
Upscaling of Surface Soil Moisture Using a Deep Learning Model with VIIRS RDR



Abstract
:1. Introduction
2. Study Area and Data
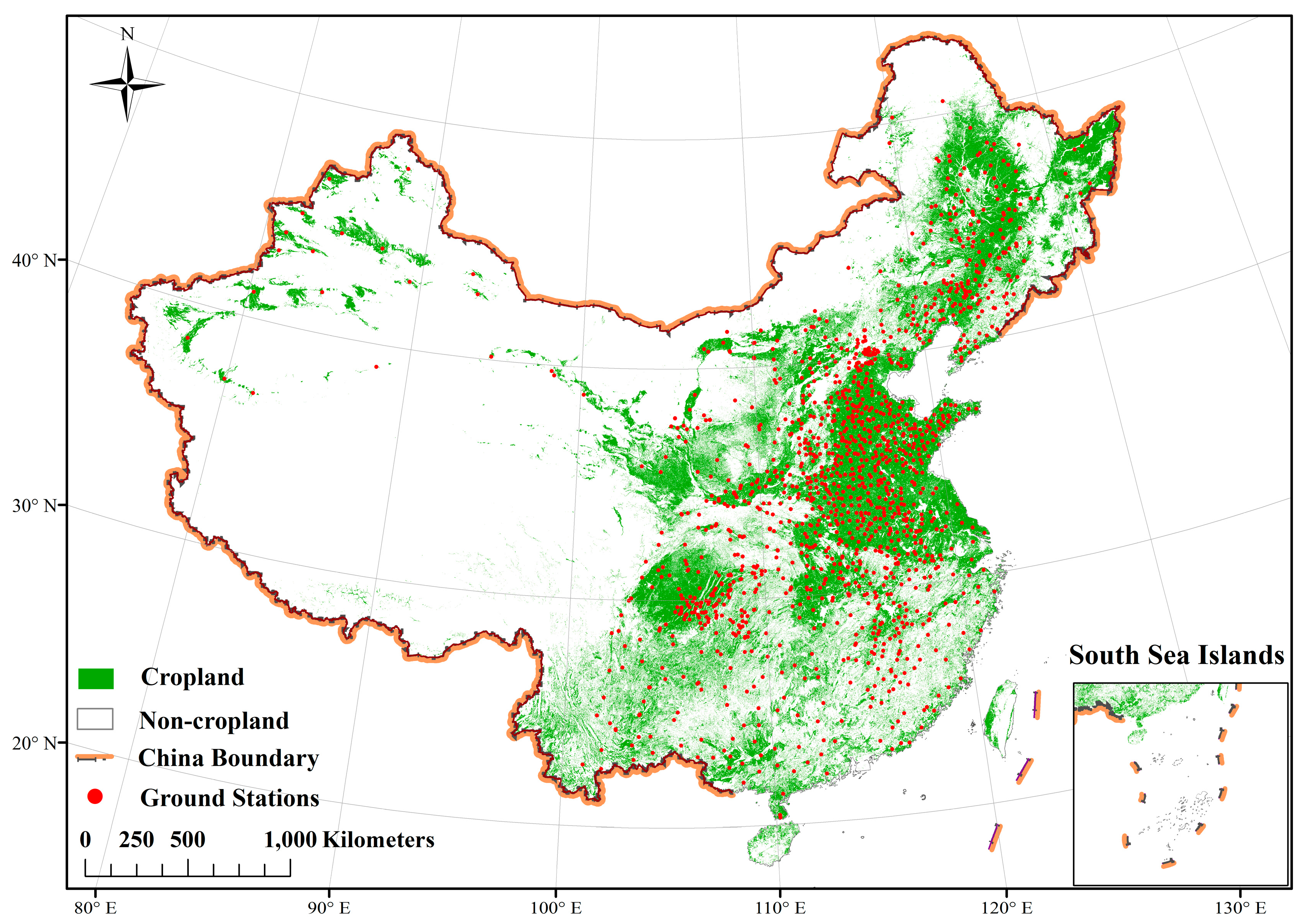
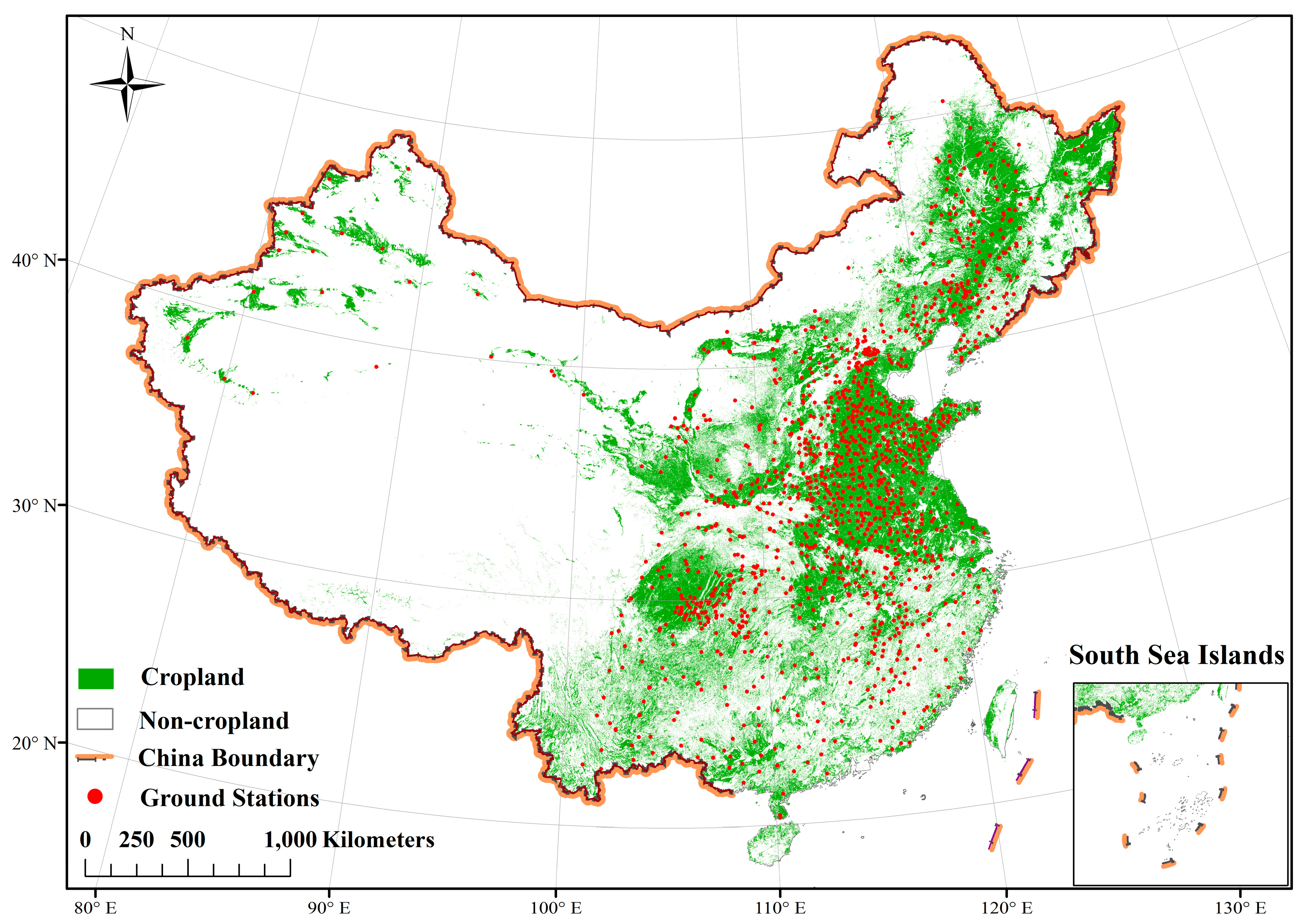
2.1. Study Area
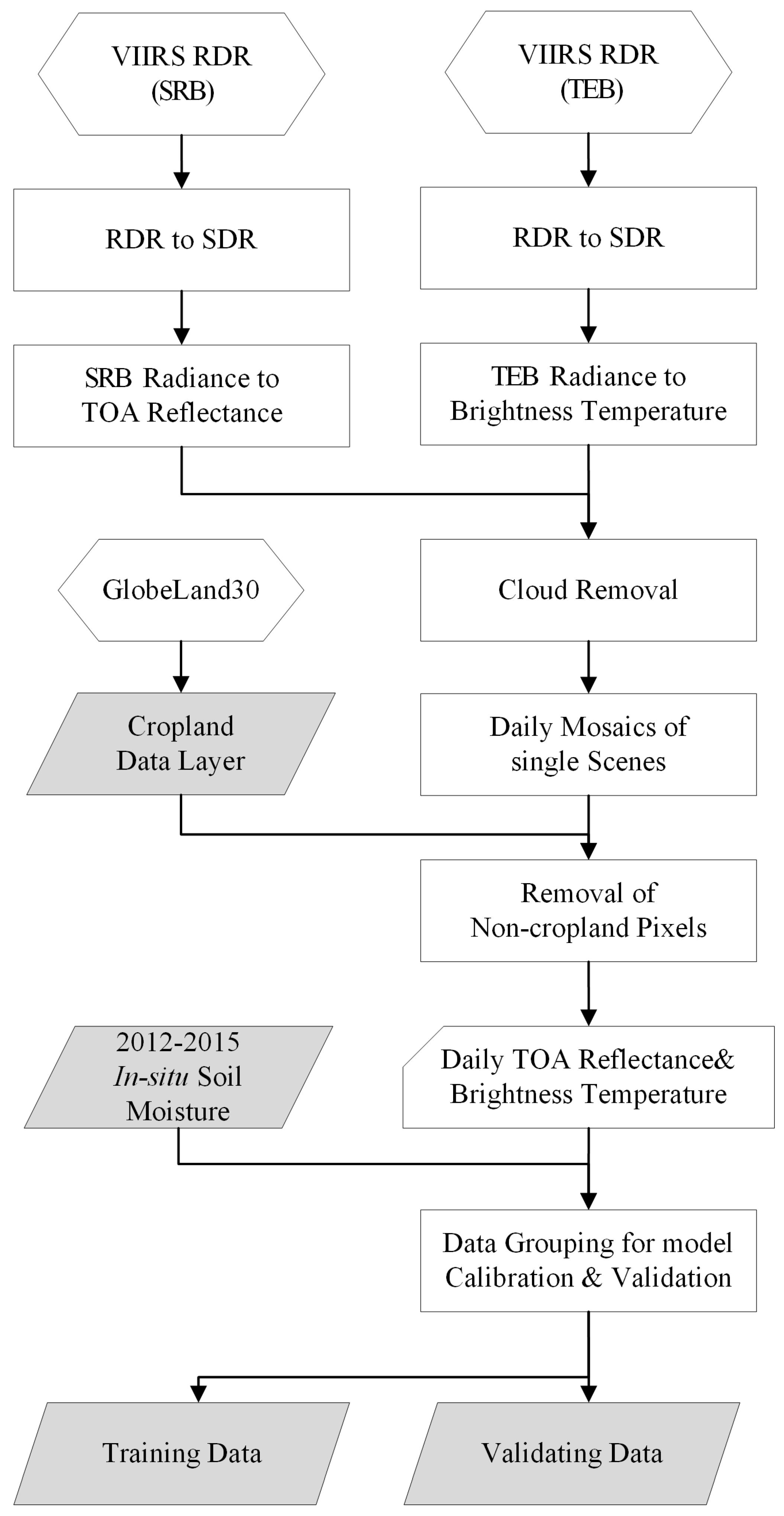
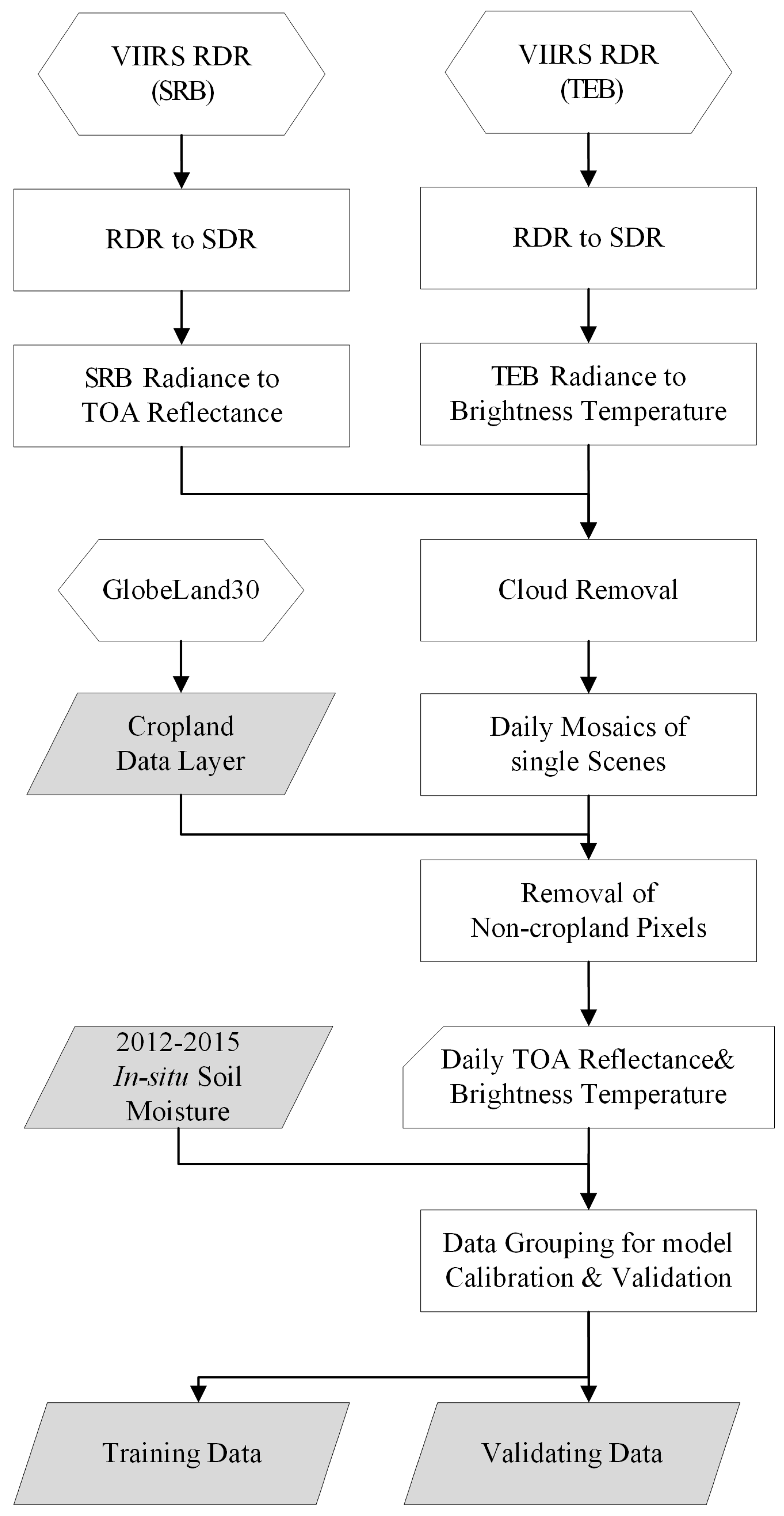
2.2. Data
3. Methodology
3.1. Input Parameters of Soil Moisture Estimation Models
- MODEL I:
- MODEL II:
- MODEL III:
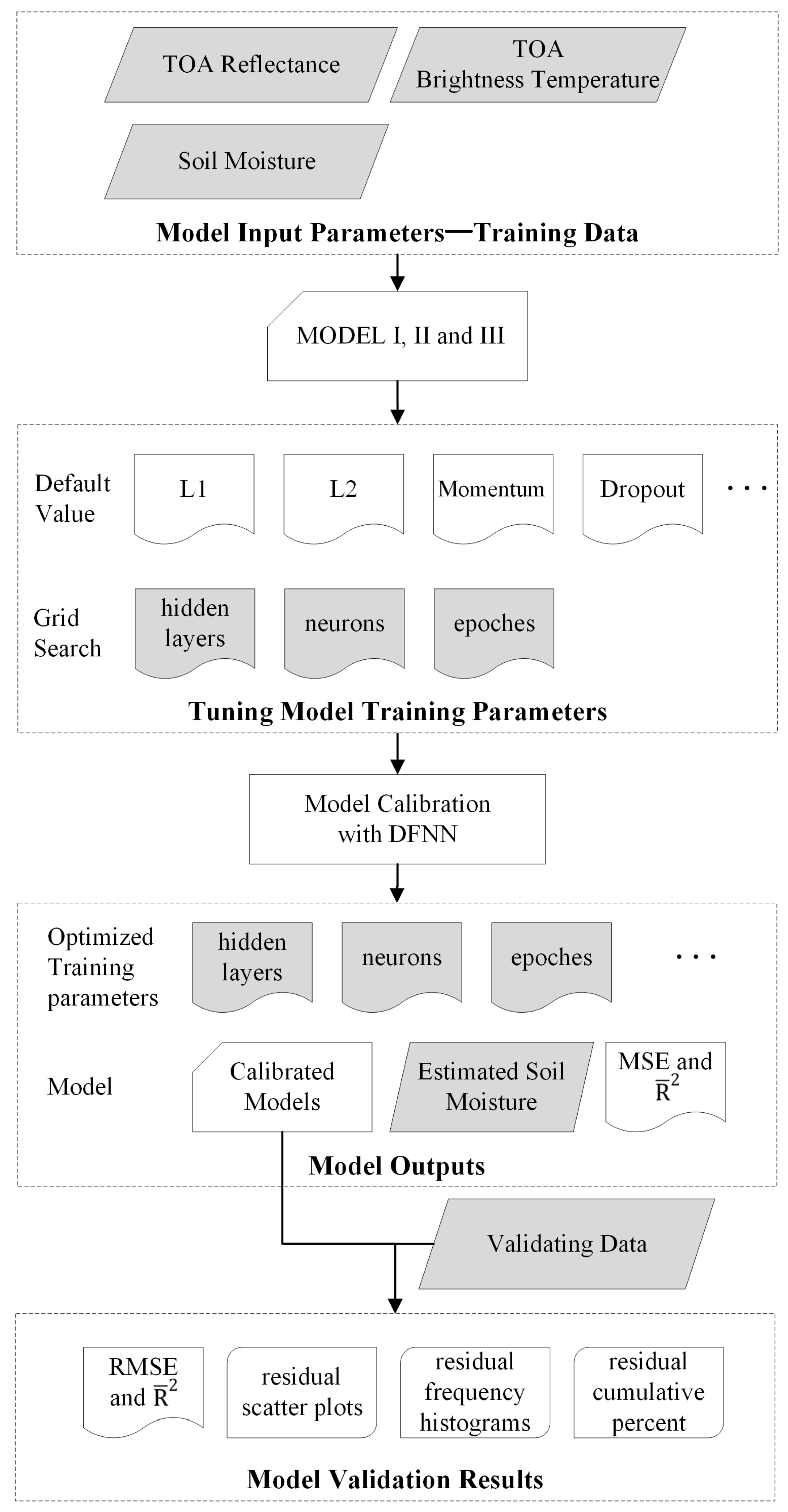
3.2. Model Building Using Deep Learning
4. Results and Discussion
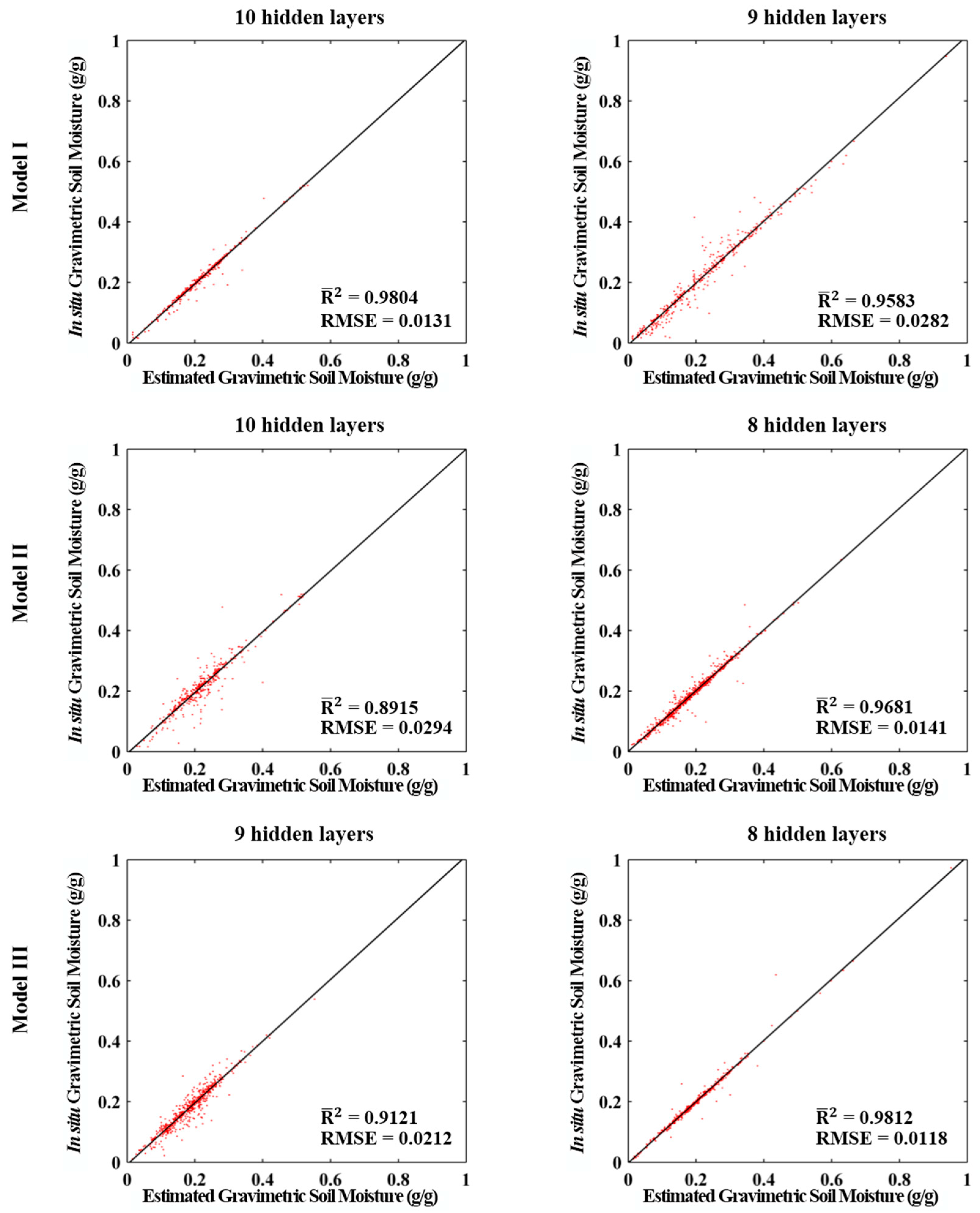
4.1. Model Calibration Using DFNN
4.2. Model Validation Using In Situ soil Moisture
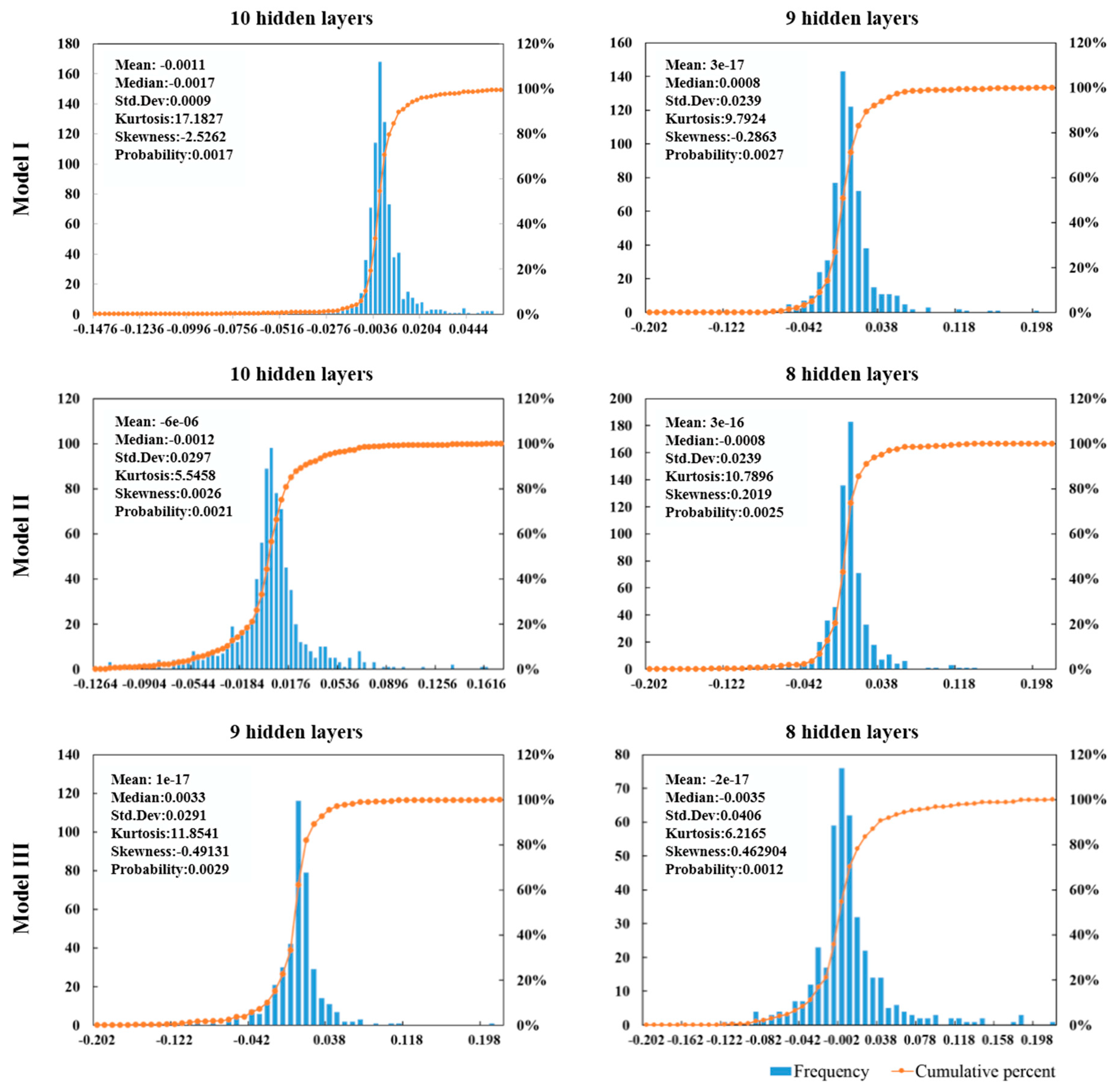
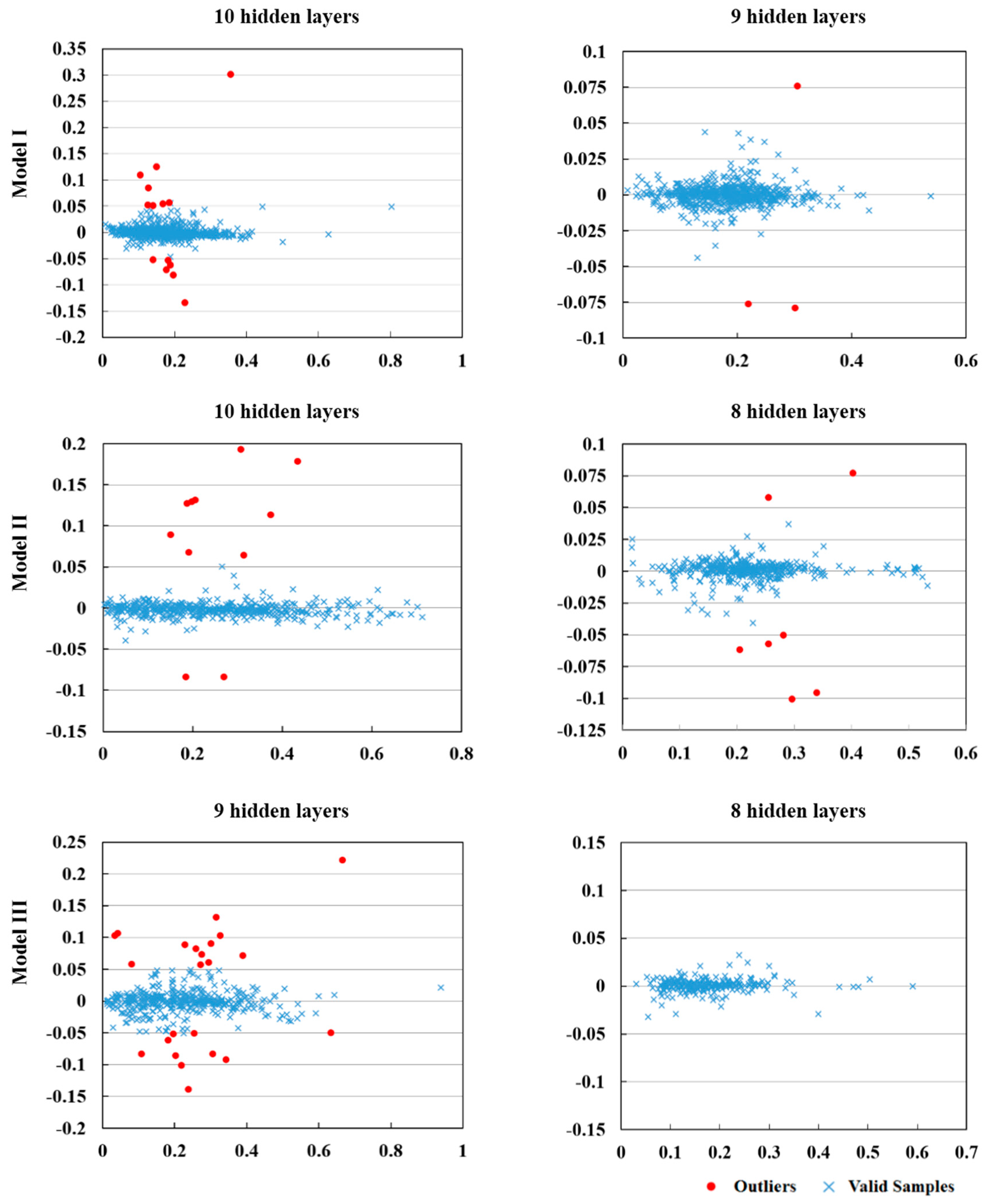
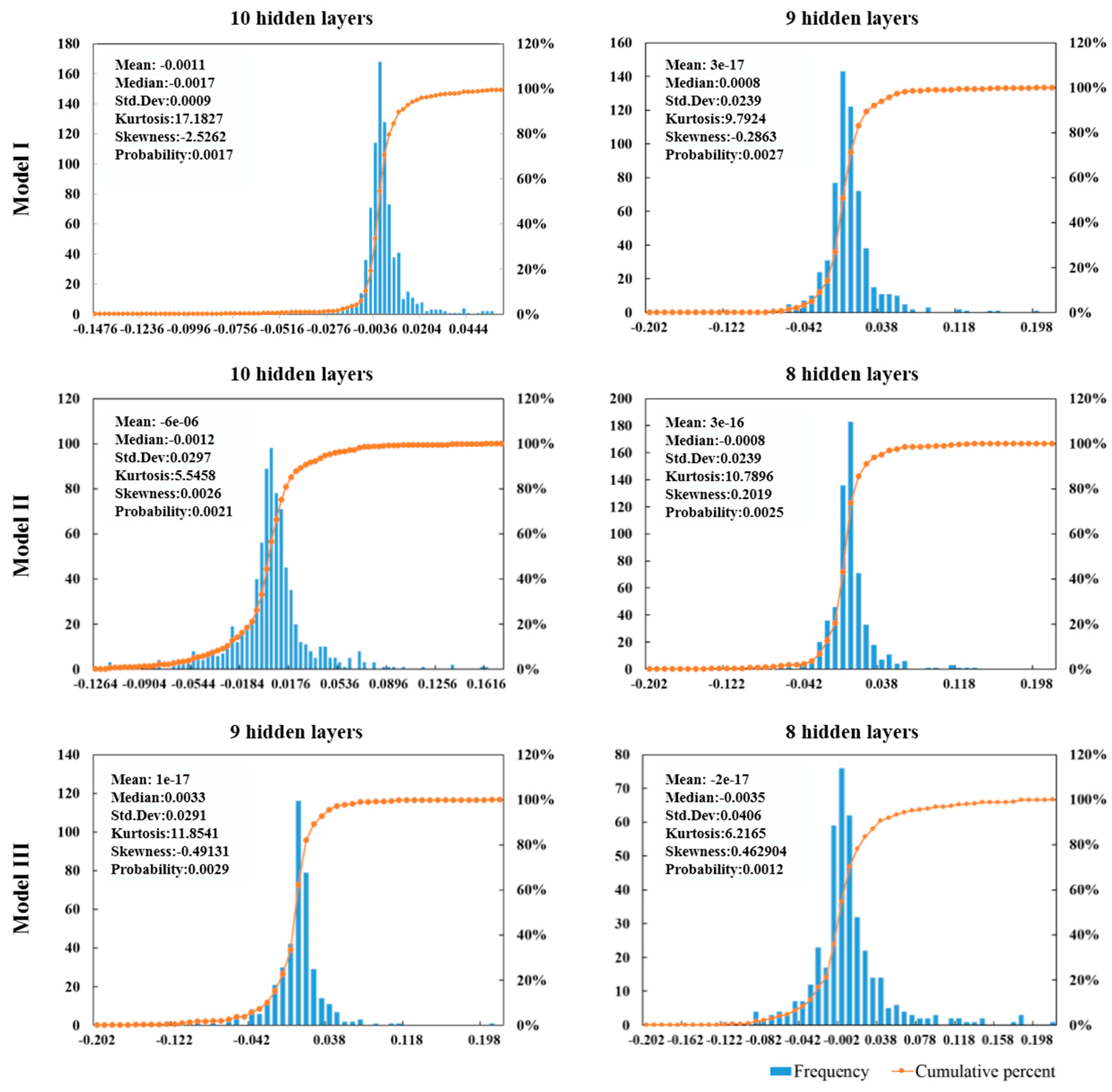
4.3. Residual Analysis
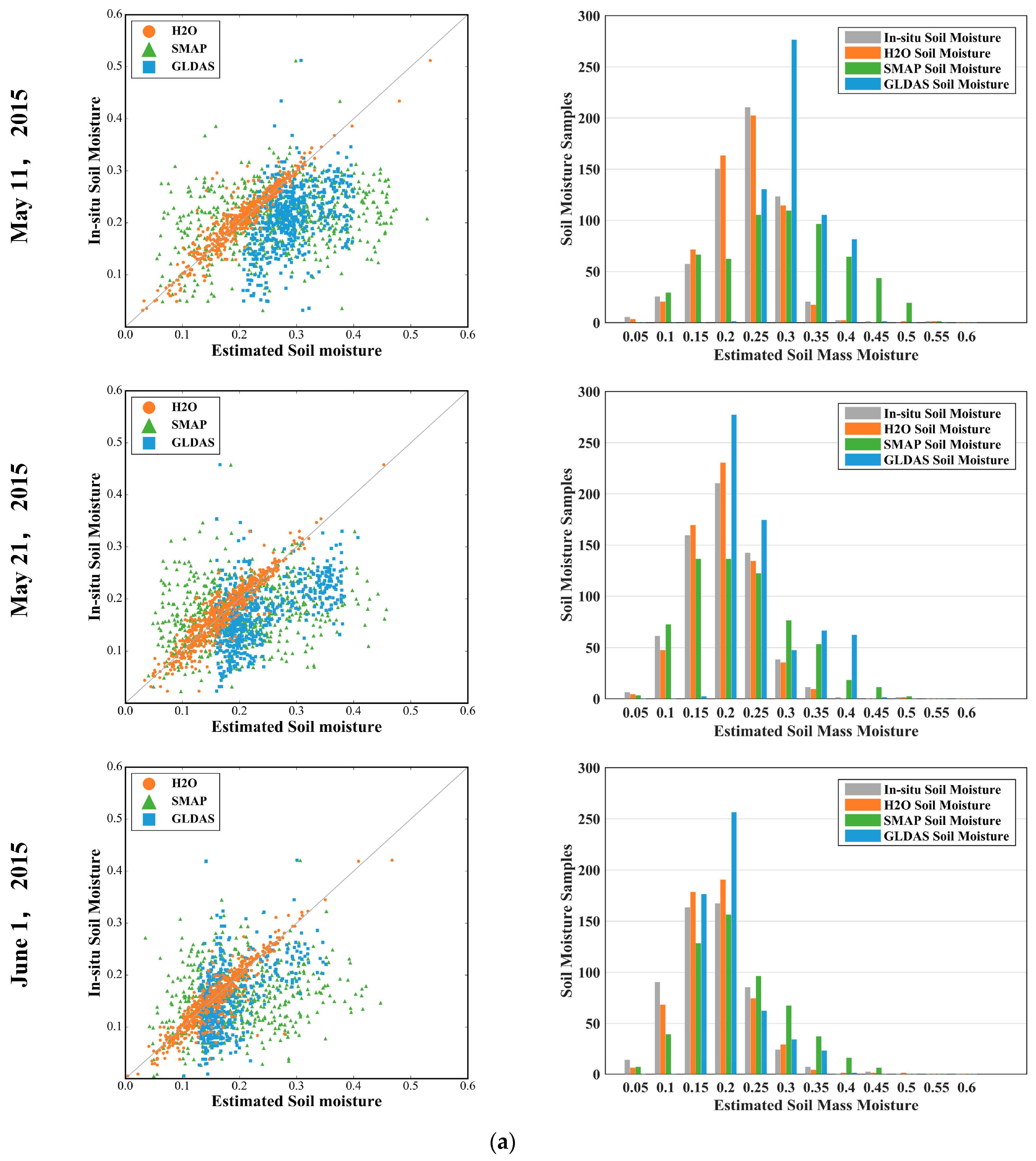
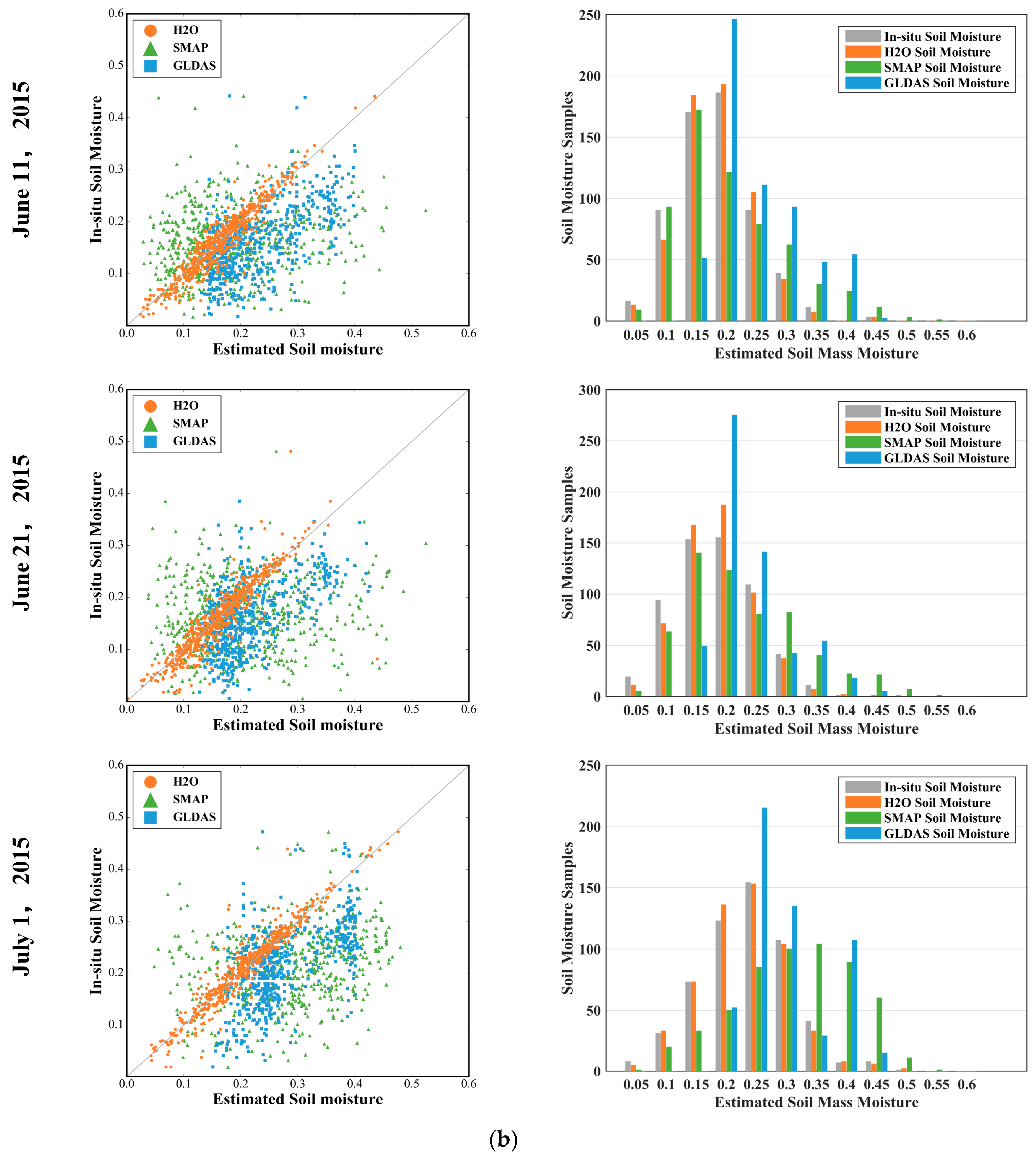
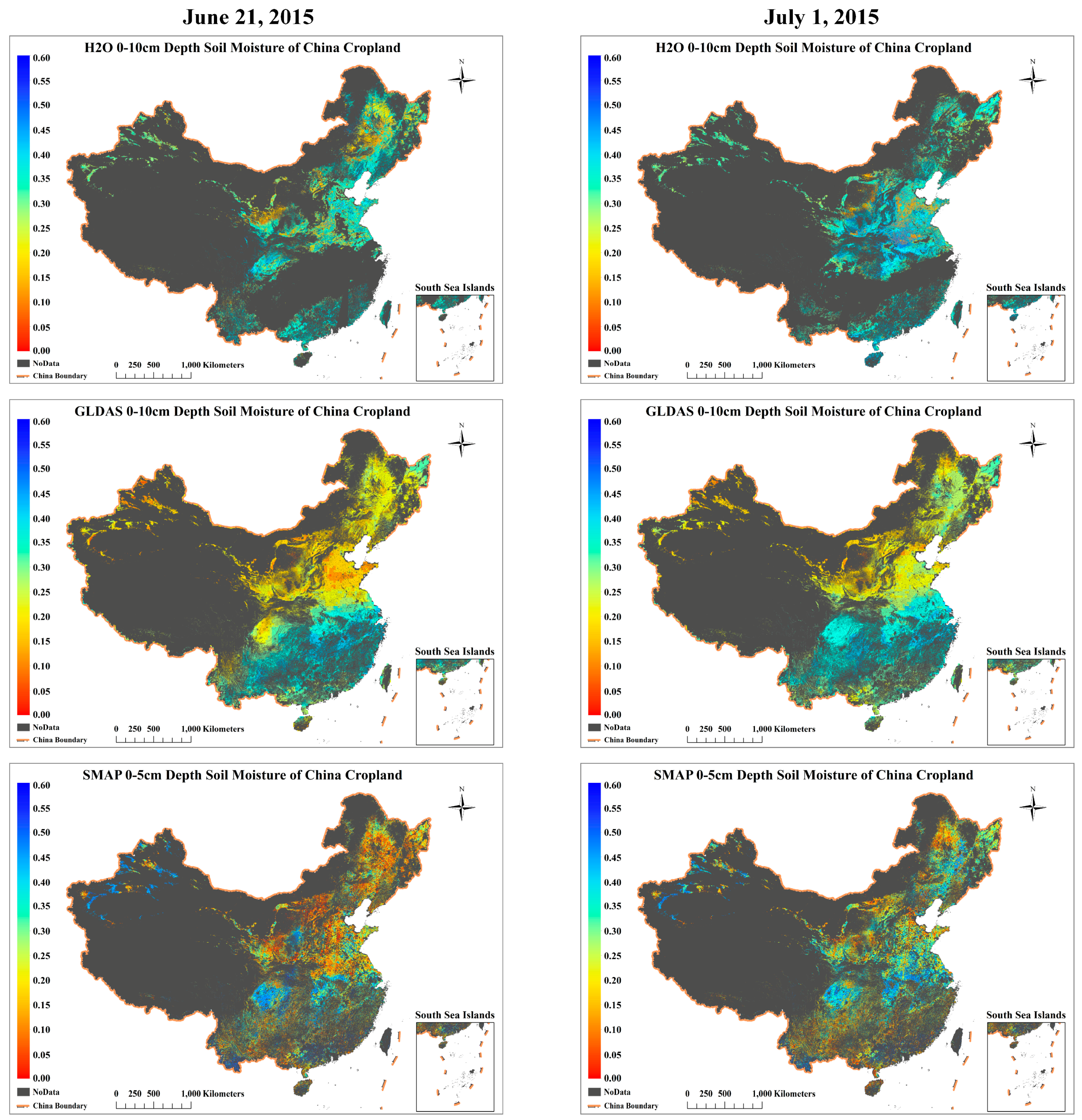
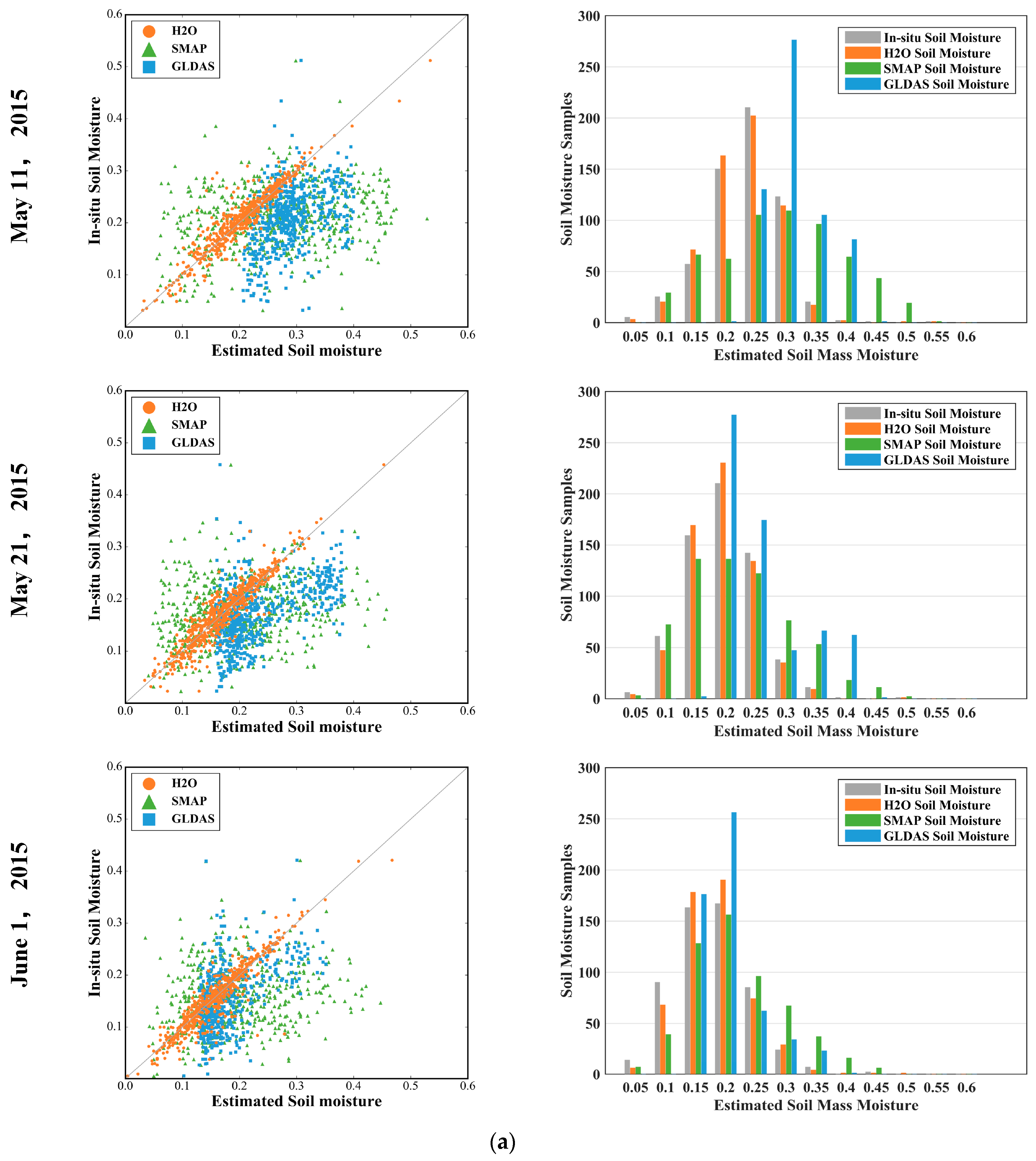
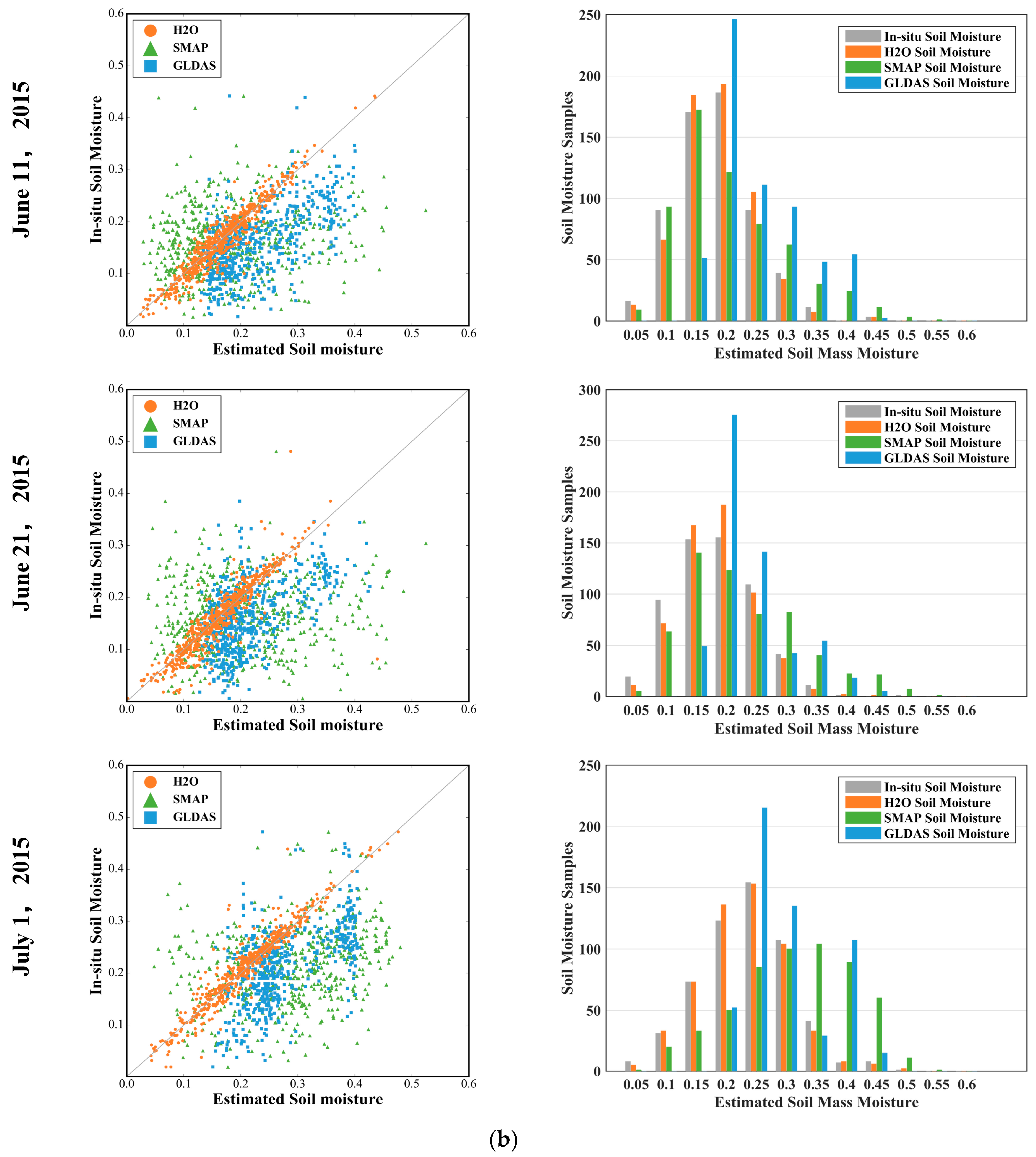
