

Revealing Schematic Map Designs with Preservation of Relativity in Node Position and Segment Length in Existing Official Maps

Abstract
1. Introduction
- (1)
- How well are the relative relations preserved in existing official schematic maps?
- (2)
- Should there be a priority for preserving different relative relations?
- (3)
- To what extent are relative relations preserved in existing official schematic maps?
2. Methods
2.1. Relative Relations in Network Map Schematization: Definitions
2.2. Relative Relations in Network Map Schematization: Global vs. Local
- (1)
- The near distance of a node is defined as the maximum straight-line distance from that node to its adjacent nodes connected by a segment.
- (2)
- The middle vertex of a segment is used to represent the segment. The near distance of a segment is defined as the maximum straight-line distance from the middle vertex of the segment to the middle vertex of its connecting segments.
- (3)
- The far distance for a node is defined as the maximum value of the straight-line distance from the node to all other nodes in the network.
- (4)
- The far distance for a segment is defined as the maximum value of the straight-line distance from the middle vertex of the segment to the middle vertex of all segments in a network.
- (5)
- The medium distance is the mean value of the near and far distances.
2.3. Relative Relations in Network Map Schematization: A Strategy
3. Results of Experiment 1: Estimating Preservation Ratios of Relative Relations in Official Schematic Maps
3.1. Measures for Estimating the Preservation Ratios of Relative Relations
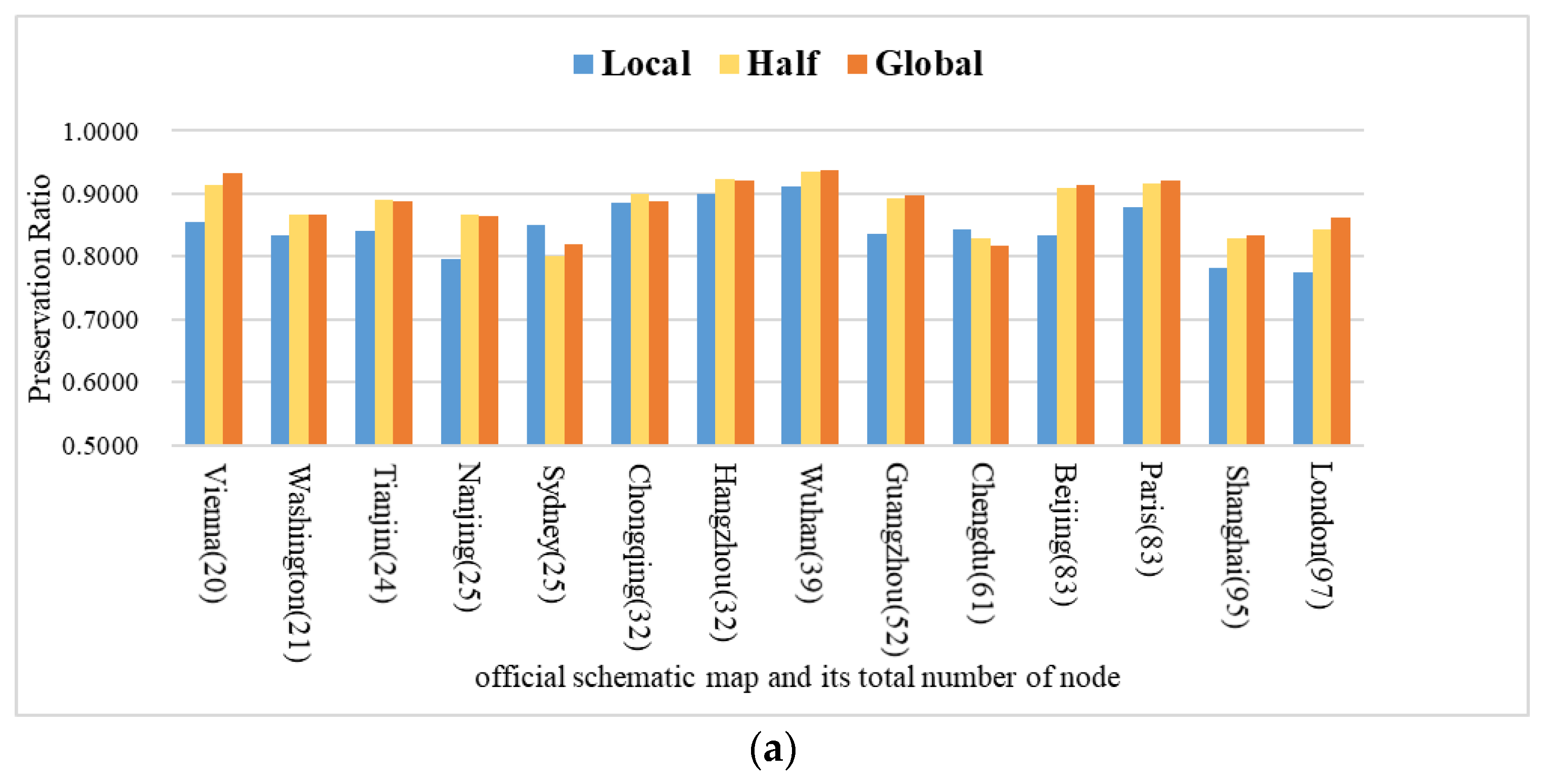
3.2. Preservation Ratios of 32 Official Maps: Over 78%
3.3. Significant Difference between Global and Local Preservation Ratios
4. Results of Experiment 2: A Comparative Analysis for Preserving Relative Relations with and without Significant Enlargement of Dense Regions
4.1. One-Tailed t-Tests to Reveal Significant Differences in Local and Global Preservation
4.2. One-Tailed t-Tests to Reveal Significant Differences between Groups A and B
5. Discussion: Possible Designs for Preserving Relative Relations Using a Reference Object
5.1. Central Region Reference Objects for Preserving Relative Relations
5.2. Major Axes as Reference Objects for Preserving Relative Relations
6. Conclusions
- (1)
