3.3. Spatial Uncertainty Model for Linear Feature Simplification
Spatial uncertainty is a non-negligible attribute of spatial data throughout their whole lifecycle. In a simple example shown in
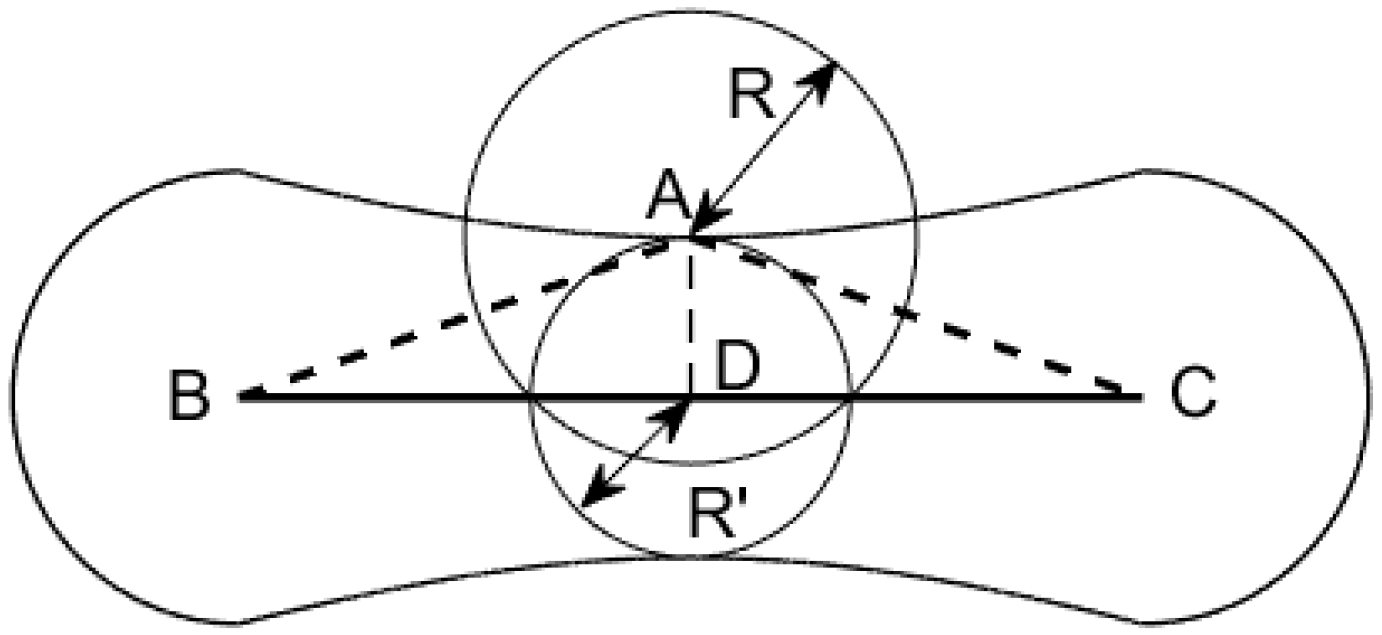
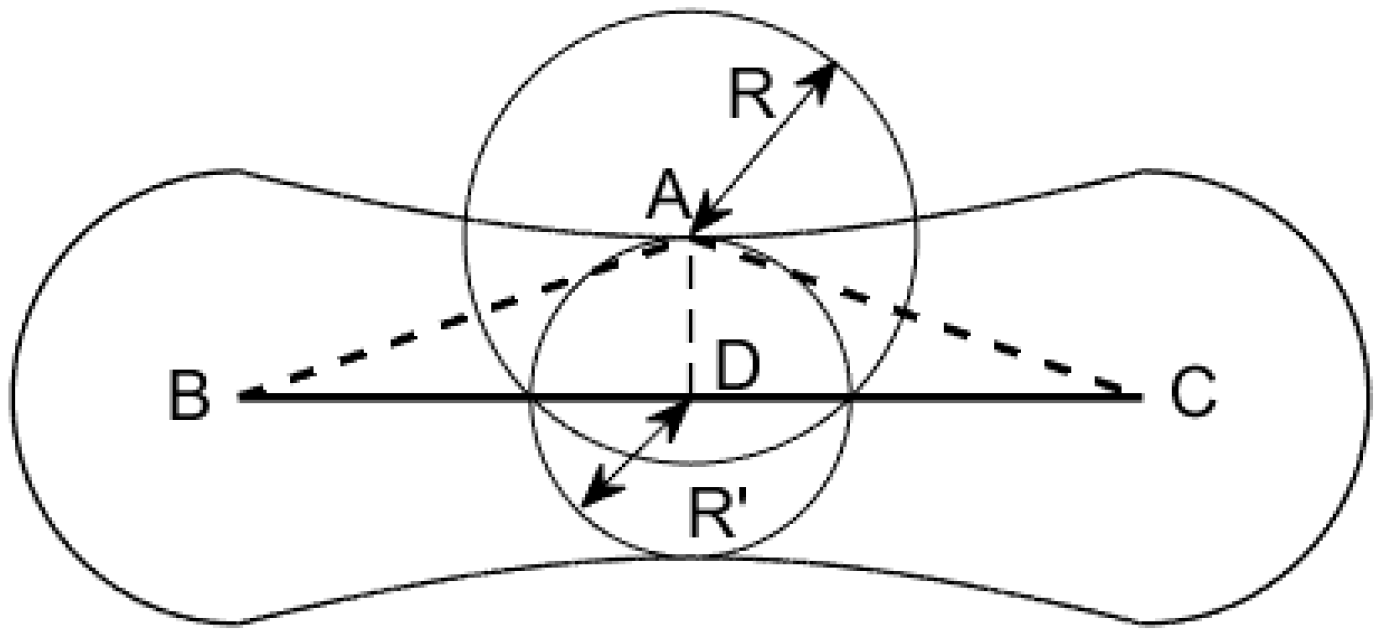
Figure 2, the original linear feature contains three vertices: B, A, and C. After generalization, vertex A is simplified, namely, the linear feature BAC becomes BC. Assume BAC to be the observed data with spatial uncertainty
obeying a two-dimensional normal distribution where the probability distributions in x and y directions are independent and identical. Then, the uncertainty region of BC can be drawn using the error-band model.
Obviously, this model considers the spatial uncertainty of vertices larger than that of intermediate points. The uncertainty region of A is shown by centered on A with a radius of R, where R is a function related to the uncertainty model used (standard deviation, limit deviation, etc.) and the corresponding uncertainty value. After generalization, vertex A is mapped to an intermediate point D in BC, whose uncertainty is shown by centered on D with a radius of R’, where is equal to the width of the error-band at D. In fact, as there is a certain degree of deviation from vertex A to point D, the uncertainty of point D should be larger than that of vertex A. However, the area of and meets , which means that the error-band model is not applicable for simplified linear features. As the same conclusion regarding other uncertainty models for linear features can be obtained in a similar way, the derivation process is not shown in this paper.