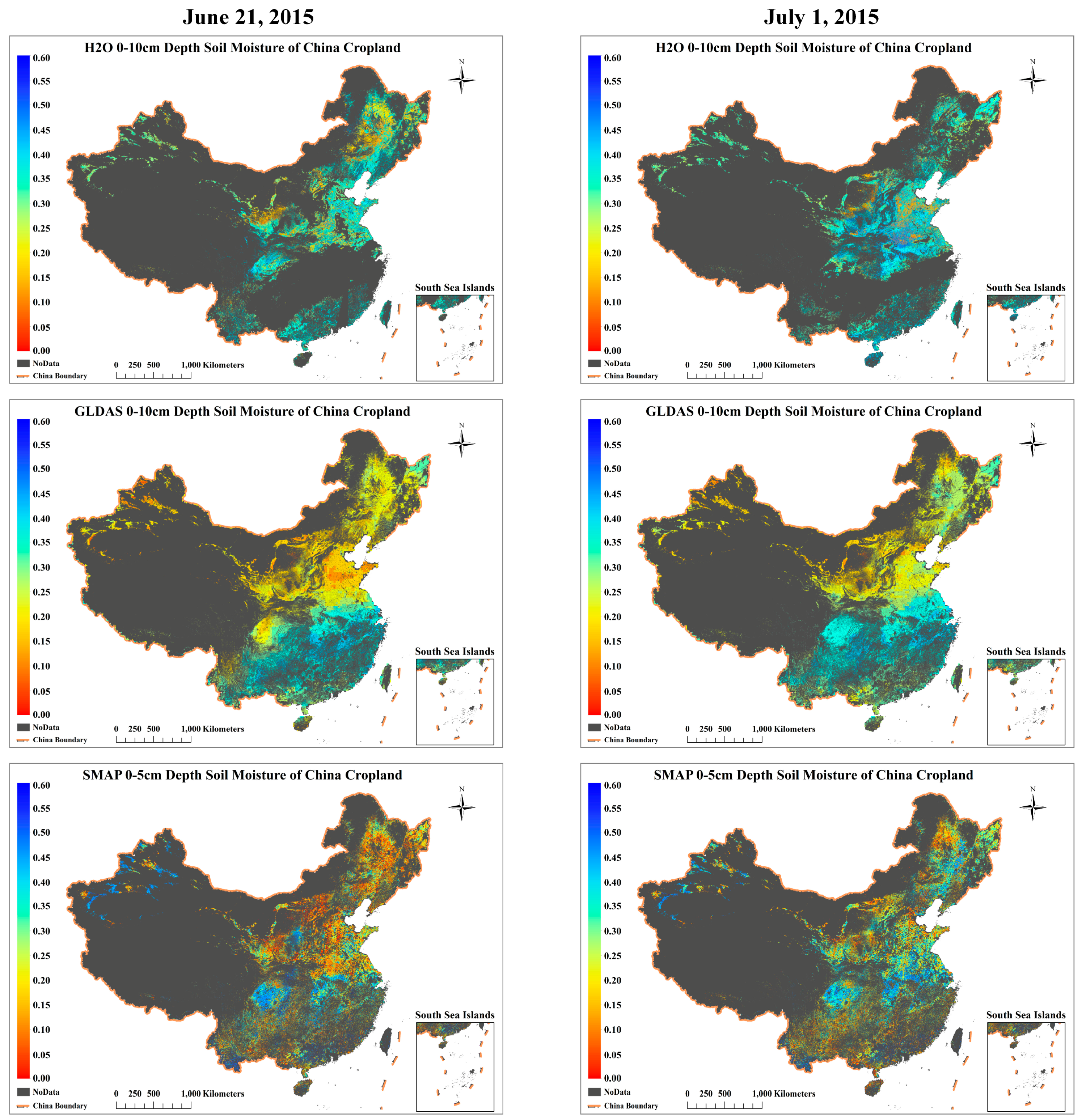
4.4. Comparison with SMAP and GLDAS Soil Moisture Product
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, F.; Mitchell, K.; Schaake, J.; Xue, Y.; Pan, H.L.; Koren, V.; Duan, Q.Y.; Ek, M.; Betts, A. Modeling of land surface evaporation by four schemes and comparison with fife observations. J. Geophys. Res. Atmos. 1996, 101, 7251–7268. [Google Scholar] [CrossRef]
- Wang, L.; Qu, J.J. Satellite remote sensing applications for surface soil moisture monitoring: A review. Front. Earth Sci. China 2009, 3, 237–247. [Google Scholar] [CrossRef]
- Lakshmi, V. Remote sensing of soil moisture. ISRN Soil Sci. 2013, 2013. [Google Scholar] [CrossRef]
- Fang, B.; Lakshmi, V. Soil moisture at watershed scale: Remote sensing techniques. J. Hydrol. 2014, 516, 258–272. [Google Scholar] [CrossRef]
- Petropoulos, G.P. Remote Sensing of Energy Fluxes and Soil Moisture Content; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Engman, E.T. Applications of microwave remote sensing of soil moisture for water resources and agriculture. Remote Sens. Environ. 1991, 35, 213–226. [Google Scholar] [CrossRef]
