A Moment-Based Shape Similarity Measurement for Areal Entities in Geographical Vector Data


Abstract
:1. Introduction
- We extend the calculation of geometric moments from images to vector polygons.
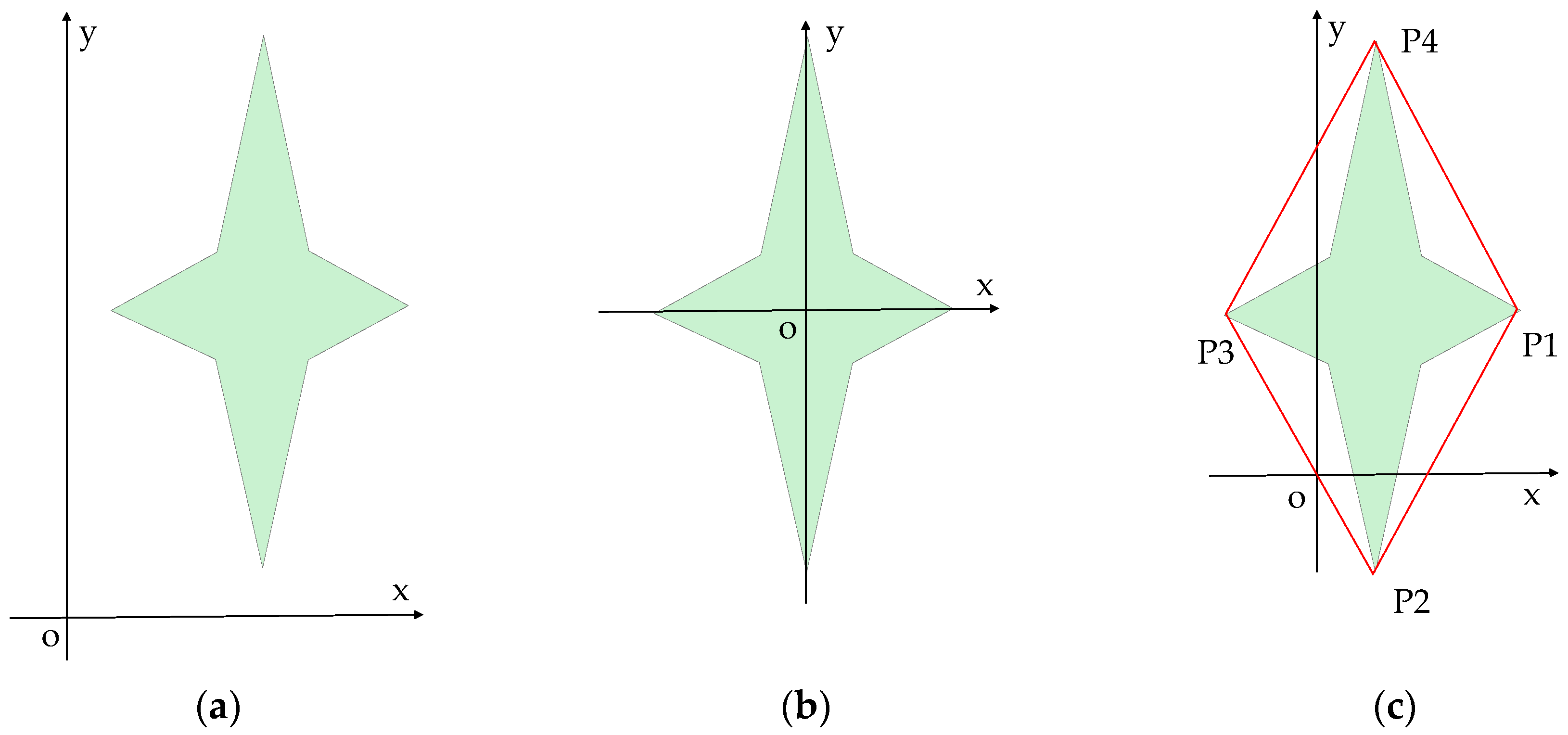
- Based on convex hull and moment invariants, we construct convex hull moment invariant curves to describe shapes and extract shape descriptors from the curves.
- We validate our method by experiments of invariance, similarity, and matching. Experimental results show that our shape descriptor is invariant to translation, rotation, and scaling. In addition, it takes advantage of moment invariants and convex hull and can be used for vector data matching.
2. Areal Entities in Geographical Vector Data
3. Moments and Moment Invariants
3.1. Hu Moment Invariants in Images
3.2. Moments for Vector Polygons
4. Shape Description Model for Areal Entities
4.1. Local Moment Invariants of Complex Polygons
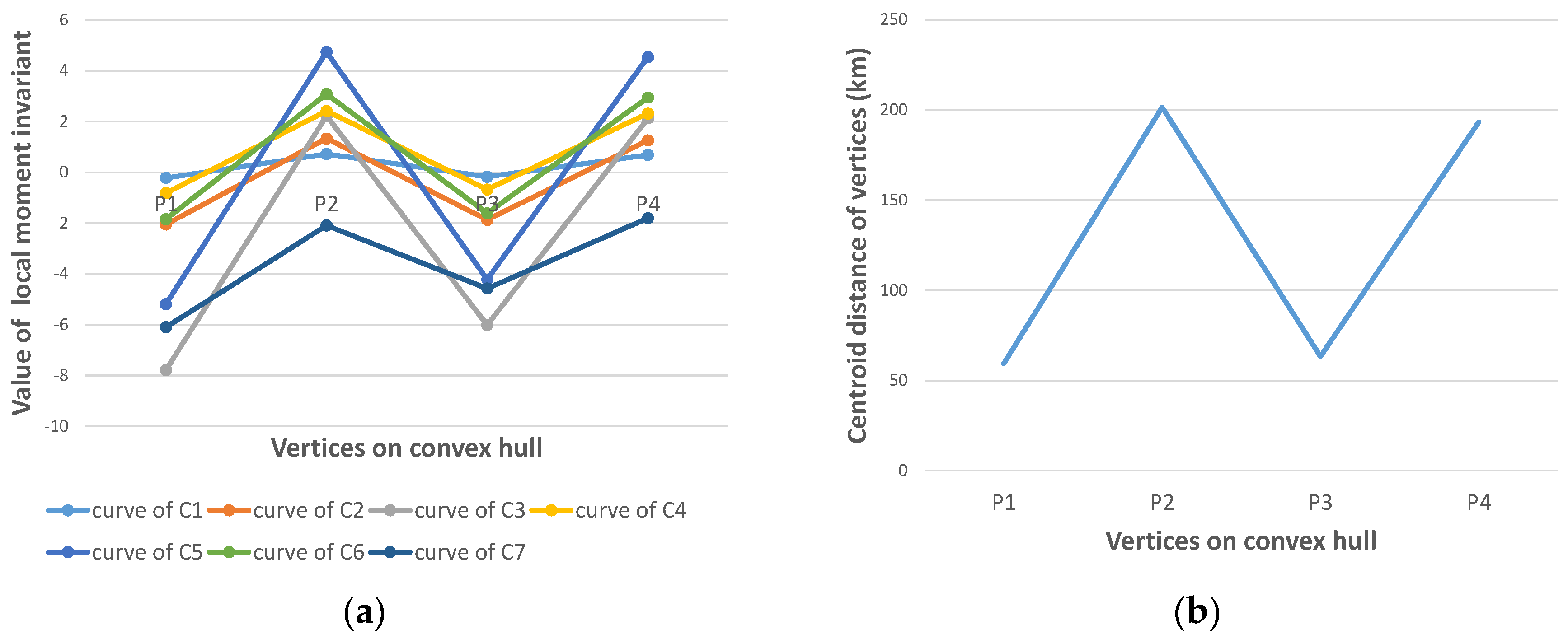
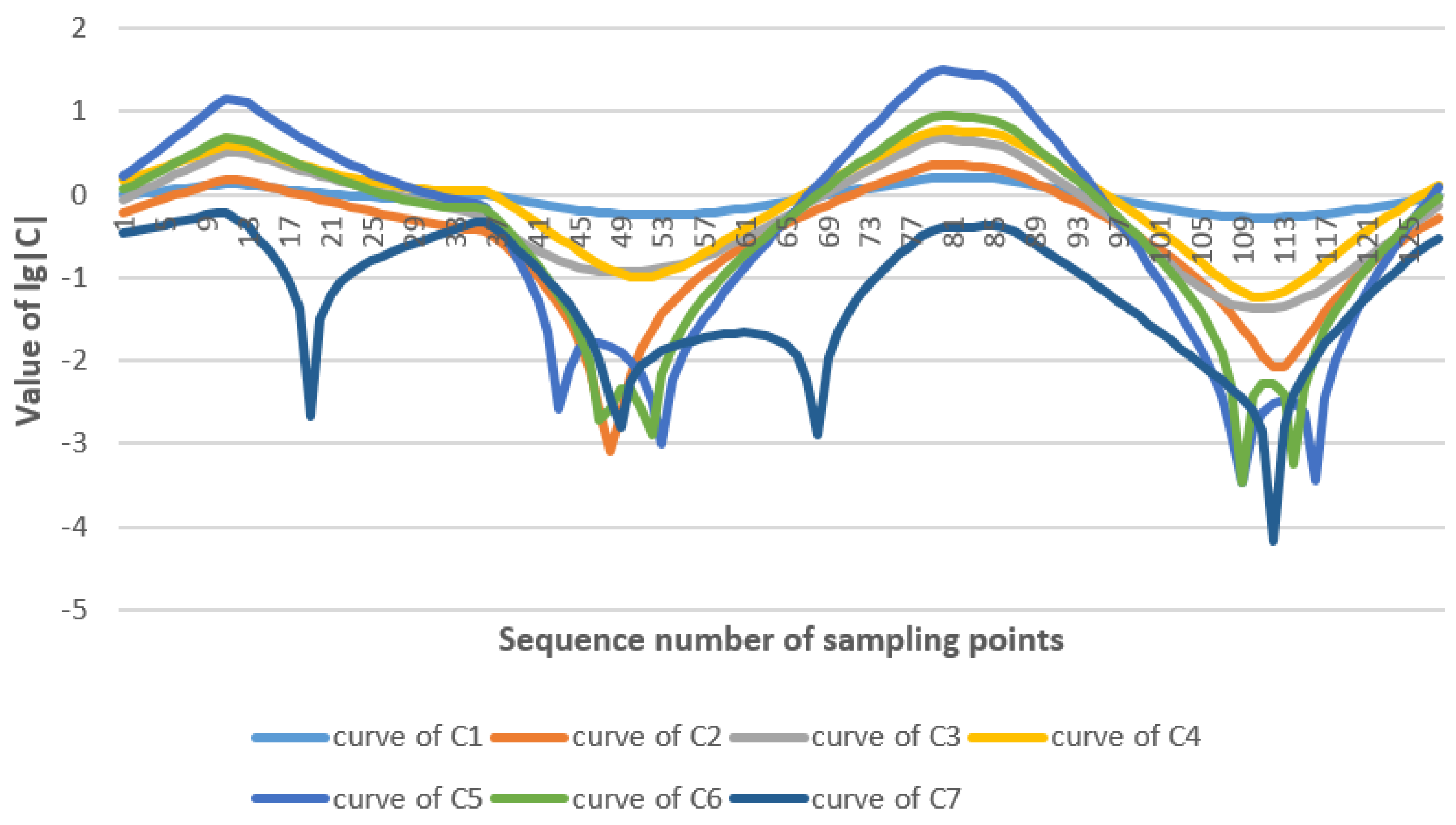
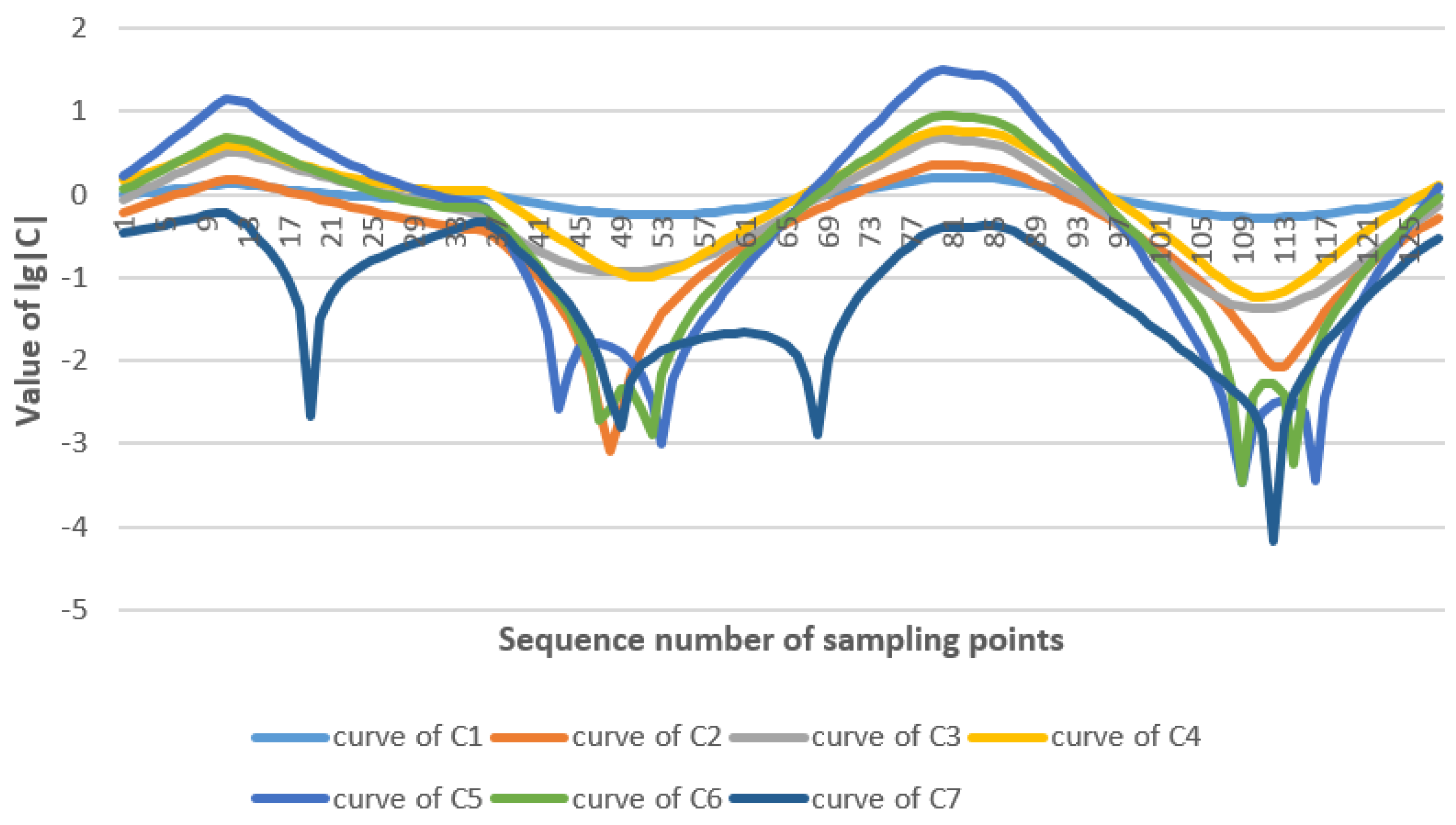
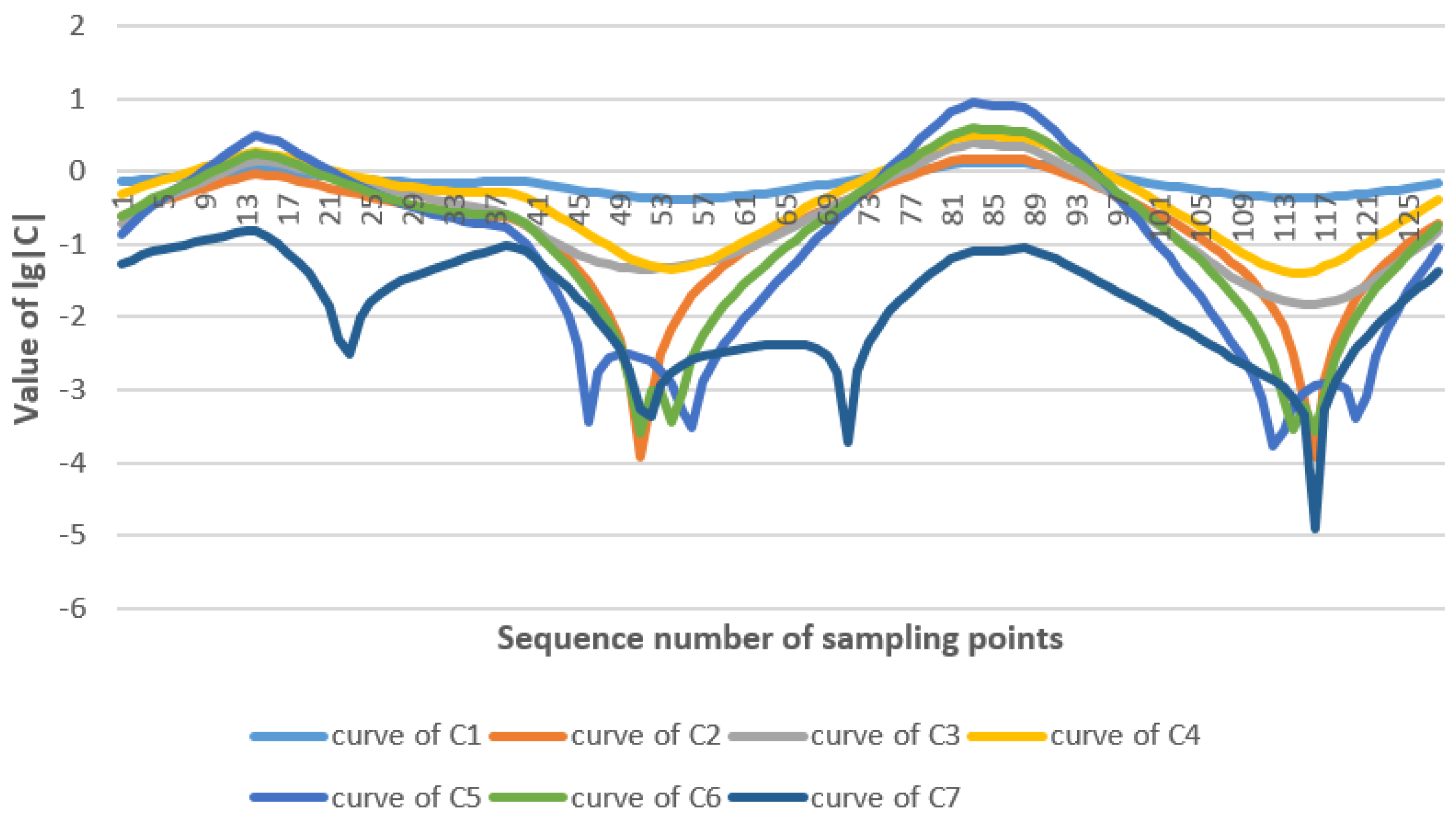
4.2. Convex Hull Moment Invariant Curves
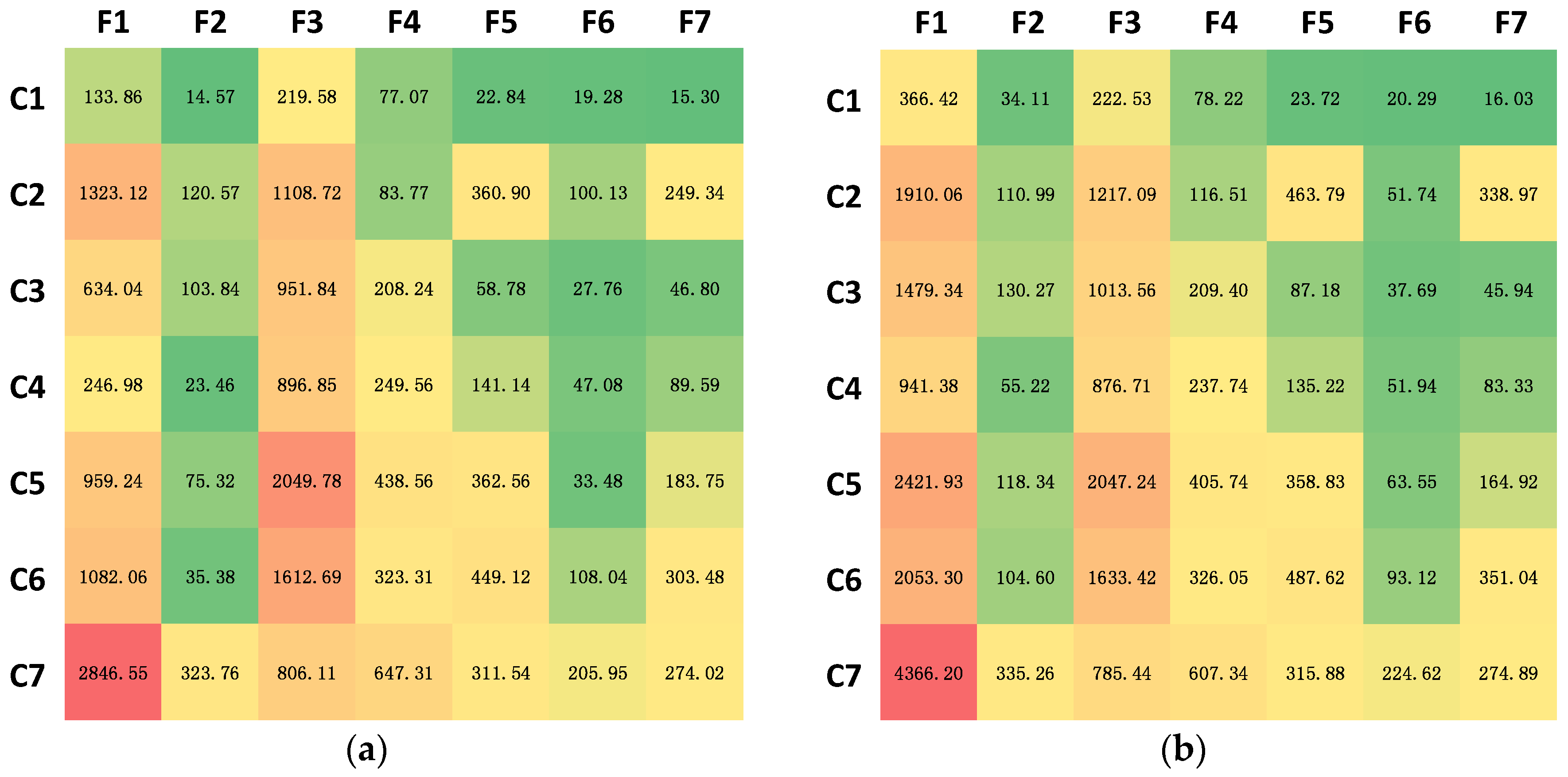
4.3. Feature Similarity Calculation
5. Experiments and Discussion
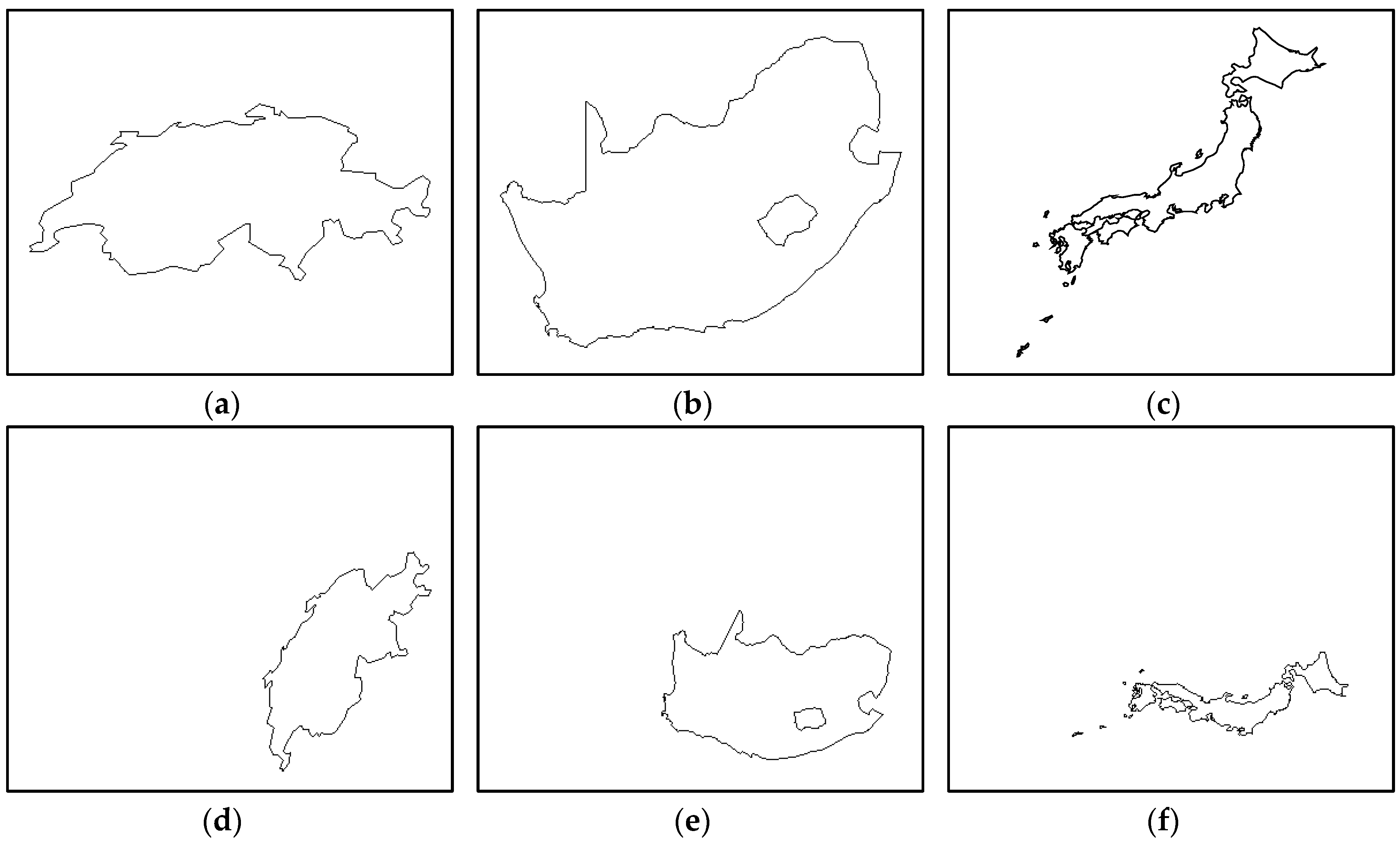
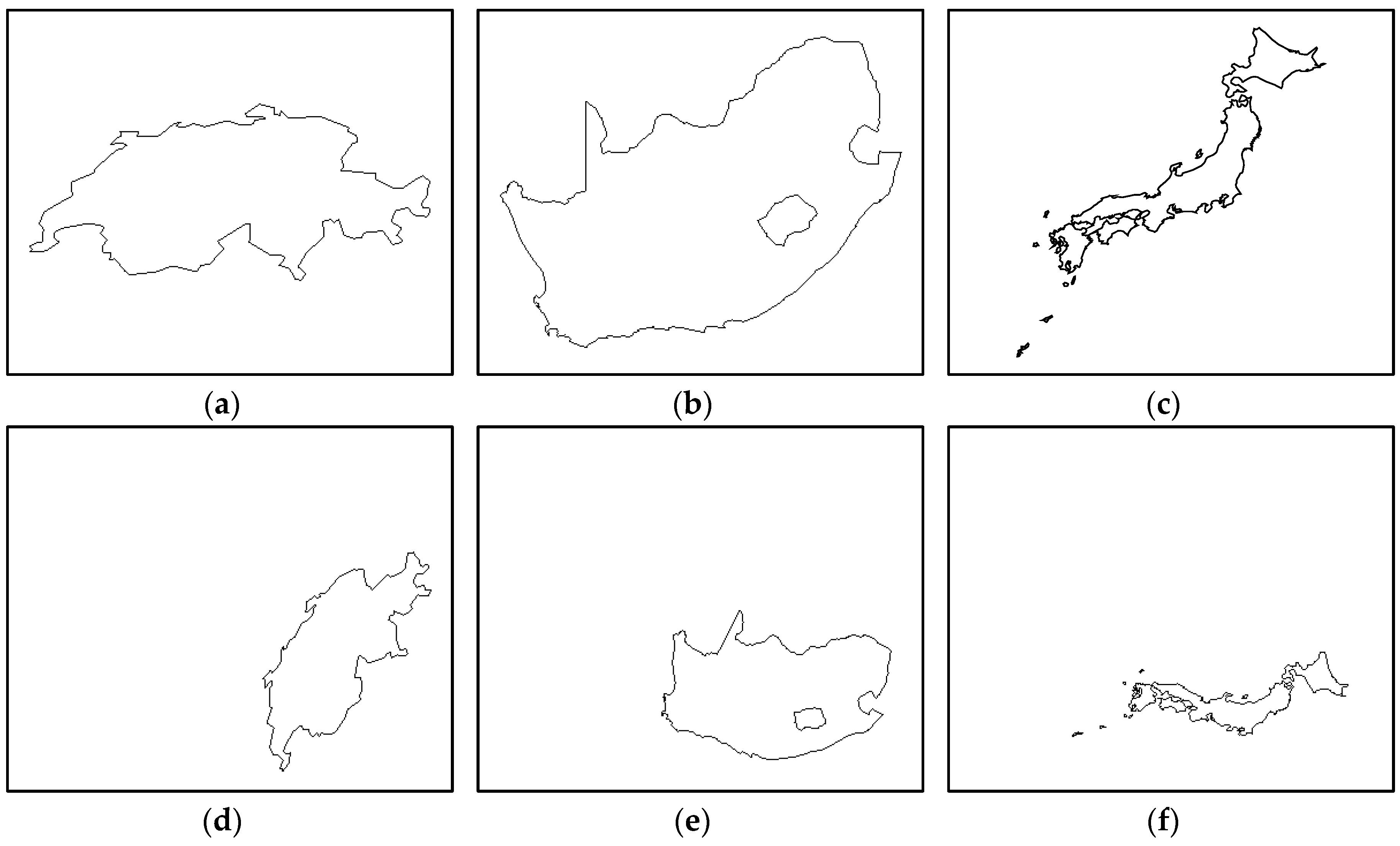
5.1. Experiment of Invariance