Almost all uncertainty models use error at a certain confidence level with a distribution that is approximately normal to record spatial uncertainty. Let be a vertex in a linear feature in 2-D GIS and be the corresponding vertex in the simplified feature, where stands for error in the x direction, stands for error in the y direction, and stands for the correlation coefficient between .
Thus, the probability density function(pdf) of
:
meets
To ensure the same structure of uncertainty model between
and
, let the pdf of
be
Correspondingly, the marginal probability density functions (mpdf) of
and
are
respectively.
In fact, available GIS uses just one parameter to describe the uncertainty of the point, that is, the long axis of the error ellipse, namely, , where is a corresponding parameter at confidence level .
Obviously, this model of spatial uncertainty is relatively conservative and involves the following assumptions:
The uncertainties in the x and y directions are independent of each other, namely, .
The standard deviations in the x and y directions are equal to each other, namely, .
Generally, any point
in a certain linear feature
can be represented as
where
,
is the distance between
and
,
is the length of straight line
,
,
,
are the coordinates of point
, respectively.
According to the error propagation law, the uncertainty of point
meets
In consideration of the assumptions widely adopted in spatial uncertainty models, every vertex in the same linear feature follows the same pdf, which meets the attributes of isotropy, namely,
Thus, if
is the standard error of vertices in linear feature
, the uncertainty of any point in
can be simplified as
Therefore, any point
in linear feature
meets
The spatial uncertainty model can be divided into the following categories according to the different values of k as shown in
Table 3.
