
A Novel Semantic Matching Method for Indoor Trajectory Tracking

Abstract
:1. Introduction
2. Related Work
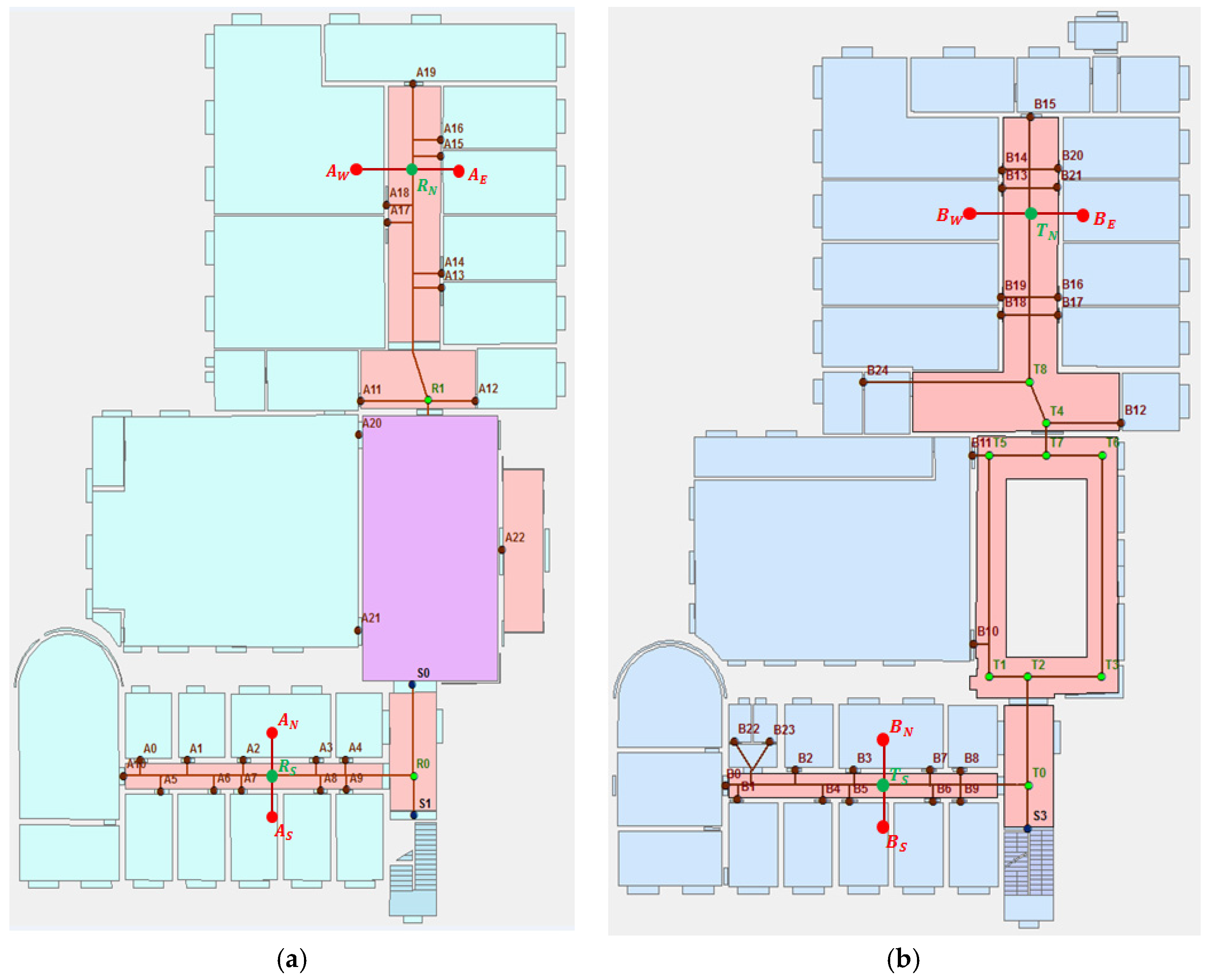
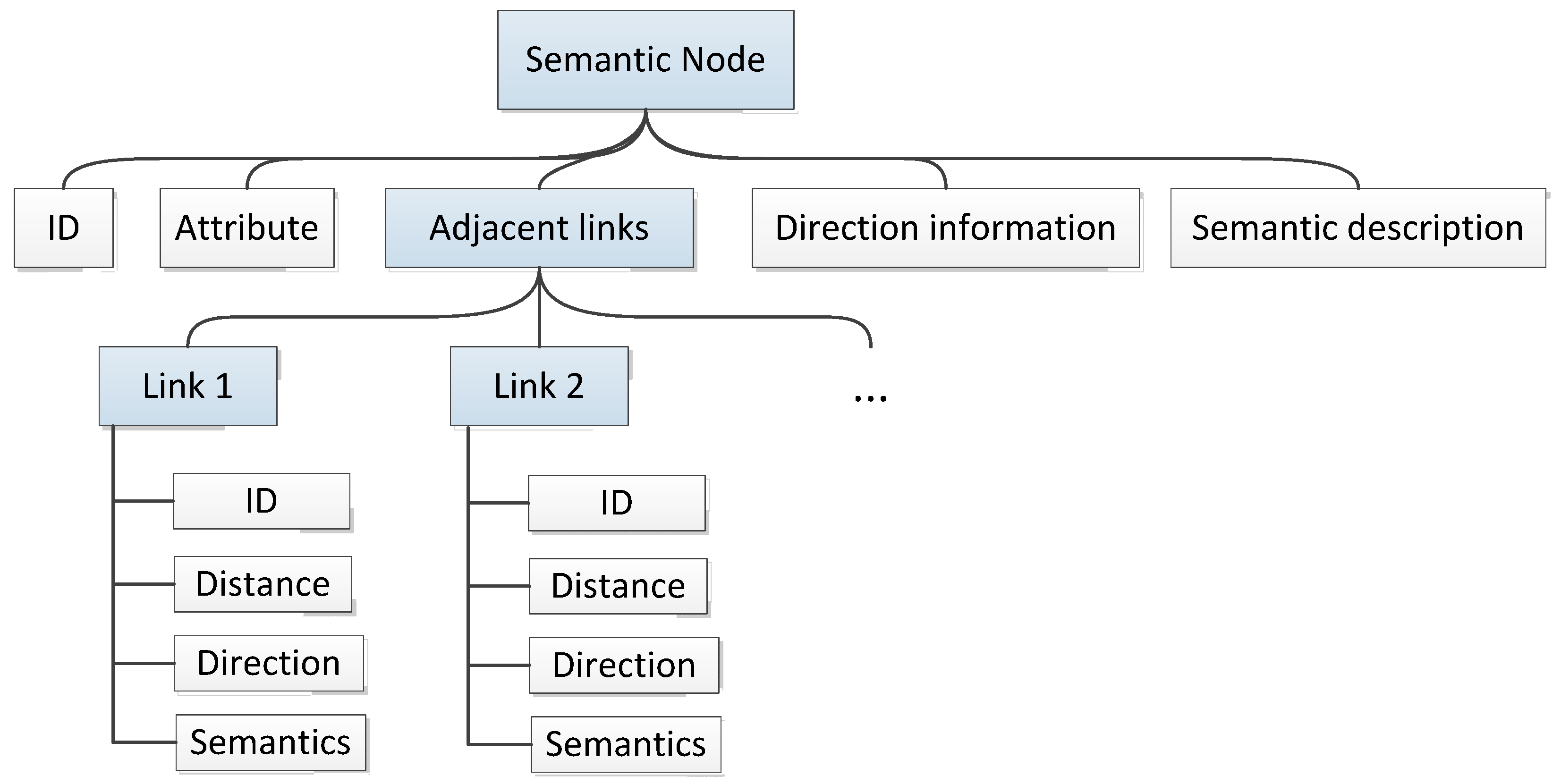
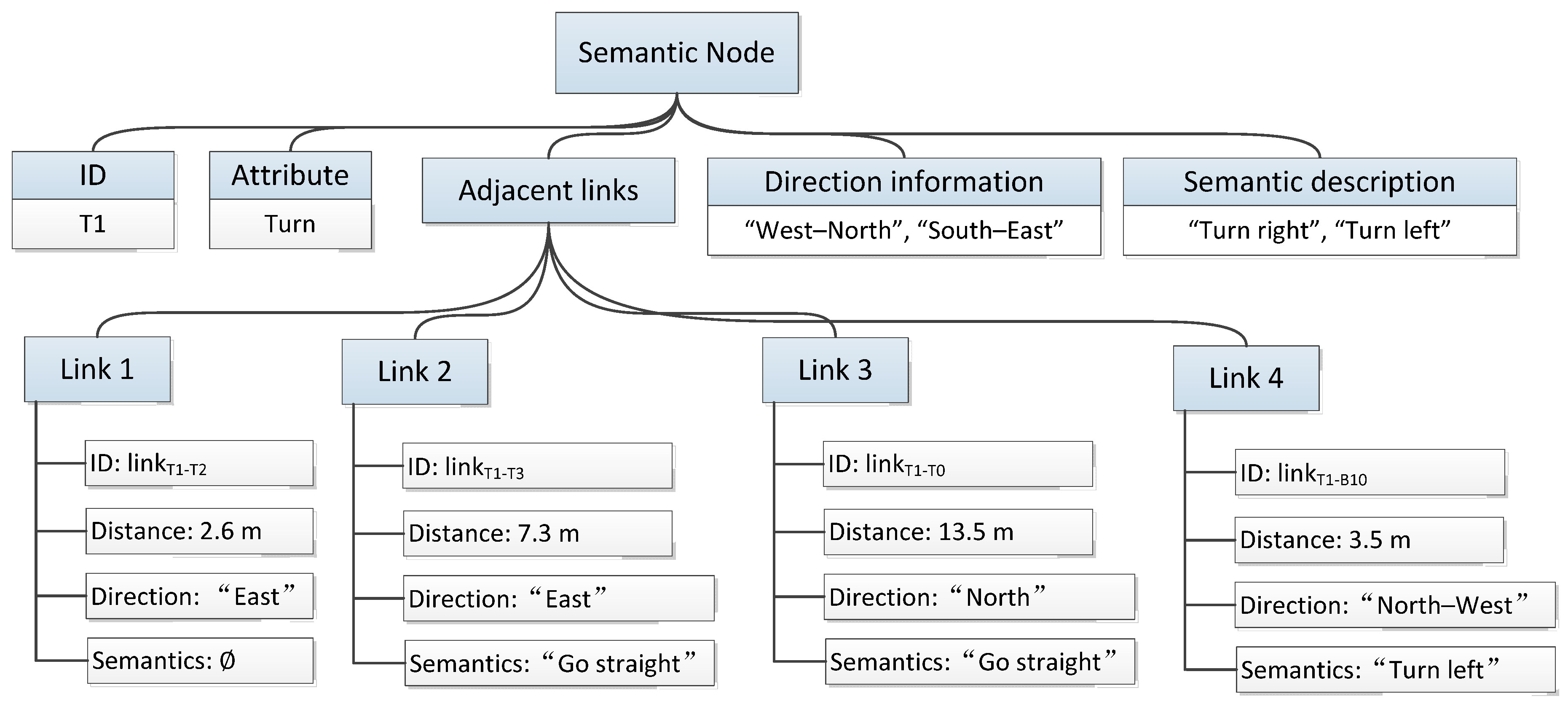
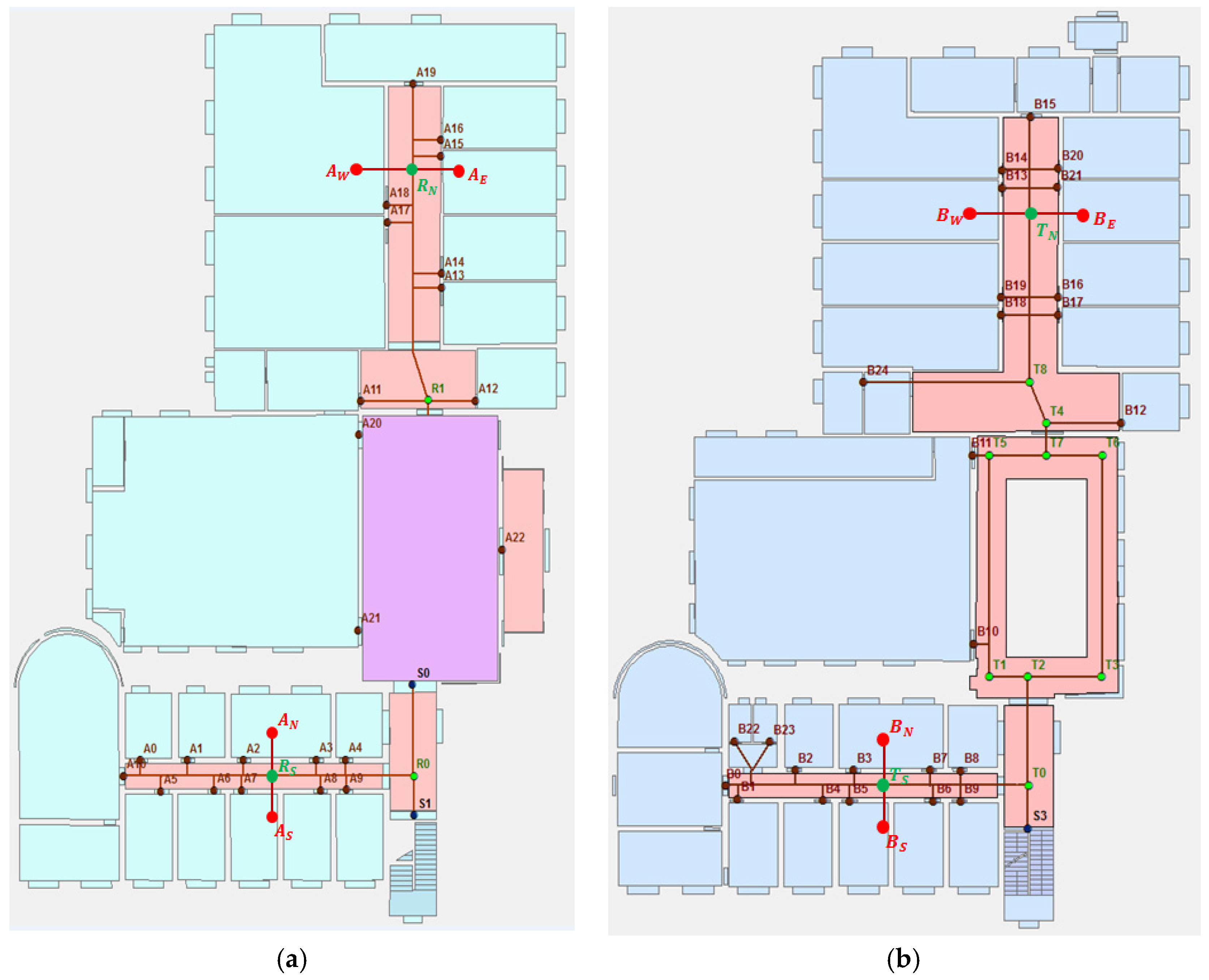
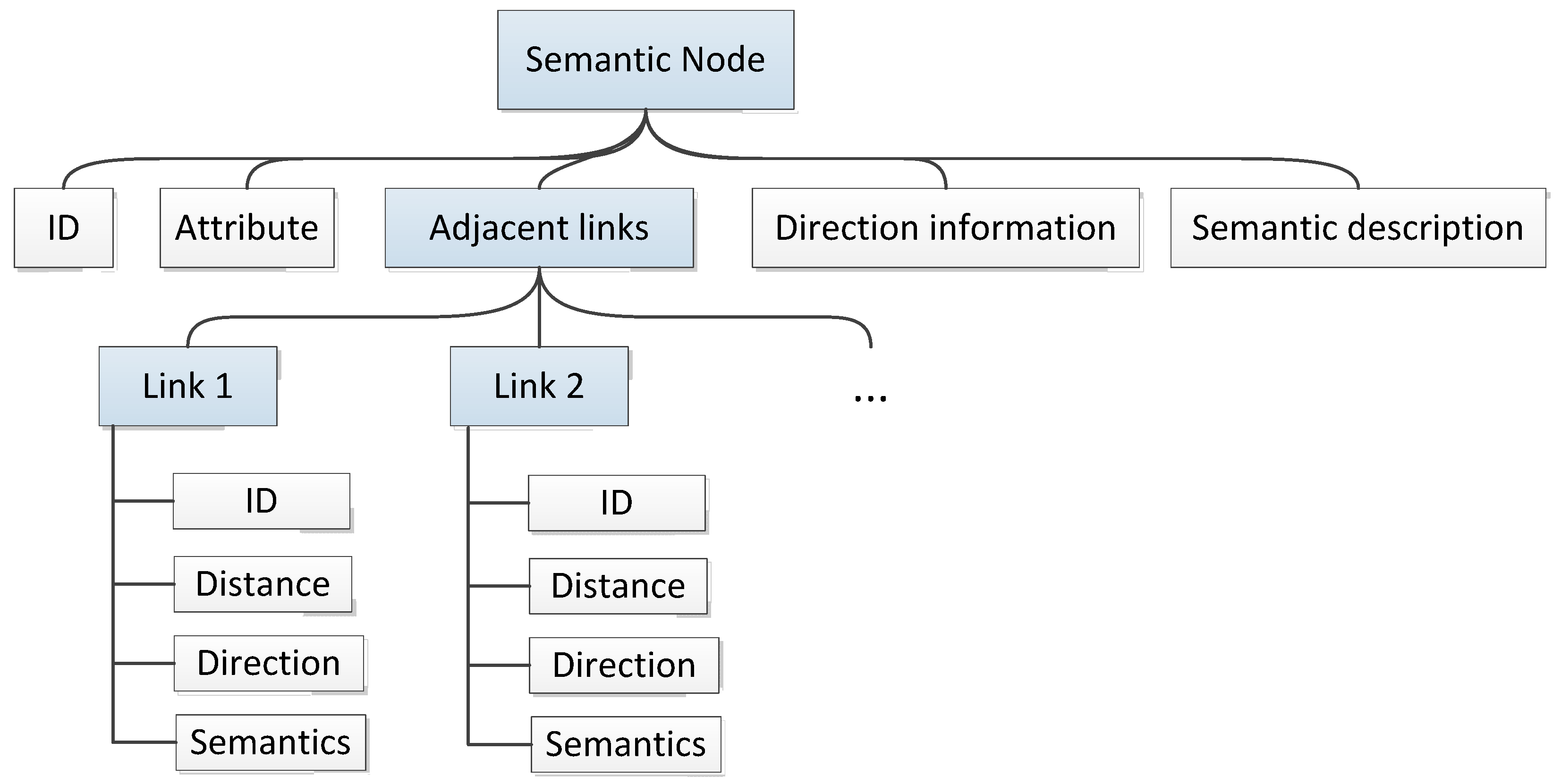