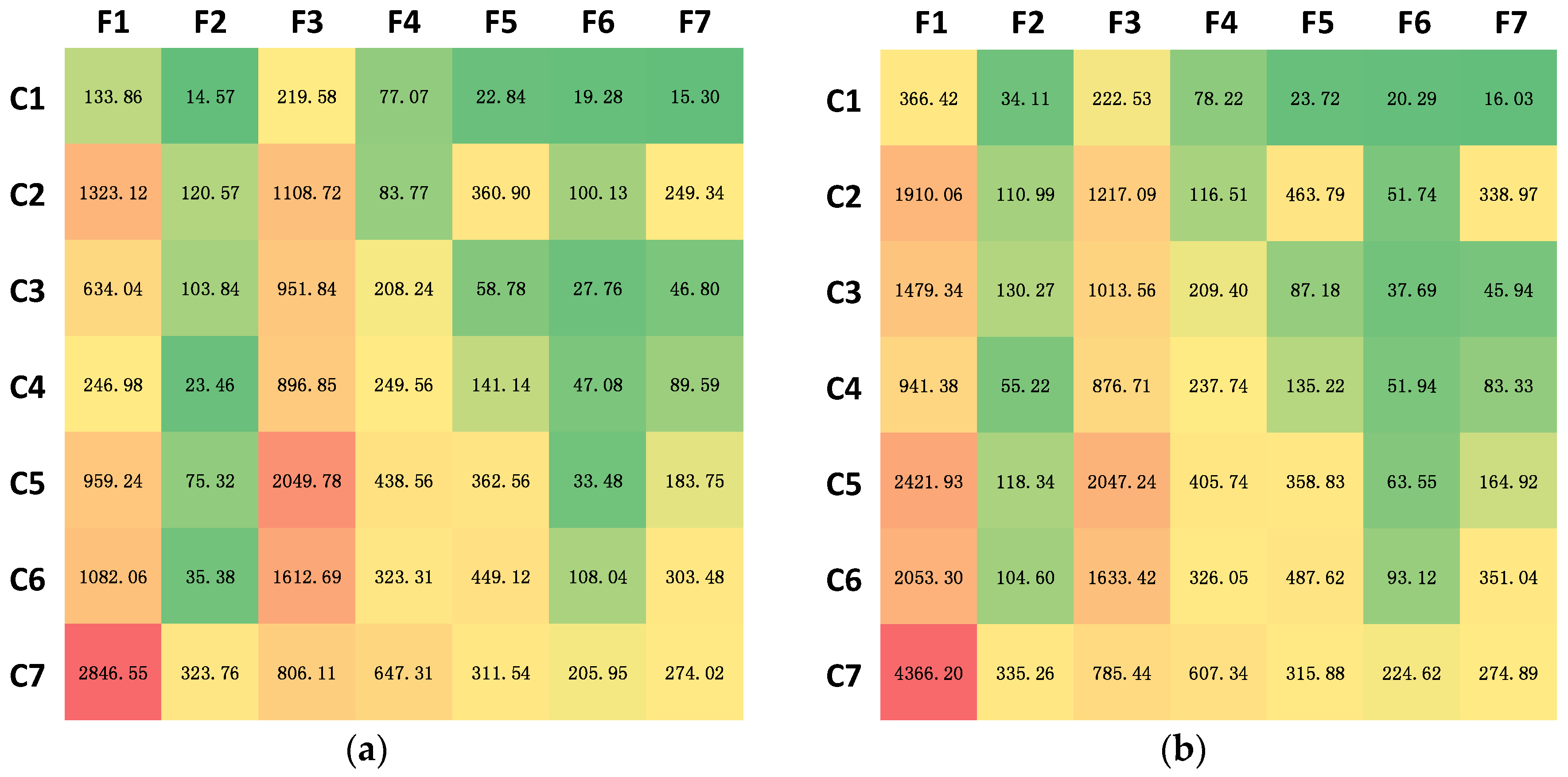
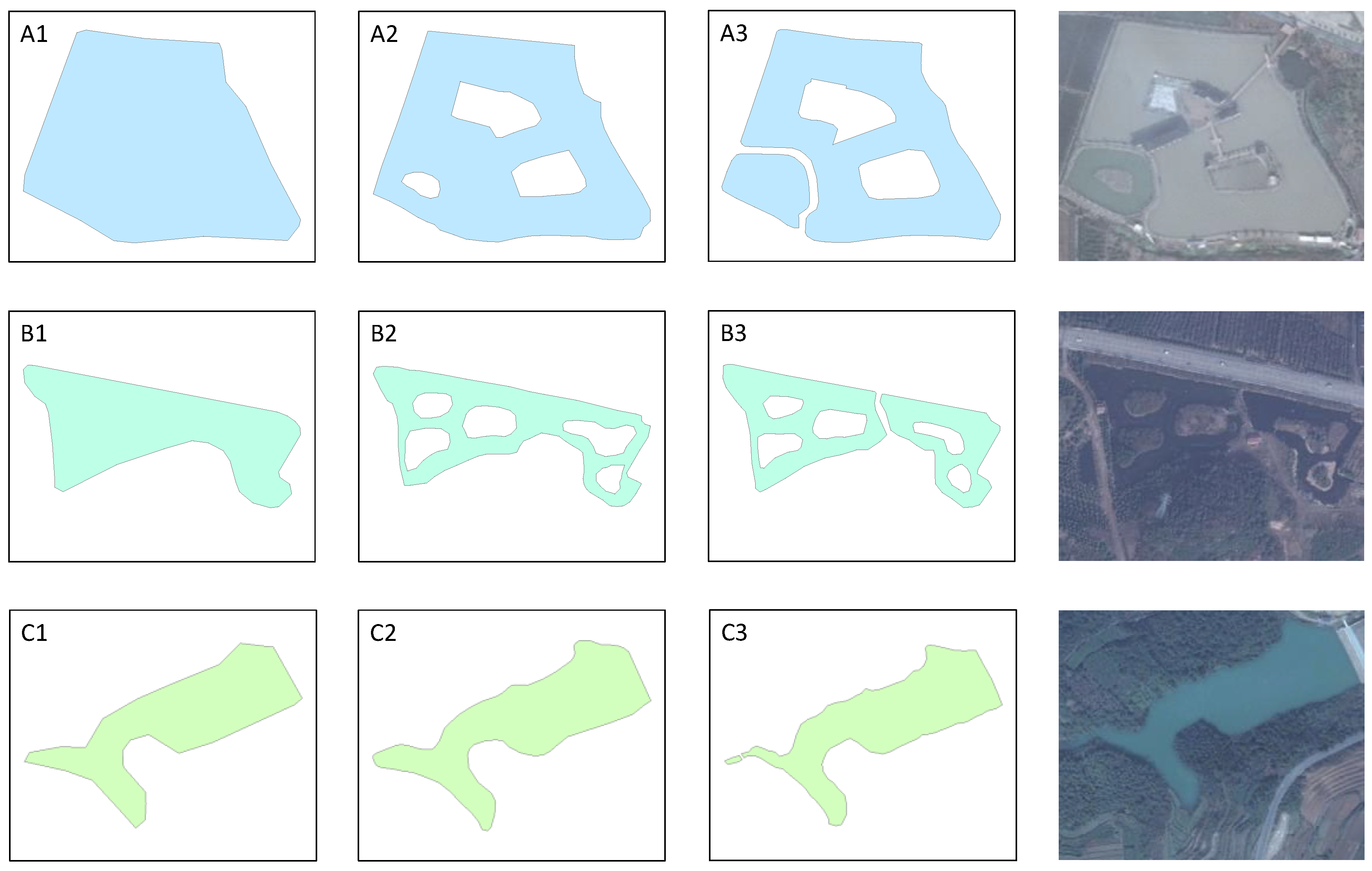
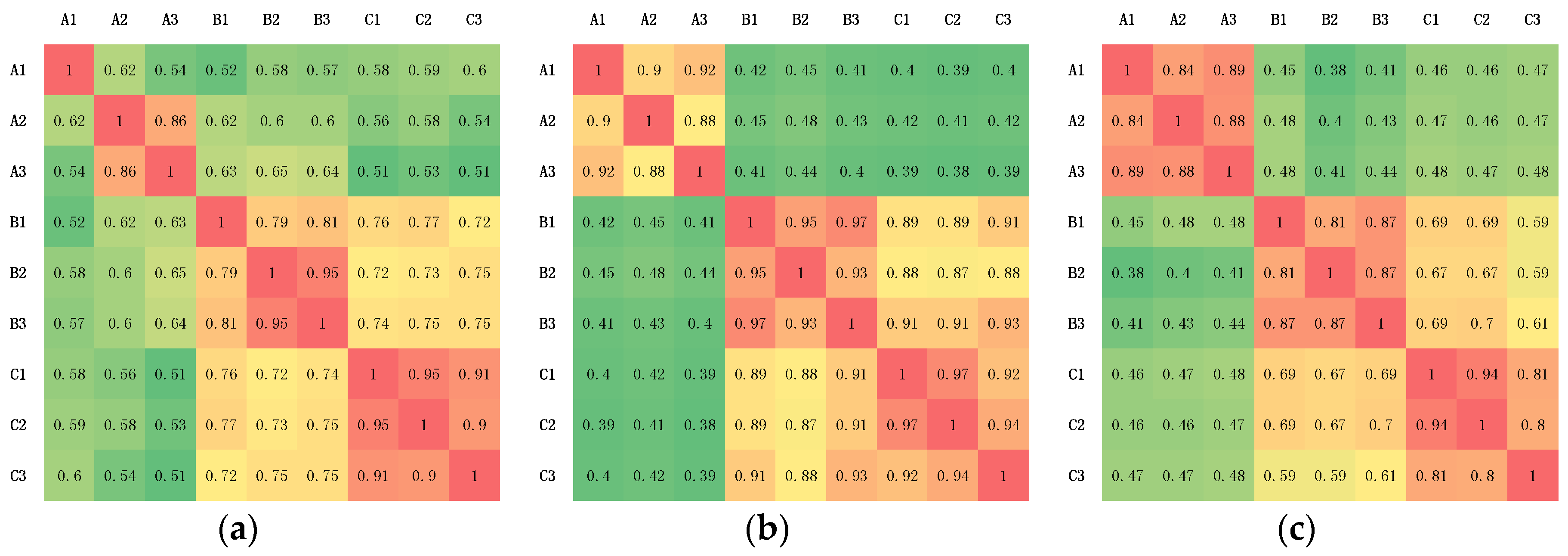
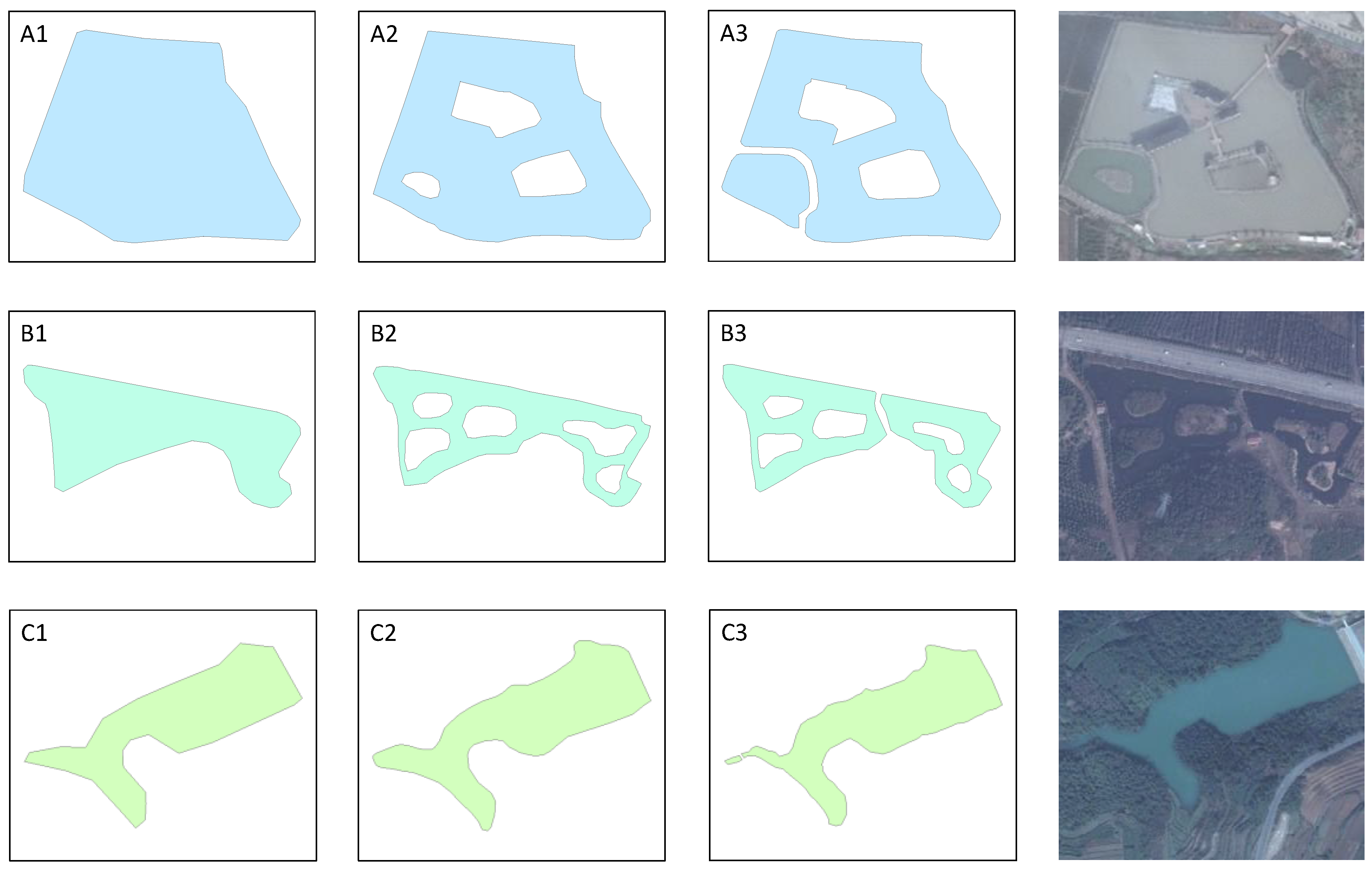
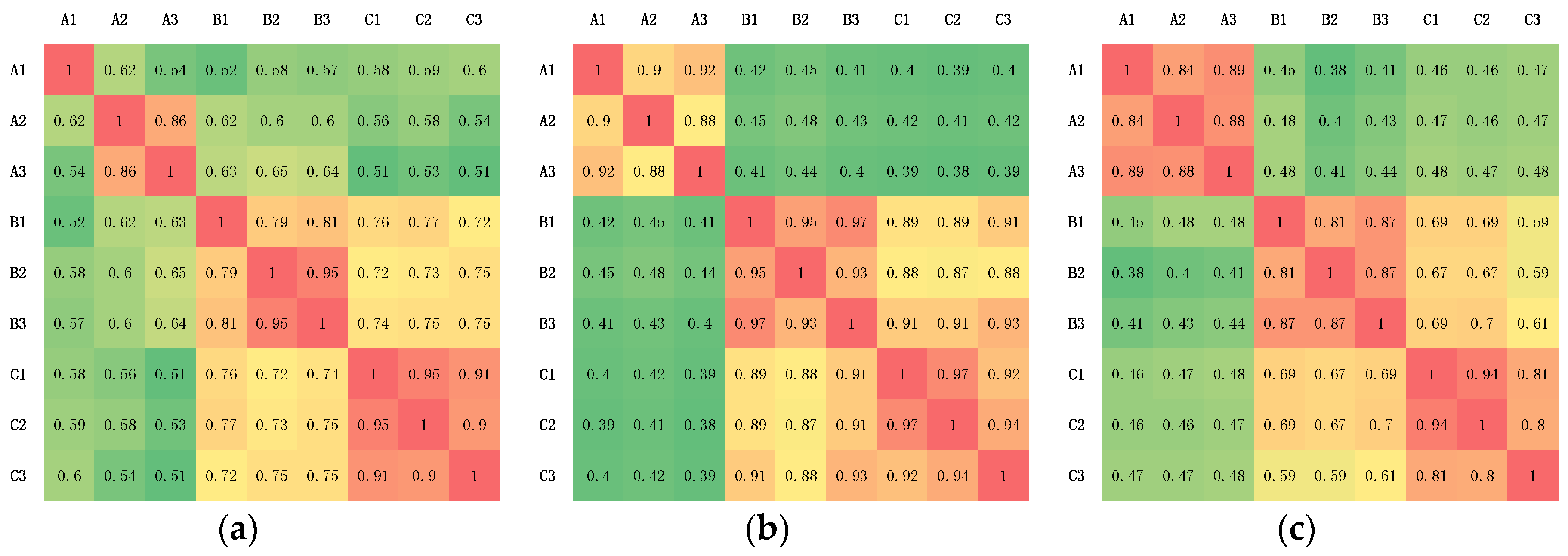
5.2. Experiment of Similarity
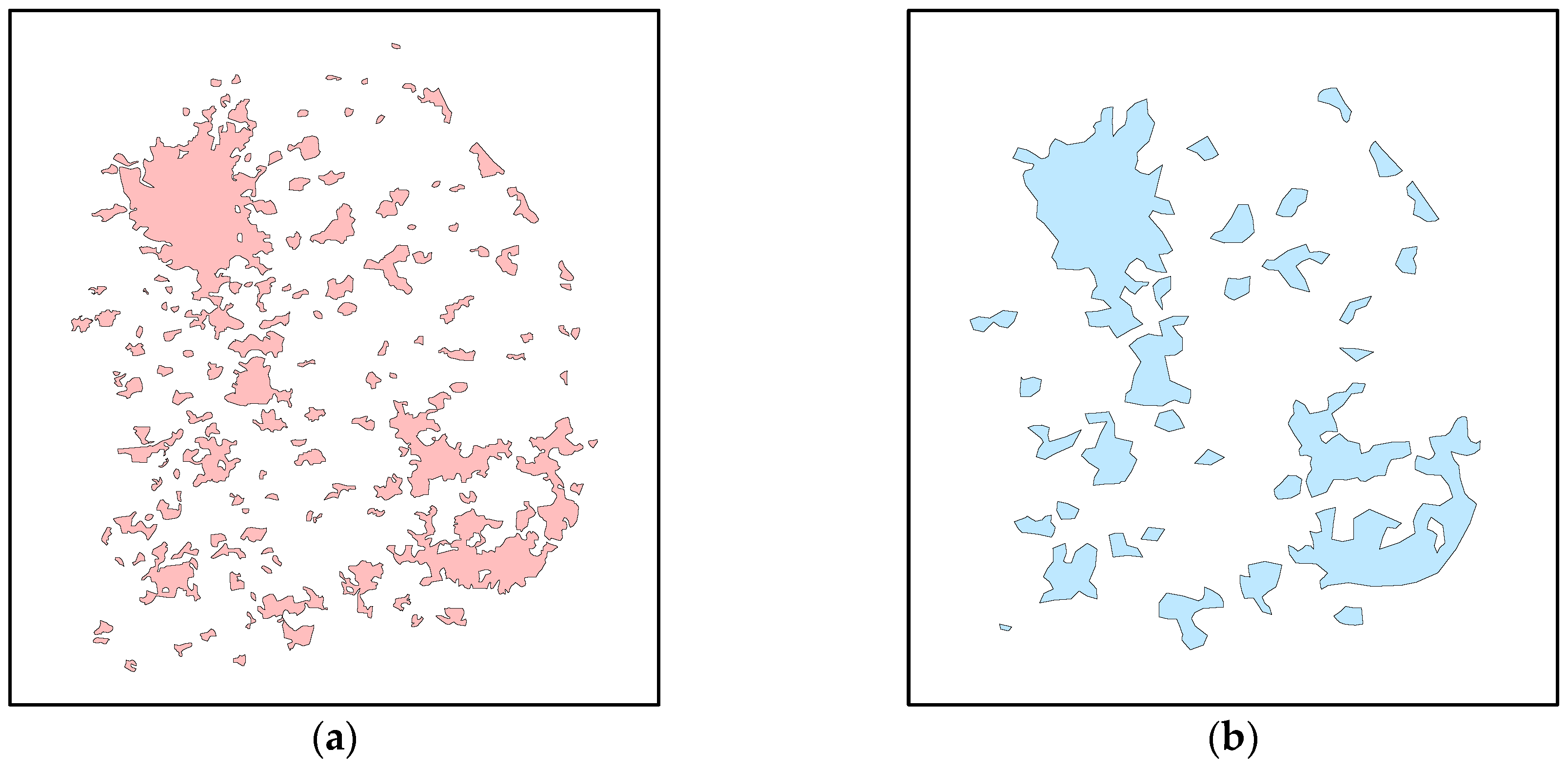
5.3. Experiment of Matching
6. Conclusions
Author Contributions
Conflicts of Interest
Appendix A
References
- Walter, V.; Fritsch, D. Matching spatial data sets: A statistical approach. Int. J. Geogr. Inf. Sci. 1999, 13, 445–473. [Google Scholar] [CrossRef]
- Cobb, M.A.; Chung, M.J.; Foley, H., III; Petry, F.E.; Shaw, K.B.; Miller, H.V. A rule-based approach for the conflation of attributed vector data. GeoInformatica 1998, 2, 7–35. [Google Scholar] [CrossRef]
- Saalfeld, A. Conflation automated map compilation. Int. J. Geogr. Inf. Syst. 1988, 2, 217–228. [Google Scholar] [CrossRef]
- Al-Bakri, M.; Fairbairn, D. Assessing similarity matching for possible integration of feature classifications of geospatial data from official and informal sources. Int. J. Geogr. Inf. Sci. 2012, 26, 1437–1456. [Google Scholar] [CrossRef]
- Fan, H.; Zipf, A.; Fu, Q.; Neis, P. Quality assessment for building footprints data on Open Street Map. Int. J. Geogr. Inf. Sci. 2014, 28, 700–719. [Google Scholar] [CrossRef]
