
The Legibility and Permeability of Cities: Examining the Role of Spatial Data and Metrics



Abstract
:1. Introduction
2. Related Work
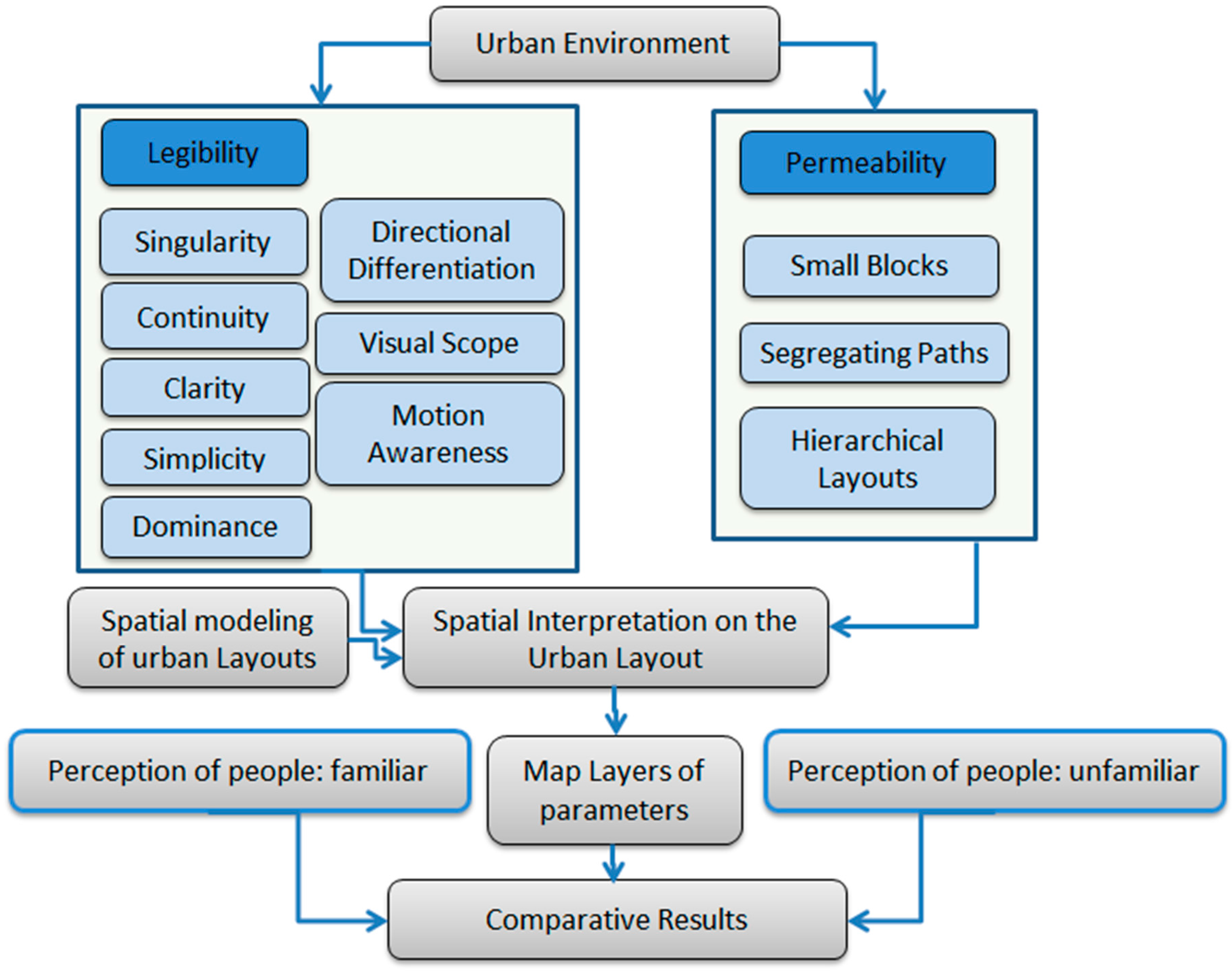
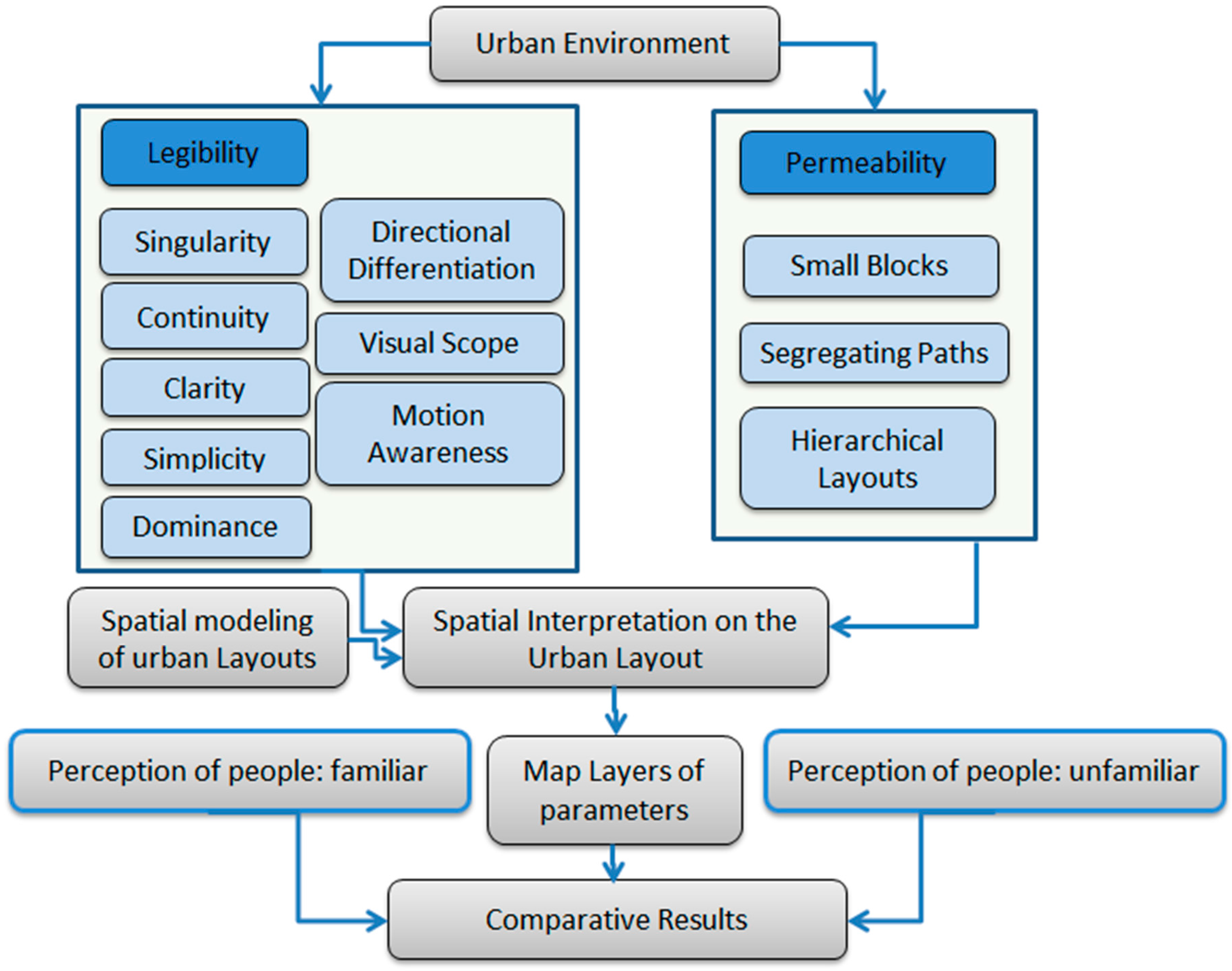
3. Modelling Approach
3.1. Legibility
3.2. Permeability
3.3. Urban Layout
3.4. Evaluating an Urban Layout
3.5. City Legibility Computation and Interpretation
- Singularity: The contrast that appears from parcels’ shapes give a sense of singularity to a given layout. For instance, when the coefficient of variation (CV) derived from parcels’ shape and as given by the measure SHAPE (cf. Table 3) is high enough in a given layout, one might expect to have a few singular parcels in the considered layout. Form Simplicity: The SHAPE parameter denotes the complexity of a shape and can be used to evaluate the simplicity of a set of parcels in a given area.
- Continuity: The continuance CONT parameter (cf. Table 5) gives the degree of continuity of an edge in its urban layout.
- Dominance: The concept of Dominance can be revealed by different spatial measures. First, in an urban layout a low coefficient of variation (CV) derived from parcels’ area (AREA_CV) is likely to exhibit a high degree of similarity and thus a lack of dominant parcels. In contrast, a significant difference between the maximum and minimum of the parcels’ area (AREA_RA) in a given urban layout can rather denote the existence of some conspicuous parcels’ size.
- Clarity of intersection: paths in a layout with low directional discrepancy (cf. angle of intersection in Table 4) are likely to exhibit a low clarity of perception. Instead, and for example, intersections with angles (ANG) between 70 and 110 degrees are likely to reveal a relative clarity of intersection [42].
- Directional differentiation: The Symmetry parameter SYM (cf. Table 5) directly measures this quality.
- Motion Awareness: The bendiness of paths as given by the parameter PB is the parameter that gives a sense of possible motion.
