Real-Time Location-Based Rendering of Urban Underground Pipelines

 ,
,
Abstract
1. Introduction
1.1. Background
1.2. Related Work
1.3. Problems
1.4. Our Idea
2. System Design
2.1. Hardware Composition
2.2. Data Design
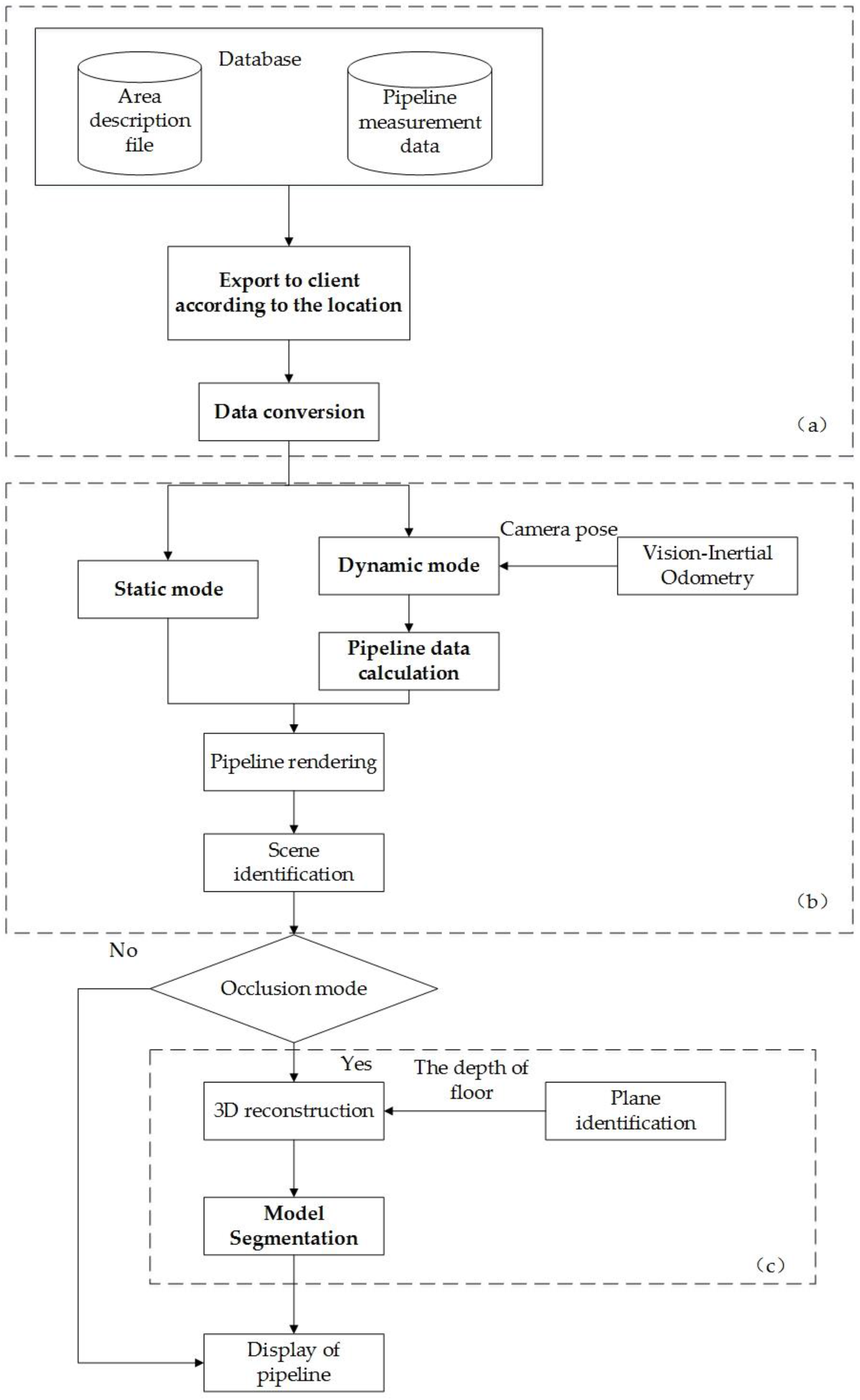
2.3. General Framework
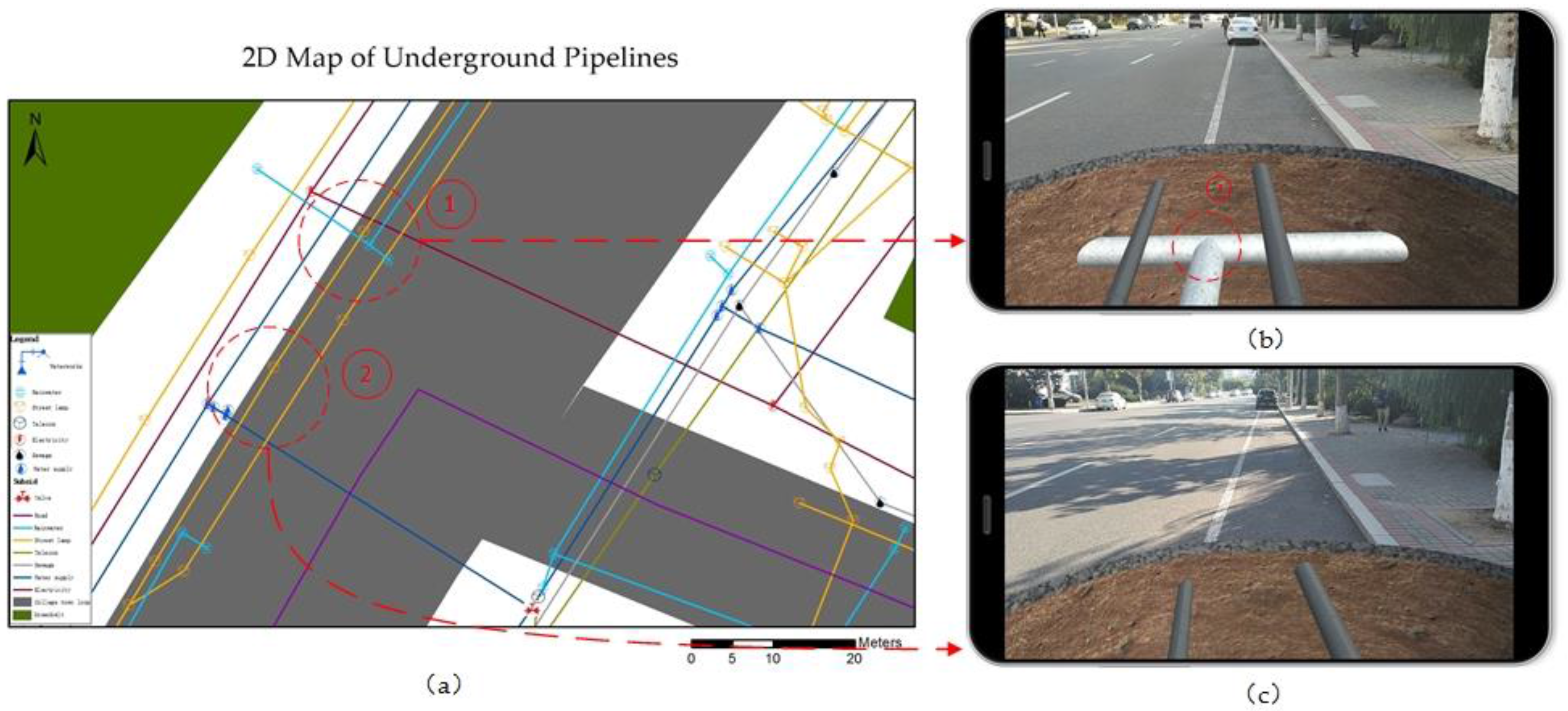
- The mobile device sends the final coordinates calculated from the differential corrections to our data server. According