- Zhao, Y.J.; Zhou, X.G. Version similarity-based model for volunteers’ reputation of volunteered geographic information: A case study of polygon. Acta Geod. Cartogr. Sin. 2015, 44, 578–584. [Google Scholar]
- Koukoletsos, T.; Haklay, M.; Ellul, C. Assessing Data Completeness of VGI through an Automated Matching Procedure for Linear Data. Trans. Gis 2012, 16, 477–498. [Google Scholar] [CrossRef]
- Kim, J.O.; Yu, K.; Heo, J.; Lee, W.H. A new method for matching objects in two different geospatial datasets based on the geographic context. Comput. Geosci. 2010, 36, 1115–1122. [Google Scholar] [CrossRef]
- Zhang, Q.P.; Li, D.R.; Gong, J.Y. Map conflation. Bull. Surv. Mapp. 2001, 7, 6–8. [Google Scholar]
- Xavier, E.; Ariza-López, F.J.; Urena-Camara, M.A. A survey of measures and methods for matching geospatial vector datasets. ACM Comput. Surv. 2016, 49, 39. [Google Scholar] [CrossRef]
- Tang, W.; Hao, Y.; Zhao, Y.; Ning, L. Research on areal feature matching algorithm based on spatial similarity. In Proceedings of the Control and Decision Conference, Yantai, China, 2–4 July 2008; pp. 3326–3330. [Google Scholar]
- Yang, M.; Kpalma, K.; Ronsin, J. A Survey of Shape Feature Extraction Techniques. Pattern Recognit. 2010, 1, 43–90. [Google Scholar]
- Fu, Z.L.; Shao, S.W.; Tong, C.Y. Multi-scale area entity shape matching based on tangent space. Comput. Eng. 2010, 17, 74. [Google Scholar]