- Relative relations were well-preserved in manually designed products, with preservation ratios exceeding 80% in almost all cases, except for the local preservation ratio of relative position, which was approximately 79%.
- (2)
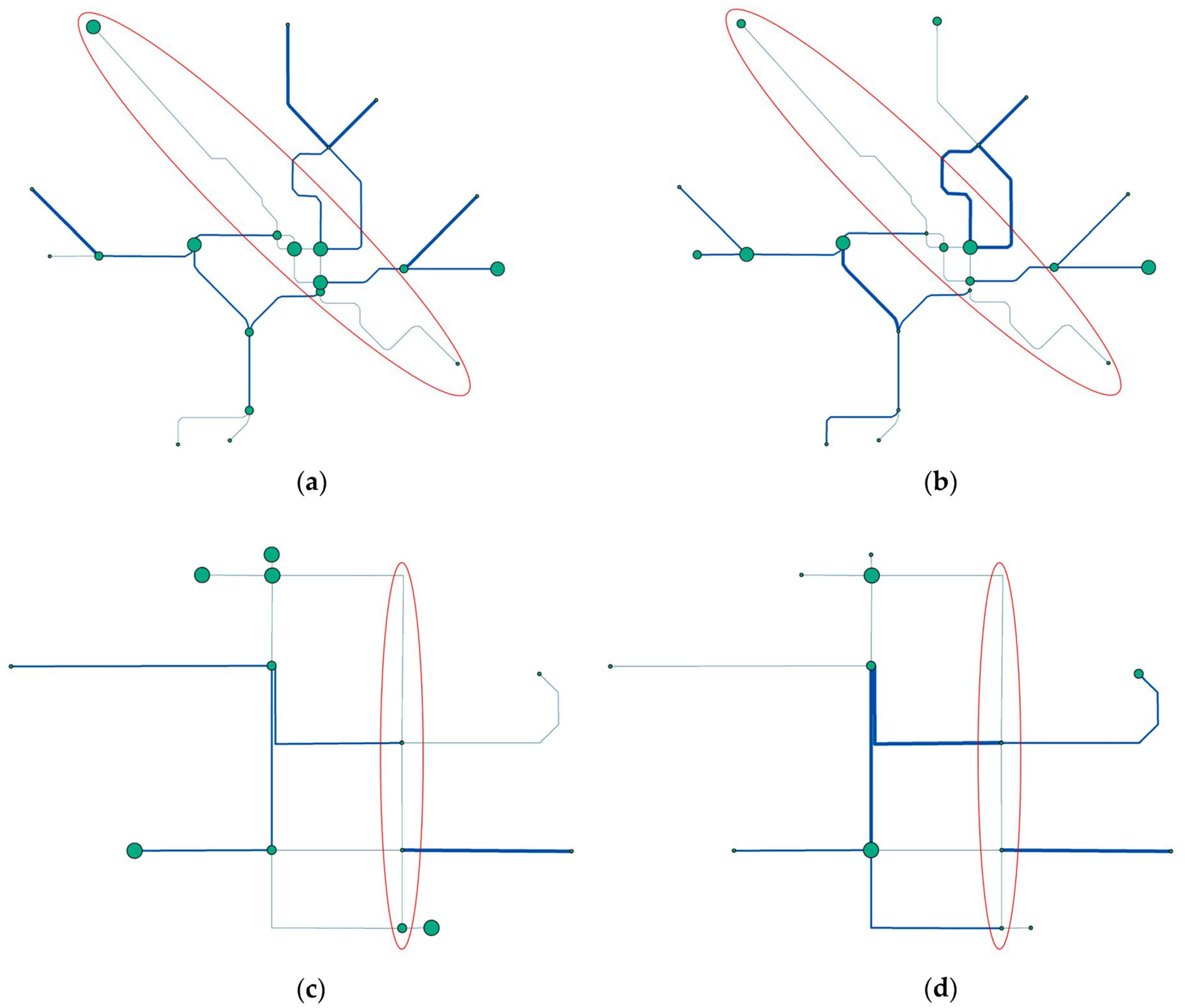
- Global preservation ratios for different relative relations were significantly higher than local preservation ratios in manual designs. Notably, when facing larger distortions in map design, such as the enlarging of the central dense region in the London tube map, the preservation ratios of relative positions exceeded those of relative lengths in the manual designs.
- (3)
- The qualitative analysis comparing preservation ratios led to the observation that designers may adopt the use of a reference object, like the central dense region in the London tube map or a major axis in the Washington tube map, to preserve relative relations in existing official schematic maps.
- (1)
- Based on the third finding, a design rule can be formed: relative positions have a higher preservation priority than relative lengths.
- (2)
- Considering preservation methods used in existing official schematic maps, the use of reference axes or lines may serve as characteristics for the main structure of a network [34].