3.6. City Permeability Computation and Interpretation
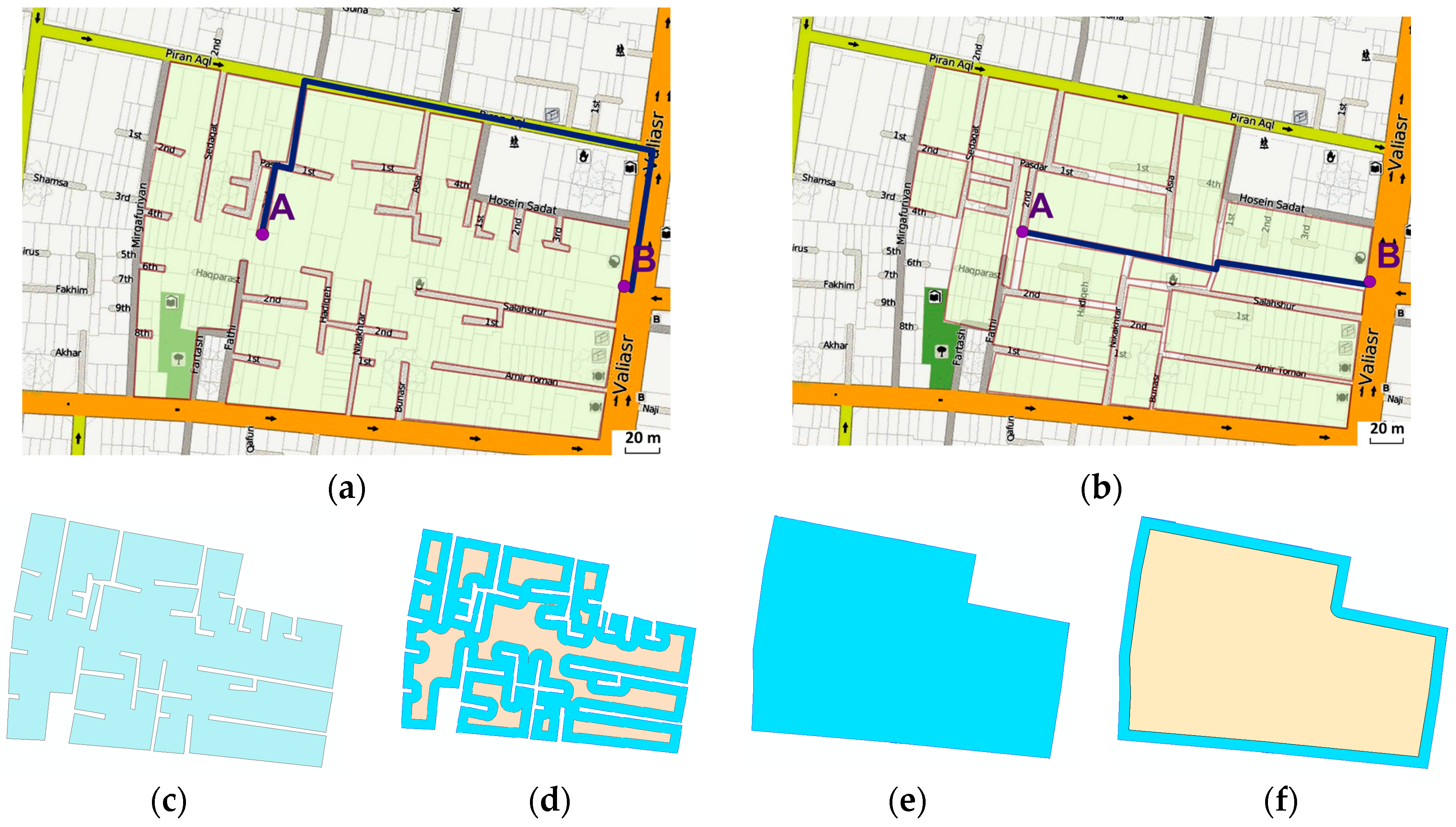
- Small blocks: blocks can be visually perceived and extracted from an urban layout, and by making a difference between connected and isolated parcels. The concept of permeability is also related to the areas of the blocks identified (i.e., the smaller these areas the higher the permeability is likely to be).
- Segregated paths: segregated paths denote to which degree these paths are specific in the road network. However, such trends limit Path width (PW) and then reduce permeability.
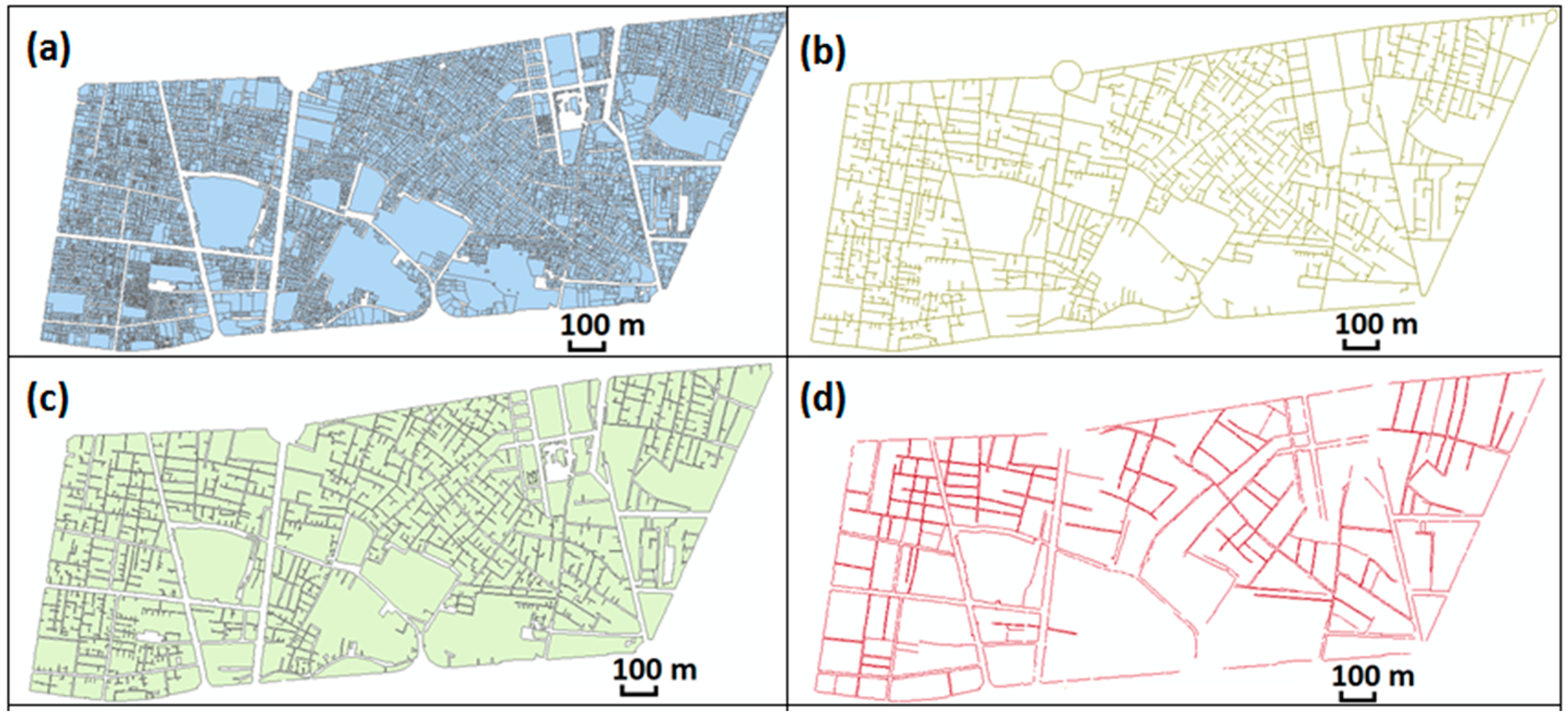
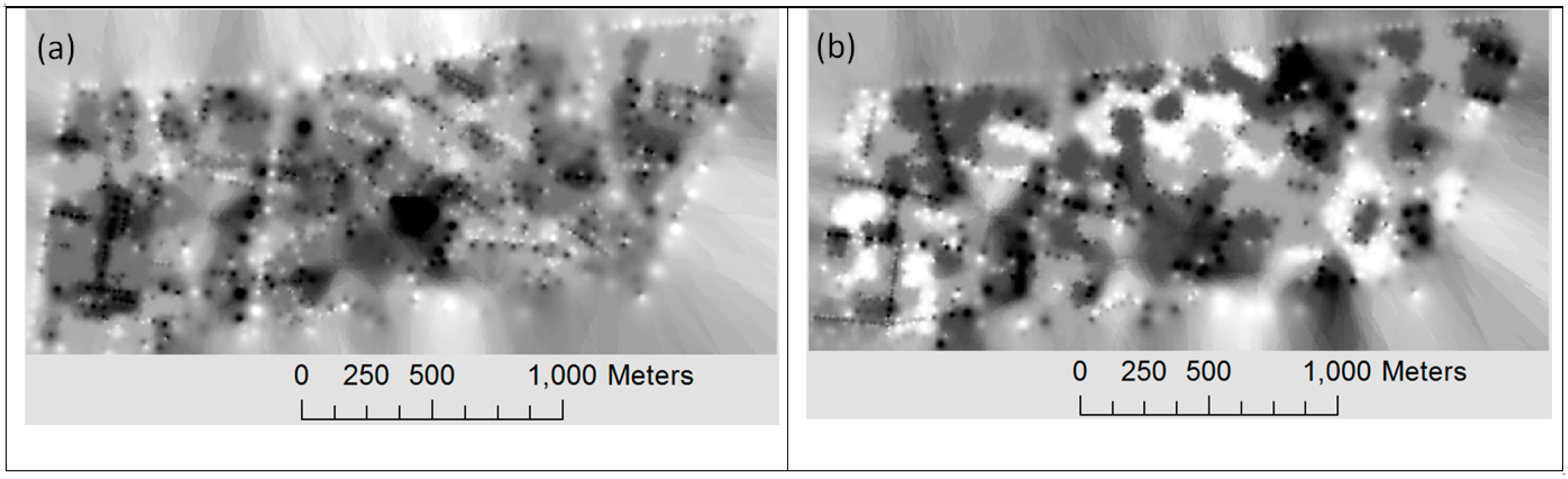
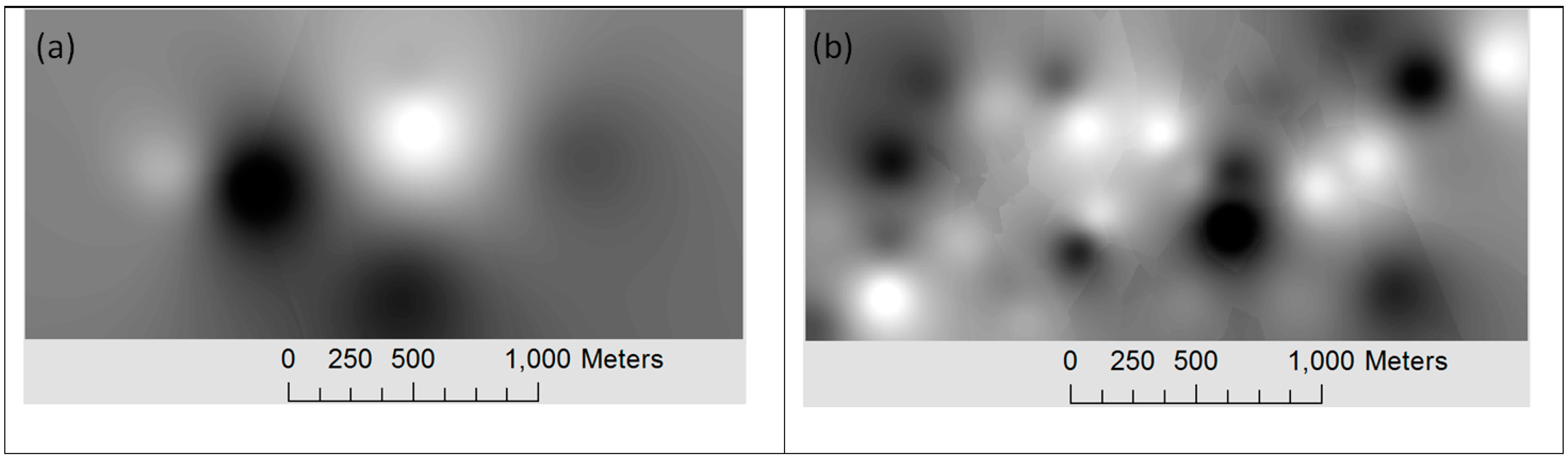
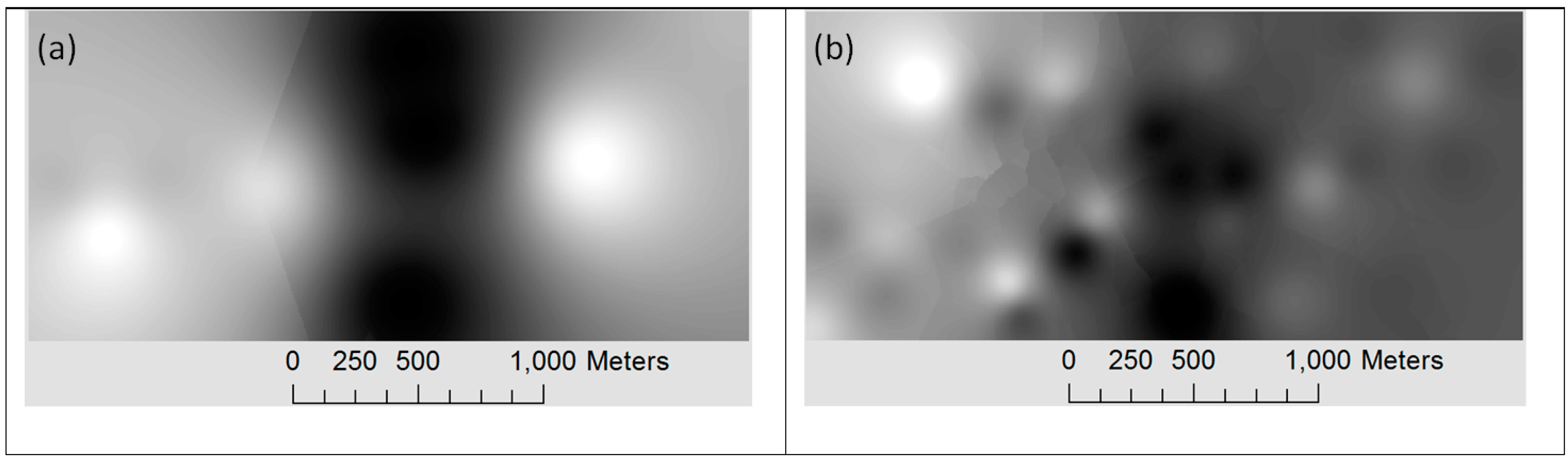
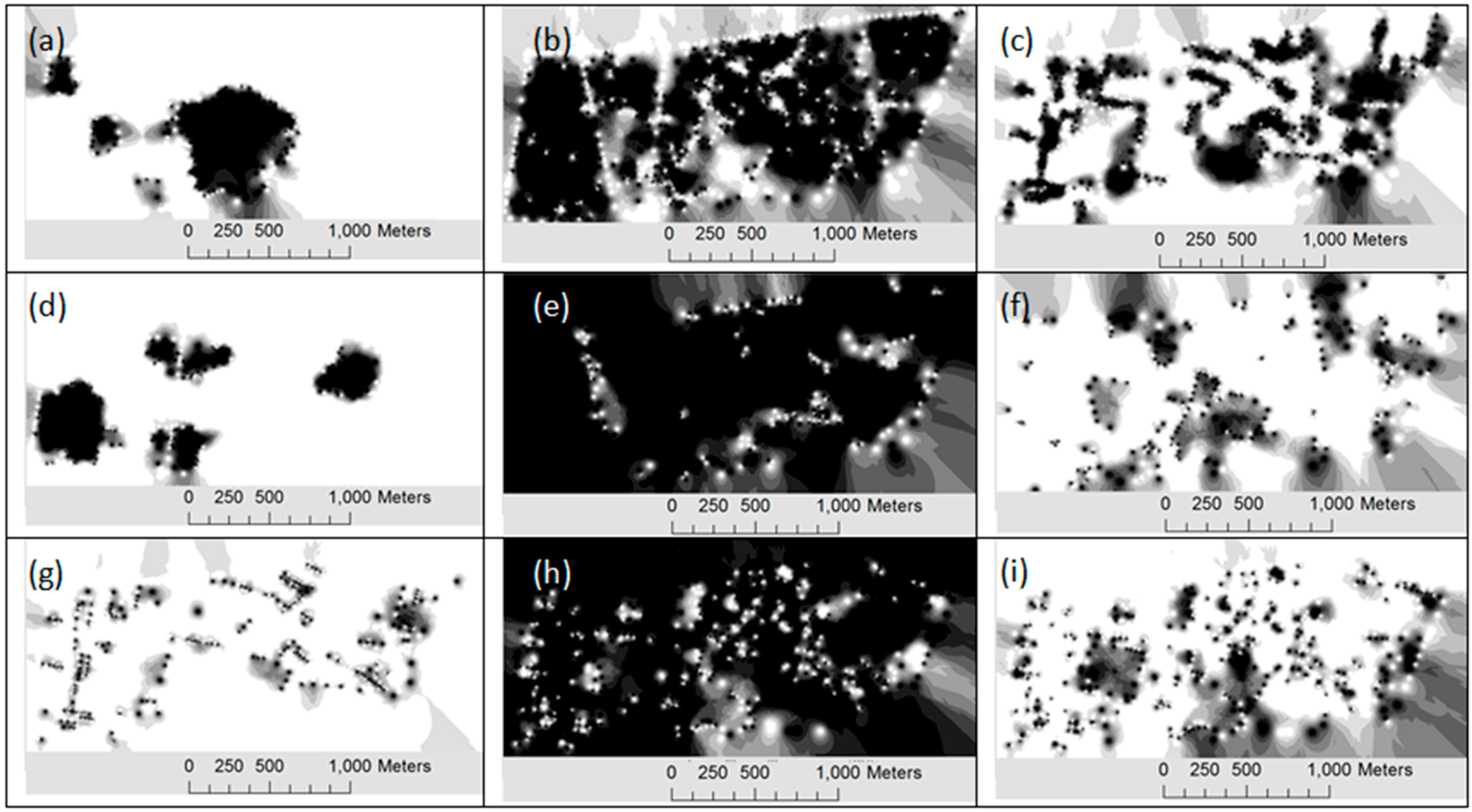