- An, X.; Sun, Q.; Xiao, Q.; Yan, W. A shape multilevel description method and application in measuring geometry similarity of multi-scale spatial data. Acta Geod. Cartogr. Sin. 2011, 40, 495–508. [Google Scholar]
- Chen, Z.; Qin, M.; Wu, L.; Xie, Z. Establishment of the comprehensive shape similarity model for complex polygon entity by using bending mutilevel chord complex function. Acta Geod. Cartogr. Sin. 2016, 45, 224–232. [Google Scholar]
- Belongie, S.; Malik, J.; Puzicha, J. Shape context: A new descriptor for shape matching and object recognition. Adv. Neural Inf. Process. Syst. 2000, 831–837. [Google Scholar]
- Zhang, D.; Lu, G. A Comparative Study on Shape Retrieval Using Fourier Descriptors with Different Shape Signatures. In Proceedings of the International Conference on Intelligent Multimedia and Distance Education (ICIMADE01), Fargo, ND, USA, 1–3 June 2001; pp. 1–9. [Google Scholar]
- Xu, Y.; Xie, Z.; Chen, Z.; Wu, L. Shape similarity measurement model for holed polygons based on position graphs and Fourier descriptors. Int. J. Geogr. Inf. Sci. 2017, 31, 253–279. [Google Scholar] [CrossRef]
- Schneider, M.; Behr, T. Topological relationships between complex spatial objects. ACM Trans. Datab. Syst. 2006, 31, 39–81. [Google Scholar] [CrossRef]
- Chen, Z.; Zhu, R.; Xie, Z.; Wu, L. Hierarchical Model for the Similarity Measurement of a Complex Holed-Region Entity Scene. ISPRS Int. J. Geo Inf. 2017, 6, 388. [Google Scholar] [CrossRef]
