
Dam Deformation Monitoring Data Analysis Using Space-Time Kalman Filter


Abstract
:1. Introduction
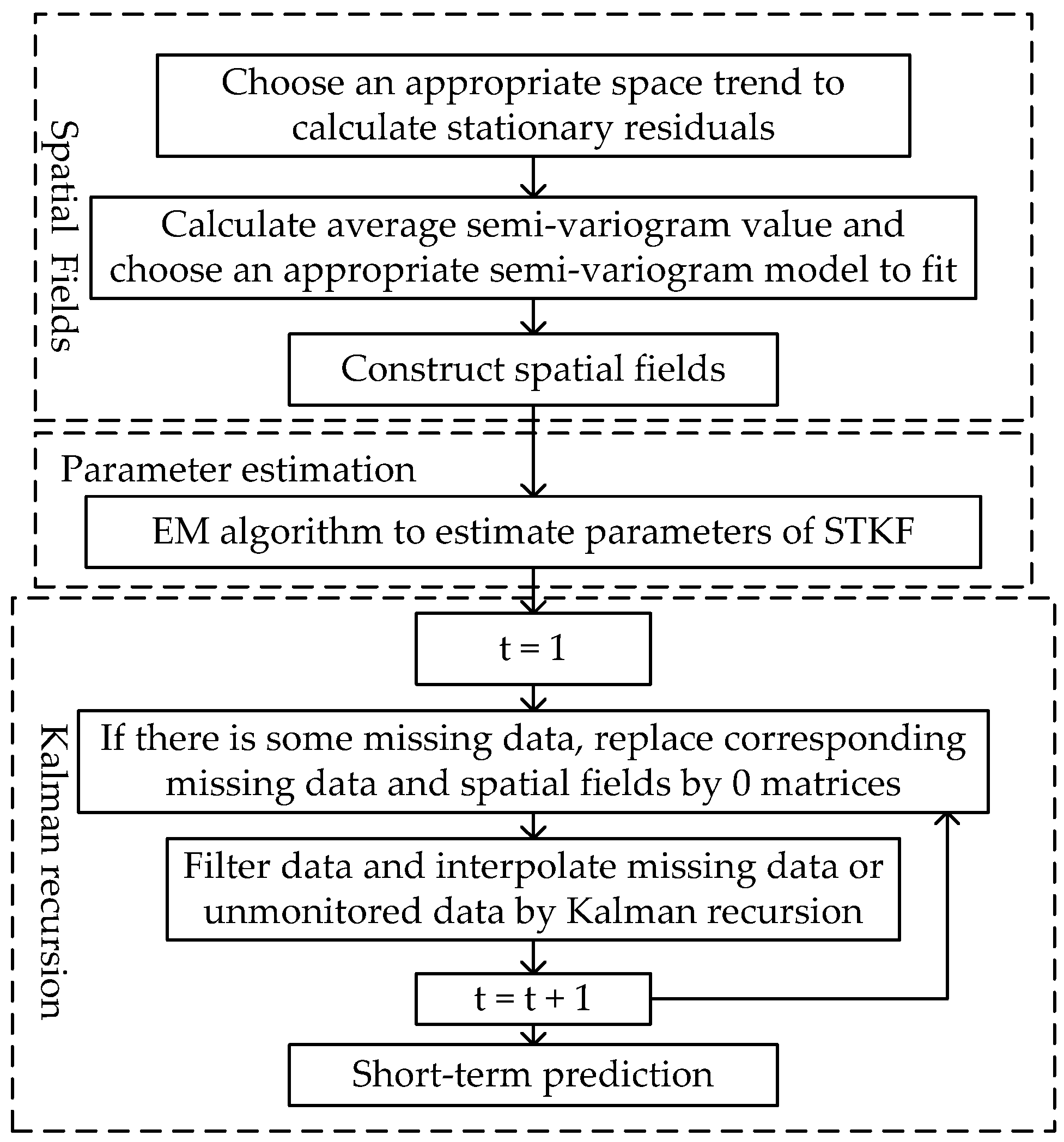
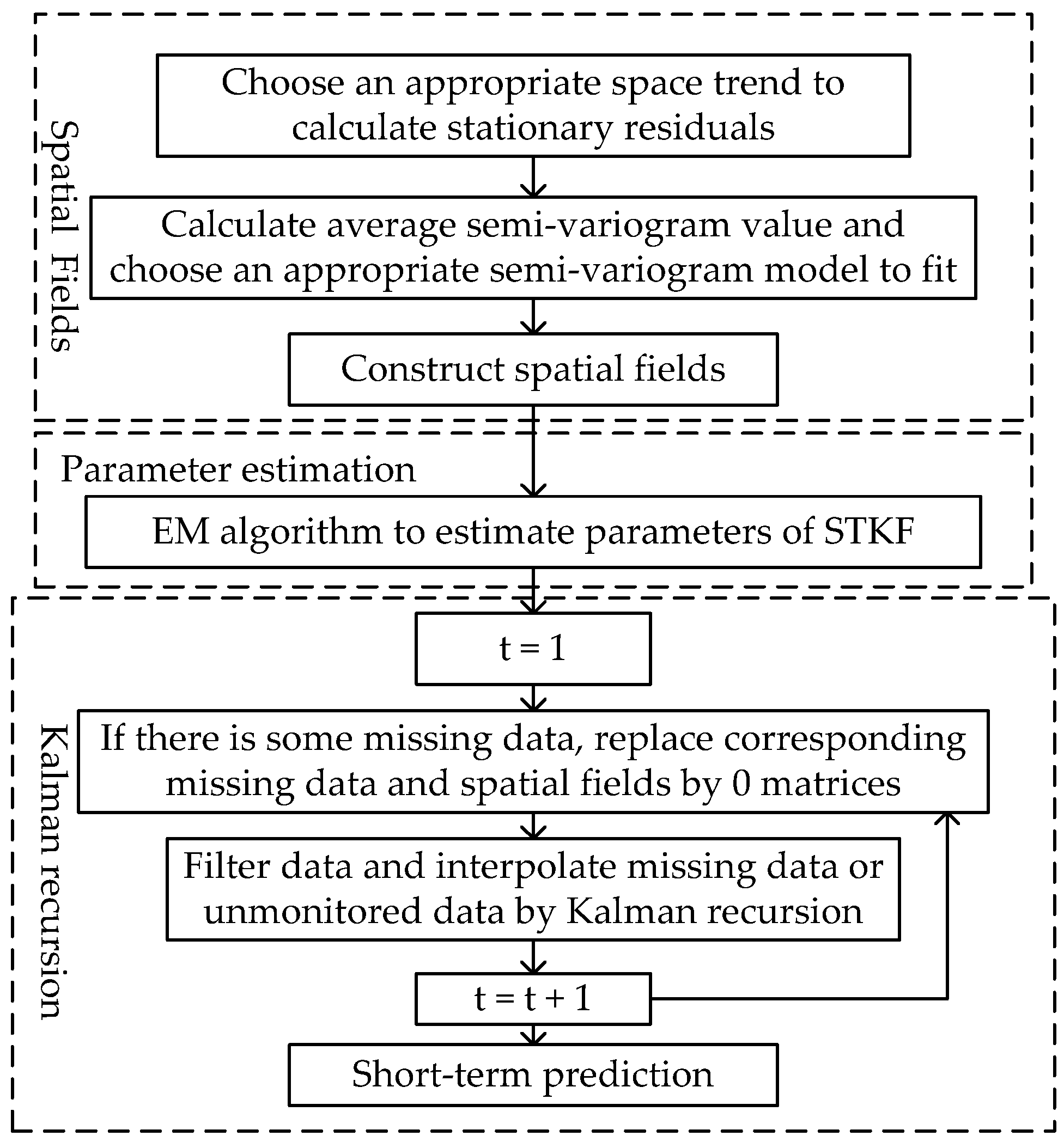
2. Space-Time Kalman Filter Model
2.1. Mathematical Model
2.2. Spatial Fields
2.3. Parameters Estimation
- Use Kalman smoother to estimate the unknown state parameter with respect to the iterated value .
- E step: calculate the conditional expectation of under the estimated distribution in step 1, where is the expectation operator.
- M step: maximize , which yields the newly iterated value .
- Replace with , and repeat steps 1, 2, and 3 until the logarithm of joint likelihood function or the innovations form [23] stop increasing.