- Wagner, W.; Naeimi, V.; Scipal, K.; de Jeu, R.; Martínez-Fernández, J. Soil moisture from operational meteorological satellites. Hydrogeol. J. 2007, 15, 121–131. [Google Scholar] [CrossRef]
- Cai, X.; Pan, M.; Chaney, N.W.; Colliander, A.; Misra, S.; Cosh, M.H.; Crow, W.T.; Jackson, T.J.; Wood, E.F. Validation of smap soil moisture for the smapvex15 field campaign using a hyper-resolution model. Water Resour. Res. 2017. [Google Scholar] [CrossRef]
- Qin, J.; Zhao, L.; Chen, Y.; Yang, K.; Yang, Y.; Chen, Z.; Lu, H. Inter-comparison of spatial upscaling methods for evaluation of satellite-based soil moisture. J. Hydrol. 2015, 523, 170–178. [Google Scholar] [CrossRef]
- Carlson, T. An overview of the “triangle method” for estimating surface evapotranspiration and soil moisture from satellite imagery. Sensors 2007, 7, 1612–1629. [Google Scholar] [CrossRef]
- Wang, L.; Qu, J.; Zhang, S.; Hao, X.; Dasgupta, S. Soil moisture estimation using modis and ground measurements in eastern china. Int. J. Remote Sens. 2007, 28, 1413–1418. [Google Scholar] [CrossRef]
- Vinnikov, K.Y.; Robock, A.; Qiu, S.; Entin, J.K. Optimal design of surface networks for observation of soil moisture. J. Geophys. Res. 1999, 1041, 19743–19750. [Google Scholar] [CrossRef]
- Wang, J.; Ge, Y.; Song, Y.; Li, X. A geostatistical approach to upscale soil moisture with unequal precision observations. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2125–2129. [Google Scholar] [CrossRef]
- Qin, J.; Yang, K.; Lu, N.; Chen, Y.; Zhao, L.; Han, M. Spatial upscaling of in-situ soil moisture measurements based on modis-derived apparent thermal inertia. Remote Sens. Environ. 2013, 138, 1–9. [Google Scholar] [CrossRef]
- De Rosnay, P.; Gruhier, C.; Timouk, F.; Baup, F.; Mougin, E.; Hiernaux, P.; Kergoat, L.; LeDantec, V. Multi-scale soil moisture measurements at the gourma meso-scale site in mali. J. Hydrol. 2009, 375, 241–252. [Google Scholar] [CrossRef]