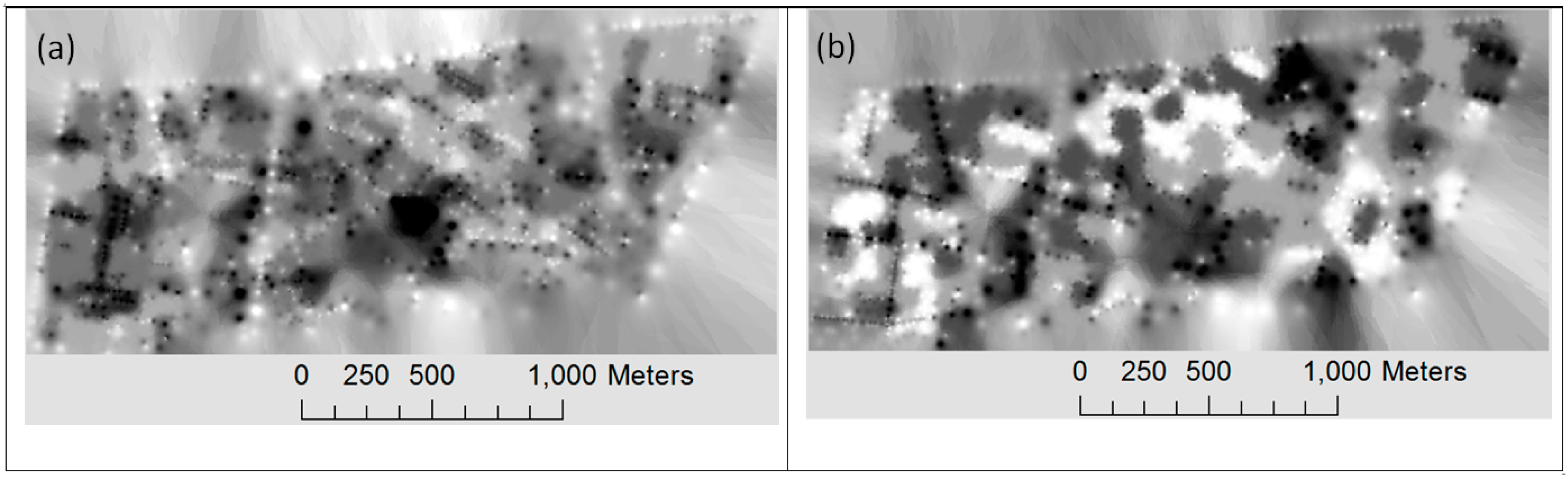
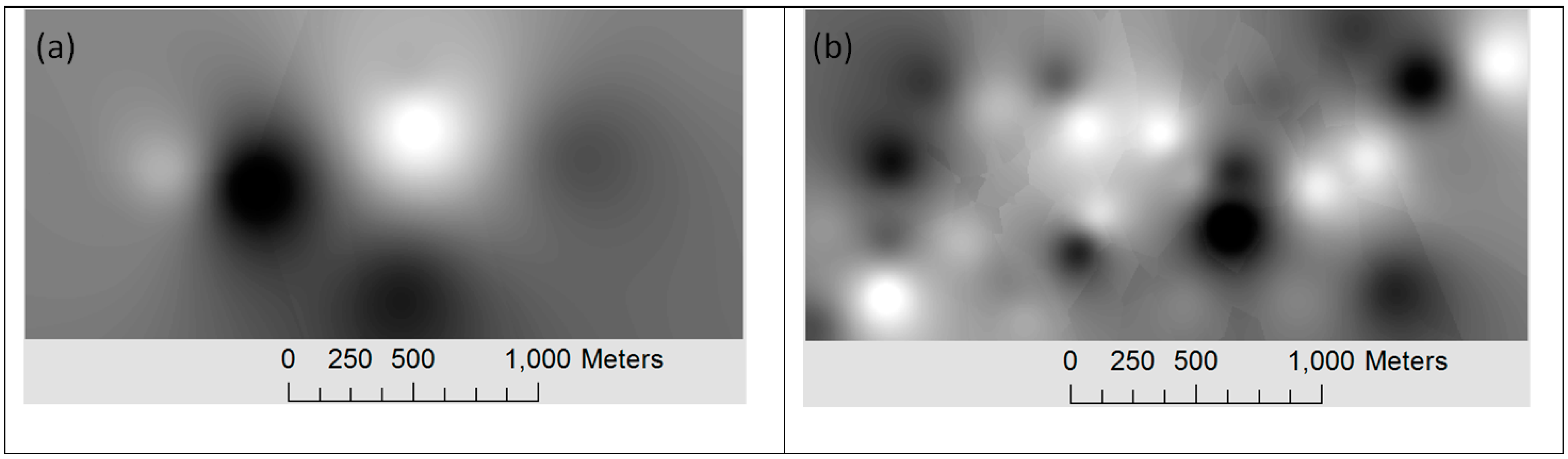
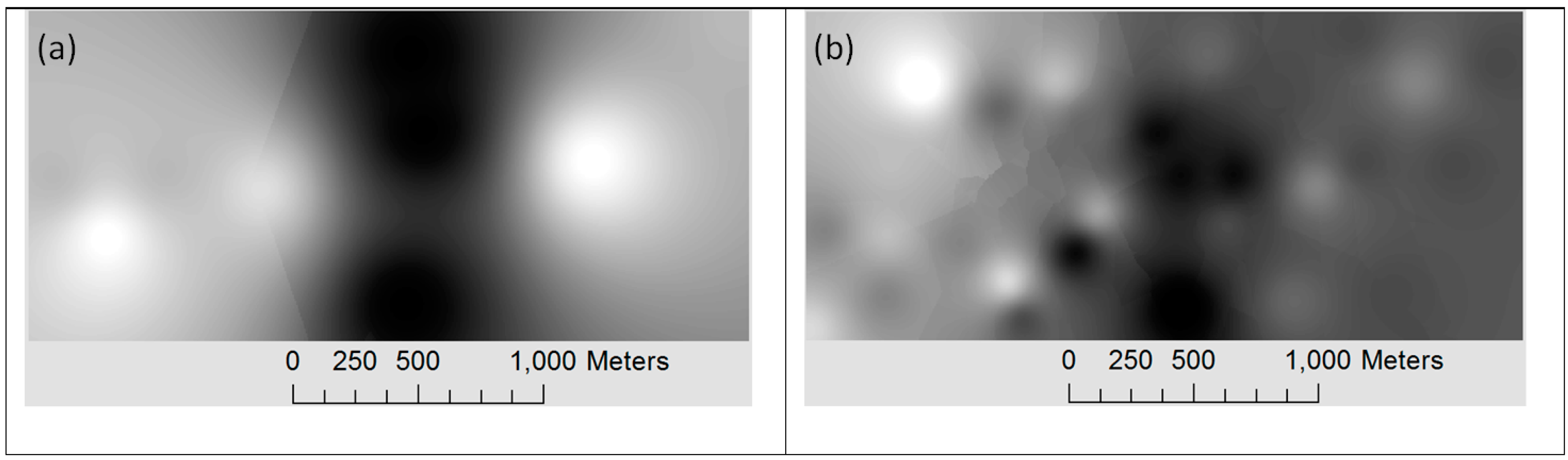
- Hierarchical layouts: as already mentioned, hierarchical layouts are likely to generate cul-de-sacs and little route choices [10]. Indeed, the spatial structure that emerges from a streets layout affects the spatial configuration of blocks. Therefore, the shape of the blocks in a given layout can help to evaluate the local and global properties of an urban hierarchy. Figure 4a presents an urban layout whose network structure reveals a hierarchical pattern. In contrast, Figure 4b denotes a similar extent but the hierarchical pattern does not appear anymore. In fact, the paths that appear in the hierarchical network structure presented in Figure 4a are most often longer as compared to the non-hierarchical one illustrated by Figure 4b. It can be also observed that the hierarchical structure of a given layouts generates bigger blocks with notches in their contours (cf. Figure 4c). Blocks with relative low perimeter to area are likely to decrease this trend. (i.e., revealed by low values of the PARA as mentioned in Table 3). It also appears that for a specified edge depth, the number of resulting cores (NCA) for blocks with many notches is higher than the one of the NCA for a block ones with fewer notches (cf. Figure 4c–f). Indeed the number of cores depends on the edge depth and should be preferably determined according to the mean size of the shapes that emerge from a given layout.