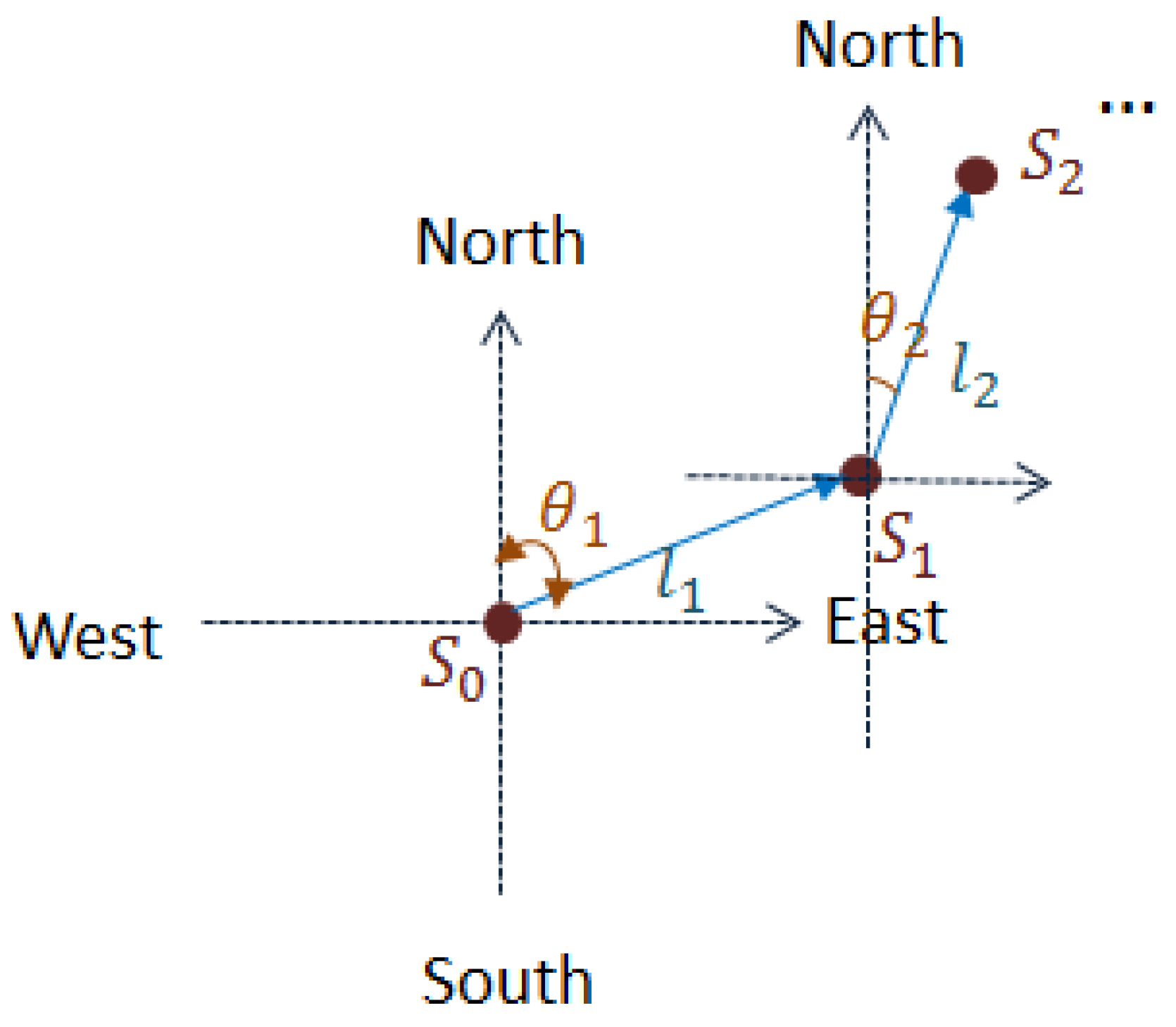
3. Semantic-Rich Indoor Link-Node Model
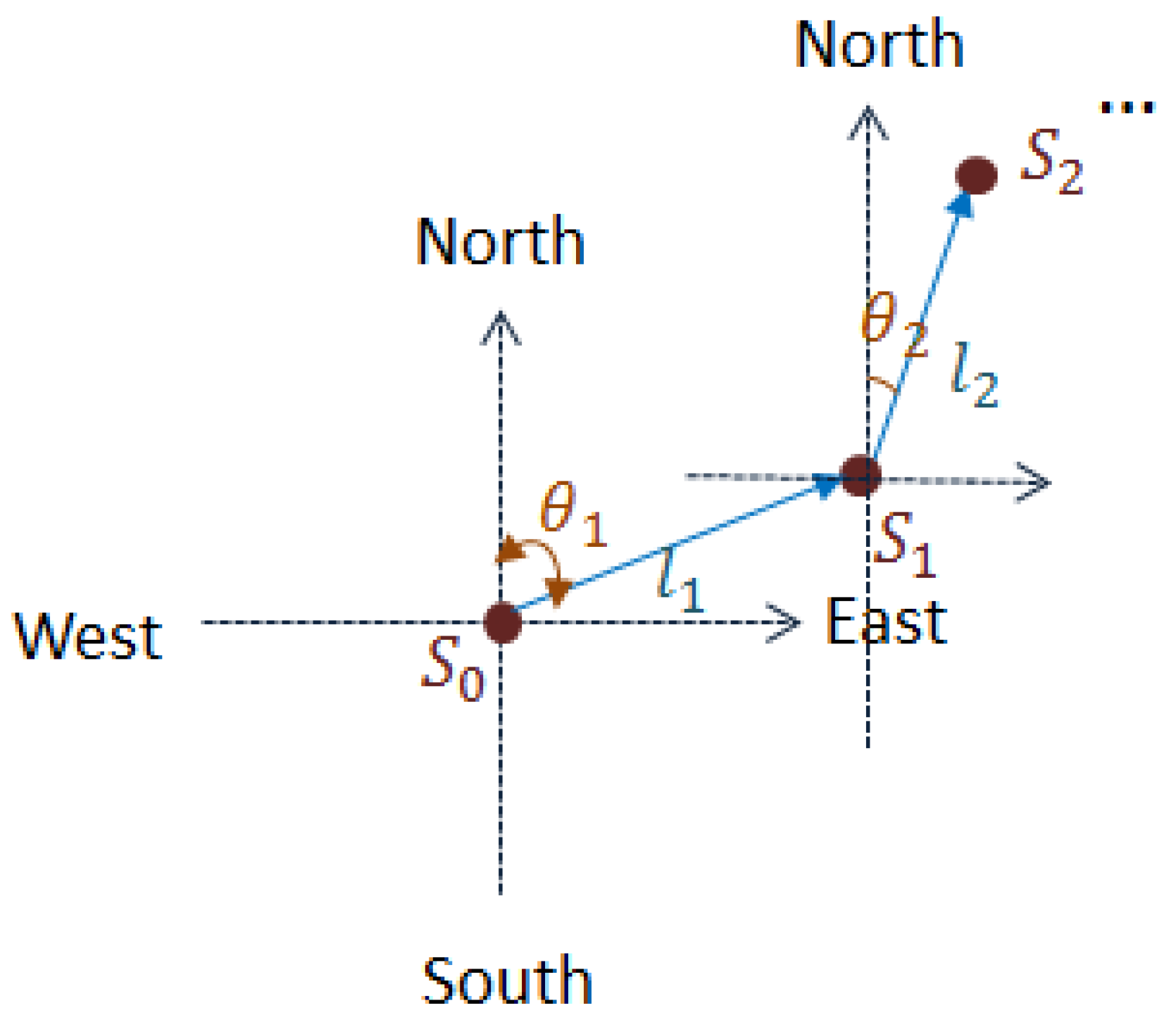
4. Trajectory Information Collection
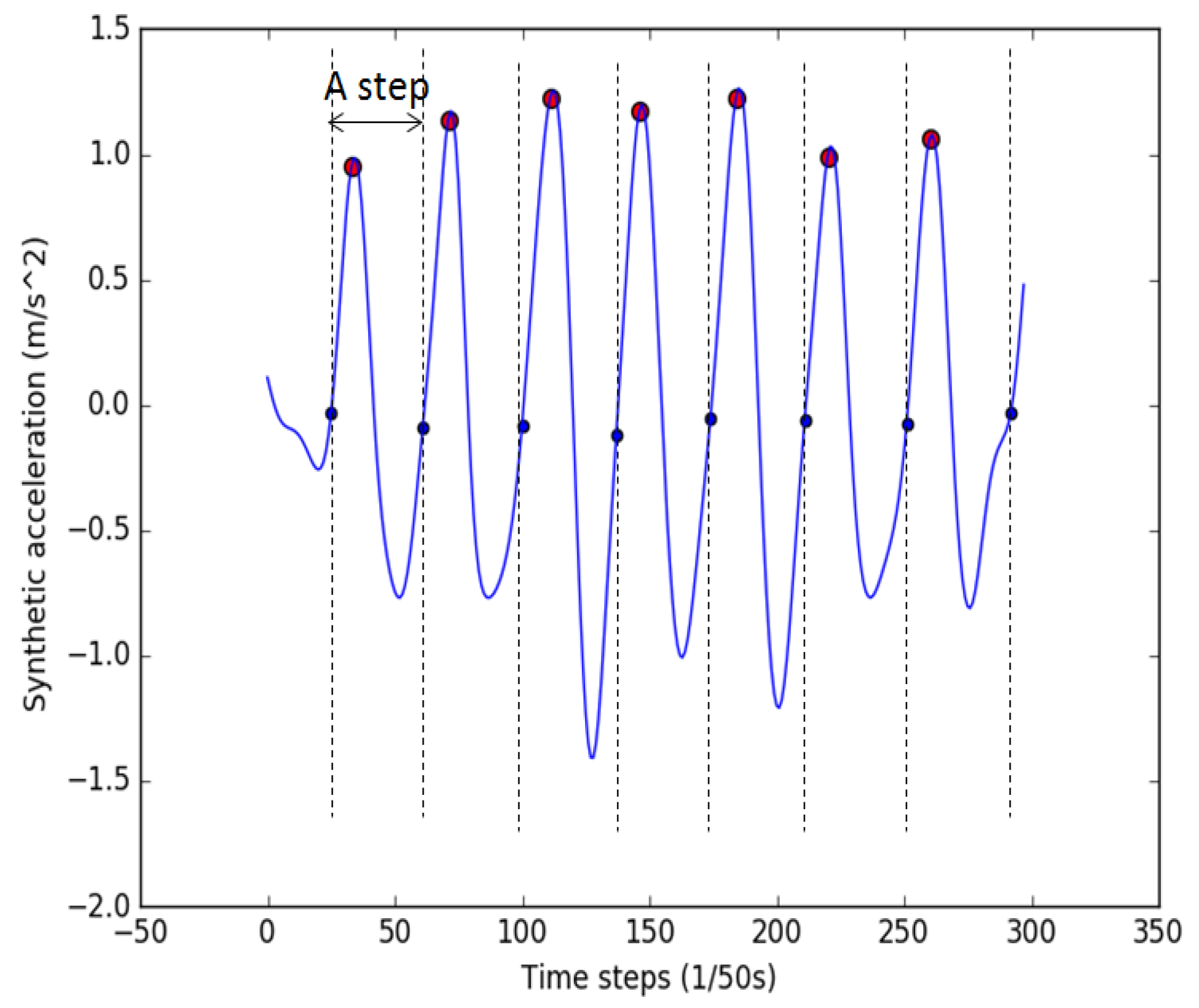
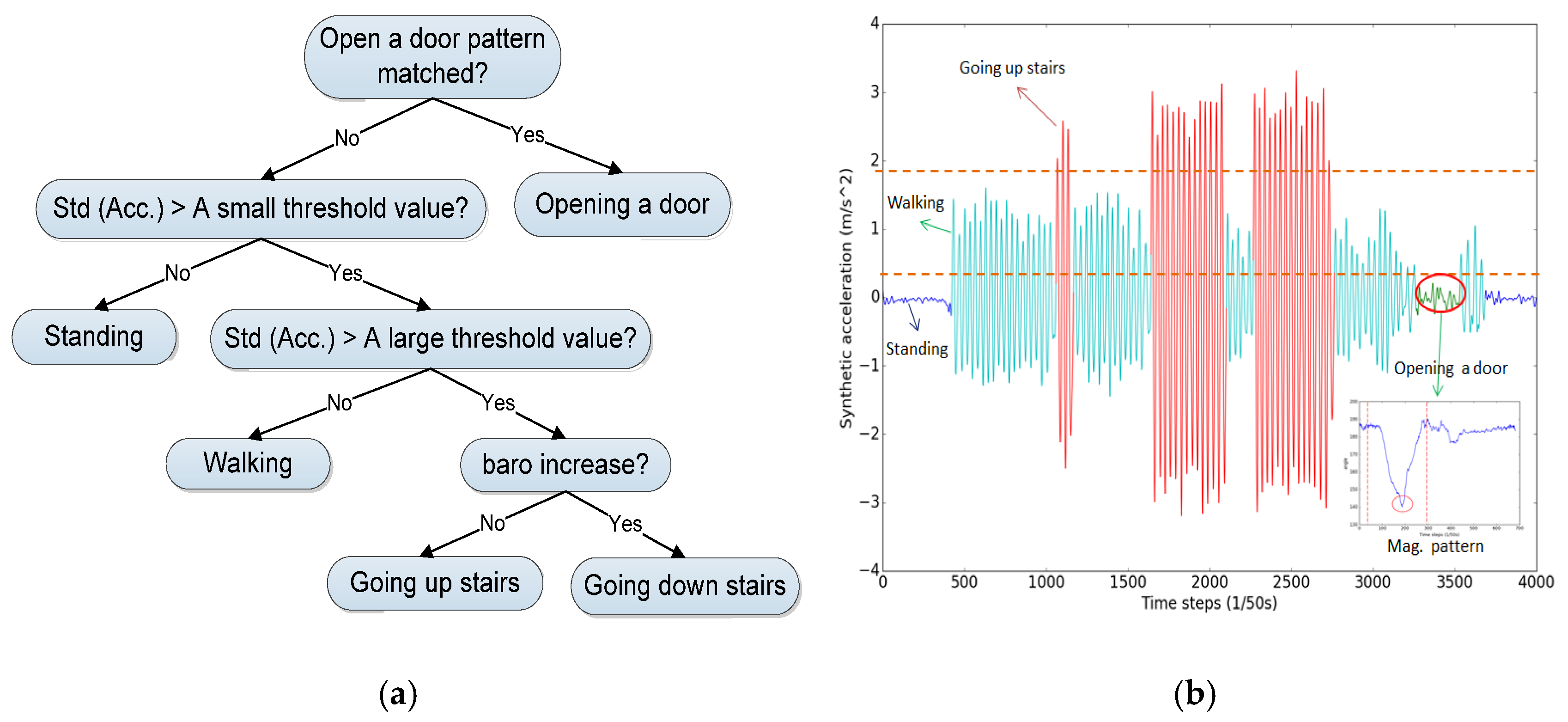
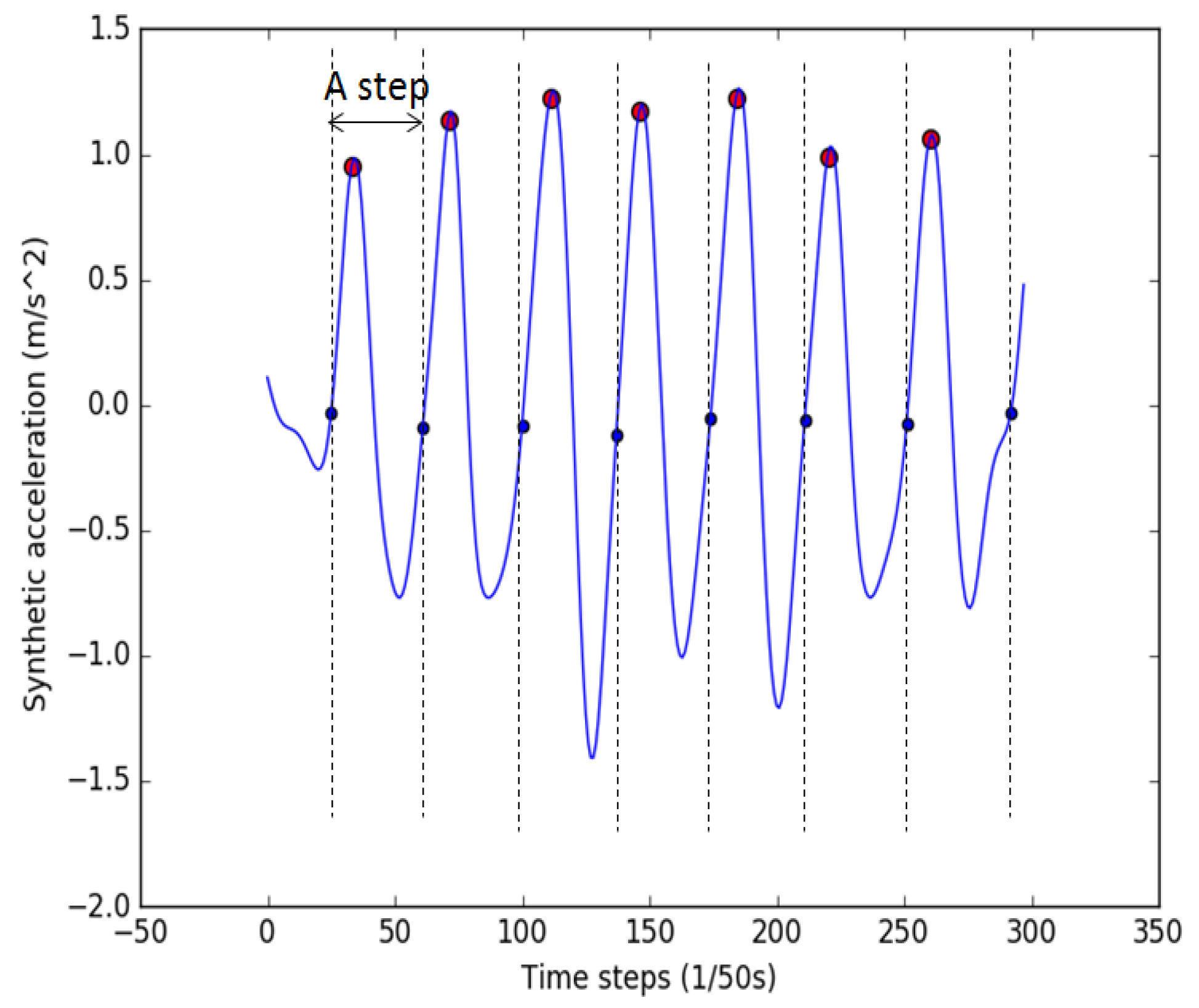
4.1. PDR-Based Information Acquisition
