future policy scenarios on urban land use in the Baltimore-Washington metropolitan area. Environ. Plan. B Plan. Des. 2004, 31, 251–271. [Google Scholar] [CrossRef]
- Dietzel, C.; Clarke, K.C. Toward optimal calibration of the SLEUTH land use change model. Trans. GIS 2007, 11, 29–45. [Google Scholar] [CrossRef]
- Serneels, S.; Lambin, E.F. Proximate causes of land-use change in Narok district, Kenya: A spatial statistical model. Agric. Ecosyst. Environ. 2001, 85, 65–81. [Google Scholar] [CrossRef]
- Wolfram, S. Cellular automata as models of complexity. Nature 1984, 311, 419–424. [Google Scholar] [CrossRef]
- Batty, M.; Xie, Y.; Sun, Z. Modeling urban dynamics through GIS-based cellular automata. Comput. Environ. Urban Syst. 1999, 23, 205–233. [Google Scholar] [CrossRef]
- Li, X.; Yeh, A.G.-O. Neural-network-based cellular automata for simulating multiple land use changes using GIS. Int. J. Geogr. Inf. Sci. 2002, 16, 323–343. [Google Scholar] [CrossRef]
- Yang, Q.; Li, X.; Shi, X. Cellular automata for simulating land use changes based on support vector machines. Comput. Geosci. 2008, 34, 592–602. [Google Scholar] [CrossRef]
- Yang, X.; Zheng, X.-Q.; Lv, L.-N. A spatiotemporal model of land use change based on ant colony optimization, Markov chain and cellular automata. Ecol. Model. 2012, 233, 11–19. [Google Scholar] [CrossRef]
- Rimal, B.; Zhang, L.; Keshtkar, H.; Wang, N.; Lin, Y. Monitoring and Modeling of Spatiotemporal Urban Expansion and Land-Use/Land-Cover Change Using Integrated Markov Chain Cellular Automata Model. ISPRS Int. J. Geo. Inf. 2017, 6, 288. [Google Scholar] [CrossRef]
- Subedi, P.; Subedi, K.; Thapa, B. Application of a Hybrid Cellular Automaton—Markov (CA-Markov) Model in Land-Use Change Prediction: A Case Study of Saddle Creek Drainage Basin, Florida. Appl. Ecol. Environ. Sci. 2013, 1, 126–132. [Google Scholar]
- Bacani, V.M.; Sakamoto, A.Y.; Quénol, H.; Vannier, C.; Corgne, S. Markov chains-cellular automata modeling and multicriteria analysis of land cover change in the Lower Nhecolândia subregion of the Brazilian Pantanal wetland. J. Appl. Remote Sens. 2016, 10, 016004. [Google Scholar] [CrossRef]
- Araya, Y.H.; Cabral, P. Analysis and modeling of urban land cover change in Setúbal and Sesimbra, Portugal. Remote Sens. 2010, 2, 1549–1563. [Google Scholar] [CrossRef]
- Halmy, M.W.A.; Gessler, P.E.; Hicke, J.A.; Salem, B.B. Land use/land cover change detection and prediction in the north-western coastal desert of Egypt using Markov-CA. Appl. Geogr. 2015, 63, 101–112. [Google Scholar] [CrossRef]
- Hishe, S.; Bewket, W.; Nyssen, J.; Lyimo, J. Analysing past land use land cover change and CA-Markov-based future modelling in the Middle Suluh Valley, Northern Ethiopia. Geocarto Int. 2019, 1–31. [Google Scholar] [CrossRef]
- Rahman, M.T.U.; Tabassum, F.; Rasheduzzaman, M.; Saba, H.; Sarkar, L.; Ferdous, J.; Uddin, S.Z.; Islam, A.Z.M.Z. Temporal dynamics of land use/land cover change and its prediction using CA-ANN model for southwestern coastal Bangladesh. Environ. Monit. Assess. 2017, 189, 565. [Google Scholar] [CrossRef] [PubMed]
- Memarian, H.; Kumar Balasundram, S.; Bin Talib, J.; Teh Boon Sung, C.; Mohd Sood, A.; Abbaspour, K. Validation of CA-Markov for Simulation of Land Use and Cover Change in the Langat Basin, Malaysia. J. Geogr. Inf. Syst. 2012, 4, 542–554. [Google Scholar] [CrossRef]