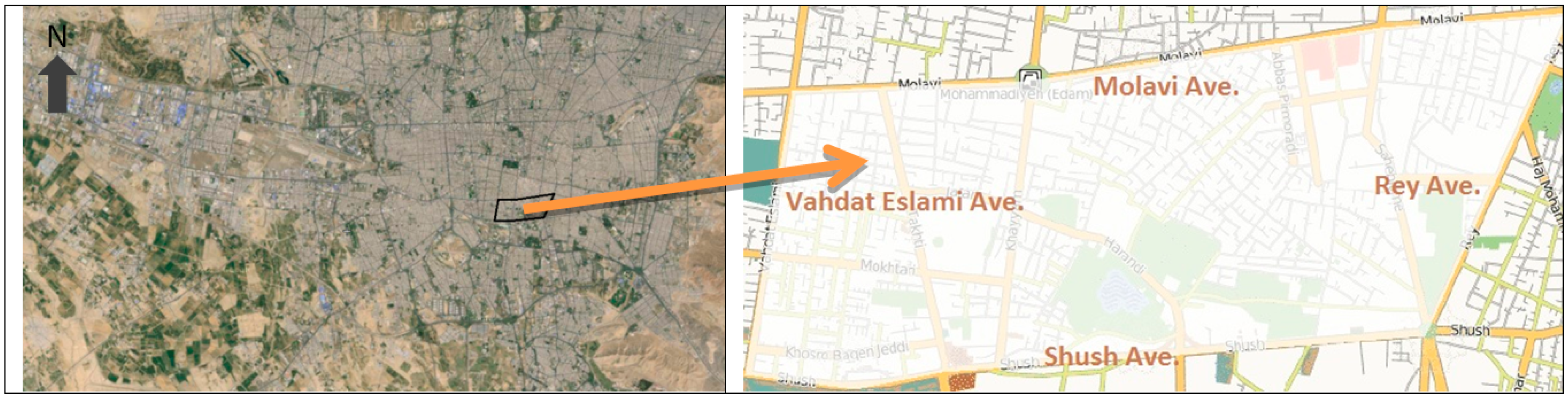
4. Implementation
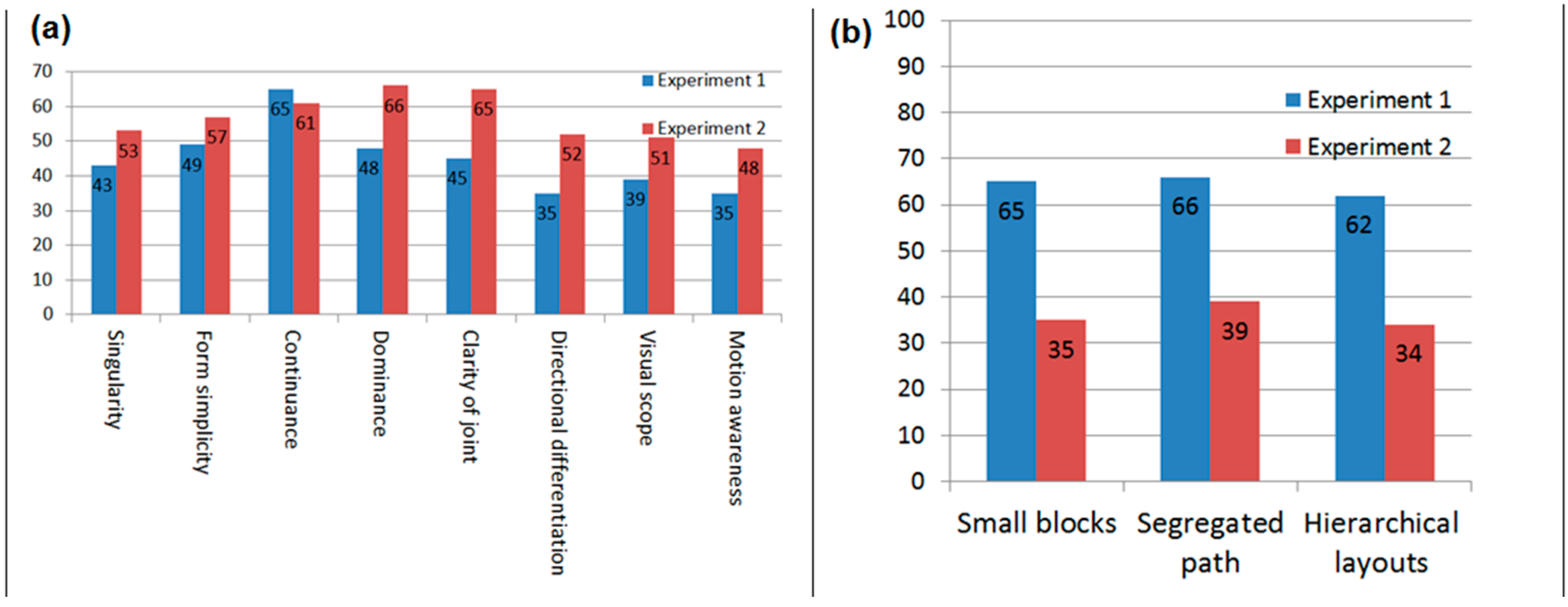
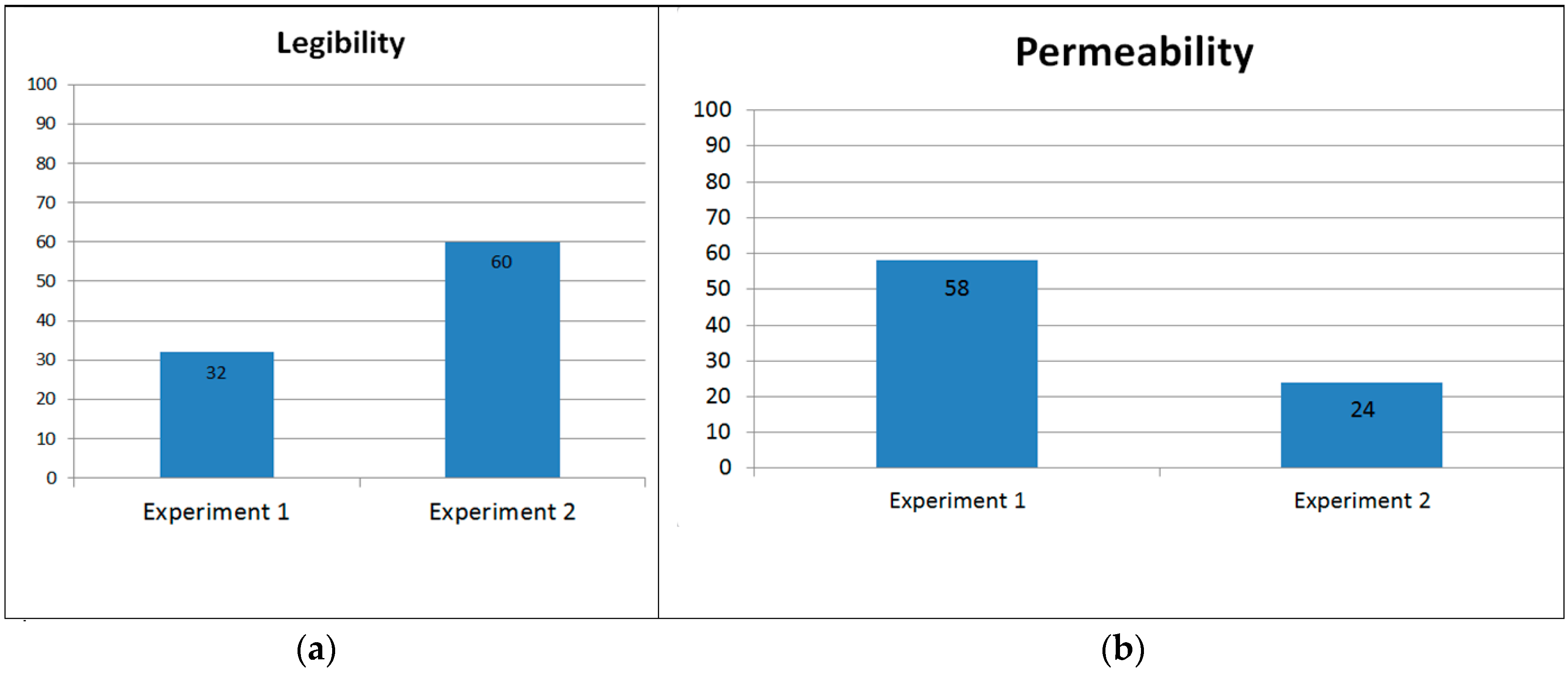
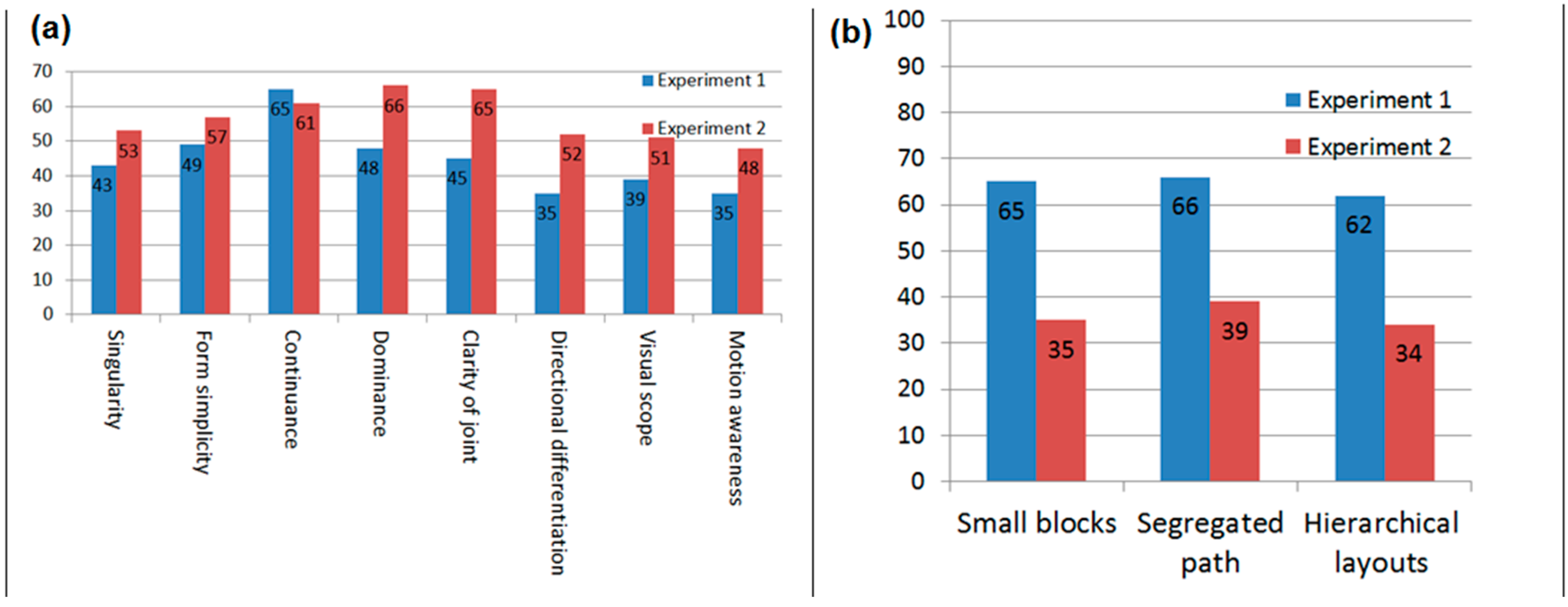
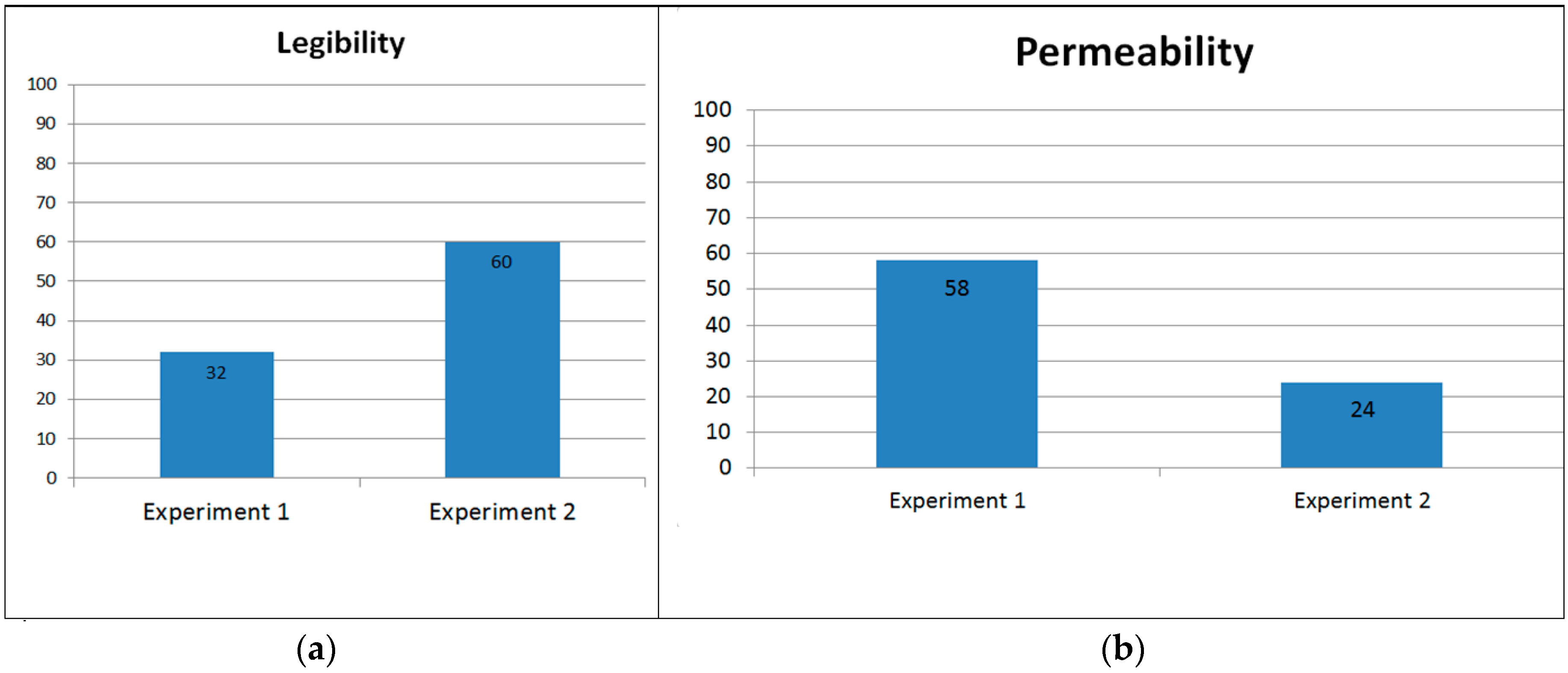
4.1. Experiment 1: Panel of Inhabitants
4.2. Experiment 2: The Panel of Newcomers
5. Evaluation
6. Conclusions
Author Contributions
Conflicts of Interest
Appendix A. Questionnaire Given to the Panellists
Permeability
- The ability to sense or move through a given environment.
- How far and how easily one can sense or move through an environment.
- How the physical properties of environments mitigate either perceptual or locomotive permeability.
| No. | The Title of Point | The Degree of Permeability | ||
| High | Moderate | Low | ||
| 1 | Shush Street-Harandi Square | |||
| 2 | Shush Street-Khayyam Intersection | |||
| 3 | Shush Street-Shahid Borbor Intersection | |||
| 4 | Shush Square | |||
| 5 | Rey Street-Shush Park (Anbar Gandom) | |||
| 6 | Rey Street-Shahid Shams Intersection | |||
| 7 | Molavi Crossroads (Molavi Street-Aminolsoltan Intersection) | |||
| 8 | Molavi Street-Zokaei intersection | |||
| 9 | Molavi Street-Mohammadieh Square | |||
| 10 | Molavi Street-Takhti Square | |||
| 11 | Vahdat Eslami Street-Mokhtari Intersection | |||
| 12 | Vahdat Eslami Street-Shoush Intersection | |||
| 13 | Takhti Street-Mokhtari Intersection | |||
| 14 | Fallah nafari street-Abdolhoseini Intersection | |||
| 15 | Ba Atafe Pour Street (between Vahdat Eslami and Takhti) | |||
| 16 | Mokhtari Street-Yahyavi Intersection | |||
| 17 | Ghaem Street (between Khayam and Takhti) | |||
| 18 | Harandi Street-Zali Ghomi Intersection | |||
| 19 | Maleki Street-Shahid Haqqani Park | |||
| 20 | Almasian Street (Khorsand) | |||
| 21 | Azimi Street-Moghaddasi Intersection (Saboon paz khane) | |||
| 22 | Nasiri Street-Maroofkhani Intersection | |||
| 23 | Borbor Street-Jazmani Intersection | |||
| 24 | Ardestani Street-Pirmoradi Intersection | |||
| 25 | Hatami Brothers Street-Abbas Azadi Intersection | |||
| 26 | Shush Park-Aminolsoltan Street | |||
| 27 | Khayyam Street-Bagh Angoori Intersection | |||
| 28 | Khajooye Kermani Park-Moradi Street | |||
| 29 | Hamdollahi Street-Khosrojerdi Intersection | |||
Legibility
- The ease with which people understand the layout of a place.
- The capacity of a space to give clues to the understanding of the system as a whole.
- The capacity of a space to facilitate one’s orientation in a city.
| No. | The Extent of Neighborhood | The Degree of Legibility | ||
| High | Moderate | Low | ||
| 1 | Vahdat Eslami Street-Below the Molavi Street and above the Shoush Street | |||
| 2 | Takhti Street- Below the Molavi Street and above the Shoush Street | |||
| 3 | Mokhtari Street- Between Takhti and Vahdat Eslami Streets | |||
| 4 | Khayyam Street- Above the Shush Street | |||
| 5 | Molavi Street- Between Saboon Paz Khoone and Haj Gholamali Bazaar | |||
| 6 | Shush Street- Between Shush Square and Khayyam Street | |||
| 7 | Saheb Jame Street- Near Shush Park | |||
| 8 | Rey Street- Around Molavi street | |||
| 9 | Molavi Street- Between Mohammadieh Square and Molavi Crossroads | |||
References
- Kaplan, R.; Kaplan, S. The Experience of Nature: A Psychological Perspective; CUP Archive: Cambridge, UK, 1989. [Google Scholar]
- Meilinger, T.; Knauff, M. Ask for directions or use a map: A field experiment on spatial orientation and wayfinding in an urban environment. J. Spat. Sci. 2008, 53, 13–23. [Google Scholar] [CrossRef]
- Zhao, P. Sustainable urban expansion and transportation in a growing megacity: Consequences of urban sprawl for mobility on the urban fringe of beijing. Habitat Int. 2010, 34, 236–243. [Google Scholar] [CrossRef]
- Baran, P.K.; Smith, W.R.; Moore, R.C.; Floyd, M.F.; Bocarro, J.N.; Cosco, N.G.; Danninger, T.M. Park use among youth and adults examination of individual, social, and urban form factors. Environ. Behav. 2014, 46, 768–800. [Google Scholar]
- Haq, S.; Zimring, C. Just down the road a piece: The development of topological knowledge of building layouts. Environ. Behav. 2003, 35, 132–160. [Google Scholar]
- Penn, A. Space syntax and spatial cognition: Or why the axial line? Environ. Behav. 2003, 35, 30–65. [Google Scholar] [CrossRef]
- Hillier, B.; Hanson, J. The Social Logic of Space; Cambridge University Press: Cambridge, UK, 1984. [Google Scholar]
- Lynch, K. The Image of the City; The MIT Press: Cambridge, MA, USA, 1960. [Google Scholar]
- Cross, L.T. Evaluation of swedish outdoor living environments: Cultural influence on environmental perceptions. J. Archit. Plan. Res. 2007, 23, 338–349. [Google Scholar]
- Bentley, I.; Alcock, A.; Murrain, P.; McGlynn, S.; Smith, G. Responsive Environments: A Manual for Designers; The Architectural Press: London, UK, 1985. [Google Scholar]
- Stamps, A.E. Effects of multiple boundaries on perceived spaciousness and enclosure. Environ. Behav. 2012, 45, 851–875. [Google Scholar] [CrossRef]
- McCall, R.; O’Neill, S.; Carroll, F.; Benyon, D.; Smyth, M. Responsive environments, place and presence. PsychNol. J. 2005, 3, 35–73. [Google Scholar]
- Carmona, M.; Heath, T.; Oc, T.; Tiesdell, S. Public Places, Urban Spaces; Architectural Press: Oxford, UK, 2003. [Google Scholar]
