1. Introduction
Mobile devices, including wearable items, are increasingly popular and affordable, and are widely used in various fields and for various applications, such as sports monitoring and management, healthcare, Location-Based Services (LBS), and navigation [
1,
2]. The demand for LBS for pedestrians in both indoor and outdoor environments has also increased dramatically. Location and navigation technologies using the Global Navigation Satellite Systems (GNSS) are highly reliable and accurate in open, outdoor spaces. However, GNSS signals are not always available, especially in GNSS-denied environments, such as indoor environments, underground, and in urban areas. The problem of navigation in urban areas can be mitigated by integrating GNSS with the Inertial Navigation System (INS) [
3,
4]. Nevertheless, since GNSS signals are not available indoors, various navigation methods relying on different technologies, such as proximity, triangulation, fingerprinting, and dead reckoning, have been proposed [
5]. Since the dead reckoning method requires little or no infrastructure to be pre-installed in buildings, Pedestrian Dead Reckoning (PDR) systems have become a popular solution to indoor positioning and navigation [
6,
7].
Dead reckoning methods use inertial sensors, accelerometers, and gyroscopes to estimate a relative location and derive a current location by adding the estimated displacement based on data for distance and heading in relation to a previously estimated location. The moving distance and heading of the user can be acquired from an INS or Step-and-Heading System (SHS) [
2]. An INS is a self-contained system [
7], which means no other external signal is required, and it continuously calculates the position, orientation, and velocity of a moving object by integrating data from an accelerometer, gyroscope, and magnetometer. However, the inertial sensors have a drifting problem, in which errors accumulate over time. Moreover, most high-end inertial sensors are expensive and over-sized for most consumers. This larger size makes it more difficult to carry or wear. Meanwhile, a SHS is also a self-contained system that is used by pedestrians. It simplifies the complex computing of an INS and uses only an accelerometer and gyroscope to estimate the step count, step distance, and heading of the user. Both a gyroscope and a magnetometer can be used to derive the heading of the user, but these two sensors have drawbacks with regard to indoor positioning and navigation. A heading derived from a gyroscope suffers from the drifting problem and ends up accumulating errors over time. The drifts of a gyroscope can be reduced with the use of a rigorous calibration procedure or corrected via other methods such as fingerprinting [
8] or map-matching [
9,
10,
11]. A magnetometer measures the magnitudes of the Earth’s magnetic field to estimate the heading of a user, but indoors this is influenced by natural and man-made sources of magnetism. Magnetic field variations inside buildings can be found in iron, cobalt, or nickel. It could also occur from other manmade sources such as steel structures, electric power systems, and electronic appliances [
12,
13]. This is the main reason why magnetometers were not adopted to aid with heading estimation. However, there are some studies that have adopted magnetic fingerprints and utilized the anomalies in the magnetic field inside a building, which are assumed to be static and have sufficient local variability, to achieve global indoor self-localization [
