Deriving Ephemeral Gullies from VHR Image in Loess Hilly Areas through Directional Edge Detection


Abstract
1. Introduction
2. Area and Data
2.1. Areas
2.2. Data
3. Method
3.1. Basic Idea
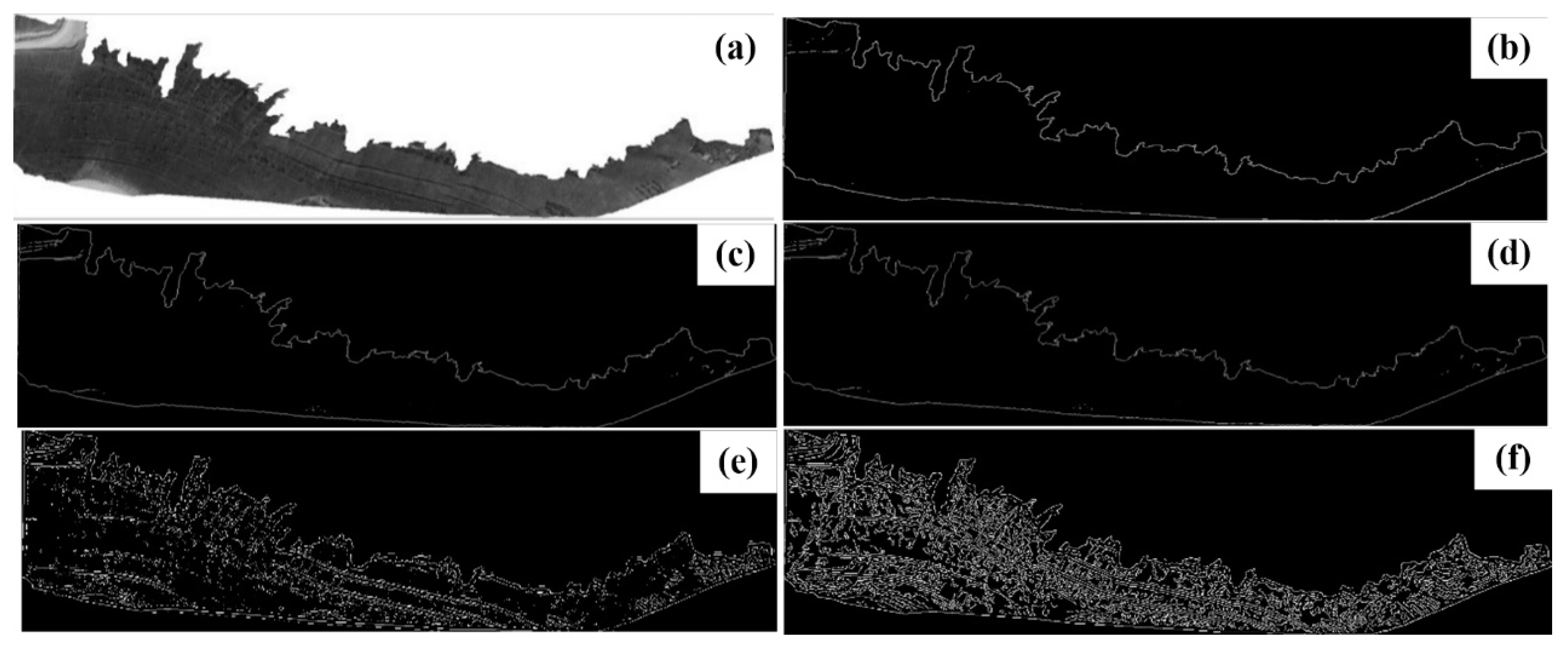
3.2. Edge Detection
3.3. Directional Detection
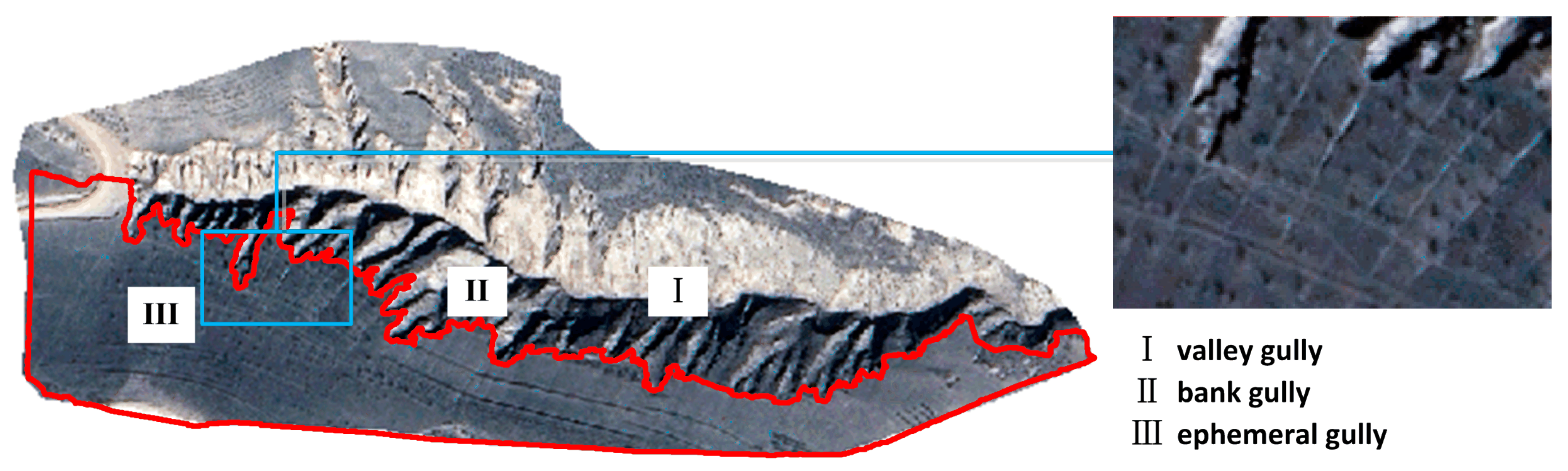
3.3.1. Ephemeral Gully Direction
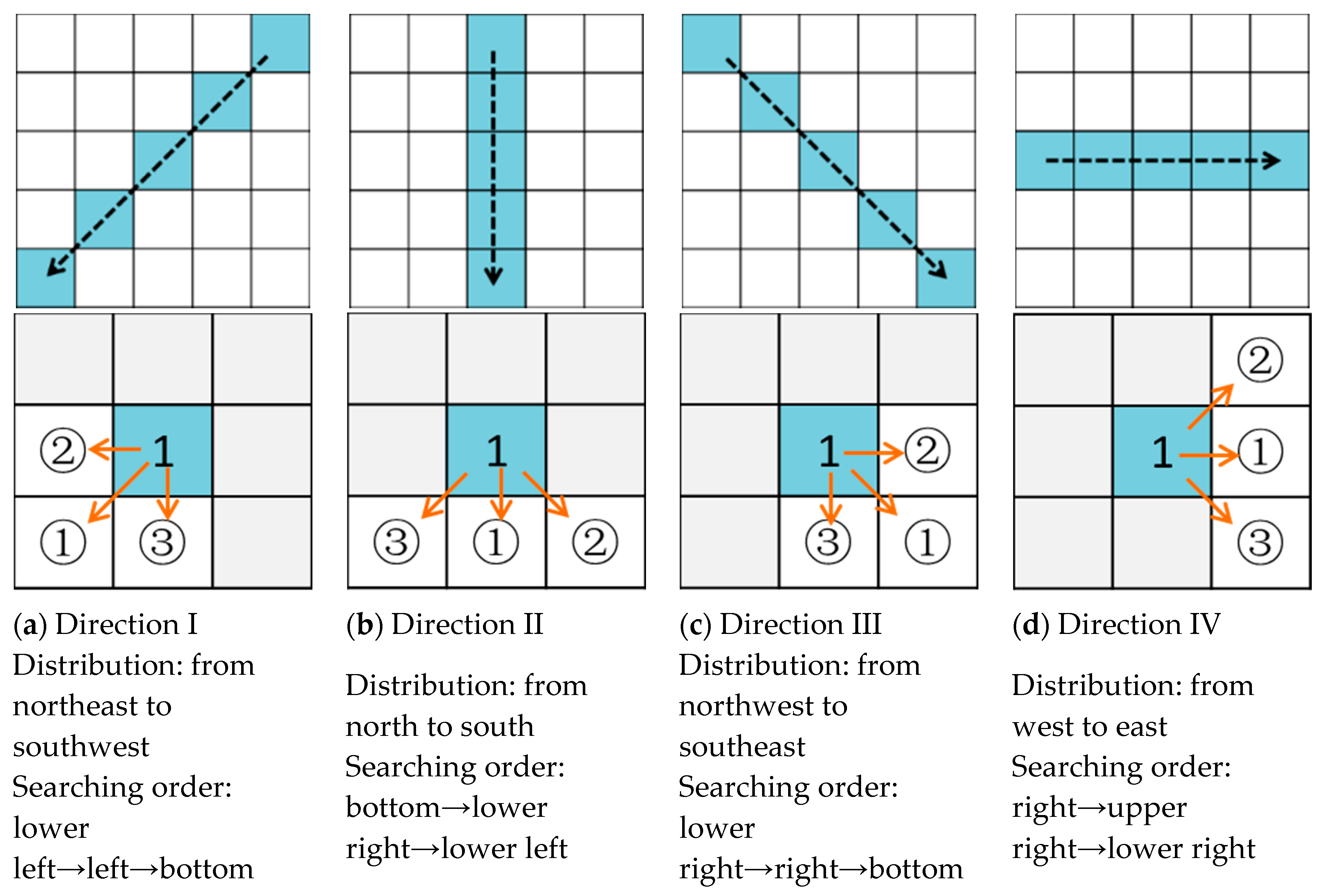
3.3.2. Directional Searching Rules
3.3.3. Identifying Ephemeral Gullies
3.4. Reference Data and Accuracy Assessment
3.4.1. Reference Data
3.4.2. Accuracy Assessment
4. Results and Discussion
4.1. Parameter Comparison
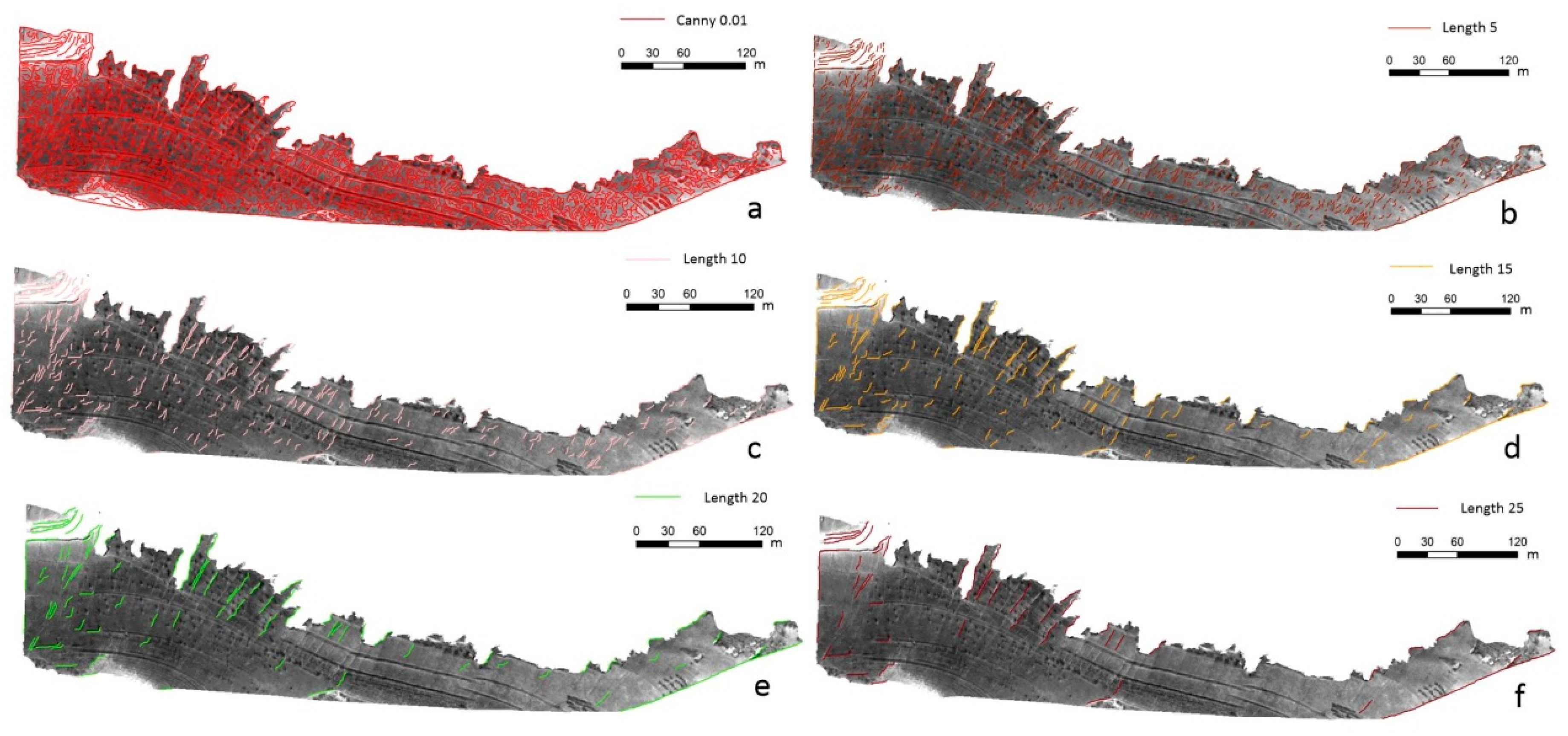
4.1.1. Threshold of the Canny Parameter
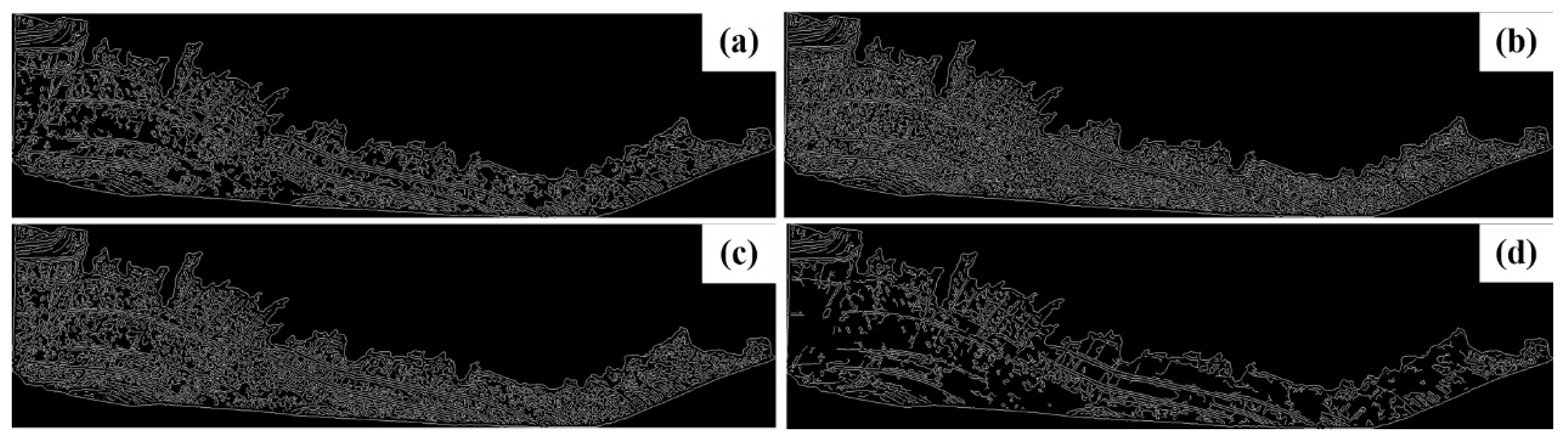
4.1.2. Length Threshold
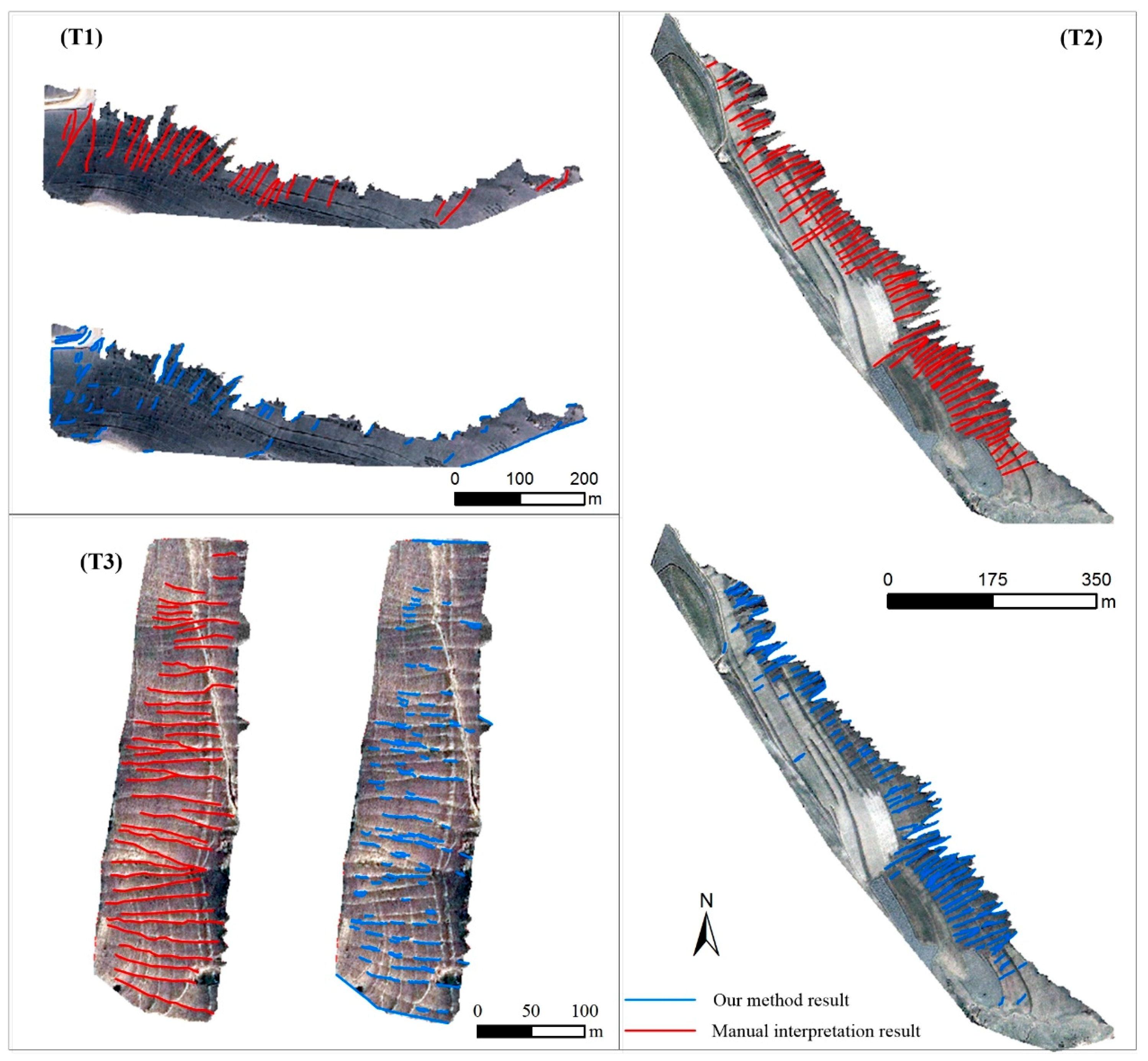
4.2. Result
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Poesen, J.; Govers, G.; Boardman, J.; Foster, I.D.L.; Dearing, J.A. Gully erosion in the loam belt of belgium: Typology and control measures. In Soil Erosion on Agricultural Land, Proceedings of a Workshop Sponsored by the British Geomorphological Research Group, Coventry, UK, January 1989; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 1990; pp. 513–530. [Google Scholar]
- Jwa, P. Conditions for gully formation in the belgian loam belt and some ways to control them. Soil Technol. 1989, 2, 78–81. [Google Scholar]
- Zhu, X. Classification on the soil erosion in the loess region. Acta Pedol. Sin. 1956, 4, 99–115. (In Chinese) [Google Scholar]
- Laixing, L. A tentative classification of landforms in the loess plateau. Acta Geogr. Sin. 1956, 23, 201–222. (In Chinese) [Google Scholar]
- Foster, G.R. Understanding ephemeral gully erosion. Soil Conserv. 1986, 2, 90–125. [Google Scholar]
- Liu, Y.B.; Zhu, X.M.; Zhou, P.H.; Tang, K.L. The laws of hillslope channel erosion occurrence and development on loess plateau. Mem. Northwest. Inst. Soil Water Conserv. Acad. Sin. 1988, 1, 9–18. (In Chinese) [Google Scholar]
- Poesen, J.W.A.; Torri, D.B.; Vanwalleghem, T. Gully erosion: Procedures to adopt when modelling soil erosion in landscapes affected by gullying. In Handbook of Erosion Modelling; John Wiley & Sons: Chichester, UK, 2010; pp. 360–386. [Google Scholar]
- Zheng, F.; Xu, X.; Qin, C. A review of gully erosion process research. Trans. Chin. Soc. Agric. Mach. 2016, 47, 48–59. (In Chinese) [Google Scholar]