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
































































References
- Barkowsky, T.; Freksa, C. Cognitive Requirements on Making and Interpreting Maps; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 1997; pp. 347–361. ISBN 9783540636236. [Google Scholar]
- Klippel, A.; Richter, K.-F.; Barkowsky, T.; Freksa, C. The Cognitive Reality of Schematic Maps. In Map-Based Mobile Services; Springer: Berlin/Heidelberg, Germany, 2005; pp. 55–71. ISBN 9783540230557. [Google Scholar]
- Ware, J.M.; Anand, S.; Taylor, G.E.; Thomas, N. Automated Production of Schematic Maps for Mobile Applications. Trans. GIS 2006, 10, 25–42. [Google Scholar] [CrossRef]
- Anand, S.; Avelar, S.; Ware, J.M.; Jackson, M. Automated Schematic Map Production Using Simulated Annealing and Gradient Descent Approaches. In Proceedings of the 15th Annual GIS Research UK Conference, Dublin, Ireland, 11–13 April 2007; pp. 54–60. [Google Scholar]
- Avelar, S.; Mueller, M. Generating Topologically Correct Schematic Maps. In Proceedings of the 9th International Spatial Data Handling, Beijing, China, 10–12 August 2000. [Google Scholar]
- Merrick, D.; Gudmundsson, J. Path Simplification for Metro Map Layout. In Graph Drawing; Springer: Berlin/Heidelberg, Germany, 2007; pp. 258–269. ISBN 9783540709039. [Google Scholar]
- Li, Z.; Dong, W. A Stroke-Based Method for Automated Generation of Schematic Network Maps. Geogr. Inf. Syst. 2010, 24, 1631–1647. [Google Scholar] [CrossRef]
- Stott, J.; Rodgers, P.; Martínez-Ovando, J.C.; Walker, S.G. Automatic Metro Map Layout Using Multicriteria Optimization. IEEE Trans. Vis. Comput. Graph. 2011, 17, 101–114. [Google Scholar] [CrossRef]
- Noellenburg, M.; Wolff, A. Drawing and Labelling High-Quality Metro Maps by Mixed-Integer Programming. IEEE Trans. Vis. Comput. Graph. 2011, 17, 626–641. [Google Scholar] [CrossRef]
- Ti, P.; Li, Z.; Xu, Z. Automated Generation of Schematic Network Maps Adaptive to Display Sizes. Cartogr. J. 2015, 52, 168–176. [Google Scholar] [CrossRef]
- Lan, T.; Li, Z.; Ti, P. Integrating General Principles into Mixed-Integer Programming to Optimize Schematic Network Maps. Geogr. Inf. Syst. 2019, 33, 2305–2333. [Google Scholar] [CrossRef]
- Lan, T.; Li, Z.L.; Wang, J.; Gong, C.; Ti, P. An Anns-Based Method for Automated Labelling of Schematic Metro Maps. ISPRS Int. J. Geoinf. 2022, 11, 36. [Google Scholar] [CrossRef]
- Galvão, M.L.; Krukar, J.; Schwering, A. Evaluating Schematic Route Maps in Wayfinding Tasks for In-Car Navigation. Cartogr. Geogr. Inf. Sci. 2021, 48, 449–469. [Google Scholar] [CrossRef] [PubMed]
- Lan, T.; Li, Z.L.; Peng, Q.; Gong, X. Automated Labeling of Schematic Maps by Optimization with Knowledge Acquired from Existing Maps. Trans. GIS 2020, 24, 1722–1739. [Google Scholar] [CrossRef]
- Wu, H.Y.; Niedermann, B.; Takahashi, S.; Nöllenburg, M. A Survey on Computing Schematic Network Maps: The Challenge to Interactivity. arXiv 2022, arXiv:2208.07301. [Google Scholar]
- Taukebayev, O.; Seitkazy, M.; Salmurzauly, R.; Sakhariyev, B.; Aktymbayeva, A.; Tussupkanova, A.; Batay, G. Creating Schematic Map of Tourist Routes and Infrastructure of Ayusai Gorge (Ile-Alatau National Park). J. Geogr. Environ. Manag. 2021, 62, 78–91. [Google Scholar]
