Analysis of Scattering Properties of Continuous Slow-Release Slicks on the Sea Surface Based on Polarimetric Synthetic Aperture Radar



Abstract
1. Introduction
2. Experimental Design and Methodology
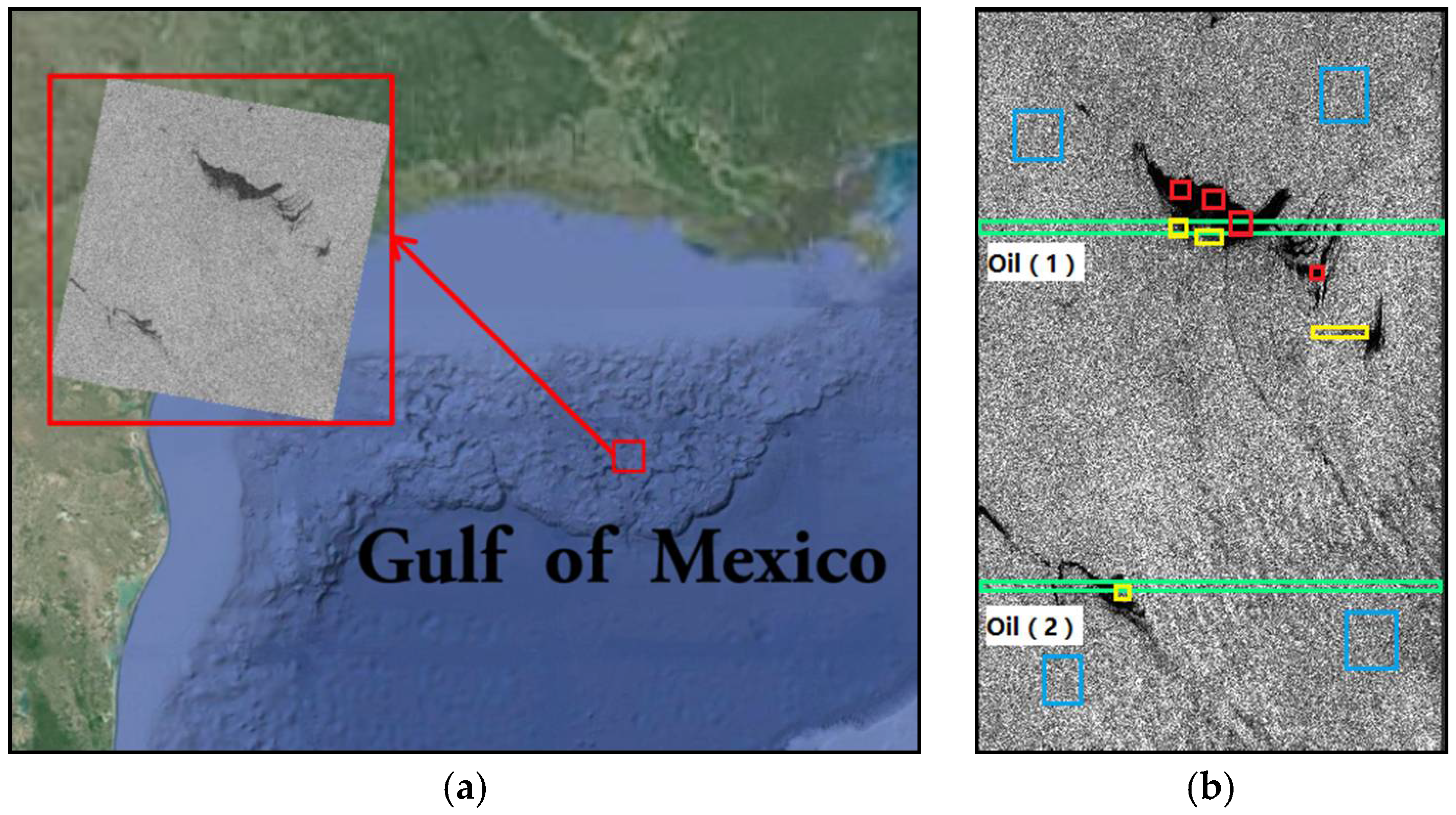
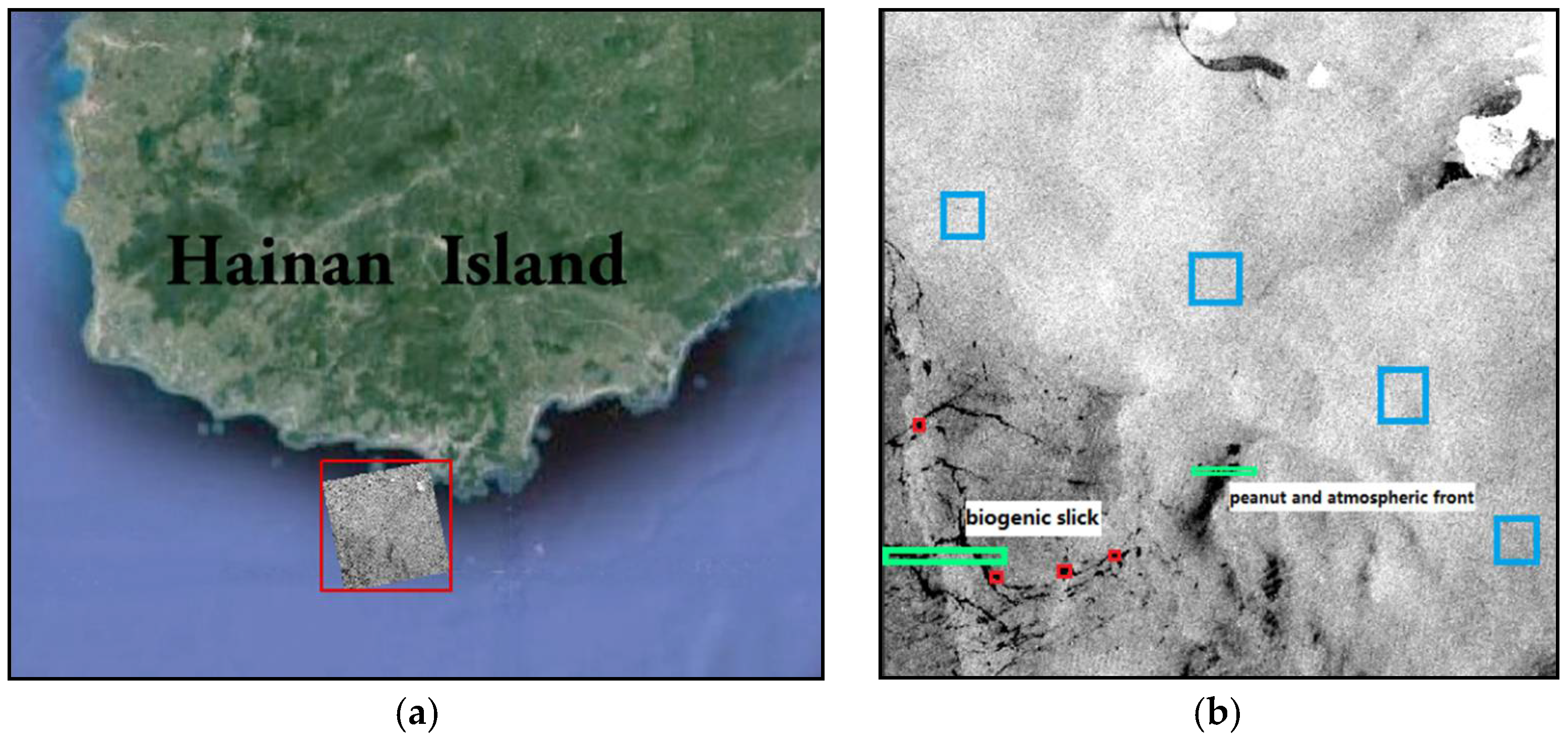
2.1. Experimental Design
2.2. Dataset
2.3. Noise Analysis
2.4. Methodology
3. Results
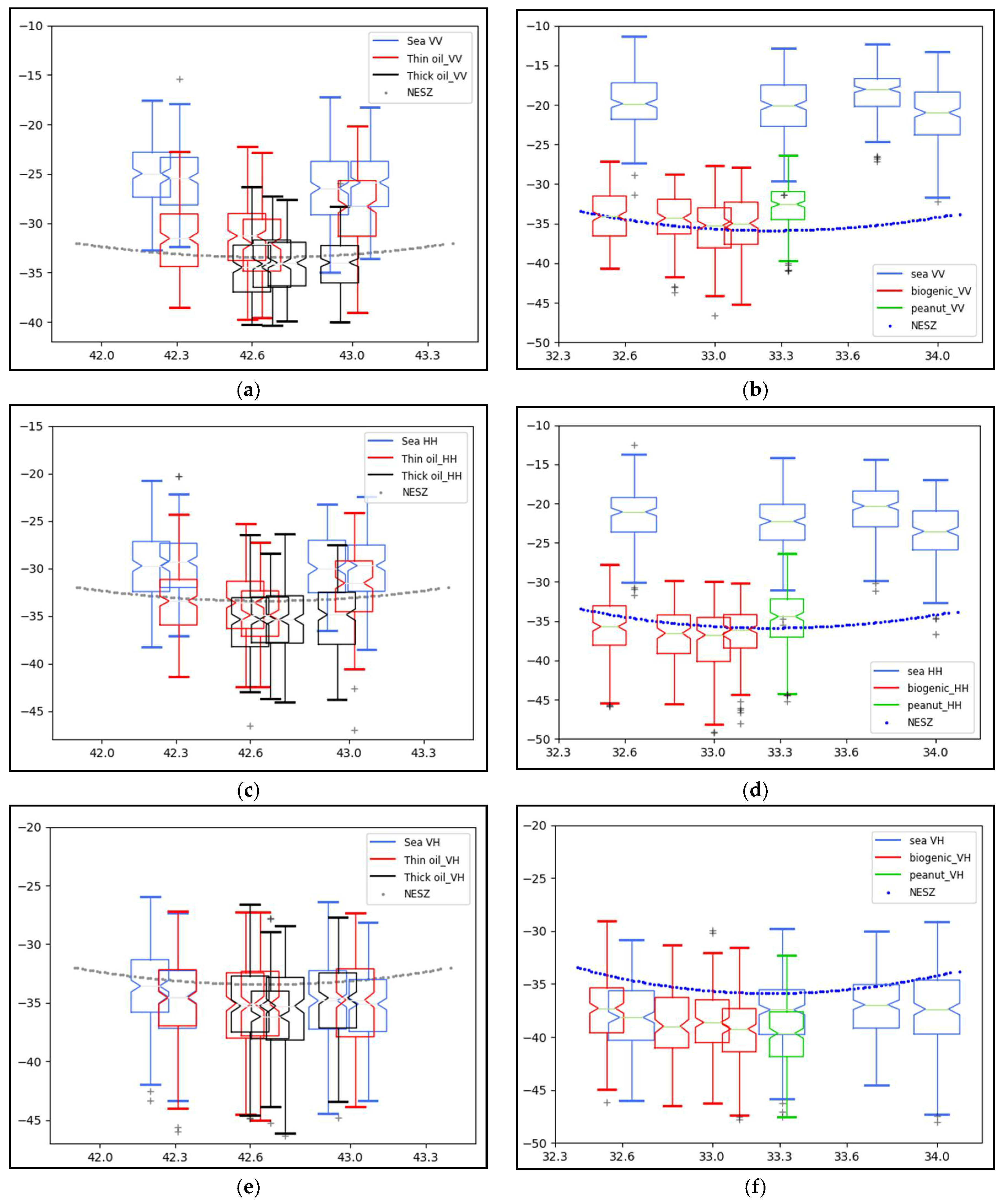
3.1. NESZ Analysis
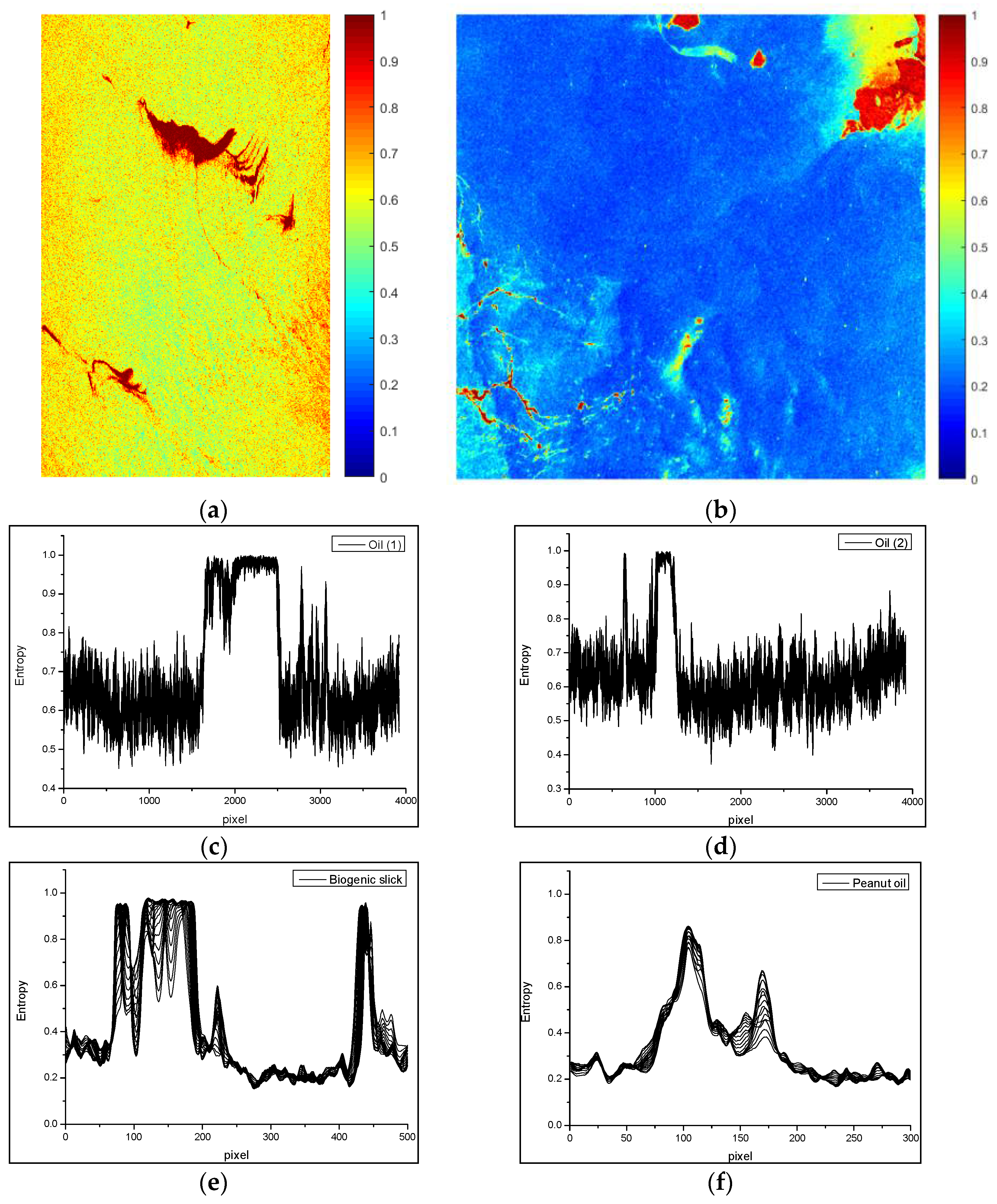
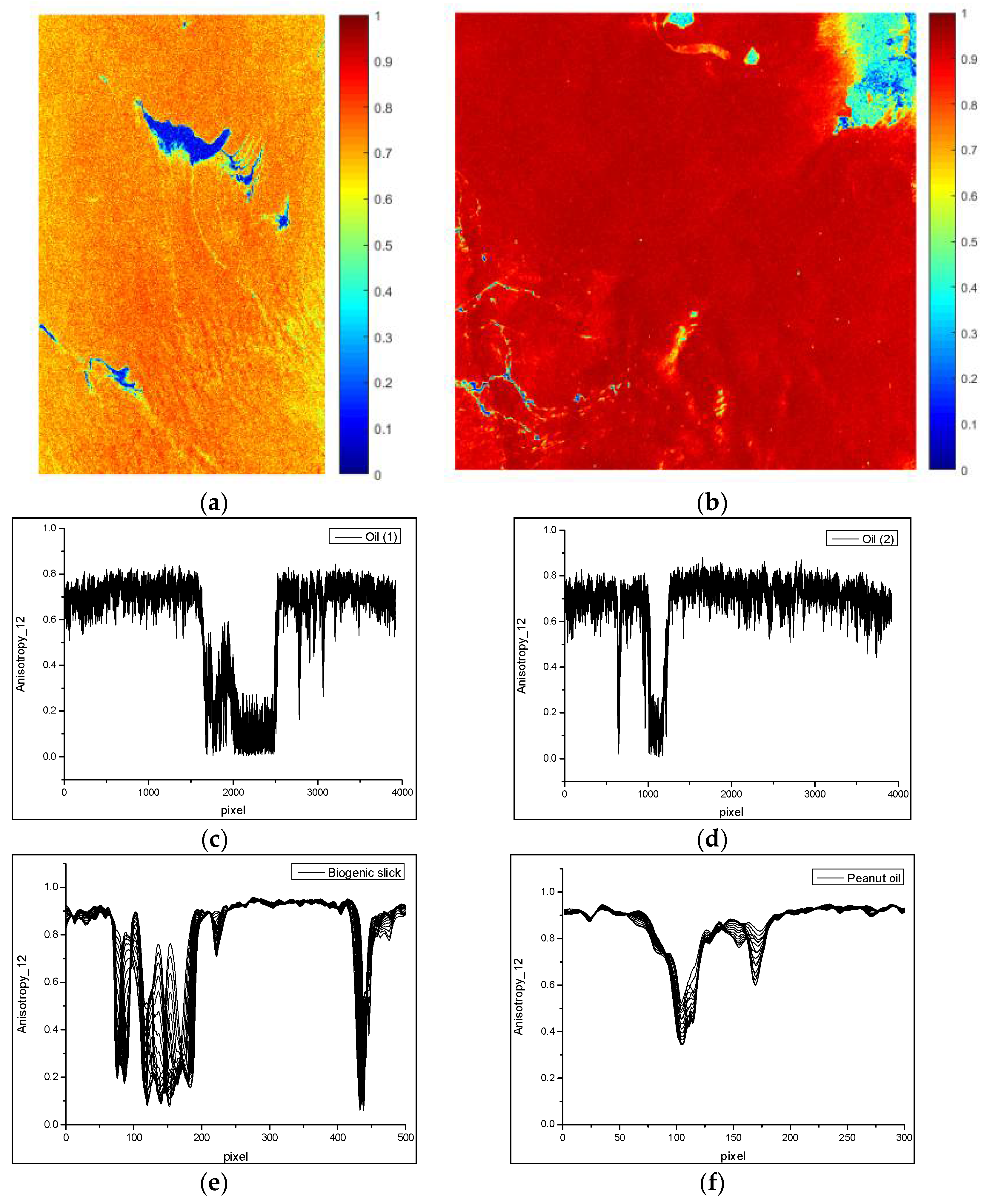
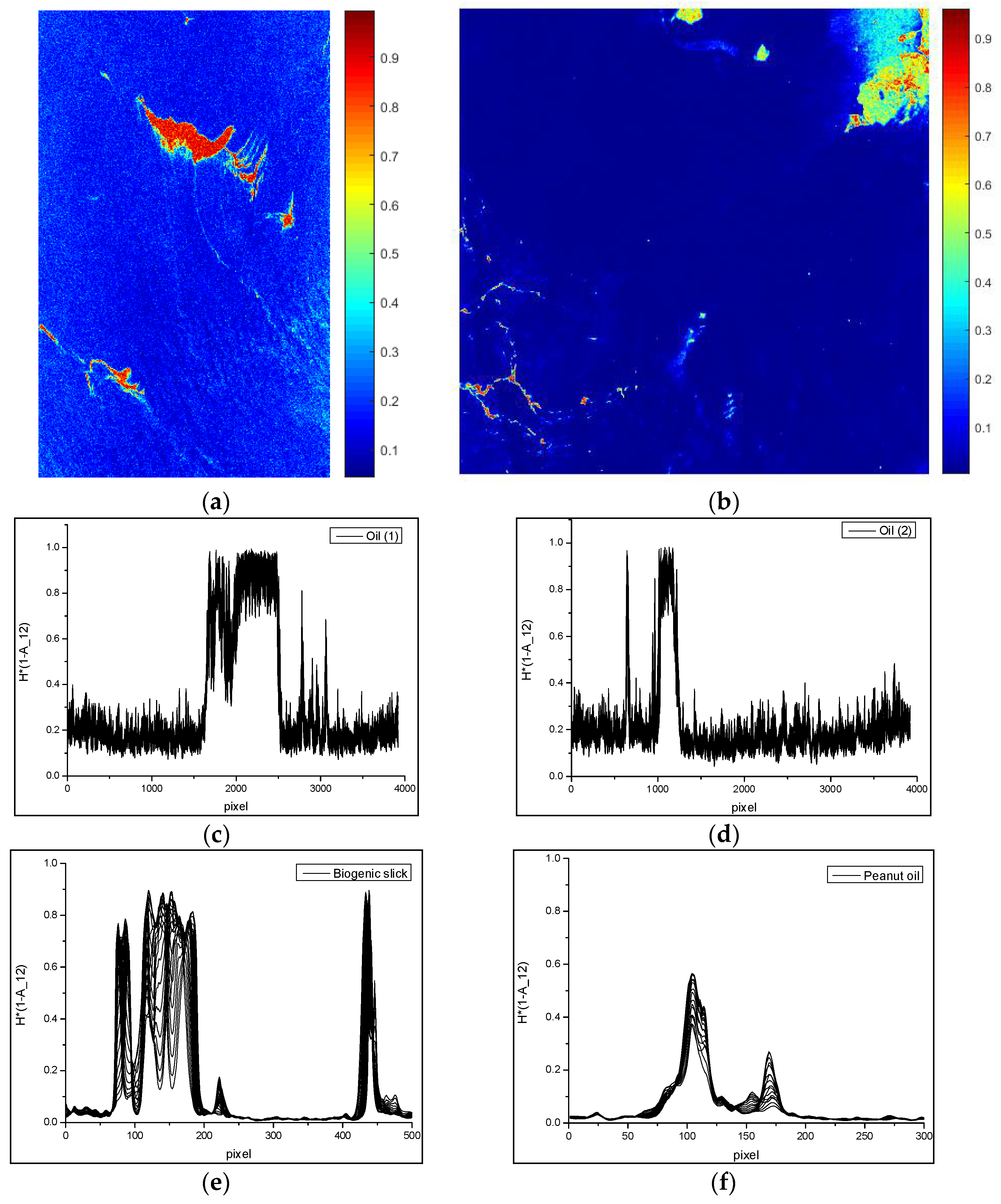
3.2. Polarization Parameters of Continuous Slow-Release Slick
4. Discussion
4.1. Analysis of Instrument Noise and NRCS
4.2. Analysis of Polarization Scattering Characteristics
5. Conclusions
- Images acquired at small incident angles have higher SNR than those with large incident angles under the same RADARSAT-2 system. The NRCS of cross-polarization channels are lower than those of co-polarization channels, which are more seriously affected by the noise floor because of their proximity to the NESZ baseline.
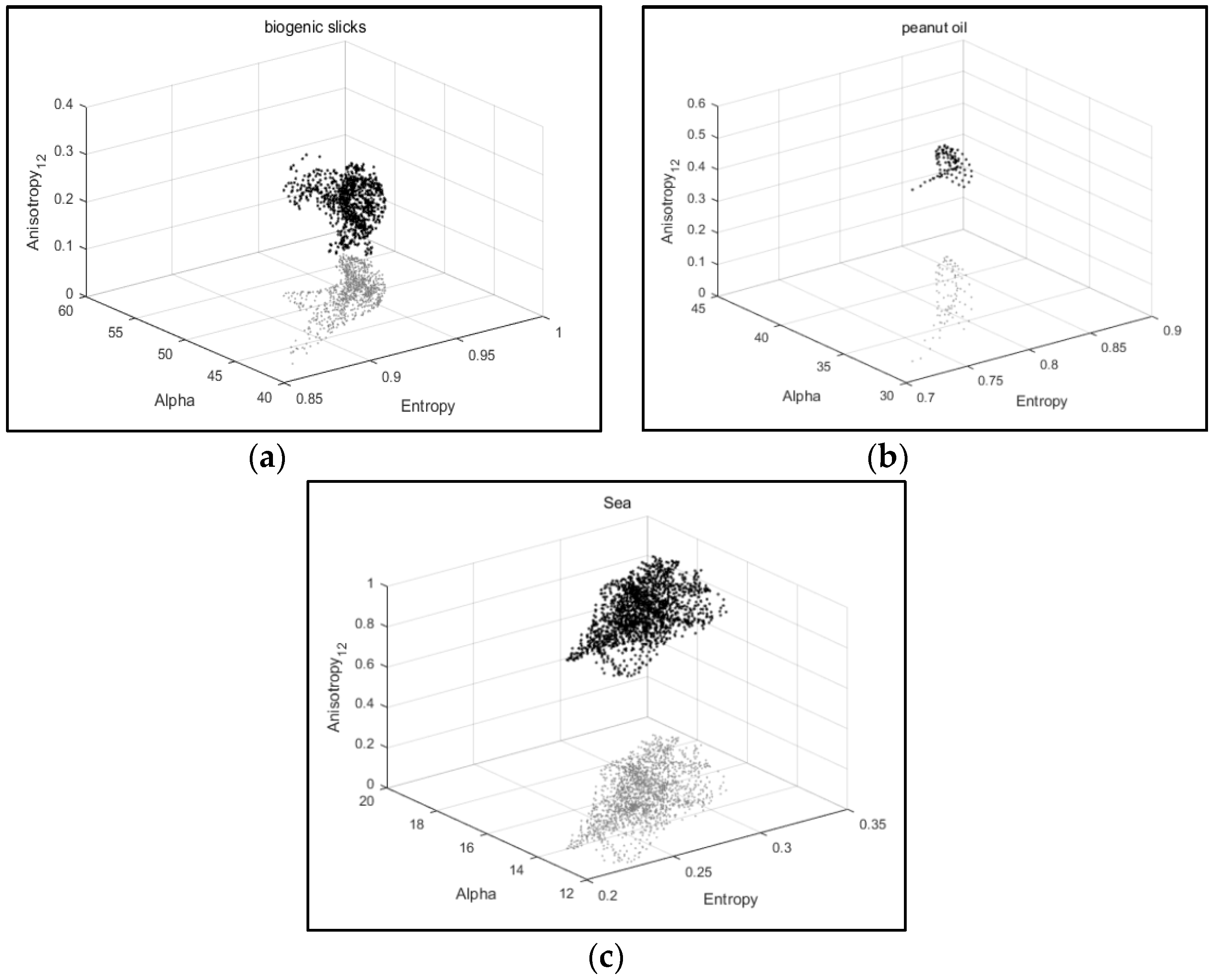
- The polarimetric scattering properties of continuous slow-release slicks differ from those of clean seawater, even for anthropogenic ocean surface slicks, since continuous slow-release slicks exhibit complex, multiple scattering mechanisms, possibly as a result of the comprehensive influence of surface scattering, volume scattering, and the noise floor. In addition, continuous slow-release (biogenic) slicks exhibit greater damping characteristics and more complex random scattering characteristics than anthropogenic ocean surface slicks (simulated with peanut oil) in this experiment.