to the user’s location, the server transmits the pipeline data around the people and the corresponding ADF [27] to the mobile phone.
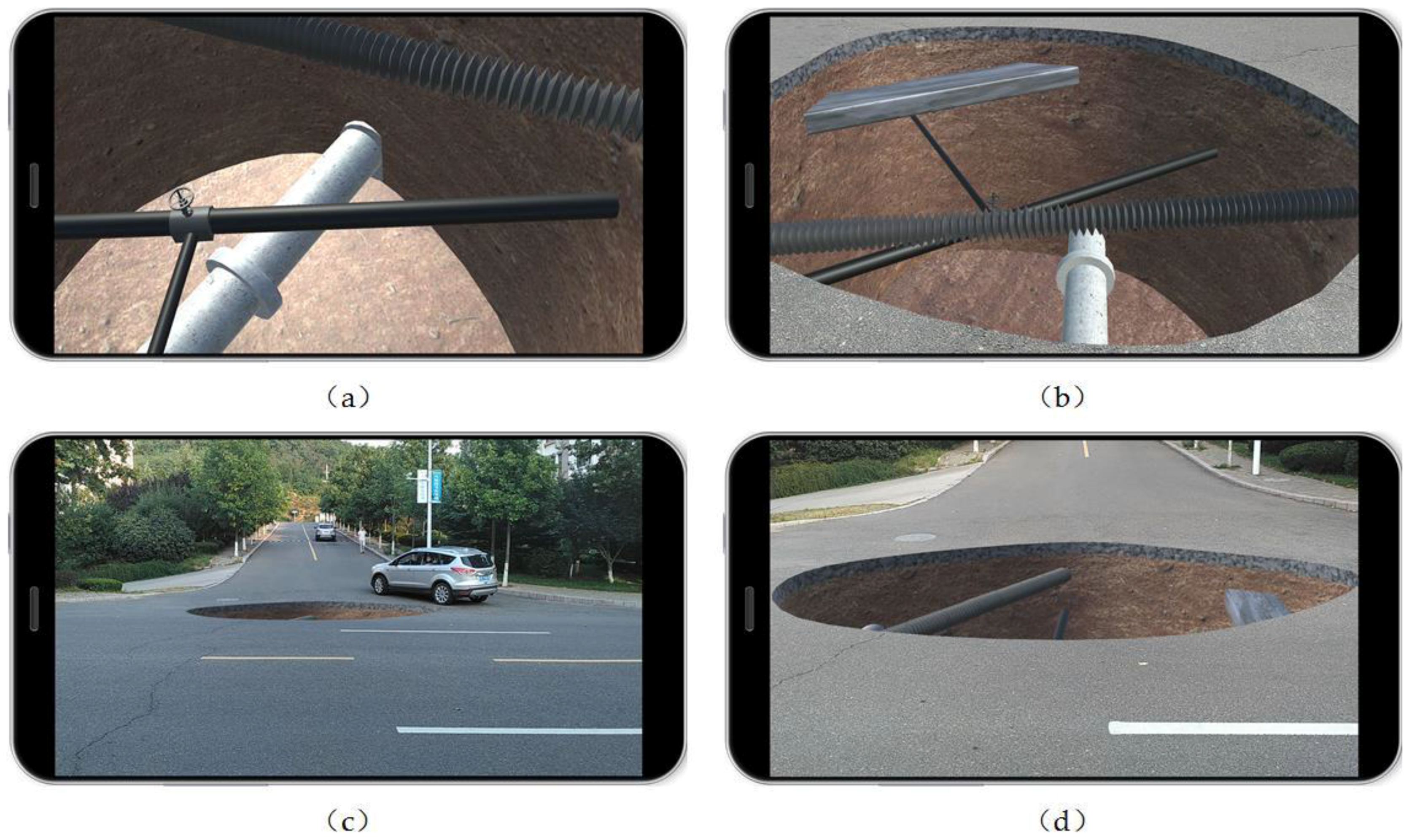
- The mobile phone transforms the latitude and longitude coordinates into the world coordinate data of Unity3D and draws the pipelines. Then it loads the ADF. After identifying the scene, it adjusts the pipeline position.
