

Accuracy Evaluation Method for Vector Data Based on Hexagonal Discrete Global Grid



Abstract
1. Introduction
2. Materials and Methods
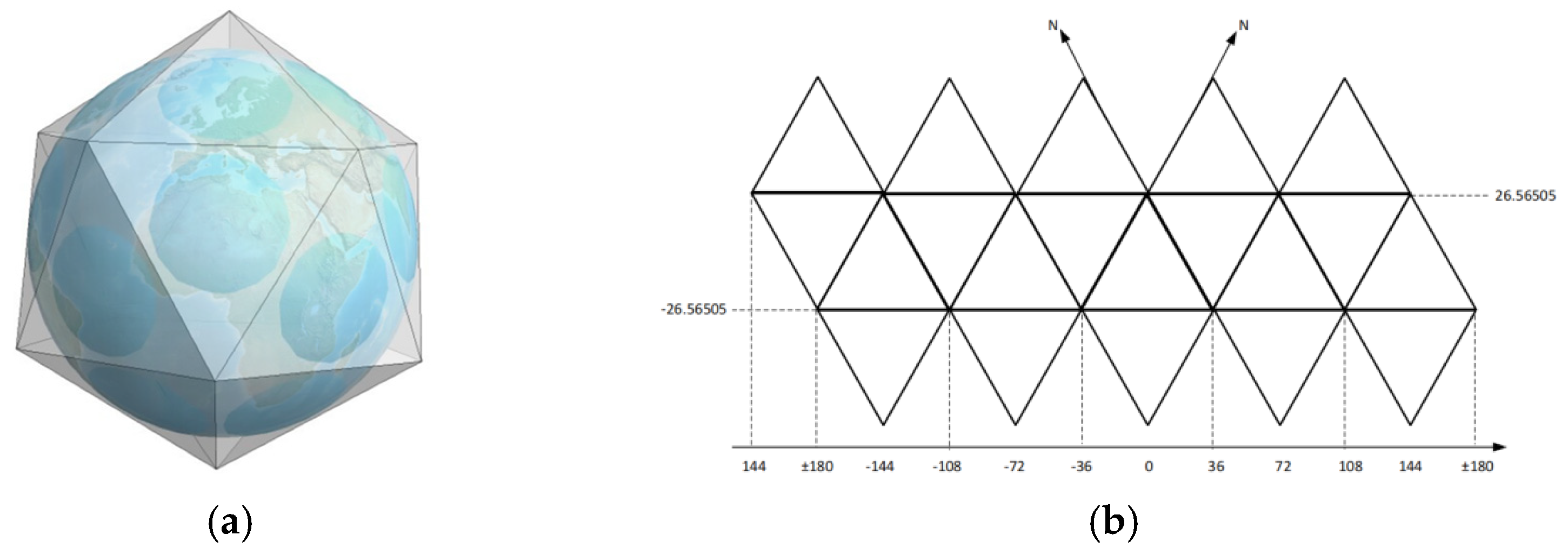
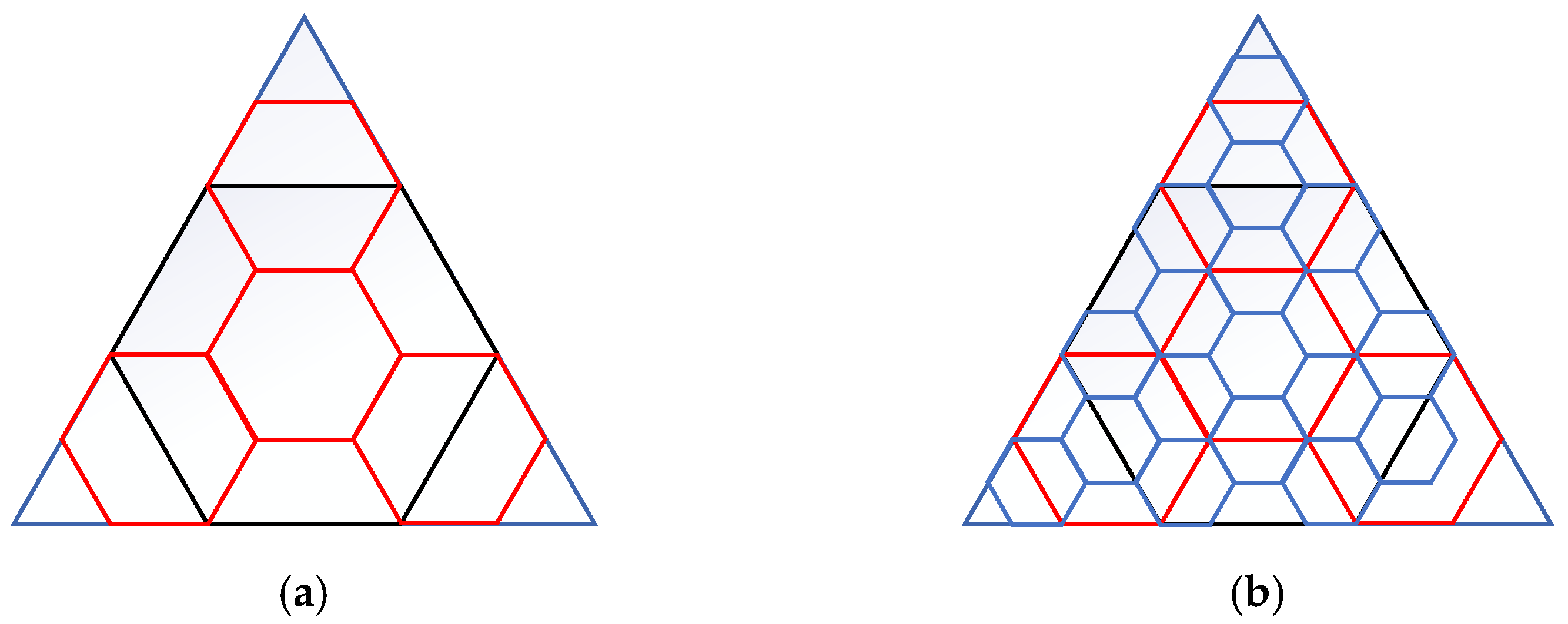
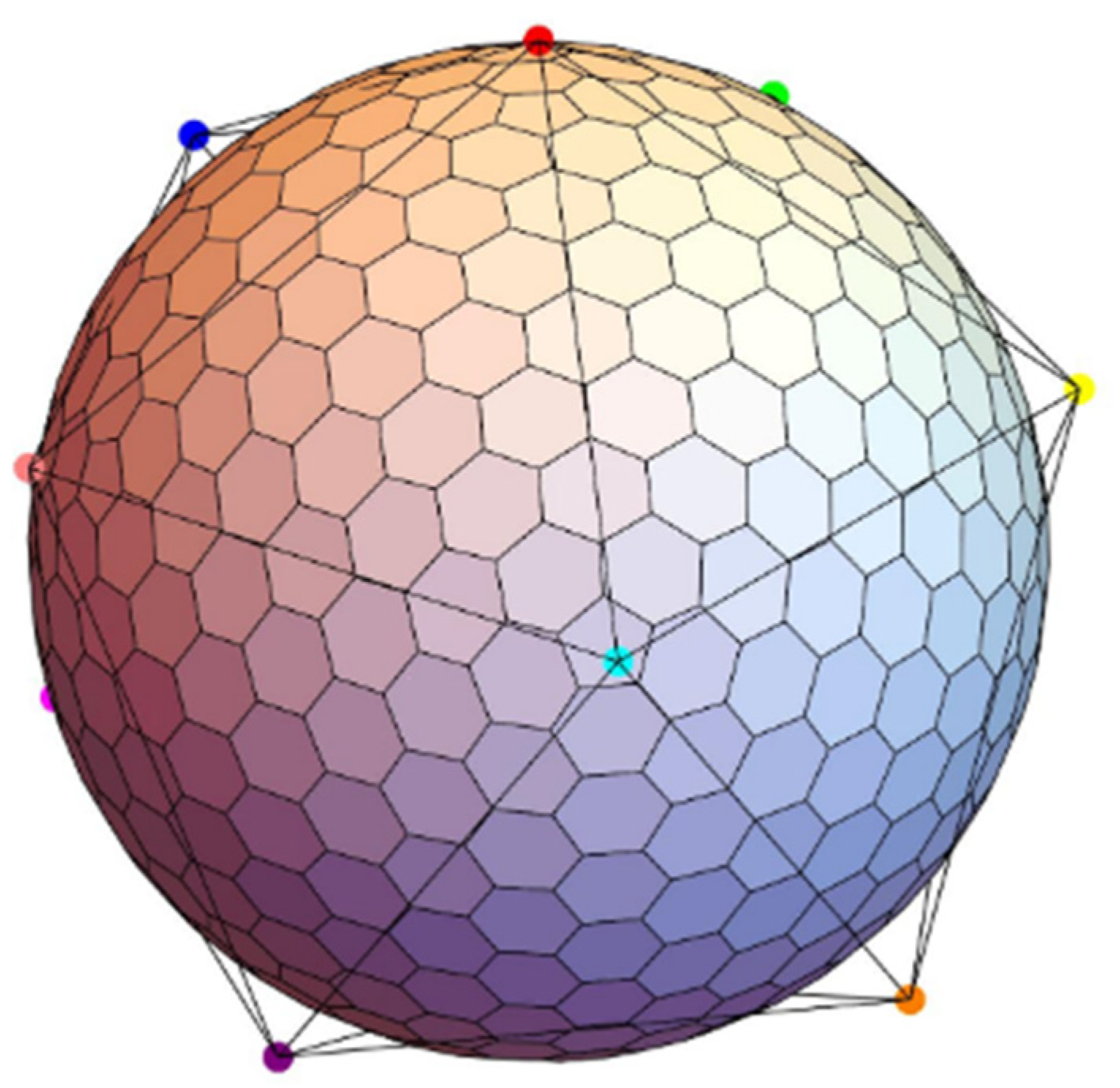
2.1. Construction of Icosahedral Hexagonal Discrete Grid System