13,
14].
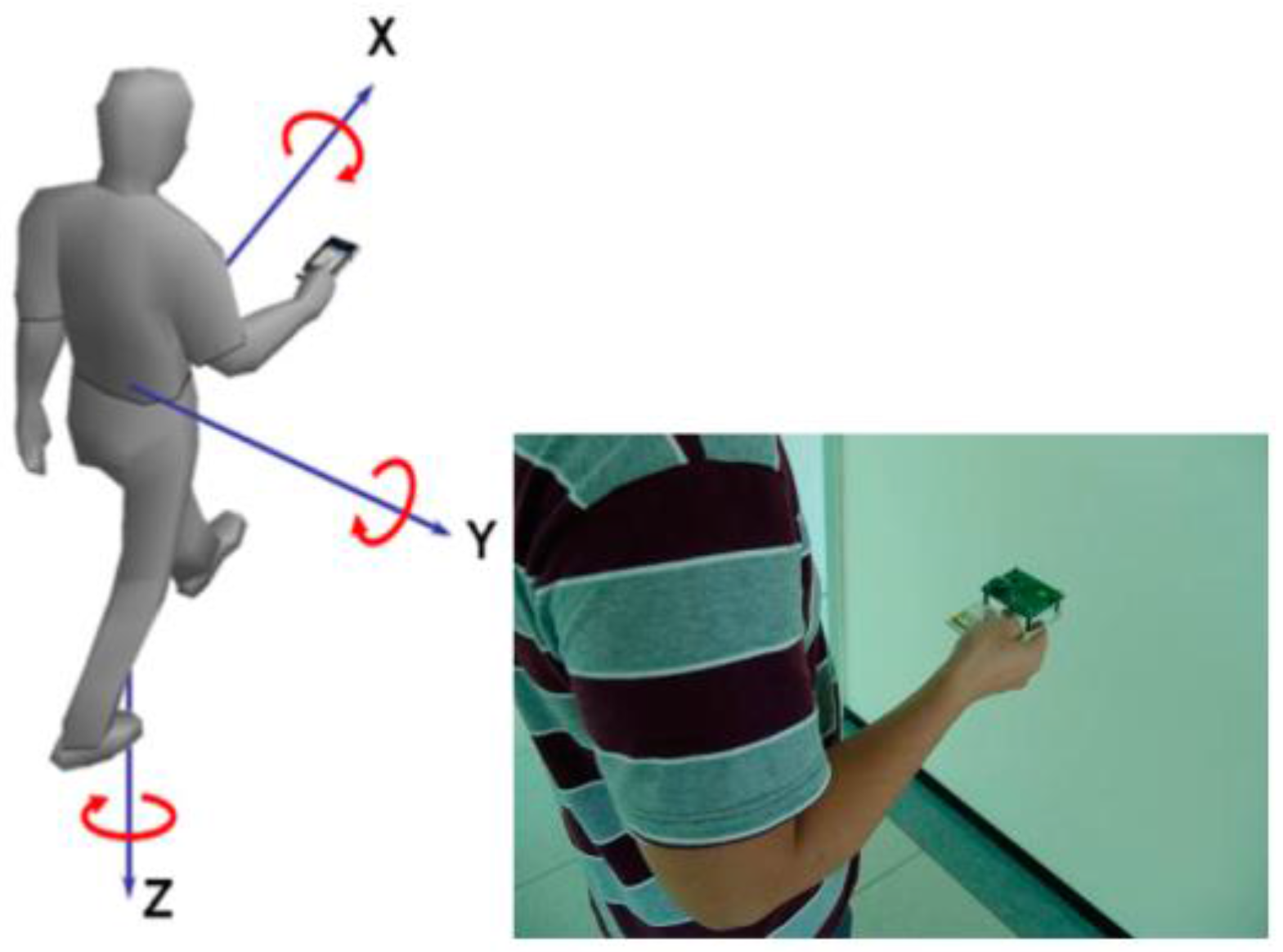
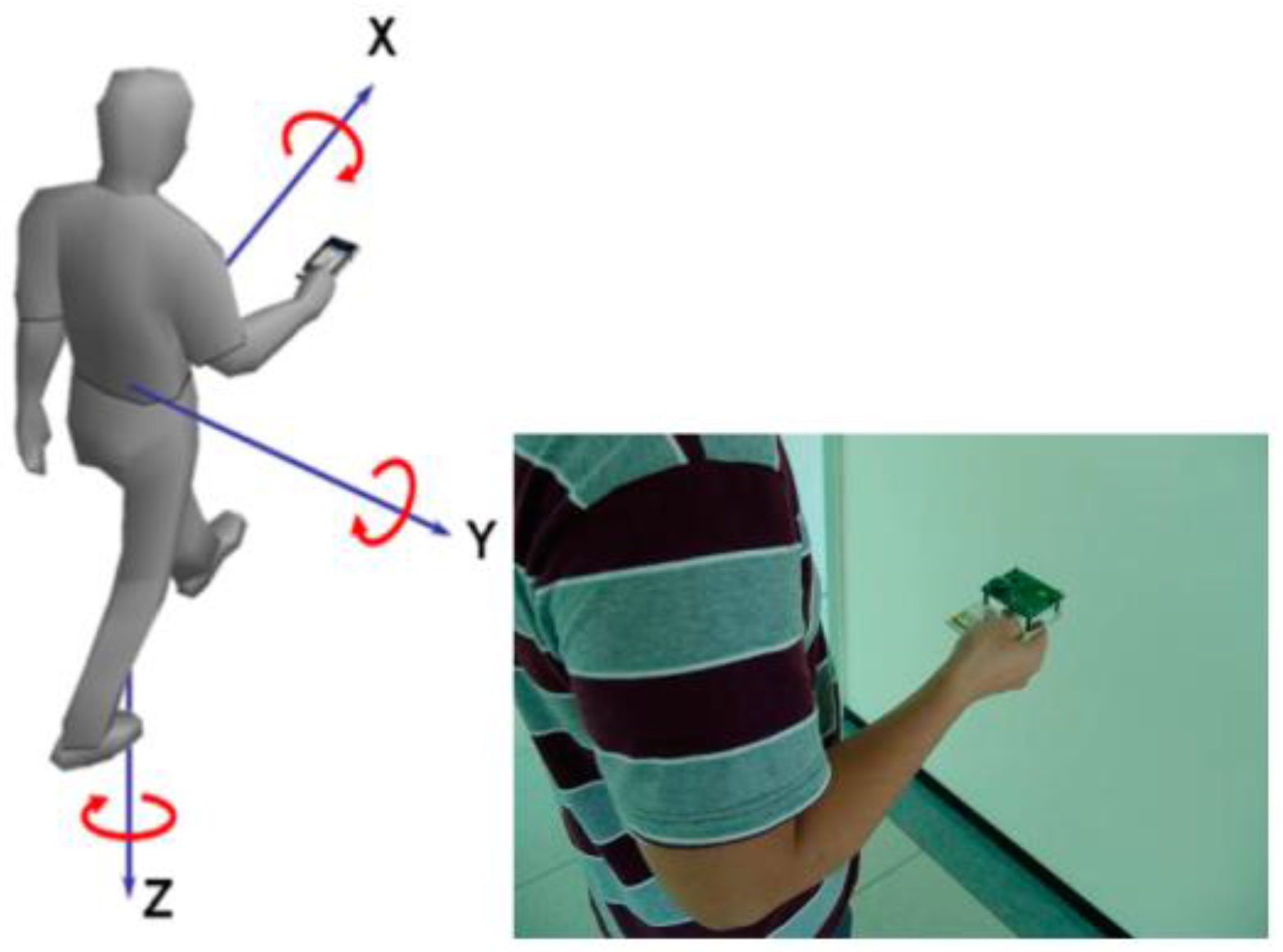
With the rapid progress in mobile and wearable devices, inertial sensors are now commonly used in high-end devices like smartphones, which are theoretically suitable for PDR systems. The position of the inertial sensors on the body, such as a user’s hand [
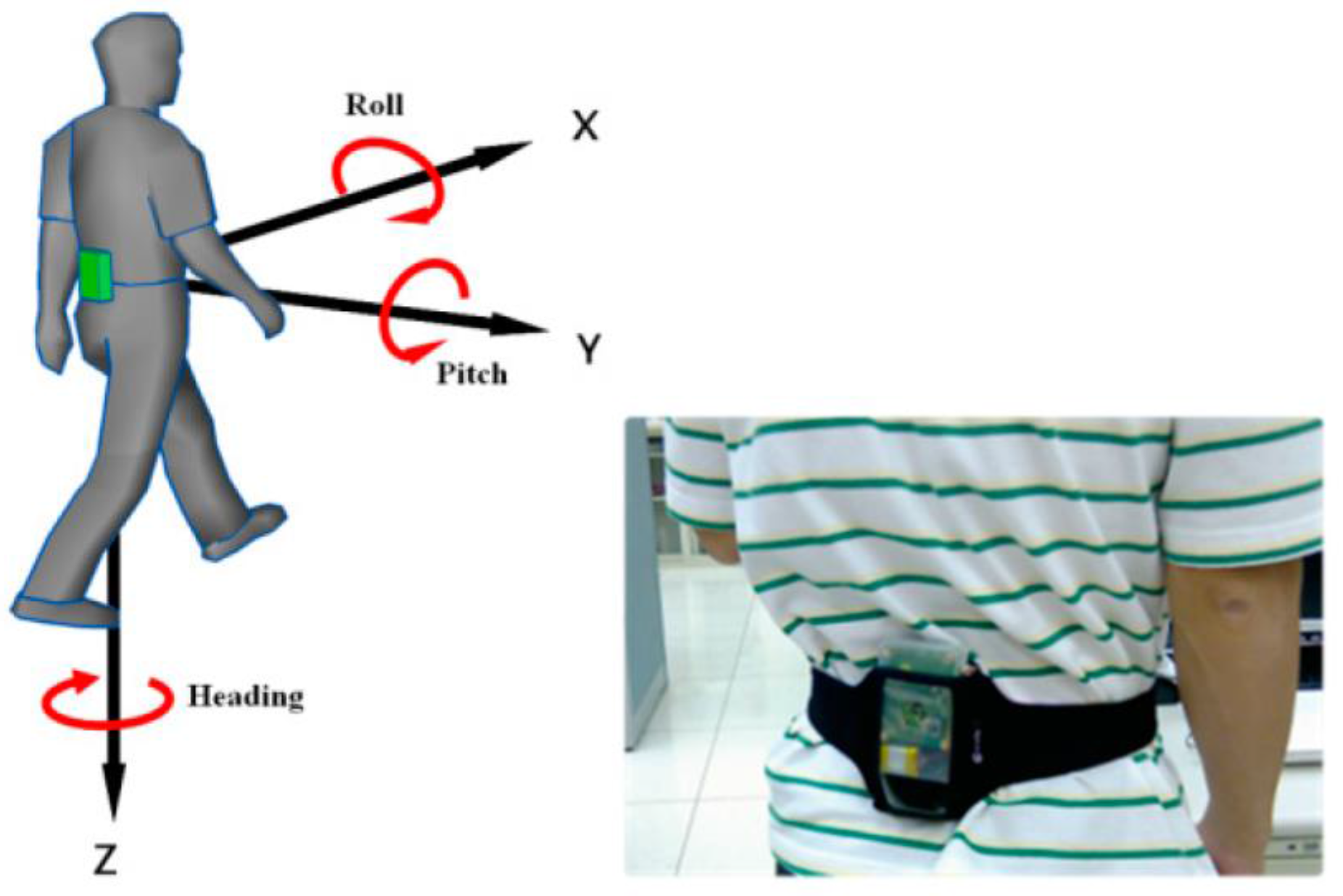
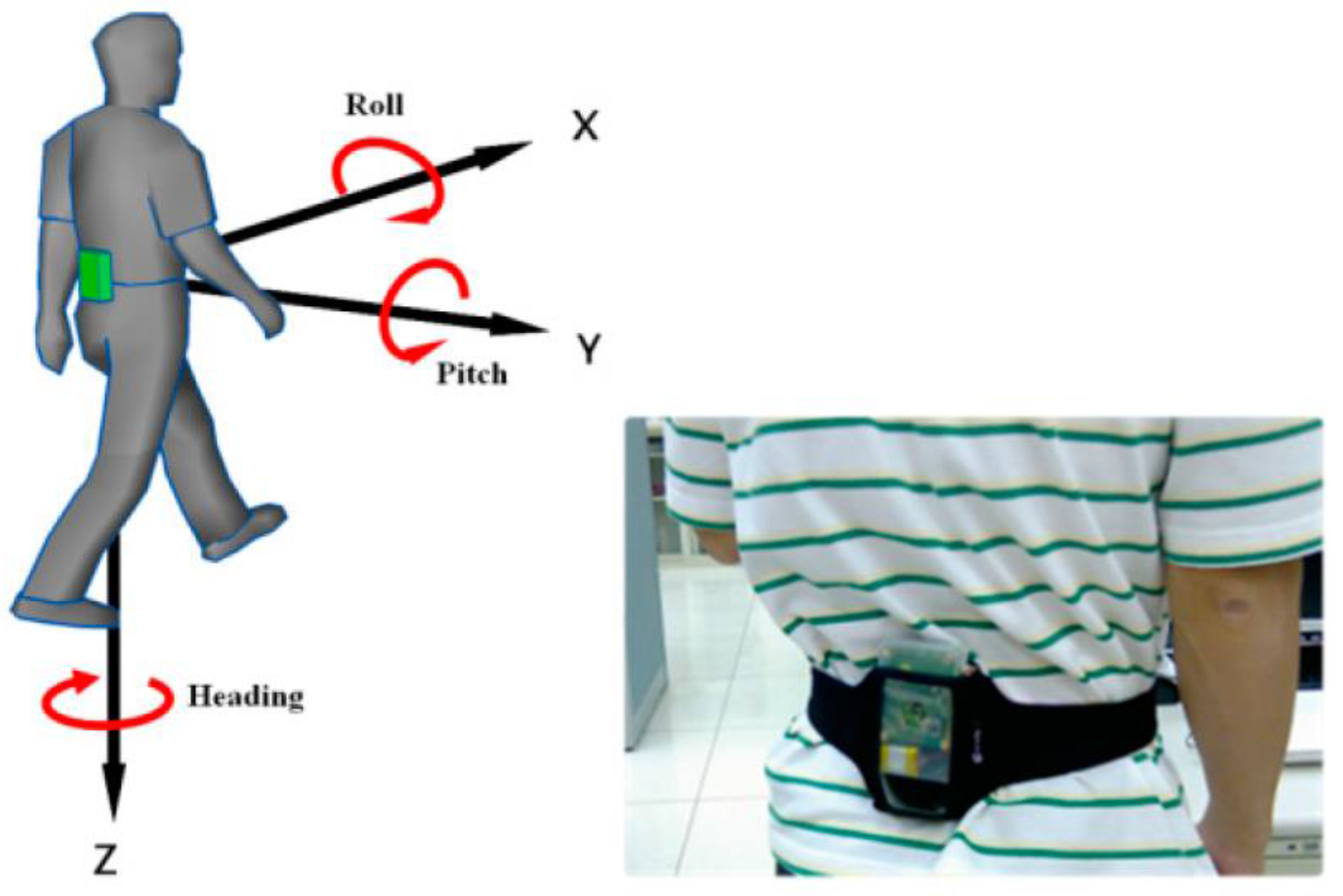
15], waist [
16], pocket [
17], and foot [
18,
19], has a significant influence on the accuracy, reliability, and usage of the PDRs. Moreover, due to advances in Micro Electro Mechanical Systems (MEMS) technology, wearable and miniature inertial sensors based on this have become the main sensors used for PDR. However, due to cost considerations, most consumer electronics adopt low-cost MEMS sensors, which have lower performance and generate more noise as compared to more expensive devices. Therefore, the integration and combination of different sensors and algorithms are required to enhance the accuracy and usability of PDR with low-cost sensors. Moreover, the sensor errors of low cost sensors also need to be calibrated [
20,
21].
Regarding the moving distance of the user, Step Length Estimation (SLE) algorithms based on accelerometers have been successfully implemented in PDR in many studies [
21,
22,
23]. The SLE algorithms can be divided into model- and knowledge-based methods. The former can be categorized into two groups, one being based on biomechanical models and the other being based on empirical relationships [
21]. An inverted pendulum model for the motion of the pelvis during a step was proposed by Zijlstra
et al. [
24,
25]. However, this model requires details of leg length and is sensitive to user calibrations. To overcome these drawbacks, an approximated model which does not require leg length information was proposed by Weinberg
et al. [
26]. It estimates the dynamic step length from the vertical displacement of the pelvis. However, the results they reported show that step length can vary by as much as 40% between pedestrians walking at the same speed, and up to 50% across the range of walking speeds of individuals [
2]. Weinberg
et al. presented a strap-down waist-worn PDR system based on the model they proposed; experimental results showed that the maximum relative errors were between 4.23% to 18.44%, and the average errors were between 3% and 8% [
16].
Now, with regard to the knowledge-based methods, Artificial Neural Networks (ANN) and Fuzzy Logic (FL) are the primary algorithms employed [
27]. A GNSS/INS navigation system was proposed using a knowledge-based method to model human locomotion, and the adopted sensors of this system are continuously calibrated when GNSS signals are available [
28]. There are six parameters that contain the information about a step length. They are step frequency, peak-to-peak mean acceleration, peak-to-peak variation in acceleration, terrain slope, change in barometric height during a single gait cycle, and subject’s height [
28]. The results showed that the accuracy of this system is 3–5 m CEP (circular error probable) 50%. However, the study in [
28] required high-performance GNSS and INS devices to calibrate its models, and the computing load of the proposed algorithms would simply not be feasible for low-cost embedded systems.
