
Potential of UAVs for Monitoring Mudflat Morphodynamics (Application to the Seine Estuary, France)

 ,
, 
Abstract
:1. Introduction
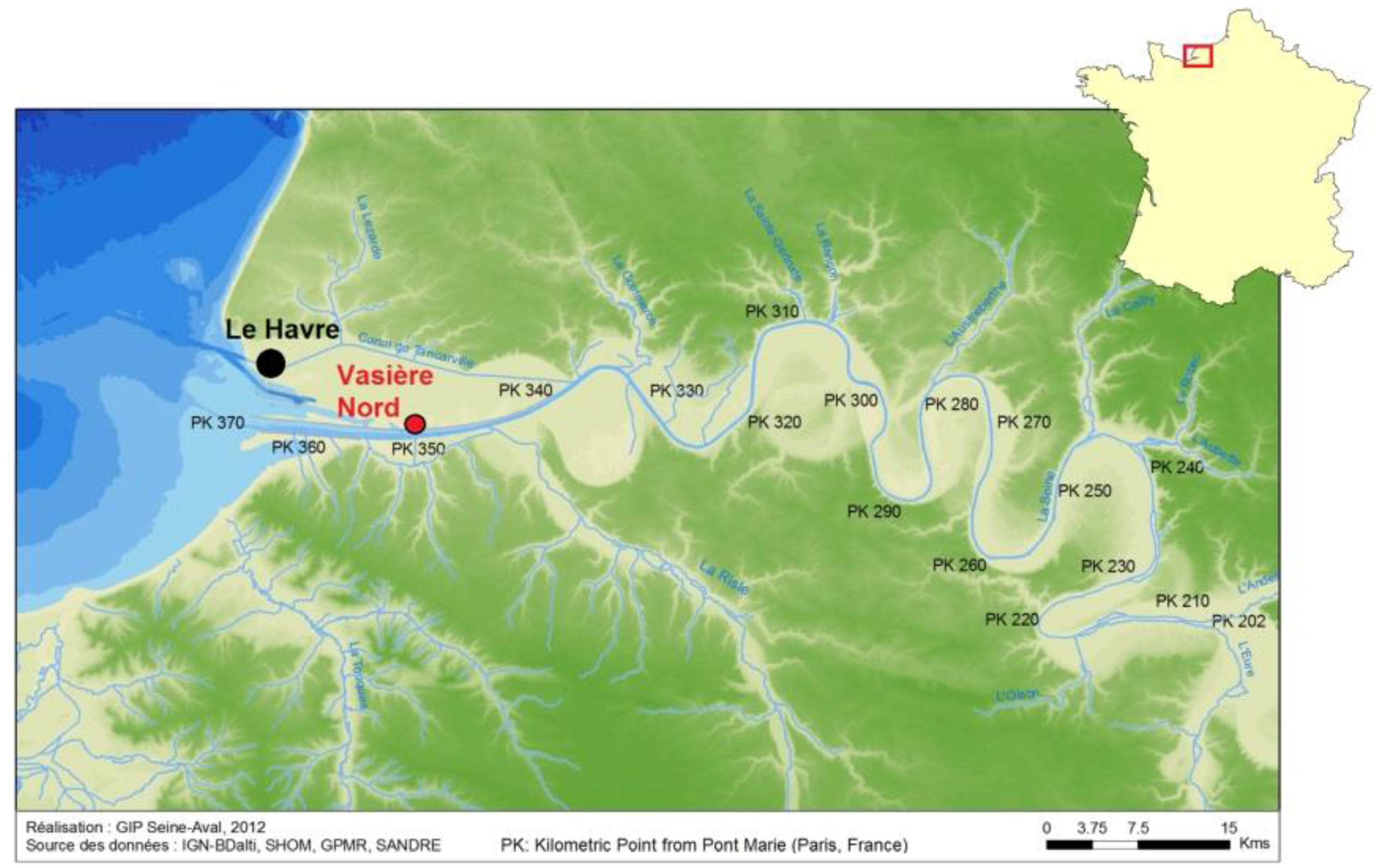
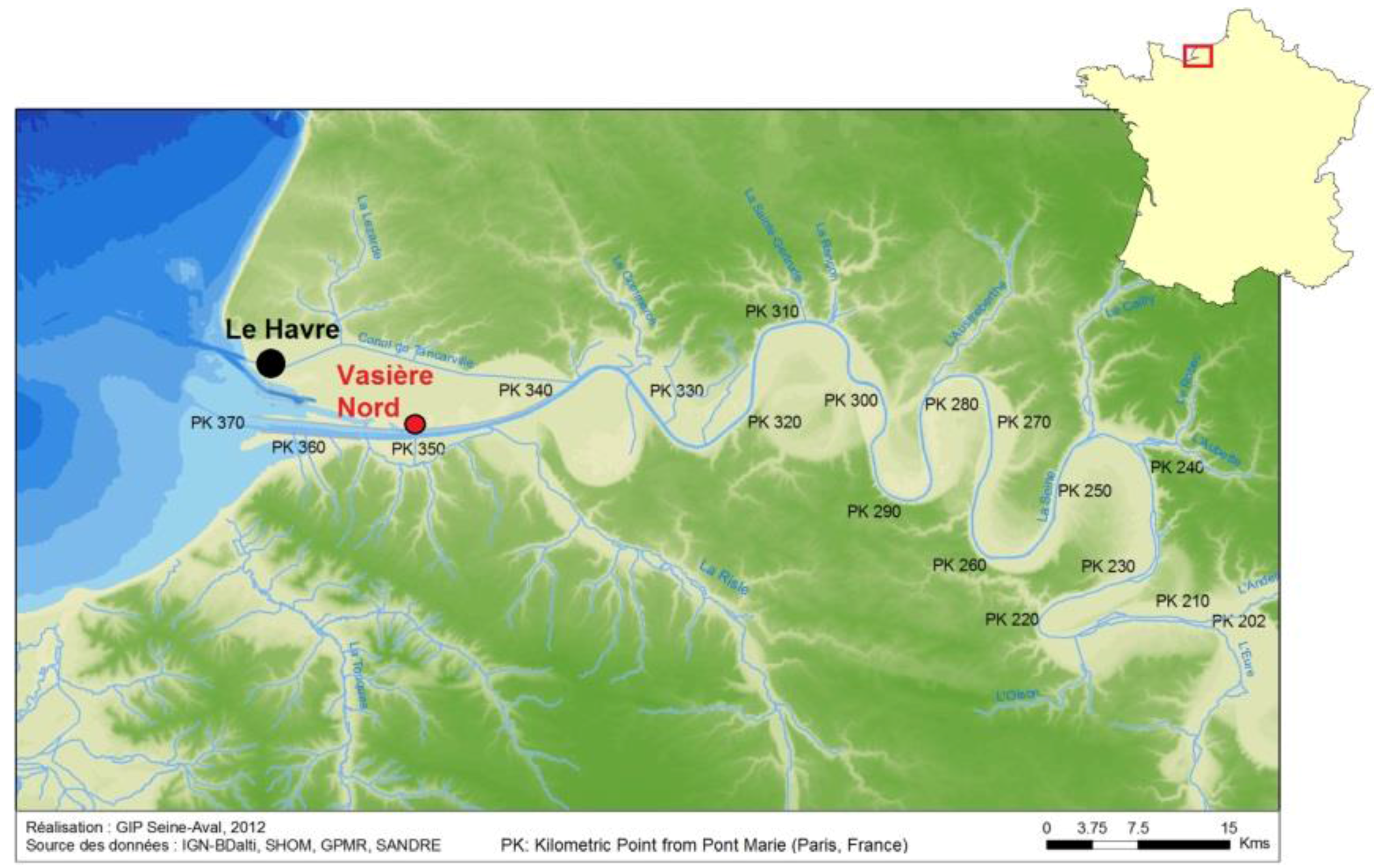
2. Study Area
3. Materials and Methods
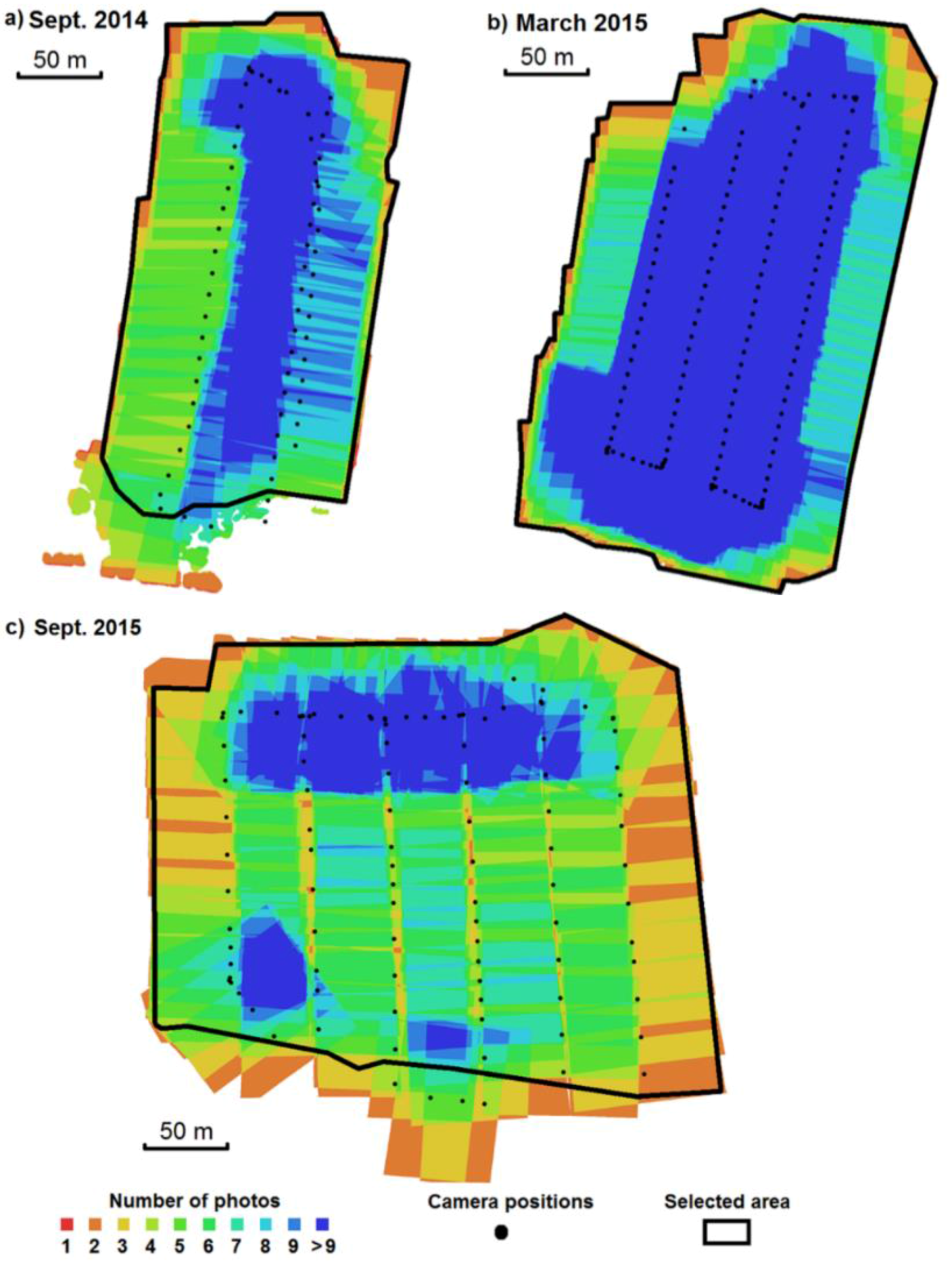
3.1. Data Processing Method
- i)
- Camera alignment by bundle adjustment. Common tie points are detected and matched on overlapping photographs so as to compute the external camera parameters (position and orientation) for each picture and refine the camera calibration parameters.