2.2. Vector Data Modeling Based on Icosahedral Hexagonal Grid
2.2.1. Coordinate System of Hexagonal Grid
2.2.2. Determination of Gridding Levels
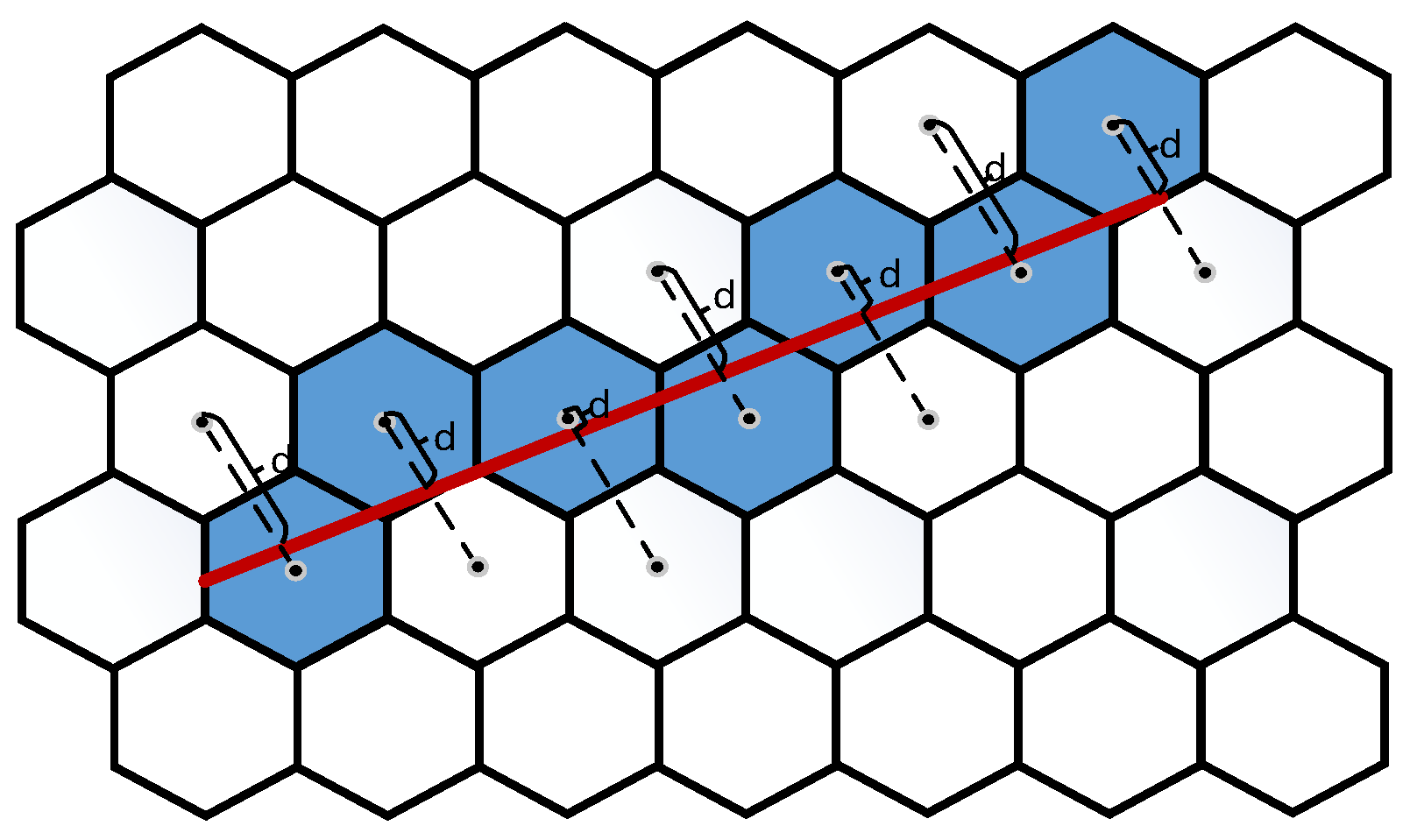
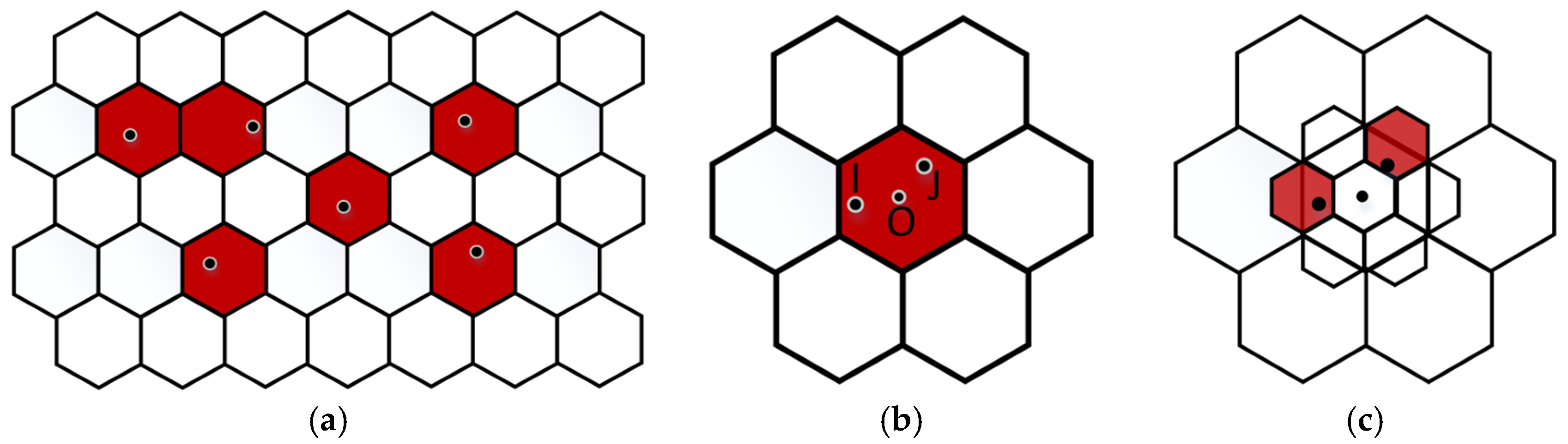
2.2.3. Gridding Method
| Algorithm 1. The Bresenham algorithm |