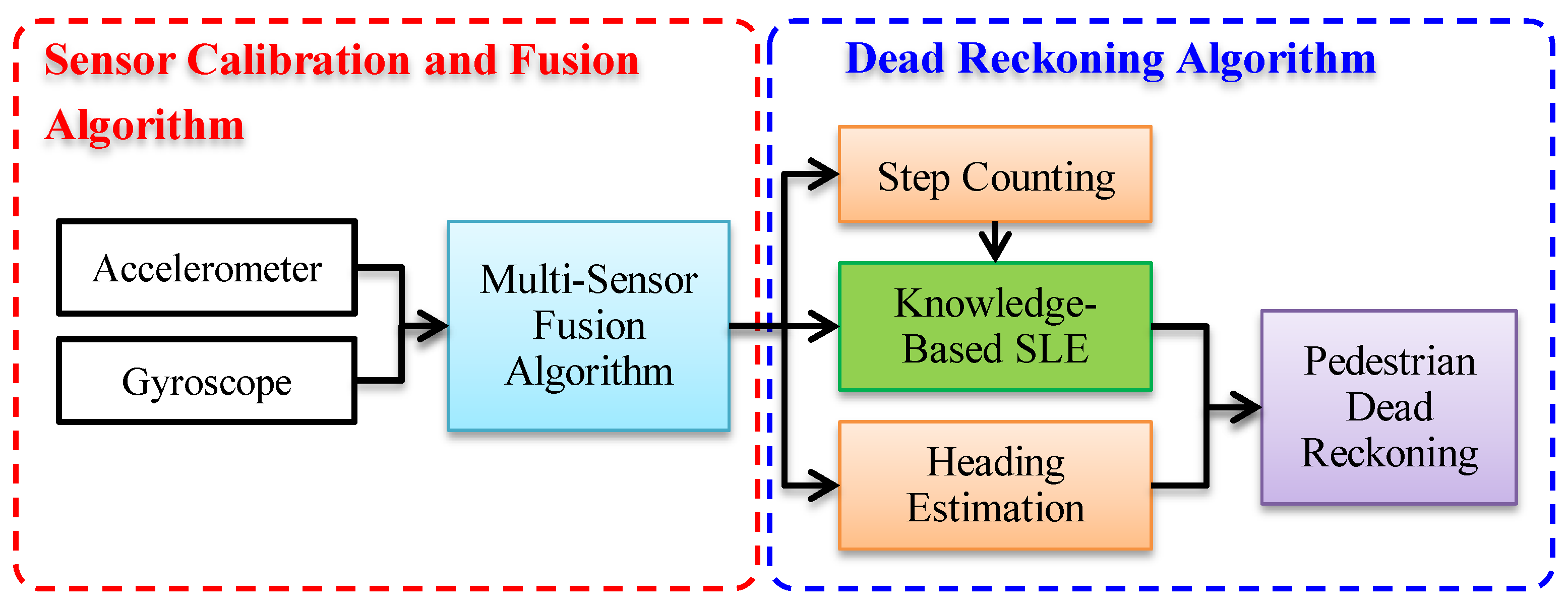
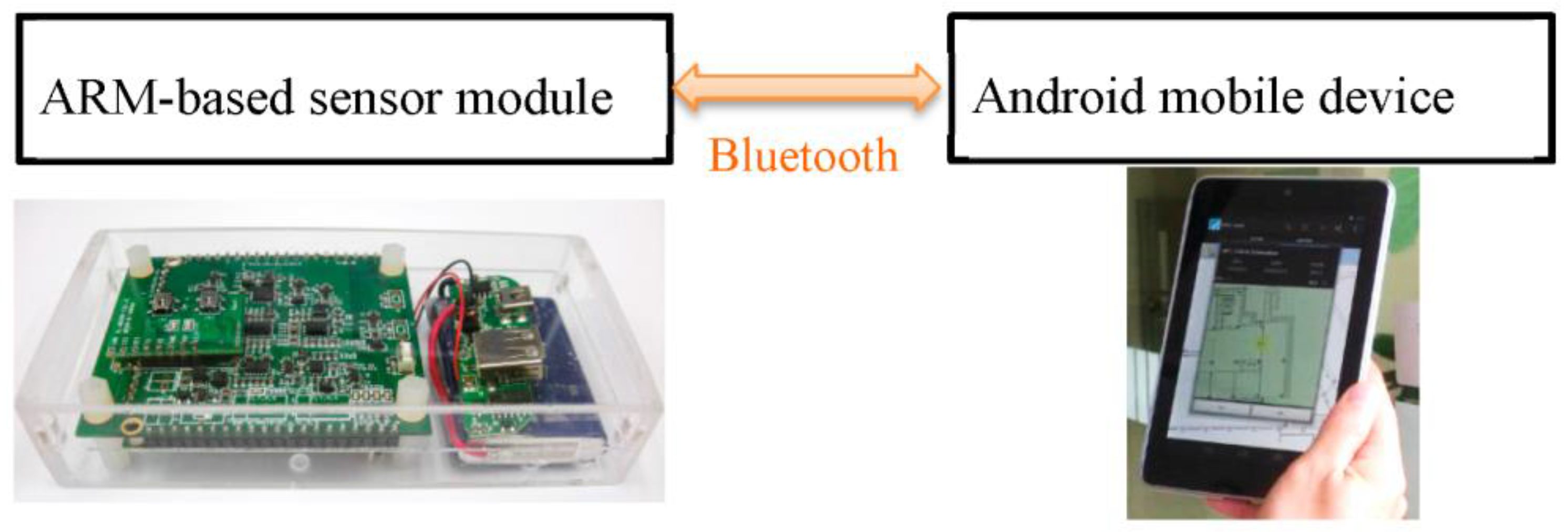
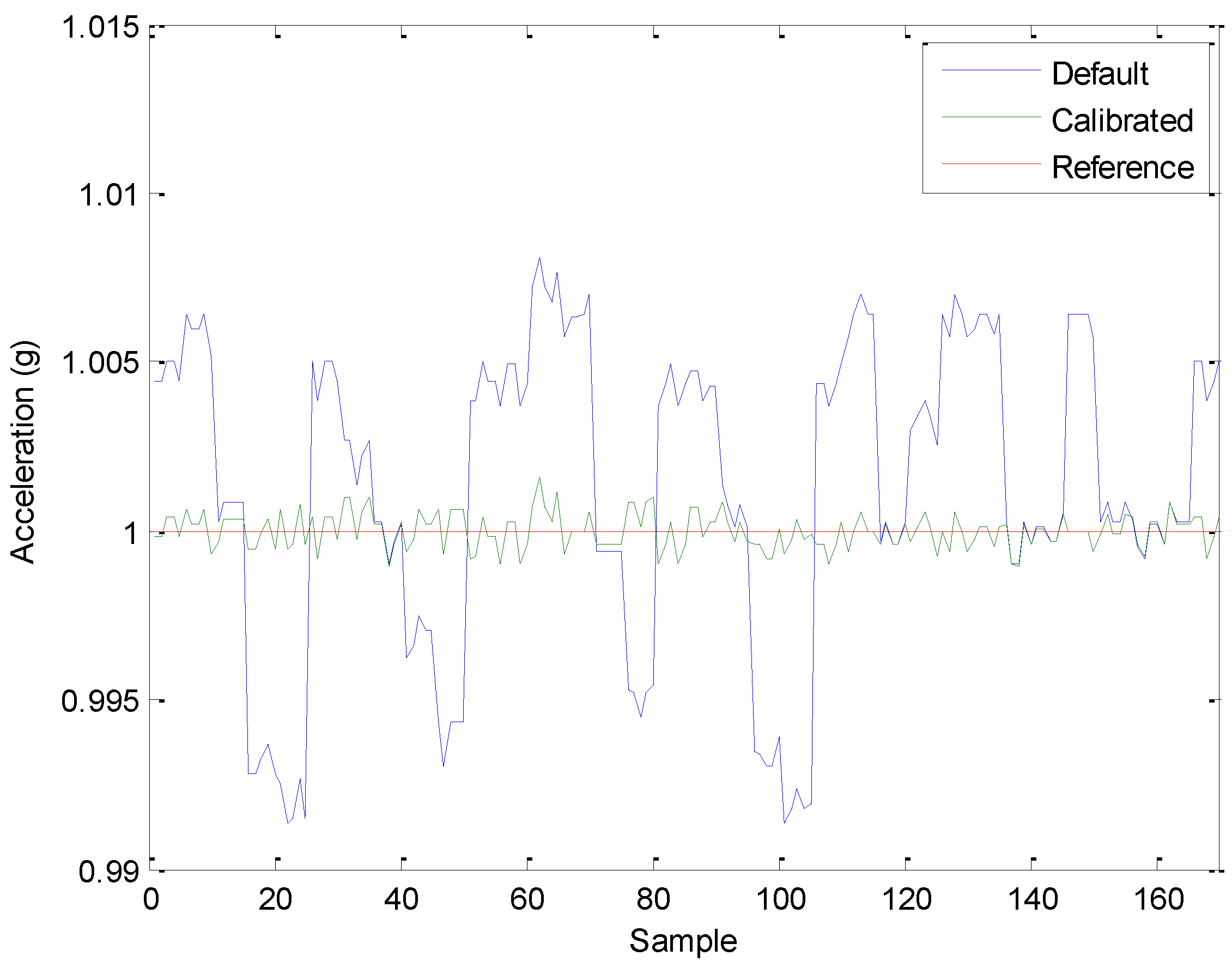
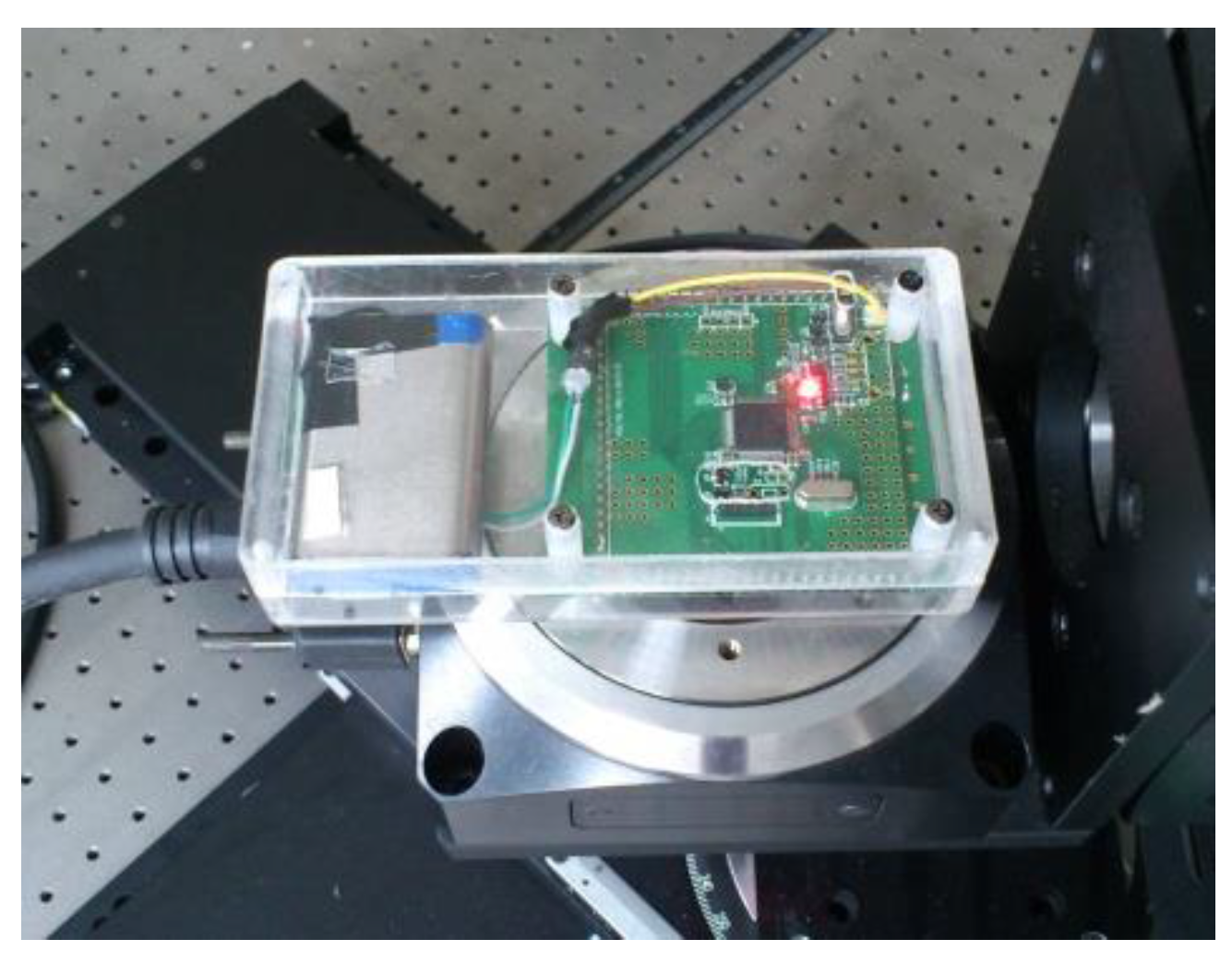
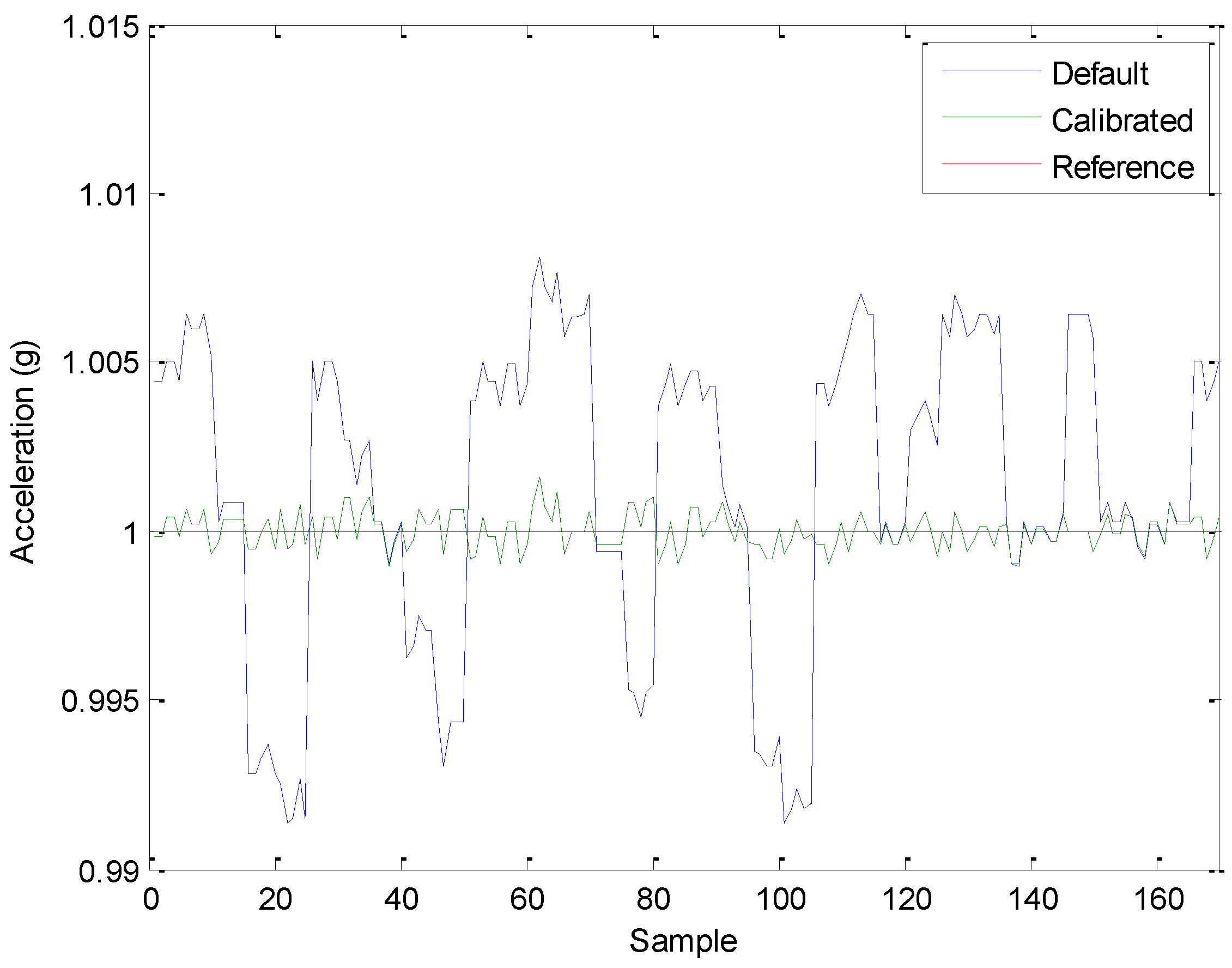
The objective of this study is to develop an accurate and usable SLE method for PDR system with the features of a wide range of SLE, a self-contained system, and real-time computing. In order to achieve a self-contained capability, an inertial sensor module has been developed, and the sensor errors of this module are calibrated with a sensor calibration procedure based on the scalar calibration as well as the least squares method to improve the accuracy of the inertial sensors [
29]. The applied parameters in this study are scale factors, biases, and orthogonalization angles. Other generalized calibration schemes for low-cost Inertial Measurement Unit (IMU) and smartphone sensors can be found in the studies [
30,
31]. With this calibrated inertial data in hand, a PDR system based on multi-sensor fusion and FL SLE algorithms has been developed. Essentially, the strengths of FL are its reduction of the depth and complexity of computations, and its improvement of accuracy and simplification of the positioning algorithm through the use of a relatively simple heuristic, which determines a combination of the most appropriate rules. Keep in mind that an advanced indoor navigation system attempting to determine the necessary information through pure number crunching, with a required high computational complexity, would likely cause a complete battery drain within a few hours, especially for portable and wearable devices. Additionally, since FL is comprised of linguistic rules, it can be easily implemented into most Micro Processing Units (MCUs) to fulfill the requirement of real-time computing. These are the reasons why FL has been chosen to be the SLE method in this study. With the advantages of FL and PDR, the method proposed herein is easy to implement on waist-mounted wearable devices in real time and is suitable for the indoor and outdoor environments considered in this study without the need for map information and any pre-installed infrastructure.