- For slick detection, the combinations of entropy (H) and modified anisotropy (A12) permit fairly robust identification of slicks from SAR images under different sea conditions.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fingas, M.; Brown, C. A review of oil spill remote sensing. Sensors (Basel) 2018, 2, 91. [Google Scholar]
- Hou, Y.; Li, Y.; Liu, B.; Liu, Y.; Wang, T. Design and implementation of a coastal-mounted sensor for oil film detection on seawater. Sensors (Basel) 2018, 2, 70. [Google Scholar] [CrossRef] [PubMed]
- Liu, B.; Li, Y.; Liu, C.; Xie, F.; Muller, J.-P. Hyperspectral features of oil-polluted sea ice and the response to the contamination area fraction. Sensors (Basel) 2018, 2, 234. [Google Scholar] [CrossRef] [PubMed]
- Cui, C.; Li, Y.; Liu, B.; Li, G. A new endmember preprocessing method for the hyperspectral unmixing of imagery containing marine oil spills. ISPRS Int. J. Geo-Inf. 2017, 9, 286. [Google Scholar] [CrossRef]
- Alves, T.M.; Kokinou, E.; Zodiatis, G.; Lardner, R. Hindcast, GIS and susceptibility modelling to assist oil spill clean-up and mitigation on the southern coast of Cyprus (Eastern Mediterranean). Deep Sea Res. Part II Top. Stud. Oceanogr. 2016, 133, 159–175. [Google Scholar] [CrossRef]
- Alves, T.M.; Kokinou, E.; Zodiatis, G. A three-step model to assess shoreline and offshore susceptibility to oil spills: The South Aegean (Crete) as an analogue for confined marine basins. Mar. Pollut. Bull. 2014, 86, 443–457. [Google Scholar] [CrossRef] [PubMed]
- Alves, T.M.; Kokinou, E.; Zodiatis, G. Modelling of oil spills in confined maritime basins: The case for early response in the Eastern Mediterranean Sea. Environ. Pollut. 2015, 206, 390–399. [Google Scholar] [CrossRef] [PubMed]