- Tang, K.; Zheng, S.; Xi, D.; Sun, B. Soil erosion and its prevention and control of sloping farmland in the xingzi watershed of loess plateau of China. J. Soil Water Conserv. 1983, 43–48. (In Chinese) [Google Scholar]
- Vandaele, K.; Poesen, J.; Govers, G.; Wesemael, B.V. Geomorphic threshold conditions for ephemeral gully incision. Geomorphology 1996, 16, 161–173. [Google Scholar] [CrossRef]
- Desmet, P.J.J.; Poesen, J.; Govers, G.; Vandaele, K. Importance of slope gradient and contributing area for optimal prediction of the initiation and trajectory of ephemeral gullies. Catena 1999, 37, 377–392. [Google Scholar] [CrossRef]
- Moore, I.D.; Burch, G.J.; Mackenzie, D.H. Topographic effects on the distribution of surface soil water and the location of ephemeral gullies. Trans. ASAE 1988, 31, 1098–1107. [Google Scholar] [CrossRef]
- Vanwalleghem, T.; Poesen, J.; Nachtergaele, J.; Verstraeten, G. Characteristics, controlling factors and importance of deep gullies under cropland on loess-derived soils. Geomorphology 2005, 69, 76–91. [Google Scholar] [CrossRef]
- Zhang, K. A study on characteristic value of shallow gully erosion genesis on slope farmland in the leess plateau. J. Soil Water Conserv. 1991, 2, 8–13. (In Chinese) [Google Scholar]
- Bin-Bing, L.I.; Zheng, F.L.; Zhang, P. Geomorphic threshold determination for ephemeral gully and gully erosion areas in the loess hilly gully region. Bull. Soil Water Conserv. 2008, 5, 16–20. [Google Scholar]
- Gang, H.U.; Yong Qiu, W.U.; Liu, B.Y.; Zhang, Y.G.; Wei, X. Geomorphic threshold model for ephemeral gully incision in rolling hills with black soil in northeast china. Sci. Geogr. Sin. 2006, 26, 449–454. (In Chinese) [Google Scholar]
- Capra, A.; Porto, P.; Scicolone, B. Relationships between rainfall characteristics and ephemeral gully erosion in a cultivated catchment in sicily (Italy). Soil Tillage Res. 2009, 105, 77–87. [Google Scholar] [CrossRef]
- Wilson, G. Understanding soil-pipe flow and its role in ephemeral gully erosion. Hydrol. Process. 2011, 25, 2354–2364. [Google Scholar] [CrossRef]
- Wilson, G.V.; Rigby, J.R.; Dabney, S.M. Soil pipe collapses in a loess pasture of goodwin creek watershed, mississippi: Role of soil properties and past land use. Earth Surf. Process. Landf. 2015, 40, 1448–1463. [Google Scholar] [CrossRef]