- Liang, J.; Zhong, M.; Zeng, G.; Chen, G.; Hua, S.; Li, X.; Yuan, Y.; Wu, H.; Gao, X. Risk management for optimal land use planning integrating ecosystem services values: A case study in Changsha, Middle China. Sci. Total Environ. 2017, 579, 1675–1682. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.H.; Andersson, C. Assessing the impact of temporal dynamics on land-use change modeling. Comput. Environ. Urban Syst. 2004, 28, 107–124. [Google Scholar] [CrossRef]
- Mobaied, S.; Riera, B.; Lalanne, A.; Baguette, M.; Machon, N. The use of diachronic spatial approaches and predictive modelling to study the vegetation dynamics of a managed heathland. Biodivers. Conserv. 2011, 20, 73–88. [Google Scholar] [CrossRef]
- Alsharif, A.A.A.; Pradhan, B. Urban Sprawl Analysis of Tripoli Metropolitan City (Libya) Using Remote Sensing Data and Multivariate Logistic Regression Model. J. Indian Soc. Remote Sens. 2014, 42, 149–163. [Google Scholar] [CrossRef]
- Guan, Q.; Clarke, K.C. A general-purpose parallel raster processing programming library test application using a geographic cellular automata model. Int. J. Geogr. Inf. Sci. 2010, 24, 695–722. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Yeh, A.; Liu, X. Parallel cellular automata for large-scale urban simulation using load-balancing techniques. Int. J. Geogr. Inf. Sci. 2010, 24, 803–820. [Google Scholar] [CrossRef]
- Li, D.; Li, X.; Liu, X.P.; Chen, Y.M.; Li, S.Y.; Liu, K.; Qiao, J.G.; Zheng, Y.Z.; Zhang, Y.H.; Lao, C.H. GPU-CA model for large-scale land-use change simulation. Chin. Sci. Bull. 2012, 57, 2442–2452. [Google Scholar] [CrossRef]
- Guan, Q.; Shi, X.; Huang, M.; Lai, C. A hybrid parallel cellular automata model for urban growth simulation over GPU/CPU heterogeneous architectures. Int. J. Geogr. Inf. Sci. 2016, 30, 494–514. [Google Scholar] [CrossRef]
- Rathore, M.M.U.; Paul, A.; Ahmad, A.; Chen, B.; Huang, B.; Ji, W. Real-Time Big Data Analytical Architecture for Remote Sensing Application. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4610–4621. [Google Scholar] [CrossRef]
- Rao, J.; Wu, B.; Dong, Y.-X. Parallel Link Prediction in Complex Network Using MapReduce. J. Softw. 2014, 23, 3175–3186. [Google Scholar] [CrossRef]
- Wiley, K.; Connolly, A. Astronomical image processing with hadoop. Astron. Data Anal. Softw. Syst. 2010, 442, 93–96. [Google Scholar]
- Almeer, M.H. Cloud Hadoop Map Reduce For Remote Sensing Image Analysis. J. Emerg. Trends Comput. Inf. Sci. 2012, 3, 637–644. [Google Scholar]
- Dang, L.M.; Ibrahim Hassan, S.; Suhyeon, I.; Sangaiah, A.K.; Mehmood, I.; Rho, S.; Seo, S.; Moon, H. UAV based wilt detection system via convolutional neural networks. Sustain. Comput. Inform. Syst. 2018, in press. [Google Scholar] [CrossRef]
- Sankey, T.T.; McVay, J.; Swetnam, T.L.; McClaran, M.P.; Heilman, P.; Nichols, M. UAV hyperspectral and lidar data and their fusion for arid and semi-arid land vegetation monitoring. Remote Sens. Ecol. Conserv. 2018, 4, 20–33. [Google Scholar] [CrossRef]
- Lanorte, A.; De Santis, F.; Nolè, G.; Blanco, I.; Loisi, R.V.; Schettini, E.; Vox, G. Agricultural plastic waste spatial estimation by Landsat 8 satellite images. Comput. Electron. Agric. 2017, 141, 35–45. [Google Scholar] [CrossRef]
- Du, Z.; Li, W.; Zhou, D.; Tian, L.; Ling, F.; Wang, H.; Gui, Y.; Sun, B. Analysis of Landsat-8 OLI imagery for land surface water mapping. Remote Sens. Lett. 2014, 5, 672–681. [Google Scholar] [CrossRef]
- Jia, K.; Wei, X.; Gu, X.; Yao, Y.; Xie, X.; Li, B. Land cover classification using Landsat 8 Operational Land Imager data in Beijing, China. Geocarto Int. 2014, 29, 941–951. [Google Scholar] [CrossRef]
- Dean, J.; Ghemawat, S. MapReduce. Commun. ACM 2008, 51, 107. [Google Scholar] [CrossRef]