- Alves, T.M.; Kokinou, E.; Zodiatis, G. Multidisciplinary oil spill modeling to protect coastal communities and the environment of the Eastern Mediterranean Sea. Sci. Rep. 2016, 6, 36882. [Google Scholar] [CrossRef] [PubMed]
- Kvenvolden, K.A.; Cooper, C.K. Natural seepage of crude oil into the marine environment. Geo-Mar. Lett. 2003, 3–4, 140–146. [Google Scholar] [CrossRef]
- Transportation Research Board and National Research Council. Oil in the Sea III: Inputs, Fates, and Effects; National Academies Press: Washington, DC, USA, 2003. [Google Scholar]
- DiGiacomo, P.M.; Washburn, L.; Holt, B. Coastal pollution hazards in southern California observed by SAR imagery: Stormwater plumes, wastewater plumes, and natural hydrocarbon seeps. Mar. Pollut. Bull. 2004, 11–12, 1013–1024. [Google Scholar] [CrossRef] [PubMed]
- Hu, C.; Li, X.; Pichel, W.G.; Muller-Karger, F.E. Detection of natural oil slicks in the NW Gulf of Mexico using MODIS imagery. Geophys. Res. Lett. 2009, 1, L01604. [Google Scholar] [CrossRef]
- Hühnerfuss, H. Basic physicochemical principles of monomolecular sea slicks and crude oil spills. In Marine Surface Films; Gade, M., Hühnerfuss, H., Korenowski, G.M., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 21–35. [Google Scholar]
- de Araújo Carvalho, G.; Minnett, P.J.; de Miranda, F.P.; Landau, L.; Paes, E.T. Exploratory data analysis of synthetic aperture radar (SAR) measurements to distinguish the sea surface expressions of naturally-occurring oil seeps from human-related oil spills in Campeche Bay (Gulf of Mexico). ISPRS Int. J. Geo-Inf. 2017, 12, 379. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 1, 9–23. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Pineda, O.; Holmes, J.; Rissing, M.; Jones, R.; Wobus, C.; Svejkovsky, J.; Hess, M. Detection of oil near shorelines during the Deepwater Horizon oil spill using synthetic aperture radar (SAR). Remote Sens. 2017, 6, 567. [Google Scholar] [CrossRef]
- Hu, J.; Ghamisi, P.; Schmitt, A.; Zhu, X.-X. Object based fusion of polarimetric SAR and hyperspectral imaging for land use classification. In Proceedings of the 8th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Los Angeles, CA, USA, 21–24 August 2016; pp. 1–5. [Google Scholar]
- Minchew, B.; Jones, C.E.; Holt, B. Polarimetric analysis of backscatter from the Deepwater Horizon oil spill using L-Band synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 2012, 10, 3812–3830. [Google Scholar] [CrossRef]
- Zhang, B.; Perrie, W.; Li, W.; Pichel, W.G. Mapping sea surface oil slicks using RADARSAT-2 quad-polarization SAR image. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Alpers, W.; Hühnerfuss, H. Radar signatures of oil films floating on the sea surface and the Marangoni effect. J. Geophys. Res. Oceans 1988, C4, 3642–3648. [Google Scholar] [CrossRef]
- Holt, B. SAR imaging of the ocean surface. In Synthetic Aperture Radar Marine User's Manual; Jackson, C.R., Apel, J.R., Eds.; Available online: http://www.sarusersmanual.com/ (accessed on 10 June 2018).
- Reddy, C.M. While oil gently seeps from the seafloor: Oil naturally leaking into the ocean offers a ‘laboratory’ to study accidental spills. Oceanus 2009, 3, 231–244. [Google Scholar]
- Delpeche-Ellmann, N.C.; Soomere, T. Investigating the Marine Protected Areas most at risk of current-driven pollution in the Gulf of Finland, the Baltic Sea, using a Lagrangian transport model. Mar. Pollut. Bull. 2013, 1–2, 121–129. [Google Scholar] [CrossRef] [PubMed]