- Zheng, F.; Kang, S. Erosion and sediment yield in different zones of loess slopes. Chin. Geogr. Sci. 1998, 53, 422–428. (In Chinese) [Google Scholar]
- Keli, Z. A studay on distribution of erosion and sediment yield on loess slope and the relationship between the distribution and rain characteristics. J. Sediment Res. 1991, 4, 39–46. (In Chinese) [Google Scholar]
- Woodward, D.E. Method to predict cropland ephemeral gully erosion. Catena 1999, 37, 393–399. [Google Scholar] [CrossRef]
- Daggupati, P.; Sheshukov, A.Y.; Douglas-Mankin, K.R. Evaluating ephemeral gullies with a process-based topographic index model. Catena 2014, 113, 177–186. [Google Scholar] [CrossRef]
- Gordon, L.M.; Bennett, S.J.; Bingner, R.L.; Theurer, F.D.; Alonso, C.V. Simulating ephemeral gully erosion in annagnps. Trans. ASABE 2007, 50, 857–866. [Google Scholar] [CrossRef]
- Taguas, E.V.; Yuan, Y.; Bingner, R.L.; Gómez, J.A. Modeling the contribution of ephemeral gully erosion under different soil managements: A case study in an olive orchard microcatchment using the annagnps model. Catena 2012, 98, 1–16. [Google Scholar] [CrossRef]
- Li, H.; Cruse, R.M.; Bingner, R.L.; Gesch, K.R.; Zhang, X. Evaluating ephemeral gully erosion impact on zea mays l. Yield and economics using annagnps. Soil Tillage Res. 2016, 155, 157–165. [Google Scholar] [CrossRef]
- Jiang, Z.S.; Zheng, F.L.; Min, W.U. Prediction model of water erosion on hillslopes. J. Sediment Res. 2005, 4, 1–6. (In Chinese) [Google Scholar]
- Zhang, Y.D.; Shu-Fang, W.U.; Feng, H.; Huo, Y.Y. Experimental study of rill dynamic development process and its critical dynamic conditions on loess slope. J. Sediment Res. 2013, 2, 25–32. (In Chinese) [Google Scholar]
- Miernecki, M.; Wigneron, J.P.; Lopez-Baeza, E.; Kerr, Y.; Jeu, R.D.; Lannoy, G.J.M.D.; Jackson, T.J.; O’Neill, P.E.; Schwank, M.; Moran, R.F. Comparison of smos and smap soil moisture retrieval approaches using tower-based radiometer data over a vineyard field. Remote Sens. Environ. 2014, 154, 89–101. [Google Scholar] [CrossRef]
- Fernandez-Moran, R.; Wigneron, J.P.; Lopez-Baeza, E.; Al-Yaari, A.; Coll-Pajaron, A.; Mialon, A.; Miernecki, M.; Parrens, M.; Salgado-Hernanz, P.M.; Schwank, M. Roughness and vegetation parameterizations at l-band for soil moisture retrievals over a vineyard field. Remote Sens. Environ. 2015, 170, 269–279. [Google Scholar] [CrossRef]