- ii)
- From the estimated camera positions and the pictures themselves, stereophotogrammetric equations allow the software to compute the position of each tie point, so as to build a dense point cloud.
- iii)
- A 3D polygonal mesh is then constructed as a representation of the object surface based on the dense point cloud.
- iv)
- The reconstructed mesh can be textured and used to generate an orthophotograph. The DEM is computed by interpolating the irregular polygonal mesh onto a regular grid.
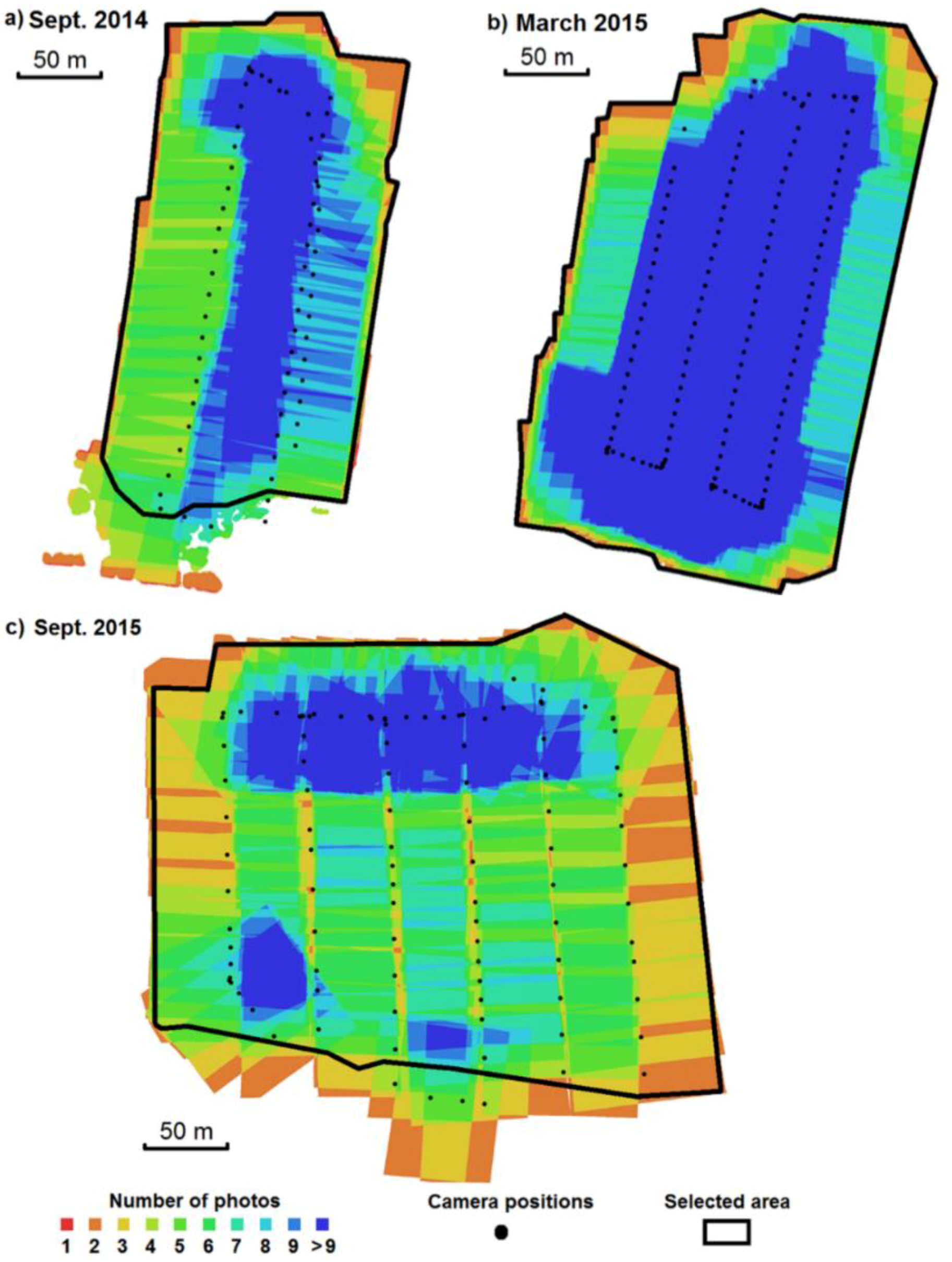
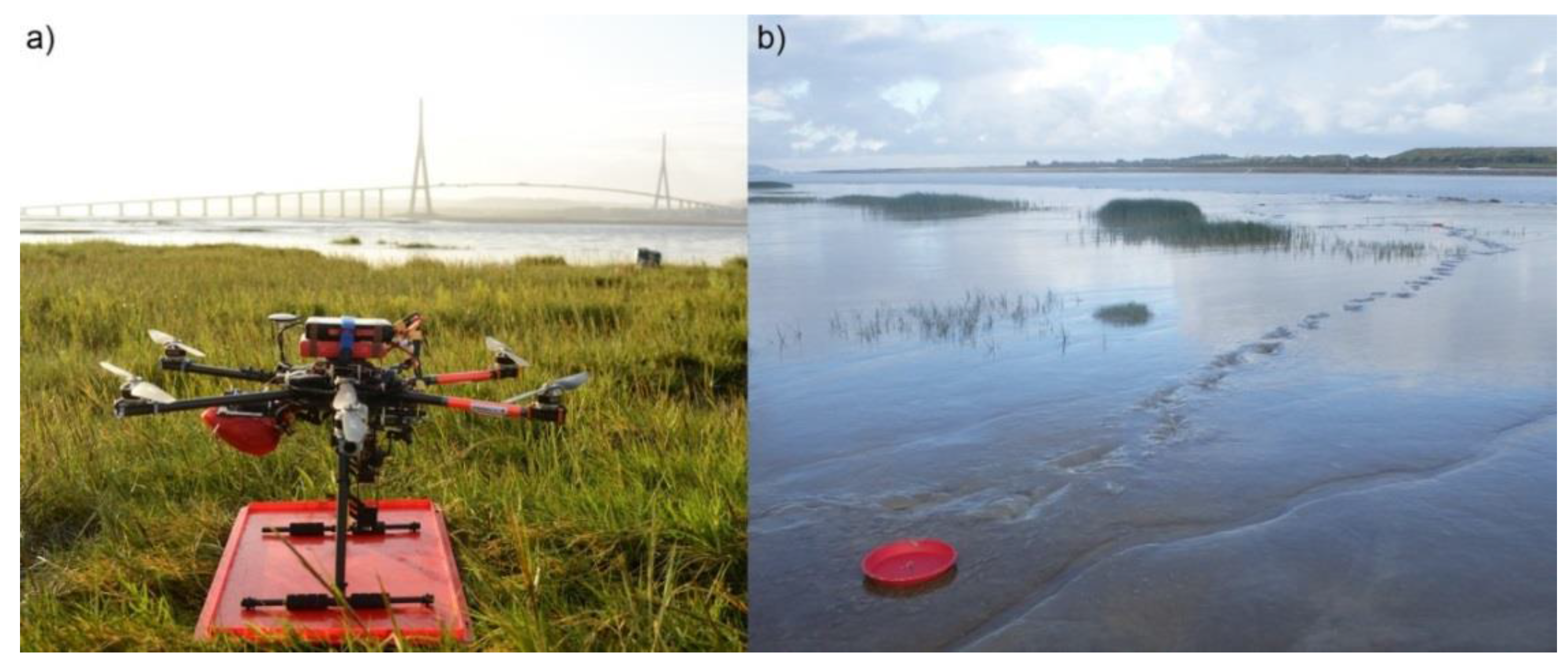
3.2. Technical Specifications of UAV Acquisition
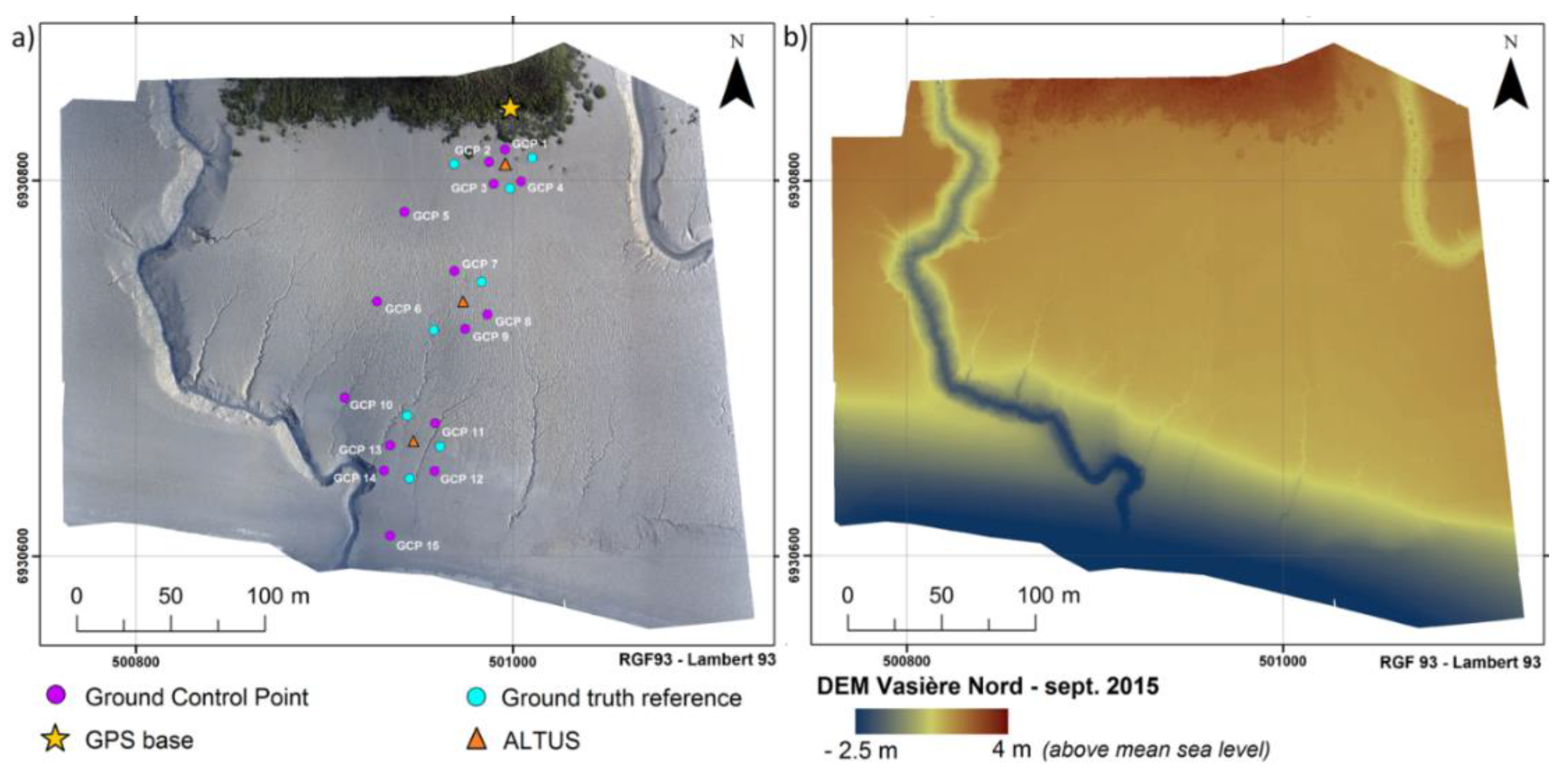
3.3. Field Survey Data Collection
4. Results
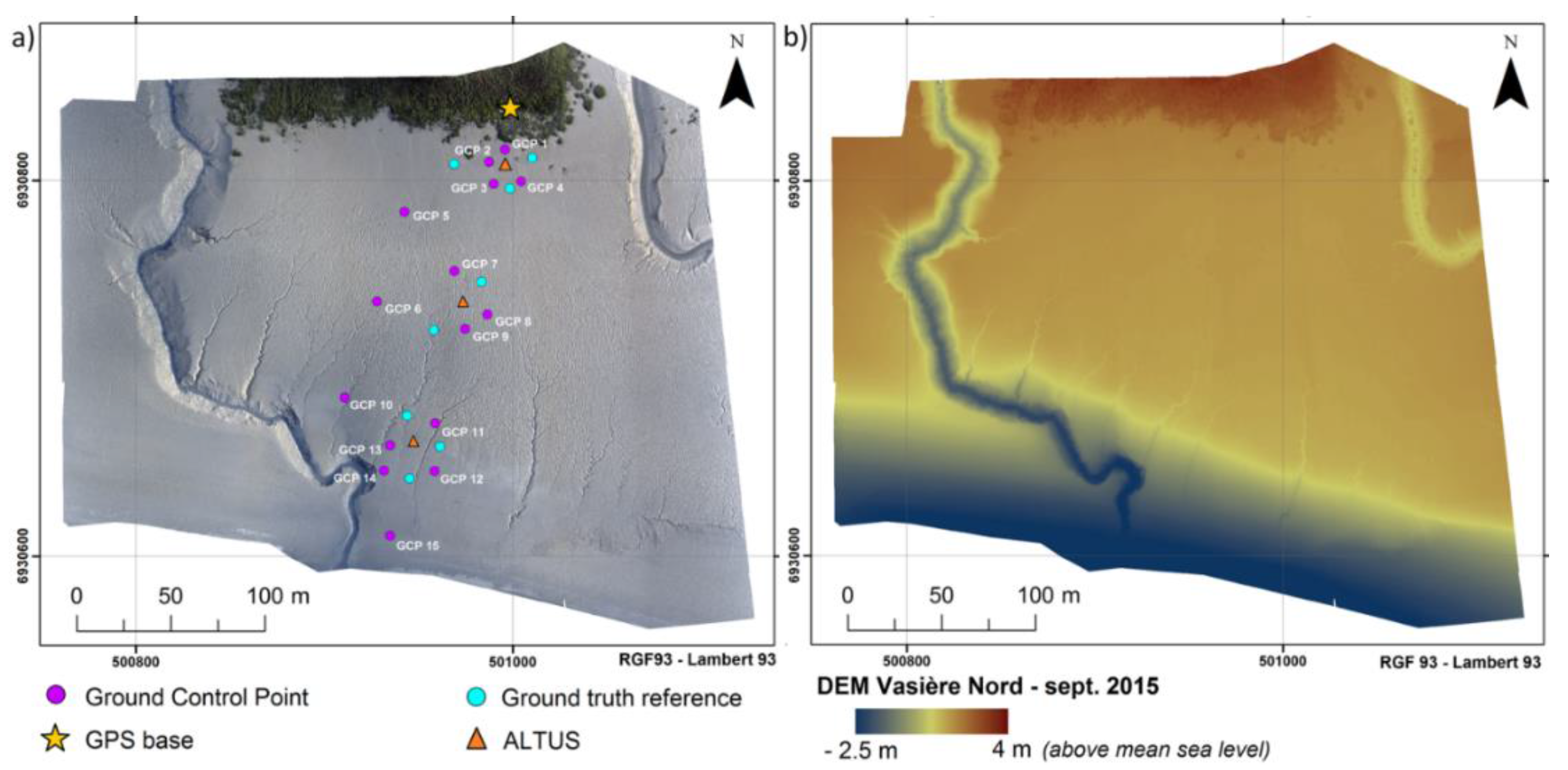
4.1. Orthophotograph and Digital Elevation Model
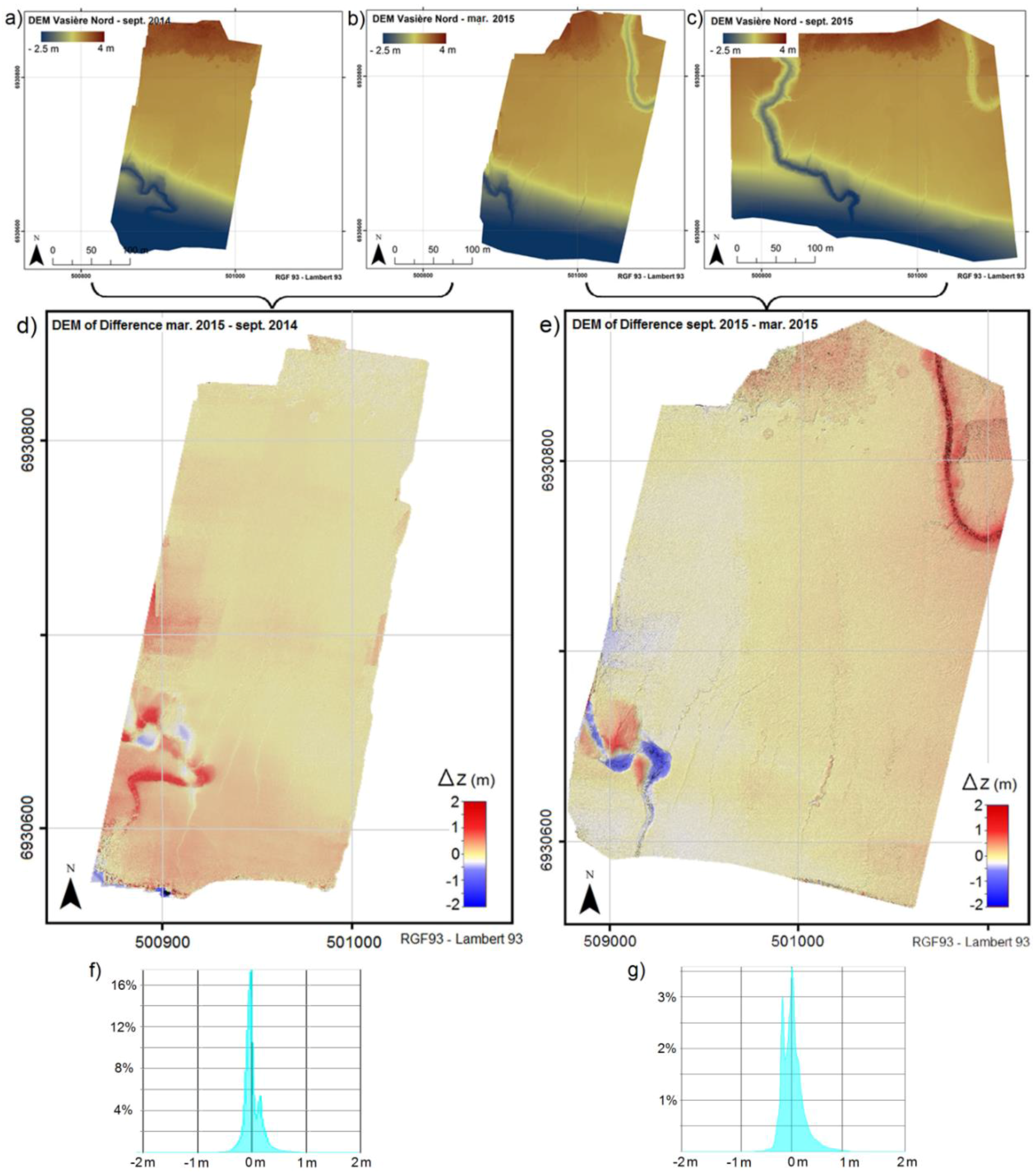
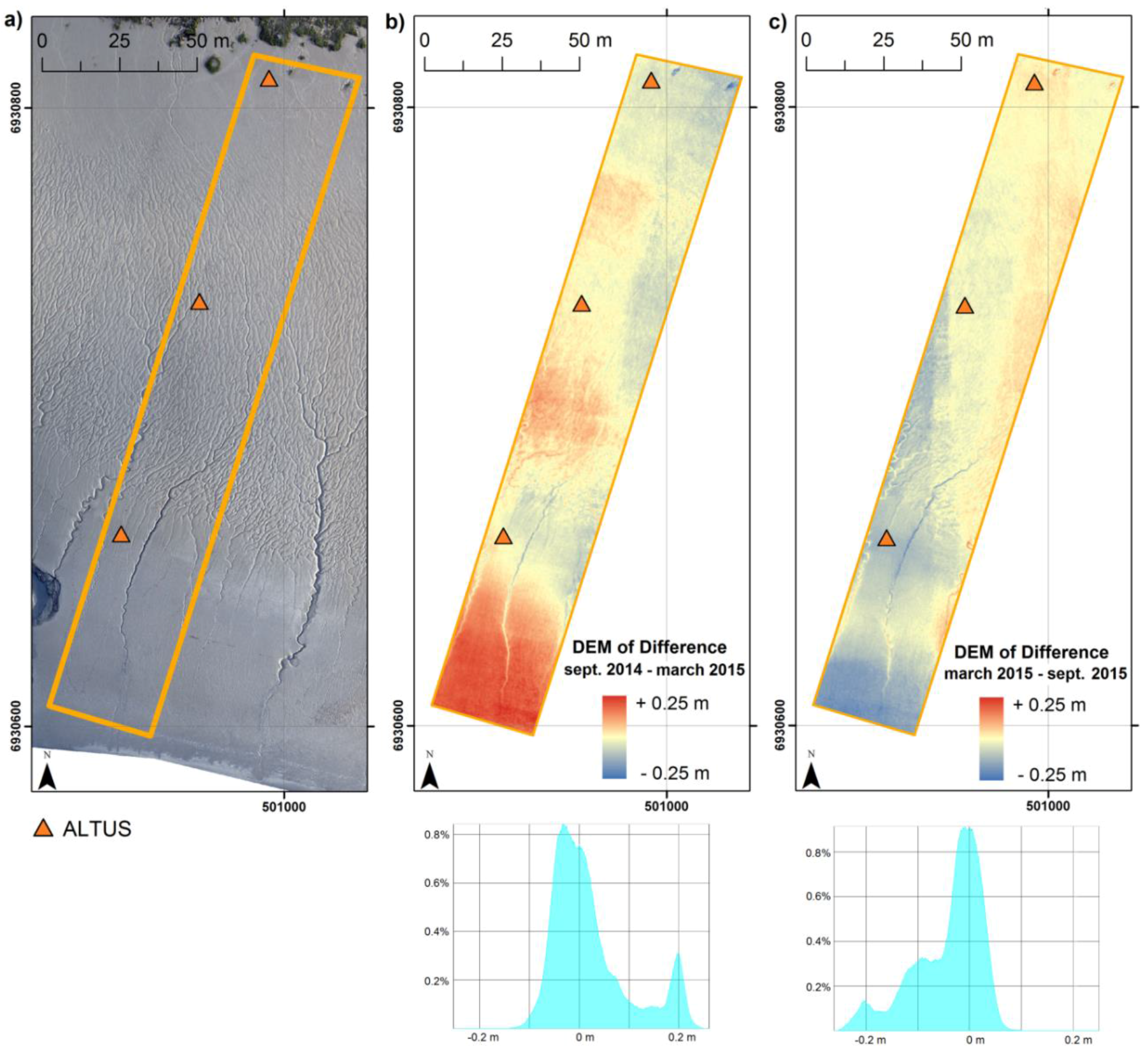
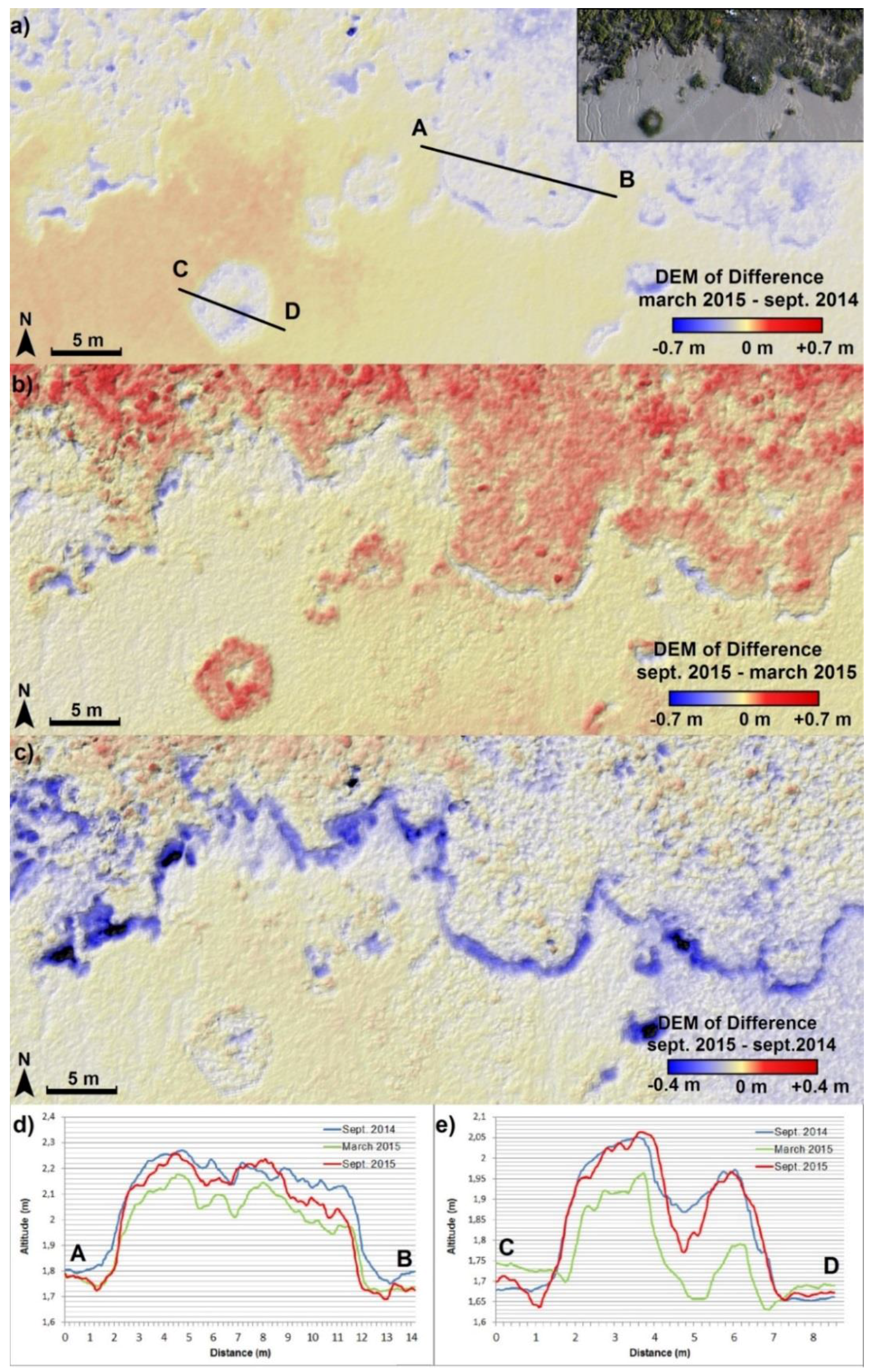
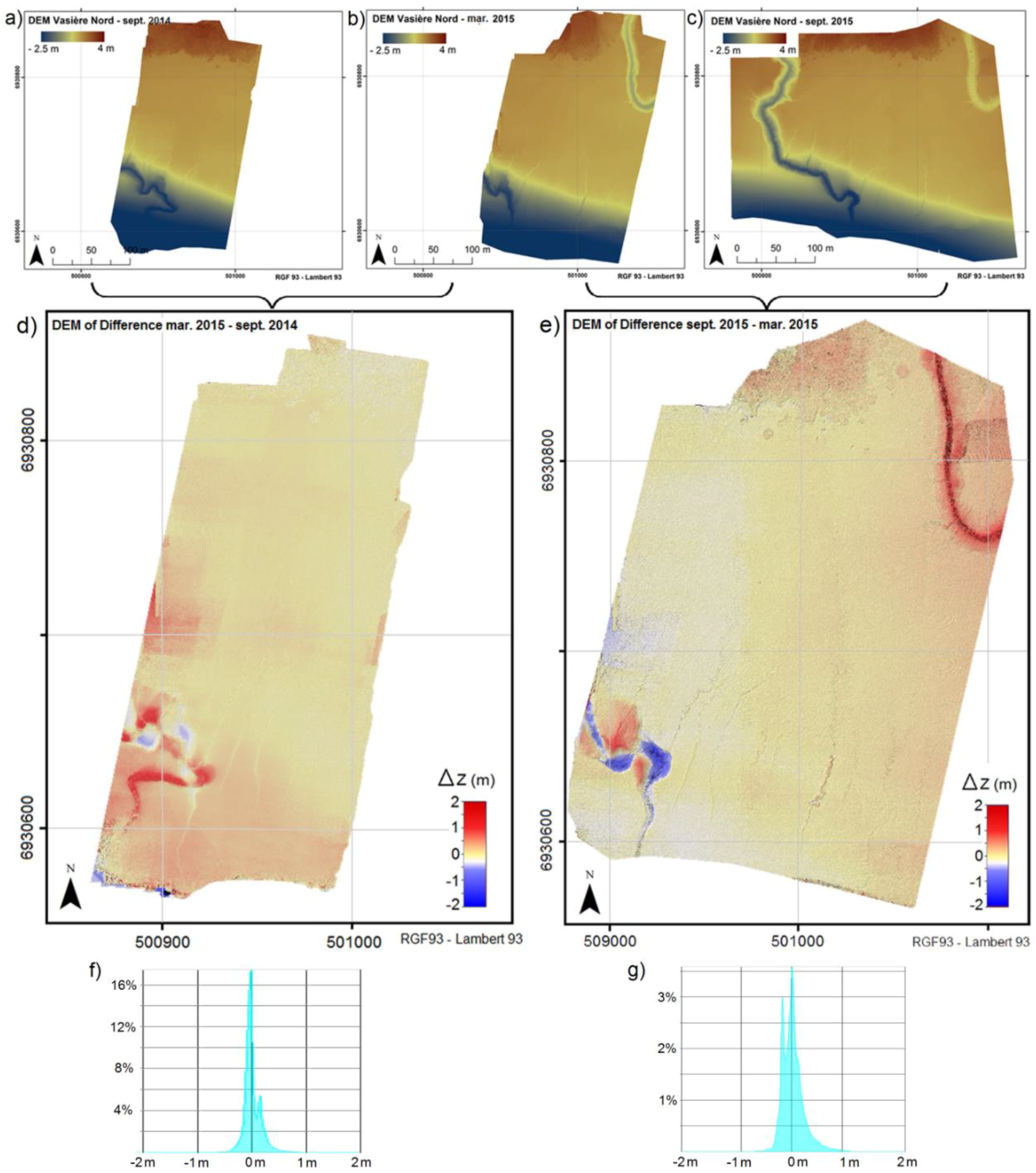
4.2. Surveying the General Trend of Evolution of the Area: DoDs and Volume Budgets