- Herzog, T.R.; Leverich, O.L. Searching for legibility. Environ. Behav. 2003, 35, 459–477. [Google Scholar] [CrossRef]
- Stamps, A.E. Isovists, enclosure, and permeability theory. Environ. Plan. B Plan. Des. 2005, 32, 735–762. [Google Scholar] [CrossRef]
- Lopes, A.S.; Cavalcante, A.P.d.H. Wayfinding measurement through path choice opportunity. In Eighth International Space Syntax Symposium; Greene, M., Reyes, J., Castro, A., Eds.; Pontifical Catholic University of Chile (PUC): Santiago, Chile, 2012. [Google Scholar]
- Mohamed, A.A. Evaluating way-finding ability within urban environment. In Eighth International Space Syntax Symposium; Greene, M., Reyes, J., Castro, A., Eds.; Pontifical Catholic University of Chile (PUC): Santiago, Chile, 2012. [Google Scholar]
- Hillier, B. Studying cities to learn about minds: Some possible implications of space syntax for spatial cognition. Environ. Plan. B Plan. Des. 2012, 39, 12–32. [Google Scholar] [CrossRef]
- Gustafson, E.J. Quantifying landscape spatial pattern: What is the state of the art. Ecosystems 1998, 1, 143–156. [Google Scholar] [CrossRef]
- Aguilera, F.; Valenzuelaa, L.M.; Botequilha-Leitãob, A. Landscape metrics in the analysis of urban land use patterns: A case study in a spanish metropolitan area. Landsc. Urban Plan. 2011, 99, 226–238. [Google Scholar] [CrossRef]
- Voordea, T.V.D.; Jacquet, W.; Cantersa, F. Mapping form and function in urban areas: An approach based on urban metrics and continuous impervious surface data. Landsc. Urban Plan. 2011, 102, 143–155. [Google Scholar]
- Fan, C.; Myint, S. A comparison of spatial autocorrelation indices and landscape metrics in measuring urban landscape fragmentation. Landsc. Urban Plan. 2014, 121, 117–128. [Google Scholar] [CrossRef]
- Kowe, P.; Pedzisai, E.; Gumindoga, W.; Rwasoka, D.T. An analysis of changes in the urban landscape composition and configuration in the sancaktepe district of istanbul metropolitan city, turkey. Geocarto Int. 2015, 30, 506–519. [Google Scholar] [CrossRef]
- Triantakonstantis, D.; Stathakis, D. Examining urban sprawl in europe using spatial metrics. Geocarto Int. 2015, 30, 1092–1112. [Google Scholar] [CrossRef]
- Bahrainy, H.; Khosravi, H. The impact of urban design features and qualities on walkability and health in under-construction environments: The case of hashtgerd new town in iran. Cities 2013, 31, 17–28. [Google Scholar] [CrossRef]
- Steiniger, S.; Lange, T.; Burghardt, D.; Weibel, R. An approach for the classification of urban building structures based on discriminant analysis techniques. Trans. GIS 2008, 12, 31–59. [Google Scholar]
- Schroder, C.J.; Mackaness, W.A.; Gittings, B.M. Giving the ‘right’ route directions: The requirements for pedestrian navigation systems. Trans. GIS 2011, 15, 419–438. [Google Scholar] [CrossRef]
- Freundschuh, S.M.; Egenhofer, M.J. Human conceptions of spaces: Implications for GIS. Trans. GIS 1997, 2, 361–375. [Google Scholar] [CrossRef]
- Crooks, A.; Croitoru, A.; Lu, X.; Wise, S.; Irvine, J.M.; Stefanidis, A. Walk this way: Improving pedestrian agent-based models through scene activity analysis. ISPRS Int. J. Geo-Inf. 2015, 4, 1627–1656. [Google Scholar] [CrossRef]
- Li, X.; Hijazi, I.; Koenig, R.; Lv, Z.; Zhong, C.; Schmitt, G. Assessing essential qualities of urban space with emotional and visual data based on gis technique. ISPRS Int. J. Geo-Inf. 2016, 5, 218. [Google Scholar]
- Gjerde, M. Visual evaluation of urban streetscapes: How do public preferences reconcile with those held by experts? Urban Des. Int. 2011, 16, 153–161. [Google Scholar] [CrossRef]
- Long, Y.; Baran, P.K. Does intelligibility affect place legibility? Understanding the relationship between objective and subjective evaluations of the urban environment. Environ. Behav. 2012, 44, 616–640. [Google Scholar] [CrossRef]
- Zmudzinska-Nowak, M. Searching for legible city form: Kevin lynch’s theory in contemporary perspective. J. Urban Technol. 2003, 10, 19–39. [Google Scholar] [CrossRef]
- Stamps, A.E. Effects of permeability on perceived enclosure and spaciousness. Environ. Behav. 2010, 42, 864–886. [Google Scholar]
- Tralhao, L.; Sousa, N.; Ribeiro, N.; Coutinho-Rodrigues, J. Design of bicycling suitability maps for hilly cities. Munic. Eng. 2015, 168, 96–105. [Google Scholar]
- Silavi, T.; Hakimpour, F.; Claramunt, C.; Nourian, F. Design of a spatial database to analyze the forms and responsiveness of an urban environment using an ontological approach. Cities 2016, 52, 8–19. [Google Scholar] [CrossRef]
- Herold, M.; Couclelis, H.; Clarke, K.C. The role of spatial metrics in the analysis and modeling of urban land use change. Comput. Environ. Urban Syst. 2005, 29, 369–399. [Google Scholar] [CrossRef]
- Wang, F.; Marceau, D.J. A patch-based cellular automaton for simulating land-use changes at fine spatial resolution. Trans. GIS 2013, 17, 828–846. [Google Scholar] [CrossRef]
- McGarigal, K.; Marks, B.J. Fragstats: Spatial Pattern Analysis Program for Quantifying Landscape Structure; General Technical Report, PNW-GTR-351; U.S. Department of Agriculture, Forest Service, Pacific Northwest Research Station: Portland, OR, USA, 1995.
- McGarigal, K.; Cushman, S.A.; Neel, M.C.; Ene, E. Fragstats: Spatial Pattern Analysis Program for Categorical Maps. Available online: http://www.umass.edu/landeco/research/fragstats/fragstats.html (acessed on 25 February 2016).