6. Conclusions
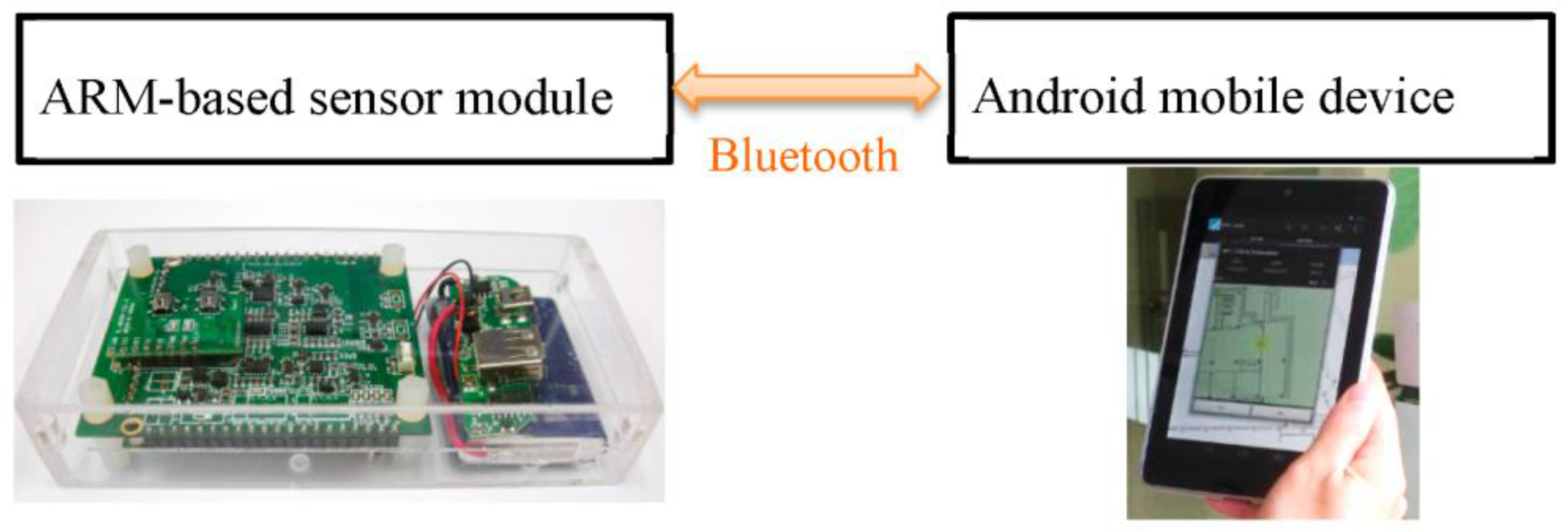
An accurate and usable SLE method for the PDR system with the features of a wide range of step lengths, a self-contained system, and real-time computing, based on the multi-sensor fusion and FL algorithms, has been proposed in this study. In order to achieve a self-contained capability, a portable and wearable inertial sensor module was developed using low-cost inertial sensors, a gyroscope, and an accelerometer, and it was based on the MEMS. Since the low-cost MEMS sensors suffer from various errors, the sensor errors of this module were calibrated with a sensor calibration procedure to improve the accuracy of the inertial sensors.