- In static mode, the mobile device achieves tracking of the model by calculating its own position using the VIO algorithm. In dynamic mode, we complete the dynamic rendering by the camera orientation and position output by the VIO.
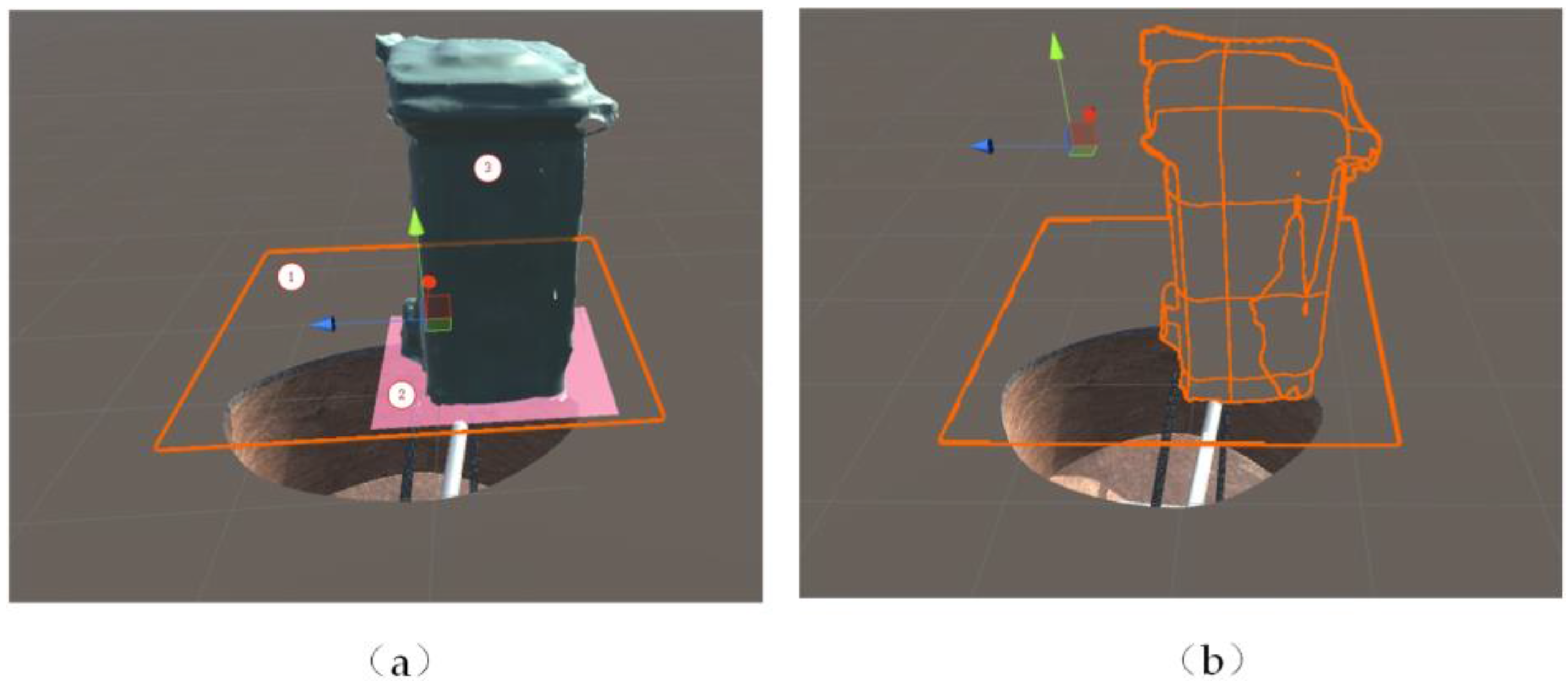
- According to the 6DOF of the device, the phone registers the point clouds obtained by the RGB-D sensor to complete the 3D reconstruction of the environment, and the mesh of the ground in the real world is split.