- Wells, R.R.; Momm, H.G.; Bennett, S.J.; Gesch, K.R.; Dabney, S.M.; Cruse, R.; Wilson, G.V. A measurement method for rill and ephemeral gully erosion assessments. Soil Sci. Soc. Am. J. 2016, 80, 203–214. [Google Scholar] [CrossRef]
- Wells, R.R.; Momm, H.G.; Rigby, J.R.; Bennett, S.J.; Bingner, R.L.; Dabney, S.M. An empirical investigation of gully widening rates in upland concentrated flows. Catena 2013, 101, 114–121. [Google Scholar] [CrossRef]
- Gessesse, G.D.; Fuchs, H.; Mansberger, R.; Klik, A.; Rieke-Zapp, D.H. Assessment of erosion, deposition and rill development on irregular soil surfaces using close range digital photogrammetry. Photogramm. Rec. 2010, 25, 299–318. [Google Scholar] [CrossRef]
- Berger, C.; Schulze, M.; Rieke-Zapp, D.; Schlunegger, F. Rill development and soil erosion: A laboratory study of slope and rainfall intensity. Earth Surf. Process. Landf. 2010, 35, 1456–1467. [Google Scholar] [CrossRef]
- Zhang, P.; Zheng, F.; Chen, J.; Wang, B.; Ding, X. Application of high-precision gps to dynamic monitoring gully erosion processes. Trop. Geogr. 2009, 29, 398–406. (In Chinese) [Google Scholar]
- Shellberg, J.G.; Spencer, J.; Brooks, A.P.; Pietsch, T.J. Degradation of the mitchell river fluvial megafan by alluvial gully erosion increased by post-european land use change, queensland, australia. Geomorphology 2016, 266, 105–120. [Google Scholar] [CrossRef]
- Choi, K.; Chang, M.H.; Mi, H.K.; Oh, C.R.; Jung, J.H. Morphologic evolution of macrotidal estuarine channels in gomso bay, west coast of korea: Implications for the architectural development of inclined heterolithic stratification. Mar. Geol. 2013, 346, 343–354. [Google Scholar] [CrossRef]
- Fuller, I.C.; Marden, M. Slope–channel coupling in steepland terrain: A field-based conceptual model from the tarndale gully and fan, waipaoa catchment, new zealand. Geomorphology 2011, 128, 105–115. [Google Scholar] [CrossRef]
- Perroy, R.L.; Bookhagen, B.; Asner, G.P.; Chadwick, O.A. Comparison of gully erosion estimates using airborne and ground-based lidar on santa cruz island, california. Geomorphology 2010, 118, 288–300. [Google Scholar] [CrossRef]
- Peter, K.D.; D’Oleire-Oltmanns, S.; Ries, J.B.; Marzolff, I.; Hssaine, A.A. Soil erosion in gully catchments affected by land-levelling measures in the souss basin, morocco, analysed by rainfall simulation and uav remote sensing data. Catena 2014, 113, 24–40. [Google Scholar] [CrossRef]