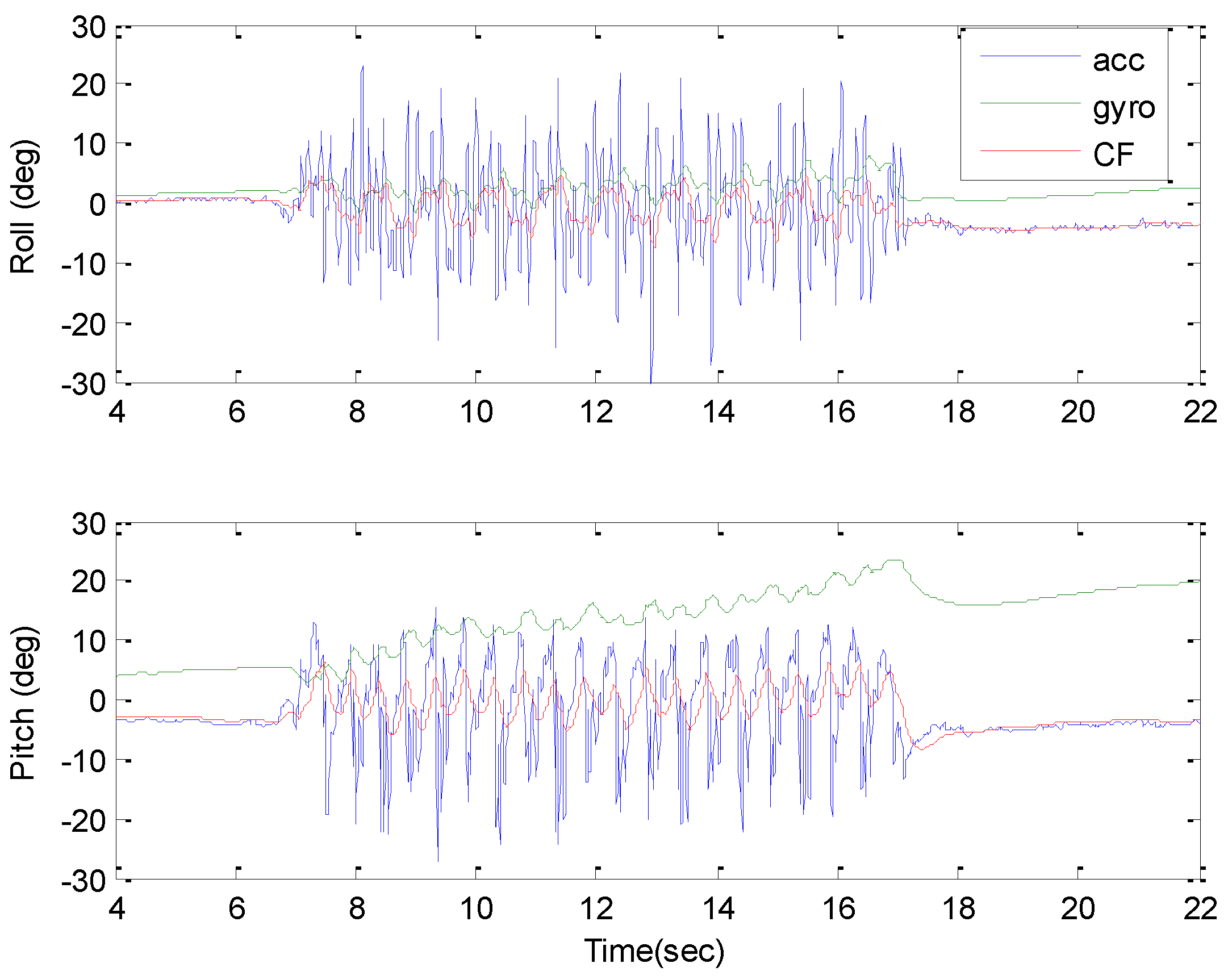
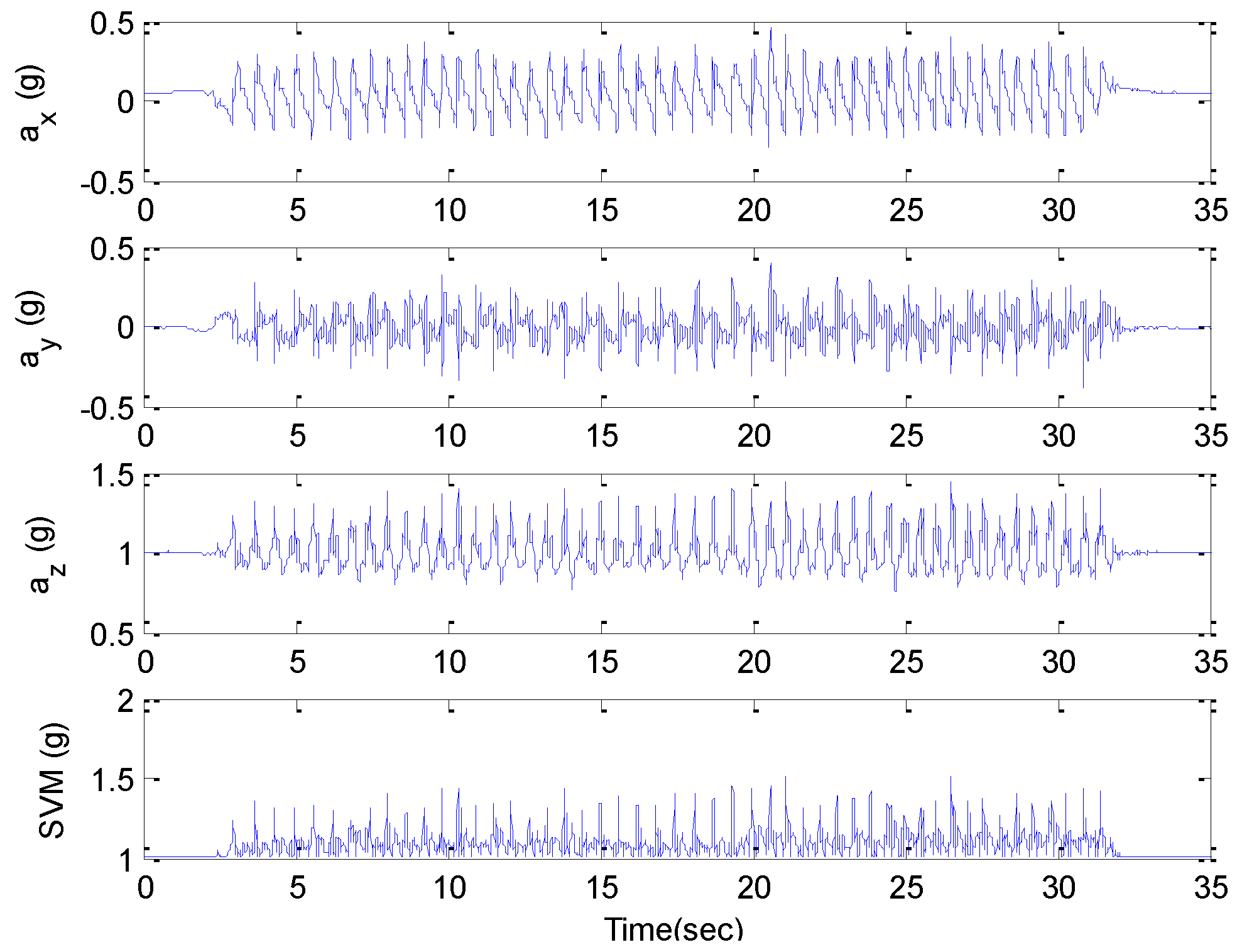
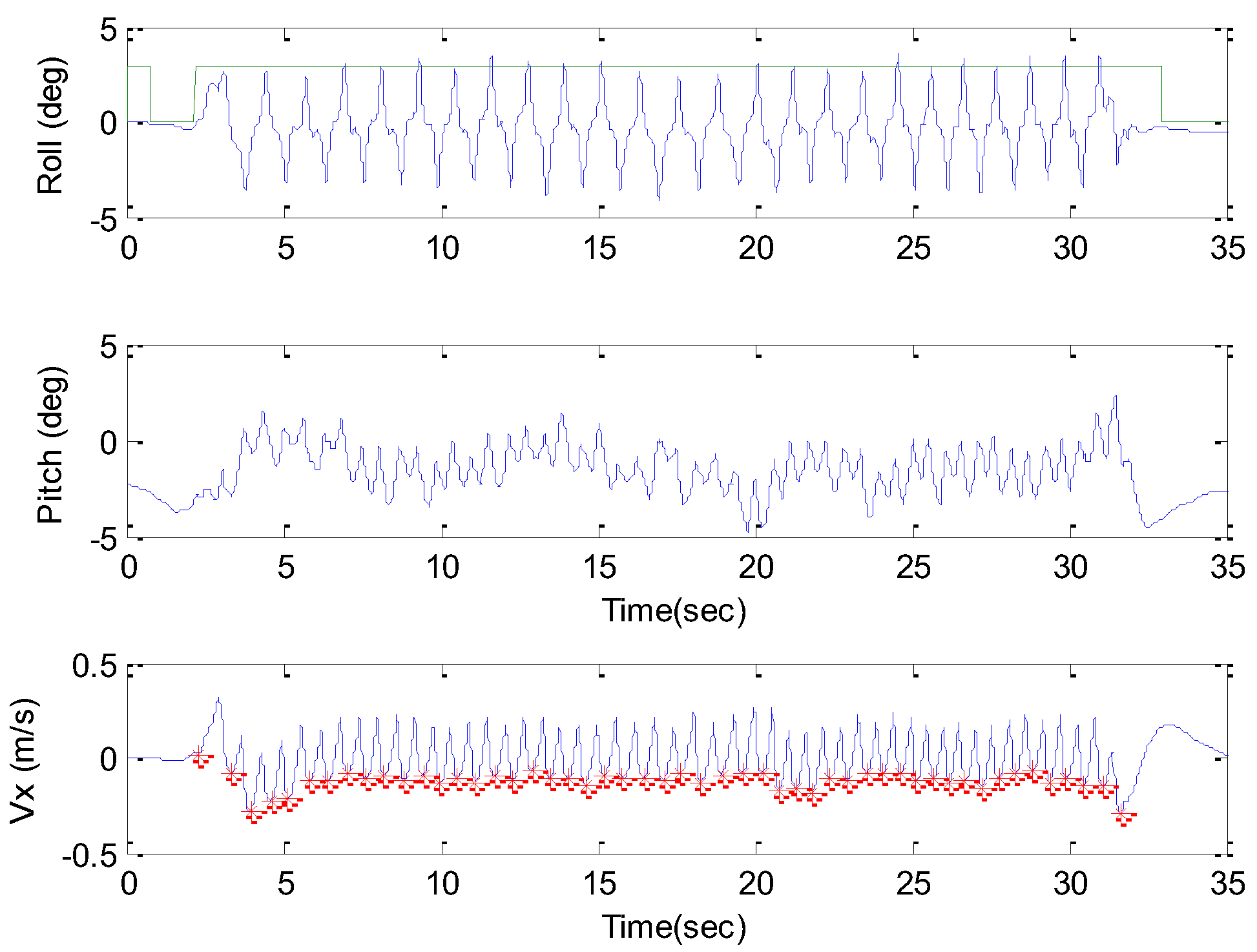
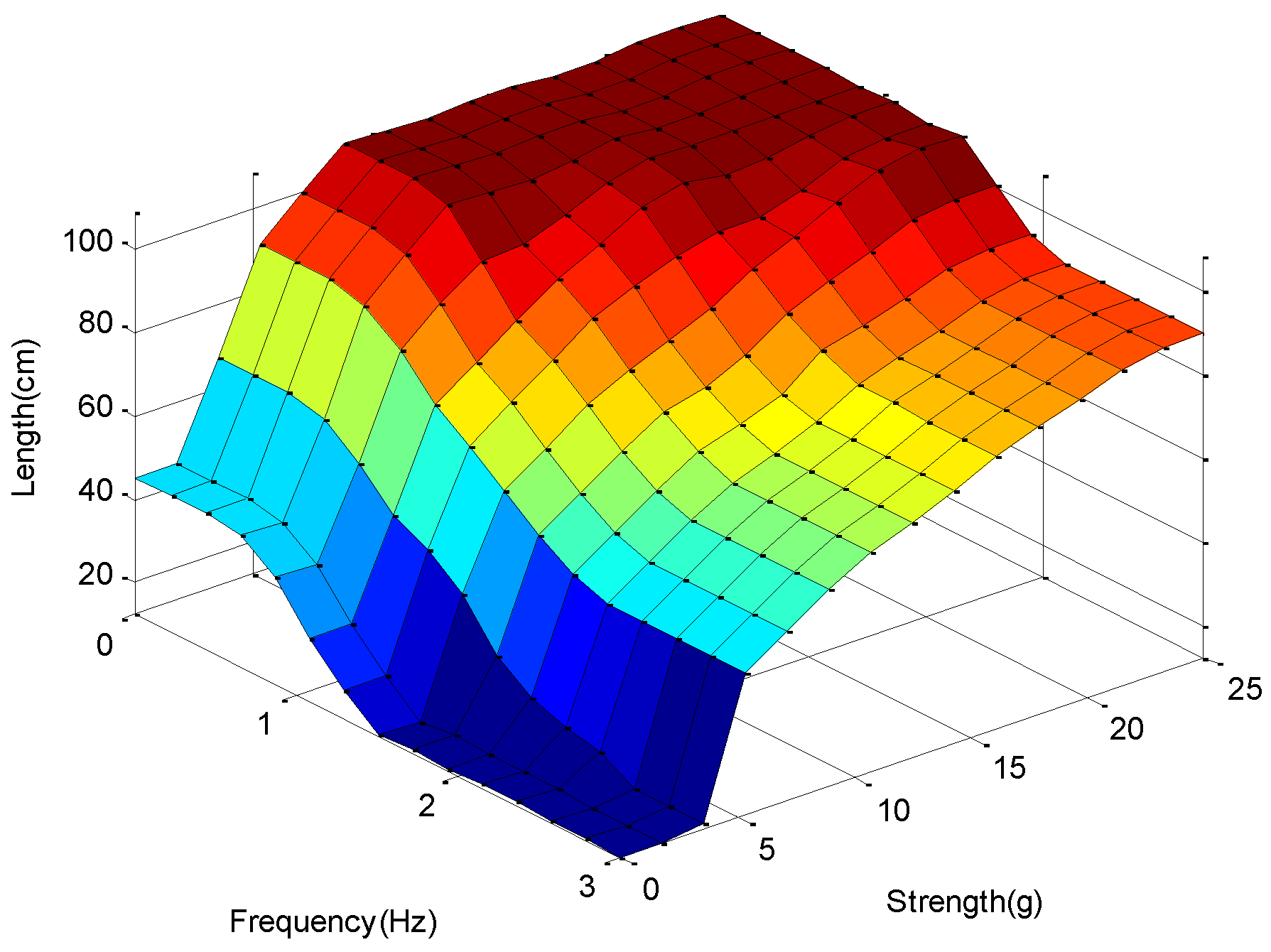
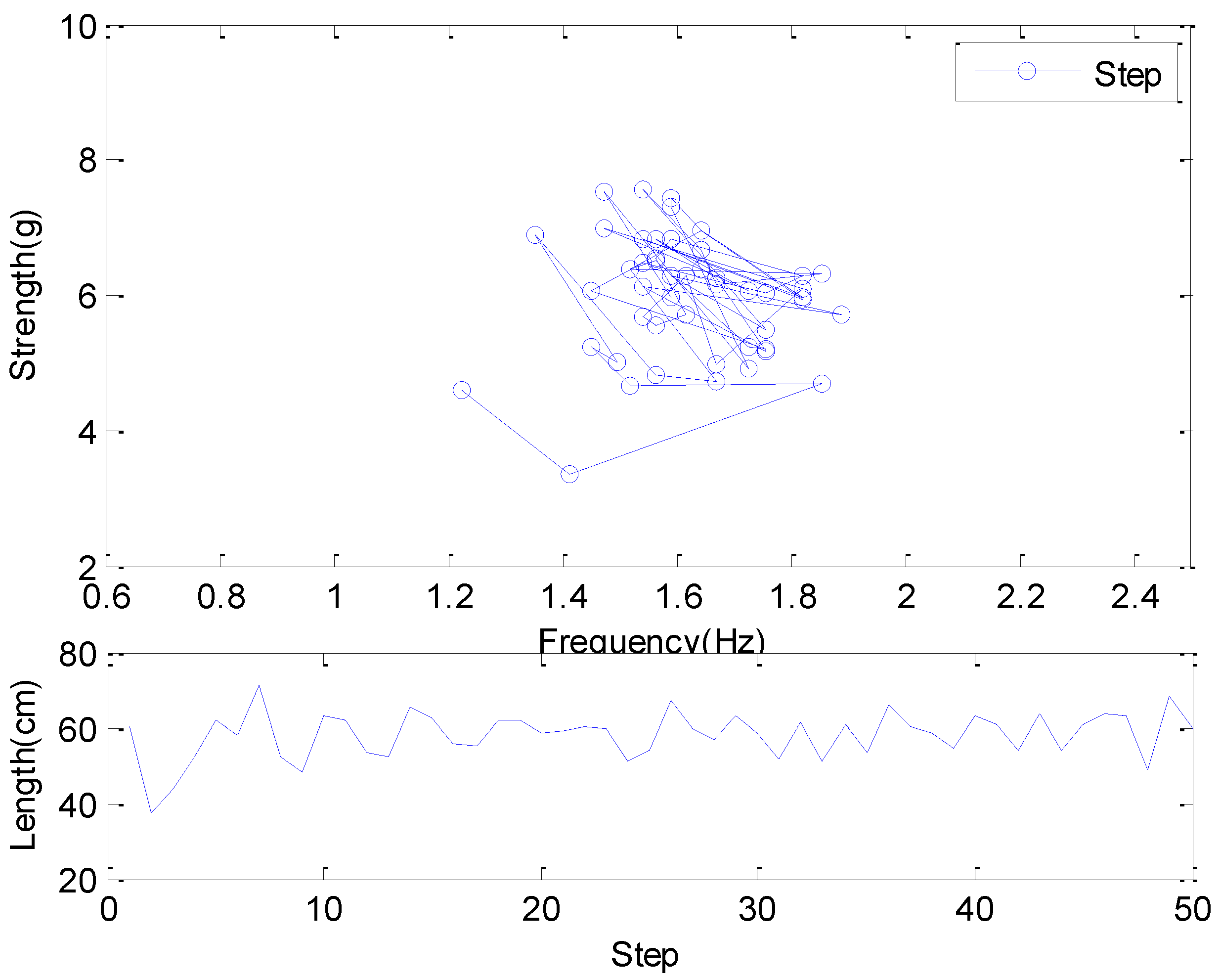
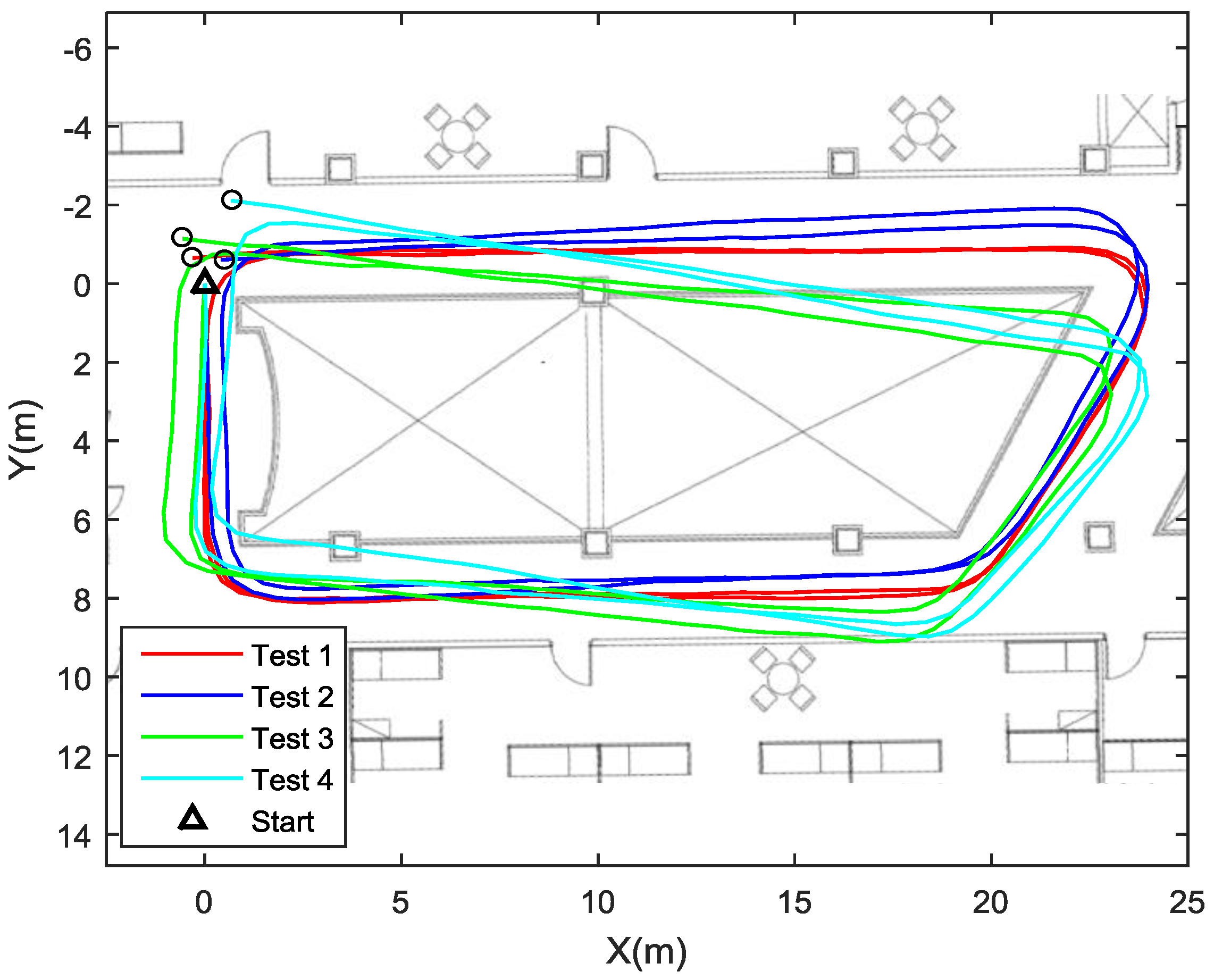
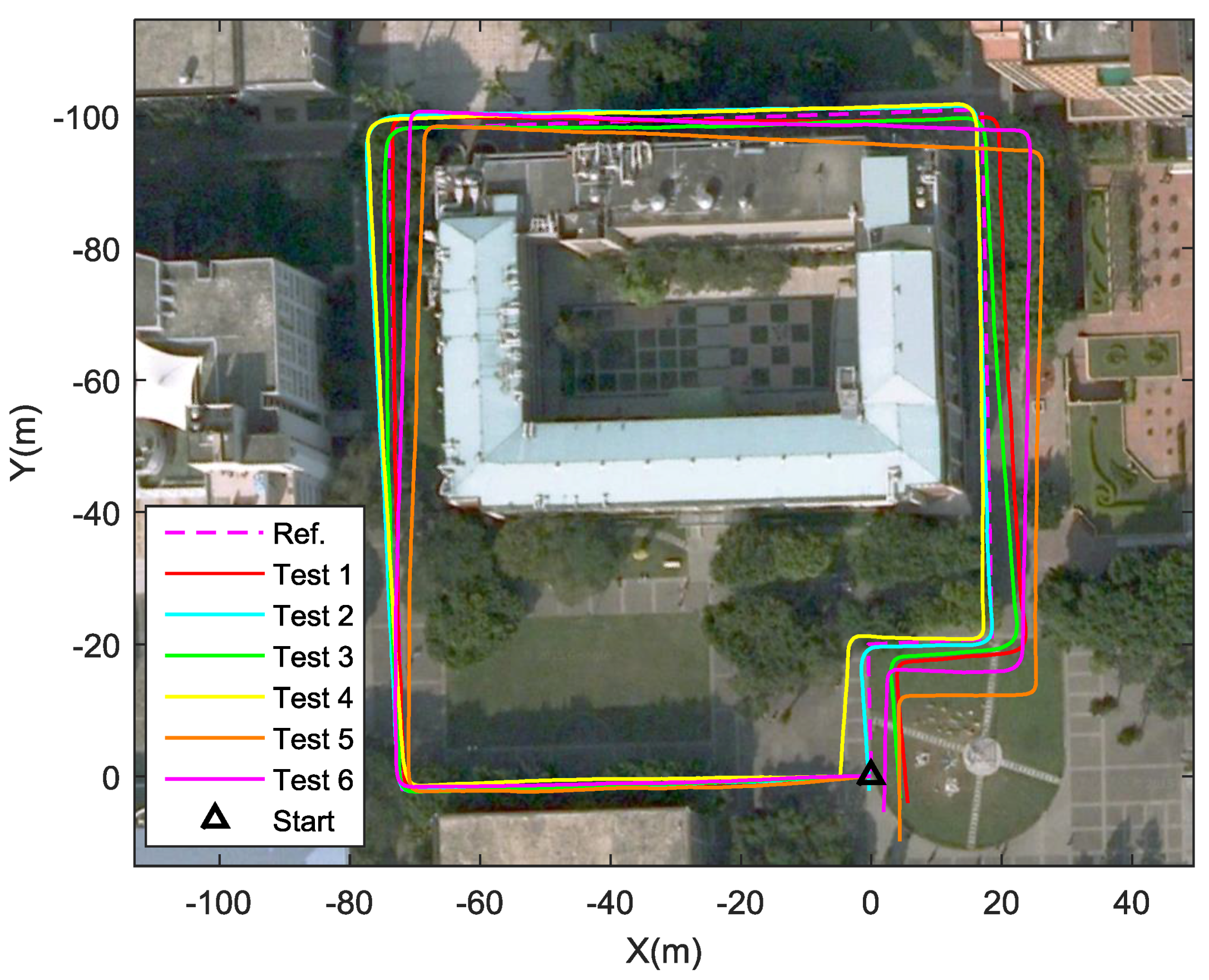
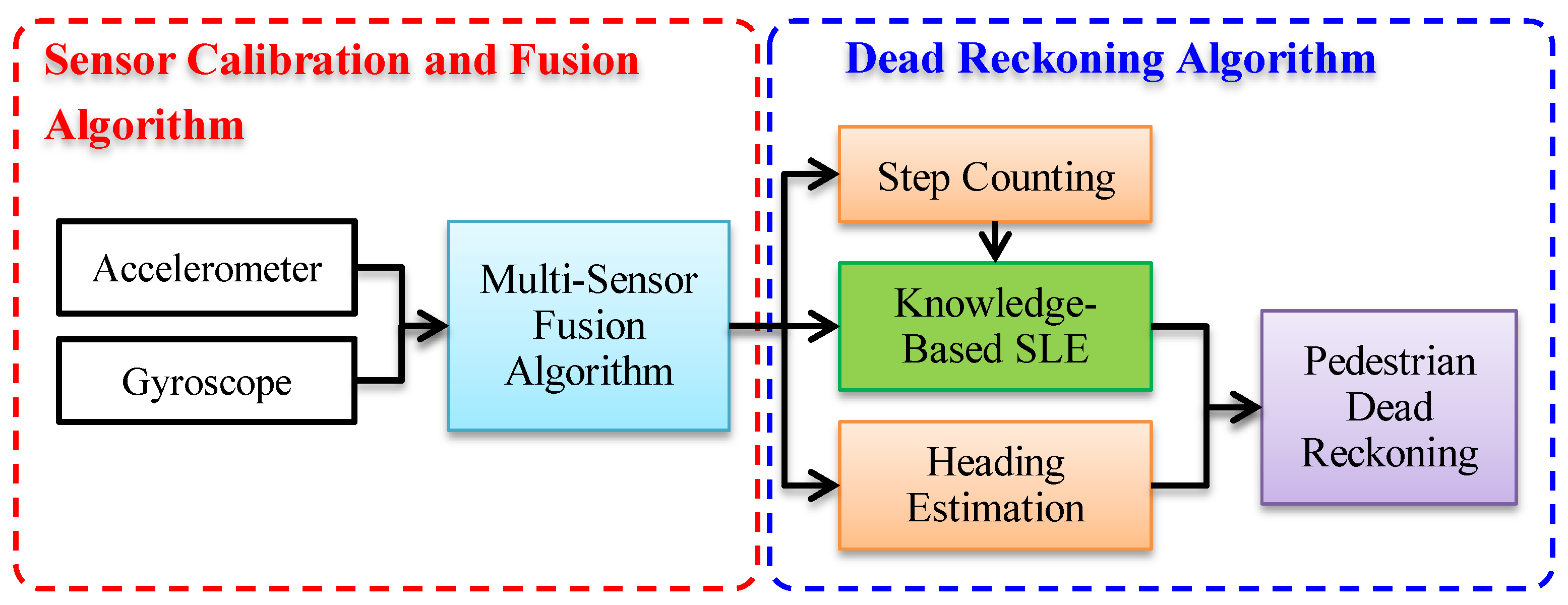
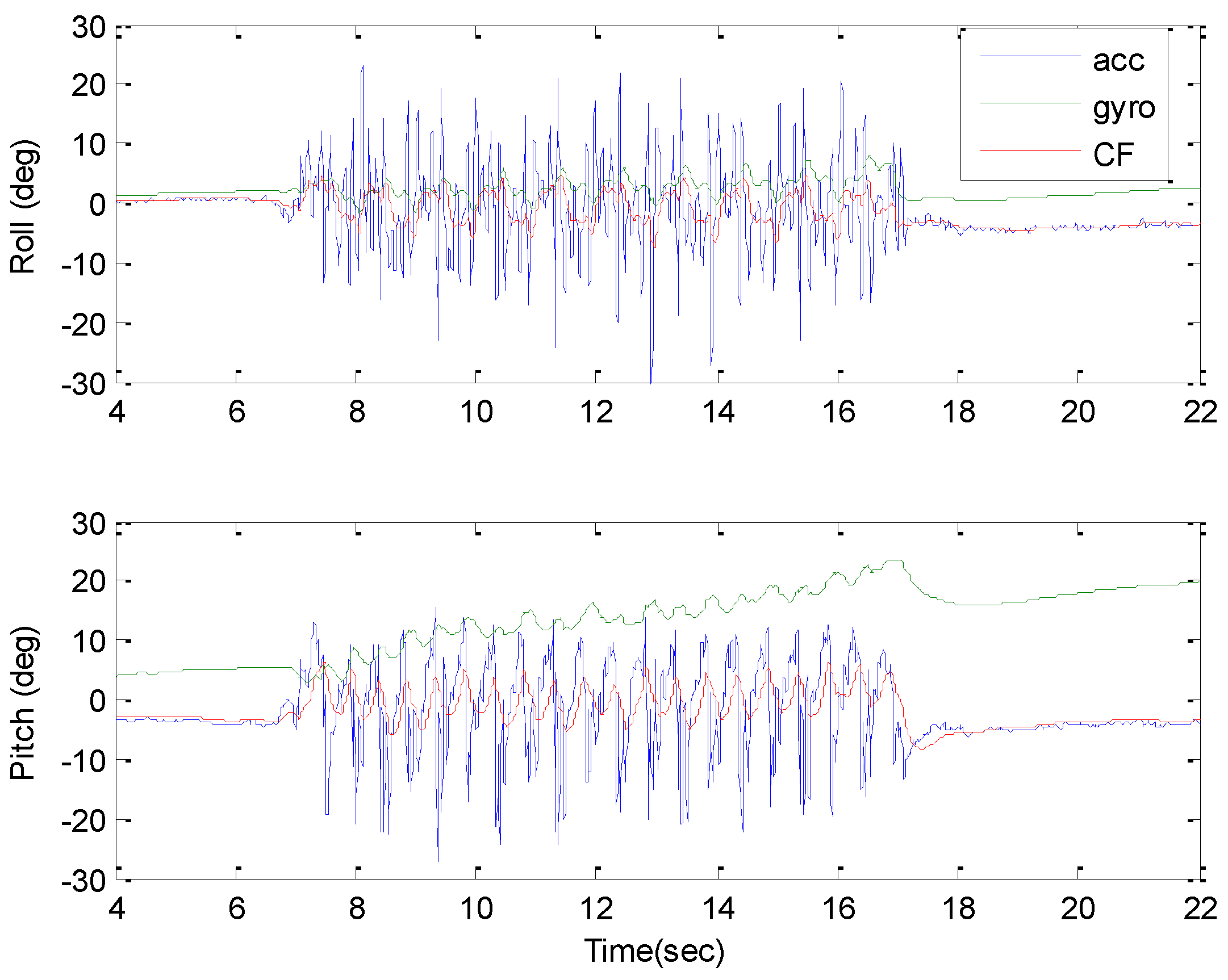
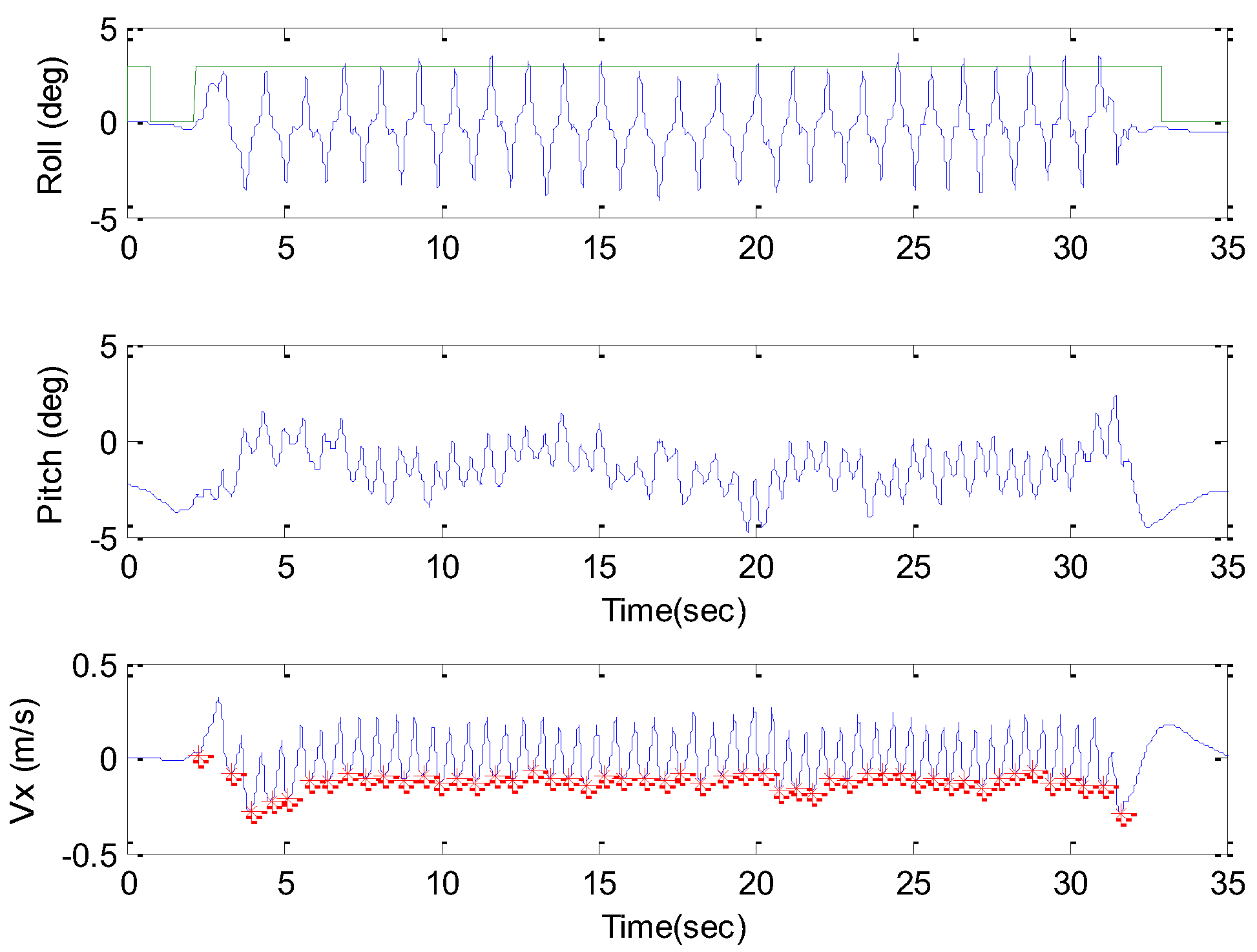
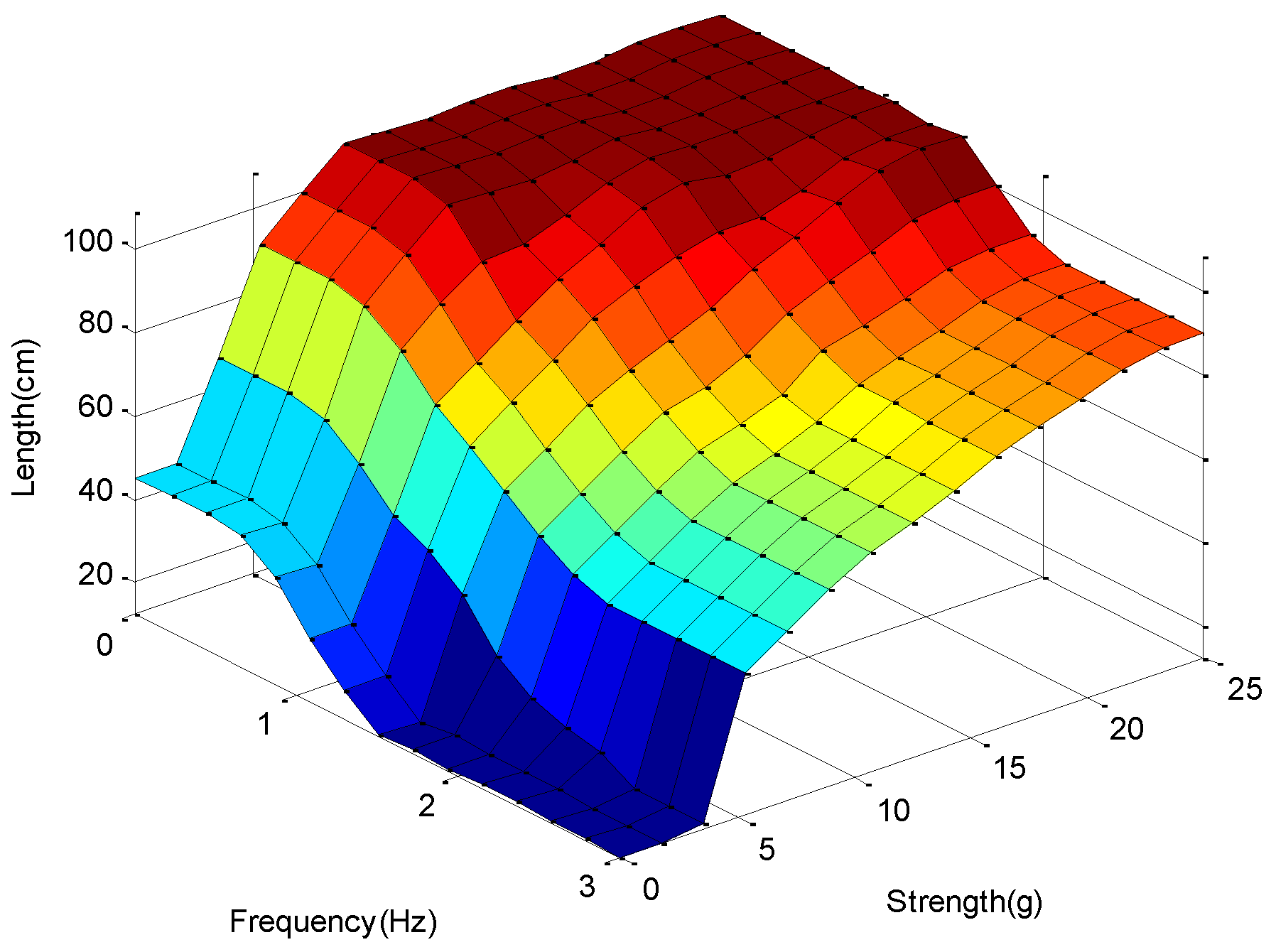
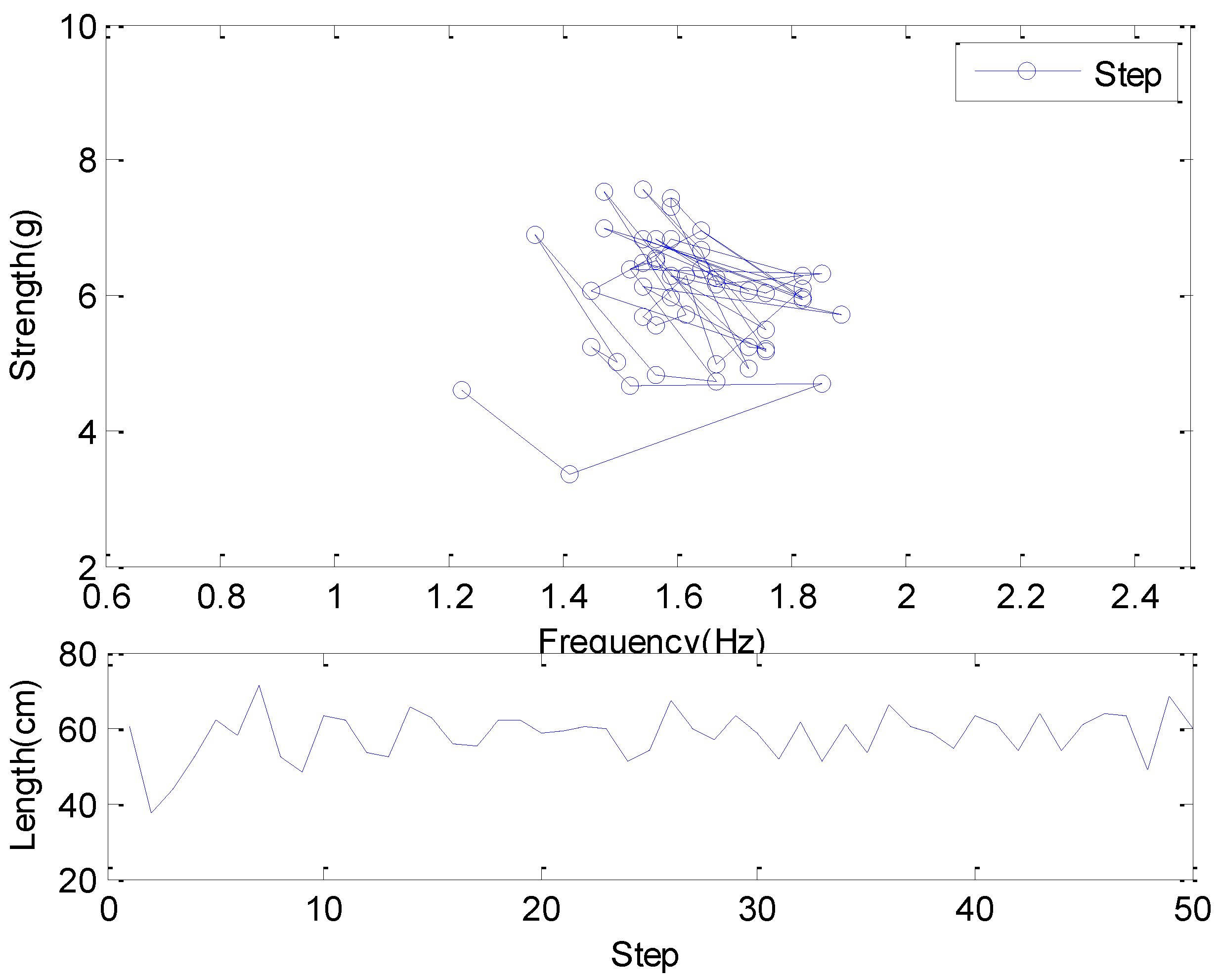
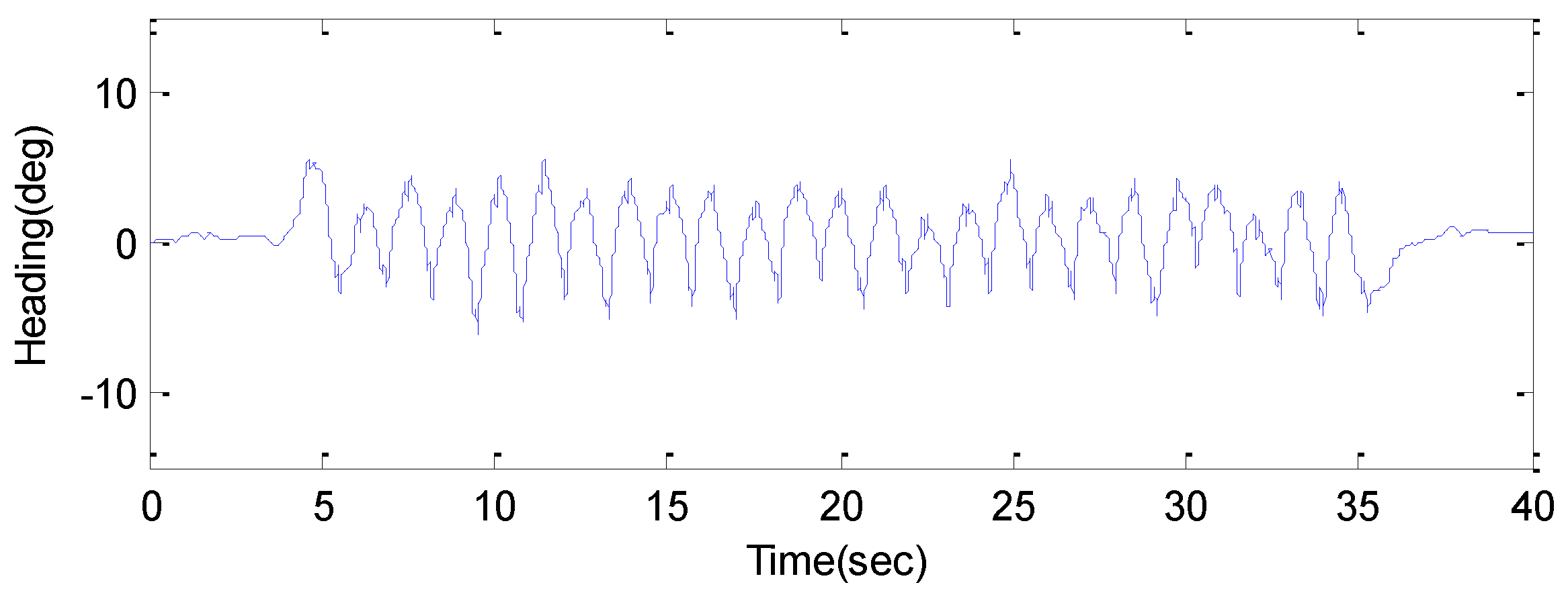
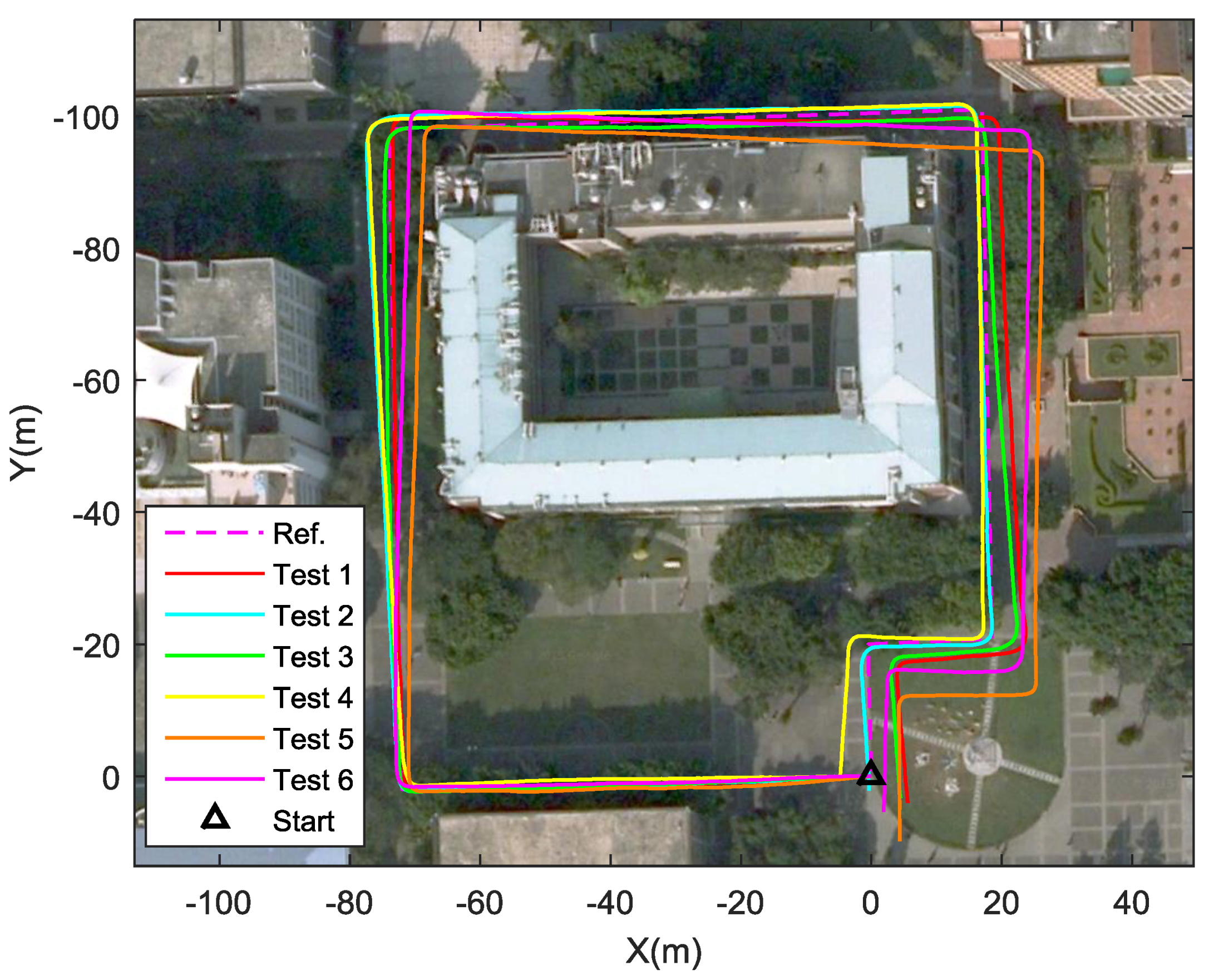