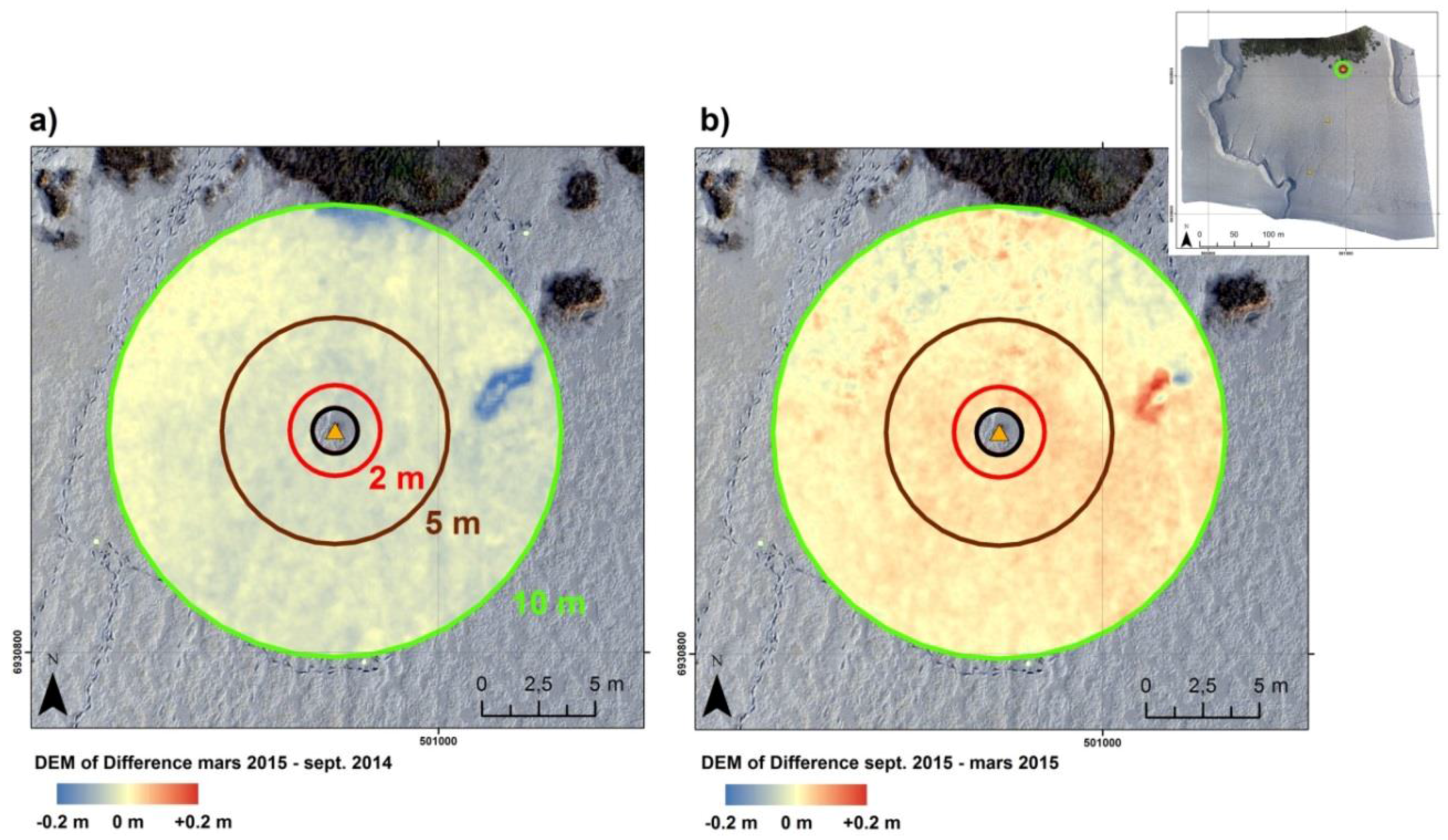
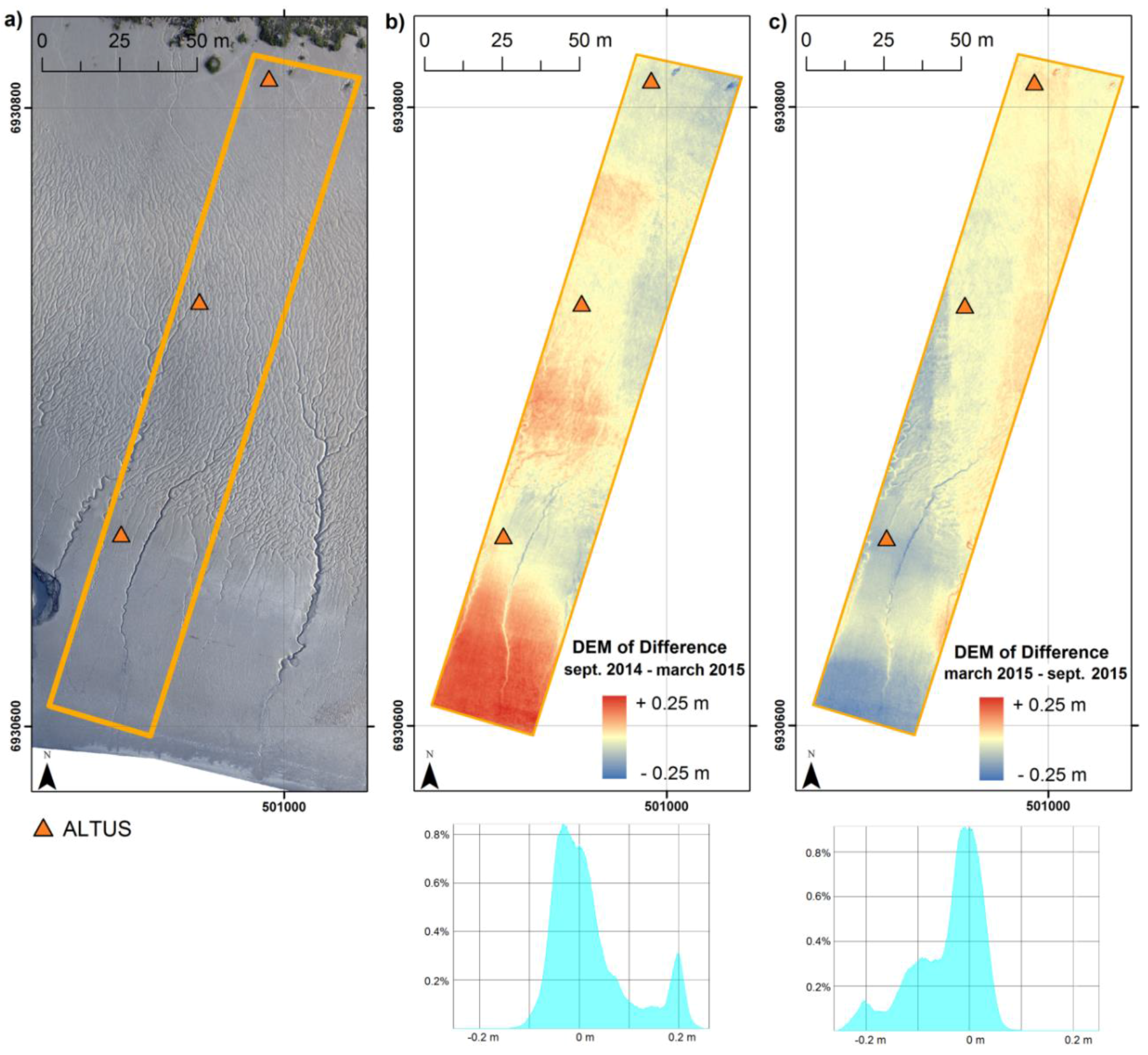
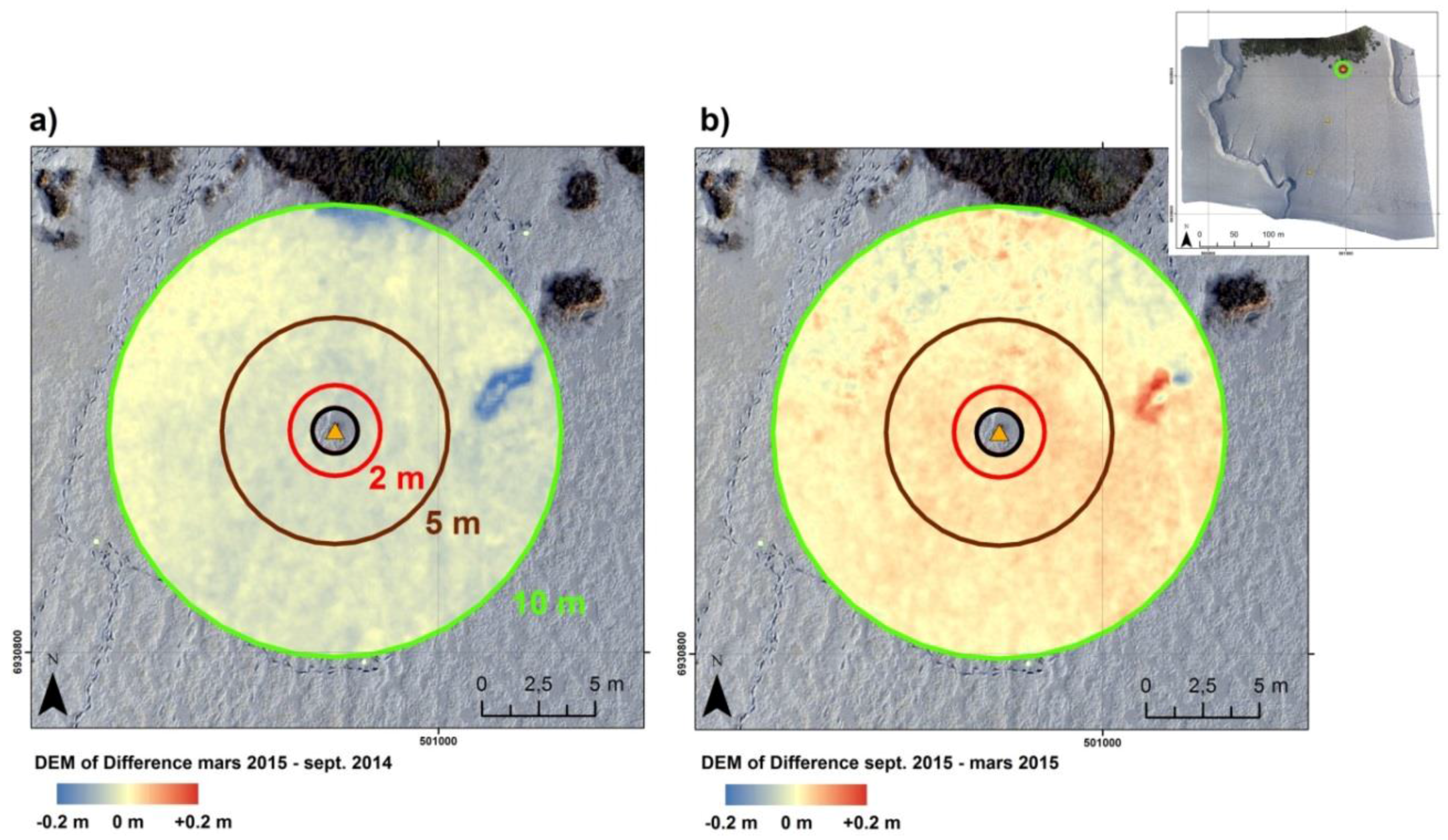
4.3. Spatially-Extended Versus Point-Wise Altimetry: Comparing with ALTUS Measurements
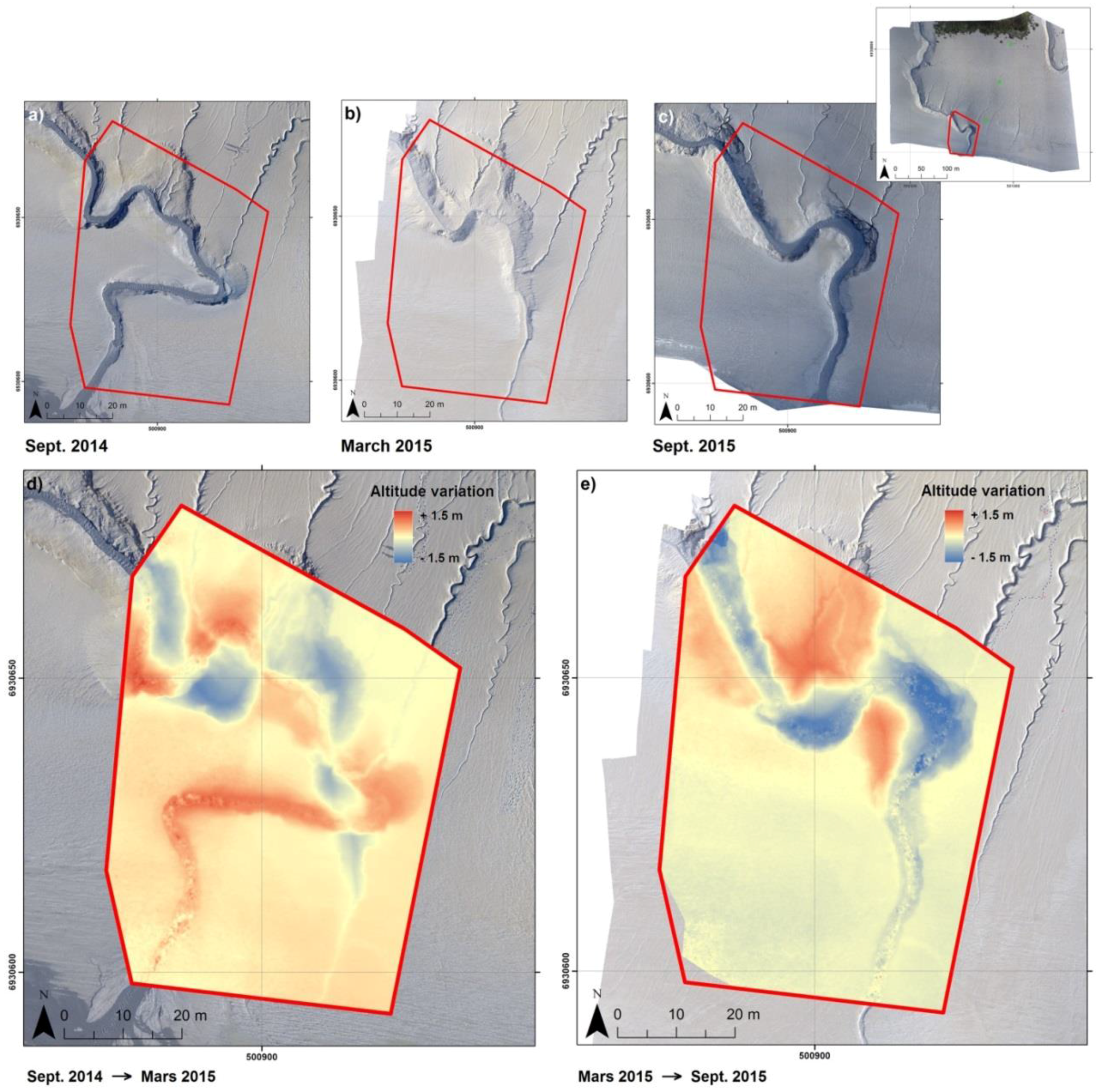
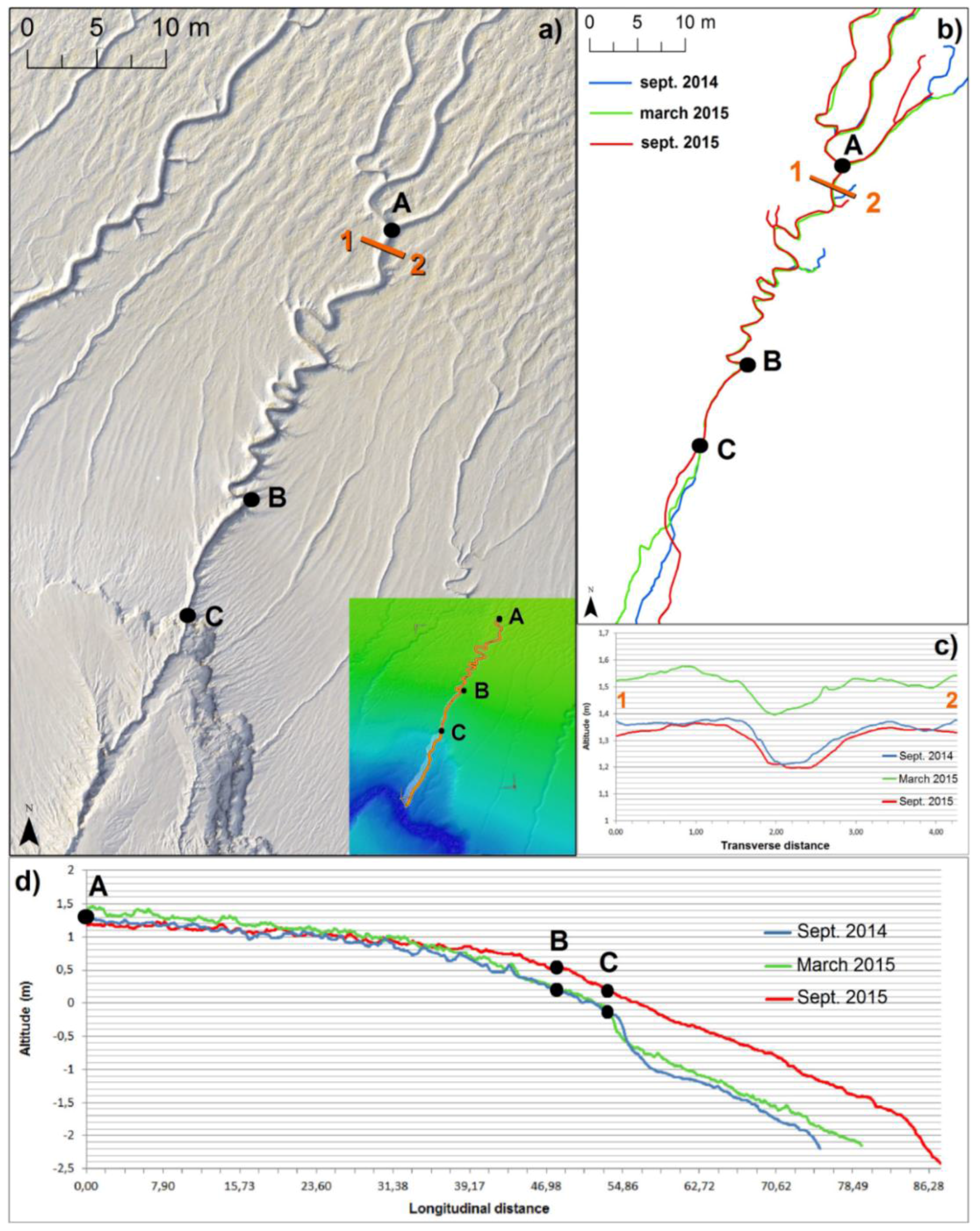
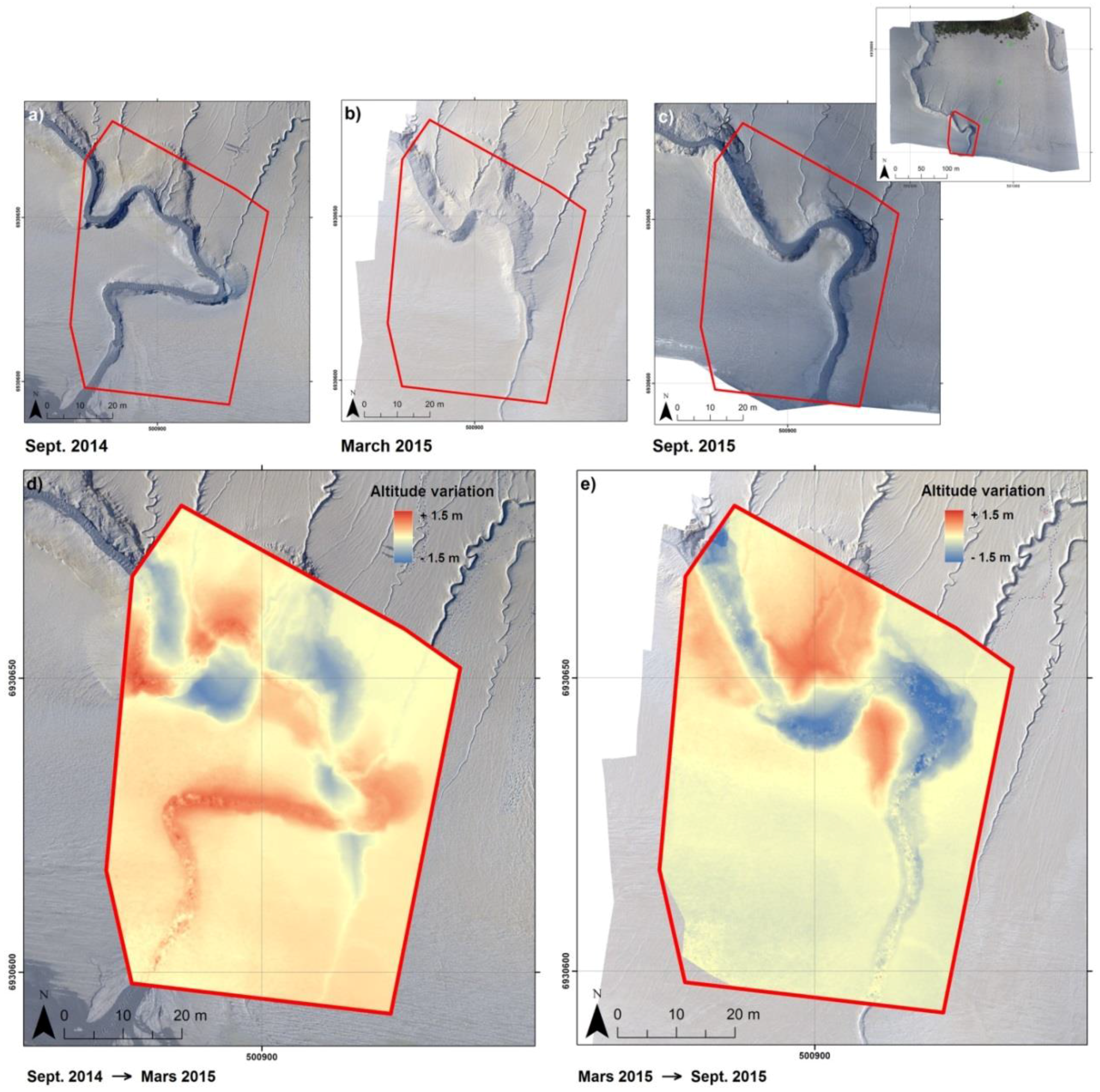
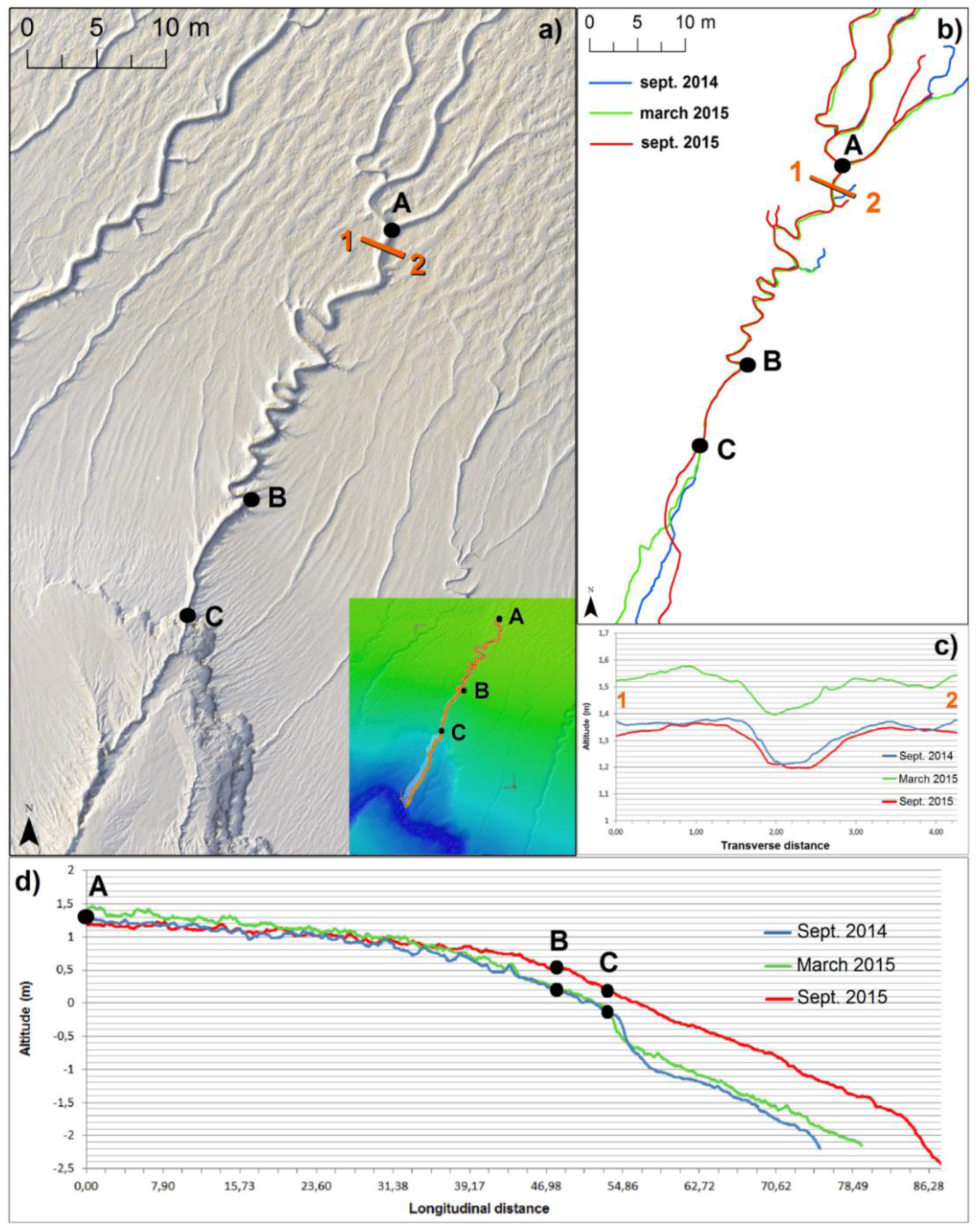
4.4. Surveying Tidal Creeks
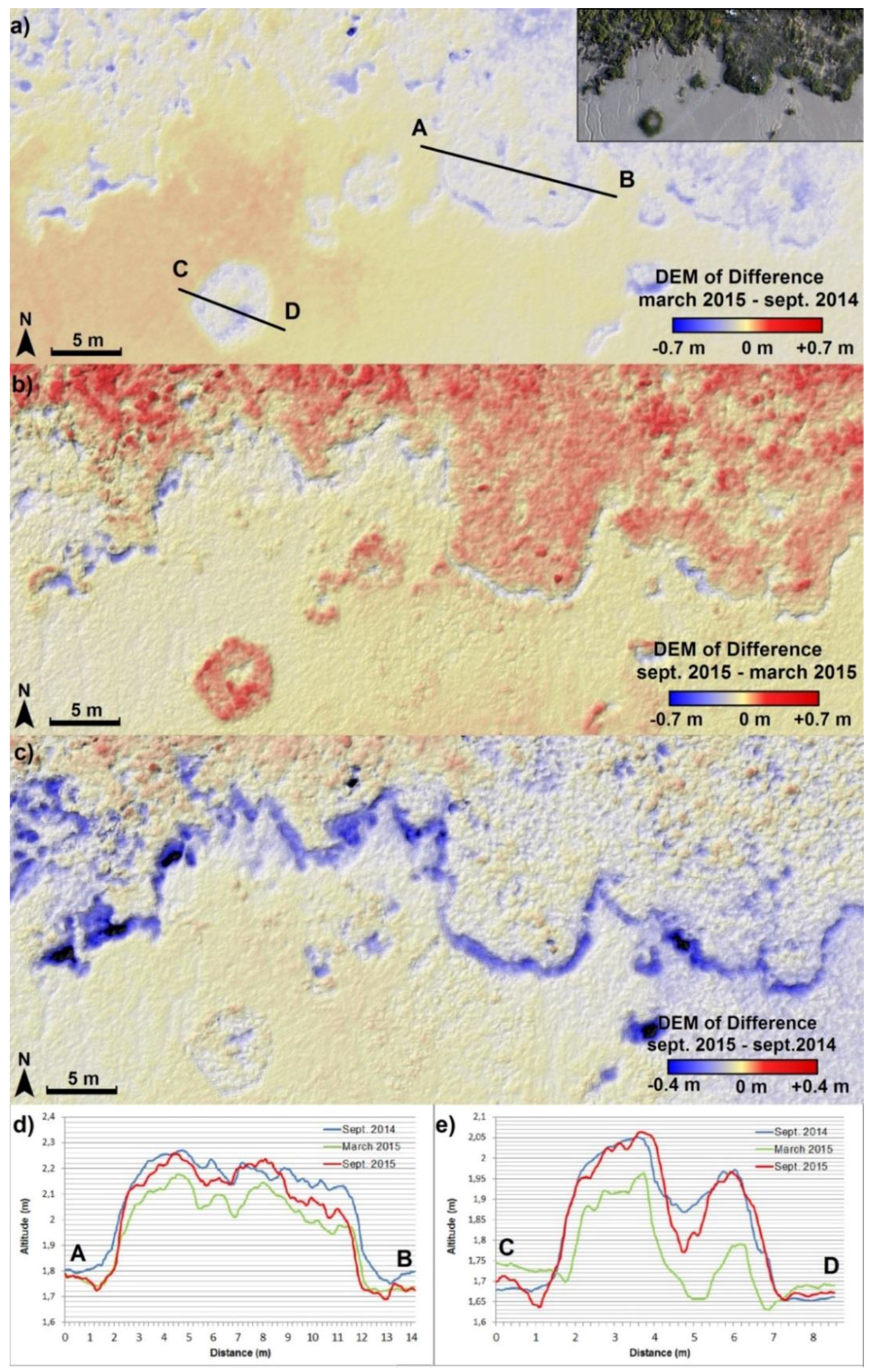
4.5. Surveying Plant Ground Cover
5. Discussion
5.1. Limits for Applications of SfM from UAVs in Mudflat Environments
5.2. Practical Guidelines for UAV Monitoring of Mudflats
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Deloffre, J.; Lafite, R.; Lesueur, P.; Lesourd, S.; Verney, R.; Guézennec, L. Sedimentary processes on an intertidal mudflat in the upper macrotidal Seine estuary, France. Estuar. Coast. Shelf Sci. 2005, 64, 710–720. [Google Scholar] [CrossRef]