- Eltner, A.; Baumgart, P.; Maas, H.G.; Faust, D. Multi-temporal uav data for automatic measurement of rill and interrill erosion on loess soil. Earth Surf. Process. Landf. 2015, 40, 741–755. [Google Scholar] [CrossRef]
- Stöcker, C.; Eltner, A.; Karrasch, P. Measuring gullies by synergetic application of uav and close range photogrammetry—A case study from andalusia, spain. Catena 2015, 132, 1–11. [Google Scholar] [CrossRef]
- Neugirg, F.; Kaiser, A.; Schmidt, J.; Becht, M.; Haas, F. Quantification, analysis and modelling of soil erosion on steep slopes using lidar and uav photographs. Proc. Int. Assoc. Hydrol. Sci. 2015, 367, 51–58. [Google Scholar] [CrossRef]
- Goodwin, N.R.; Armston, J.D.; Muir, J.; Stiller, I. Monitoring gully change: A comparison of airborne and terrestrial laser scanning using a case study from aratula, queensland. Geomorphology 2017, 282, 195–208. [Google Scholar] [CrossRef]
- Li, A.Y.; Wu, X.Q.; Zhu, Q.K. Distribution characteristics and relation with site type of ephemeral gully in loess plateau of northern shaanxi province. J. Northwest A F Univ. 2010, 38, 79–85. (In Chinese) [Google Scholar]
- Zhao, W.J.; Zhi-Chao, X.U.; Zhang, Y.; Zhu, Y.; Zhu, Q.K. Study on distribution of ephemeral gullies in semiarid loess area. Arid Zone Res. 2011, 28, 586–591. (In Chinese) [Google Scholar]
- Maugnard, A.; Dyck, S.V.; Bielders, C.L. Assessing the regional and temporal variability of the topographic threshold for ephemeral gully initiation using quantile regression in wallonia (Belgium). Geomorphology 2014, 206, 165–177. [Google Scholar] [CrossRef]
- Fiorucci, F.; Ardizzone, F.; Rossi, M.; Torri, D. The use of stereoscopic satellite images to map rills and ephemeral gullies. Remote Sens. 2015, 7, 14151–14178. [Google Scholar] [CrossRef]
- Shruthi, R.B.V.; Kerle, N.; Jetten, V. Object-based gully feature extraction using high spatial resolution imagery. Geomorphology 2011, 134, 260–268. [Google Scholar] [CrossRef]
- Shruthi, R.B.V.; Kerle, N.; Jetten, V.; Abdellah, L.; Machmach, I. Quantifying temporal changes in gully erosion areas with object oriented analysis. Catena 2015, 128, 262–277. [Google Scholar] [CrossRef]
- Shruthi, R.B.; Kerle, N.; Jetten, V.; Stein, A. Object-based gully system prediction from medium resolution imagery using random forests. Geomorphology 2014, 216, 283–294. [Google Scholar] [CrossRef]