- Kim, W.Y.; Kim, Y.S. A region-based shape descriptor using Zernike moments. Signal Process. Image Commun. 2000, 16, 95–102. [Google Scholar] [CrossRef]
- Premaratne, P.; Premaratne, M. Image matching using moment invariants. Neurocomputing 2014, 137, 65–70. [Google Scholar] [CrossRef]
- Zhang, D.; Lu, G. Review of shape representation and description techniques. Pattern Recognit. 2004, 37, 1–19. [Google Scholar] [CrossRef]
- Chen, Z.; Feng, Q.; Wu, X. Representation model of topological relations between complex planar objects. Acta Geod. Cartogr. Sin. 2015, 44, 438–444. [Google Scholar]
- Clementini, E.; di Felice, P. A model for representing topological relationships between complex geometric features in spatial databases. Inf. Sci. 1996, 90, 121–136. [Google Scholar] [CrossRef]
- Ai, T.; Li, Z.; Liu, Y. Progressive Transmission of Vector Data Based on Changes Accumulation Model. Dev. Spat. Data Handl. 2005. [Google Scholar] [CrossRef]
- Lu, G.; Sajjanhar, A. Region-based shape representation and similarity measure suitable for content-based image retrieval. Multimed. Syst. 1999, 7, 165–174. [Google Scholar] [CrossRef]
- Kim, H.K.; Kim, J.D. Region-based shape descriptor invariant to rotation, scale and translation. Signal Process. Image Commun. 2000, 16, 87–93. [Google Scholar] [CrossRef]