- Bauer, C.; Bernd, L. Schematic Maps and Indoor Wayfinding. In Proceedings of the 14th International Conference on Spatial Information Theory (COSIT 2019), Regensburg, Germany, 9–13 September 2019. [Google Scholar]
- Listabarth, J. Automated Polygon Schematization for Thematic Maps. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2021. [Google Scholar]
- Avelar, S.; Hurni, L. On the Design of Schematic Transport Maps. Cartogr. Int. J. Geogr. Inf. Geovis. 2006, 41, 217–228. [Google Scholar] [CrossRef]
- Ti, P.; Li, Z. Generation of Schematic Network Maps with Automated Detection and Enlargement of Congested Areas. Geogr. Inf. Syst. 2014, 28, 521–540. [Google Scholar] [CrossRef]
- Barkowsky, T.; Latecki, L.J.; Richter, K.-F. Schematizing Maps: Simplification of Geographic Shape by Discrete Curve Evolution; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2000; pp. 41–53. ISBN 9783540675846. [Google Scholar]
- Roberts, M.J.; Gray, H.; Lesnik, J. Preference versus Performance: Investigating the Dissociation between Objective Measures and Subjective Ratings of Usability for Schematic Metro Maps and Intuitive Theories of Design. Int. J. Hum. Comput. Stud. 2017, 98, 109–128. [Google Scholar] [CrossRef][Green Version]
- Ti, P.; Li, Z.; Xu, Z.; Jia, H. Optimizing the Balance between Area and Orientation Distortions for Variable-Scale Maps. ISPRS J. Photogramm. Remote Sens. 2016, 117, 237–242. [Google Scholar] [CrossRef]
- Pullar, D.; Egenhofer, M. Toward Formal Definitions of Topological Relations among Spatial Objects. In Proceedings of the Third International Symposium on Spatial Data Handling, Sydney, Australia, 17–19 August 1988. [Google Scholar]
- Papadias, D.; Sellis, T. Qualitative Representation of Spatial Knowledge in Two-Dimensional Space. VLDB J. 1994, 3, 479–516. [Google Scholar] [CrossRef]
- Clementini, E.; Felice, P.D.; Hernández, D. Qualitative Representation of Positional Information. Artif. Intell. 1997, 95, 317–356. [Google Scholar] [CrossRef]
- Guo, Z. Mind the Map! The Impact of Transit Maps on Path Choice in Public Transit. Transp. Res. Part A Policy Pract. 2011, 45, 625–639. [Google Scholar] [CrossRef]
- Casakin, H.; Barkowsky, T.; Klippel, A.; Freksa, C. Schematic Maps as Wayfinding Aids; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2000; pp. 54–71. ISBN 9783540675846. [Google Scholar]
- Gemsa, A. Schematized Visualizations of Shortest Paths in Road Networks. In Proceedings of the Informatiktage, Boon, Germany, 19–20 March 2010. [Google Scholar]
- Gemsa, A.; Nöllenburg, M.; Pajor, T.; Rutter, I. On D-Regular Schematization of Embedded Paths. In SOFSEM 2011: Theory and Practice of Computer Science; Springer: Berlin/Heidelberg, Germany, 2011; pp. 260–271. ISBN 9783642183805. [Google Scholar]
- Agrawala, M.; Stolte, C. Rendering Effective Route Maps: Improving Usability through Generalization. In Proceedings of the Special Interest Group on Computer Graphics, New York, NY, USA, 1 August 2001; pp. 241–250. [Google Scholar]
- Ti, P.; Dai, R.Y.; Wan, F.Y.; Xiong, T.; Wu, H.; Li, Z.L. Influencing Pedestrians’ Route Choice Using Route Shape Simplification. ISPRS Int. J. Geo-Inf. 2023, 12, 66. [Google Scholar] [CrossRef]
- Liu, Z.; Li, Z.L. Impact of Schematic Designs on the Cognition of Underground Tube Map. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 421–423. [Google Scholar] [CrossRef]