- Guan, D.; Gao, W.; Watari, K.; Fukahori, H. Land use change of Kitakyushu based on landscape ecology and Markov model. J. Geogr. Sci. 2008, 18, 455–468. [Google Scholar] [CrossRef]
- White, R.; Engelen, G.; Uljee, I. The use of constrained cellular automata for high-resolution modelling of urban land-use dynamics. Environ. Plan. B Plan. Des. 1997, 24, 323–343. [Google Scholar] [CrossRef]
- CARVER, S.J. Integrating multi-criteria evaluation with geographical information systems. Int. J. Geogr. Inf. Syst. 1991, 5, 321–339. [Google Scholar] [CrossRef]
- Saaty, T.L.; Vargas, L.G. Models, Methods, Concepts & Applications of the Analytic Hierarchy Process; Springer Science & Business Media: New York, NY, USA, 2001; ISBN 978-1-4613-5667-7. [Google Scholar]
- Qiu, B.; Chen, C. Land use change simulation model based on MCDM and CA and its application. Acta Geogr. Sin. Ed. 2008, 63, 165–174. [Google Scholar]
- Foody, G.M. Map comparison in GIS. Prog. Phys. Geogr. 2007, 31, 439–445. [Google Scholar] [CrossRef]
- Landis, J.R.; Koch, G.G. The Measurement of Observer Agreement for Categorical Data. Biometrics 1977, 33, 159. [Google Scholar] [CrossRef]
- Viera, A.J.; Garrett, J.M. Understanding interobserver agreement: The kappa statistic. Fam. Med. 2005, 37, 360–363. [Google Scholar]
- van Vliet, J.; Bregt, A.K.; Hagen-Zanker, A. Revisiting Kappa to account for change in the accuracy assessment of land-use change models. Ecol. Model. 2011, 222, 1367–1375. [Google Scholar] [CrossRef]
- Bu, R.C.; Chang, Y.; Hu, Y.M.; Li, X.Z.; He, H.S. Measuring spatial information changes using Kappa coefficients: A case study of the city groups in central Liaoning province. Acta Ecol. Sin. 2005, 205, 4. [Google Scholar]
- Mora, A.D.; Vieira, P.M.; Manivannan, A.; Fonseca, J.M. Automated drusen detection in retinal images using analytical modelling algorithms. Biomed. Eng. Online 2011, 10, 59. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level 1. | Level 2 | Definition |
|---|---|---|
| Construction land (B) | Land for construction (B1), land for transportation (B2) | Land for buildings and structures. |
| Agricultural land (A) | Cultivated land (A1), garden (A2) | Land for agricultural production. |
| Water area (W) | Waters (W1), swampland (W2) | River surface, lake surface, swamp. |
| Nature reserve (N) | Forest (N1), grassland (N2), unused land (N3) | Land with little or no human activity that did not include agricultural land, construction land, and waters. |
| Factor Name | Definition | Classification |
|---|---|---|
| FreLev | Distance from cell to highway. | Cell distance from main road or town center: 0–250, 250–500, 500–750, 750–1000, and 1000–1250 m. |
| TownLev | Distance from cell to town center. | |
| SubLev | Distance from cell to subway station. | Cell distance to subway or bus station, other roads: 0–100, 100–200, 200–300, 300–400, and 400–500 m. |
| BusLev | Distance from cell to bus stop. | |
| MainLev | Distance from cell to other roads. | |
| TraLev | Distance from cell to train station. | Cell distance to train or bus station: 0–200, 200–400, 400–600, 600–800, and 800–1000 m. |
| StaLev | Distance from cell to bus station. | |
| CityLev | Distance from cell to county center. | Cell distance to main road or county center: 500–1000, 1000–1500, 1500–2000, and 2000–2500 m. |
| Factor Name | Agricultural Land | Construction Land | Nature Reserve |
|---|---|---|---|
| FreLev | 0.0485 | 0.0461 | 0.0781 |
| TownLev | 0.1239 | 0.1332 | 0.1010 |
| SubLev | 0.0621 | 0.1320 | 0.0133 |