- Karakasis, E.G.; Amanatiadis, A.; Gasteratos, A.; Chatzichristofis, S.A. Image moment invariants as local features for content based image retrieval using the Bag-of-Visual-Words model. Pattern Recognit. Lett. 2015, 55, 22–27. [Google Scholar] [CrossRef]
- Hu, M.K. Visual pattern recognition by moment invariants. IRE Trans. Inf. Theory 1962, 8, 179–187. [Google Scholar]
- Jiang, X.Y.; Bunke, H. Simple and fast computation of moments. Pattern Recognit. 1991, 24, 801–806. [Google Scholar] [CrossRef]
- Cai, H.; Zhu, F. Shape Matching Method Based on Convex Hull and Multiscale Integral Features under Affine Transformation. J. Comput. Aided Des. Comput. Gr. 2017, 29, 269–278. [Google Scholar]
- Zhao, D.B.; Tian, H.E.; Zhang, K. Shape Contour Description and Matching Method Based on Complex Moments. J. Sichuan Univ. 2011, 43, 109–115. (In Chinese) [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C1 | C2 | C3 | C4 | C5 | C6 | C7 | |
|---|---|---|---|---|---|---|---|
| a | 2.462 × 10−1 | 3.001 × 10−2 | 5.989 × 10−4 | 7.151 × 10−5 | −1.355 × 10−9 | −6.198 × 10−6 | 1.474 × 10−8 |
| b | 2.132 × 10−1 | 1.419 × 10−2 | 4.689 × 10−4 | 5.192 × 10−5 | 9.138 × 10−10 | −1.832 × 10−6 | −8.048 × 10−9 |
| c | 8.181 × 10−1 | 5.197 × 10−1 | 1.008 × 10−1 | 1.375 × 10−2 | −1.481 × 10−4 | −5.535 × 10−3 | 4.903 × 10−4 |
| d | 2.462 × 10−1 | 3.001 × 10−2 | 5.989 × 10−4 | 7.151 × 10−5 | −1.355 × 10−9 | −6.198 × 10−6 | 1.474 × 10−8 |