- The system attaches the 3D reconstruction rendered by the transparent occlusion texture to the pipeline model.
3. Methods
3.1. Pipeline Data Loading Based on High Accuracy Differential Positioning and Scene Identification Based on Visualization
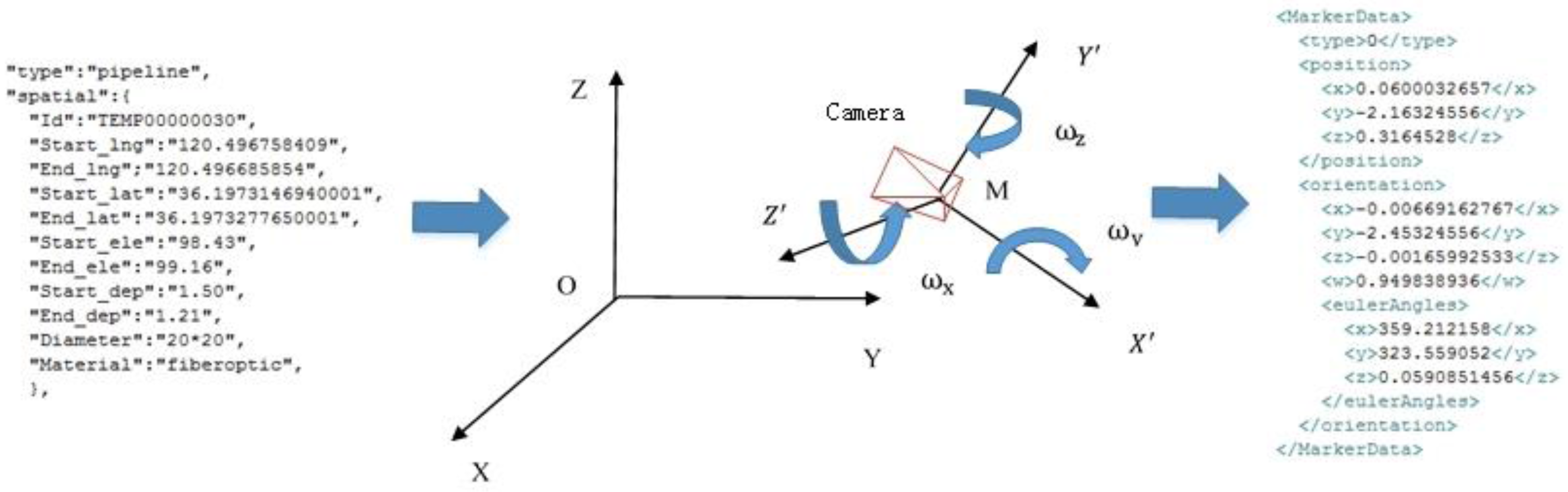
3.2. Spatial Conversion of the Pipeline Coordinates
3.3. Tracking Technology Based on VIO Algorithm
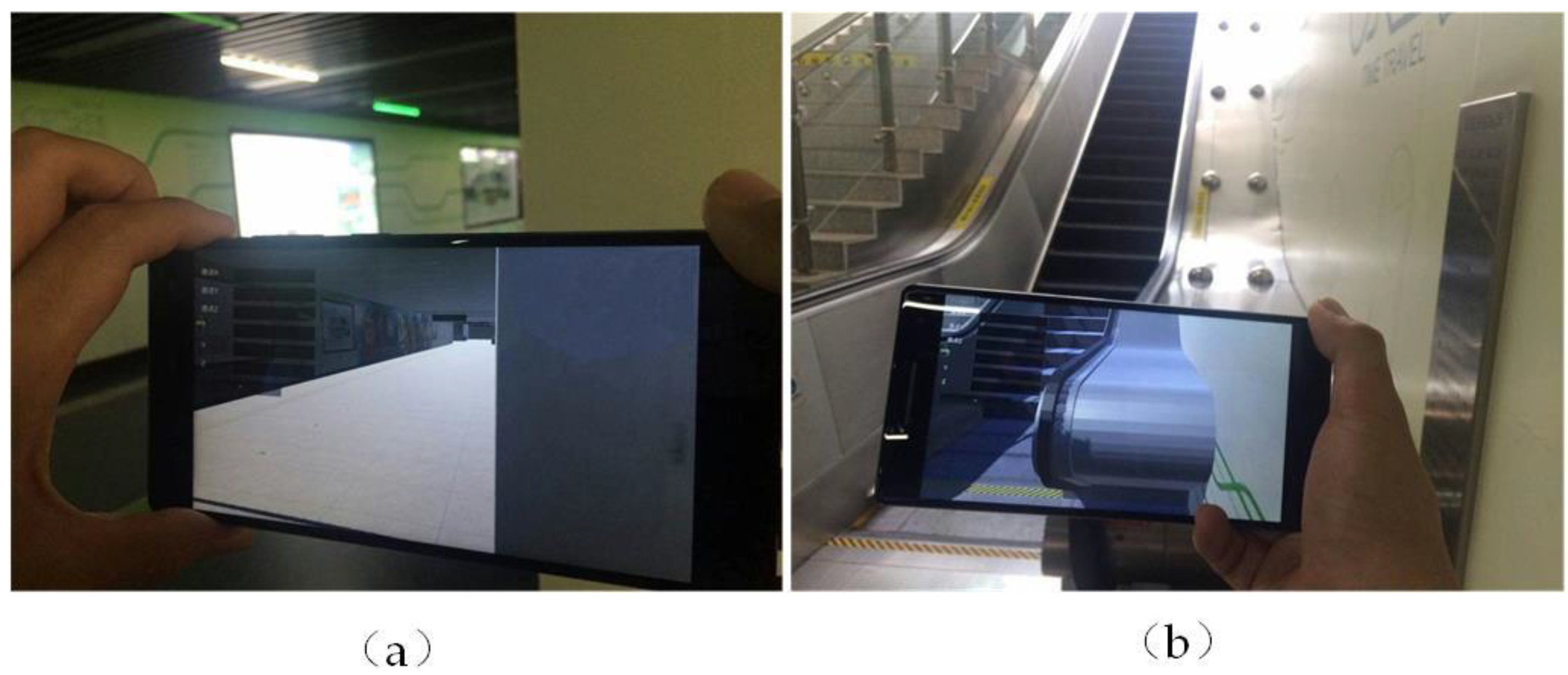
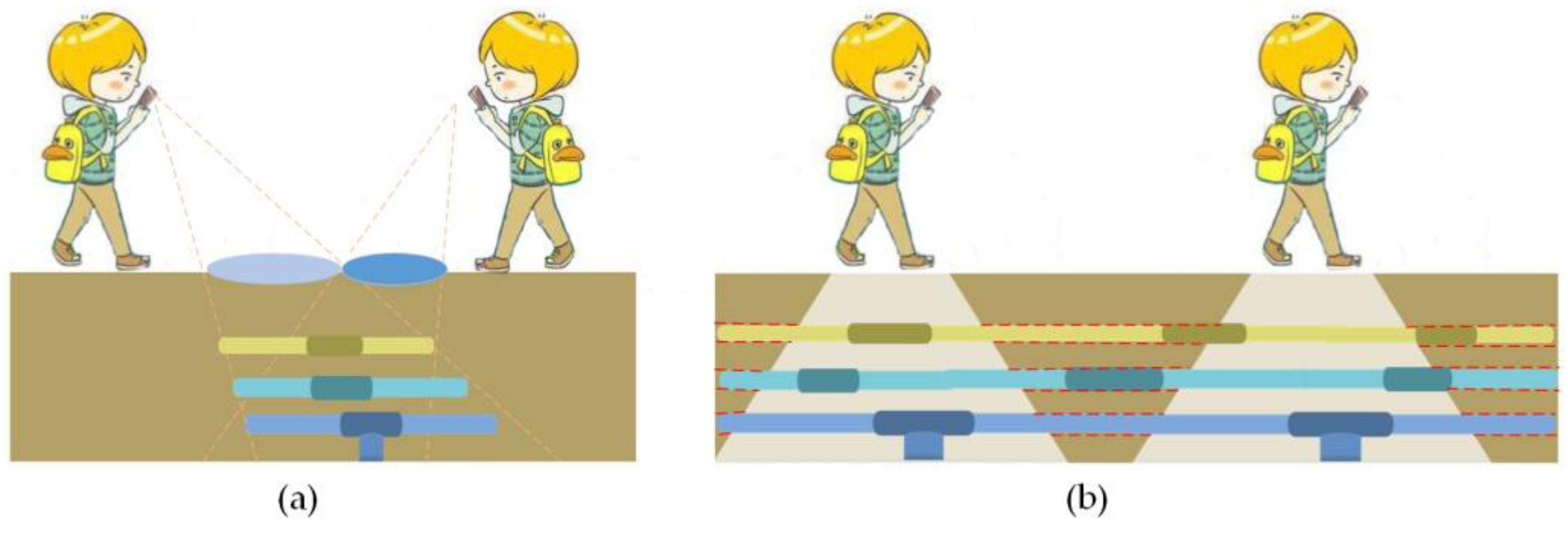
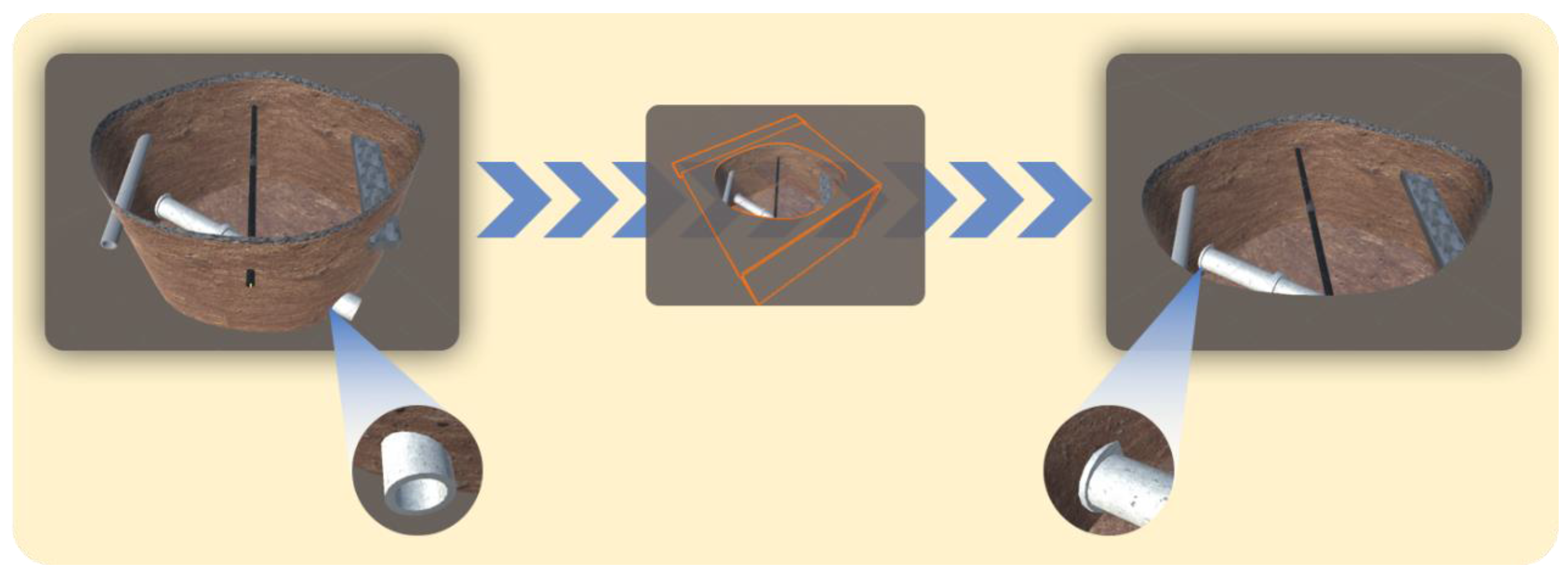
3.4. Pipeline Rendering Based on Occlusion
4. Experiments and Discussions
4.1. Spatial Accuracy
4.2. Tracking Accuracy
4.3. Occlusion Building
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shi, L.; Liu, Z.; Fu, J.; Yan, S. Research on the utility tunnel location technology based on ZigBee communication network. C e Ca 2017, 42, 167–171. [Google Scholar]
- Qingquan, L.I. Research on 3D Visualization of Underground Pipeline; Editorial Board of Geomatics & Information Science of Wuhan University: Wuhan, China, 2003. [Google Scholar]
- Lu, G. Geographic analysis-oriented Virtual Geographic Environment: Framework, structure and functions. Sci. China Earth Sci. 2011, 54, 733–743. [Google Scholar] [CrossRef]
- Lin, H.; Lu, G. Virtual Geographic Environment: A Workspace for Computer-Aided Geographic Experiments. Ann. Assoc. Am. Geogr. 2013, 103, 465–482. [Google Scholar] [CrossRef]
- Lv, Z.; Li, X.; Hu, J.; Yin, L.; Zhang, B.; Feng, S. Virtual geographic environment based coach passenger flow forecasting. In Proceedings of the IEEE International Conference on Computational Intelligence and Virtual Environments for Measurement Systems and Applications, Shenzhen, China, 12–14 June 2015; pp. 1–6. [Google Scholar]
- Che, W.; Lin, H.; Hu, M.; Lin, T. Reality-virtuality fusional avatar-based noise measurement and visualization in online virtual geographic environment. Ann. Gis 2014, 20, 109–115. [Google Scholar] [CrossRef]