- Li, Z. General Principles for Automated Generation of Schematic Network Maps. Cartogr. J. 2015, 52, 356–360. [Google Scholar] [CrossRef]
- Avelar, S. Convergence Analysis and Quality Criteria for an Iterative Schematization of Networks. Geoinformatica 2007, 11, 497–513. [Google Scholar] [CrossRef]
- Wolff, A. Drawing Subway Maps: A Survey. Informatik 2007, 22, 23–44. [Google Scholar] [CrossRef]
- Grison, E. Schematic Map Design: From Performance to Preference? A Literature Review of Empiral Research. In Proceedings of the 2nd Schematic Mapping Workshop, Vienna, Vienna, 11–12 April 2019. [Google Scholar]
- Roberts, M.J.; Rose, D. Map-Induced Journey-Planning Biases for a Simple Network: A Docklands Light Railway Study. Transp. Res. Part A Policy Pr. 2016, 94, 446–460. [Google Scholar] [CrossRef]
- Lloyd, P.B.; Rodgers, P.; Roberts, M.J. Metro Map Colour-Coding: Effect on Usability in Route Tracing. In Diagrammatic Representation and Inference: In Proceedings of the 10th International Conference, Diagrams 2018, Edinburgh, UK, 18–22 June 2018; Springer International Publishing: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Retz-Schmidt, G. Various Views on Spatial Prepositions. Various Views on Spatial Prepositions. AI Mag. 1988, 9, 95–105. [Google Scholar]
- Hernández, D. Maintaining Qualitative Spatial Knowledge; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 1993; pp. 36–53. ISBN 9783540572077. [Google Scholar]
- Clementini, E. A Conceptual Framework for Modelling Spatial Relations. Inf. Technol. Contr. 2019, 48, 5–17. [Google Scholar] [CrossRef]
- Harrie, L.; Sarjakoski, L.T.; Lehto, L. A Variable-Scale Map for Small-Display Cartography. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 237–242. [Google Scholar]
- Haunert, J.-H.; Sering, L. Drawing Road Networks with Focus Regions. IEEE Trans. Vis. Comput. Graph. 2011, 17, 2555–2562. [Google Scholar] [CrossRef]
- Hernández, D.; Clementini, E.; Felice, P. Qualitative Distances; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 1995; pp. 45–57. ISBN 9783540603924. [Google Scholar]
- Frank, A.U. Qualitative Spatial Reasoning: Cardinal Directions as an Example. Int. J. Geogr. Inf. Sci. 1996, 10, 269–290. [Google Scholar] [CrossRef]
- Frank, A.U. Qualitative Spatial Reasoning about Distances and Directions in Geographic Space. J. Vis. Lang. Comput. 1992, 3, 343–371. [Google Scholar] [CrossRef]
- Jenny, B. Geometric Distortion of Schematic Network Maps. Bull. Soc. Cartogr. 2006, 40, 15–18. [Google Scholar]
- Li, Z.L. Algorithmic Foundation of Multi-Scale Spatial Representation; CRC Press: New York, NY, USA, 2007. [Google Scholar]
- Forrest, D. Causes and Consequences of Scale Change in Schematic Maps: Are Users Aware and Do They Care? In Proceedings of the Schematic Mapping Workshop, Essex, UK, 2–3 April 2014. [Google Scholar]
- Hochmair, H. The Influence of Map Design on Route Choice from Public Transportation Maps in Urban Areas. Cartogr. J. 2009, 46, 242–256. [Google Scholar] [CrossRef]
- Chen, J.; Wang, Y.H.; Wu, H.; Liu, W.Z. Basic Issues and Development Directions of High-Quality Development Empowered by Spatio-Temporal Information. J. Spatio-Temporal Inf. 2023, 30, 1–11. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Local | Half | Global | |
|---|---|---|---|
| Relative position | 78.98%/0.06 | 87.40%/0.01 | 88.34%/0.01 |
| Relative length | 81.59%/0.03 | 83.66%/0.02 | 83.62%/0.01 |