2.4. Denoising, Space-Time Interpolation, and Prediction
3. Simulation Experiment
4. Application
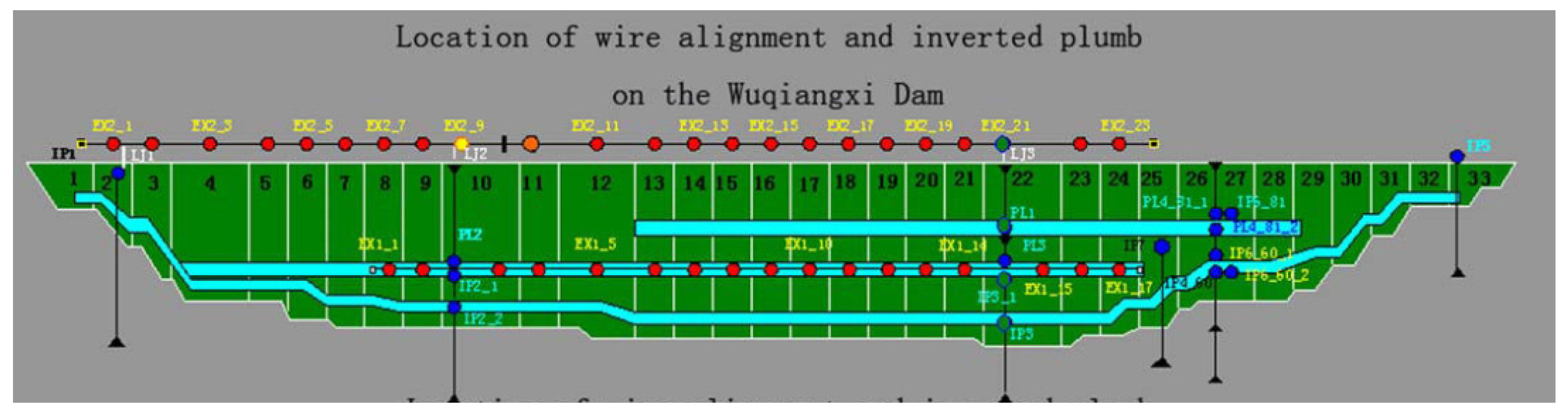
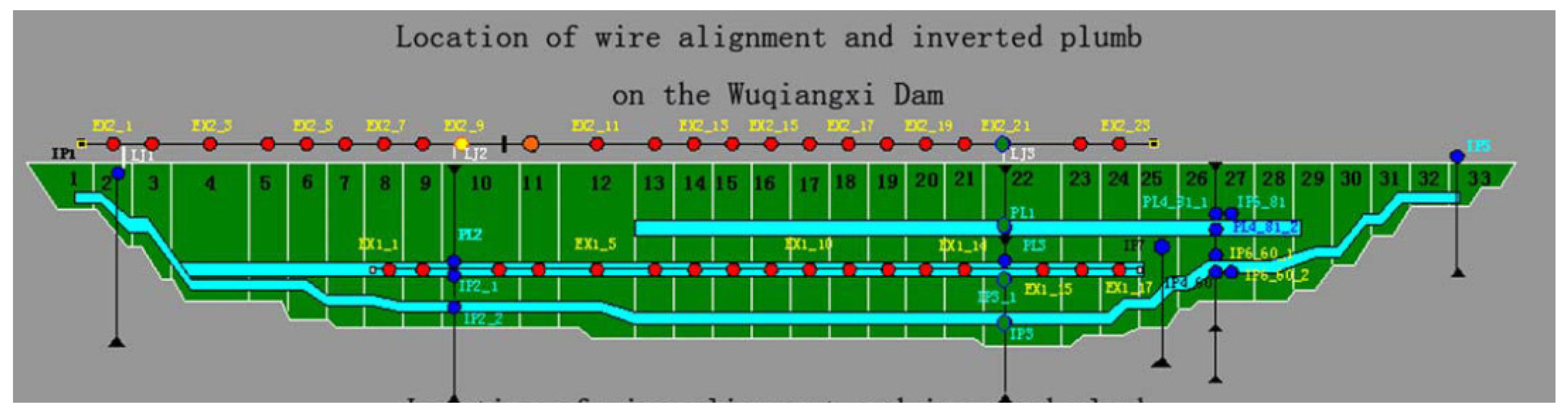
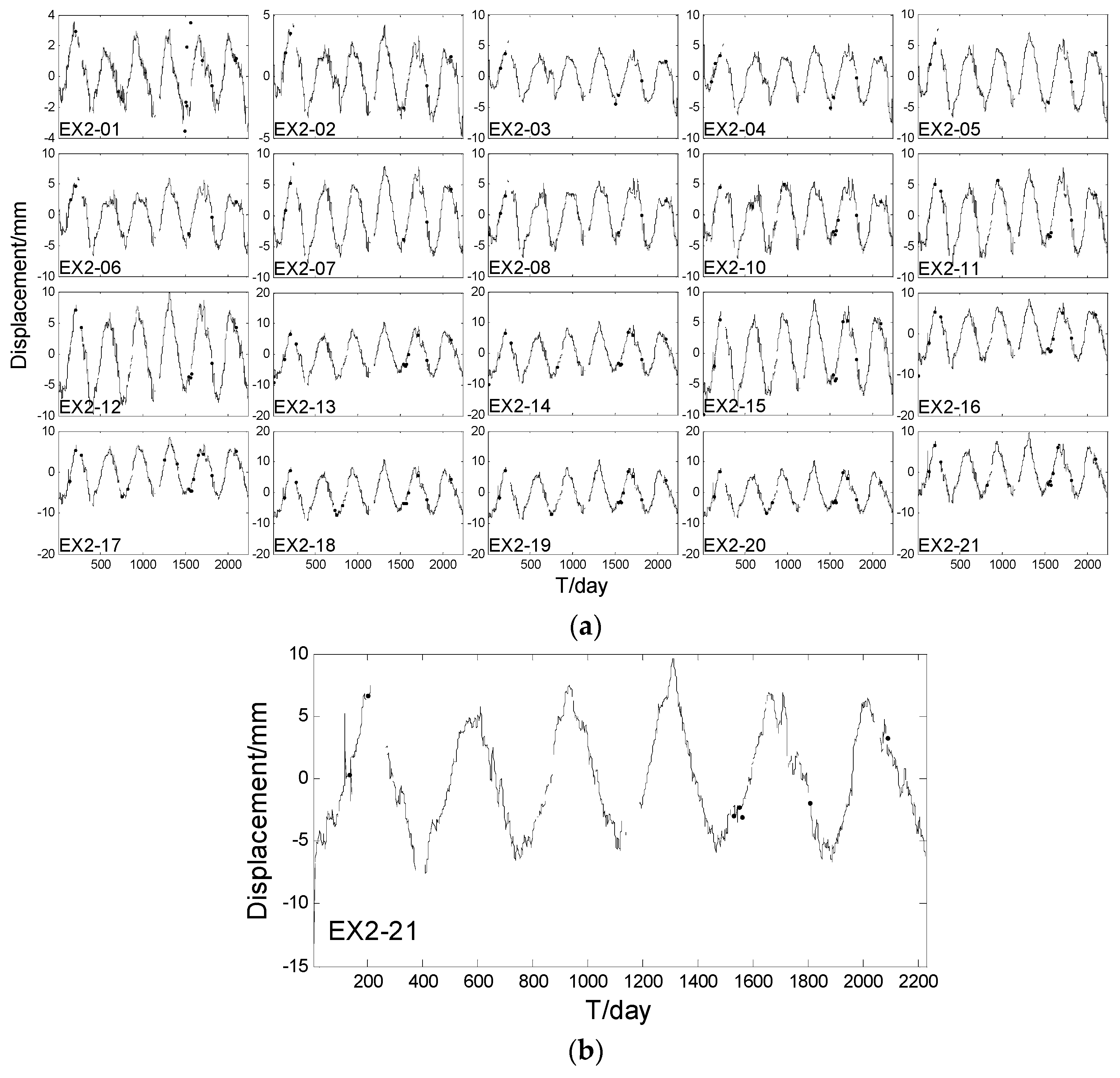
4.1. Description of Wuqiangxi Dam Tension Wire Alignment Data
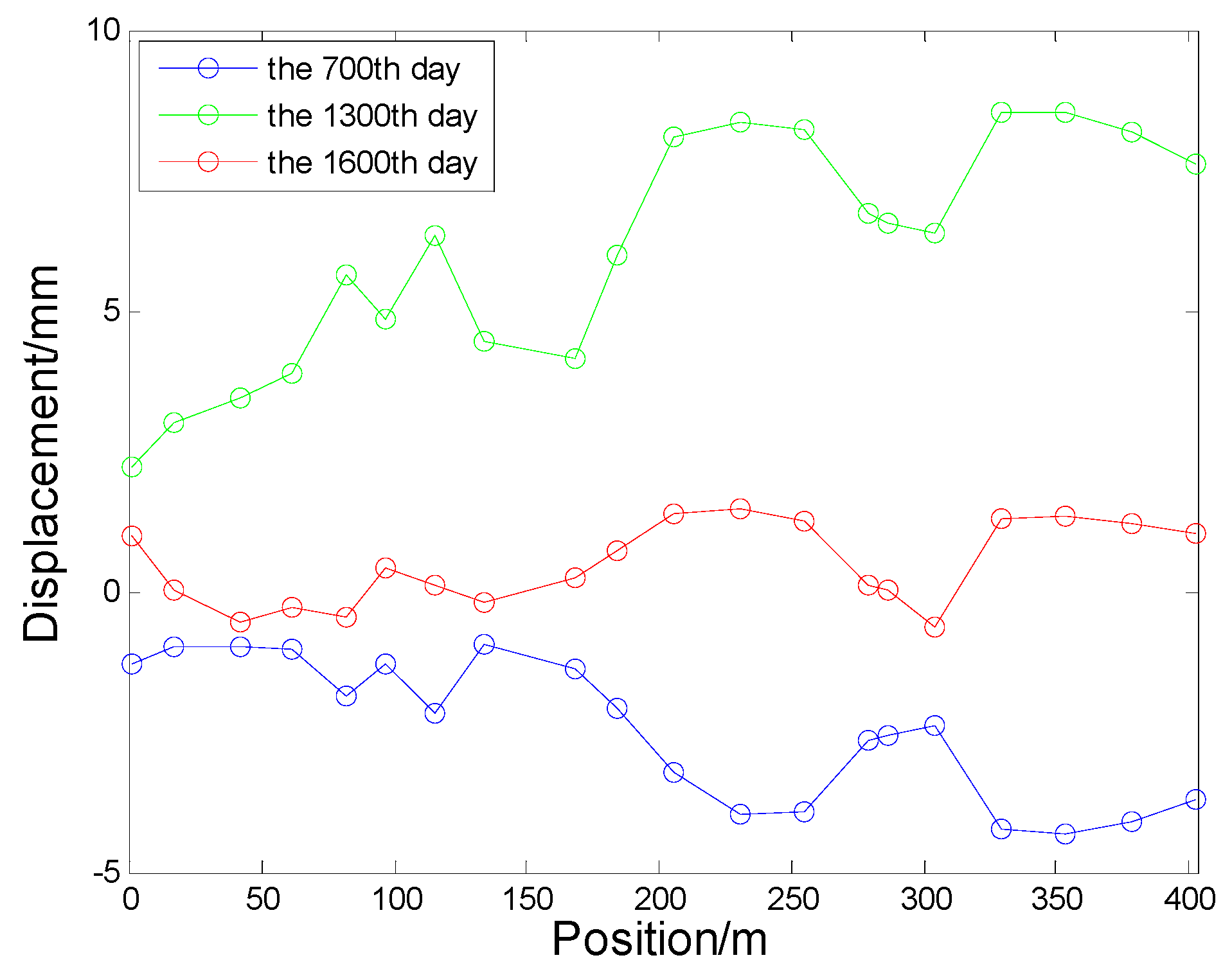