- Hui, L.; Huang, F.; Xuejun, L.U.; Mingyuan, H.U.; Bingli, X.U. Preliminary study on virtual geographic environment cognition and representation. J. Remote Sens. 2010, 14, 822–838. [Google Scholar]
- Azuma, R.; Baillot, Y.; Behringer, R.; Feiner, S.; Julier, S.; MacIntyre, B. Recent Advances in Augmented Reality. IEEE Comput. Graph. 2001, 21, 34–47. [Google Scholar] [CrossRef]
- Feiner, S.; Macintyre, B.; Hollerer, T.; Webster, A. A Touring Machine: Prototyping 3D Mobile Augmented Reality Systems for Exploring the Urban Environment. Pers. Technol. 1997, 1, 208–217. [Google Scholar] [CrossRef]
- Sutherland, I.E. A head-mounted three dimensional display. In Proceedings of the Fall Joint Computer Conference, San Francisco, CA, USA, 9–11 December 1968; pp. 757–764. [Google Scholar]
- Roberts, G.W.; Evans, A.; Dodson, A. The Use of Augmented Reality, GPS and INS for Subsurface Data Visualisation. In Proceedings of the FIG XXII International Congress, Washington, DC, USA, 19–26 April 2002; pp. 1–12. [Google Scholar]
- Schall, G.; Mendez, E.; Kruijff, E.; Veas, E.; Junghanns, S.; Reitinger, B.; Schmalstieg, D. Handheld Augmented Reality for underground infrastructure visualization. Pers. Ubiquitous Comput. 2009, 13, 281–291. [Google Scholar] [CrossRef]
- Schall, G.; Schöning, J.; Paelke, V.; Gartner, G. A survey on augmented maps and environments. Adv. Web-Based GIS Mapp. Serv. Appl. 2011, 9, 207. [Google Scholar]
- Yong, C.; Xue, L.M. Research on Constructing Outdoor Augmented Reality System Based on Improved ARToolKit. J. Syst. Simul. 2009, 21, 2273–2276. [Google Scholar]
- Wagner, D.; Schmalstieg, D. ARToolkit on PocketPC platform. In Proceedings of the 2003 IEEE International Augmented Reality Toolkit Workshop, Tokyo, Japan, 7 October 2003; pp. 14–15. [Google Scholar]
- Cushnan, D.; El Habbak, H. Developing AR Games for iOS and Android; Packt Publishing Ltd.: Birmingham, UK, 2013. [Google Scholar]
- Kato, H.; Billinghurst, M. Marker Tracking and HMD Calibration for a Video-Based Augmented Reality Conferencing System. In Proceedings of the IEEE and ACM International Workshop on Augmented Reality, San Francisco, CA, USA, 20–21 October 2002; p. 85. [Google Scholar]