In the real GIS environment, the value of k usually is set to 3 [
28,
29]; therefore, this paper uses limit error to measure the spatial uncertainty.
According to the basic premise of a 1-D random variable, the radius of the uncertainty area of a 2-D normal random variable (point in 2-D environment) under confidence level
meets:
above can be simplified as according to the limit error model widely adopted in spatial uncertainty models.
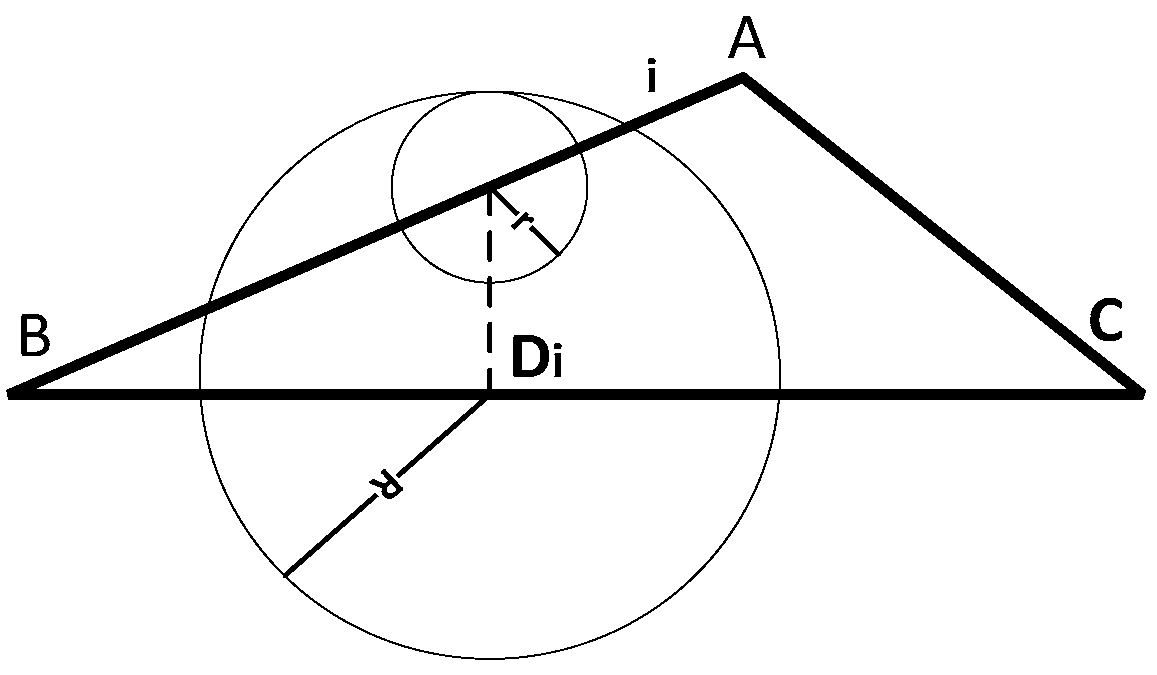
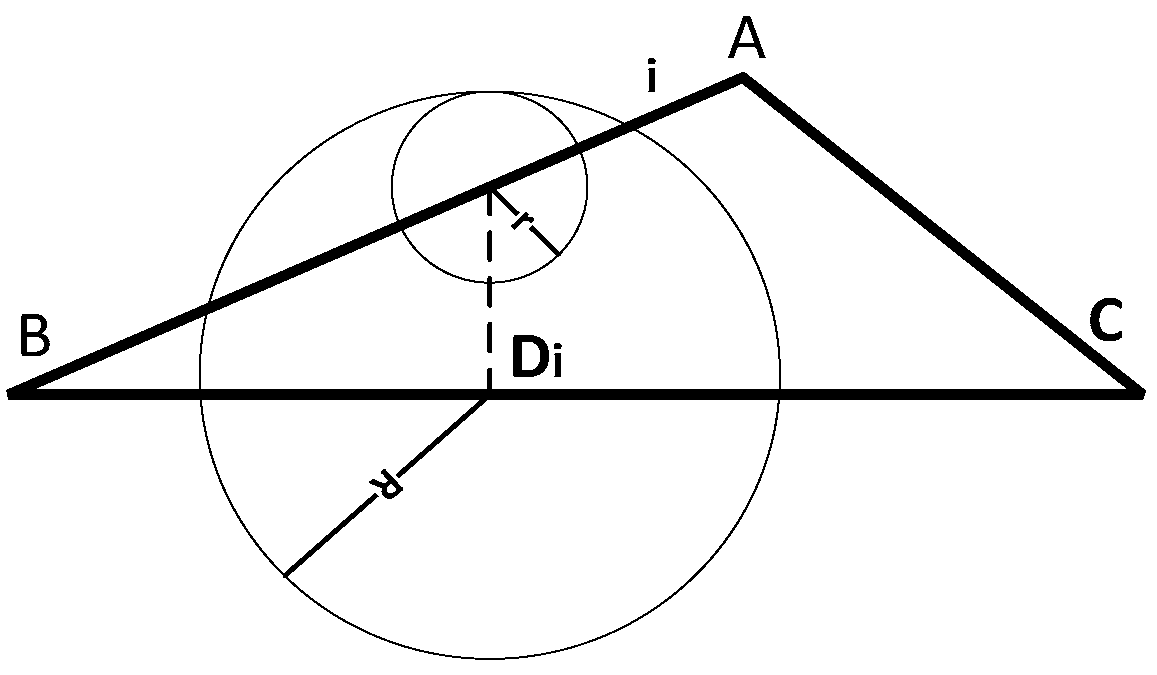
As shown in
Figure 3, the linear feature before simplification is
and the corresponding simplified feature is
. Let
be any point in
,
be the pedal on
of
,
be the circle with the radius
centered on point
.
In consideration of linear feature representing its corresponding geo-spatial entity’s location in the 2-D (or 3-D in 3-D GIS) space, the area inside is the highly probably region (), where the true value of lies. Thus, can be considered an accurate representation of uncertainty within vertex .
Obviously, the uncertainty model for every point
in the simplified linear feature consists of two parts: the relative position relation vector
between
and its corresponding point
and the uncertainty
of point
under a certain confidence level
. Thus, the uncertainty of corresponding point
can be obtained by
where
. As the uncertainty metadata of current spatial data contain only one element, the uncertainty of
can also be the integration of
, namely,
Thus, the average uncertainty of the simplified straight line segment
can be obtained by
where
stands for the total number of points participating the calculation.
In fact, as the circle with the radius centered on point has the attribution of the inclusion of the circle with the radius centered on point , the confidence level corresponding to meets , demonstrating that this uncertainty calculation is a relatively conservative index.
3.4. Uncertainty Assessment of Linear Feature Simplification Based on Hierarchical Representation
As described in
Section 3.2, linear feature
and its simplified version
can be represented as
, respectively.
According to the hierarchical representation of , a comparison between is made following the order of . Let the earliest level of difference be (), with the difference element represented by . Obviously, forms the most abstract different level of and and shows the greatest impact on simplification of to . Further, the subtree of must be different, which has a lesser impact than ; thus, the assessment terminates at .
Let the parent node of be . Obviously, we have and
Depending on relationship between , that is, whether proposition is true or not, the condition can be divided to 2 cases:
Case 1. . In this case, the simplified linear feature has a loss of partial feature vertices in level , resulting in being null (its parent node being a leaf node). The formal description as follows: , meets the following:
Thus, the computation of spatial uncertainty can be transformed into a typical 1: n relationship between and its child nodes.