- Deloffre, J.; Verney, R.; Lafite, R.; Lesueur, P.; Lesourd, S.; Cundy, A.B. Sedimentation on intertidal mudflats in the lower part of macrotidal estuaries: Sedimentation rhythms and their preservation. Mar. Geol. 2007, 241, 19–32. [Google Scholar] [CrossRef]
- Neumeier, U. Velocity and turbulence variations at the edge of saltmarshes. Cont. Shelf Res. 2007, 27, 1046–1059. [Google Scholar] [CrossRef]
- Neumeier, U.; Ciavola, P. Flow resistance and associated sedimentary processes in a spartina maritima salt-marsh. J. Coast. Res. 2004, 20, 435–447. [Google Scholar] [CrossRef]
- Ganthy, F.; Sottolichio, A.; Verney, R. Seasonal modification of tidal flat sediment dynamics by seagrass meadows of Zostera noltii (Bassin d’Arcachon, France). J. Mar. Syst. 2013, 109, S233–S240. [Google Scholar] [CrossRef]
- O’Brien, D.J.; Whitehouse, R.J.S.; Cramps, A. The cyclic development of a macrotidal mudflat on varying timescales. Cont. Shelf Res. 2014, 20, 1593–1619. [Google Scholar] [CrossRef]
- Avoine, J.; Allen, G.P.; Nichols, M.; Salomon, J.C.; Larsonneur, C. Suspended sediment transport in the Seine estuary, France—Effect of man-made modifications on estuary-shelf sedimentology. Mar. Geolol. 1981, 40, 119–137. [Google Scholar] [CrossRef]