- Siltanen, S. Theory and Applications of Marker Based Augmented Reality; VTT: Espoo, Finland, 2012; pp. 45–50. [Google Scholar]
- Amin, D.; Govilkar, S. Comparative Study of Augmented Reality Sdk’s. Int. J. Comput. Sci. Appl. 2015, 5, 11–26. [Google Scholar] [CrossRef]
- Davison, A.J. Real-Time Simultaneous Localisation and Mapping with a Single Camera. In Proceedings of the IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; p. 1403. [Google Scholar]
- Engel, J.; Schöps, T.; Cremers, D. LSD-SLAM: Large-Scale Direct Monocular SLAM; Springer International Publishing: Berlin, Germany, 2014; pp. 834–849. [Google Scholar]
- Durrant-Whyte, H.; Bailey, T. Simultaneous Localization and Mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Bailey, T.; DurrantWhyte, H. Simultaneous localisation and mapping (slam) part 2: State of the art. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-Time Single Camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef] [PubMed]
- Jones, E.S.; Soatto, S. Visual-inertial navigation, mapping and localization: A scalable real-time causal approach. Int. J. Robot. Res. 2011, 30, 407–430. [Google Scholar] [CrossRef]
- Leutenegger, S.; Lynen, S.; Bosse, M.; Siegwart, R.; Furgale, P. Keyframe-based visual-inertial odometry using nonlinear optimization. Int. J. Robot. Res. 2015, 34, 314–334. [Google Scholar] [CrossRef]
- Marder-Eppstein, E. Project Tango; ACM SIGGRAPH 2016 Real-Time Live: Anaheim, CA, USA, 2016; p. 40. [Google Scholar]
- Li, M.; Mourikis, A.I. High-precision, consistent EKF-based visual–inertial odometry. Int. J. Robot. Res. 2013, 32, 690–711. [Google Scholar] [CrossRef]
- Li, M.; Qu, L.; Zhao, Q.; Guo, J.; Su, X.; Li, X. Precise point positioning with the BeiDou navigation satellite system. Sensors 2014, 14, 927–943. [Google Scholar] [CrossRef] [PubMed]