- Lardner, R.; Zodiatis, G. Modelling oil plumes from subsurface spills. Mar. Pollut. Bull. 2017, 1, 94–101. [Google Scholar] [CrossRef] [PubMed]
- Skrunes, S.; Brekke, C.; Eltoft, T. Characterization of marine surface slicks by Radarsat-2 multipolarization features. IEEE Trans. Geosci. Remote Sens. 2014, 9, 5302–5319. [Google Scholar] [CrossRef]
- Nunziata, F.; Gambardella, A.; Migliaccio, M. On the degree of polarization for SAR sea oil slick observation. ISPRS J. Photogramm. Remote Sens. 2013, 4, 41–49. [Google Scholar] [CrossRef]
- Salberg, A.-B.; Rudjord, O.; Schistad Solberg, A.H. Oil spill detection in hybrid-polarimetric SAR images. IEEE Trans. Geosci. Remote Sens. 2014, 10, 6521–6533. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Y.; Chen, J.; Zhang, H. Improved compact polarimetric SAR quad-pol reconstruction algorithm for oil spill detection. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1139–1142. [Google Scholar] [CrossRef]
- Zatyagalova, V.V.; Ivanov, A.Y.; Golubov, B.N. Application of Envisat SAR imagery for mapping and estimation of natural oil seeps in the South Caspian Sea, 2007. In Proceedings of the ‘Envisat Symposium 2007’, Montreux, Switzerland, 23–27 April 2007. [Google Scholar]
- Guo, H.; Wu, D.; An, J. Discrimination of oil slicks and lookalikes in polarimetric SAR images using CNN. Sensors (Basel) 2017, 8, 1837. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Li, C.; Yang, Z.; Pichel, W. SAR imaging of ocean surface oil seep trajectories induced by near inertial oscillation. Remote Sens. Environ. 2013, 130, 182–187. [Google Scholar] [CrossRef]