4.2. HAR-Based Information Recognition
5. Semantic Matching
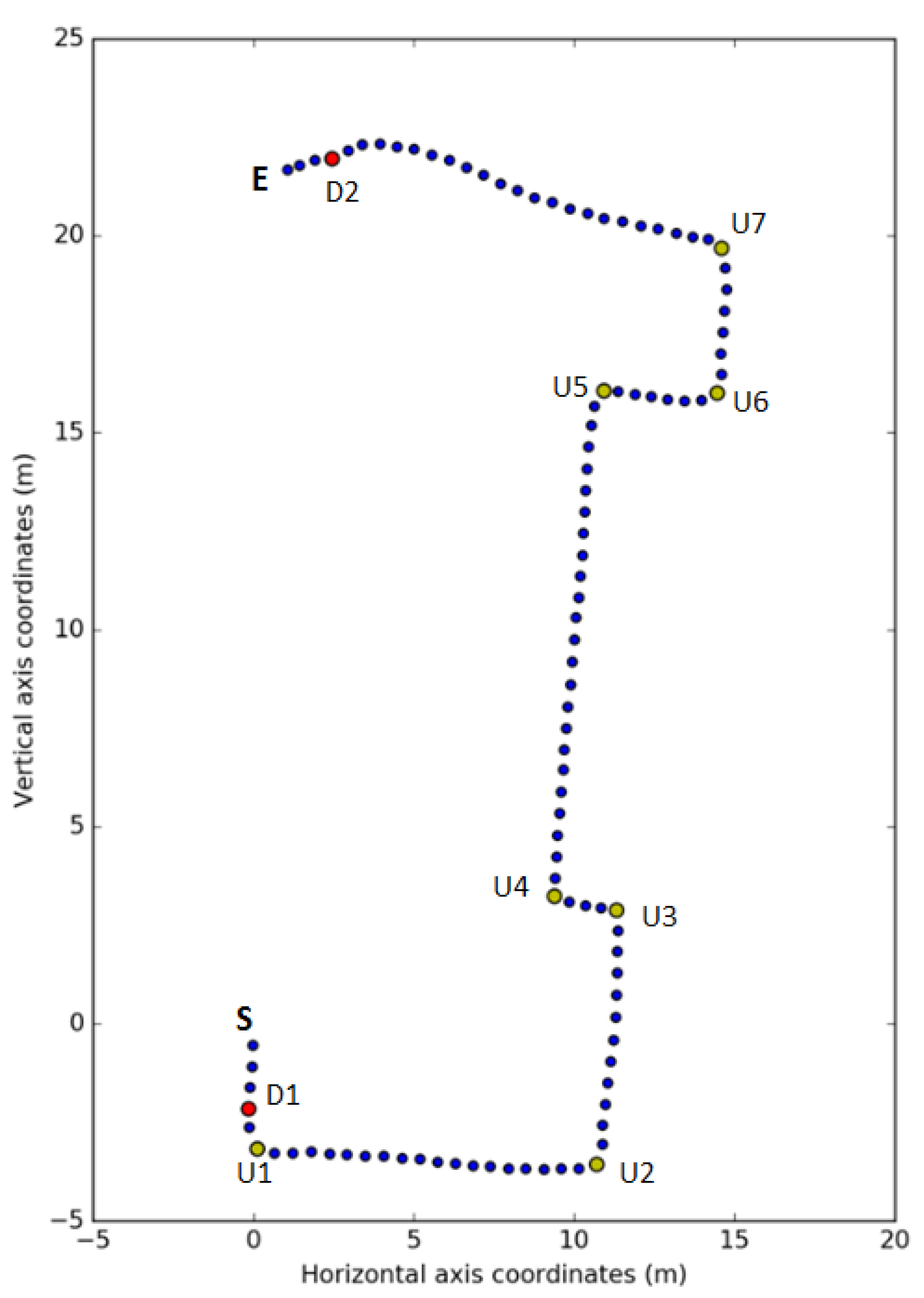
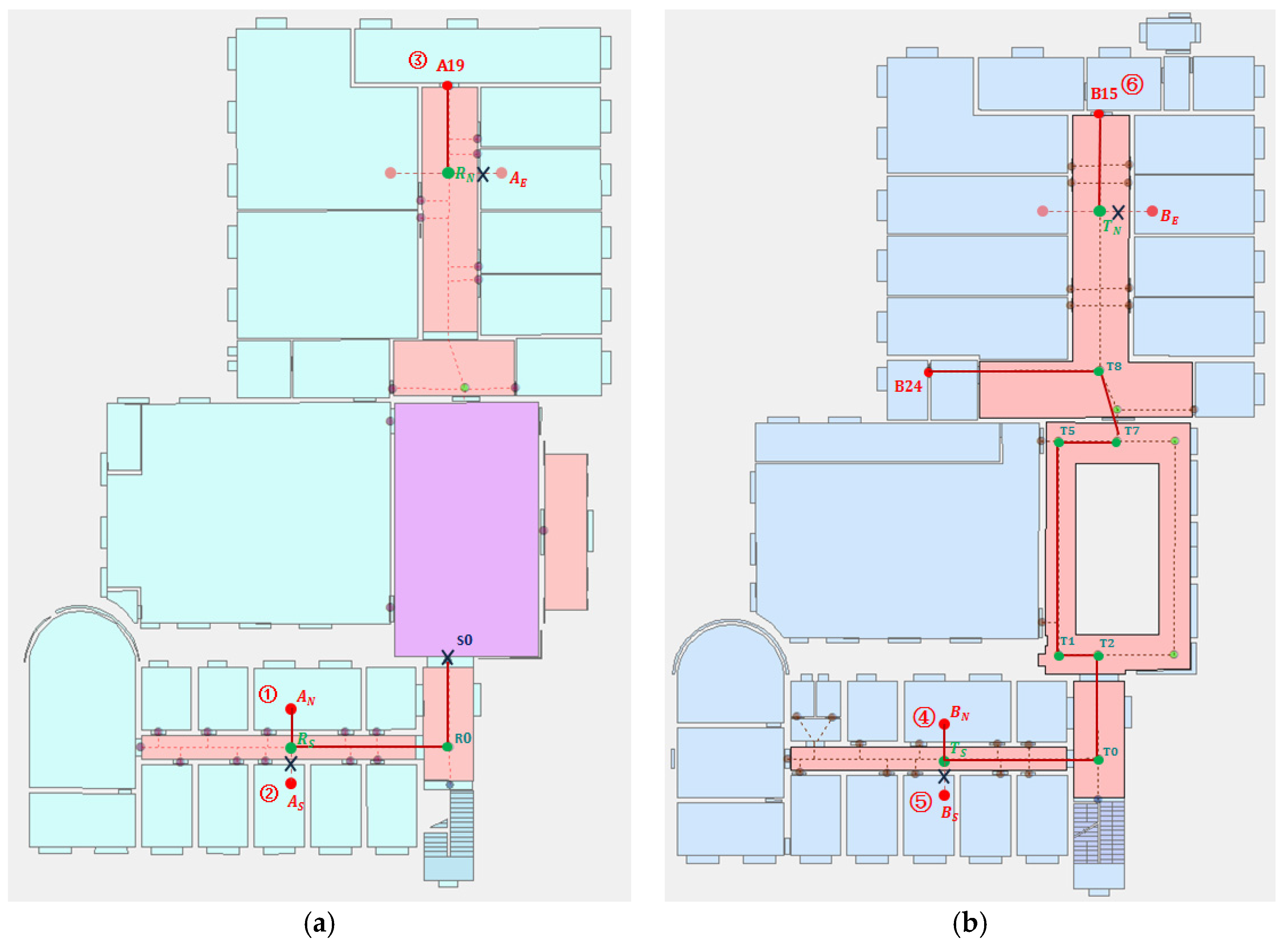
5.1. Trajectory Segmentation
5.2. Semantics-Based Trajectory Matching
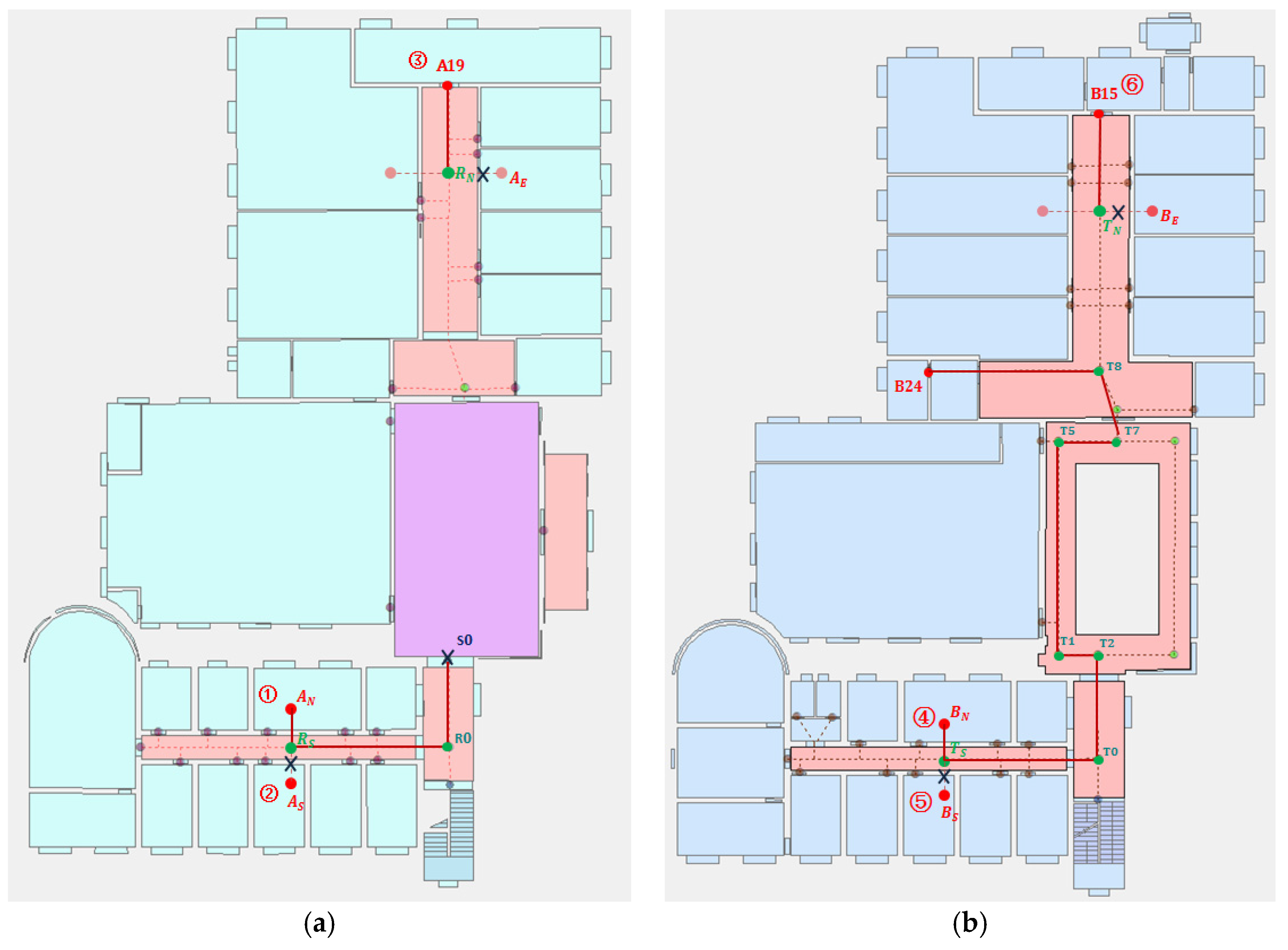
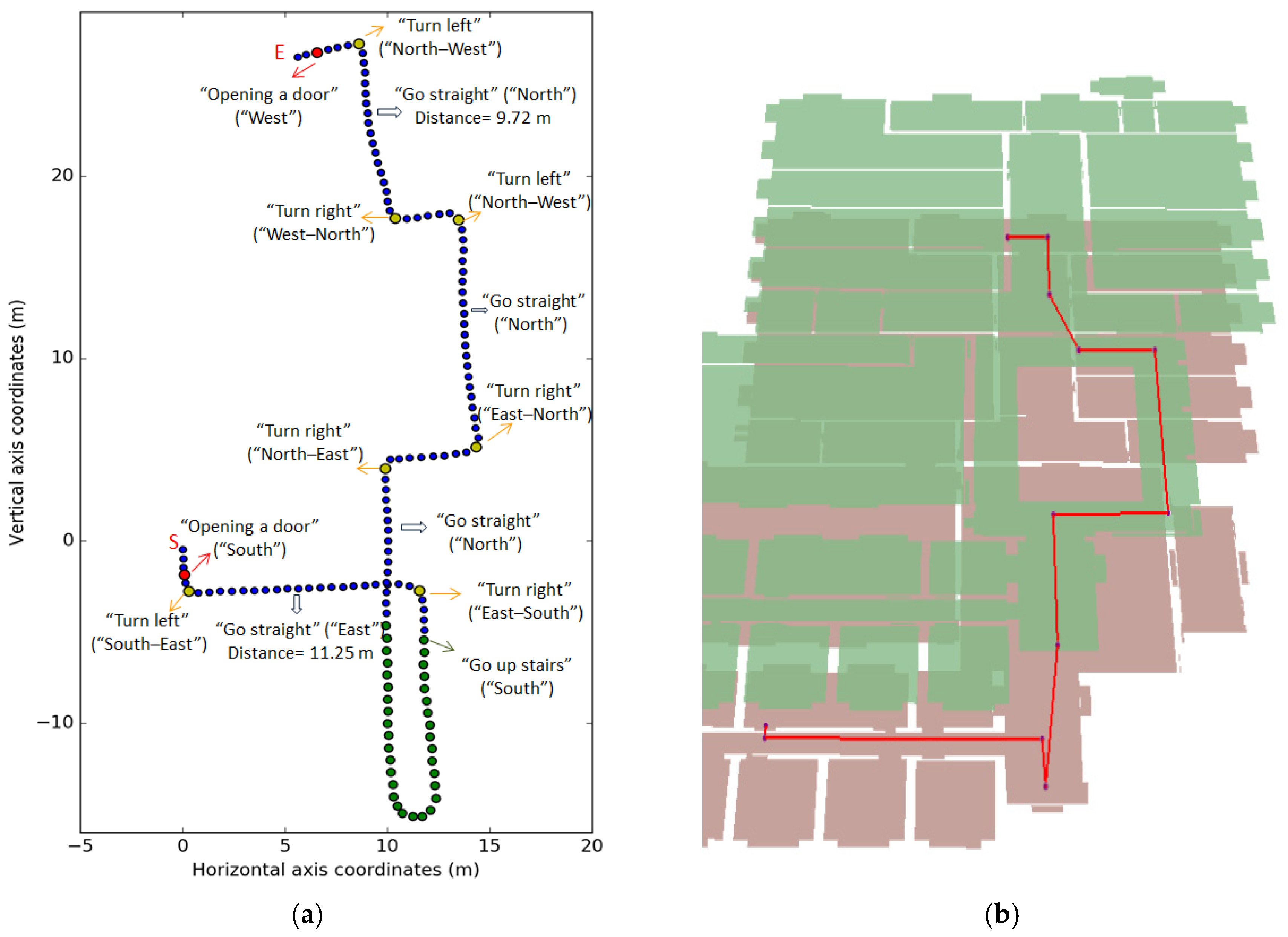