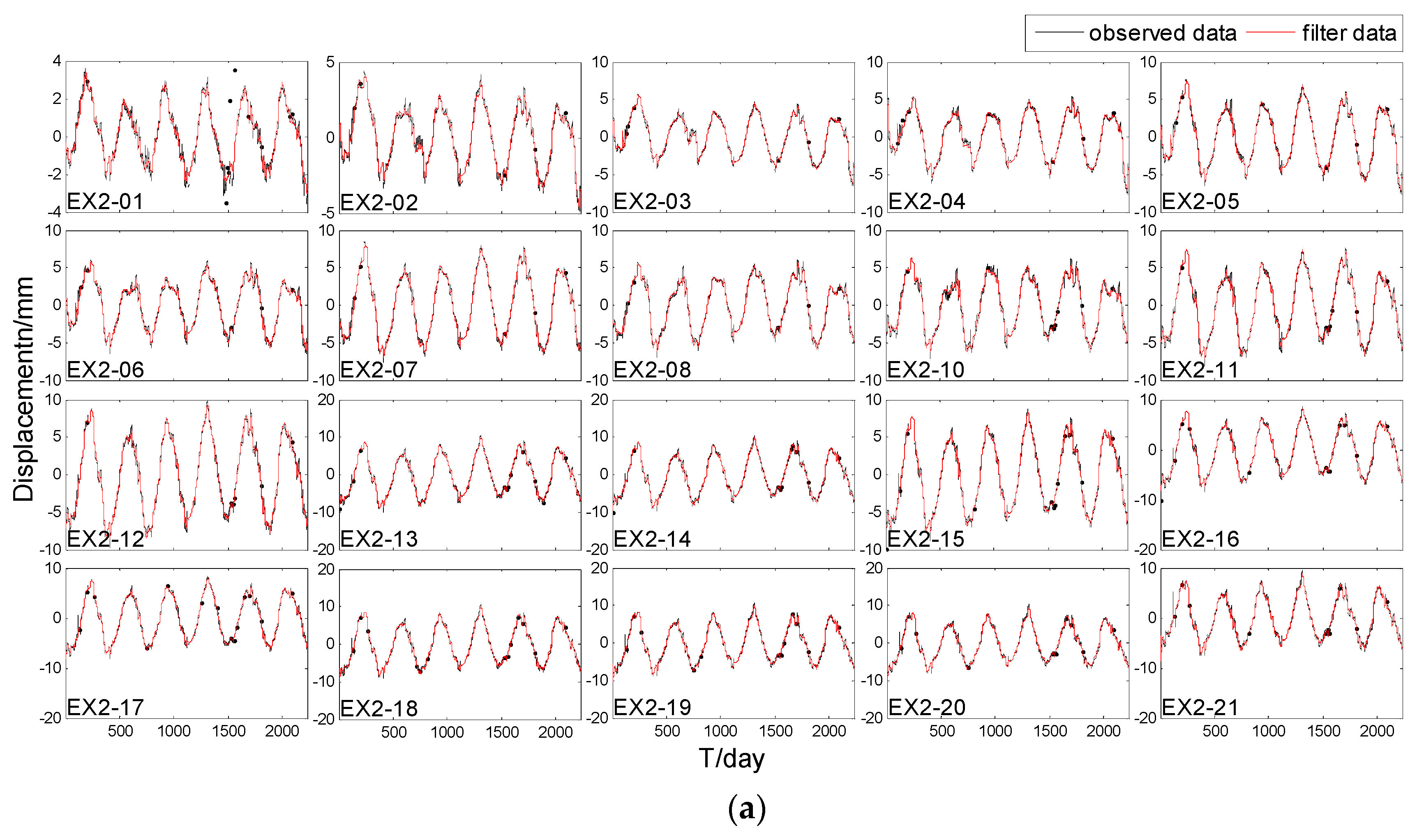
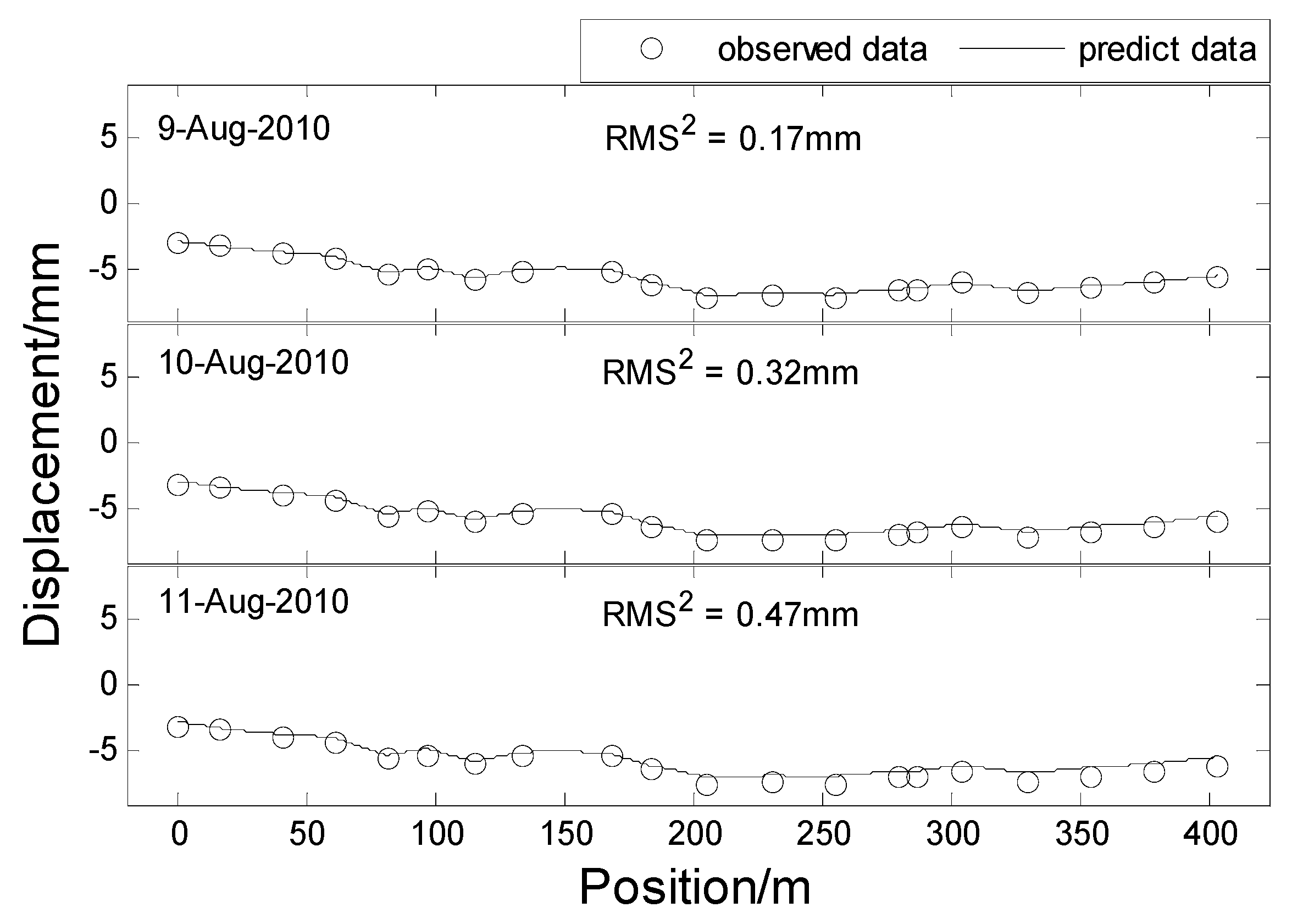
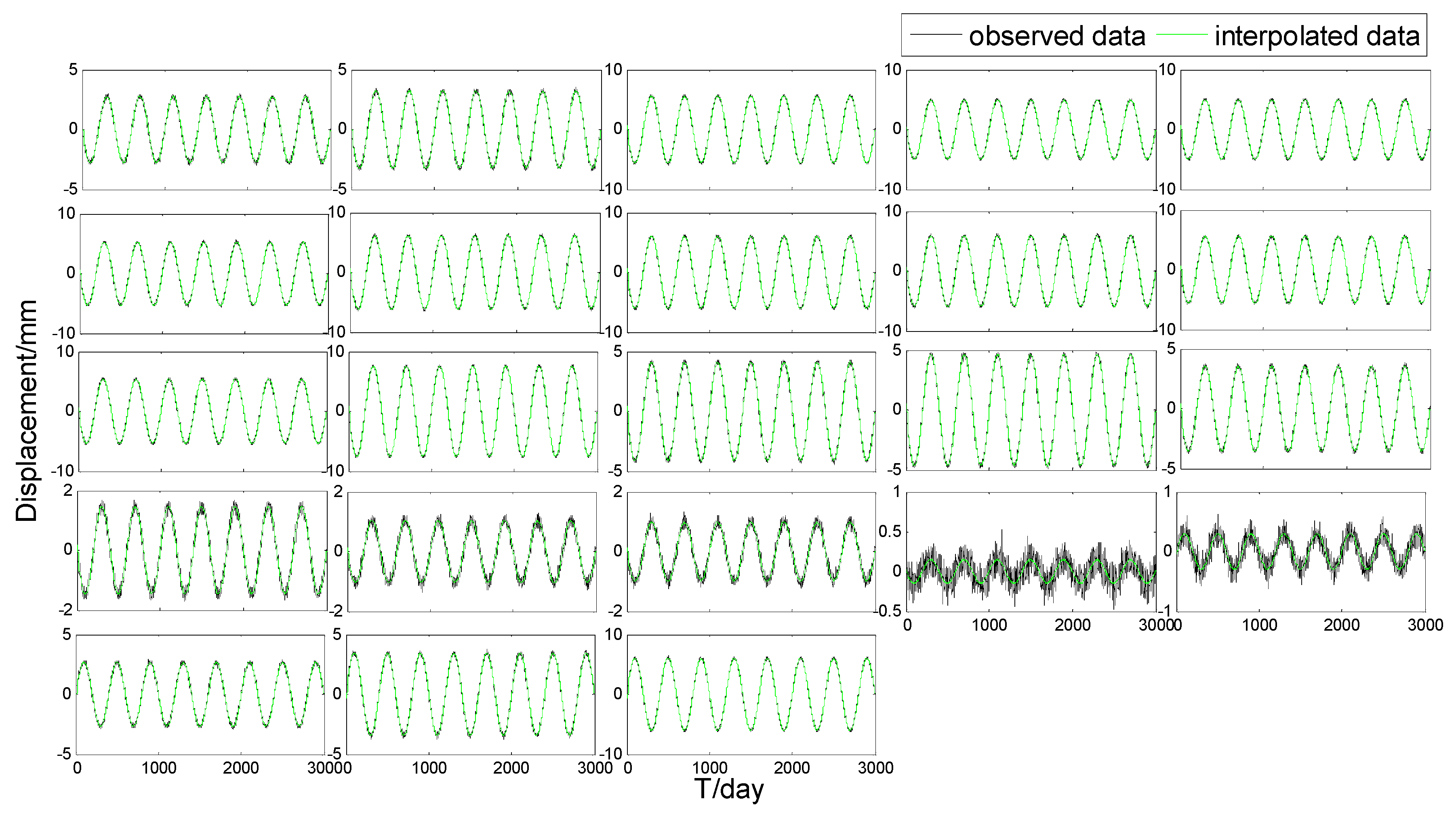
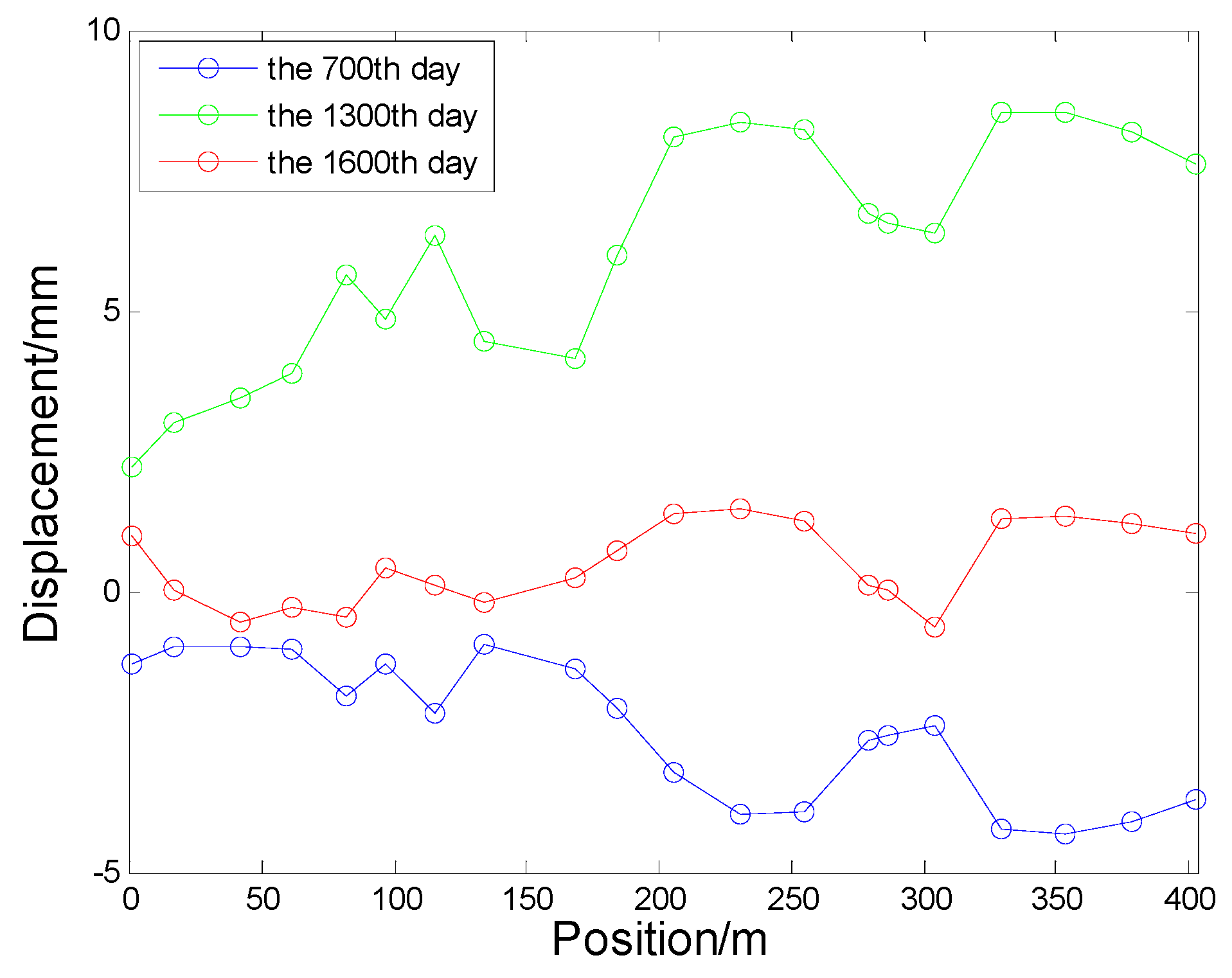
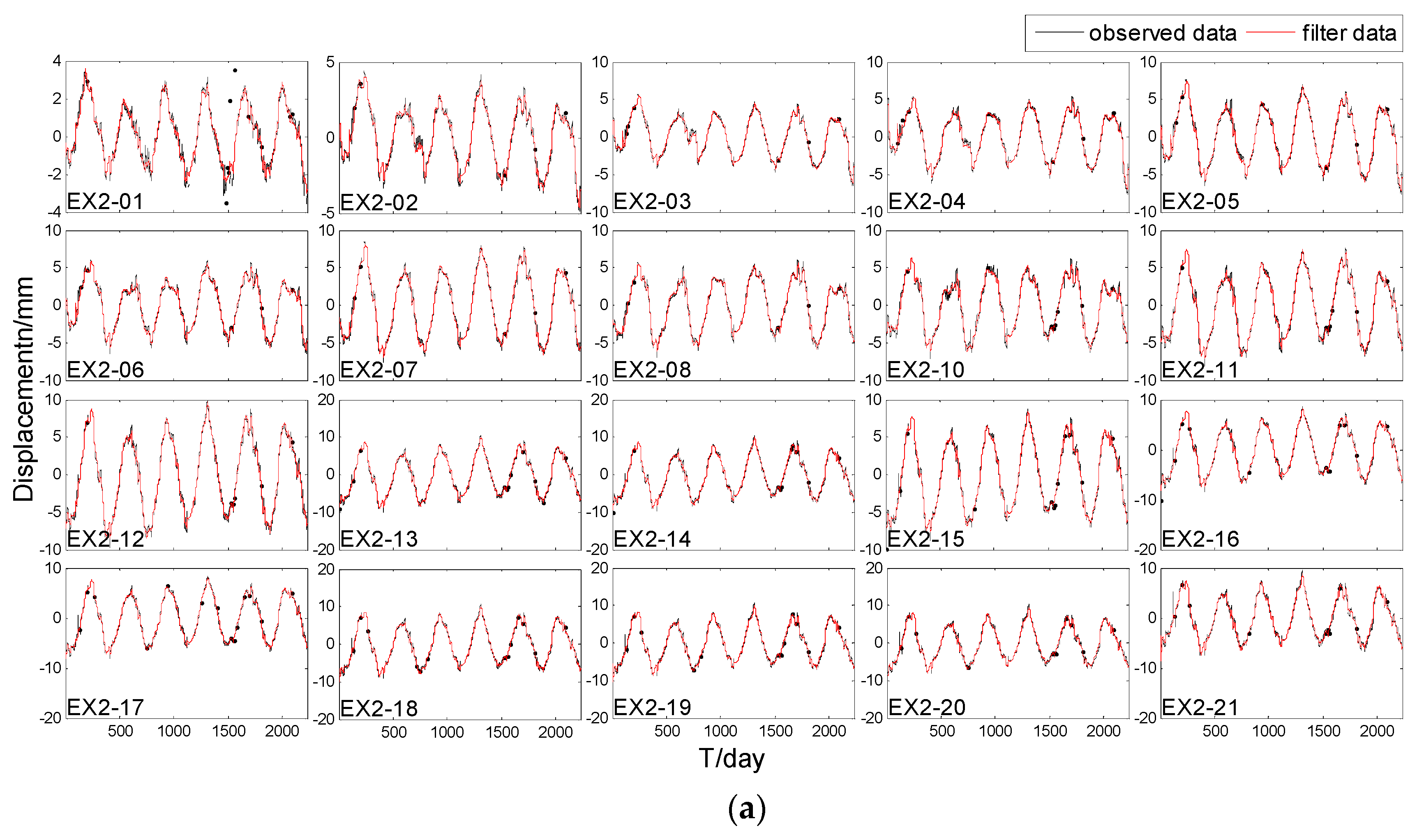
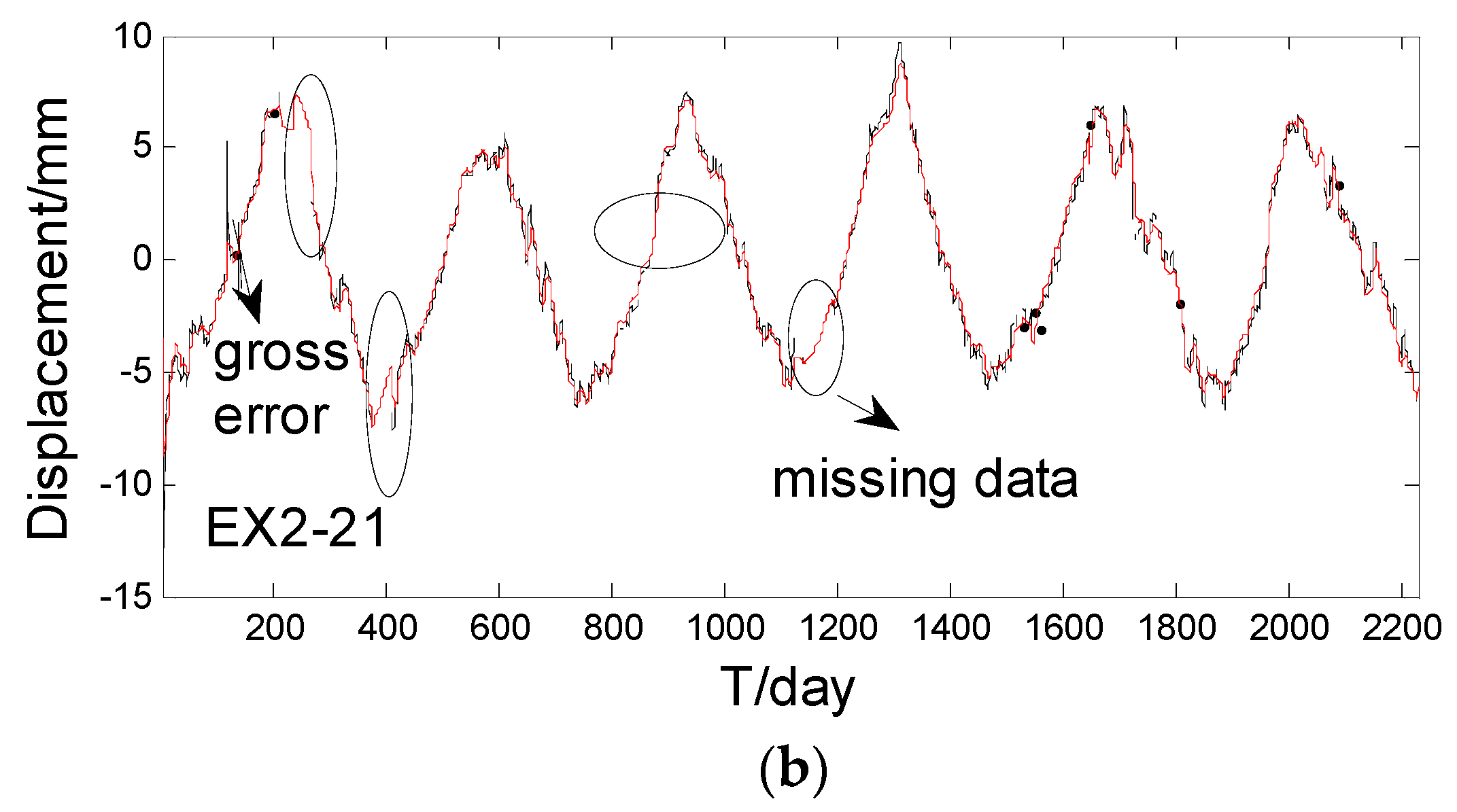
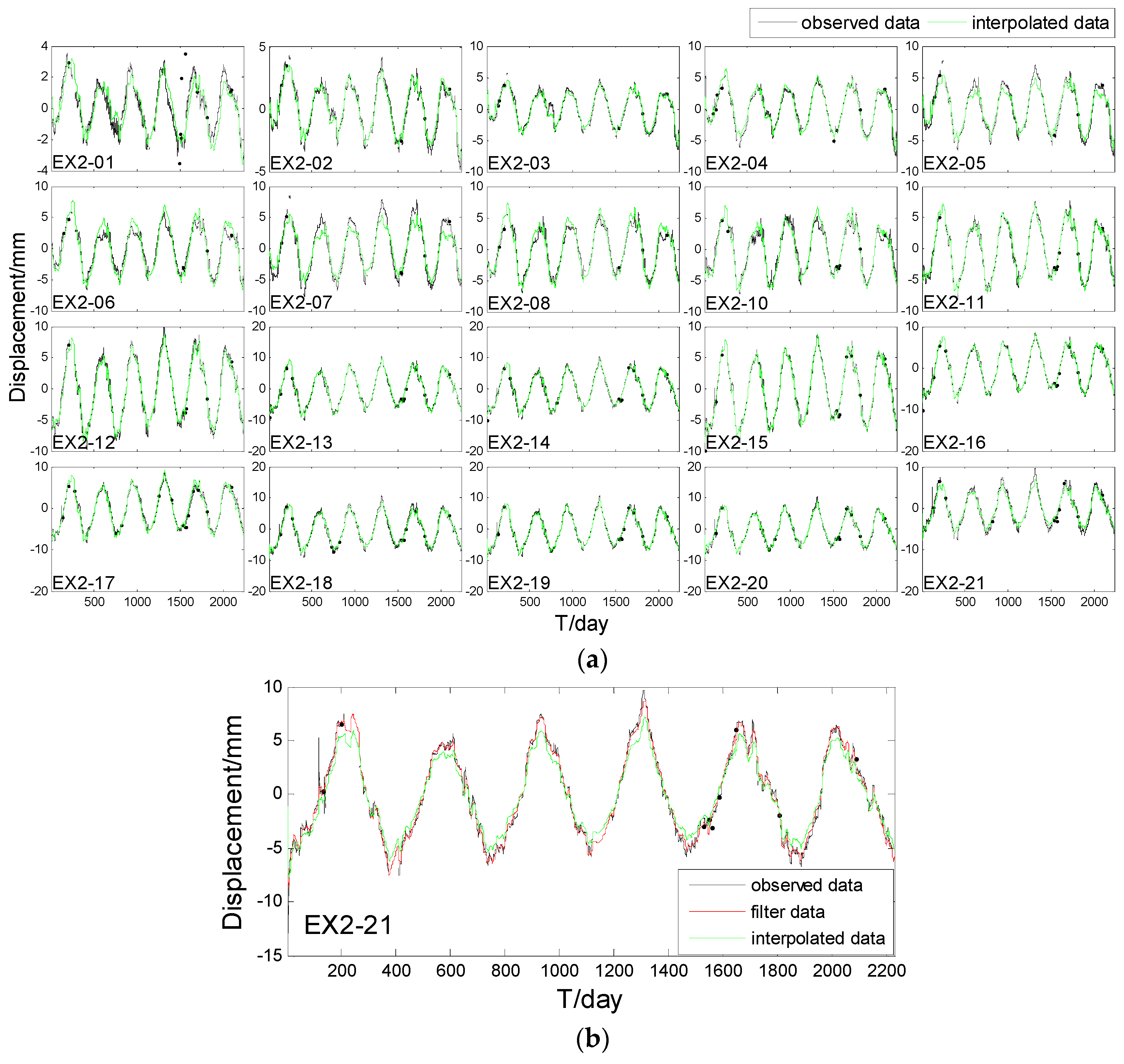
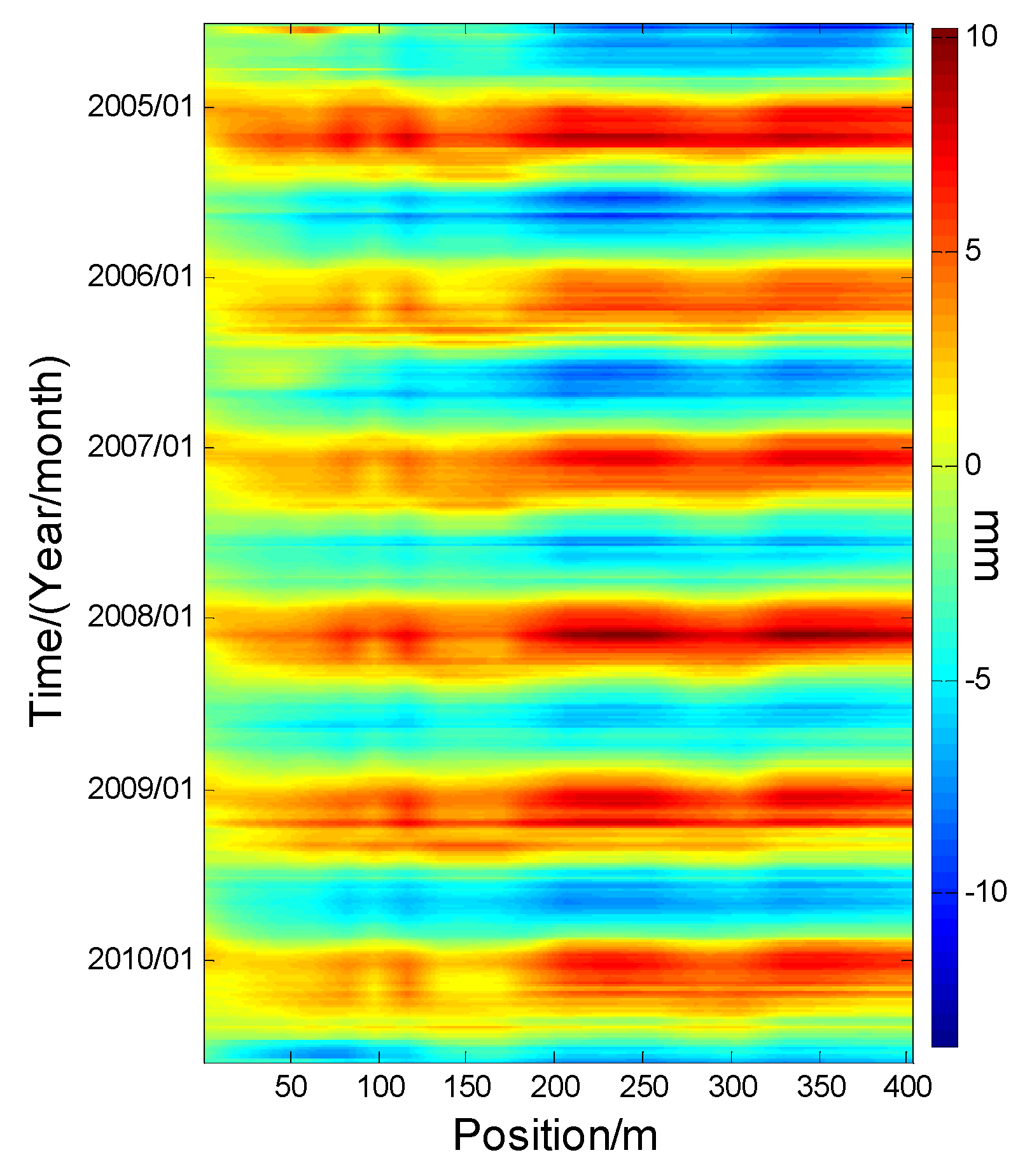