| e | 2.132 × 10−1 | 1.419 × 10−2 | 4.689 × 10−4 | 5.191 × 10−5 | 9.125 × 10−10 | −1.833 × 10−6 | −8.048 × 10−9 |
| f | 8.181 × 10−1 | 5.197 × 10−1 | 1.008 × 10−1 | 1.376 × 10−2 | −1.481 × 10−4 | −5.536 × 10−3 | 4.903 × 10−4 |
| C1F1 | C2F1 | C3F1 | C4F1 | C5F1 | C6F1 | C7F1 | C1F2 | C2F2 | C3F2 | C4F2 | C5F2 | C6F2 | C7F2 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| a | 9.89 × 101 | 6.36 × 101 | 9.17 × 101 | 1.20 × 102 | 2.13 × 102 | 1.16 × 102 | 2.27 × 10−2 | 2.44 × 100 | 2.63 × 100 | 3.11 × 100 | 5.93 × 100 | 1.46 × 101 | 7.08 × 100 | 2.31 × 100 |
| b | 8.32 × 101 | 3.39 × 101 | 3.15 × 101 | 5.42 × 101 | 2.76 × 101 | 3.37 × 101 | 1.78 × 10−1 | 3.48 × 100 | 1.79 × 100 | 4.10 × 10−1 | 3.62 × 100 | 1.92 × 100 | 2.35 × 100 | 6.25 × 10−1 |
| c | 3.52 × 102 | 1.15 × 103 | 7.69 × 103 | 8.27 × 103 | 1.85 × 106 | 4.14 × 104 | 1.20 × 103 | 8.91 × 101 | 6.53 × 102 | 5.31 × 103 | 5.60 × 103 | 1.72 × 106 | 3.38 × 104 | 1.52 × 103 |
| d | 9.89 × 101 | 6.36 × 101 | 9.17 × 101 | 1.20 × 102 | 2.14 × 102 | 1.16 × 102 | 2.40 × 10−2 | 2.44 × 100 | 2.63 × 100 | 3.09 × 100 | 5.92 × 100 | 1.46 × 101 | 7.07 × 100 | 2.31 × 100 |
| e | 8.32 × 101 | 3.39 × 101 | 3.15 × 101 | 5.42 × 101 | 2.76 × 101 | 3.37 × 101 | 1.77 × 10−1 | 3.48 × 100 | 1.79 × 100 | 4.19 × 10−1 | 3.62 × 100 | 1.94 × 100 | 2.36 × 100 | 6.26 × 10−1 |