- Lesourd, S.; Lesueur, P.; Brun-Cottan, J.-C.; Auffret, J.-P.; Poupinet, N.; Laignel, B. Morphosedimentary evolution of the macrotidal Seine estuary subjected to human impact. Estuaries 2001, 24, 940–949. [Google Scholar] [CrossRef]
- Bassoullet, P.; Le Hir, P.; Gouleau, D.; Robert, S. Sediment transport over an intertidal mudflat: Field investigations and estimation of fluxes within the “Baie de Marennes-Oleron” (France). Cont. Shelf Res. 2000, 20, 1635–1653. [Google Scholar] [CrossRef]
- Andersen, T.J.; Pejrup, M.; Nielsen, A.A. Long-term and high resolution measurements of bed level changes in a temperate, microtidal coastal lagoon. Mar. Geol. 2006, 226, 115–125. [Google Scholar] [CrossRef]
- Anthony, E.J.; Dolique, F.; Gardel, A.; Gratiot, N.; Proisy, C.; Polidori, L. Nearshore intertidal topography and topographic-forcing mechanisms of an Amazon-derived mud bank in French Guiana. Cont. Shelf Res. 2008, 28, 813–822. [Google Scholar] [CrossRef]
- Brasington, J.; Vericat, D.; Rychkov, I. Modeling river bed morphology, roughness, and surface sedimentology using high resolution terrestrial laser scanning. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Pajares, G. Overview and Current Status of Remote Sensing Applications Based on Unmanned Aerial Vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–329. [Google Scholar] [CrossRef]
- Stumpf, A.; Malet, J.-P.; Kerle, N.; Niethammer, U.; Rothmund, S. Image-Based Mapping of Surface Fissures for the Investigation of Landslide Dynamics. Geomorphology 2013, 186, 12–27. [Google Scholar] [CrossRef]
- Honkavaara, E.; Saari, H.; Kaivosoja, J.; Pölönen, I.; Hakala, T.; Litkey, P.; Mäkynen, J.; Pesonen, L. Processing and Assessment of Spectrometric, Stereoscopic Imagery Collected Using a Lightweight UAV Spectral Camera for Precision Agriculture. Remote Sens. 2013, 5, 5006–5039. [Google Scholar] [CrossRef]
- Delacourt, C.; Allemand, P.; Jaud, M.; Grandjean, P.; Deschamps, A.; Ammann, J.; Cuq, V.; Suanez, S. DRELIO: An Unmanned Helicopter for Imaging Coastal Areas. J. Coast. Res. 2009, 56, 1489–1493. [Google Scholar]
- Lejot, J.; Piegay, H.; Hunter, P.D.; Moulin, B.; Gagnage, M. Utilisation de la télédétection pour la caractérisation des corridors fluviaux: Exemples d’applications et enjeux actuels. Géomorphol. Relief Process. Environ. 2011, 2, 157–172. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for High-Resolution Reconstruction of Topography: The Structure from Motion Approach on Coastal Environments. Remote Sensing 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Woodget, A.S.; Carbonneau, P.E.; Visser, F.; Maddock, I.P. Quantifying submerged fluvial topography using hyperspatial resolution UAS imagery and structure from motion photogrammetry. Earth Surf. Process. Landf. 2015, 40, 47–64. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. 2012, 117. [Google Scholar] [CrossRef]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the 7th IEEE International Conference on Computer Vision (ICCV), Kerkyra, Corfu, Greece, 20–25 September 1999; pp. 1150–1157.