- Jiang, B.; Claramunt, C.; Klarqvist, B. Integration of space syntax into gis for modelling urban spaces. Int. J. Appl. Earth Obs. Geoinform. 2000, 2, 161–171. [Google Scholar]
- TAC. Geometric Design Guide for Canadian Roads Canada; Transportation Association of Canada: Ottawa, ON, Canada, 1999. [Google Scholar]
- Silva, K.D. Mapping meaning in the city image: A case study of kandy, sri lanka. J. Archit. Plan. Res. 2011, 28, 229–251. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Qualities | Examples |
|---|---|
| Singularity: Singularity denotes the contrast and distinguishability of urban objects in a given scene [8]. This is illustrated by the relative high singularity of the parcels that appear in the Khayyam neighbourhood in Tehran. | 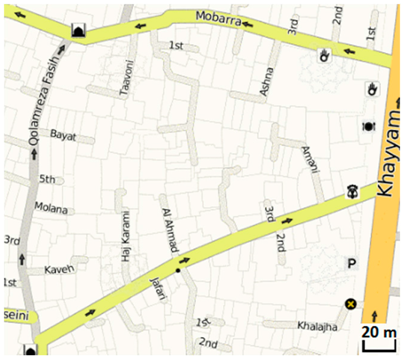 |
| Simplicity: Simplicity characterises the geometrical forms of an urban layout. Simple forms in an urban layout are likely to favour a better perception and understanding of the environment [8]. The figure to the right presents an area that exhibits regular and simple forms of the parcels (Kashanak neighbourhood). | 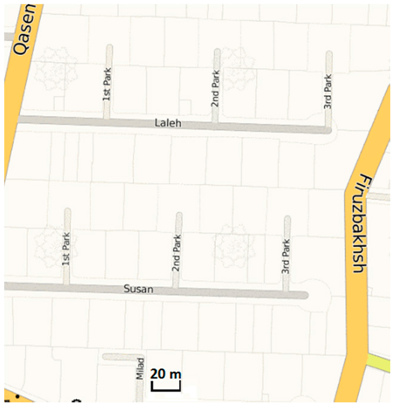 |
| Continuity: Continuance characterises the edges of an urban layout. A continuous edge should visually extent the potential perception of an urban space [8]. The figure to the right presents an example of continuity edge to the North, while there is a breakdown of continuity close to a street intersection to the South. | 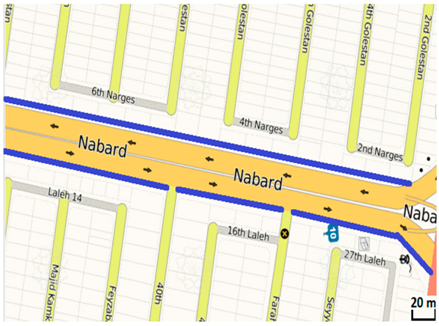 |
| Dominance: Dominance denotes the property of a given urban feature with respect to the others in its neighbourhood [8]. The figure to the right shows a parcel very much different from the others in the neighbourhood. | 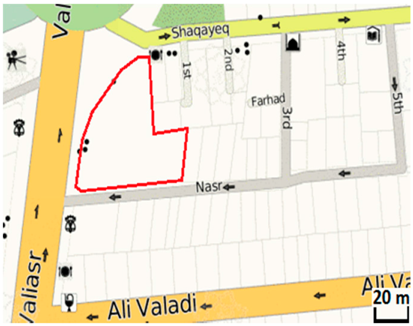 |
| Clarity of intersections: Street intersections are strategic places of an urban layout and should be highly perceptible [8]. Paths in a layout with low directional discrepancy are likely to exhibit a low clarity of perception. The figure to the right exhibits an example of such low clarity. |  |
| Directional differentiation: Directional differentiation denotes asymmetries of urban streets. For instance, asymmetries revealed by radial differences of urban streets can obscure the sense of direction [8]. The example shown in the figure to the right by the Navvab highway exhibits a case whose symmetric sides obscure the sense of direction. | 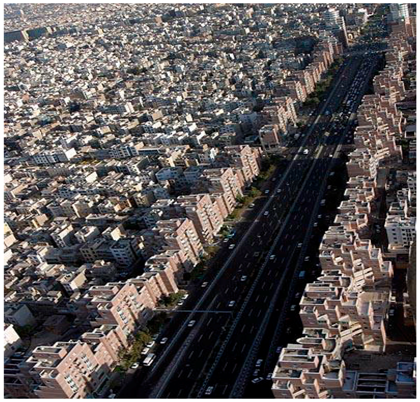 |
| Visual scope: The visual scope reflects the range and penetration of the vision in a given street [8]. The example illustrated by the figure to the right shows the Sattarkhan and Takestan Streets in Tehran whose bends limit the perspective offered. |  |
| Motion awareness: Motion awareness denotes the qualities sensible to the observer, through visual and the kinaesthetic senses, and that constrains motion. Motion awareness is for instance impacted by curves and direction changes that constrain the visual scope [8]. The example to the right presents the bendiness of Allameh Jafari street in the Tehran that constrains motion. | 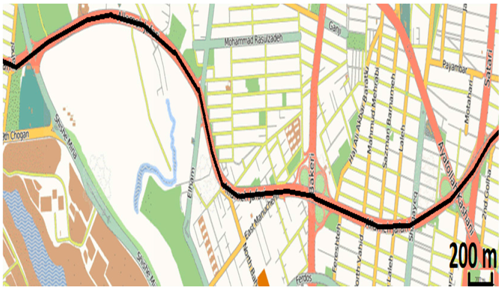 |
| Design Trends | Examples |
|---|---|
| Small blocks: Small blocks offer a higher sense of permeability by offering additional and generally short route alternatives to choose from as. As it can be seen in the example to the right, the Euclidean distance between locations A and B are equal to the distance between points B and C. However, the path between A and B is shorter than the path between B and C. This is due to an important difference in the size of the blocks that are situated between these pairs of locations. | 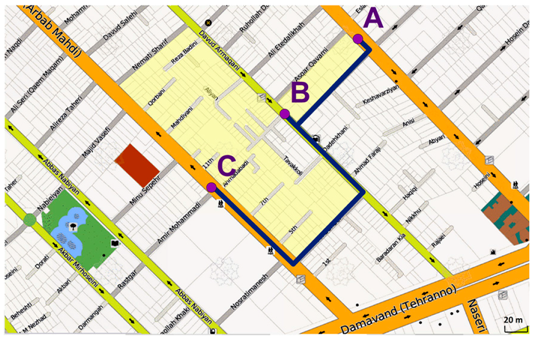 |
| Segregating paths: Segregating paths can be achieved by segregating transportation opportunities in the urban network, for example by specialising different network categories such as private vehicle, public transportation and motorcycle users [10]. Segregated paths have limited potential in passing through and consequently have less permeability. The figure shows the Vali-e-Asr Street in the Tehran that is segregated to a path for buses and a one way path for vehicles. This leads to heavy traffic in the middle of Tehran as shown in the picture but better traffic performance for public transportation. |  |
| Hierarchical layouts: A hierarchy layout denotes an urban network designed at different levels of granularity. As illustrated in the figure to the right, hierarchical layouts generate cul-de-sacs and less route opportunities and then less permeability [10], but a probable sense of security to the inhabitants. |  |
| Landscape Metric | Definition | Illustration |
|---|---|---|
| Parcel Area: AREA | AREA(p) denotes the area of a parcel p. |  |
| Parcel Perimeter: PERIM | PERIM(p) denotes the perimeter of a parcel p. |  |
| Perimeter/Area: PARA | PARA(p) denotes the Perimeter-Area ratio, it is given as follows: PARA(p) = PERIM(p)/AREA(p) | |
| Shape Index: SHAPE | SHAPE(p) denotes the complexity of the shape of a parcel p. Shape complexity characterises the geometry of a given parcel, whether a parcel tends to be simple and compact, or irregular and convoluted. SHAPE(p) = 0.25PERIM(p)/√AREA(p) | |