| Hypothesis: | t | T | Result | p | ||
|---|---|---|---|---|---|---|
| Relative position | local vs. half | H0: μ1 = μ2 H1: μ1 < μ2 | −9.36 | 1.65 | As t < -T, H1 is accepted | 0.00 |
| half vs. global | −2.00 | 1.65 | As t < -T, H1 is accepted | 0.02 | ||
| Relative length | local vs. half | −3.34 | 1.65 | As t < -T, H1 is accepted | 0.00 | |
| half vs. global | 0.09 | 1.65 | As t < T, H0 is accepted | 0.46 |
| Group | Local (Ratio/Variance) | Half (Ratio/Variance) | Global (Ratio/Variance) | |
|---|---|---|---|---|
| Relative position | A | 79.21%/0.06 | 87.40%/0.01 | 88.02%/0.01 |
| B | 78.30%/0.08 | 87.41%/0.02 | 89.29%/0.01 | |
| Relative length | A | 80.10%/0.03 | 82.87%/0.01 | 82.78%/0.01 |
| B | 87.23%/0.03 | 86.66%/0.02 | 86.81%/0.02 |
| Hypothesis: | t | T | Result | p | |||
|---|---|---|---|---|---|---|---|
| Group A | Relative position | local vs. half | H0: μ1 = μ2 H1: μ1 < μ2 | −8.30 | 1.65 | As t < -T, H1 is accepted | 0.00 |
| half vs. global | −1.22 | 1.65 | As t > -T, H0 is accepted | 0.11 | |||
| Relative length | local vs. half | −3.98 | 1.65 | As t < -T, H1 is accepted | 0.00 | ||
| half vs. global | H0: μ1 = μ2 H1: μ1 > μ2 | 0.18 | 1.65 | As t < T, H0 is accepted | 0.42 | ||
| Group B | Relative position | local vs. half | H0: μ1 = μ2 H1: μ1 < μ2 | −4.45 | 1.65 | As t < -T, H1 is accepted | 0.00 |
| half vs. global | −1.73 | 1.65 | As t < -T, H1 is accepted | 0.04 | |||
| Relative length | local vs. half | H0: μ1 = μ2 H1: μ1 > μ2 | 0.44 | 1.65 | As t < T, H0 is accepted | 0.33 | |
| half vs. global | H0: μ1 = μ2 H1: μ1 < μ2 | −0.13 | 1.65 | As t > -T, H0 is accepted | 0.45 |
| A vs. B | Hypothesis: | t | T | Result | p | |
|---|---|---|---|---|---|---|
| Relative position | local | H0: μ1 = μ2 H1: μ1 > μ2 | 0.39 | 1.65 | As t < T, H0 is accepted | 0.35 |
| half | H0: μ1 = μ2 H1: μ1 < μ2 | −0.14 | 1.65 | As t > -T, H0 is accepted | 0.44 | |
| global | −1.89 | 1.65 | As t < -T, H1 is accepted | 0.03 | ||
| Relative length | local | H0: μ1 = μ2 H1: μ1 < μ2 | −6.17 | 1.65 | As t < -T, H1 is accepted | 0.00 |
| half | −4.23 | 1.65 | As t < -T, H1 is accepted | 0.00 | ||
| global | −4.94 | 1.65 | As t < -T, H1 is accepted | 0.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ti, P.; Wu, H.; Li, Z.; Li, M.; Dai, R.; Xiong, T. Revealing Schematic Map Designs with Preservation of Relativity in Node Position and Segment Length in Existing Official Maps. ISPRS Int. J. Geo-Inf. 2023, 12, 309. https://doi.org/10.3390/ijgi12080309
Ti P, Wu H, Li Z, Li M, Dai R, Xiong T. Revealing Schematic Map Designs with Preservation of Relativity in Node Position and Segment Length in Existing Official Maps. ISPRS International Journal of Geo-Information. 2023; 12(8):309. https://doi.org/10.3390/ijgi12080309
Chicago/Turabian StyleTi, Peng, Hao Wu, Zhilin Li, Mingyao Li, Ruyu Dai, and Tao Xiong. 2023. "Revealing Schematic Map Designs with Preservation of Relativity in Node Position and Segment Length in Existing Official Maps" ISPRS International Journal of Geo-Information 12, no. 8: 309. https://doi.org/10.3390/ijgi12080309
APA StyleTi, P., Wu, H., Li, Z., Li, M., Dai, R., & Xiong, T. (2023). Revealing Schematic Map Designs with Preservation of Relativity in Node Position and Segment Length in Existing Official Maps. ISPRS International Journal of Geo-Information, 12(8), 309. https://doi.org/10.3390/ijgi12080309