To enhance the reliability and stability of the PDR system, the adopted sensor module selected in this study was waist-mounted. In order to extract more information about pedestrian activities, a multi-sensor fusion algorithm was applied using a second-order complementary filter to derive the reliable orientation of the sensor module. To achieve accurate step counting and step time calculation, a step detection method was adopted that utilized velocity in the x-axis that was derived from acceleration along the x-axis. These results show the accuracy of the step counting method to be 99.5% for all tests. The wide-range SLE method for the PDR system was accomplished by using the FL method. The input variables of the adopted FL were step strength and frequency, and the output value was estimated step length. The FL design was based on the data acquired from the walking experiments of the target subject. The results of the proposed SLE for the target subject, who walked at different step lengths, showed distance errors that were within 1.2% of 116.51 m in the indoor environment, even for the non-target subject with the same height and body mass, and were within 1.78% of 385.2 m in the outdoor environment. The results of the experiment demonstrate that the proposed SLE had good navigation performance when the user was walking in an indoor environment. The SLE method and sensor calibration procedure could be applied to waist-mounted wearable devices with low-cost sensors to enhance the PDR and attitude estimation solutions. From the experiment’s results, the proposed SLE method and the PDR scheme demonstrate the ability to be implemented on waist-mounted wearable devices in real time and are suitable for the indoor and outdoor environments considered in this study without the help of map information or a pre-installed infrastructure.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}