- De Maio, A.; Orlando, D.; Pallotta, L.; Clemente, C. A Multifamily GLRT for Oil Spill Detection. IEEE Trans. Geosci. Remote Sens. 2017, 55, 63–79. [Google Scholar] [CrossRef]
- Pallotta, L.; Clemente, C.; De Maio, A.; Soraghan, J.J. Detecting Covariance Symmetries in Polarimetric SAR Images. IEEE Trans. Geosci. Remote Sens. 2017, 55, 80–95. [Google Scholar] [CrossRef]
- Migliaccio, M.; Gambardella, A.; Tranfaglia, M. SAR polarimetry to observe oil spills. IEEE Trans. Geosci. Remote Sens. 2007, 45, 506–511. [Google Scholar] [CrossRef]
- Tian, W.; Shao, Y.; Yuan, J.; Wang, S.; Liu, Y. An experiment for oil spill recognition using RADARSAT-2 image. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 2761–2764. [Google Scholar]
- Gade, M.; Alpers, W.; Hühnerfuss, H.; Masuko, H.; Kobayashi, T. Imaging of biogenic and anthropogenic ocean surface films by the multifrequency/multipolarization SIR-C/X-SAR. J. Geophys. Res. Oceans 1998, 103, 18851–18866. [Google Scholar] [CrossRef]
- Li, H.; Perrie, W.; He, Y.; Wu, J.; Luo, X. Analysis of the polarimetric SAR scattering properties of oil-covered waters. IEEE J.-Stars 2015, 8, 3751–3759. [Google Scholar] [CrossRef]
- Schuler, D.L.; Lee, J.S. Mapping ocean surface features using biogenic slick-fields and SAR polarimetric decomposition techniques. IEEE Proc. Radar Sonar Navig. 2006, 3, 260–270. [Google Scholar] [CrossRef]
- Garcia-Pineda, O.; Zimmer, B.; Howard, M.; Pichel, W.; Li, X.; MacDonald, I.R. Using SAR images to delineate ocean oil slicks with a texture-classifying neural network algorithm (TCNNA). Can. J. Remote Sens. 2009, 5, 411–421. [Google Scholar] [CrossRef]