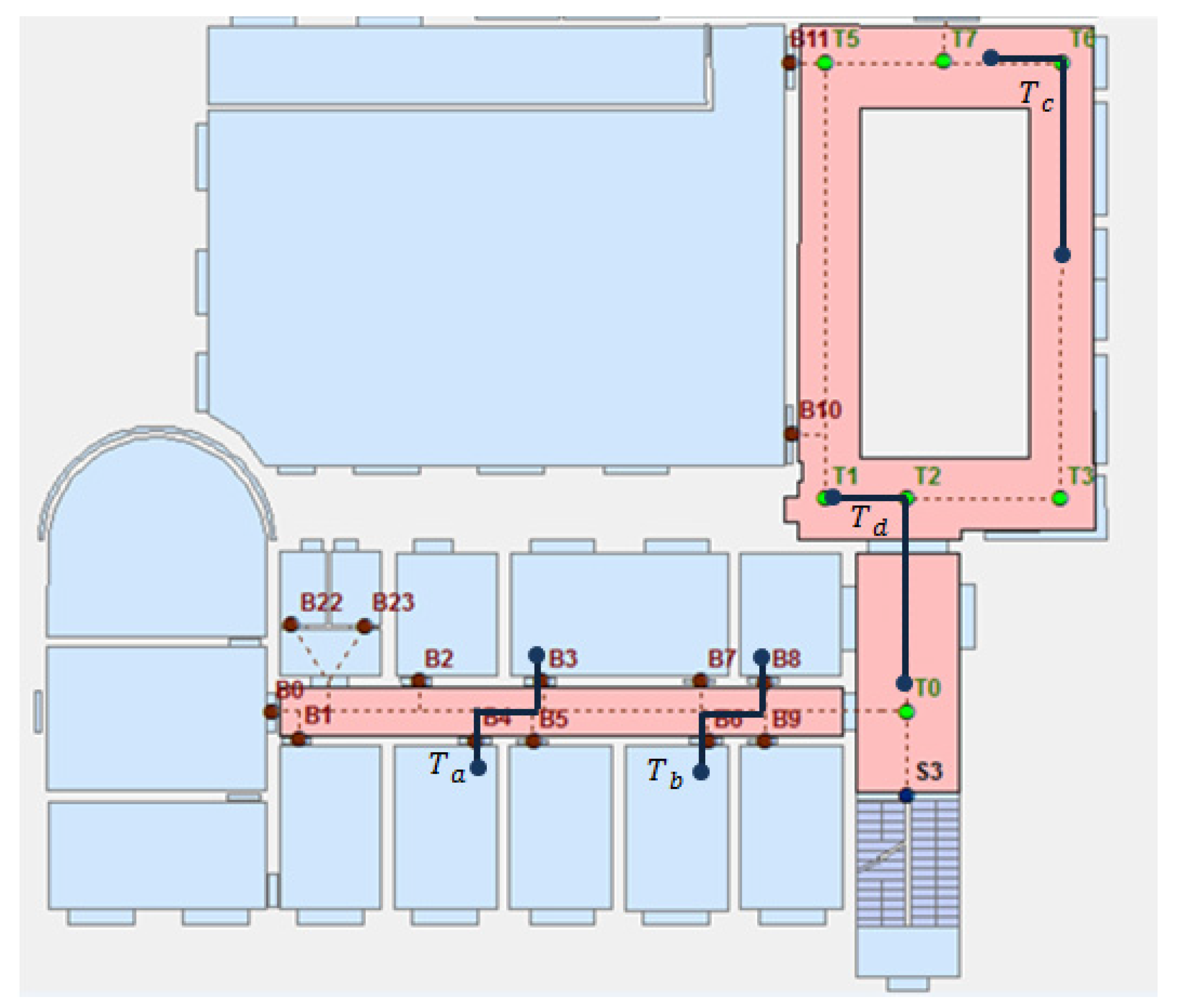
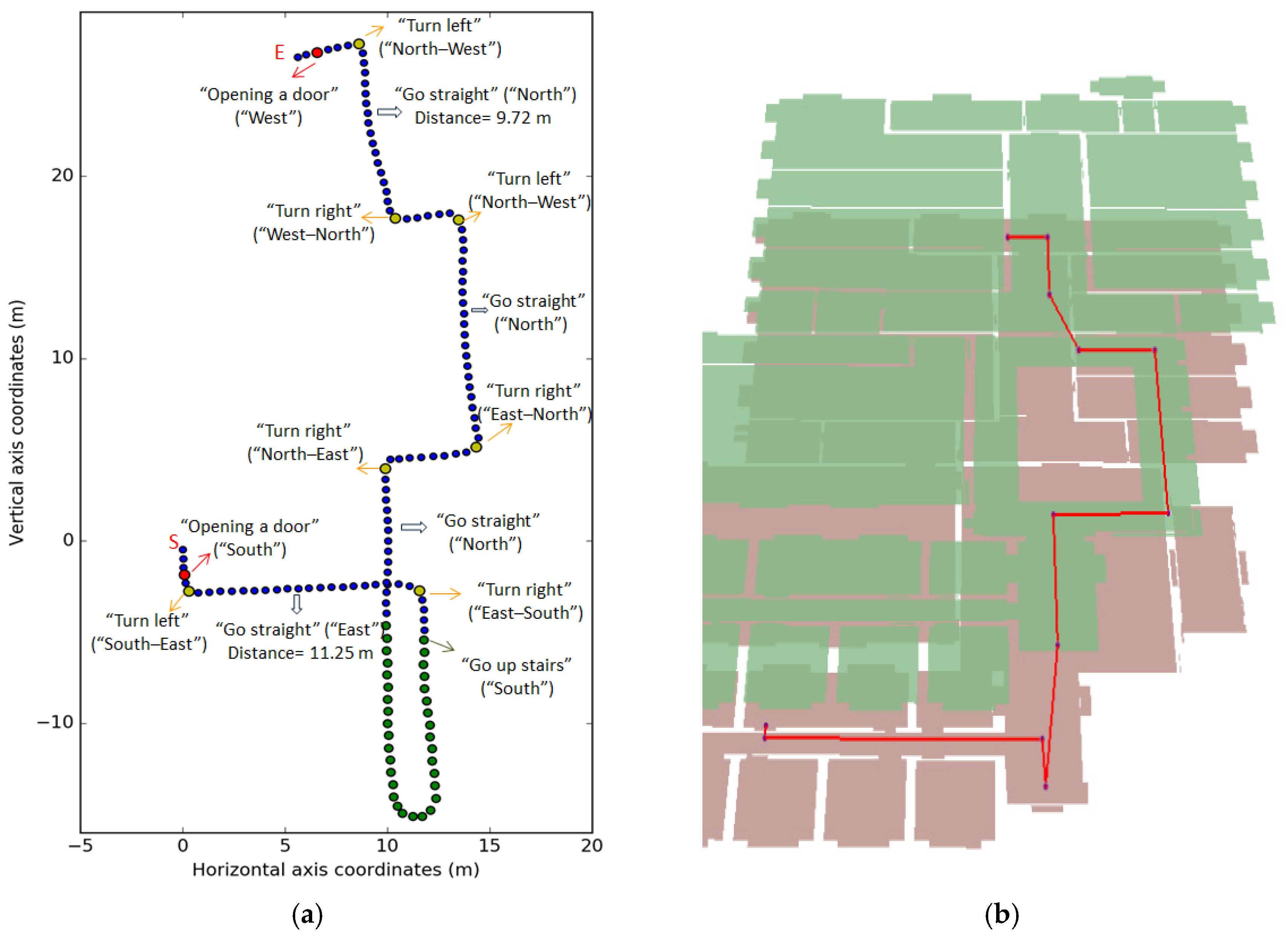
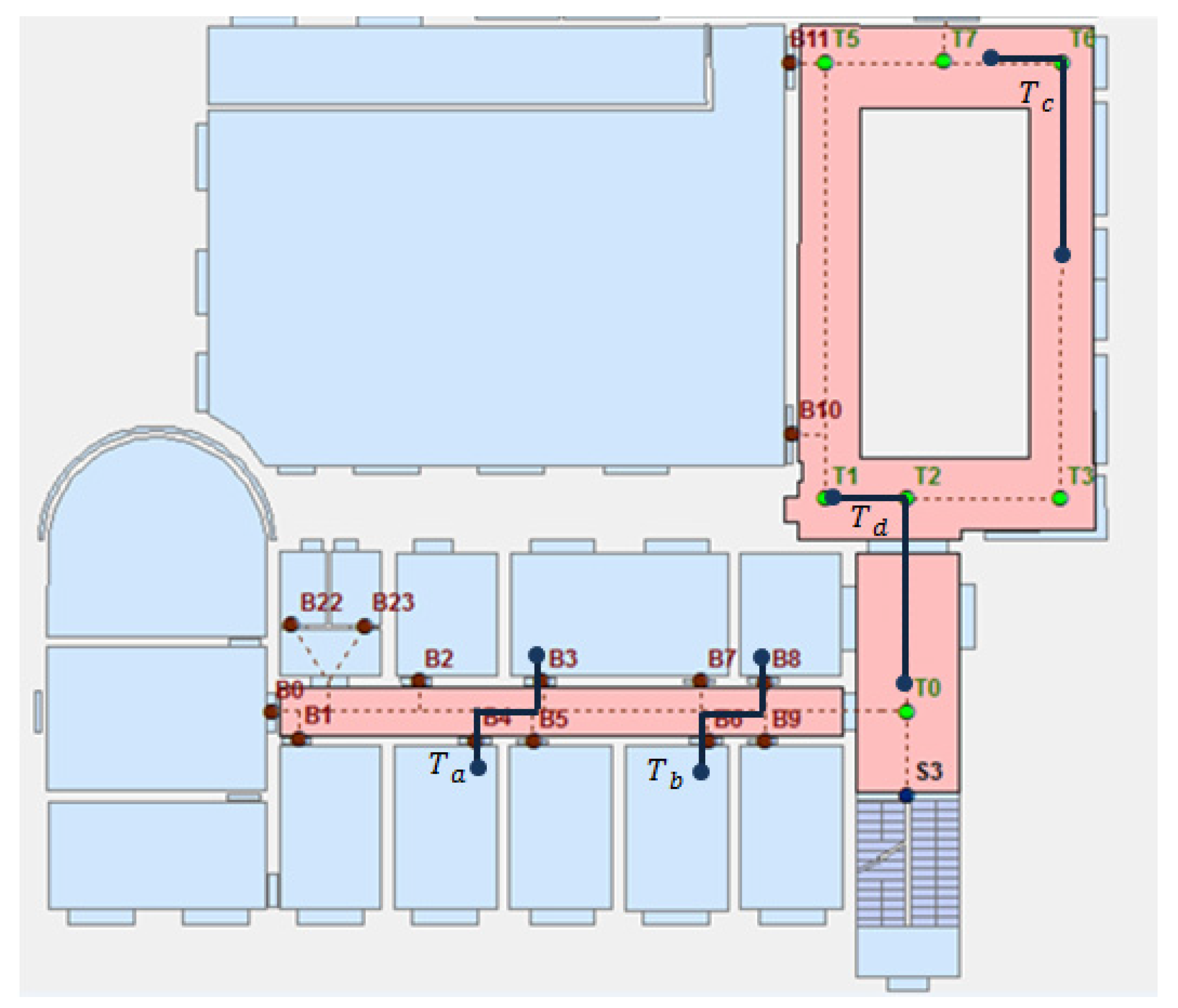
- Select the highest-weight semantic information (“Opening a door” (“South”)) and match this with the model. There are six nodes (, , , , , ) that meet this condition; they are marked in red in Figure 8. We use the serial numbers (1–6) to represent the possible trajectories.
- Match the second semantics (“Turn left” (“South–East”)) in the nodes adjacent to the previous nodes; four nodes (, , , ) match the semantics. Since the trajectory segments and do not satisfy the directional semantics (“South”), the 2nd and 5th trajectories are excluded.
- Match the third semantics (“Go straight” (“East”)); only the 1st and 4th trajectories meet the semantic conditions. Continue to match the semantics; node does not satisfy the sixth semantic (“Turn left” (“NorthWest”)); the trajectory is thus uniquely determined.