| //The coordinate system is rotated counterclockwise by 120 degrees to make the cases where the slope is less than or equal to 1 become horizontal dx = x2 − x1 dy = y2 − y1 rx = round(dx * cos(2 * pi/3) − dy * sin(2 * pi/3)) //To obtain the difference in the rotated X-direction ry = round(dx * sin(2 * pi/3) + dy * cos(2 * pi/3)) //To obtain the difference in the rotated Y-direction //The Bresenham algorithm on the horizontal coordinate system is invoked d = 0 y = y1 for x from x1 to x2: yapprox = y + ry/rx if d + abs(yapprox − y)<=0.5: y = yapprox d = d + abs(yapprox − y) else: d = d + abs(yapprox − y) − 1 |
2.3. Accuracy Evaluation of Gridded Vector Data
2.3.1. Error Sources and Classification of Vector Data Gridding
2.3.2. Accuracy Evaluation Metrics for Point Data
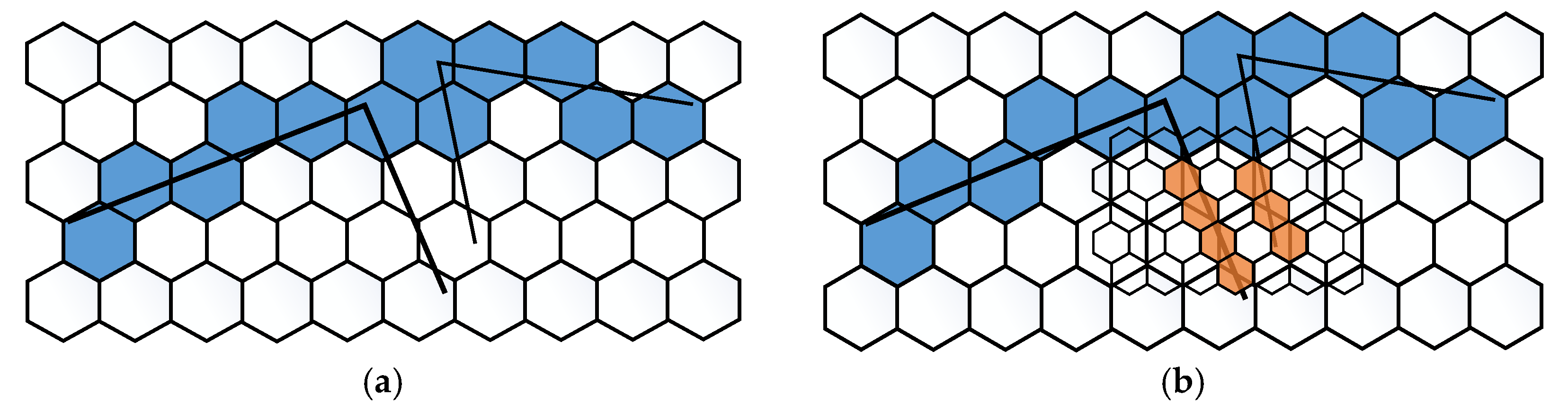
2.3.3. Accuracy Evaluation Metrics for Line Vector Data
- A.
- Disjoint becomes overlap
- B.