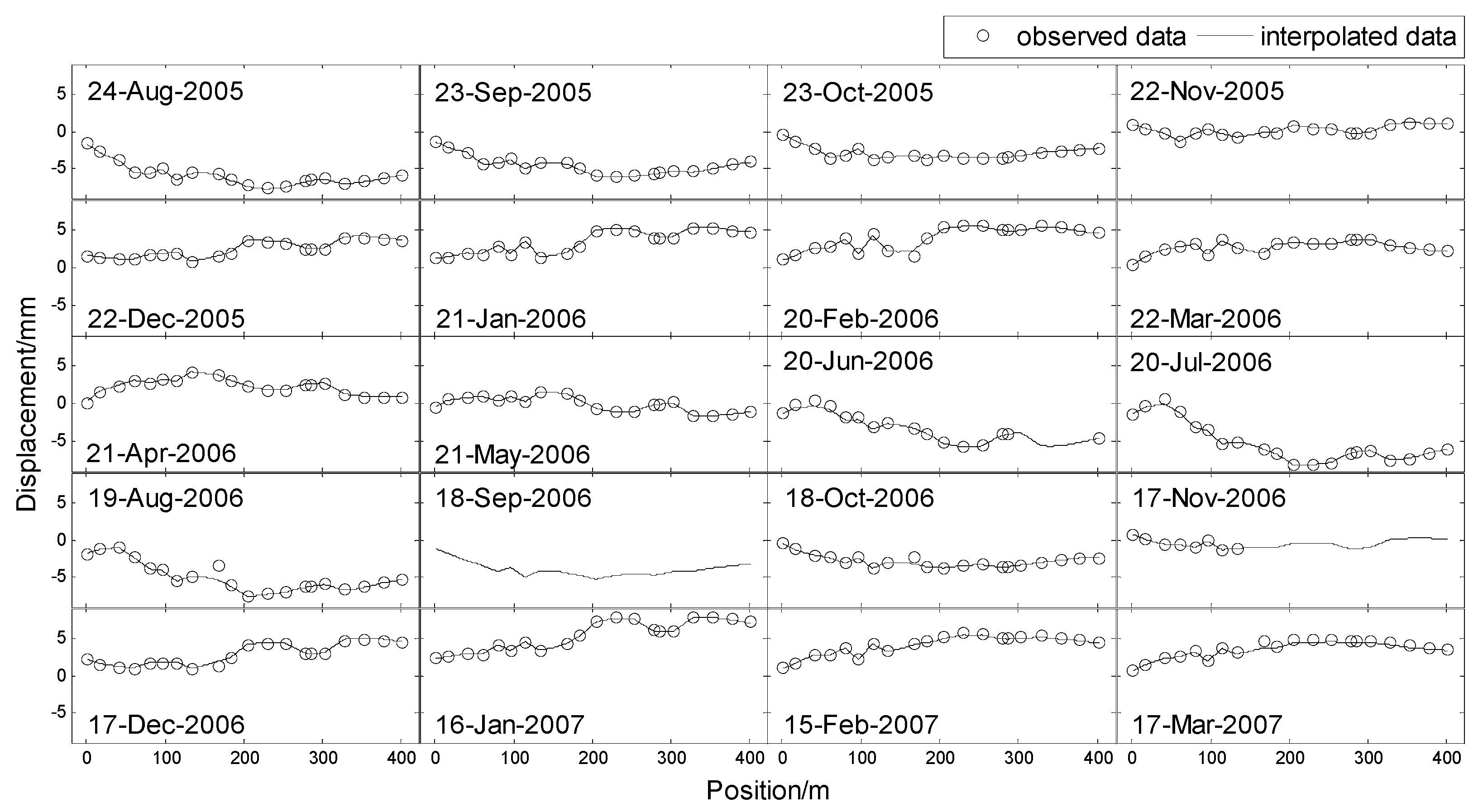
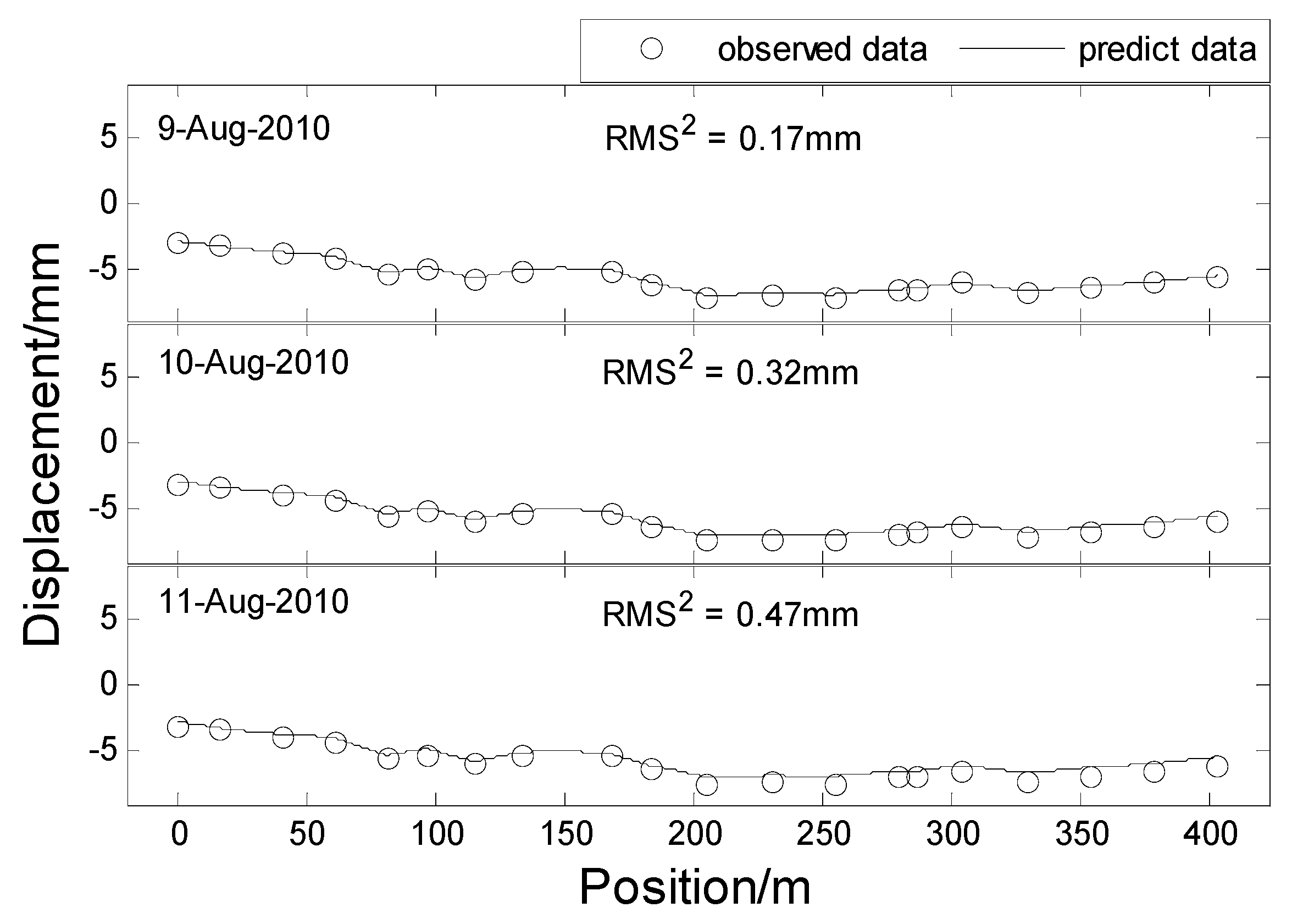
4.2. Filtering, Spatiotemporal Interpolation, and Prediction
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wu, Z.R. Introduction. In Safety Monitoring Theory & Its Application of Hydraulic Structures; Higher Education Press: Beijing, China, 2003; pp. 1–2. (In Chinese) [Google Scholar]
- Ince, C.D.; Sahin, M. Real-time deformation monitoring with GPS and Kalman Filter. Earth Planets Space 2000, 52, 837–840. [Google Scholar] [CrossRef]
- Wang, Q.; Sun, H.; Li, W.; Wang, X. Application of Kalman filter analysis method in the deformation monitoring data procession. Chin. J. Eng. Geophys. 2009, 6, 658–661. [Google Scholar]
- Li, L.; Kuhlmann, H. Real-time deformation measurements using time series of GPS coordinates processed by Kalman filter with shaping filter. Surv. Rev. 2012, 44, 189–197. [Google Scholar] [CrossRef]
- Yang, Y.X.; He, H.B.; Xu, G.C. Adaptively robust filtering for kinematic geodetic positioning. J. Geodesy 2001, 75, 109–116. [Google Scholar] [CrossRef]
- Kuhlmann, H. Kalman-filtering with coloured measurement noise for deformation analysis. In Proceedings of 11th FIG Symposium on Deformation Measurements, Santorini, Greece, 25–28 May 2003.