- By matching the remaining semantics in turn, the trajectory is presented at the corresponding position in the map.
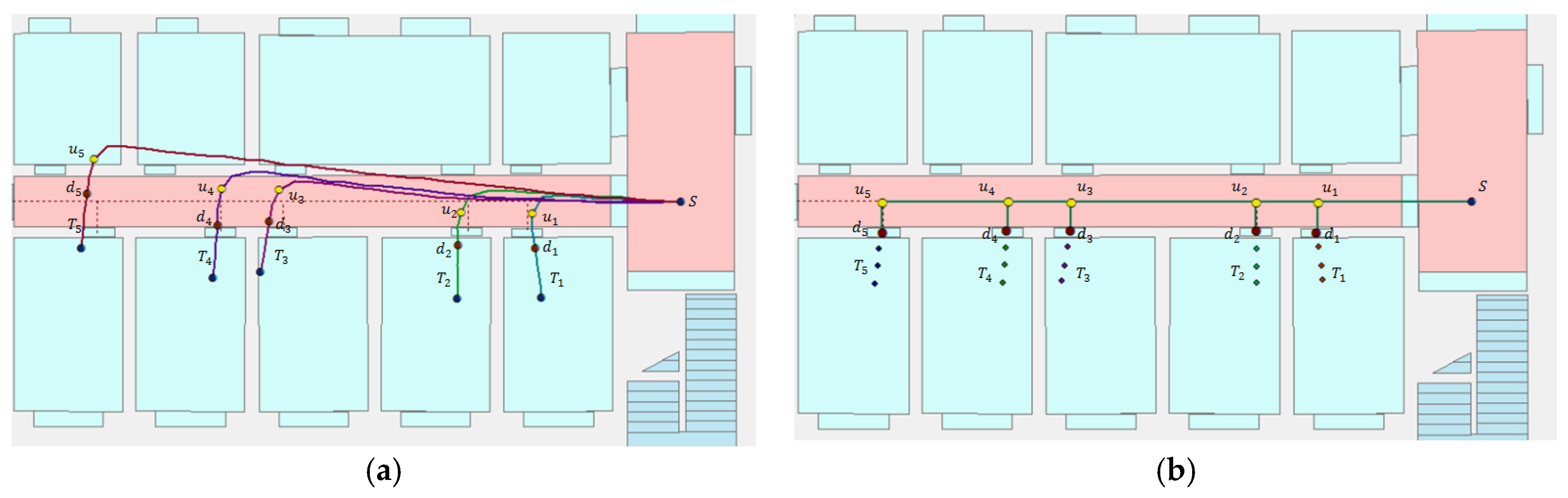
- Since is used on behalf of the door nodes , , , , , and , we need to use the distance information to exactly match the trajectory. Through the length (10.8 m) of the trajectory segment estimated by the PDR, we can easily determine that node in the trajectory corresponds to node in the proposed model.
- Finally, the start position (S) and end point (E) of the trajectories are also estimated by PDR.
6. Discussion
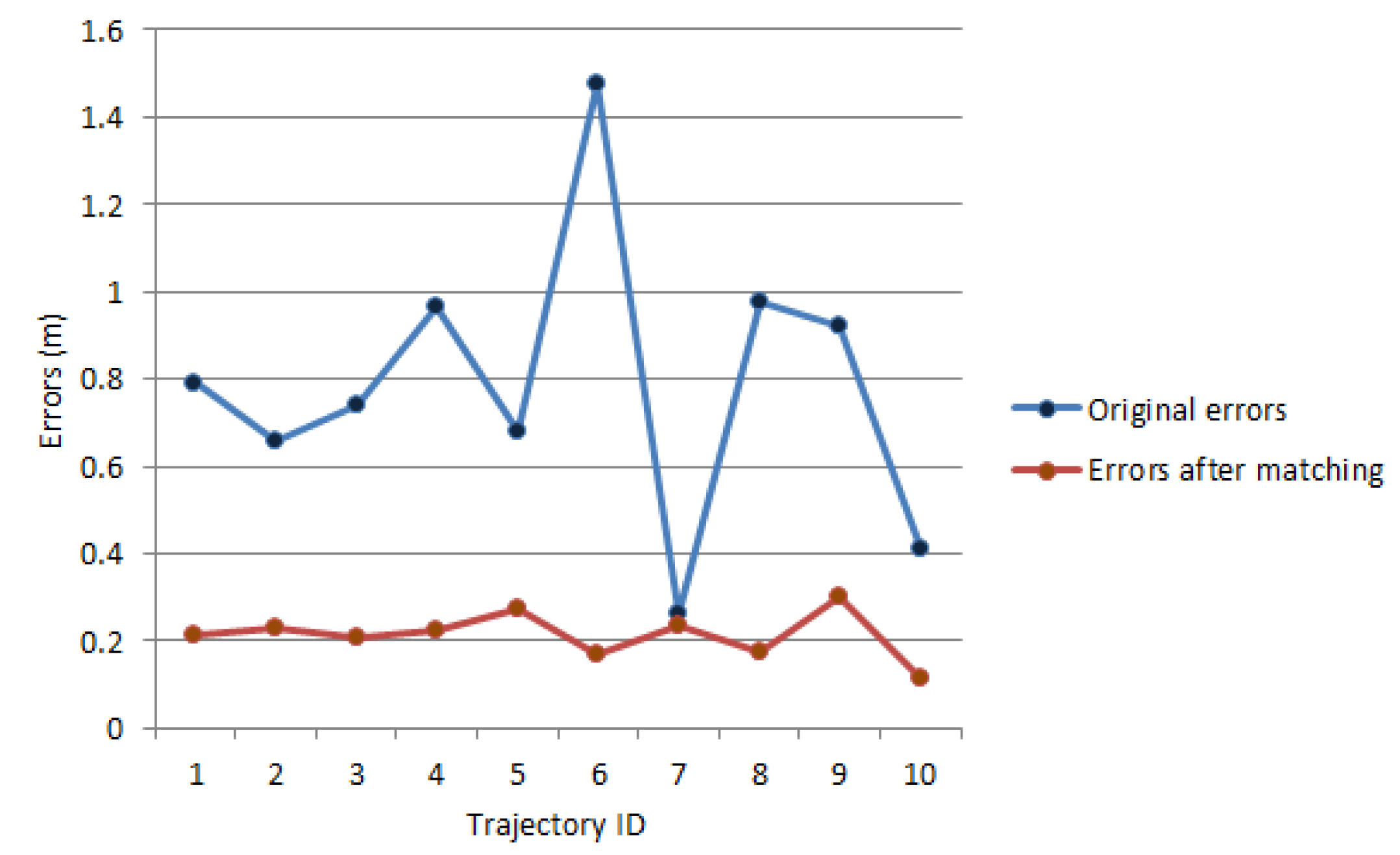
6.1. Localization Error
6.2. Time Complexity
6.3. Method Comparison
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Xu, G.; Gao, S.; Daneshmand, M.; Wang, C.; Liu, Y. A Survey for Mobility Big Data Analytics for Geolocation Prediction. IEEE Wirel. Commun. 2017, 24, 111–119. [Google Scholar] [CrossRef]
- Feng, Z.; Zhu, Y. A Survey on Trajectory Data Mining: Techniques and Applications. IEEE Access 2016, 4, 2056–2067. [Google Scholar] [CrossRef]
- Miller, H.J.; Han, J. Geographic Data Mining and Knowledge Discovery; CRC Press: Boca Raton, FL, USA, 2009; pp. 1–27. [Google Scholar]
- Lam, L.D.; Tang, A.; Grundy, J. Predicting indoor spatial movement using data mining and movement patterns. In Proceedings of the 2017 IEEE International Conference on Big Data and Smart Computing (BigComp), Jeju, Korea, 13–16 February 2017; pp. 223–230. [Google Scholar]
- Guo, S.; Xiong, H.; Zheng, X.; Zhou, Y. Activity Recognition and Semantic Description for Indoor Mobile Localization. Sensors 2017, 17, 649. [Google Scholar] [CrossRef] [PubMed]
- Tian, B.; Morris, B.T.; Tang, M.; Liu, Y.; Yao, Y.; Gou, C.; Shen, D.; Tang, S. Hierarchical and networked vehicle surveillance in its: A survey. IEEE Trans. Intell. Transp. Syst. 2017, 18, 25–48. [Google Scholar] [CrossRef]
- Ochieng, W.Y.; Quddus, M.A.; Noland, R.B. Map-matching in complex urban road networks. Braz. J. Cartogr. 2003, 55, 1–14. [Google Scholar]
- Blazquez, C.; Vonderohe, A. Simple map-matching algorithm applied to intelligent winter maintenance vehicle data. Transp. Res. Rec. 2005, 1935, 68–76. [Google Scholar] [CrossRef]
- Ascher, C.; Kessler, C.; Wankerl, M.; Trommer, G.F. Dual IMU indoor navigation with particle filter based map-matching on a smartphone. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–5. [Google Scholar]
- Ishikawa, T.; Kourogi, M.; Okuma, T.; Kurata, T. Economic and synergistic pedestrian tracking system for indoor environments. In Proceedings of the International Conference on Soft Computing and Pattern Recognition, Malacca, Malaysia, 4–7 December 2009; pp. 522–527. [Google Scholar]
- Gusenbauer, D.; Isert, C.; Krösche, J. Self-contained indoor positioning on off-the-shelf mobile devices. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–9. [Google Scholar]
- Lan, K.; Shih, W. Using Smart-Phones and Floor Plans for Indoor Location Tracking. IEEE Trans. Hum. Mach. Syst. 2014, 44, 211–221. [Google Scholar]
- Quddus, M.A.; Ochieng, W.Y.; Noland, R.B. Current map-matching algorithms for transport applications: State-of-the art and future research directions. Trans. Res. Part C Emerg. Technol. 2007, 15, 312–328. [Google Scholar] [CrossRef]
- Greenfeld, J.S. Matching GPS observations to locations on a digital map. In Proceedings of the Transportation Research Board 81st Annual Meeting, Washington, DC, USA, 13 January 2002. [Google Scholar]
- Jiménez, A.R.; Seco, F.; Zampella, F.; Prieto, J.C.; Guevara, J. Improved heuristic drift elimination with magnetically-aided dominant directions (MiHDE) for pedestrian navigation in complex buildings. J. Locat. Based Ser. 2012, 6, 186–210. [Google Scholar] [CrossRef]
- Link, J.A.B.; Smith, P.; Viol, N.; Wehrle, K. Footpath: Accurate map-based indoor navigation using smartphones. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN 2011), Guimaraes, Portugal, 21–23 September 2011; pp. 1–8. [Google Scholar]
- Yin, H.; Wolfson, O. A weight-based map matching method in moving objects databases. In Proceedings of the 16th International Conference on Scientific and Statistical Database Management, Santorini Island, Greece, 21–23 June 2004; pp. 437–438. [Google Scholar]
- Pink, O.; Hummel, B. A statistical approach to map matching using road network geometry, topology and vehicular motion constraints. In Proceedings of the 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; pp. 862–867. [Google Scholar]
- Liu, J.; Wolfson, O.; Yin, H. Extracting semantic location from outdoor positioning systems. In Proceedings of the 7th International Conference on Mobile Data Management, Nara, Japan, 9–13 May 2006; p. 73. [Google Scholar]
- Brakatsoulas, S.; Pfoser, D.; Tryfona, N. Modeling, storing and mining moving object databases. In Proceedings of the International Database Engineering and Applications Symposium (IDEAS 2004), Coimbra, Portugal, 7–9 July 2004; pp. 68–77. [Google Scholar]
- Spaccapietra, S.; Parent, C.; Damiani, M.L.; de Macedo, J.A.; Porto, F.; Vangenot, C. A conceptual view on trajectories. Data Knowl. Eng. 2008, 65, 126–146. [Google Scholar] [CrossRef]
- Li, Q.; Zheng, Y.; Xie, X.; Chen, Y.; Liu, W.; Ma, W. Mining user similarity based on location history. In Proceedings of the 16th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Irvine, CA, USA, 5–7 November 2008; p. 34. [Google Scholar]
- Ying, J.J.; Lu, E.H.; Lee, W.; Weng, T.; Tseng, V.S. Mining user similarity from semantic trajectories. In Proceedings of the 2nd ACM SIGSPATIAL International Workshop on Location Based Social Networks, San Jose, CA, USA, 3–5 November 2010; pp. 19–26. [Google Scholar]
- Ying, J.J.; Lee, W.; Weng, T.; Tseng, V.S. Semantic trajectory mining for location prediction. In Proceedings of the 19th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Chicago, IL, USA, 1–4 November 2011; pp. 34–43. [Google Scholar]
- Liu, J.; Zhu, L.; Wang, Y.; Liang, X.; Hyyppä, J.; Chu, T.; Liu, K.; Chen, R. Reciprocal Estimation of Pedestrian Location and Motion State toward a Smartphone Geo-Context Computing Solution. Micromachines 2015, 6, 699–717. [Google Scholar] [CrossRef]
- Newson, P.; Krumm, J. Hidden Markov map matching through noise and sparseness. In Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 1–4 November 2009; pp. 336–343. [Google Scholar]
- Yuan, J.; Zheng, Y.; Zhang, C.; Xie, X.; Sun, G. An interactive-voting based map matching algorithm. In Proceedings of the 11th International Conference on Mobile Data Management, Kanas City, MO, USA, 23–26 May 2010; pp. 43–52. [Google Scholar]
- Obradovic, D.; Lenz, H.; Schupfner, M. Fusion of map and sensor data in a modern car navigation system. J. VLSI Sig. Proc. 2006, 45, 111–122. [Google Scholar] [CrossRef]