- Jones, C.E.; Minchew, B.; Holt, B.; Hensley, S. Studies of the Deepwater Horizon oil spill with the UAVSAR radar. In Monitoring and Modeling the Deepwater Horizon Oil Spill: A Record-Breaking Enterprise, 1; Liu, Y., MacFadyen, A., Ji, Z.-G., Weisberg, R.H., Eds.; American Geophysical Union: Washington, DC, USA, 2013. [Google Scholar]
- Cloude, S.R.; Pottier, E. An entropy based classification scheme for land applications of polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 1997, 1, 68–78. [Google Scholar] [CrossRef]
- Haldar, D.; Patnaik, C.; Mohan, S. Jute and tea discrimination through fusion of SAR and optical data. Prog. Electromagn. Res. B 2012, 39, 337–354. [Google Scholar] [CrossRef]
- Pope, K.O.; Rey-Benayas, J.M.; Paris, J.F. Radar remote sensing of forest and wetland ecosystems in the Central American tropics. Remote Sens. Environ. 1994, 2, 205–219. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 2, 498–518. [Google Scholar] [CrossRef]
- Lee, J.-S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Plant, W.J.; Keller, W.C.; Hayes, K.; Chatham, G. Normalized radar cross section of the sea for backscatter: 1. Mean levels. J. Geophys. Res. 2010, C9. [Google Scholar] [CrossRef]
- Raney, R.K.; Cahill, J.T.S.; Patterson, G.W.; Bussey, D.B.J. The m-chi decomposition of hybrid dual-polarimetric radar data with application to lunar craters. J. Geophys. Res. Planets 2012, E12. [Google Scholar] [CrossRef]
- Hapke, B.W.; Nelson, R.M.; Smythe, W.D. The opposition effect of the moon: The contribution of coherent backscatter. Science 1993, 5107, 509–511. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case/Sensor | Case 1 (RADARSAT-2) | Case 2 (RADARSAT-2) |
|---|---|---|
| Date | 8 May 2010 | 18 September 2009 |