- Mena, J.B. State of the art on automatic road extraction for gis update: A novel classification. Pattern Recognit. Lett. 2003, 24, 3037–3058. [Google Scholar] [CrossRef]
- Wang, W.; Yang, N.; Zhang, Y.; Wang, F.; Cao, T.; Eklund, P. A review of road extraction from remote sensing images. J. Traffic Transp. Eng. 2016, 3, 271–282. [Google Scholar] [CrossRef]
- Hu, J.; Razdan, A.; Femiani, J.C.; Cui, M.; Wonka, P. Road network extraction and intersection detection from aerial images by tracking road footprints. IEEE Trans. Geosci. Remote Sens. 2007, 45, 4144–4157. [Google Scholar] [CrossRef]
- He, Y.; Wang, H.; Zhang, B. Color-based road detection in urban traffic scenes. IEEE Trans. Intell. Transp. Syst. 2004, 5, 309–318. [Google Scholar] [CrossRef]
- Auclair-Fortier, M.F.; Ziou, D.; Armenakis, C. Survey of work on road extraction in aerial and satellite images. In Proceedings of the 1999 USENIX Annual Technical Conference, Monterey, CA, USA, 6–11 June 1999. [Google Scholar]
- Kluge, K. Extracting road curvature and orientation from image edge points without perceptual grouping into features. In Proceedings of the Intelligent Vehicles ’94 Symposium, Paris, France, 24–26 October 1994; pp. 109–114. [Google Scholar]
- Yang, X.; Li, M.; Na, J.; Liu, K. Gully boundary extraction based on multidirectional hill-shading from high-resolution dems. Trans. Gis 2017, 1–13. [Google Scholar] [CrossRef]
- Yan, S.J.; Tang, G.A.; Li, F.Y.; Zhang, L. Snake model for the extraction of loess shoulder-line from dems. J. Mt. Sci. 2014, 11, 1552–1559. [Google Scholar] [CrossRef]
- Jiang, S.; Tang, G.; Liu, K. A new extraction method of loess shoulder-line based on marr-hildreth operator and terrain mask. PLoS ONE 2015, 10, e0123804. [Google Scholar] [CrossRef] [PubMed]
- Kai, L.; Hu, D.; Guoan, T.; A-Xing, Z.; Xin, Y.; Sheng, J.; Jianjun, C. An object-based approach for two-level gully feature mapping using high-resolution dem and imagery: A case study on hilly loess plateau region, china. Chin. Geogr. Sci. 2017, 27, 415–430. [Google Scholar]
- Kai, L.; Hu, D.; Guoan, T.; Jiaming, N.; Xiaoli, H.; Zhengguang, X.; Xin, Y.; Fayuan, L. Detection of catchment-scale gully-affected areas using unmanned aerial vehicle (uav) on the chinese loess plateau. ISPRS Int. J. Geo-Inf. 2016, 5, 238. [Google Scholar]