- Klingensmith, M.; Dryanovski, I.; Srinivasa, S.; Xiao, J. Chisel: Real Time Large Scale 3D Reconstruction Onboard a Mobile Device using Spatially Hashed Signed Distance Fields. Robot. Sci. Syst. 2015, 4. [Google Scholar]
- Schops, T.; Sattler, T.; Hane, C.; Pollefeys, M. 3D Modeling on the Go: Interactive 3D Reconstruction of Large-Scale Scenes on Mobile Devices. In Proceedings of the International Conference on 3d Vision, Lyon, France, 19–22 October 2015; pp. 291–299. [Google Scholar]
- Jili, Y. Rigorous Formula for Direct Calculating Parameter in 3D Transformation. Bull. Surv. Mapp. 2006, 5, 57–60. [Google Scholar]
- Lee, J.; Jung, S.; Pullen, S. Enhancements of Long Term Ionospheric Anomaly Monitoring for the Ground-Based Augmentation System. Proc. Int. Tech. Meet. Inst. Navig. 2011, 8034, 930–941. [Google Scholar]
- Yunck, T.P.; Bertiger, W.I.; Lichten, S.M.; Mannucci, A.J.; Muellerschoen, R.J.; Wu, S.C. Robust Real-Time Wide-Area Differential GPS Navigation. U.S. Patent 5,828,336, 27 October 1998. [Google Scholar]
- Angeli, A.; Filliat, D.; Doncieux, S.; Meyer, J. Fast and Incremental Method for Loop-Closure Detection Using Bags of Visual Words. IEEE Trans. Robot. 2008, 24, 1027–1037. [Google Scholar] [CrossRef]
- Wang, L.; Shaojie, N.I.; Wang, F. Development and Application of GPS Ground-based Augmentation System. Gnss World China 2014, 39, 26–29. [Google Scholar]
- Salas, M.; Latif, Y.; Reid, I.D.; Montiel, J.M.M. Trajectory Alignment and Evaluation in SLAM: Horn’s Method vs Alignment on the Manifold. Available online: http://webdiis.unizar.es/~msalasg/docs/rss15.pdf (accessed on 18 January 2018).
- Scaramuzza, D.; Fraundorfer, F. Visual Odometry: Part I: The First 30 Years and Fundamentals. IEEE Robot. Autom. Mag. 2011, 18, 80–92. [Google Scholar] [CrossRef]
- Hesch, J.A.; Kottas, D.G.; Bowman, S.L.; Roumeliotis, S.I. Camera-IMU-based localization: Observability analysis and consistency improvement. Int. J. Robot. Res. 2014, 33, 182–201. [Google Scholar] [CrossRef]