| f | 3.52 × 102 | 1.16 × 103 | 7.69 × 103 | 8.28 × 103 | 1.86 × 106 | 4.15 × 104 | 1.21 × 103 | 8.91 × 101 | 6.53 × 102 | 5.31 × 103 | 5.61 × 103 | 1.72 × 106 | 3.39 × 104 | 1.53 × 103 |
| Method Described in | Correct | Wrong | Unmatch | Precision | Recall | F1-Score |
|---|---|---|---|---|---|---|
| Tang et al. [11] | 21 | 1 | 11 | 95.45% | 65.63% | 77.78% |
| Ours | 30 | 1 | 2 | 96.77% | 93.75% | 95.24% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, Z.; Fan, L.; Yu, Z.; Zhou, K. A Moment-Based Shape Similarity Measurement for Areal Entities in Geographical Vector Data. ISPRS Int. J. Geo-Inf. 2018, 7, 208. https://doi.org/10.3390/ijgi7060208
Fu Z, Fan L, Yu Z, Zhou K. A Moment-Based Shape Similarity Measurement for Areal Entities in Geographical Vector Data. ISPRS International Journal of Geo-Information. 2018; 7(6):208. https://doi.org/10.3390/ijgi7060208
Chicago/Turabian StyleFu, Zhongliang, Liang Fan, Zhiqiang Yu, and Kaichun Zhou. 2018. "A Moment-Based Shape Similarity Measurement for Areal Entities in Geographical Vector Data" ISPRS International Journal of Geo-Information 7, no. 6: 208. https://doi.org/10.3390/ijgi7060208
APA StyleFu, Z., Fan, L., Yu, Z., & Zhou, K. (2018). A Moment-Based Shape Similarity Measurement for Areal Entities in Geographical Vector Data. ISPRS International Journal of Geo-Information, 7(6), 208. https://doi.org/10.3390/ijgi7060208