- Ahmad, S.; Kalra, A.; Stephen, H. Estimating soil moisture using remote sensing data: A machine learning approach. Adv. Water Resour. 2010, 33, 69–80. [Google Scholar] [CrossRef]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [PubMed]
- Salakhutdinov, R.; Hinton, G. Semantic hashing. Int. J. Approx. Reason. 2009, 50, 969–978. [Google Scholar] [CrossRef]
- Ciresan, D.; Meier, U.; Schmidhuber, J. Multi-column deep neural networks for image classification. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), IEEE, Washington, DC, USA, 16–21 June 2012; pp. 3642–3649. [Google Scholar]
- Chen, Y.; Lin, Z.; Zhao, X.; Wang, G.; Gu, Y. Deep learning-based classification of hyperspectral data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2094–2107. [Google Scholar] [CrossRef]
- Zou, Q.; Ni, L.; Zhang, T.; Wang, Q. Deep learning based feature selection for remote sensing scene classification. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2321–2325. [Google Scholar] [CrossRef]
- Kühnlein, M.; Appelhans, T.; Thies, B.; Nauss, T. Improving the accuracy of rainfall rates from optical satellite sensors with machine learning—A random forests-based approach applied to msg seviri. Remote Sens. Environ. 2014, 141, 129–143. [Google Scholar] [CrossRef]
- Cao, C.; Xiong, X.; Wolfe, R.; DeLuccia, F.; Liu, Q.; Blonski, S.; Lin, G.; Nishihama, M.; Pogorzala, D.; Oudrari, H. Visible Infrared Imaging Radiometer Suite (Viirs) Sensor Data Record (sdr) User’s Guide; Version 1.2; NOAA Technical Report NESDIS: Washington, DC, USA, 2013; Volume 142, p. 15.
- Jun, C.; Ban, Y.; Li, S. China: Open access to earth land-cover map. Nature 2014, 514, 434. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Chen, J.; Liao, A.; Cao, X.; Chen, L.; Chen, X.; He, C.; Han, G.; Peng, S.; Lu, M. Global land cover mapping at 30 m resolution: A pok-based operational approach. ISPRS J. Photogramm. Remote Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef]
- Li, Z.; Tan, D. The second modified perpendicular drought index (mpdi1): A combined drought monitoring method with soil moisture and vegetation index. J. Indian Soc. Remote Sens. 2013, 41, 873–881. [Google Scholar] [CrossRef]
- Xiong, X.; Butler, J.J.; Chiang, K.; Efremova, B.; Fulbright, J.P.; Lei, N.; Mcintire, J.; Oudrari, H.; Sun, J.; Wang, Z. Viirs on-orbit calibration methodology and performance. J. Geophys. Res. 2014, 119, 5065–5078. [Google Scholar] [CrossRef]
- China’s Ministry of Water Resources (MWR). Technical Standard for Soil Moisture Monitoring; China Water Power Press: Beijing, China, 2015.
- Shen, Y.; Zhao, P.; Pan, Y.; Yu, J. A high spatiotemporal gauge-satellite merged precipitation analysis over china. J. Geophys. Res. Atmos. 2014, 119, 3063–3075. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J. The soil moisture active passive (smap) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Rui, H.; Beaudoing, H. Readme Document for Global Land Data Assimilation System Version 2 (Gldas-2) Products; GES DISC: Greenbelt, MD, USA, 2011.