- Newcombe, R.A.; Izadi, S.; Hilliges, O.; Molyneaux, D.; Kim, D.; Davison, A.J.; Kohi, P.; Shotton, J.; Hodges, S.; Fitzgibbon, A. KinectFusion: Real-time dense surface mapping and tracking. In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality, Basel, Switzerland, 26–29 October 2012; pp. 127–136. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field | Type | Mean |
|---|---|---|
| Id | int | Pipeline number |
| Start_lng | float | Start point longitude |
| End_lng | float | End point longitude |
| Start_lat | float | Start point latitude |
| End_lat | float | End point latitude |
| Start_ele | float | Start point elevation |
| End_ele | float | End point elevation |
| Start_dep | float | Start point depth |
| End_dep | float | End point depth |
| Diameter | float | Pipeline diameter |
| Material | varchar | Pipeline material |
| Method | Mean (m) | Standard Deviation (m) |
|---|---|---|
| RTD (BDS + GPS) | 0.613 | 0.054 |
| RTD + ADF | 0.127 | 0.074 |
| Time (min) | Translation (m) |
|---|---|
| 1 | 0.022 ± 0.013 |
| 5 | 0.044 ± 0.017 |
| 9 | 0.090 ± 0.021 |
| 13 | 0.123 ± 0.020 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Han, Y.; Liu, Y.; Zhu, C.; Ren, Y.; Wang, Y.; Chen, G. Real-Time Location-Based Rendering of Urban Underground Pipelines. ISPRS Int. J. Geo-Inf. 2018, 7, 32. https://doi.org/10.3390/ijgi7010032
Li W, Han Y, Liu Y, Zhu C, Ren Y, Wang Y, Chen G. Real-Time Location-Based Rendering of Urban Underground Pipelines. ISPRS International Journal of Geo-Information. 2018; 7(1):32. https://doi.org/10.3390/ijgi7010032
Chicago/Turabian StyleLi, Wei, Yong Han, Yu Liu, Chenrong Zhu, Yibin Ren, Yanjie Wang, and Ge Chen. 2018. "Real-Time Location-Based Rendering of Urban Underground Pipelines" ISPRS International Journal of Geo-Information 7, no. 1: 32. https://doi.org/10.3390/ijgi7010032
APA StyleLi, W., Han, Y., Liu, Y., Zhu, C., Ren, Y., Wang, Y., & Chen, G. (2018). Real-Time Location-Based Rendering of Urban Underground Pipelines. ISPRS International Journal of Geo-Information, 7(1), 32. https://doi.org/10.3390/ijgi7010032