- Szostak-Chrzanowski, A.; Chrzanowski, A.; Massiéra, M. Use of deformation monitoring results in solving geomechanical problems—Case studies. Eng. Geol. 2005, 79, 3–12. [Google Scholar] [CrossRef]
- Dai, W.J.; Liu, B.; Meng, X.X.; Huang, D.W. Spatio-temporal modelling of dam deformation using independent component analysis. Surv. Rev. 2014, 46, 437–443. [Google Scholar] [CrossRef]
- Cressie, N. Comment on ‘An approach to statistical spatial-temporal modeling of meteorological fields’ by MS Handcock and JR Wallis. J. Am. Stat. Assoc. 1994, 89, 379–382. [Google Scholar]
- Huang, H.C.; Cressie, N. Spatio-temporal prediction of snow water equivalent using the Kalman filter. Comput. Stat. Data Anal. 1996, 22, 159–175. [Google Scholar] [CrossRef]
- Goodall, C.; Mardia, K.V. Challenges in multivariate spatio-temporal modeling. In Proceedings of the XVIIth International Biometric Conference, Hamilton, ON, Canada, 8–12 August 1994.
- Mardia, K.V.; Goodall, C.; Redfern, E.J.; Alonso, F.J. The Kriged Kalman filter. Test 1998, 7, 217–282. [Google Scholar] [CrossRef]
- Wikle, C.K.; Cressie, N. A dimension-reduced approach to space-time Kalman filtering. Biometrika 1999, 86, 815–829. [Google Scholar] [CrossRef]
- Cressie, N.; Wikle, C.K. Space-time Kalman filter. In Encyclopedia of Environmetrics; El-Shaarawi, A.H., Piegorsch, W.W., Eds.; John Wiley & Sons: New York, NY, USA, 2002; Volume 4, pp. 2045–2049. [Google Scholar]
- Cortés, J. Distributed Kriged Kalman filter for spatial estimation. IEEE Trans. Auto. Control 2009, 54, 2816–2827. [Google Scholar] [CrossRef]
- Sahu, S.K.; Mardia, K.V. A Bayesian kriged Kalman model for short-term forecasting of air pollution levels. J. R. Stat. Soc. C 2005, 54, 223–244. [Google Scholar] [CrossRef]
- Lasinio, G.J.; Sahu, S.K.; Mardia, K.V. Modeling rainfall data using a Bayesian Kriged-Kalman model. In Bayesian Statistics and Its Applications; Upadhy, S.K., Singh, U., Dey, D.K., Eds.; Anshan: Tunbridge Wells, UK, 2006. [Google Scholar]
- Al-Awadhi, F.A.; Alhajraf, A. Prediction of non-methane hydrocarbons in Kuwait using regression and Bayesian Kriged Kalman model. Env. Ecol. Stat. 2012, 19, 393–412. [Google Scholar] [CrossRef]
- Qing, X.Y.; Yang, F.W.; Wang, X.Y. Short-term wind speed forecasting for multiple wind farms using Bayesian Kriged-Kalman mode. Proc. Chin. Soc. Electr. Eng. 2012, 32, 107–114. [Google Scholar]
- Cressie, N. Spatial Prediction and Kriging. In Statistics for Spatial Data, 1st ed.; John Wiley & Sons: New York, NY, USA, 1993; pp. 105–210. [Google Scholar]
- Sherman, M. Geostatistics. In Spatial Statistics and Spatio-Temporal Data: Covariance Functions and Directional Properties, 1st ed.; John Wiley & Sons: New York, NY, USA, 2011; pp. 21–44. [Google Scholar]
- Bookstein, F.L. Principal warps: Thin-plate splines and the decomposition of deformations. IEEE Trans. Patt. Anal. 1989, 11, 567–585. [Google Scholar] [CrossRef]
- Shumway, R.H.; Stoffer, D.S. An approach to time series smoothing and forecasting using the EM algorithm. J. Time Ser. Anal. 1982, 3, 253–264. [Google Scholar] [CrossRef]
- Oliver, M.A.; Webster, R. A tutorial guide to geostatistics: Computing and modelling variograms and kriging. Catena 2014, 113, 56–69. [Google Scholar] [CrossRef]
- Dai, W.J.; Huang, D.W.; Liu, B. A phase space reconstruction based single channel ICA algorithm and its application in dam deformation analysis. Surv. Rev. 2015, 47, 387–396. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Interp | Filter | Pred | Site | Interp | Filter | Pred | Site | Interp | Filter | Pred |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.019 | 0.022 | 0.030 | 9 | 0.039 | 0.043 | 0.059 | 17 | 0.014 | 0.019 | 0.038 |
| 2 | 0.024 | 0.025 | 0.056 | 10 | 0.037 | 0.037 | 0.073 | 18 | 0.009 | 0.017 | 0.029 |
| 3 | 0.026 | 0.029 | 0.051 | 11 | 0.036 | 0.036 | 0.077 | 19 | 0.004 | 0.012 | 0.003 |
| 4 | 0.030 | 0.032 | 0.055 | 12 | 0.034 | 0.034 | 0.068 | 20 | 0.008 | 0.013 | 0.008 |
| 5 | 0.033 | 0.035 | 0.061 | 13 | 0.031 | 0.032 | 0.064 | 21 | 0.015 | 0.017 | 0.033 |
| 6 | 0.035 | 0.035 | 0.081 | 14 | 0.028 | 0.029 | 0.055 | 22 | 0.023 | 0.025 | 0.040 |
| 7 | 0.037 | 0.037 | 0.091 | 15 | 0.024 | 0.027 | 0.042 | 23 | 0.032 | 0.034 | 0.057 |
| 8 | 0.037 | 0.037 | 0.072 | 16 | 0.019 | 0.022 | 0.038 |
| Site | Position | Site | Position | Site | Position | Site | Position |
|---|---|---|---|---|---|---|---|
| EX2_1 | 0.5 | EX2_2 | 17.1 | EX2_3 | 41.6 | EX2_4 | 61.1 |
| EX2_5 | 81.6 | EX2_6 | 97.1 | EX2_7 | 115.6 | EX2_8 | 134.1 |
| EX2_10 | 168.6 | EX2_11 | 184.1 | EX2_12 | 205.6 | EX2_13 | 230.2 |
| EX2_14 | 254.7 | EX2_15 | 279.2 | EX2_16 | 286.2 | EX2_17 | 303.7 |
| EX2_18 | 329.2 | EX2_19 | 353.7 | EX2_20 | 378.2 | EX2_21 | 402.7 |
| Site | Filter | Pred | Interp | Site | Filter | Pred | Interp |
|---|---|---|---|---|---|---|---|
| EX2_1 | 0.05 | 0.43 | 0.45 | EX2_12 | 0.16 | 1.07 | 0.52 |
| EX2_2 | 0.05 | 0.09 | 0.15 | EX2_13 | 0.18 | 1.07 | 0.32 |
| EX2_3 | 0.08 | 0.43 | 0.29 | EX2_14 | 0.18 | 1.14 | 0.45 |
| EX2_4 | 0.12 | 0.38 | 0.41 | EX2_15 | 0.12 | 1.06 | 0.2 |
| EX2_5 | 0.11 | 0.91 | 0.84 | EX2_16 | 0.12 | 1.05 | 0.19 |
| EX2_6 | 0.11 | 0.31 | 1.12 | EX2_17 | 0.12 | 0.31 | 0.53 |
| EX2_7 | 0.11 | 0.84 | 1.67 | EX2_18 | 0.2 | 0.70 | 0.74 |
| EX2_8 | 0.09 | 0.44 | 0.76 | EX2_19 | 0.22 | 0.58 | 0.4 |
| EX2_10 | 0.15 | 0.66 | 0.66 | EX2_20 | 0.23 | 0.41 | 0.42 |
| EX2_11 | 0.12 | 0.93 | 0.28 | EX2_21 | 0.21 | 0.53 | 0.92 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, W.; Liu, N.; Santerre, R.; Pan, J. Dam Deformation Monitoring Data Analysis Using Space-Time Kalman Filter. ISPRS Int. J. Geo-Inf. 2016, 5, 236. https://doi.org/10.3390/ijgi5120236
Dai W, Liu N, Santerre R, Pan J. Dam Deformation Monitoring Data Analysis Using Space-Time Kalman Filter. ISPRS International Journal of Geo-Information. 2016; 5(12):236. https://doi.org/10.3390/ijgi5120236
Chicago/Turabian StyleDai, Wujiao, Ning Liu, Rock Santerre, and Jiabao Pan. 2016. "Dam Deformation Monitoring Data Analysis Using Space-Time Kalman Filter" ISPRS International Journal of Geo-Information 5, no. 12: 236. https://doi.org/10.3390/ijgi5120236
APA StyleDai, W., Liu, N., Santerre, R., & Pan, J. (2016). Dam Deformation Monitoring Data Analysis Using Space-Time Kalman Filter. ISPRS International Journal of Geo-Information, 5(12), 236. https://doi.org/10.3390/ijgi5120236