| Time | 12:01 a.m. (UTC) | 10:49 a.m. (UTC) |
| Region | The Gulf of Mexico (26°48′ N, 92°02′ W) | The South China Sea (18°06′ N, 109°24′ E) |
| Mode/Product | Fine Quad-Pol mode SLC | Fine Quad-Pol mode SLC |
| Frequency | C-band (5.405 GHz) | C-band (5.405 GHz) |
| Incidence angle | 41.9–43.4° | 32.3–34.1° |
| Resolution (Rg × Az) | 5.2 × 7.6 (m) | 5.2 × 7.6 (m) |
| Pixel space (Rg × Az) | 4.7 × 5.1 (m) | 4.7 × 5.1 (m) |
| Polarization | HH, HV, VH, VV | HH, HV, VH, VV |
| Wind speed/wind direction | 6.5 m/s (167°) | 10 m/s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Li, Y.; Liu, B.; Hou, Y.; Fan, J. Analysis of Scattering Properties of Continuous Slow-Release Slicks on the Sea Surface Based on Polarimetric Synthetic Aperture Radar. ISPRS Int. J. Geo-Inf. 2018, 7, 237. https://doi.org/10.3390/ijgi7070237
Li G, Li Y, Liu B, Hou Y, Fan J. Analysis of Scattering Properties of Continuous Slow-Release Slicks on the Sea Surface Based on Polarimetric Synthetic Aperture Radar. ISPRS International Journal of Geo-Information. 2018; 7(7):237. https://doi.org/10.3390/ijgi7070237
Chicago/Turabian StyleLi, Guannan, Ying Li, Bingxin Liu, Yongchao Hou, and Jianchao Fan. 2018. "Analysis of Scattering Properties of Continuous Slow-Release Slicks on the Sea Surface Based on Polarimetric Synthetic Aperture Radar" ISPRS International Journal of Geo-Information 7, no. 7: 237. https://doi.org/10.3390/ijgi7070237
APA StyleLi, G., Li, Y., Liu, B., Hou, Y., & Fan, J. (2018). Analysis of Scattering Properties of Continuous Slow-Release Slicks on the Sea Surface Based on Polarimetric Synthetic Aperture Radar. ISPRS International Journal of Geo-Information, 7(7), 237. https://doi.org/10.3390/ijgi7070237