- Open line entity becomes closed line entity
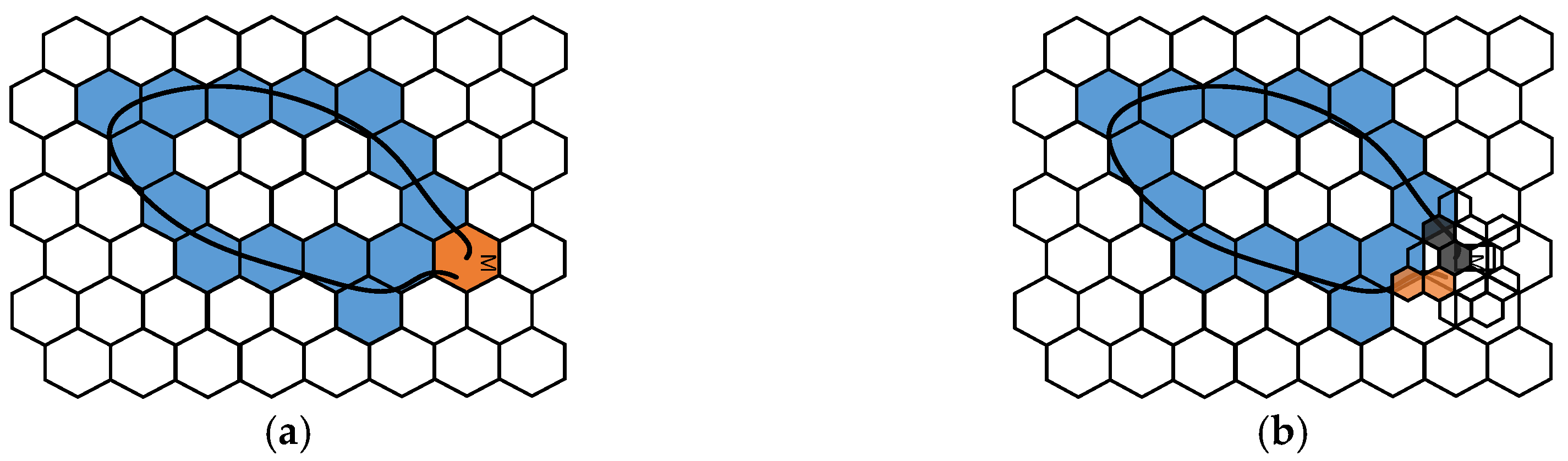
2.3.4. Accuracy Evaluation for Polygon Data
- (1)
- Geographical deviation of polygon vector data
- (2)
- Geometric features of polygon vector data
- A.
- Construction of judgment matrix
- B.
- Determine the weight
- (3)
- Attribute accuracy loss assessment method
- (4)
- Topological feature metrics for polygon vector data
3. Experimental Results and Analysis
3.1. Point Data Conversion and Uncertainty Assessment
3.2. Transformation and Uncertainty Assessment of Line Data
3.3. Transformation of Polygon Data and Uncertainty Assessment
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sahr, K. Central place indexing: Hierarchical linear indexing systems for mixed-aperture hexagonal discrete global grid systems. Cartogr. Int. J. Geogr. Inf. Geovis. 2019, 54, 16–29. [Google Scholar] [CrossRef]
- Yao, X.; Yu, G.; Li, G.; Yan, S.; Zhao, L.; Zhu, D. HexTile: A Hexagonal DGGS-Based Map Tile Algorithm for Visualizing Big Remote Sensing Data in Spark. ISPRS Int. J. Geo-Inf. 2023, 12, 89. [Google Scholar] [CrossRef]
- Zhao, L.; Li, G.; Yao, X.; Ma, Y.; Cao, Q. An optimized hexagonal quadtree encoding and operation scheme for icosahedral hexagonal discrete global grid systems. Int. J. Digit. Earth 2022, 15, 975–1000. [Google Scholar] [CrossRef]
- Nelson, R.C.; Samet, H. A consistent hierarchical representation for vector data. In Proceedings of the 13th Annual Conference on Computer Graphics and Interactive Techniques, Dallas, TX, USA, 31 August 1986; Volume 20, pp. 197–206. [Google Scholar]
- Wang, L.; Ai, T.; Shen, Y.; Li, J. The isotropic organization of DEM structure and extraction of valley lines using hexagonal grid. Trans. Gis 2020, 24, 483–507. [Google Scholar] [CrossRef]
- Amiri, A.M.; Samavati, F.; Peterson, P. Categorization and conversions for indexing methods of discrete global grid systems. ISPRS Int. J. Geo-Inf. 2015, 4, 320–336. [Google Scholar] [CrossRef]
- Sahr, K.; White, D.; Kimerling, A.J. Geodesic Discrete Global Grid Systems. American Cartographer. Cartogr. Geogr. Inf. Sci. 2003, 30, 121–134. [Google Scholar] [CrossRef]
- Mahdavi Amiri, A.; Alderson, T.; Samavati, F. Geospatial Data Organization Methods with Emphasis on Aperture-3 Hexagonal Discrete Global Grid Systems. Cartogr. Int. J. Geogr. Inf. Geovis. 2019, 54, 30–50. [Google Scholar] [CrossRef]
- Gibb, R.G. The rHEALPix discrete global grid system. IOP Conf. Ser. Earth Environ. Sci. 2016, 34, 012012. [Google Scholar] [CrossRef]
- Goodchild, M.F. The Application of Advanced Information Technology in Assessing Environmental Impacts. Soil Sci. Soc. Am. 1996, 48, 1–17. [Google Scholar]
- Li, D.; Zhang, G.; Jiang, Y.H.; Shen, X.; Liu, W. Opportunities and challenges of geo-spatial information science from the perspective of big data. Big Data Res. 2022, 8, 3–14. [Google Scholar]