- Pal, N.R.; Pal, S.K. A review on image segmentation techniques. Pattern Recognit. 1993, 26, 1277–1294. [Google Scholar] [CrossRef]
- Rong, W.; Li, Z.; Zhang, W.; Sun, L. An improved canny edge detection algorithm. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 3–6 August 2014; pp. 577–582. [Google Scholar]
- Clode, S.; Rottensteiner, F.; Kootsookos, P.; Zelniker, E. Detection and vectorization of roads from lidar data. Photogramm. Eng. Remote Sens. 2007, 73, 517–535. [Google Scholar] [CrossRef]
- Li, M.; Stein, A.; Bijker, W.; Zhan, Q. Region-based urban road extraction from vhr satellite images using binary partition tree. Int. J. Appl. Earth Obs. Geoinf. 2016, 44, 217–225. [Google Scholar] [CrossRef]
- Poesen, J.; Nachtergaele, J.; Verstraeten, G.; Valentin, C. Gully erosion and environmental change: Importance and research needs. Catena 2003, 50, 91–133. [Google Scholar] [CrossRef]
- Perciano, T.; Tupin, F.; Hirata, R., Jr.; Cesar, R.M., Jr. A two-level markov random field for road network extraction and its application with optical, sar, and multitemporal data. Int. J. Remote Sens. 2016, 37, 3584–3610. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Area | Position (WGS84) | Area (km2) | Altitude (m) | Remote Sensing Image | Ephemeral Gully Characteristics |
|---|---|---|---|---|---|
| T1 (Jingbian) | 37°28′49″–37°28′59″ N; 108°48′2″–108°48′35″ E | 0.23 | 1348–1556 | Images from Pléiades with 0.5 m spatial resolution | Nearly north-south direction. Locating at one side slope of valley. Length ranges from 16 m to 96 m with average space interval of 10 m. |
| T2 (Dingbian) | 37°12′30″–37°13′03″ N; 108°01′09″–108°1′43″ E | 0.27 | 1438–1630 | Images from Google Earth with 0.5 m spatial resolution. | Gentle northeast-southwest direction. Obvious difference in numbers and length on both sides of the valley. Average length is 59 m in one slope side. About 15 m of space interval of ephemeral gully. |
| T3 (Huanxian) | 36°12′31″–36°13′17″ N; 107°12′42″–07°13′03″ E | 0.39 | 1409–1581 | Images from Google Earth with 0.5 m spatial resolution. | West-east direction. Length ranges from 19 m to 109 m with an average of 66 m. Average space interval is about 13 m. |
| Length Threshold (m) | TP | FN | FP | Correctness | Completeness | Quality | Length Rate |
|---|---|---|---|---|---|---|---|