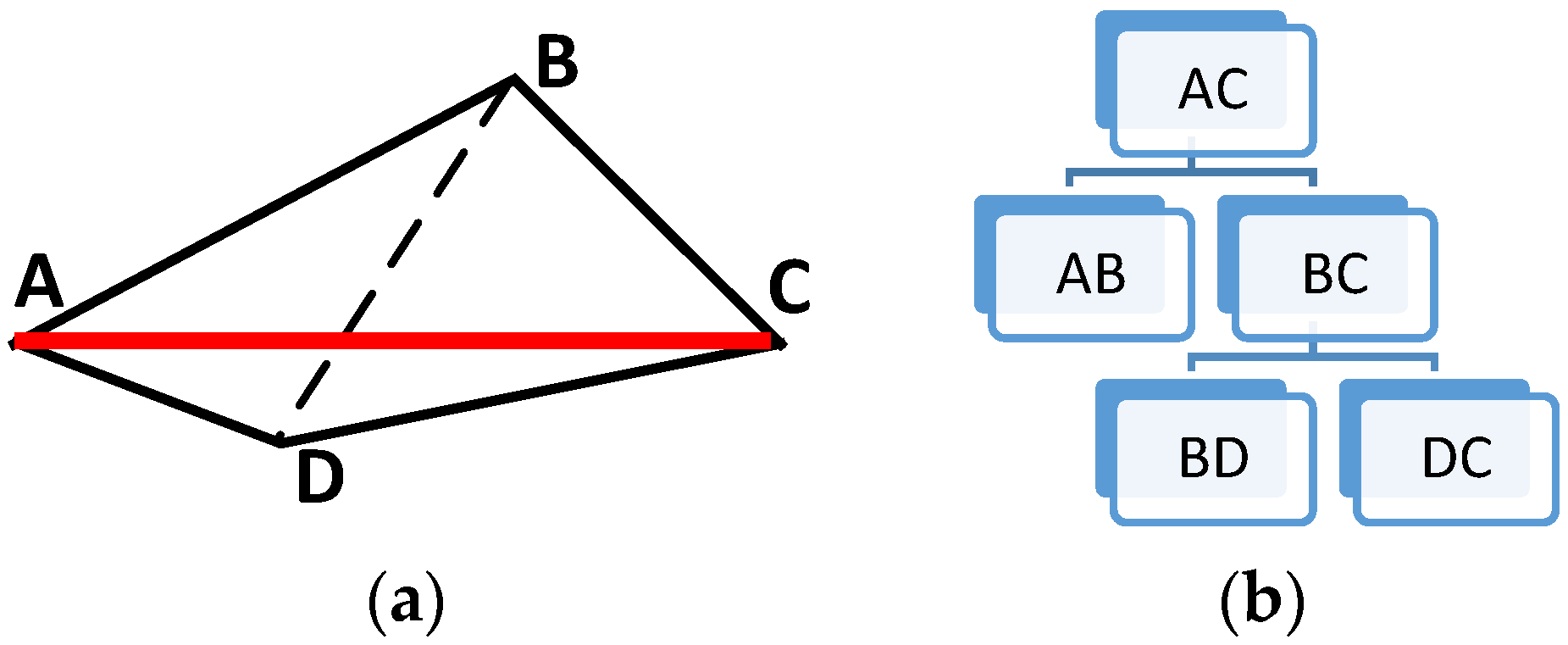
A diagram of Case 1 is given in
Figure 3. In the diagram, leaf node
is represented by straight line segment BC, while in the same node in the corresponding DMC-Tree of the original linear feature,
has child nodes BA and AC. Thus, the computation of uncertainty caused by simplification can be transformed to the difference from BA and AC to the single straight line segment BC.
By regarding line segments BAC and BC as innumerable points, we can construct the mapping relation between them. For any point in BAC, its corresponding point is its pedal in a vertical line normal to BC. Obviously, the length of straight line segment is equal to the distance between point and straight line through BC. With circle with the radius representing its spatial uncertainty, centered on point , the spatial uncertainty of point is then the minimum radius of circle centered on point meeting .
Thus, the average spatial uncertainty of node BC in DMC-Tree can be computed as
where
n is the total number of points in BC.
Case 2. . In this case, the simplified linear feature has some different vertices with in level , while is not a leaf node.