- Zhao, L.; Li, G.; Yao, X.; Ma, Y. Code Operation Scheme for the Icosahedral Hexagonal Discrete Global Grid System. Geo-Inf. Sci. 2023, 25, 239–251. [Google Scholar]
- Lunetta, R.; Congalton, R.; Fenstermaker, L.; Jensen, J.; Mcgwire, K.; Tinney, L.R. Remote sensing and geographic information system data integration: Error sources and Research Issues. Photogramm. Eng. Remote Sens. 1991, 57, 677–687. [Google Scholar]
- Dutton, G. Universal geospatial data exchange via global hierarchical coordinates. In Proceedings of the International Conference on Discrete Global Grids, Santa Barbara, CA, USA, 26–28 March 2000. [Google Scholar]
- White, D.; Kimerling, A.J.; Sahr, K.; Song, L. Comparing area and shape distortion on polyhedral-based recursive partitions of the sphere. Int. J. Geogr. Inf. Syst. 1998, 12, 805–827. [Google Scholar] [CrossRef]
- Shortridge, A.M. Geometric variability of raster cell class assignment. Int. J. Geogr. Inf. Sci. 2004, 18, 539–558. [Google Scholar] [CrossRef]
- Frolov, Y.S.; Maling, D.H. The accuracy of area measurement by point counting techniques. Cartogr. J. 1969, 6, 21–35. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Burrough, P.A.; McDonnell, R.A.; Lloyd, C.D. Principles of Geographical Information Systems; Oxford University Press: Oxford, UK, 2015. [Google Scholar]
- Ma, Y.; Li, G.; Yao, X.; Cao, Q.; Zhang, L. A Precision Evaluation Index System for Remote Sensing Data Sampling Based on Hexagonal Discrete Grids. Int. J. Geo-Inf. 2021, 10, 194. [Google Scholar] [CrossRef]
- Ma, Y.; Li, G.; Zhao, L.; Yao, X. An Accuracy Evaluation Method for Multi-source Data Based on Hexagonal Global Discrete Grids. In Proceedings of the International Conference on Spatial Data and Intelligence, Nanchang, China, 25–27 April 2024. [Google Scholar]
- Li, Q.; Wang, T.; Zhu, J.; Zhang, F. Vector data rasterization based on rendering and pickup. Geomat. Inf. Sci. Wuhan Univ. 2010, 35, 917–919. [Google Scholar]
- Wang, Y.; Chen, Z.; Cheng, L.; Li, M.; Wang, J. Parallel scanline algorithm for rapid rasterization of vector geographic data. Comput. Geosci. 2013, 59, 31–40. [Google Scholar] [CrossRef]
- Vauglin, F. A practical study on precision and resolution in vector geographical databases. In Spatial Data Quality; Taylor & Francis: London, UK, 2002; pp. 127–139. [Google Scholar]
- Van Der Knaap, W.G.M. The vector to raster conversion: (mis)use in geographical information systems. Int. J. Geogr. Inf. Syst. 1992, 6, 159–170. [Google Scholar] [CrossRef]
- Zhou, J.; Ben, J.; Wang, R.; Zheng, M.; Yao, X.; Du, L. A novel method of determining the optimal polyhedral orientation for discrete global grid systems applicable to regional-scale areas of interest. Int. J. Digit. Earth 2020, 13, 1553–1569. [Google Scholar] [CrossRef]