- Quddus, M.A.; Noland, R.B.; Ochieng, W.Y. A high accuracy fuzzy logic based map matching algorithm for road transport. J. Intell. Transp. Syst. Technol. Plann. Oper. 2006, 10, 103–115. [Google Scholar] [CrossRef]
- Kim, S.; Kim, J. Adaptive fuzzy-network-based C-measure map-matching algorithm for car navigation system. IEEE Trans. Ind. Electron. 2001, 48, 432–441. [Google Scholar]
- Walder, U.; Bernoulli, T. Context-adaptive algorithms to improve indoor positioning with inertial sensors. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN 2010), Zurich, Switzerland, 15–17 September 2010; pp. 965–970. [Google Scholar]
- Wang, H.; Sen, S.; Elgohary, A.; Farid, M.; Youssef, M.; Choudhury, R.R. No need to war-drive: Unsupervised indoor localization. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, Ambleside, UK, 25–29 June 2012; pp. 197–210. [Google Scholar]
- Li, F.; Zhao, C.; Ding, G.; Gong, J.; Liu, C.; Zhao, F. A reliable and accurate indoor localization method using phone inertial sensors. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 421–430. [Google Scholar]
- Leppäkoski, H.; Collin, J.; Takala, J. Pedestrian navigation based on inertial sensors, indoor map, and WLAN signals. J. Sig. Proc. Syst. 2013, 71, 287–296. [Google Scholar] [CrossRef]
- Wang, H.; Lenz, H.; Szabo, A.; Bamberger, J.; Hanebeck, U.D. WLAN-based pedestrian tracking using particle filters and low-cost MEMS sensors. In Proceedings of the 4th Workshop on Positioning, Navigation and Communication (WPNC 07), Hannover, Germany, 22 Marth 2007; pp. 1–7. [Google Scholar]
- Xiao, Z.; Wen, H.; Markham, A.; Trigoni, N. Lightweight map matching for indoor localisation using conditional random fields. In Proceedings of the 13th International Symposium on Information Processing in Sensor Networks (IPSN-14), Berlin, Germany, 15–17 April 2014; pp. 131–142. [Google Scholar]
- Zhou, B.; Li, Q.; Mao, Q.; Tu, W.; Zhang, X.; Chen, L. ALIMC: Activity Landmark-Based Indoor Mapping via Crowdsourcing. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2774–2785. [Google Scholar] [CrossRef]
- Gilliéron, P.; Merminod, B. Personal navigation system for indoor applications. In Proceedings of the 11th IAIN World Congress, Smart Navigation—Systems and Services, Berlin, Germany, 21–24 October 2003; pp. 21–24. [Google Scholar]
- Incel, O.D.; Kose, M.; Ersoy, C. A Review and Taxonomy of Activity Recognition on Mobile Phones. Bionanoscience 2013, 3, 145–171. [Google Scholar] [CrossRef]
- Zhuang, Y.; Lan, H.; Li, Y.; El-Sheimy, N. PDR/INS/WiFi Integration Based on Handheld Devices for Indoor Pedestrian Navigation. Micromachines 2015, 6, 793–812. [Google Scholar] [CrossRef]
- Kang, W.; Han, Y. SmartPDR: Smartphone-Based Pedestrian Dead Reckoning for Indoor Localization. IEEE Sens. J. 2015, 15, 2906–2916. [Google Scholar] [CrossRef]
- Shoaib, M.; Bosch, S.; Incel, O.; Scholten, H.; Havinga, P. A Survey of Online Activity Recognition Using Mobile Phones. Sensors 2015, 15, 2059–2085. [Google Scholar] [CrossRef] [PubMed]
- Masiero, A.; Guarnieri, A.; Pirotti, F.; Vettore, A. A Particle Filter for Smartphone-Based Indoor Pedestrian Navigation. Micromachines 2014, 5, 1012–1033. [Google Scholar] [CrossRef]
- Wilk, P.; Karciarz, J. Optimization of map matching algorithms for indoor navigation in shopping malls. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN 2014), Busan, Korea, 27–30 October 2014; pp. 661–669. [Google Scholar]
- Zampella, F.; Ruiz, A.R.J.; Granja, F.S. Indoor positioning using efficient map matching, RSS measurements, and an improved motion model. IEEE Trans. Veh. Technol. 2015, 64, 1304–1317. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Semantic Information | Attributes | Frequency (f1) 1 | Frequency (f2) | Weight |
|---|---|---|---|---|
| “Opening a door” (“South”) | Node | 3 | 3 | High |
| “Turn left” (“South-East”) | Node | 3 | 4 | High |
| “Go straight” (“East”) | Link | 6 | 7 | Medium |
| “Turn left” (“East-North”) | Node | 4 | 6 | Medium |
| “Go straight” (“North”) | Link | 8 | 9 | Low |
| “Turn left” (“North-West”) | Node | 4 | 6 | Medium |
| “Turn right” (“West-North”) | Node | 3 | 5 | Medium |
| “Turn right” (“North-East”) | Node | 3 | 5 | Medium |
| “Go straight” (“West”) | Link | 6 | 8 | Medium |
| “Opening a door” (“West”) | Node | 8 | 7 | Medium |
| Trajectory | Trajectory Segment | Semantics | Time Complexity | Number 1 |
|---|---|---|---|---|
| Node 1 (D1) | “Opening a door” (“South”) | O(N) | 6 | |
| Node 2 (U1) | “Turn left” (“South–East”) | O(4) | 4 | |
| Segment 2 () | “Go straight” (“East”) | O(4) | 2 | |
| Node 3 (U2) | “Turn left” (“East–North”) | O(4) | 2 | |
| Segment 3 () | “Go straight” (“North”) | O(4) | 2 | |
| Node 4 (U3) | “Turn left” (“North–West”) | O(2) | 1 | |
| Node 5 (U4) | “Turn right” (“West–North”) | O(1) | 1 | |
| Segment 5 () | “Go straight” (“North”) | O(1) | 1 | |
| Node 6 (U5) | “Turn right” (“North–East”) | O(1) | 1 | |
| Node 7 (U6) | “Turn left” (“East–North”) | O(2) | 1 | |
| Node 8 (U7) | “Turn left” (“North–West”) | O(3) | 1 | |
| Segment 8 () | “Go straight” (“West”) | O(1) | 1 | |
| Node 9 (D2) | “Opening a door” (“West”) | O(1) | 1 |
| Feature | Geometric-Based Methods | Topology-Based Approach | Advance Methods | Our Method |
|---|---|---|---|---|
| Requirement | Indoor maps | Indoor maps, (link-node network) | Indoor maps, (radio sensors) | Indoor maps |
| Input | Spatial network | Distance information; angle information | Restrictions | Semantic-rich link-node model |
| Matching algorithms | Point-to-point matching; point-to-curve matching; curve-to-curve matching | Geometric similarity; shape similarity | Kalman filters; particle filters; Hidden Markov model; conditional random field | Semantics search |
| Output | Location | Location and shape | Location | Location and semantics |
| Advantages | Simple and fast | Rich structure information | High precision | Simple calculation and good scalability |
| Disadvantages | Require high data accuracy; error-prone | Low efficiency | Computational complexity | Model construction time-consuming |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, S.; Xiong, H.; Zheng, X. A Novel Semantic Matching Method for Indoor Trajectory Tracking. ISPRS Int. J. Geo-Inf. 2017, 6, 197. https://doi.org/10.3390/ijgi6070197
Guo S, Xiong H, Zheng X. A Novel Semantic Matching Method for Indoor Trajectory Tracking. ISPRS International Journal of Geo-Information. 2017; 6(7):197. https://doi.org/10.3390/ijgi6070197
Chicago/Turabian StyleGuo, Sheng, Hanjiang Xiong, and Xianwei Zheng. 2017. "A Novel Semantic Matching Method for Indoor Trajectory Tracking" ISPRS International Journal of Geo-Information 6, no. 7: 197. https://doi.org/10.3390/ijgi6070197
APA StyleGuo, S., Xiong, H., & Zheng, X. (2017). A Novel Semantic Matching Method for Indoor Trajectory Tracking. ISPRS International Journal of Geo-Information, 6(7), 197. https://doi.org/10.3390/ijgi6070197