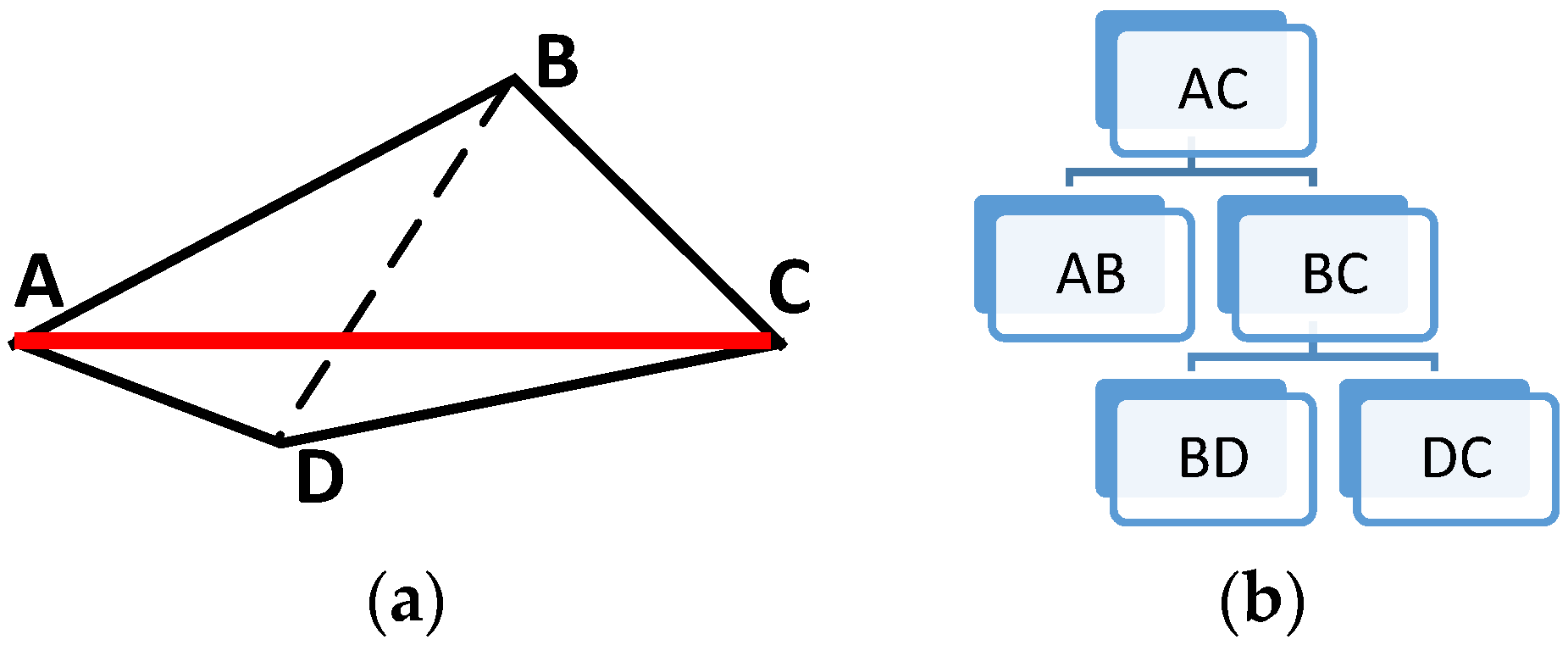
A diagram of Case 2 is given in
Figure 4, where the original curve is ABDC.
In
Figure 4, line segment AB, BC represents
, and AD, DC represents
. The simplification of linear feature
losses feature vertex B in level
, resulting in D as its corresponding vertice, while in the original linear feature, D exists in a deeper level.
Obviously, as a result of the difference between characteristic points (B, D), the morphological difference here is larger than that in Case 1. When the same method in Case 1 is used to construct the mapping relation between ABC and ADC, there may be some points in ABC with no corresponding points in ADC.
The computation of spatial uncertainty in Case 2 is given below:
Thus, the average spatial uncertainty of simplified line ADC can be computed as
where
m is the total number of points in AC.
At this point, the transformation of spatial uncertainty caused by simplification in a certain level of DMC-Tree is complete. For the computation of the whole linear feature, answers of all levels should be integrated together.