| BusLev | 0.0721 | 0.1110 | 0.0513 |
| MainLev | 0.0921 | 0.1102 | 0.0749 |
| TraLev | 0.0423 | 0.1333 | 0.0201 |
| StaLev | 0.0623 | 0.1321 | 0.0203 |
| StaLev | 0.0923 | 0.2021 | 0.0103 |
| IP Address | Node Role | CPU | RAM |
|---|---|---|---|
| 192.168.128.1 | Master/Namenode/Jobtracker | Four-core 2.4 Ghz | 4 G |
| 192.168.128.2 | Slaves/Datanode/Tasktracker | Four-core 2.4 Ghz | 4 G |
| 192.168.128.3 | Slaves/Datanode/Tasktracker | Four-core 2.4 Ghz | 4 G |
| 192.168.128.4 | Slaves/Datanode/Tasktracker | Four-core 2.4 Ghz | 4 G |
| 192.168.128.5 | Slaves/Datanode/Tasktracker | Four-core 2.4 Ghz | 4 G |
| 2013 | Agricultural Land | Construction Land | Nature Reserve | Total | |
|---|---|---|---|---|---|
| 2006 | |||||
| Agricultural land | 1282.95 | 409.71 | 95.67 | 1788.33 | |
| Construction land | 210.94 | 1381.69 | 12.52 | 1605.15 | |
| Nature-reserve land | 93.39 | 50.79 | 4409.60 | 4553.78 | |
| Total | 1587.28 | 1842.19 | 4517.79 | 7947.26 | |
| 2013 | Agricultural Land | Construction Land | Nature Reserve | |
|---|---|---|---|---|
| 2006 | ||||
| Agricultural land | 71.74 | 22.91 | 5.35 | |
| Construction land | 13.14 | 86.08 | 0.78 | |
| Nature-reserve land | 2.05 | 1.12 | 96.83 | |
| Simulated Data | Nature Reserve | Non-Nature Reserve | Total | Accuracy | Kappa | |
|---|---|---|---|---|---|---|
| Classified Data | ||||||
| Nature-reserve land | 4221.35 | 288.47 | 4509.82 | 93.60% | 0.86 | |
| Non-nature-reserve land | 296.44 | 3431.50 | 3727.94 | 92.05% | ||
| Total | 4517.79 | 3717.97 | ||||
| Simulated Data | Construction Land | Non-Construction Land | Total | Accuracy | Kappa | |
|---|---|---|---|---|---|---|
| Classified Data | ||||||
| Construction land | 1391.41 | 452.77 | 1844.18 | 75.45% | 0.68 | |
| Non-construction land | 450.78 | 5942.80 | 6393.58 | 92.95% | ||
| Total | 1842.19 | 6395.57 | ||||
| Simulated Data | Agricultural Land | Non-Agricultural Land | Total | Accuracy | Kappa | |
|---|---|---|---|---|---|---|
| Classified Data | ||||||
| Agricultural land | 1152.64 | 427.17 | 1579.81 | 72.96% | 0. 66 | |
| Non-agricultural land | 434.65 | 6223.30 | 6657.95 | 93.47% | ||
| Total | 1587.29 | 6650.47 | ||||
| 2020 | Agricultural Land | Construction Land | Nature Reserve | Total | |
|---|---|---|---|---|---|
| 2013 | |||||
| Agricultural land | 1133.35 | 361.94 | 84.52 | 1579.81 | |
| Construction land | 242.35 | 1587.45 | 14.38 | 1844.18 | |
| Nature-reserve land | 92.49 | 50.30 | 4367.03 | 4509.82 | |
| Total | 1468.19 | 1999.69 | 4465.93 | 7933.81 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, J.; Fang, L.; Li, S.; Wang, X. Parallel Cellular Automata Markov Model for Land Use Change Prediction over MapReduce Framework. ISPRS Int. J. Geo-Inf. 2019, 8, 454. https://doi.org/10.3390/ijgi8100454
Kang J, Fang L, Li S, Wang X. Parallel Cellular Automata Markov Model for Land Use Change Prediction over MapReduce Framework. ISPRS International Journal of Geo-Information. 2019; 8(10):454. https://doi.org/10.3390/ijgi8100454
Chicago/Turabian StyleKang, Junfeng, Lei Fang, Shuang Li, and Xiangrong Wang. 2019. "Parallel Cellular Automata Markov Model for Land Use Change Prediction over MapReduce Framework" ISPRS International Journal of Geo-Information 8, no. 10: 454. https://doi.org/10.3390/ijgi8100454
APA StyleKang, J., Fang, L., Li, S., & Wang, X. (2019). Parallel Cellular Automata Markov Model for Land Use Change Prediction over MapReduce Framework. ISPRS International Journal of Geo-Information, 8(10), 454. https://doi.org/10.3390/ijgi8100454