- Lobell, D.B.; Asner, G.P. Moisture effects on soil reflectance. Soil Sci. Soc. Am. J. 2002, 66, 722–727. [Google Scholar] [CrossRef]
- Lakshmi, V.; Jackson, T.J.; Zehrfuhs, D. Soil moisture–temperature relationships: Results from two field experiments. Hydrol. Process. 2003, 17, 3041–3057. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and expansion of the fmask algorithm: Cloud, cloud shadow, and snow detection for landsats 4–7, 8, and sentinel 2 images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Candel, A.; Parmar, V.; LeDell, E.; Arora, A. Deep Learning with H2O; H2O. ai Inc.: Mountain View, CA, USA, 2016. [Google Scholar]
- Bengio, Y.; Courville, A.C.; Vincent, P. Representation learning: A review and new perspectives. IEEE Trans. Pattern Analys. Mach. Intell. 2013, 35, 1798–1828. [Google Scholar] [CrossRef] [PubMed]
- Larochelle, H.; Erhan, D.; Courville, A.; Bergstra, J.; Bengio, Y. An empirical evaluation of deep architectures on problems with many factors of variation. In Proceedings of the 24th International Conference on Machine Learning, Corvallis, OR, USA, 20–24 June 2007; ACM: New York, NY, USA; pp. 473–480. [Google Scholar]
- Jarque, C.M.; Bera, A.K. A test for normality of observations and regression residuals. Int. Stat. Rev. 1987, 55, 163–172. [Google Scholar] [CrossRef]
- Erhan, D.; Manzagol, P.-A.; Bengio, Y.; Bengio, S.; Vincent, P. The difficulty of training deep architectures and the effect of unsupervised pre-training. In Proceedings of the International Conference on Artificial Intelligence and Statistics, Clearwater Beach, FL, USA, 16–18 April 2009; pp. 153–160. [Google Scholar]
- Wagner, W.; Lemoine, G.; Rott, H. A method for estimating soil moisture from ers scatterometer and soil data. Remote Sens. Environ. 1999, 70, 191–207. [Google Scholar] [CrossRef]
- Pan, M.; Cai, X.; Chaney, N.W.; Entekhabi, D.; Wood, E.F. An initial assessment of smap soil moisture retrievals using high-resolution model simulations and in situ observations. Geophys. Res. Lett. 2016, 43, 9662–9668. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band Number (VIIRS) | Central Wavelength (nm) | Wavelength Range (nm) | Signal to Noise Ratio (SNR) or Noise Equivalent Differential Temperature (NEdT) (18 March 2013) |
|---|---|---|---|
| M1 | 412 | 402–422 | 1.72 |
| M2 | 445 | 436–454 | 1.56 |
| M3 | 488 | 478–498 | 1.54 |
| M4 | 555 | 545–565 | 1.50 |
| M5 | 672 | 662–682 | 1.30 |
| M6 | 746 | 739–754 | 1.69 |
| M7 | 865 | 846–885 | 1.80 |
| M8 | 1240 | 1230–1250 | 2.60 |
| M9 | 1378 | 1371–1386 | 2.47 |
| M10 | 1610 | 1580–1640 | 1.60 |
| M11 | 2250 | 2230–2280 | 2.14 |
| M12 | 3700 | 3610–3790 | 0.30 |
| M13 | 4050 | 3970–4130 | 0.37 |
| M14 | 8550 | 8400–8700 | 0.66 |
| M15 | 10763 | 10,260–11,260 | 0.43 |
| M16 | 12013 | 11,540–12,490 | 0.42 |
| Hidden Layers | Neurons | Epochs | Samples | Time (s) | MSE | |
|---|---|---|---|---|---|---|
| 11 | 500 | 1000 | 8789 | 2922 | 0.3564 | 0.0107 |
| 11 | 300 | 1000 | 8789 | 4828 | 0.7543 | 0.0066 |
| 10 | 500 | 2000 | 8789 | 4995 | 0.9746 | 0.0003 |
| 10 | 500 | 1500 | 8789 | 7956 | 0.9301 | 0.0007 |
| 10 | 500 | 1000 | 8789 | 6771 | 0.8601 | 0.0008 |
| 9 | 500 | 3500 | 8789 | 3318 | 0.9786 | 0.0002 |
| 9 | 500 | 1500 | 8789 | 2895 | 0.8565 | 0.0008 |
| 9 | 300 | 1000 | 8789 | 2321 | 0.7115 | 0.0015 |
| 8 | 500 | 3500 | 8789 | 1250 | 0.3141 | 0.0453 |
| Hidden Layers | Neurons | Epochs | Samples | Time (s) | MSE | |
|---|---|---|---|---|---|---|
| 10 | 500 | 1300 | 7396 | 3645 | 0.9169 | 0.0005 |
| 10 | 500 | 1200 | 7396 | 2874 | 0.8778 | 0.0008 |
| 10 | 500 | 1000 | 7396 | 2571 | 0.7334 | 0.0011 |
| 9 | 400 | 1300 | 7396 | 3016 | 0.6142 | 0.0065 |
| 9 | 400 | 1200 | 7396 | 2268 | 0.8303 | 0.0011 |
| 9 | 400 | 1000 | 7396 | 1728 | 0.7492 | 0.0016 |
| 8 | 500 | 3600 | 7396 | 3350 | 0.5141 | 0.0153 |
| 8 | 500 | 3500 | 7396 | 3032 | 0.9851 | 0.00009 |
| 8 | 500 | 3000 | 7396 | 2921 | 0.7115 | 0.0015 |
| Hidden Layers | Neurons | Epochs | Samples | Time (s) | MSE | |
|---|---|---|---|---|---|---|
| 10 | 500 | 1200 | 5928 | 2426 | 0.6232 | 0.0019 |
| 10 | 500 | 1100 | 5928 | 2295 | 0.8365 | 0.0008 |
| 10 | 500 | 1000 | 5928 | 1828 | 0.6764 | 0.0026 |
| 9 | 400 | 1500 | 5928 | 1421 | 0.8115 | 0.0006 |
| 9 | 400 | 1300 | 5928 | 1287 | 0.9215 | 0.0005 |
| 9 | 400 | 1000 | 5928 | 977 | 0.8601 | 0.0008 |
| 8 | 500 | 3600 | 5928 | 3392 | 0.7142 | 0.0051 |
| 8 | 500 | 3500 | 5928 | 3250 | 0.9875 | 0.00007 |
| 8 | 500 | 3000 | 5928 | 2921 | 0.8036 | 0.0007 |
| Samples | p-Value | RMSE (%) | ||
|---|---|---|---|---|
| 11 May 2015 | ||||
| H2O | 594 | 0.8798 | <0.05 | 0.0213 |
| GLDAS | 594 | 0.1638 | <0.05 | 0.0975 |
| SMAP | 594 | 0.0609 | <0.05 | 0.1174 |
| 21 May 2015 | ||||
| H2O | 629 | 0.8671 | <0.05 | 0.0211 |
| GLDAS | 629 | 0.2950 | <0.05 | 0.0840 |
| SMAP | 629 | 0.0491 | <0.05 | 0.0940 |
| 1 June 2015 | ||||
| H2O | 552 | 0.8578 | <0.05 | 0.0228 |
| GLDAS | 552 | 0.2524 | <0.05 | 0.0595 |
| SMAP | 552 | 0.0370 | <0.05 | 0.0959 |
| 11 June 2015 | ||||
| H2O | 605 | 0.9080 | <0.05 | 0.0198 |
| GLDAS | 605 | 0.3518 | <0.05 | 0.0891 |
| SMAP | 605 | 0.0333 | <0.05 | 0.1029 |
| 21 June 2015 | ||||
| H2O | 584 | 0.8233 | <0.05 | 0.0281 |
| GLDAS | 584 | 0.2726 | <0.05 | 0.0811 |
| SMAP | 584 | 0.0078 | <0.05 | 0.1186 |
| 1 July 2015 | ||||
| H2O | 553 | 0.9193 | <0.05 | 0.0217 |
| GLDAS | 553 | 0.3298 | <0.05 | 0.0900 |
| SMAP | 553 | 0.0784 | <0.05 | 0.1274 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, D.; Zhang, W.; Huang, W.; Hong, Z.; Meng, L. Upscaling of Surface Soil Moisture Using a Deep Learning Model with VIIRS RDR. ISPRS Int. J. Geo-Inf. 2017, 6, 130. https://doi.org/10.3390/ijgi6050130
Zhang D, Zhang W, Huang W, Hong Z, Meng L. Upscaling of Surface Soil Moisture Using a Deep Learning Model with VIIRS RDR. ISPRS International Journal of Geo-Information. 2017; 6(5):130. https://doi.org/10.3390/ijgi6050130
Chicago/Turabian StyleZhang, Dongying, Wen Zhang, Wei Huang, Zhiming Hong, and Lingkui Meng. 2017. "Upscaling of Surface Soil Moisture Using a Deep Learning Model with VIIRS RDR" ISPRS International Journal of Geo-Information 6, no. 5: 130. https://doi.org/10.3390/ijgi6050130
APA StyleZhang, D., Zhang, W., Huang, W., Hong, Z., & Meng, L. (2017). Upscaling of Surface Soil Moisture Using a Deep Learning Model with VIIRS RDR. ISPRS International Journal of Geo-Information, 6(5), 130. https://doi.org/10.3390/ijgi6050130