- Egenhofer, M.J.; Herring, J.J.T. Categorizing binary topological relations between regions, lines, and points in geographic databases. The 1990, 9, 76. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Res | Number of Cell * | Hexagonal Area (km2) | Pentagonal Area (km2) |
|---|---|---|---|
| 1 | 32 | 17,002,187.39080 | 14,168,489.49230 |
| 2 | 122 | 4,250,546.84778 | 3,542,122.37308 |
| 3 | 482 | 1,062,636.71193 | 885,553.59327 |
| 4 | 1922 | 265,659.17798 | 221,382.64832 |
| 5 | 7682 | 66,414.79448 | 55,345.66208 |
| 6 | 30,722 | 16,603.69862 | 13,836.41552 |
| 7 | 122,882 | 4150.92466 | 3,459,903,883 |
| 8 | 491,522 | 1037.73116 | 864.77597 |
| 9 | 1,966,082 | 259.43280 | 216.19400 |
| 10 | 7,864,322 | 64.85821 | 54.04850 |
| 11 | 33,457,282 | 16.21455 | 13.51212 |
| 12 | 125,829,122 | 4.05364 | 3.37803 |
| 13 | 503,316,482 | 1.01341 | 0.84451 |
| 14 | 2,013,265,922 | 0.25335 | 0.21113 |
| 15 | 8,053,063,682 | 0.06334 | 0.05278 |
| 16 | 32,212,254,722 | 0.01584 | 0.01320 |
| Weights of the Five Evaluation Indicators | |||||
|---|---|---|---|---|---|
| k | AR | OAR | PR | MEC | MBR |
| W | 0.7143 | 0.2500 | 0.7941 | 0.4474 | 0.3789 |
| Grid Level | Geographical Deviation (KM) | Angular Distortion | Length Distortion |
|---|---|---|---|
| 10 | 12.67 | 5.1374 | 1.0843726 |
| 11 | 3.54 | 2.0845 | 0.9341268 |
| 12 | 1.29 | 1.0547 | 1.5147326 |
| 13 | 0.76 | 0.4731 | 0.9718905 |
| Grid Level | Number of Grid Cells | Area Ratio | Overlap Area Ratio | Perimeter Ratio | MEC Area Ratio | MBR Area Ratio | Composite Index |
|---|---|---|---|---|---|---|---|
| 10 | 405 | 0.9297 | 0.9346 | 1.0615 | 0.9431 | 0.9513 | 0.9647 |
| 11 | 1489 | 0.9453 | 0.9578 | 1.0432 | 0.9678 | 0.9647 | 1.0435 |
| 12 | 5662 | 1.0212 | 0.9741 | 1.0225 | 0.9791 | 0.9815 | 1.0135 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Published by MDPI on behalf of the International Society for Photogrammetry and Remote Sensing. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Li, G.; Zhao, L.; Yao, X. Accuracy Evaluation Method for Vector Data Based on Hexagonal Discrete Global Grid. ISPRS Int. J. Geo-Inf. 2025, 14, 5. https://doi.org/10.3390/ijgi14010005
Ma Y, Li G, Zhao L, Yao X. Accuracy Evaluation Method for Vector Data Based on Hexagonal Discrete Global Grid. ISPRS International Journal of Geo-Information. 2025; 14(1):5. https://doi.org/10.3390/ijgi14010005
Chicago/Turabian StyleMa, Yue, Guoqing Li, Long Zhao, and Xiaochuang Yao. 2025. "Accuracy Evaluation Method for Vector Data Based on Hexagonal Discrete Global Grid" ISPRS International Journal of Geo-Information 14, no. 1: 5. https://doi.org/10.3390/ijgi14010005
APA StyleMa, Y., Li, G., Zhao, L., & Yao, X. (2025). Accuracy Evaluation Method for Vector Data Based on Hexagonal Discrete Global Grid. ISPRS International Journal of Geo-Information, 14(1), 5. https://doi.org/10.3390/ijgi14010005