| Number of Core Areas: NCA | NCA(p) denotes the number of disjoint core areas of a parcel p based on specified edge depths. It is given by the number of internal zones generated by the application of a buffer function with a negative depth. |  |
| Geometric Measures | Definition | Illustration |
|---|---|---|
| Path-Length: PL | PL(pa) denotes the length of a path pa. |  |
| Path-Width: PW | PW(pa) denotes the width of a path pa. | |
| Path-Bendiness: PB | PB(pa) denotes the bendiness of a path pa. It is derived by the difference between the length of a path (i.e., black line) and the Euclidean distance between the first and end points of the path (i.e., red line) as illustrated by the Figure to the right. | |
| Angle of the intersection of two paths pa1 and pa2: ANG | ANG(pa1, pa2) denotes the angle in the intersection between two given paths pa1 and pa2. |
| Topologic Measure | Description | Illustration |
|---|---|---|
| Alignment: ALT | ALT(edg, p1, p2,…, pn) denotes the alignment of a set of parcels (p1, p2,…, pn) along an edge edg. It is given by the ratio of the length of that edge (e.g., the red polyline) to the distance between the endpoints of the edge (e.g., the blue line). | 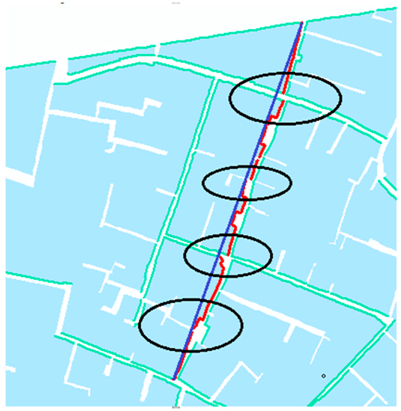 |
| Continuance: CONT | CONT(edg, pa1, pa2,…, pan) denotes the relative continuity of the blocks along an edge edg (an outer boundary of the aligned blocks). It is given by the inverse of the number of intersecting paths pa1 to pan (e.g., the ellipses in the figure to the right) along that edge. | |
| Symmetry: SYM | SYM(pa) denotes the symmetry given by analysing the parcel boundaries along each side of a given path pa. This measure of symmetry is given by the ratio of the difference between the highest to the lowest (range) and mean of parcels boundaries (e.g., black and gray lines on each side of the path), to the right by the similar value to the ones to the left of a path pa. In the example given to the right, the number of parcels to the right is equal to the number of parcels to the left, but different parcel boundary ranges and means slightly alter the sense of symmetry of that path. | 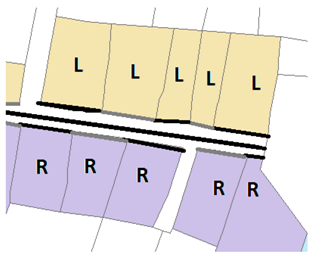 |
| Form Qualities | Computation Rules |
|---|---|
| Singularity | An urban layout, is considered to be a singular one if ∀ District d ∈ Environment ⟹ SHAPE_CV(d) gives a relative high value |
| Form Simplicity | An urban layout, is considered has reflecting Simplicity if ∀ Parcel p ∈ Environment ⟹ SHAPE(p) gives a relative low value |
| Continuity | An urban layout, is considered has reflecting a high degree of Continuance if ∀ Edge edg ∈ Environment ⟹ CONT(edg) gives a relative high value |
| Dominance | An urban layout, reflects some Dominance trends if ∀ District d ∈ Environment ⟹ AREA_CV(d) ∈ gives relatively a low value ⋀ AREA_RA(d) gives a relative high value |
| Clarity | An urban layout, is considered has reflecting clear intersections if ∀ path pa1, path pa2 ∈ Environment⟹ [~Intersection(pa1,pa2)] ⋁[70° < ANG(path1, path2) <110°] |
| Directional Differentiation | An urban layout, has clear Directional Differentiation if ∀ path pa ∈ Environment ⟹ SYM(pa) gives a relative low value |
| Visual Scope | An urban layout, has a clear Visual Scope if ∀ edge edg and parcels p1 p2, …, pn ∈ Environment ⟹ ALT(edg, p1, p2, …, pn) gives a relative high value |
| An urban layout, has a clear Visual Scope if ∀ path pa ∈ Environment ⟹ PB(pa) gives a relative low value | |
| Motion Awareness | An urban layout has a high value of Motion Awareness if ∀ path pa ∈ Environment ⟹ PB(pa) gives a relative high value |
| Parameters | Computational Rules |
|---|---|
| Small Blocks | An urban layout, has Small Blocks if ∀ block b ∈ Environment ⟹ AREA(b) gives most often a relative lower value |
| Segregated Paths | An urban layout, is less affected by Segregation if ∀ path Pa ∈ Environment ⟹ WIDTH(Pa) gives a relative high value |
| Hierarchical layouts | An urban layout is not Hierarchical if ∀ block b ∈ Environment ⟹ PARA(b) gives a relative low value ⋀ NCA(b) gives a relative low value |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silavi, T.; Hakimpour, F.; Claramunt, C.; Nourian, F. The Legibility and Permeability of Cities: Examining the Role of Spatial Data and Metrics. ISPRS Int. J. Geo-Inf. 2017, 6, 101. https://doi.org/10.3390/ijgi6040101
Silavi T, Hakimpour F, Claramunt C, Nourian F. The Legibility and Permeability of Cities: Examining the Role of Spatial Data and Metrics. ISPRS International Journal of Geo-Information. 2017; 6(4):101. https://doi.org/10.3390/ijgi6040101
Chicago/Turabian StyleSilavi, Tolue, Farshad Hakimpour, Christophe Claramunt, and Farshad Nourian. 2017. "The Legibility and Permeability of Cities: Examining the Role of Spatial Data and Metrics" ISPRS International Journal of Geo-Information 6, no. 4: 101. https://doi.org/10.3390/ijgi6040101
APA StyleSilavi, T., Hakimpour, F., Claramunt, C., & Nourian, F. (2017). The Legibility and Permeability of Cities: Examining the Role of Spatial Data and Metrics. ISPRS International Journal of Geo-Information, 6(4), 101. https://doi.org/10.3390/ijgi6040101