- Wan, H.; Wang, Q.; Jiang, D.; Fu, J.; Yang, Y.; Liu, X. Monitoring the Invasion of Spartina alterniflora Using Very High Resolution Unmanned Aerial Vehicle Imagery in Beihai, Guangxi (China). Sci. World J. 2014, 2014, 1–7. [Google Scholar]
- Kelcey, J.; Lucieer, A. Sensor Correction of a 6-Band Multispectral Imaging Sensor for UAV Remote Sensing. Remote Sens. 2012, 4, 1462–1493. [Google Scholar] [CrossRef]
- Cuvilliez, A.; Lafite, R.; Deloffre, J.; Lemoine, M.; Langlois, E.; Sakho, I. River flow control on intertidal mudflat sedimentation in the mouth of a macrotidal estuary. Geomorphology 2015, 239, 174–181. [Google Scholar] [CrossRef]
- Van Prooijen, B.C.; Zhu, Q.; Brouwer, R.L.; He, Q. Horizontal coherent structures between tidal flat and channel. In Proceedings of the Coastal Sediments 2015, San Diego, CA, USA, 11–15 May 2015.
- Ramirez-Juidias, E. Study of Erosion Processes in the Tinto Salt-Marshes with Remote Sensing Images. Adv. Image Video Process. 2014, 2, 39–52. [Google Scholar] [CrossRef]
- Verney, R.; Deloffre, J.; Brun-Cottan, J.-C.; Lafite, R. The effect of wave-induced turbulence on intertidal mudflats: Impact of boat traffic and wind. Cont. Shelf Res. 2007, 27, 594–612. [Google Scholar] [CrossRef]
- Javernick, L.; Brasington, J.; Caruso, B. Modeling the topography of shallow braided rivers using Structure-from-Motion photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- Maune, D.F. Digital Elevation Model Technologies and Applications: The DEM Users Manual, 2nd ed.; American Society for Photogrammetry and Remote Sensing: Bethesda, MD, USA, 2007. [Google Scholar]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Brasington, J.; Langham, J.; Rumsby, B. Methodological sensitivity of morphometric estimates of coarse fluvial sediment transport. Geomorphology 2003, 53, 299–316. [Google Scholar] [CrossRef]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth Surf. Process. Landf. 2009, 35, 136–156. [Google Scholar] [CrossRef]
- Fuller, I.C.; Large, A.R.G.; Charlton, M.E.; Heritage, G.L.; Milan, D.J. Reach-scale sediment transfers: An evaluation of two morphological budgeting approaches. Earth Surf. Process. Landf. 2003, 28, 889–903. [Google Scholar] [CrossRef]
- Milan, D.J.; Heritage, G.L.; Large, A.R.G.; Fuller, I.C. Filtering spatial error from DEMs: Implications for morphological change estimation. Geomorphology 2011, 125, 160–171. [Google Scholar] [CrossRef]
- Heritage, G.L.; Milan, D.J.; Large, A.R.G.; Fuller, I.C. Influence of survey strategy and interpolation model on DEM quality. Geomorphology 2009, 112, 334–344. [Google Scholar] [CrossRef]
- James, L.A.; Hodgson, M.E.; Ghoshal, S.; Latiolais, M.M. Geomorphic change detection using historic maps and DEM differencing: The temporal dimension of geospatial analysis. Geomorphology 2012, 137, 181–198. [Google Scholar] [CrossRef]
- Blumenthal, D.; Booth, D.T.; Cox, S.E.; Ferrier, C.E. Large-scale Aerial Images Capture Details of Invasive Plant Populations. Rangel. Ecol. Manag. 2007, 60, 523–528. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| September 2014 | March 2015 | September 2015 | |
|---|---|---|---|
| Mean flying altitude | 95.7 m | 95.8 m | 103.3 m |
| Nb. of acquired photos | 316 | 168 | 247 |
| Nb. of selected photos for processing | 67 | 150 | 99 |
| Nb. of GCP | 12 | 15 | 15 |
| Nb. of GR | 7 | 8 | 8 |
| September 2014 | March 2015 | September 2015 | |
|---|---|---|---|
| Point cloud density | 550.5 pts/m2 | 565.2 pts/m2 | 495.8 pts/m2 |
| Orthophoto resolution | 2.1 cm/pix | 2.1 cm/pix | 2.2 cm/pix |
| DEM resolution | 4.2 cm/pix | 4.2 cm/pix | 4.5 cm/pix |
| Horiz./Vert. RMSE | 2.5 cm/3.9 cm | 1.5 cm/2.7 cm | 1.6 cm/3.5 cm |
| September 2014 to March 2015 | |
| Positive volume: +309.64 m3 over a surface of 3961.57 m2 (±186.19 m3) | |
| normalized to +7.8 cm | |
| Negative volume: −130.82 m3 over a surface of 3688.53 m2 (±173.36 m3) | |
| normalized to −3.5 cm | |
| March 2015 to September 2015 | |
| Positive volume: +54.12 m3 over a surface of 2444.29 m2 (±107.55 m3) | |
| normalized to +2.2 cm | |
| Negative volume: −360.74 m3 over a surface of 5203.86 m2 (±228.97 m3) | |
| normalized to −6.9 cm | |
| September 2014 to March 2015 | March 2015 to September 2015 | |
|---|---|---|
| ∆z variation measured by the ALTUS | −2.3 cm | +6.0 cm |
| ∆z variation on the ring of 2 m radius | −4.9 cm (±4.7 cm) | +3.1 cm (±4.4 cm) |
| ∆z variation on the ring of 5 m radius | −4.2 cm (±4.7 cm) | +2.6 cm (±4.4 cm) |
| ∆z variation on the ring of 10 m radius | −3.7 cm (±4.7 cm) | +1.6 cm (±4.4 cm) |
| September 2014 to March 2015 | |
| Total material balance: +425.18 m3 (±180.74 m3) | |
| normalized to +11.0 cm | |
| Positive volume: +686.73 m3 over a surface of 2908.33 m2 (±136.69 m3) | |
| normalized to + 23.6 cm | |
| Negative volume: −261.55 m3 over a surface of 937.26 m2 (±44.05 m3) | |
| normalized to −27.9 cm | |
| March 2015 to September 2015 | |
| Total material balance: −402.94 m3 (±167.51 m3) | |
| normalized to −10.6 cm | |
| Positive volume: +314.06 m3 over a surface of 1058.47 m2 (±46.57 m3) | |
| normalized to +29.7 cm | |
| Negative volume: −717.00 m3 over a surface of 2748.59 m2 (±120.93 m3) | |
| normalized to −26.1 cm | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jaud, M.; Grasso, F.; Le Dantec, N.; Verney, R.; Delacourt, C.; Ammann, J.; Deloffre, J.; Grandjean, P. Potential of UAVs for Monitoring Mudflat Morphodynamics (Application to the Seine Estuary, France). ISPRS Int. J. Geo-Inf. 2016, 5, 50. https://doi.org/10.3390/ijgi5040050
Jaud M, Grasso F, Le Dantec N, Verney R, Delacourt C, Ammann J, Deloffre J, Grandjean P. Potential of UAVs for Monitoring Mudflat Morphodynamics (Application to the Seine Estuary, France). ISPRS International Journal of Geo-Information. 2016; 5(4):50. https://doi.org/10.3390/ijgi5040050
Chicago/Turabian StyleJaud, Marion, Florent Grasso, Nicolas Le Dantec, Romaric Verney, Christophe Delacourt, Jérôme Ammann, Julien Deloffre, and Philippe Grandjean. 2016. "Potential of UAVs for Monitoring Mudflat Morphodynamics (Application to the Seine Estuary, France)" ISPRS International Journal of Geo-Information 5, no. 4: 50. https://doi.org/10.3390/ijgi5040050
APA StyleJaud, M., Grasso, F., Le Dantec, N., Verney, R., Delacourt, C., Ammann, J., Deloffre, J., & Grandjean, P. (2016). Potential of UAVs for Monitoring Mudflat Morphodynamics (Application to the Seine Estuary, France). ISPRS International Journal of Geo-Information, 5(4), 50. https://doi.org/10.3390/ijgi5040050