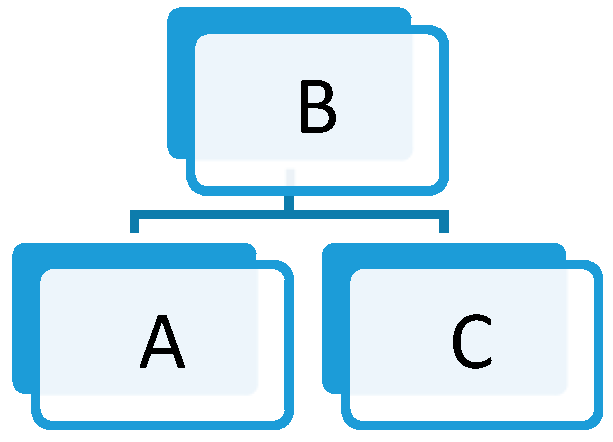
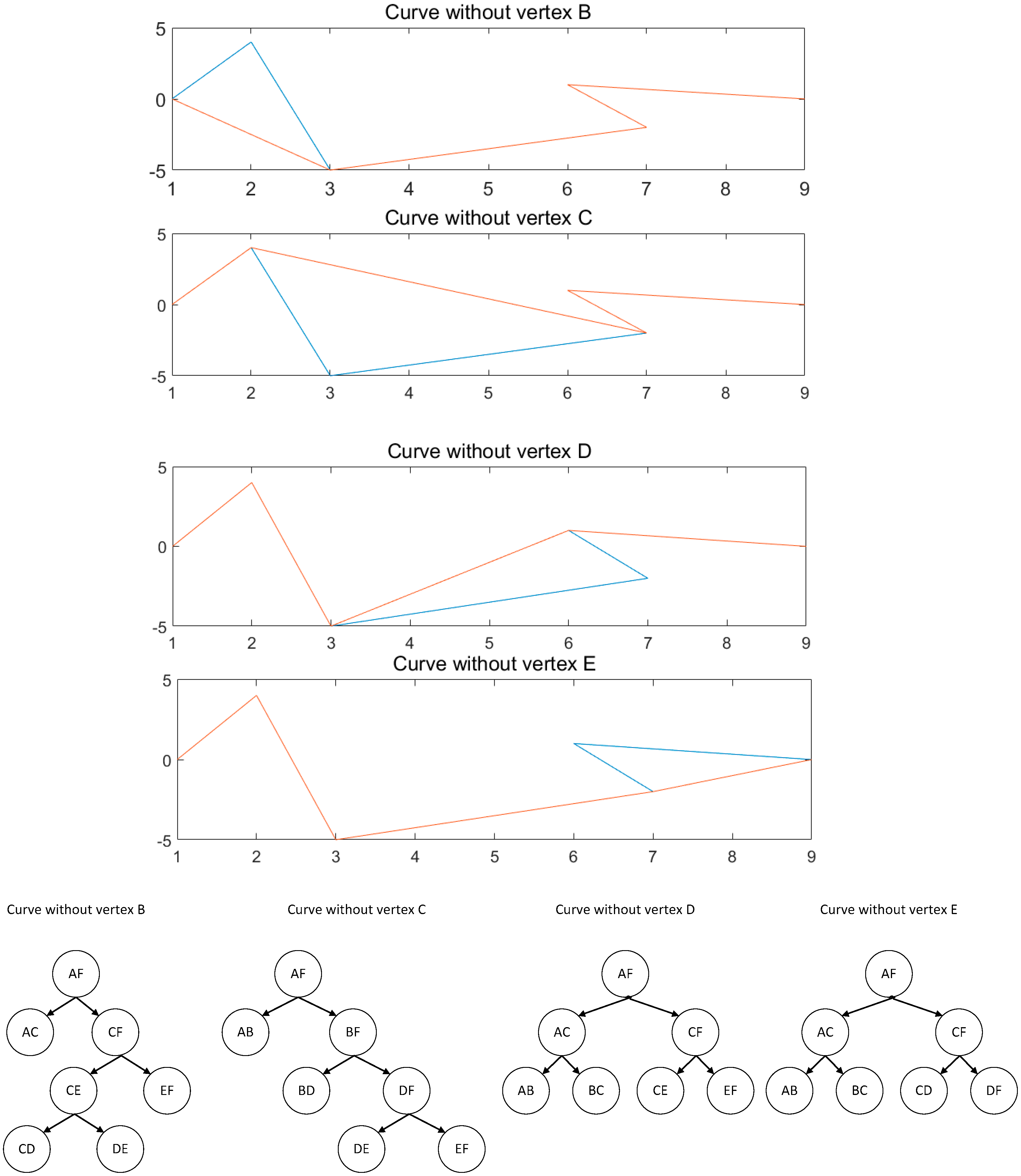
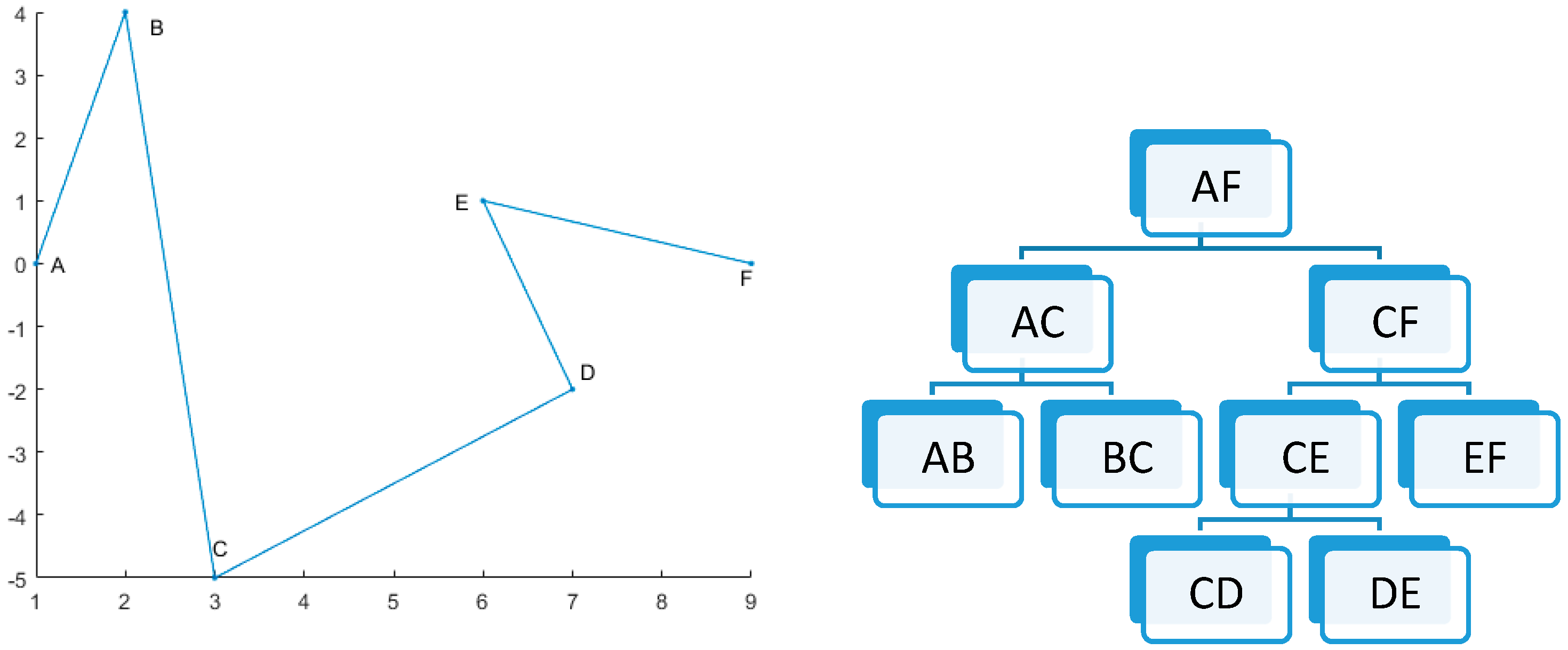
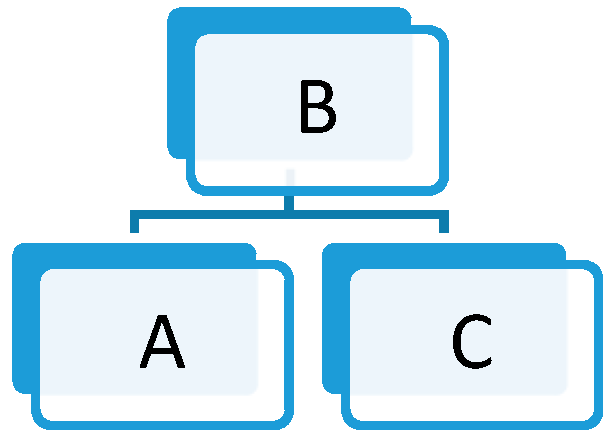
A typical structure in a DMC-Tree is shown in
Figure 5.
Let be the length of straight line segment B. Considering the geographical feature of the linear feature and the hierarchical structure of its corresponding DMC-Tree, the longer the straight line segment is, as well as the higher the level is, the more important it is in GIS databases and products. As a result, the weight assignment model is designed as follows:
The weight of root node is set to be 1.
Weights of child nodes are inherited from their parent node.
Weights between sibling nodes are prorated by their length.
As for the upper diagram, we have







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}