| 5 | 86 | 0 | 215 | 28.57% | 100.00% | 28.57% | 69.60% |
| 7.5 | 46 | 8 | 87 | 34.59% | 85.19% | 32.62% | 50.66% |
| 8 | 43 | 8 | 77 | 35.83% | 84.31% | 33.59% | 48.71% |
| 8.5 | 42 | 9 | 68 | 38.18% | 82.35% | 35.29% | 47.96% |
| 9 | 38 | 10 | 61 | 38.38% | 79.17% | 34.86% | 44.97% |
| 9.5 | 35 | 12 | 56 | 38.46% | 74.47% | 33.98% | 42.64% |
| 10 | 32 | 12 | 52 | 38.10% | 72.73% | 33.33% | 39.92% |
| 10.5 | 27 | 13 | 39 | 40.91% | 67.50% | 34.18% | 36.55% |
| 11 | 26 | 14 | 36 | 41.94% | 65.00% | 34.21% | 35.70% |
| 11.5 | 24 | 16 | 36 | 40.00% | 60.00% | 31.58% | 33.84% |
| 12 | 22 | 16 | 32 | 40.74% | 57.89% | 31.43% | 31.76% |
| 12.5 | 20 | 17 | 29 | 40.82% | 54.05% | 30.30% | 29.47% |
| 13 | 18 | 18 | 24 | 42.86% | 50.00% | 30.00% | 27.53% |
| 13.5 | 14 | 21 | 23 | 37.84% | 40.00% | 24.14% | 23.07% |
| 14 | 12 | 21 | 22 | 35.29% | 36.36% | 21.82% | 20.67% |
| 14.5 | 9 | 23 | 22 | 29.03% | 28.13% | 16.67% | 17.09% |
| 15 | 8 | 24 | 22 | 26.67% | 25.00% | 14.81% | 15.68% |
| 17.5 | 7 | 25 | 19 | 26.92% | 21.88% | 13.73% | 14.20% |
| 20 | 7 | 25 | 12 | 36.84% | 21.88% | 15.91% | 14.20% |
| Areas | Length Threshold | Correctness | Completeness | Quality | Length Rate |
|---|---|---|---|---|---|
| T1 (Jingbian) | 8.5 | 38.18% | 82.35% | 35.29% | 47.96% |
| T2 (Dingbian) | 12.5 | 71.11% | 91.43% | 66.67% | 71.44% |
| T3 (Huanxian) | 15 | 85.05% | 92.86% | 79.82% | 46.41% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Dai, W.; Tang, G.; Li, M. Deriving Ephemeral Gullies from VHR Image in Loess Hilly Areas through Directional Edge Detection. ISPRS Int. J. Geo-Inf. 2017, 6, 371. https://doi.org/10.3390/ijgi6110371
Yang X, Dai W, Tang G, Li M. Deriving Ephemeral Gullies from VHR Image in Loess Hilly Areas through Directional Edge Detection. ISPRS International Journal of Geo-Information. 2017; 6(11):371. https://doi.org/10.3390/ijgi6110371
Chicago/Turabian StyleYang, Xin, Wen Dai, Guoan Tang, and Min Li. 2017. "Deriving Ephemeral Gullies from VHR Image in Loess Hilly Areas through Directional Edge Detection" ISPRS International Journal of Geo-Information 6, no. 11: 371. https://doi.org/10.3390/ijgi6110371
APA StyleYang, X., Dai, W., Tang, G., & Li, M. (2017). Deriving Ephemeral Gullies from VHR Image in Loess Hilly Areas through Directional Edge Detection. ISPRS International Journal of Geo-Information, 6(11), 371. https://doi.org/10.3390/ijgi6110371